宝元LNC-M528A系统参数
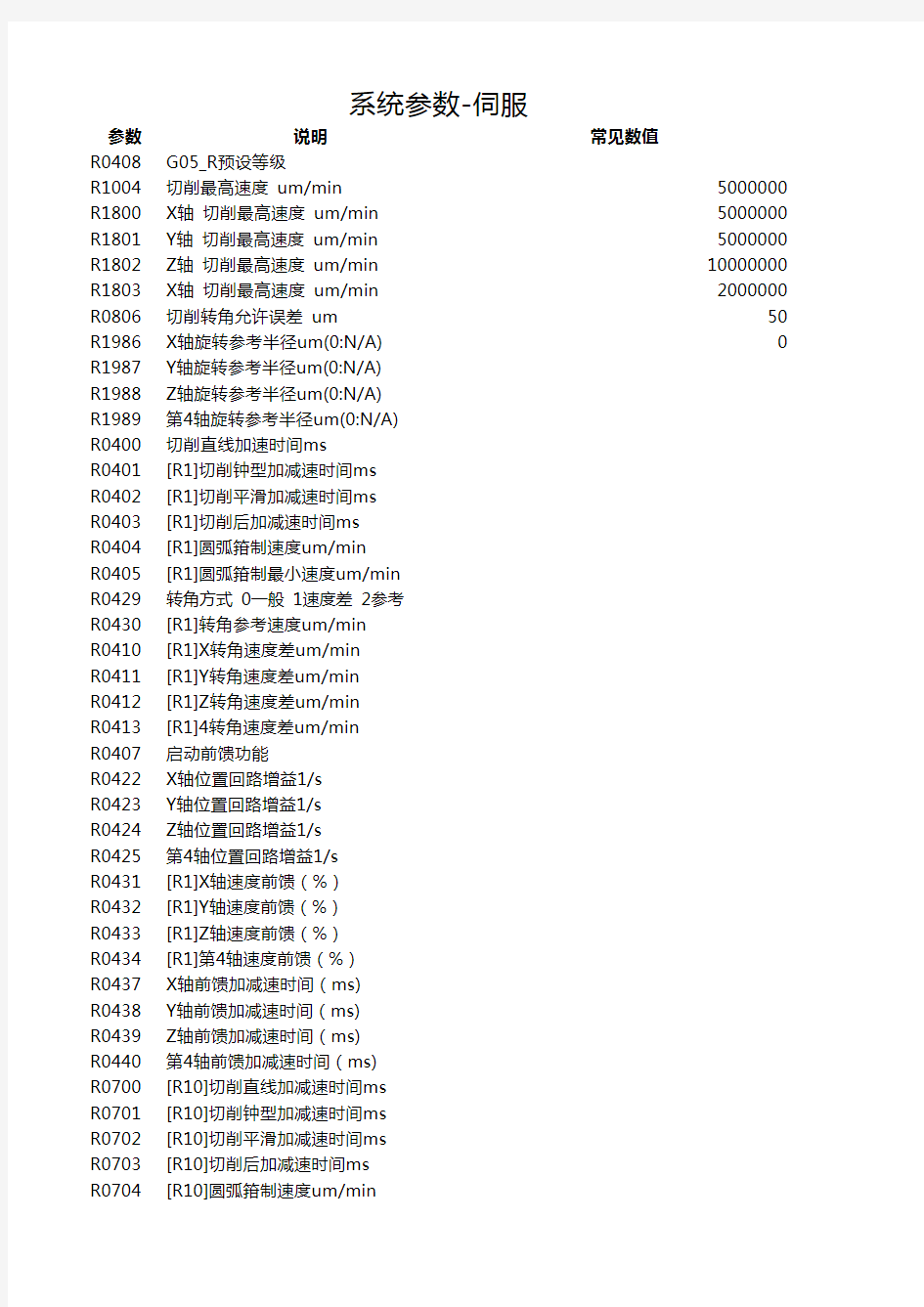
系统参数-伺服
参数说明常见数值
R0408G05_R预设等级
R1004切削最高速度 um/min5000000 R1800X轴 切削最高速度 um/min5000000 R1801Y轴 切削最高速度 um/min5000000 R1802Z轴 切削最高速度 um/min10000000 R1803X轴 切削最高速度 um/min2000000 R0806切削转角允许误差 um50 R1986X轴旋转参考半径um(0:N/A)0 R1987Y轴旋转参考半径um(0:N/A)
R1988Z轴旋转参考半径um(0:N/A)
R1989第4轴旋转参考半径um(0:N/A)
R0400切削直线加速时间ms
R0401[R1]切削钟型加减速时间ms
R0402[R1]切削平滑加减速时间ms
R0403[R1]切削后加减速时间ms
R0404[R1]圆弧箝制速度um/min
R0405[R1]圆弧箝制最小速度um/min
R0429转角方式 0一般 1速度差 2参考
R0430[R1]转角参考速度um/min
R0410[R1]X转角速度差um/min
R0411[R1]Y转角速度差um/min
R0412[R1]Z转角速度差um/min
R0413[R1]4转角速度差um/min
R0407启动前馈功能
R0422X轴位置回路增益1/s
R0423Y轴位置回路增益1/s
R0424Z轴位置回路增益1/s
R0425第4轴位置回路增益1/s
R0431[R1]X轴速度前馈(%)
R0432[R1]Y轴速度前馈(%)
R0433[R1]Z轴速度前馈(%)
R0434[R1]第4轴速度前馈(%)
R0437X轴前馈加减速时间(ms)
R0438Y轴前馈加减速时间(ms)
R0439Z轴前馈加减速时间(ms)
R0440第4轴前馈加减速时间(ms)
R0700[R10]切削直线加减速时间ms
R0701[R10]切削钟型加减速时间ms
R0702[R10]切削平滑加减速时间ms
R0703[R10]切削后加减速时间ms
R0704[R10]圆弧箝制速度um/min
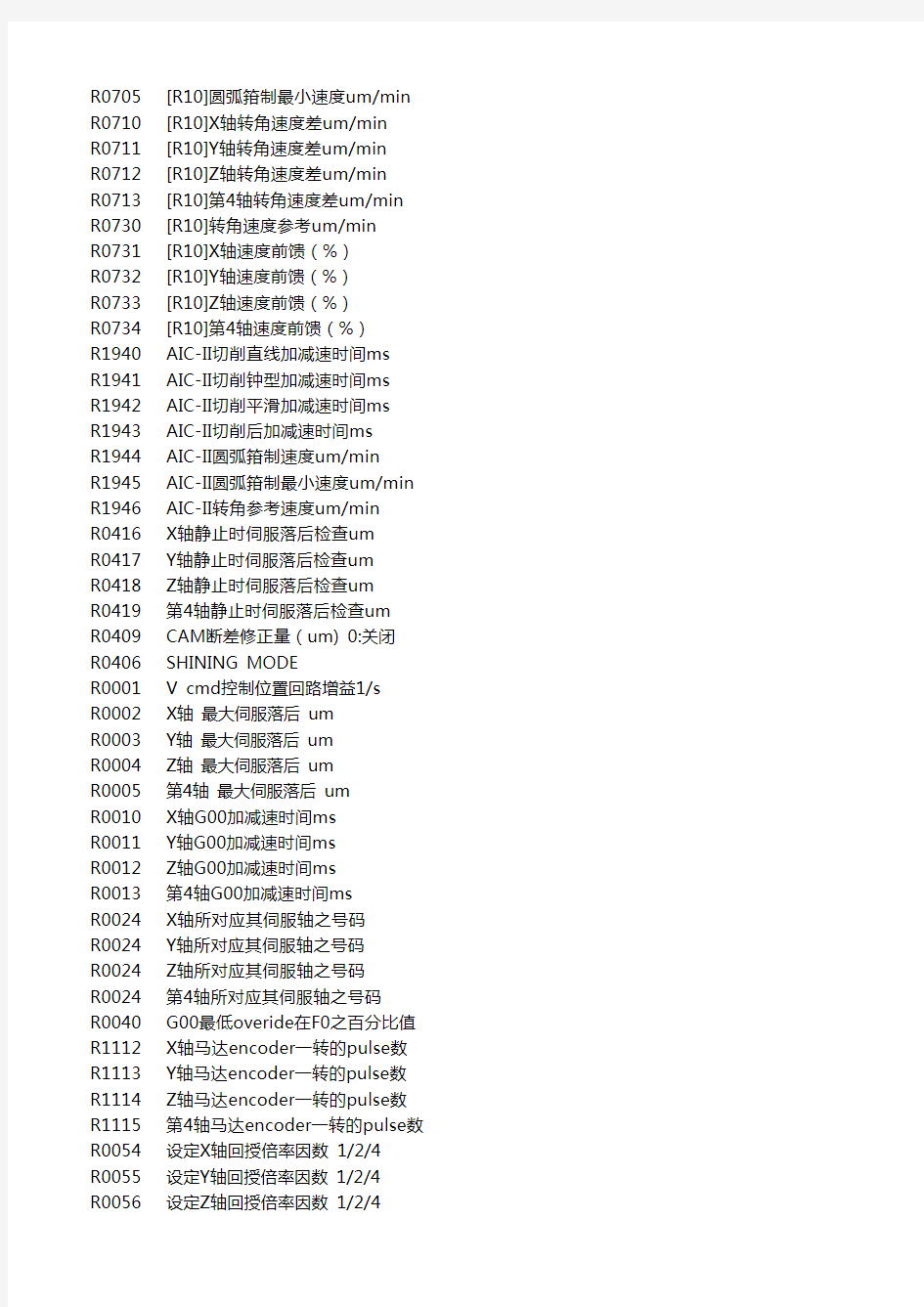
R0705[R10]圆弧箝制最小速度um/min
R0710[R10]X轴转角速度差um/min
R0711[R10]Y轴转角速度差um/min
R0712[R10]Z轴转角速度差um/min
R0713[R10]第4轴转角速度差um/min R0730[R10]转角速度参考um/min
R0731[R10]X轴速度前馈(%)
R0732[R10]Y轴速度前馈(%)
R0733[R10]Z轴速度前馈(%)
R0734[R10]第4轴速度前馈(%)
R1940AIC-II切削直线加减速时间ms
R1941AIC-II切削钟型加减速时间ms
R1942AIC-II切削平滑加减速时间ms
R1943AIC-II切削后加减速时间ms
R1944AIC-II圆弧箝制速度um/min
R1945AIC-II圆弧箝制最小速度um/min R1946AIC-II转角参考速度um/min
R0416X轴静止时伺服落后检查um
R0417Y轴静止时伺服落后检查um
R0418Z轴静止时伺服落后检查um
R0419第4轴静止时伺服落后检查um
R0409CAM断差修正量(um) 0:关闭
R0406SHINING MODE
R0001V cmd控制位置回路增益1/s
R0002X轴 最大伺服落后 um
R0003Y轴 最大伺服落后 um
R0004Z轴 最大伺服落后 um
R0005第4轴 最大伺服落后 um
R0010X轴G00加减速时间ms
R0011Y轴G00加减速时间ms
R0012Z轴G00加减速时间ms
R0013第4轴G00加减速时间ms
R0024X轴所对应其伺服轴之号码
R0024Y轴所对应其伺服轴之号码
R0024Z轴所对应其伺服轴之号码
R0024第4轴所对应其伺服轴之号码
R0040G00最低overide在F0之百分比值R1112X轴马达encoder一转的pulse数R1113Y轴马达encoder一转的pulse数R1114Z轴马达encoder一转的pulse数R1115第4轴马达encoder一转的pulse数R0054设定X轴回授倍率因数 1/2/4
R0055设定Y轴回授倍率因数 1/2/4
R0056设定Z轴回授倍率因数 1/2/4
R0057设定第4轴回授倍率因数 1/2/4
R0845设定X轴为 0线性 1旋转
R0846设定Y轴为 0线性 1旋转
R0847设定Z轴为 0线性 1旋转
R0066设定第第4轴为 0线性 1旋转
R0065使用绝对值式编码器BIT
R0108设定X轴马达增益值RPM/1V
R0109设定Y轴马达增益值RPM/1V
R0110设定Z轴马达增益值RPM/1V
R0111设定第4轴马达增益值RPM/1V
R0116伺服轴输出命令反相BIT
R0185伺服轴回授信号反相BIT
R0156X轴命令格式0:AB 1:CW 2:PD 3:V R0157Y轴命令格式0:AB 1:CW 2:PD 3:V R0158Z轴命令格式0:AB 1:CW 2:PD 3:V R0159第4轴命令格式0:AB 1:CW 2:PD 3:V R0191X轴Encoder讯号格式
R0192Y轴Encoder讯号格式
R0193Z轴Encoder讯号格式
R0194第4轴Encoder讯号格式
R0800X轴G00位置检查视窗范围um
R0801Y轴G00位置检查视窗范围um
R0802Z轴G00位置检查视窗范围um
R0803第4轴G00位置检查视窗范围um