二自由度机器人的结构设计与仿真
二自由度机器人的结构设计与仿真
学院:专业:姓名:指导老师:
机械与车辆学院
机械电子工程
学号:
职称:教授
中国·XX
二○一二年五月
毕业设计诚信承诺书
本人郑重承诺:本人承诺呈交的毕业设计《二自由度机器人的结构设计与仿真》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。
本人签名:
日期:年月日
二自由度机器人的结构设计与仿真
摘要
并联机器人有着串联机器人所不具有的优点,在应用上与串联机器人形成互补关系。二自由度并联机器人是并联机器人家族中的重要组成部分,由于结构简单、控制方便和造价低等特点,有着重要的应用前景和开发价值。本论文研究了一种新型二自由度平移运动并联机构,该并联机构采用类五杆机构,平行四边形刚架结构来实现,可有效地消除铰链间隙,提高动平台的工作性能,同时有抵抗切削颠覆力矩的能力。
根据该二自由度平面机构的工作空间,利用平面几何的方法求得连杆的长度,并通过Pro/E软件进行仿真检验,并通过软件仿真的方式,优化连杆长度,排除奇异点,同时合理设计机械结构的尺寸,完成结构设计。
对该二自由度并联机器人,以Pro/E为平台,建立两自由度平移运动并联机器人运动仿真模型,验证了机构的实际工作空间和运动情况。最后指出了本机构的在实际中的应用。并使用AutoCAD软件进行了重要装置和关键零件的工程图绘制工作,利用ANSYS 软件分析了核心零件的力学性能。研究结果表明,本文所设计的二自由度机器人性能良好、工作灵活,很好地满足了设计指标要求,并已具备了一定的实用性。
关键词:二自由度;并联机器人;仿真;结构设计;Pro/E
2-DOF robot structure design and simulation
Abstract
Parallel robot has a series of advantages of the robot does not have to form a complementary relationship between the application and the series robot. The 2-DOF parallel robot is an important part of the family of parallel robots. The structure is simple, convenient and cost control and low, with significant potential applications and the development value. In this thesis, a new 2- DOF translational motion parallel mechanism, the analogous mechanism for class five institutions, parallelogram frame structure, which can effectively eliminate the hinge gap and improve the performance of the moving platform, while resistance to cutting subvert the torque capacity.
The working space of the 2-DOF planar mechanism, the use of plane geometry to obtain the length of the connecting rod, and the Pro/E software simulation test, and software simulation to optimize the connecting rod length, excluding the singular point, while the size of the rational design of mechanical structure, complete the structural design. And important equipment and key parts of the engineering drawings using AutoCAD software, using ANSYS software to analyze the mechanical properties of the core parts.
The 2-DOF parallel robot to the Pro/E platform, the establishment of the 2-DOF of translational motion parallel robot simulation model to verify the organization's actual work space and movement. Finally, this institution in the practical application. The results show that the combination of good motor performance of the 2-DOF parallel robot,good to meet the index requirements, and already have a certain amount of practicality.
Keywords: 2-DOF; parallel robot; simulation; structural design; Pro/E
目录
1前言 (1)
1.1本课题的研究背景及意义 (1)
1.1.1什么是机器人 (1)
1.1.2机器人技术的研究意义 (1)
1.2机器人的历史与发展现状 (2)
1.2.1机器人的发展历程 (2)
1.2.2机器人的主要研究工作 (3)
1.2.3少自由度机器人的发展历程 (4)
1.3本课题的研究内容 (5)
2二自由度机器人系统方案设计 (7)
2.1二自由度并联机器人机构简介 (7)
2.2执行机构方案设计及分析 (7)
3二自由度机器人的结构设计与运动分析 (8)
3.1已知设计条件及参数 (8)
3.1.1连杆机构自由度计算 (8)
3.1.2五杆所能达到的位置计算 (8)
3.2对机构主体部分的运动学逆解分析 (10)
3.2.1位置分析 (10)
3.2.2速度与加速的分析 (11)
3.3受力分析 (12)
4基于Pro/E软件环境下二自由度机器人的结构设计 (16)
4.1 Pro/E软件简介 (16)
4.2驱动元器件的选择 (17)
4.2.1步进电机的选择 (17)
4.2.2联轴器选择 (18)
4.3平面连杆机构的结构参数确定 (19)
4.4输入轴的设计 (20)
4.5安装支架的参数确定 (21)
5基于Pro/E软件环境下的机器人装配及动态仿真 (23)
5.1虚拟装配过程 (23)
5.1.1连杆机构的装配 (23)
5.1.2安装支架的装配 (24)
5.1.3完成二自由度机器人的最终装配 (24)
5.2基于Pro/E软件环境下的动态仿真 (25)
6基于AutoCAD软件环境下的机械结构设计 (31)
6.1AutoCAD软件简介 (31)
6.2平面连杆机构的结构设计 (32)
6.3机架的结构部件图绘制 (33)
6.4二自由度机器人工程图绘制 (34)
7基于Ansys软件环境下的有限元分析 (36)
7.1Ansys软件简介 (36)
7.2对输入轴的有限元分析 (37)
7.3对输入连杆的有限元分析 (37)
8 总结与展望 (40)
8.1课题研究工作总结 (40)
8.2研究展望 (41)
参考文献 (42)
致谢 (44)
附录(一) (45)
附录(二) (52)
1前言
机器人技术是一门光机电高度综合、交叉的学科,它涉及机械、电气、力学、控制、通信等诸多方面。机器人技术的发展,应该说是利用科学技术发展的一个综合性的结果,同时,也是为社会经济发展产生了重大影响的一门科学技术。随着社会的发展,人们不断探讨自然、改造自然、认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科学技术发展过程中的一个客观需要。
1.1本课题的研究背景及意义
1.1.1什么是机器人
机器人(Robot)的研究是由仿生学、机械工程学和控制工程学等多学科相互融合而形成的一门综合性学科,它代表了机电一体化的最高成就,所研究的机器人是一种能够代替人从事多类工作的高度灵活的自动化机械,而机器人技术研究的一个主要目的就是使其能够代替人劳动,能够灵活自如地完成人所能完成的和难以胜任的工作。
1.1.2机器人技术的研究意义
机器人技术的出现和发展不仅使传统的工业生产发生根本性的变化,而且对人类的社会生活也产生了深远的影响。最初人们应用开环串联作为机器人操作机,因为它们具有像人手臂一样的广阔运动空间以及灵活机动性等优点,但由于它们是悬臂结构,故承载能力差,在重载情况下容易弯曲变形,在高速运动时容易振动,且精确定位能力也不理想;后来人们观察生物世界,发现动物肢体由多个并行的腿支撑,负载时平稳,人类自身用双手配合拿起重物时也较单臂时轻松,三个并行手指精确的使用能够完成像书写这样的精细工作,人类从中受到启迪,开始研制并联机器人,并希冀并联机器人具有较好的刚性和定位能力,从而更大限度满足人们生活娱乐的需要[1]。
近20年来并联机器人备受人们关注,越来越多的国内外学者开始从不同方向从事并联机器人技术的研究工作,越来越多的并联机器人在机械加工、仿生、军事、医疗、生物、宇航和海洋工程等领域得到应用作为一种先进的生产工具,利用机器人不仅能够完成大量简单重复性工作,而且可以完成许多以前必须通过人工才能完成的复杂工作,在提高效率的同时改善了质量。但传统的串联机器人存在关节误差累积效应、末端执行器刚度较低和负载驱动能力有限等问题,这都限制了串联机器人在实际应用中的性能。为了弥补串联机器人的不足,人们提出了一种新型的具有多运动链结构的机器人——并
联机器人。从机构学上看,并联机器人具有运动惯量低、刚度大、负载能力强等优点,这恰恰弥补了串联机器人的不足,使得并联机器人成为一个潜在的高性能运动平台。
由于实际应用的需要,目前对机构简单、驱动元件少、成本低、工作空间比较大的少自由度机构的研究,已成为机构学领域的一个热点问题。目前,国际学术界和工程界对研究和开发并联机床非常重视,对这种新型数控装备的工程应用前景和市场潜力极为乐观,纷纷投入人量人力和物力竟相开发,并从20世纪90年代初以来相继推出多种结构相似而名称各异的产品化样机。随着并联机器人技术的发展,少自由度并联机构因其结构简单、经济,引起了许多学者的广泛兴趣。
1.2机器人的历史与发展现状
1.2.1机器人的发展历程
并联机器人的出现可以追溯至20世纪30年代。1931年,Gwinnett[2]在其专利中提出了一种基于球面并联机构的娱乐装置,如图1.1所示;1940年,Pollard[3]在其专利中提出了一种空间工业并联机构,用于汽车的喷漆;如图 1.2 所示;之后,Gough[4]在1962年发明了一种基于并联机构的六自由度轮胎检测装置;如图 1.3所示;三年后,Stewart[5]首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动装置,如图1.4所示,且把它命名为Gough-Stewart机构或Stewart机构,目前“Stewart Platform”已成为并联机器人领域中使用最多的名词之一。
图1.1 并联娱乐装置图1.2 Pollard并联机构
图1.3 Gough并联机构图1.4 Stewart 并联机构近几十年来,德国、意大利、法国及英国的机器人产业发展比较快。目前,世界上
机器人无论是从技术水平上,还是从己装备的数量上,优势集中在以美日为代表的少数几个发达的工业化国家。我国工业机器人起步于20世纪70年代初,大致可分为三个阶段:70 年代萌芽期,80年代的开发期,90年代的实用化期。
1965年美国的D.Stewart发明了六自由度并联机构并用于飞行模拟器中训练飞行员;澳大利亚著名机构学教授K.H.Hunt[6]在1978 年提出可以应用6自由度的Stewart 平台机构作为机器人机构将并联机构Parallel Manipulator用于机器人手臂并提出多种形式的并联结构对其可行性进行了系统研究。自1978年Hunt提出并联机器人结构模型以来,并联机器人的研究受到许多学者的关注,美国、日本先后有Rooney Ficher、Duffy Sugimoto等一批学者从事研究;英国、德国、俄罗斯等一批欧洲国家也在研究Ficher 对六自由度并联机器人机构的基础理论、基本结构及其奇异性等。国内燕山大学的黄真教授自1982年以来在美国参加了此项内容的研究,并于1983年取得了突破性的进展。在国内,黄真教授在并联机器人方面做出了较突出的贡献,1991年他研制出我国第一台六自由度并联机器人样机,如图1.5所示;1994年又研制出柔性铰链并联式六自由度机器人误差补偿器,如图1.6所示;然后在1997年出版了我国第一部关于并联机器人理论及技术的专著。
图1.5 并联机器人样机图1.6 机器人误差补偿器迄今为止,多自由度机械手的样机各种各样,包括平面、空间不同的自由度的机构以及超多自由度并串联机构。大致说来,60年代曾用来开发飞行模拟器,70年代提出并联机械手的概念,80年代末期开始研制并联机器人机床,90年代利用并联机构开发起重机。日本的田和雄、内山胜等人则利用并联机构开发宇宙飞船空间对接器等。1.2.2机器人的主要研究工作
多自由度机械手的理论研究涉及到许多现代控制、现代测量、建模仿真等科技。因此,有大量理论研究工作在深入进行。目前,主要的研究工作有以下几个方面:
1.设计理论研究。由于有些机械手具有作业空间小和奇异点多的不足,目前理论的
研究有是围绕着扩大作业空间、改善灵活性、回避奇异点的运动特性和运动规律,这涉及到结构学、运动学、动力学、机构学、数学等研究领域。
2.控制技术研究。目前对控制方法、控制精度、数控编程等方面分别进行了研究,其关键技术是通过机械手各个驱动杆的控制,实现X轴、Y轴和Z轴的控制,使指定点精确地到达指定位置。
3.误差分析研究。由于存在着许多其它影响精度的因素,如制造和安装误差,连接杆上下铰接处的间隙,杆长偏差对动平台位置精度的影响等等。一些学者对此进行了专门的研究并建立了相应的精度分析模型。
近年来,随着控制控制理论和计算机技术的快速发展,以机器人为核心的自动化生产设备成为现代产业的一个重要支柱,它大大提高了生产的质量和效率。由于机器人在生产、生活等方面的广泛应用,对机器人的控制研究一直是该领域专家的研究重点。
1.2.3少自由度机器人的发展历程
在并联机器人机构体系中,有着多种机构种类划分方法,按照自由度划分,有2个自由度、3个自由度、4个自由度、5个自由度和6个自由度并联机器人,其中2~5个自由度机器人被称为少自由度机器人;按照机器人机构结构划分,可分为平面结构机器人、球面结构机器人和空间结构机器人。多自由度机械手以其独特的结构和先进的控制技术,其在生产生活中的地位越来越重要。当制造业面临全球市场竞争,必须以快速响应求生存、求发展的时候,机械手的一些优点具有明显的市场潜力和良好的发展前景就显现了出来。现代社会对工业机器人的操作性能和运行速度的要求不断提高,实际工程应用的要求促使人们去研究具有刚度好、运行速度快负载能力强的新型机器人。80年代以来世界各国纷纷开展基于并联机构机器人的研究与开发并在部分场合得到了应用。但是目前仍然存在着工作空间较小、运动范围有限的缺点。因此,如何做工作空间较大的工业机器人臂、如何开发具有高速重载特点的机器人,也就是说具有新的功能特点的并串联复合机器人,这是个值得深入研究和探讨的问题。
由于多自由度的机器人存在建模困难、运动耦合和对元件精度要求高等不足,而且在许多情况下用户并不需要六自由度机械手,低于六自由度即可满足实际要求。因此,近年来一些少自由度并联机构成为新的研究热点,少自由度机构具有结构简单、造价低等特点,在实际领域中有着广泛的应用前景。许多学者研究了少自由度机构,有两转动一平动、三转动两平动、两转动两平动机构等,香港科技大学研制并出了平面 2 自由度驱动冗余并联机器人样机,如图1.7所示,通过增加一个串联分支同时增加一个驱动,构建了平面2自由度驱动冗余并联机器人,这种驱动冗余并联机器人的特点在于能克服瞬时自运动奇异而改善机构的灵巧性,同时减小了原非驱动冗余机构的理论可达工作空间。由于驱动冗余可以改善机器人力传递的一致性,既减少了工作空间内的奇异,同时
增加了机器人的承载能力和刚度,能够有效完成非冗余并联机器人的工作任务,所以,平面2自由度驱动冗余并联机器人可以完成平面上点的定位,实现平面任意轨迹。
图1.7 平面2自由度驱动冗余样机图1.8 汽车变速器
球面机器人机构是一种各转动轴线相交于一点的空间机构,由于制造相对简单经济,结构紧凑,特别适用于空间姿态变化的地方,因而球面机构在工业上得到了比较广泛的应用,如广泛使用的万向节就是最典型的球面四杆机构,大多数实用的机器人的手腕就是一个球面三杆开链机构,如图1.8所示的作为汽车变速器为一种球面5R并联机构。
这些少自由度机构的出现,大大丰富了并联机器人的机理,拓宽了这些新机犁的应用前景。但有些少自由度机构的许多结构、运动学等办面的性质尚未被认识,目前国内外现有的空间机构综台与组成原理上不成熟,仍存在许多及待解决的问题。因此分析少自由度机构的结构特性及运动特性,对少自由度机构的应用具有重要的理论意义,而且具有极高的研究价值[7]。
1.3本课题的研究内容
本课题的预期目标是首先对两自由度平移运动并联机构的自由度数进行理论上的证明和仿真验证。在此基础上对机器人工作空间进行详细分析,研究工作空间的区域,面积与机构尺寸间的关系,并根据各项性能跟机器人机构尺寸的关系,进行并联机器人结构设计。最后对其进行运动学的仿真,验证并联机器人的工作空间和运动情况。本论文的主要研究内容如下:
第1部分阐述课题的研究背景和意义,综述国内外相关领域研究情况,论述了本课题研究的主要内容。
第2部分介绍了两自由度平移运动并联机器人结构,并对它的自由度进行了理论证明和仿真验证,确定机构的执行方案及机械系统的结构方案,为具体结构设计做好准备。
第3部分在机构尺寸模型的基础上,详细地讨论了有效工作空间的形状,面积大小
与机构尺寸的关系,求出机构在运动平面内的等效杆长,并在Pro/E软件环境下,建立模型,通过计算、仿真优化机构尺寸。最后设计整体机械结构,并使用Pro/E模拟仿真。
第4部分AutoCAD软件环境下对各个机械结构进行设计,并确定该并联二自由度机构的驱动元件。
第5部通过以Ansys,对主要机构,即连杆机构强度进行分析验证。
最后指出了本高刚度两自由度平移运动并联机器人的实际应用。
2二自由度机器人系统方案设计
2.1二自由度并联机器人机构简介
二自由度并联机器人机构(如图2.1),将两电机设置在固定支架上,固定平台与作两自由度平移运动的运动平台通过两条运动支链链接并形成一个封闭的结构。可以在水平面内的X和Y轴上移动,并保证平面上的一点可以到达一定范围内(200×180/长×宽)的任何一个位置。该机构中有两根杆是平行四边形杆,用以保证平面的运动形式。
图2.1 二自由度并联机器人机构结构简图
2.2执行机构方案设计及分析
移动架的主体部分是由主动连杆和中间连杆组成的。主动连杆有两根,安装在连杆安装座上。一侧的主动连杆是一个平行四边形机构,用以保证运动的准确性。主动连杆由电机驱动。
系统的主体部分是一个二自由度的类五杆机构,由于其特殊的结构,它具有以下特点:
1.根据结构布局特点,四根连杆近似成对称分布,便于加工、装配和保证配精度要求。
2.采用平行四边形刚架结构,可有效地消除铰链间隙,提高动平台的工作性能。同时有抵抗切削颠覆力矩的能力,进而有利于改善整机结构的静、动态特性。
3.该系统结构简单,采用伺服电机驱动,具有较高的实用价值。
3二自由度机器人的结构设计与运动分析
3.1已知设计条件及参数
根据平面连杆机构的机构运动简图和已知的工作空间参数200×180mm,经过计算、分析,设定其他已知参数,如两电机间距、初始位置以及主动杆件的摆角范围等,求解连杆长度。
3.1.1连杆机构自由度计算
图3.1 连杆机构结构简图
类五杆并联连杆机构的结构简图如图3.1所示,工作机构位于中间三角形部分,为满足工作条件,需要L1,L4两个杆件主动运动,即可控制工作机构在所需空间运动。
由图3-1可知,本机构包括8个活动构件,11个转动副,由自由度的计算公式F=3n-(2Pl+Ph)可知,整体自由度为F=3×8-2×11=2。机构整体自由度为2,符合要求。
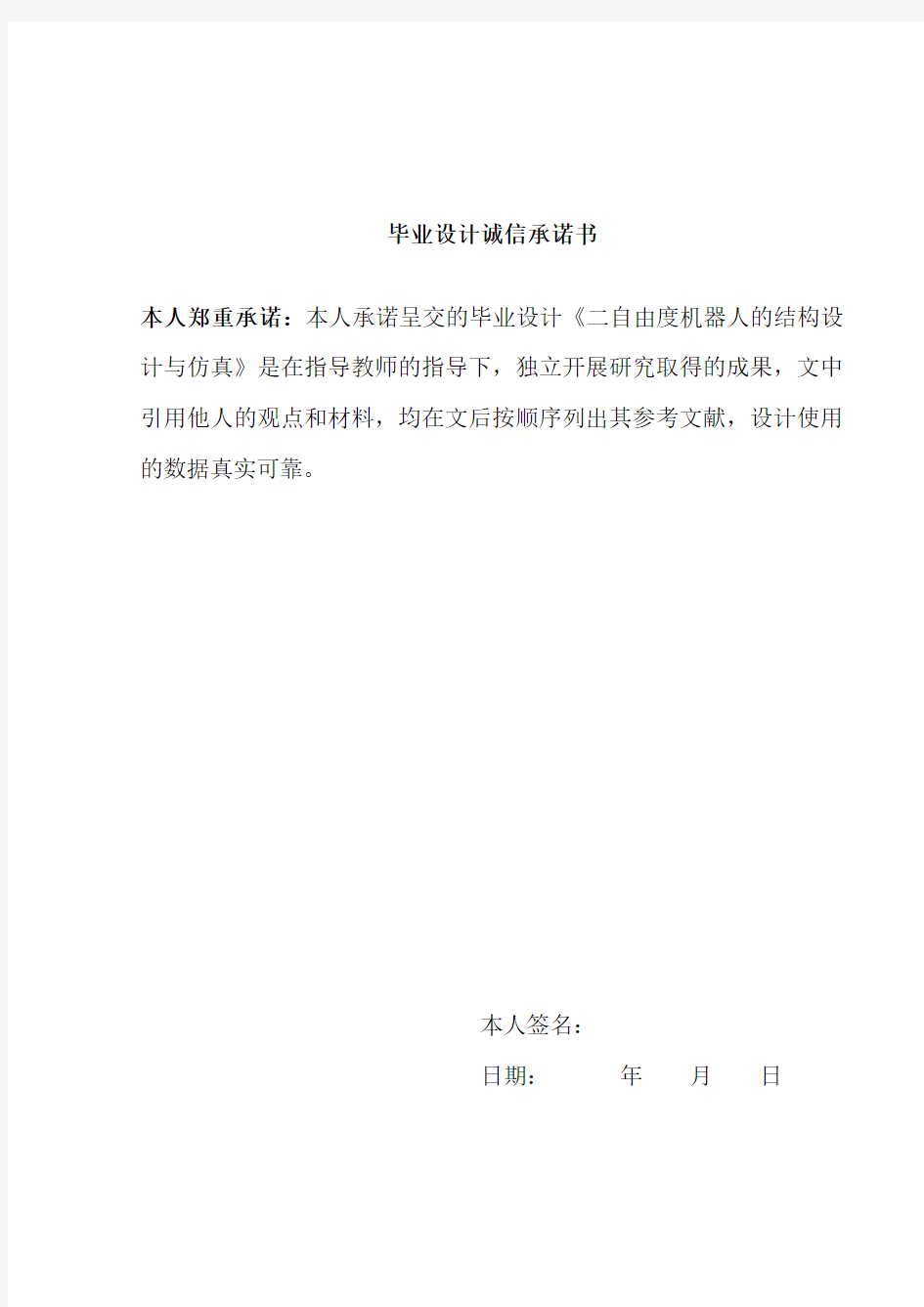
3.1.2五杆所能达到的位置计算
选取图3.2所示五连杆为模型。已知五杆杆长AB、BC、CD、DE、EA分别为L1、L2、L3、L4、L5在五连杆运动过程中,欲求出点C的运动轨迹域,需先找出点C 的几个极值位置的点,分析可知点C可达到的距固定铰支点A的最远距离为以点A为圆心以l1+ l2为半径的圆内,同样可达到的距铰支点E的最远距离为以E点为圆心,以l3+ l4为半径的圆内,而点C可达到的距固定铰支点A的最近距离为以点A 为圆心以l1?l2为半径的圆内区域,同样可达到的距铰支点E的最近距离为以E点为圆心,以l3?l4为
半径的圆内,如图3.2所示,现令
121
221
334
434 r l l r l l r l l r l l ?=-?
=+?
?
=-?
?=+?
根据上述原理,选定工作空间为200×
180mm2,对4杆进行研究,L1的工作
空间是半径为L1的圆域(设为圆1),
L2的工作空间在以半径L1+L2为半径
的圆2和圆1间,L3的工作空间是半径
为L3的圆域(设为圆3),L4的工作空
间在以半径L3+L4为半径的圆4和圆3
间。由于三角形连接中的工作空间已知,
又机构做平动,由上述约束条件加上实图3.2 类五杆机构简图
际情况的附加条件可得到一系列的驱动尺寸,最后得到从动尺寸L1、L2和H(矩形工作空间下边线与水平轴L5的垂直距离。作图过程中,需要考虑杆会干涉的点)。
作图步骤:
建立200×180mm2的矩形ABCD,使AB=CD=180mm,考虑到工作面是个三角形,估ABCD向右平移25mm得到L2端点的工作空间。
以O为端点建立水平轴,以O为圆心,以L1和L2为(目前均未知)半径画同心圆,其中圆2过BC中点。L2端点的工作空间就在圆1和圆2间。同理在水平轴上取一点为圆心做半径为L3,L4的同心圆,使圆4距AB边20mm。
在上述约束条件下,驱动L1、L2以及AD与水平轴的垂直距离H有了取值方向,考虑到实际情况中,杆间角度不宜过小,甚至干涉。做两处调整:使约束L2端点的工作空间与圆1有一定距离,从而避免L1和L2干涉,考虑到L3和L4的平行杆间比L1和L2更容易干涉,使整体工作空间往左偏移中线20mm。
通过上述尺寸预算,再经过Pro/E的模拟,进行尺寸的确定、验证、排除奇异点等。最后确定各值如图3-3。
由图3.3可知,L1=243mm,L2=237mm,L3=175mm,L4=195mm,L5=690mm。
智能四足机器人结构设计
智能四足机器人结构设计 摘要 对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器人将作为家庭的一员进入我们的生活,与我们每天朝夕相处。可现在普遍存在人们心中的疑问是:将来机器人将以何种身份进入我们的生活,是玩伴还是佣人,智能步行机器人的设计就是为了将来机器人能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。 本设计采用关节型结构,成功地设计了智能步行机器人的本体结构。本机器人具有前后行、平地侧行等基本行走功能。另外机器人头部还装有CD摄影机,胸腔内部可装备内置电源和智能设备。本设计参考了狗的结构组成,使得机器人结构尽量与狗的本体结构相似,尤其在长度配比方面。本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。 关键词:智能四足机器人;结构设计;谐波传动
Intelligent Four-Foot Robot Frame Design Abstract For our future life,everyone had different ideas,but most people believe that,in future society,the robot as a family into our lives,and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot into our lives,playmates or servants,the design of intelligent walking robot is to the future robot can enter our Chinese people's family lives,for our happy family life. The design of a joint structure,the successful design of intelligent walking robot,the body structure. The robot has before and after the trip,the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head,chest internal equipment can be built-in power supply,and intelligent. The reference design of the structure of the robot,making the structure as the robot dog,the dog's body similar to the structure,particularly in the area ratio of length. The design of the structure is more complicated,the large number of joints,in an effort to optimize the design,designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer,the slowdown in the programme reduction ratio,high efficiency,The ideal slowdown is a good programme. Keywords:intelligent four-foot robot ; structural design; harmonic drive
自由度机器人认知实验
六自由度串联机器人认知实验 一.实验目的 1. 了解串联机器人的机构组成; 2. 了解机器人机械系统各部分的原理及作用; 3. 认识RBT 机器人的运动特点及控制原理 4. 掌握机器人单轴运动的方法。 5. 二.实验设备和工具 1、 RBT-6T/S03S 教学机器人一台; 2、 RBT-6T/S03S 教学机器人控制系统软件一套; 3、 RBT-6T/S03S 教学机器人控制柜一台; 4、 装有运动控制卡计算机一台; 5、 机器人气动手爪一套。 三.实验原理与方法 1, RBT 教学机器人的性能指标 机器人是一种具有高度灵活性的自动化机器,是一种复杂的机电一体化设备。机器人按技术层次分为:固定程序控制机器人、示教再现机器人和智能机器人等。如图2-1所示,本实验所使用的RBT 机器人为6自由度串联关节式机器人,即机器人各连杆由旋转关节串联连接,各关节轴线相互平行或垂直。连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业。关节的传 动采用模块化结构,由锥齿轮、同步齿型带和谐波减速器等多种传动结构配合实现。机器人各关节采用伺服电机和步进电机混合驱动,并通过Windows 环境下的 图2-1 机器人结构
软件编程和运动控制卡实现对机器人的控制,使机器人能够在工作空间内任意位置精确定位。 RBT机器人技术参数如下: 2,机器人机械系统组成 机器人机械系统主要由以下几大部分组成:原动部件、传动部件、执行部件。基本机械结构连接方式为原动部件→传动部件→执行部件。机器人的传动简图如图2-2所示。 Ⅰ关节传动链主要由伺服电机、减速器构成。 Ⅱ关节传动链主要由伺服电机、减速器构成。 Ⅲ关节传动链主要由步进电机、同步带、减速器构成。 Ⅳ关节传动链主要由步进电机、减速器构成。 Ⅴ关节传动链主要由步进电机、同步带、减速器构成。
六自由度工业机器人设计
六自由度工业机器人 对于工业机器人的设计与大多数机械设计过程相同;首先要知道为什么要设计机器人机器人能实现哪些功能活动空间(有效工作范围)有多大了解基本的要求后,接下来的工作就好作了。 首先是根据基本要求确定机器人的种类,是行走的提升(举升)机械臂、还是三轴的坐标机器人、还是六轴的机器人等。选定了机器人的种类也就确定了控制方式,也就有了在有限的空间内进行设计的指导方向。 接下来的要做的就是设计任务的确定。这是一个相对复杂的过程,在实现这一复杂过程的第一步是将设计要求明确的规定下来;第二步是按照设计要求制作机械传动简图,分析简图,制定动作流程表(图),初步确定传动功率、控制流程和方式;第三步是明确设计内容,设计步骤、攻克点、设计计算书、草图绘制,材料、加工工艺、控制程序、电路图绘制;第四步是综合审核各方面的内容,确认生产。 下面我将以六轴工业机器人作为设计对象来阐明这一设计过程: 在介绍机器人设计之前我先说一下机器人的应用领域。机器人的应用领域可以说是非常广泛的,在自动化生产线上的就有很多例子,如垛码机器人、包装机器人、转线机器人;在焊接方面也有很例子,如汽车生产线上的焊接机器人等等;现在机器人的发展是非常的迅速,机器人的应用也在民用企业的各个行业得以延伸。机器人的设计人才需求也越来越大。 六轴机器人的应用范筹不同,设计形式也各不相同。现在世界上生产机器人的公司也很多,结构各有特色。在中国应用最多的如:ABB、Panasonic、FANUK、莫托曼等国外进口的机器人。 既然机器人的应用那么广泛,在我国却没有知名的生产公司。对于作为中国机械工程技术人员来说是一个值得思考的问题!有关机器人技术方面探讨太少了从业人员还不能成群体虽然在很多地方可以看到机器的论术,可是却没有真正形成普及的东西。 即然是要说设计,那我就从头一点一点的说起。力求讲的通俗简明一些,讲得不对的地方还请各位指正! 六轴机器人是多关节、多自由度的机器人,动作多,变化灵活;是一种柔性技术较高的工业机器人,应用面也最广泛。那么怎样去从头开始的设计它呢工作范围又怎样去确定动作怎样去编排呢位姿怎样去控制呢各部位的关节又是有怎么样的要求呢等等。。。。。。让我们带着众多的疑问慢慢的往下走吧! 首先我们设定:机器人是六轴多自由度的机器人,手爪夹持二氧气体保护焊标准焊枪;完成点焊、连续焊等不同要求的焊接部件,工艺要求、工艺路线变化快的自动生线上。最大伸长量:1700mm;转动270度;底座与地平线水平固定;全电机驱动。 好了,有了这样的基本要求我们就可以做初步的方案的思考了。 首先是全电机驱动的,那么我们在考虑方案的时候就不要去考虑液压和气压的各种结构了,也就是传动机构只能用齿轮齿条、连杆机构等机械机构了。 机器人是用于焊接方面的,那么我们就去考察有人工行为下的各种焊接手法和方法。这里就有一个很复杂的东西在里面,那就是焊接工艺;即然焊艺定不下来,我们就给它区分一下,在常用焊接里有单点点焊、连续断点点焊、连续平缝焊接、填角焊接、立缝焊接、仰焊、环缝焊等等。。。。。。 搞清了各种焊方法,也就明白了要实现这些复杂的动作就要有一套可行的控制方式才行;在机械没有完全设计出来之前可以不做太多的控制方案思考,有一个大概的轮廓概念就行了,待机械结构做完,各方面的驱动功率确定下来之后再做详细的程序。 焊枪是用常用的标准的焊枪,也就是说焊枪是随时可以更换下来的,也就要求我们要做到对焊枪的夹持部分进行快速锁定与松开。
人工智能原理及其应用(王万森)第3版 课后习题答案
第1章人工智能概述课后题答案 1.1什么是智能?智能包含哪几种能力? 解:智能主要是指人类的自然智能。一般认为,智能是是一种认识客观事物和运用知识解决问题的综合能力。 智能包含感知能力,记忆与思维能力,学习和自适应能力,行为能力 1.2人类有哪几种思维方式?各有什么特点? 解:人类思维方式有形象思维、抽象思维和灵感思维 形象思维也称直感思维,是一种基于形象概念,根据感性形象认识材料,对客观对象进行处理的一种思维方式。 抽象思维也称逻辑思维,是一种基于抽象概念,根据逻辑规则对信息或知识进行处理的理性思维形式。 灵感思维也称顿悟思维,是一种显意识与潜意识相互作用的思维方式。 1.3什么是人工智能?它的研究目标是什么? 解:从能力的角度讲,人工智能是指用人工的方法在机器(计算机)上实现智能;从学科的角度看,人工智能是一门研究如何构造智能机器或智能系统,使它能模拟、延伸和扩展人类智能的学科。 研究目标: 对智能行为有效解释的理论分析; 解释人类智能; 构造具有智能的人工产品; 1.4什么是图灵实验?图灵实验说明了什么? 解:图灵实验可描述如下,该实验的参加者由一位测试主持人和两个被测试对象组成。其中,两个被测试对象中一个是人,另一个是机器。测试规则为:测试主持人和每个被测试对象分别位于彼此不能看见的房间中,相互之间只能通过计算机终端进行会话。测试开始后,由测试主持人向被测试对象提出各种具有智能性的问题,但不能询问测试者的物理特征。被测试对象在回答问题时,都应尽量使测试者相信自己是“人”,而另一位是”机器”。在这个前提下,要求测试主持人区分这两个被测试对象中哪个是人,哪个是机器。如果无论如何更换测试主持人和被测试对象的人,测试主持人总能分辨出人和机器的概率都小于50%,则认为该机器具有了智能。 1.5人工智能的发展经历了哪几个阶段? 解:孕育期,形成期,知识应用期,从学派分立走向综合,智能科学技术学科的兴起
工业机器人结构设计
1绪论 1.1工业机器人概述 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力。从某种意义上说它也是机器进化过程的产物,它是工业以及非工业领域的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。工业机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全
生产,尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,由它代替人进行正常的工作,意义更为重大。因此,工业机械手在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的应用。工业机械手的结构形式开始比较简单专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的应用。 1.2工业机器人的组成和分类 1.2.1工业机器人的组成 机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等组成。各系统相互之间的关系如方框图1.1所示。 图1.1机器人组成系统
多自由度机械手课程设计
机电一体化系统设计课程设计 设计题目: 内装: 1. 设计说明书 2. 装配图 3. 控制电路原理图 4. ……. 专业: 姓名: 学号: 指导教师: 完成日期: 成绩: 福建农林大学机电工程学院
机电一体化系统设计课程设计说明书 设计题目: 学院: 专业年级: 学号: 学生姓名: 指导教师: 年月日
一、机械手的概述 (1) 1.1 机械手的组成和分类 (1) 1.2 应用机械手的意义 (1) 二、总体方案设计 (3) 2.1 设计任务 (3) 2.2 总体方案确定 (3) 2.2.1机械手基本形式的选择 (3) 2.2.2机械手的主要部件及运动 (3) 2.2.3驱动机构的选择 (4) 三、机械系统设计 (5) 3.1机械手手部的设计计算 (5) 3.1.1手部设计基本要求 (5) 3.1.3机械手手抓的设计计算 (5) 3.1.4.机械手手抓夹持精度的分析计算 (8) 3.1.5弹簧的设计计算 (9) 3.2腕部的设计计算 (11) 3.2.1 腕部设计的基本要求 (11) 3.2.3 腕部结构和驱动机构的选择 (12) 3.2.4 腕部的设计计算 (12) 3.3臂部的设计及有关计算 (15) 3.3.1 臂部设计的基本要求 (15) 3.3.2 手臂的典型机构以及结构的选择 (16) 3.3.3 液压缸工作压力和结构的确定 (18) 3.4机身的设计计算 (19) 3.4.1 机身的整体设计 (19) 3.4.2 机身回转机构的设计计算 (20) 3.4.3 机身升降机构的计算 (22) 3.4.4 轴承的选择分析 (25) 四、控制系统硬件电路设计 (26) 4.1可编程序控器的简介 (26) 4.2 PLC的结构,种类和分类 (26) 4.3 FX2n系列三菱PLC特点 (30) 4.4 接近开关传感器 (28) 4.5 I/O接口简介 (29) 4.6 行程开关的介绍 (30) 4.6.1 行程开关的概念 (30) 4.6.2 行程开关的作用及原理 (30) 4.7电路的总体设计 (30) 4.7.1回路的设计 (30) 4.7.2 系统输入/输出分布表 (31) 4.7.3机械手的程序设计 (33) 4.7.4 步进电机的运行控制 (33) 五、参考文献 (34)
四足机器人方案设计书
浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书
“四足机器人”设计理论方案 自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。仿照生物的各种功能而发明的各种机器人越来越多。作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。 所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。 一.装置的原理方案构思和拟定: 随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。特别是它可以替代人类完成在一些危险领域里完成工作。 科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。 为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务: 1. 自动寻找地上的目标物。 2. 用机械手拾起地上的目标物。 3.把目标物放入回收箱中。 4. 能爬斜坡。 图一 如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目
标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。 二.原理方案的实现和传动方案的设计: 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 图二 图三 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 任务的实现主要是利用单片机来控制机器人的四条腿以及几个传感器的共同工作,并通过它们的协调工作来完成的。如图一中所示,让机器人爬过了斜坡之后,就先进行扫描,如果发现有目标出现在它的视野之内,它就会寻着目标前进。如果没有发现目标,机器人会原地转弯并搜寻在它视野之外的目标。由于目标物有可能正好被障碍物遮住,此时我们会设计相应的程序告诉机器人现在先向右行走一定的距离再进行扫描。又由于尽管已经扫描到了目标物,当机器人走向
两自由度串联机器人分析与设计
机器人技术基础 三级项目报告 设计题目:两自由度串联机器人分析与设计指导教师:赵永杰 学生姓名:citycars 学号:09128888 邮箱:citycars@https://www.360docs.net/doc/905881281.html, 院系:机械电子工程系 汕头大学 机械电子工程系 2012年6月17日
目录 1.前言 (3) 2.运动学模型 (4) 3.机器人的位置及速度分析 (5) 3.1建立机器人位置输入输出方程 (5) 3.2建立机器人的速度关系及推导出雅可比矩阵 (5) 3.3机器人的位置反解 (5) 3.4机器人的速度反解 (7) 4.机器人的速度各项同性分析及设计 (8) 4.1速度各项同性分析 (8) 4.2速度各向同性设计求解 (10) 4.3求解及分析 (10) 4.4综合分析 (12) 5.结语 (13) 6附录 (13) 附录1:位置反解程序 (14) 附录2:速度反解程序 (15) 附录3:速度各向同性程序 (15)
两自由度串联机器人分析与设计 【摘要】通过建立两自由度串联机器人位置输入输出方程,建立两自由度串联机器人的速度关系,推导出雅可比矩阵,分析两自由度串联机器人的速度各向同性的条件,设计出一各向同性的构型。 关键词位置方程速度关系雅可比矩阵各向同性 1.前言 随着现代科学技术的迅猛发展,特别是由于微电子技术、电子计算机技术的迅猛发展,机器人更加广泛地应用于各个领域。工业机器人靠自身动力控制能力来实际各种功能,大都用于简单、重复、繁重的工作,如上、下料,搬运等,以及工作环境恶劣的场所,如喷漆、焊接、清砂和清理核废料等。本课程设计旨在通过工业机器人的一个小分支-----两自由度串联机器人,其输入输出方程、雅可比等的分析,以及对于速度各向同性的分析和设计,对工业机器人有初步的了解,为以后从事工业机器人相关工作奠定基础。
工业机器人_三自由度直角坐标工业机器人设计讲解
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级 学生姓名学号 指导教师祝尚臻职称讲师 起止日期:2012年1 月2 日起——至2012 年1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名 学号 指导教师职称讲师 课程设计进行地点:F430 任务下达时间:2011年12月31日 起止日期:2012 年1 月2日起——至2012 年1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 2011-12-30 - III -
四足机器人行走运动平台结构设计【开题报告】v6.0
附件 B: 毕业设计(论文)开题报告 1、课题的目的及意义 1.1课题研究背景目前,机器人的移动主要是轮式、履带式、步行、爬行、蠕动等。然而,地球上大多数的地面都是崎岖的,不能为传统的轮式或履带式到达,而自然界的很多动物却可以在这些地面行走自如、跨越障碍。它们经历了自然界数百万年间的选择,已经进化出适应各种环境的生理特征,给了研究人员很大的启发。步行是大多哺乳动物的移动方式,对环境有很强的适应性,可以灵活的进入相对狭小的空间,可以自由跨越障碍、上下台阶等等。以此,研究步行机器人有着较强的实际意义。现在的步行机器人的足数分别为单足、二足、四足、六足等等。足的数目多时,机器人比较适合重载和慢速运动;二足或者四足机构的机构相对简单,更加灵活。与二足相比,四足机器人的承载能力强、稳定性能更好,在抢险救灾、探险、娱乐及军事等多个领域有很好的应用前景,其研究工作也备受重视[1]。 2005 年,Boston Dynamics 公司首次公开了其历经十余载研究而成的仿生四足机器人Big Dog[2],在互联网上引起了全球公众的热议。Big Dog 灵活的机动性、强大的抗干扰能力以及优异的环境适应能力成为当今各国四足机器人研究的典型代表。尽管如此,从生物进化的角度来说,四足动物的体型结构和运动方式产生了以载重-适应性和高速-灵活性两大功能异化的分支[3]。Big Dog 则是环境适应能力和运动稳定性方面世界最高水平,然而,对高速运动方面的四足机器人却鲜见研究。高速运动的哺乳动物(尤其是猎豹)以独特的骨骼结构、步态特征、高效的能量转化效率成了仿生四足机器人高速灵活性研究的新方向。在DARPA 的M3 计划支持下4,Boston Dynamics 公司和MIT 仿生机器人实验室均进行了仿猎豹式机器人的研究,并推出了两款样机。尤其Boston Dynamics 公司的机器人还一举打破了足式机器人奔跑的纪录,达46km/h,使仿猎豹机器人成为新的研究热点。 1.2四足机器人研究现状 1.2.1国外研究现状 早在1899 年,Muybridge 最早借助影像设备,进行了有关家猫、狗、骆驼和马等动物的高速运动研究。然而之后的一个世纪人们对四足机器人的研究都仅仅停留在静稳定步态行走的水平上。从早期的GE 四足电控步行车[5](图1.1)到具有脊柱环节的BISAM 机器人[6](图1.2),这些机器人在任
工业机器人毕业设计
工业机器人 摘要 在当今大规模制造业中,企业为提高生产率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上重要的成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动程度极大的工作,工作方式一般采取示教在线的方式。 本文将设计一台圆柱坐标型的工业机器人,用于给冲压设备运送物料。首先,本文将设计机器人的大臂、小臂、底座和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台:在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、以及控制元件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。
目录 摘要 1绪论 (1) 1.1 工业机器人研究的目的和意义 (1) 1.2 工业机器人在国内外的发展现状与趋势…………………….. 1.3 工业机器人的分类 1.4 本课题研究的主要内容 2 总体方案的确定 2.1 结构设计概述 2.2 基本设计参数 2.3 工作空间的分析 2.4 驱动方式 2.5 传动方式确定 3 搬运机器人的结构设计 3.1 驱动和传动系统的总体结构设计 3.2 手爪驱动气缸设计计算 3.3 进给丝杠的设计计算 3.4 驱动电机的选型计算
3.5 手臂强度校核 4 搬运机器人的控制系统 4.1 机器人控制系统分类 4.2 控制系统方案分析 4.3 机器人的控制系统方案确定 4.4 PLC及运动控制单元选型 5 结论与展望 致谢
工业机器人的十一个问答
工业机器人的十一个问答 1、工业机器人定义及特点? 定义:机器人是一个在三维空间具有较多自由度的,并能实现诸多拟人动作和功能的机器:而工业机器人则是在工业生产上应用的机器人。 特点:可编程、拟人化、通用性、机电一体化 2、工业机器人有哪几个子系统组成?各自的作用是什么? 驱动系统:使机器人运行起来的传动装置。 机械结构系统:由机身手臂末端操作器三大件组成的一个多自由度的机械系统。 感受系统:由内部传感器模块和外部传感器模块组成获取内部和外部环境状态的信息。 机器人-环境交互系统:实现工业机器人与外部环境中的设备相互联系和协调的系统 人-机交互系统:是操作人员参与机器人控制与机器人进行联系的装置 控制系统:根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能 3、什么是机器人的自由度?机器人位置操作需要几个自由度?姿态操作需要几个自由度?为什么? 自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度,在三维空间中描述一个物体的位置和姿态需要六个自由度,位置操作需要3个自由度(腰肩肘)姿态操作需要3个自由度(俯仰偏航侧滚)。但是工业机器人的自由度,但是工业机器人的自由度是根据其用途而设计的可能小于6个自由度,也可能大于6个自由度。 4、工业机器人的主要技术参数有哪些? 答:自由度、重复定位精度、工作范围、最大工作速度、承载能力 5、机身和臂部的作用各是什么?在设计时应注意哪些问题? 答:机身是支承臂部的部件,一般实现升降回转和俯仰等运动。
机身设计时需要注意: 1)要有足够的刚度和稳定性 2)运动要灵活,升降运动的导套长度不宜过短,避免发生卡死现象,一般要有导向装置 3)结构布置要合理臂部是支承腕部手部和工件的静动载荷的部件,尤其高速运动时将产生较大的惯性力,引起冲击,影响定位的准确性。 设计臂部时要注意: 1)刚度要求高 2)导向性好 3)重量轻 4)运动要平稳,定位精度要高。 其它传动系统应尽量简短以提高传动精度和效率;各部件布置要合理,操作维护要方便;特殊情况特殊考虑,在高温环境中应考虑热辐射的影响腐蚀性环境中应考虑防腐蚀问题。危险环境应考虑防暴问题 6、手腕上的自由度主要起什么作用?如果要求手部能处于空间任意方向则手腕应具有什么样的自由度? 手腕上的自由度主要是实现手部所期望的姿态。为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X Y Z的转动。即具有翻转俯仰和偏转三个自由度 7、手部的作用和特点 机器人手部的作用:工业机器人的手部也叫末端操作器是用来握持工件或工具的部件 特点: 1)手部是一个独立的部件 2)手部是工业机器人的末端操作器。不一定与人的手部结构相同。可以具有手指也可以不具有手指:可以有手爪也可以是专用工具
四足机器人方案设计书
大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书
“四足机器人”设计理论方案 自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。仿照生物的各种功能而发明的各种机器人越来越多。作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。 所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。 一.装置的原理方案构思和拟定: 随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。特别是它可以替代人类完成在一些危险领域里完成工作。 科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。 为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务: 1. 自动寻找地上的目标物。 2. 用机械手拾起地上的目标物。 3.把目标物放入回收箱中。 4. 能爬斜坡。 图一 如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目
标物体,当它发现目标出现在它的感应围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。 二.原理方案的实现和传动方案的设计: 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 图二 图三 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 任务的实现主要是利用单片机来控制机器人的四条腿以及几个传感器的共同工作,并通过它们的协调工作来完成的。如图一中所示,让机器人爬过了斜坡之后,就先进行扫描,如果发现有目标出现在它的视野之,它就会寻着目标前进。如果没有发现目标,机器人会原地转弯并搜寻在它视野之外的目标。由于目标物
二自由度搬运机器人指标
题目名称二自由度搬运机器人结构设计 学生姓名蒋宁学号2011011606 所在系部机电工程系专业机械工程及自动化 第一指导教师王扬威教师号70206037 1.内容及要求: 二自由度搬运机器人具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。 随着自动化数控加工机床的发展,搬运机器人已成为提高劳动生产率的重要装备,二自由度搬运机器人的研制,将为加工中心提供一种快速、高效、运动平稳的上下料装置。 具体研究内容及要求包括: 1. 查找相关文献,分析上下料搬运机器人的研究现状和发展趋势。 2. 设计二自由度搬运机器人的机械结构,对其进行运动分析,并根据设计要求选用元器件和校核结构件强度。 3. 设计机械手的腕部结构,并进行运动分析。 2.主要技术指标: 1. 搬运机器人z轴行程1200mm,y轴行程1500mm。 2. 搬运机器人负载1t。 3. 最大运行速度300mm/s。 3.参考文献:《参考文献规范要求》 1.陶湘厅, 袁锐波, 罗璟. 气动机械手的应用现状及发展前景. 机床与液压[J], 2007, 35(18): 226~228. 2.赵碧, 巴鹏, 徐英凤. 气动上下料机械手手部结构的设计与分析[J]. 沈阳理工大学学报, 2006, 25(6): 58~60. 3.贺东坤, 田明. 气动通用上下料机械手结构设计[J]. 长春大学学报, 2012, 22(10): 1171~1173, 1180. 4.曹海燕, 周一届, 范增良, 欧阳焕. 上下料机械手柔性手腕的设计及位置误差分析[J]. 江南大学学报, 2012,11(1): 56~60. 5.王战中, 张俊, 季红艳, 赵赛, 臧丽超. 自动上下料机械手运动学分析及仿真. 机械设计与制造, 2012,(5):244~24 6. 6.刘金, 周志雄, 黄向明, 周德旺. 一种微细零件上下料机械手的设计与仿真. 计算机仿真, 2010, 27(2): 166~169,179. 4.毕业设计进度、任务安排: 2014.12.30 ~ 2015.02.24 完成文献查找,分析搬运机器人的研究现状和发展趋势; 2015.02.25 ~ 2015.03.30 完成二自由度搬运机器人的机械结构设计; 2015.03.31 ~ 2015.04.20 完成二自由度搬运机器人的运动分析和元器件选型,完成外文资料翻译工作; 2015.04.21 ~ 2015.05.25 完成机械手腕部结构设计,完成相关机械图,完成毕业设计报告,做好毕业答辩准备工作; 2015.05.26 ~ 2015.06.08 论文评审、答辩。
工业机器人的基本工作原理,工业机器人结构系统
工业机器人的基本工作原理,工业机器人结构系统 机器人是最典型的机电一体化数字化装备,技术附加值高,应用范围广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起越来越重要的作用。从20世纪下半叶起,世界机器人产业一直保持着稳步增长的良好势头。根据发达国家产业发展与升级的历程和工业机器人产业化发展趋势,到2015年中国机器人市场的容量约达十几万台套。 1工业机器人的基本工作原理 工业机器人是一种生产装备,其基本功能是提供作业所须的运动和动力.其基本工作原理是通过操作机上各运动构件的运动.自动地实现手部作业的动作功能及技术要求。因此在基本功能及基本工作原理上,工业机器人与机床有相同之处:二者的末端执行器都有位置变化要求,而且都是通过坐标运动来实现末端执行器的位置变化要求。当然机器人也有其独特的要求,是按关节形式运动为主,同时机器人的灵活性要求很高,其刚度、精度要求相对较低。 2工业机器人结构系统 2.1工业机器人构造 从功能角度分析可将机器人分解成四个部分:操作机、末端执行器、传感系统、控制器。操作机:是由机座、手臂和手腕、传动机构、驱动系统等组成.其功能是使手腕具有某种工作空间,并调整手腕使末端执行器实现作业任务要求的动作。末端执行器:也叫工业机器人的手部,它是安装在工业机器人手腕上直接抓握工件或执行作业的部件。感器系统:是指要机器人与人一样有效的完成工作。必须对外界状况进行判断的感觉功能。与机器人控制最紧密相关的是触觉。视觉适合于检测对象是否存在,检测其大概的位置、姿势等状态。相比之下,触觉协助视觉.能够检测出对象更细微的状态。控制器:机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。主要是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点。在机器人中采
7自由度工业机器人机械结构毕业设计
摘要 7 自由度工业机器人以工作范围大、动作灵活、结构紧凑、能抓取靠近机座的物体等特点备受设计者和使用者的青睐。由于有一个冗余自由度,很容易在确保最佳焊接姿势的同时,避免工件以及夹具对机器人工作臂的干扰。 本论文首先根据机器人持重3kg、工作范围1434mm、本体重量150kg,确立机器人为S腰部回转、L小臂摆动、E大臂回转、U臂部俯仰、R腕部扭转、B 腕部俯仰、T腕部回转的7自由度关节型弧焊机器人的总体结构;分析机器人的各个关节在转动惯量、角速度、加速度等技术指标下的工作状况,确定7个关节都采用交流电机驱动、机器人手臂专用减速器传动,同时B、T腕部关节还用到同步带传动。通过计算各关节所需电机的功率和转矩、减速器的减速比、同步带的要求并选型;用UG NX6.0画出机器人的各关节三维仿真模型,并装配成型。 本课题研究具有广泛的实际意义和应用前景。设计的7自由度工业机器人为后续的机器人动力学分析和运动控制提供了参考依据,并可以做进一步的研发。 关键词:7自由度,工业机器人,机械结构
Abstract 7 dof industrial robots with large scope of work, flexible, compact structure, can grab the object near the base are famous among so much designers and users. Because there is a redundant freedom, it is easy to ensure the best welding position at the same time, avoid workpiece and fixture work on the robot arm interference. In this thesis, according to the robot puts up 3kg, the scope of work is 1434mm, body weight is 150kg,establish 7 dof joint structure of arc-welding robot including S waist, L arm swing, E arm rotation, U pitching arm, R wrist turn, B wrist pitch, T wrist rotation. Analysis of the various robot joints in moment of inertia, angular velocity, acceleration and other technical indicators of the work under the conditions identified seven joints driven by AC motor, the robot arm dedicated reducer drive, while B, T wrist joint is also used in synchronous belt drive. Required by calculating the joint motor power and torque, reduction ratio reducer, belt requirements and selection; robot with UG NX6.0 draw three-dimensional simulation model of each joint, and assembly molding. This research has extensive practical significance and application prospect. 7 dof industrial robots designed for the follow-up dynamics analysis and motion control and provide a reference, and can do further research and development. Key words: 7 dof, industrial robot, mechanical structure