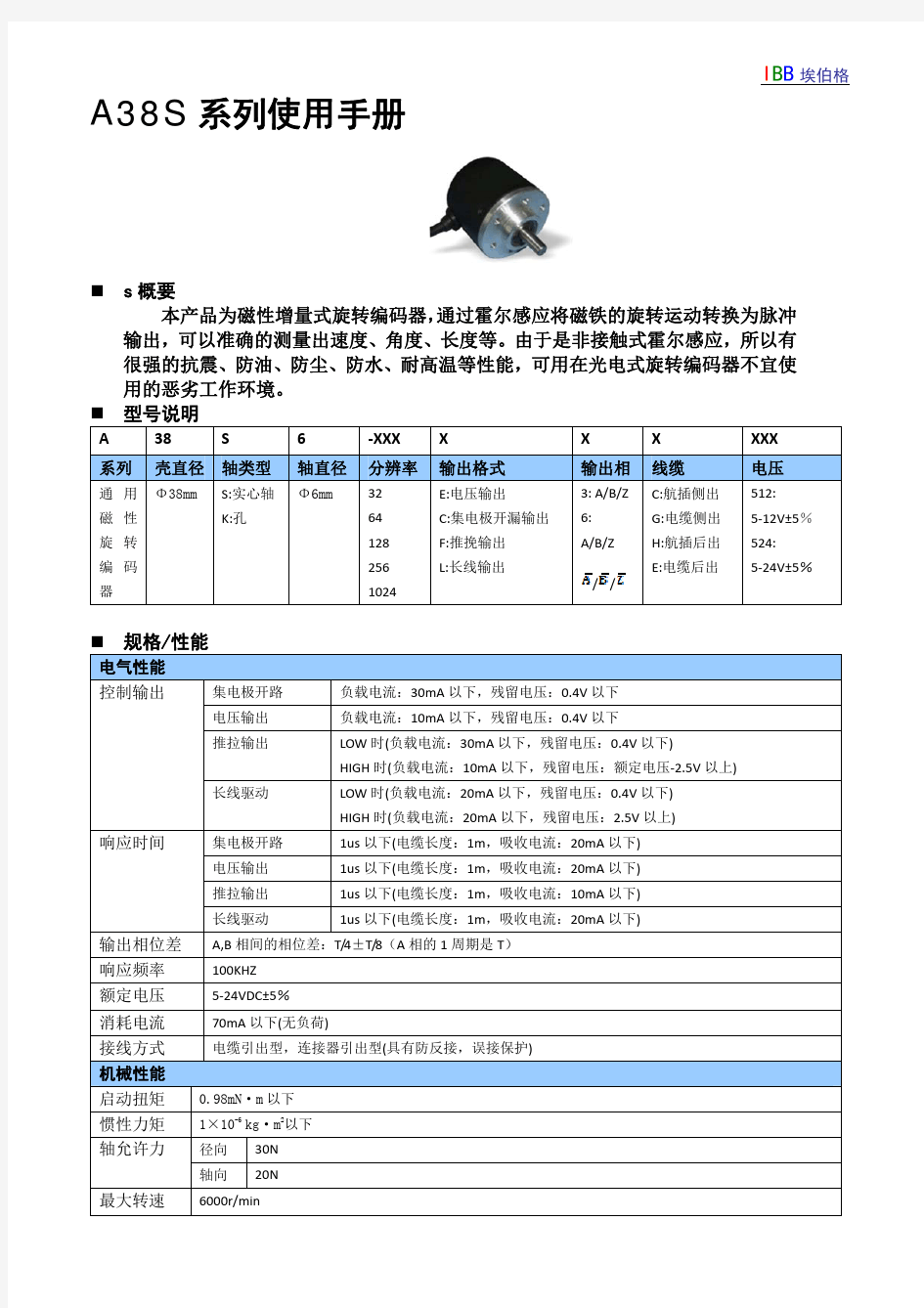
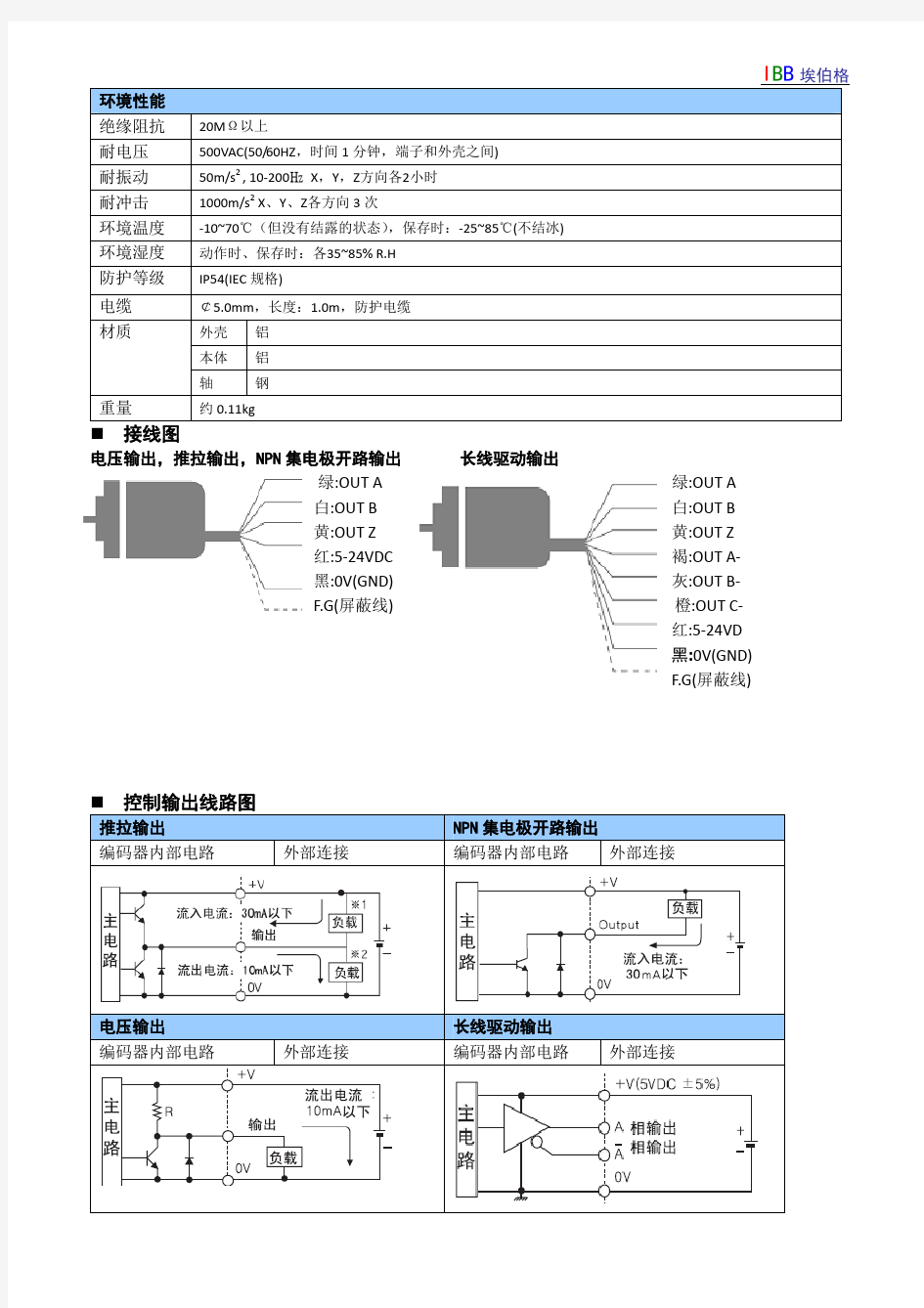
A38S磁旋转编码器说明书
磁旋转编码器常见问题
磁旋转编码器常见问题 常见问题:磁旋转编码器I C 一般性问题 Q1:芯片如果不能按预期工作,我需要进行哪些测试才能找出原因? Q2:可以在不编程的情况下使用旋转编码器芯片吗? Q3:如何知道上电之后角度数据何时有效? Q4:启动时间是否会随温度而改变? Q5:不同类型的输出可用于哪些应用? Q6:我可以利用数字输出驱动大于4m A的电流,例如驱动一个10m A的L E D吗?Q7:为什么已存在下拉电阻还必须将P R O G连接到V S S? Q8:对准模式下限制数值32是什么意思? Q9:可以得到的最佳精度是多少? Q10:可以得到优于0.1度的精度吗? Q11地利微电子可以校准芯片以实现最佳的精度吗? Q12:数据资料中显示的误差曲线对于所有产品都是一样的吗? Q13:编码器的重复性是指什么? Q14:重复性怎样随着温度改变? Q15:C S n引脚可以永久地连接到V S S吗? Q16:角度数据采样与C S n是同步的吗? Q17:奥地利微电子可以提供预先编程的定制化编码器吗? Q18:编码器可承受的振动水平怎样? Q19:怎样降低A S5040/43/45的功耗? 磁铁相关问题 Q20:推荐的磁铁水平偏离容差是多少? Q21:如果不能将磁铁对准在推荐的容差内,会发生什么呢? Q22:我可以将编码器I C安装在环形磁铁的周围吗? Q23:怎样才能扩展磁铁的垂直间距? Q24:如果在―绿色‖(适当)范围之外使用传感器会有什么后果? Q25:哪些类型的磁铁可以和A S5035/40/43/45配合使用? Q26:在旋转轴内安装磁铁的时候需要注意什么? Q27:为什么在移除磁铁的时候不能触发C O F和L I N报警? Q28:为什么即使移除磁铁时我仍可以得到随机的角度数据? Q29:在什么磁场范围可以得到M a g I n c/-D e c、L I N和C O F报警信号? Q30:如何分辨磁铁场强过弱(或丢失)与磁铁场强过强的情况? Q31:要获得零位读数时,磁铁要处于哪一个缺省位置? Q32:磁编码器是如何做到对于外部磁场不敏感的? A S5035,A S5040,A S5045 磁旋转编码器产品系列常见问题 A S50000磁旋转编码器产品系列 常见问题 Q33:是否需要屏蔽传感器以避免外部磁场的影响? Q34:B L D C电动机的强磁场转子磁铁会对编码器造成什么影响? Q35:我可以将其它材料放置到磁铁和I C之间吗?
旋转编码器详解
增量式编码器的A.B.Z 编码器A、B、Z相及其关系
TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系? 对于这个问题的回答我们从以下几个方面说明: 编码器只有A相、B相、Z相信号的概念。 所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三 相主回路供电。 而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。 当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。 另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。 带U、V、W相的编码器,应该是伺服电机编码器 A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的 时候也能正常使用。 ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个; UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。 /#############################################################
编码器原理及常见知识问答
编码器原理及常见知识问答 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是"1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是"1”还是"0”,通过"1”和“0”的二进制编码来将采集来的物理信号转换为机器码可读取的电信号用以通讯、传输和储存。 编码器工作原理: 利用电磁感应原理将两个平面型绕组之间的相对位移转换成电信号的测量元件,用于长度测量工具。感应同步器(俗称编码器、光栅尺)分为直线式和旋转式两类。前者由定尺和滑尺组成,用于直线位移测量;后者由定子和转子组成,用于角位移测量。 1957年美国的R.W.特利普等在美国取得感应同步器的专利,原名是位置测量变压器,感应同步器是它的商品名称,初期用于雷达天线的定位和自动跟踪、导弹的导向等。在机械制造中,感应同步器常用于数字控制机床、加工中心等的定位反馈系统中和坐标测量机、镗床等的测量数字显示系统中。它对环境条件要求较低,能在有少量粉尘、油雾的环境下正常工作。定尺上的连续绕组的周期为2毫米。滑尺上有两个绕组,其周期与定尺上的相同,但相互错开1/4周期(电相位差90°)。 感应同步器的工作方式有鉴相型和鉴幅型的两种。前者是把两个相位差90°、频率和幅值相同的交流电压U1和U2分别输入滑尺上的两个绕组,按照电磁感应原理,定尺上的绕组会产生感应电势U。如滑尺相对定尺移动,则U的相位相应变化,经放大后与U1和U2比相、细分、计数,即可得出滑尺的位移量。在鉴幅型中,输入滑尺绕组的是频率、相位相同而幅值不同的交流电压,根据输入和输出电压的幅值变化,也可得出滑尺的位移量。由感应同步器和放大、整形、比相、细分、计数、显示等电子部分组成的系统称为感应同步器测量系统。它的测长精确度可达3微米/1000毫米,测角精度可达1″/360°。
AS5048A-HTSP 14位绝对式旋转编码器IC
General Description The AS5048 is an easy to use 360° angle position sensor with a 14-bit high resolution output. The maximum system accuracy is 0.05° assuming linearization and averaging is done by the external microcontroller. The IC measures the absolute position of the magnet’s rotation angle and consists of Hall sensors, analog digital converter and digital signal processing. The zero position can be programmed via SPI or I2C command. Therefore no programmer is needed anymore. This simplifies the assembly of the complete system because the zero position of the magnet does not need to be mechanically aligned. This helps developers to shorten their developing time. The sensor tolerates misalignment, air gap variations, temperature variations and as well external magnetic fields. This robustness and wide temperature range (-40°C up to +150°C) of the AS5048 makes the IC ideal for rotation angle sensing in harsh industrial and medical environments. Several AS5048 ICs can be connected in daisy chain for serial data read out. The absolute position information of the magnet is directly accessible over a PWM output and can be read out over a standard SPI or a high speed I2C interface. Version AS5048A comes with SPI and PWM Interface. Version AS5048B is configured with the I2C interface and has also a PWM output. An internal voltage regulator allows the AS5048 to operate at either 3.3 V or 5 V supplies. Key Features & Benefits ? 360° contactless angle position sensor ? Standard SPI or high speed I2C interface and PWM ? Simple programmable zero position via SPI or I2C command ? No programmer needed ? 14-bit full scale resolution 0.0219°/LSB ? Angle accuracy 0.05°after system linearization and averaging ? Daisy chain capability ? Tolerant to air gap variations magnetic field input range: 30mT – 70mT ? -40°C to +150°C ambient temperature range ? 3.3V / 5V compliant ? 14-pin TSSOP package (5x6.4mm) Applications ? Robotic joint position detection ? Industrial motor position control ? Medical robots and fitness equipment Block Diagram
旋转编码器定位使用说明
充注小车、运载小车定位使用说明 定位原理: 旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。 PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。 目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。 根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。 使用方法: 依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。当基点信号取的不稳定或不好,就会影响整个定位过程。 旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。 旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。 定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。 一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。 还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。因此系统要运行平稳,不能有速度突变。
磁旋转编码器(圆磁栅)为铁路安全计划作出贡献
磁旋转编码器(圆磁栅)为铁路安全计划作出贡献 Sperry Rail公司的手杖式轨道裂纹扫描仪采用Renishaw关联公司RLS d.o.o开发的非接触磁编码器,帮助确定轨道裂隙的位置—这是旨在防止轨道缺陷造成撞车事故的长期预防性维护计划的一部分。采用编码器,因其具有优异的总体性能特征,包括分辨率、功耗、重量、尺寸和输入/输出配置,而且可以帮助记录可追踪数据。 Network Rail公司负责管理英国数千英里的铁路,随着铁路乘客的不断增长,该公司已开始实施一项长期预防性维护计划。 协助Network Rail公司探查并监测轨道裂隙的是总部设在英国的Sperry Rail International公司。该公司在其新型手杖式轨道裂纹扫描仪中安装了RE22磁旋转编码器,用来帮助在轨道出现故障之前就确定缺陷的准确位置,做到防患于未然。 轨道裂纹的源头 Sperry公司现场服务经理George Dodd说:“轨道裂纹通常由两个原因造成,一是生产过程中轨道存在的固有缺陷,二是过往铁路机车车辆对铁轨造成的损坏。” Dodd说,螺栓孔和其它配件也可能成为应力性裂纹的关键原因,但裂纹是如何扩散的,并没有明显的模式。它们取决于诸多因素,包括交通流量、车辆载重以及极端天气。他还说:“裂纹通常与车辆的正常运行方向形成20度角,但双向线路在两个方向都会出现裂纹。” 测试装置 测试轨道的最常用装置是一种超声工具,它可以探测轨头、轨腰、轨底存在的缺陷。步行式操作装置的标准裂纹检测方法称为A型扫描,超声反射显示在屏幕上。 使用B型扫描裂纹探测器 (BSFD) 时,接收的信号以另外一种形式显示在屏幕上,但也可以被采集并存储在一个文件中,用于日后分析和检验。 BSFD可以存储多个数据集。 Sperry装置的优势 Sperry手杖式轨道裂纹扫描仪是一种步行式检测工具,操作员推着该装置沿铁路线行进,可以A型扫描或B型扫描模式作业。 Dodd说:“我们的手杖式轨道裂纹扫描仪有一个辊子搜索装置,还有9个传感器可从预定角度将声波投射到轨道中,继而从裂纹缺陷上产生反射。” 用于轨道检测的“手杖”有各种形式,问世已经25年有余。 Sperry装置与众不同,它采用含有液体的聚亚安酯轮胎,与固定的非接触式探头集成一体。 Dodd说:“有一个‘零度’探头与轨底垂直,还有几个探头与路轨呈37度折射角,这些探头可以探测轨腰和轨底中的缺陷。” RSU轮胎沿着路轨在薄薄的一层水和防冻剂上滚动,排出所有空气,并将声波清晰地传递到轨道中,然后再传出声波。 集团系统总监Graham Dale说:“Sperry的手杖式轨道裂纹扫描仪可对轨头、轨头、轨腰和轨脚进行检测。它利用Renishaw RE22磁旋转编码器测量行程。我们以前开发的手杖式轨道裂纹扫描仪采用的是其它厂商的编码器,这是我们首次采用Renishaw的编码器。
编码器选型及故障判断
编码器选型介绍及简单故障判断 编码器元件是一种可替代炭膜电位器的新型数字式电子元件,有着良好的市场应用前景和发展空间。广泛应用于家用电器、汽车音响、通讯设备、多媒体、音响、仪器仪表设备、数控机床、医疗设备、工程机械、航空航天设备、智能控制、物联网终端设备等,具有极大推广应用的价值。 1 编码器的分类: 按产品结构分为:编码器元件和编码器组件; 按使用方式分为:旋转式和直线式; 按技术原理分为:接触式(电刷机械接触)和非接触式(含有:光学式、光电感应式、磁感应式、磁电感应式…); 按工作原理分为:增量型和绝对型。 2 部分编码器元件产品(图一)
(图一:编码器元件) 3 编码器元件工作原理 本文将对增量型编码器和绝对型编码器的工作原理和应用进行介绍。 在编码器的本体(脉冲码盘)中预先根据不同的产品要求,制作金属导通区与塑胶绝缘区,导通区与绝缘区的角度、形状大小,决定着产品最终的信号输出形式。 3.1增量型编码器: 在旋转过程中,能输出二组或二组以上,有周期性变化并有相位时序差的编码器 . (1) 产品特点: a) 可以360度旋转; b) 在旋转过程中,能够产生高、低电平周期性变化的输出信号,没有固定的起始点和终点; c) 能在任一位置停下或起步; d) 使用时,一般不注重停下位置的结果,只强调过程的信号变化。 (2) 产品构造:
该产品主要由轴芯、本体、支架、定位片、接触刷等组成。 (3) 输出信号: 通过旋转轴芯带动接触刷,产生通、断,输出二组或二组以上,有周期性变化并有相位时序差的脉冲信号。 a) 输出二组信号时,一般分为:A相、B相,相位间的相位差为相互延迟1/4脉冲周期,根据通断的先后顺序,判断产品的旋转方向(信号递增或递减),如图二所示: (图二:二组信号方波) b) 输出三组信号时,一般分为:A相、B相C相,通过三组信号的通断先后顺序(时间差)来判定信号的递增或递减,三组信号在导通的状态时互不相交,从而使成品的相位差相对变大。信号增减更易识别,更稳定,不易出现乱码,如图三所示:
12位可编程磁旋转编码器
AS5145/AS5145A/AS5145B 12-Bit Programmable Magnetic Rotary Encoder D a t a S h e e t 1 General Description The AS5145 is a contact less magnetic rotary encoder for accurate angular measurement over a full turn of 360 degrees. It is a system-on-chip, combining integrated Hall elements, analog front end and digital signal processing in a single device. To measure the angle, only a simple two-pole magnet, rotating over the center of the chip, is required. The magnet may be placed above or below the IC. The absolute angle measurement provides instant indication of the magnet’s angular position with a resolution of 0.0879o = 4096 positions per revolution. This digital data is available as a serial bit stream and as a PWM signal. An internal voltage regulator allows the AS5145 to operate at either 3.3V or 5V supplies. 2 Key Features Contact less high resolution rotational position encoding over a full turn of 360 degrees Two digital 12 bit absolute outputs: -Serial interface -Pulse width modulated (PWM) output Figure 1. AS5145 Automotive Rotary Encoder IC Three incremental outputs Quadrature A/B (10 or 12 bit) and Index output signal (pre-programmed versions available AS5145A for 10 bit and AS5145B for 12 bit) User programmable zero position Failure detection mode for magnet placement, monitoring, and loss of power supply Red-Yellow-Green indicators display placement of magnet in Z-axis Serial read-out of multiple interconnected AS5145 devices using Daisy Chain mode Tolerant to magnet misalignment and gap variations Wide temperature range: - 40oC to +150oC Fully automotive qualified to AEC-Q100, grade 0 Small Pb-free package: SSOP 16 (5.3mm x 6.2mm) 3 Applications The device is ideal for industrial applications like contactless rotary position sensing and robotics; automotive applications like steering wheel position sensing, transmission gearbox encoder, head light position control, torque sensing, valve position sensing and replacement of high end potentiometers. Hall Array & Front end Amplifier PWM Interface DSP OTP Register MagINCn DO CSn CLK PDIO Sin Cos Mag Ang MagDECn PWM Absolute Interface (SSI) V DD5V Incremental Interface DTEST1_A DTEST2_B LDO 3.3V V DD3V3 Mux Mode_Index AS5145
POSITAL编码器说明书
P O S I T A L编码器说明书 Prepared on 24 November 2020
POSITAL编码器资料 FRABA 编码器 德国博思特POSITAL编码器、POSITAL工业编码器、POSITAL倾角仪,POSITAL传感器、POSITAL线性传感器,POSITAL绝对值编码器、POSITAL旋转编码器等。 编码器行业领导者上海精芬德国博思特POSITAL编码器、POSITAL工业编码器、POSITAL倾角仪,POSITAL 传感器、POSITAL线性传感器,POSITAL绝对值编码器、POSITAL旋转编码器等,如需询价或详细信息,方案选型与精芬联系。德国POSITAL公司成立于1918年,致力于高端机电产品的研发及生产,是欧洲绝对值编码器产品的领跑者。该公司产品广泛应用于冶金、汽车制造、水利、物流、机械制造、木材加工、造船等行业。 以下021列举部分型号:OCD-S200G-1412-B15S-PRL、OCD-S200G-1212-B150-PRL、OCD-S200G-1212-B15S-CRW、OCD-S200G-1213-B150-CAW、OCD-S200B-1213-SA1C-CRS-150、OCD-S200G-1416-S060-PRL、OCD-S200G-1213-B15C-CAS-182、OCD-S200G-1416- S100-CAW、OCD-S200G-1212-C100-PRL、OCD-S200G-1412-B150-PRL、OCD-S100G-1212-B150-PAL、OCD-
S100G-0012-C100-PRL、OCD-S100G-1212-C10S-CRW-5m、OCD-S100G-1212-S100-PRL、OCD-S100G-1212- B15V-CAW-5m、OCD-S100G-0013-S100-PRL、OCD- S100G-1212-S10S-PRL、OCD-S100G-0016-S10S-PAL、OCD-S100B-1212-C10S-PRL、OCD-S100G-1416-C100-PRL、OCD-S100G-1213-C100-PA9、OCD-S100G-1213-C100-PAL、OCD-S100G-1212-S060-PRL-050、OCD- S100G-1212-B150-PRL、OCD-S100G-1213-C100-PRL、OCD-S100B-0016-B15S-CRW-136、OCD-S100G-1212-C100-PRL、OCD-S100G-1212-C100-CRW、OCD-S100G-1212-S060-PAL、OCD-S100B-0016-S060-PAL-135、OCD-S100G-0013-C100-PAL OCD-S100G-1213-T120-PRL、OCD-S100B-1212-S060-CRW、OCD-S100G-0016-T12C-CRW-163、OCD-S100G-1416-C10V-CAW-5m、OCD-S100G-1216-S10S-PRL、OCD-S100G-0016-T120-CRW、OCD-S100B-1212-C100-PRL、OCD-S100B-1212-B15V-CAW-5m、OCD-S100G-1212-B15S-PAL、OCD-S100B-0016-C100-CAW-5m、OCD-S100G-1212-C10S-PRL、OCD-S100B-0016-T120-CRW、OCD-S100G-1213-S10S-PRL、OCD-S100B-1213-C10S-PRL、OCD-S100G-0013-S060-PRL、OCD-S100B-0016-T120-PRL、OCD-SL00G-1213-SA1C-CRS-159、OCD-S100B-0016-B150-CRW、
旋转编码器工作方式图解
旋转编码器 旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。 编码器码盘的材料有玻璃、金属、塑料等。玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。 编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。输出类型取决于具体应用。 一:增量式旋转编码器工作原理 增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。 图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。 当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。 通过输出波形图可知每个运动周期的时序为: 我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向, 如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。 S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。
磁性编码器构成及原理
磁性编码器构成及原理 磁性编码器主要部分由磁阻传感器、磁鼓、信号处理电路组成。将磁鼓刻录成等间距的小磁极,磁极被磁化后,旋转时产生周期分布的空间漏磁场。磁传感器探头通过磁电阻效应将变化着的磁场信号转化为电阻阻值的变化,在外加电势的作用下,变化的电阻值转化成电压的变化,经过后续信号处理电路的处理,模拟的电压信号转化成计算机可以识别的数字信号,实现磁旋转编码器的编码功能。 磁鼓充磁的目的是使磁鼓上的一个个小磁极被磁化,这样在磁鼓随着电动机旋转时,磁鼓能产生周期变化的空间漏磁,作用于磁电阻之上,实现编码功能。磁鼓磁极的个数决定着编码器的分辨率,磁鼓磁极的均匀性和剩磁强弱是决定编码器结构和输出信号质量的重要参数。下图:磁鼓表面的磁极分布
磁阻传感器是磁阻敏感元件做成,磁阻器件可以分为半导体磁阻器件和强磁性磁阻器件。为了提高信号采样的灵敏度,同时考虑到差动结构对敏感元件温度特性的补偿效应,一般在充磁间距λ内,刻蚀2个位相差为丌/2的条纹,构成半桥串联网络。如下图: 同时,为了提高编码器的分辨率,可以在磁头上并列多个磁阻敏感元件,在加电压的情况下,磁阻元件通过磁鼓旋转输出相应正弦波。其原理可简单解释:磁鼓产生NS的磁场作圆周运动,磁阻元件做成的传感器随磁场变化电阻也随之变化,并感测出SinA,SinB 两个电压波形。磁阻传感器的构造如图,由8个磁阻分为两组相距1/4 NS间距。在Mr1,Mr2与Mr3,Mr4的接点处可检出Sin电压波形,同样原理在Mr1‘,Mr2‘与Mr3‘,Mr4‘的接点处可检出SinB电压波
形。 磁阻元件构成的磁阻传感器等效图 从磁阻传感器输出的两路波形 信号处理电路:SinA,SinB 信号到达信号处理电路后,为了能在cpu 取样的范围内,需对波形进行调整。首先AB相信号需先做DC电压准位调整,使AB相信号直流准位位于DSP A/D取样电压范围的中点,且振幅不超过取样电压范围,AB相信号再经过模拟滤波器及数字滤波器,将高频及谐波滤除后,通过DSP高速运算能力实时地将计算出位置和速度;另外还有一种处理方法是将SinA、SinB 信号直接通过信号处理电路转换成方波后再进DSP。后者可能软件处理起来更方便一些。
旋转编码器调整方法
四:旋转编码器的调整 增量式编码器的相位对齐方式 在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备A/B/Z 输出信号外,还具备互差120度的电子换相信号U/V/W,U/V/W各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的U/V/W电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下: 1.用一个直流电源给电机的U/V绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置. 2.用示波器观察编码器的U相信号和Z信号. 3.调整编码器转轴与电机轴的相对位置. 4.一边调整,一边观察编码器U和Z相信号跳变沿,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系。 5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。 撤掉直流电源后,验证如下: 1.用示波器观察编码器的U相信号和电机的U/V线反电势波形。 2.转动电机轴,编码器的U相信号上升沿与电机的U/V线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。 上述验证方法,也可以用作对齐方法。 需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。 有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以: 1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线; 2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形。 3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置。 4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。 由于普通增量式编码器不具备U/V/W相位信息,而Z信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而不作为本讨论的话题。 绝对式编码器的相位对齐方式 绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平,利用此电平的0和1的翻转,也可以实现编码器和电机的相位对齐,方法如下:
编码器常见问题处理
A 如果已知电机的转速是3000r/min,选择的编码器型号是E6B2-CWZ6C,那分辨率应该选择多少P/R的? 答:电机的最高应答旋转数(r/min)=(最高响应频率数/分辨率)*60 3000r/min=(100KHz/分辨率)*60 分辨率=2000P/R,只要分辨率小于2000以下都可以。 如果算出来的数值不是整数,则四舍五入取小值。 B 增量型编码器E6B2-CWZ6 C 1000P/R,人工手转,但输出为500P/R或300P/R,可能有哪些原因造成。 答:1.电源电压为DC5~24v,可能供电不足,PLC电源不够,不能支持它正常运作。2.距离超过额定传 输距离,电压会衰减,d < 2m(电压输出型)。 3.后面连接的设备不能接收如此高速的计数输入,导致 脉冲丢失。 C NPN集电极开路输出的编码器怎么接到CP1L高速计数器输入端子?
D 如何判断旋转编码器的好坏? 答:①接PLC查看脉冲个数或码值是否正确; ②接示波器查看波形; ③用万用表电压档测试输出是否正常。 编码器为NPN输出时: 测量电源正极和信号输出线, 晶体管置ON时输出电压接近供电电压, 晶体管置OFF时输出电压接近0V。 编码器为PNP输出时: 测量电源负极和信号输出线, 晶体管置ON时输出电压接近供电电压, 晶体管置OFF时输出电压接近0V E 增量型编码器接到计数器上,为何会出现计数误差的情况? 答:以下情况可能造成计数误差: ①现场环境有抖动; ②编码器和电机轴之间有松动,没有固定紧; ③旋转速度过快,超出编码器的最高响应频率; ④编码器的脉冲输出频率大于计数器输入脉冲最高频率。 F 旋转编码器中最高响应频率和允许最高转速的定义是什么? 答:最高响应频率就是编码器电气上最大能响应的频率数,如果在高于这个参数的频率下使用,则编码器内部电路会无法响应,会导致编码器漏脉冲的现象发生,最高响应频率单位为KHz。 允许最高转速就是指编码器的轴机械运动时,所能承受的最高转速,高于这个参数,则编码器的轴可能会损坏。允许最高转速单位为r/min。 注意:实际使用时,这两项参数都需考虑,必须都小于这两相参数规定的值,才能正常使用。
磁式编码器 与 光电编码器 的区别
磁式编码器与光电编码器的区别 Avtron从事编码器研发与生产50年,是世界上最主要的型重载编码器制造商之一,产品广泛应用于冶金/风电/石油/起重/港口/造纸/矿山等重型机械行业。 Avtron的编码器采用了两种不同的传感技术来产生信号:光电式和磁阻式。Avtron的两种传感技术的编码器在众多环境恶劣、要求苛刻的变速传动与控制应用中,经过了成千上万的安装及使用验证,您可以完全信赖我们。并根据您对价格和使用环境的需求来选择最适合的编码器。 光电传感技术:采用光电原理产生信号。其扫描原理为:LED灯发出光线,经过透镜聚焦成光线,光线被一个旋转的刻有光栅的码盘切割,在码盘的另一端被光敏电池接收并输出信号。原理图如下图: 光电码盘的材质通常为玻璃,高分子材料,金属,实际应用中,光电码盘与光敏电阻的距离很小,通常在10μm的数量级,因而,任何轴向窜动都会损坏编码器,另外,采用光电传感技术的编码器,不耐振动,不耐污染,
对频繁变温、振动,以及长期潮湿的、污染的工作环境中适应力较差。光电扫描技术是重载编码器发展的瓶颈。 Avtron的光电传感技术:采用抗振防碎型光码盘,并结合Avtron的专利宽距技术,使传感器与光码盘的间隙是一般编码器的8倍大,从而避免了由于振动撞击导致的码盘或传感器的损坏。 Avtron的磁式传感技术:采用磁阻检测原理,扫描系统由磁环及传感器组成,磁环有多个磁极紧密排列而成,N-S极有磁力线,磁环旁传感器可以检测到磁力线的变化,当磁环旋转时,磁力线发生变化,传感器根据磁力线变化(磁力线角度方向)输出信号。
Avtron的宽距技术科使转子与传感器间的距离是通常编码器的2-4倍大(1.2mm-2.2mm),避免了因对中不准、电机轴跳和轴承移动等原因对传感器造成的损坏。原理图如下图: 因为磁力线可以穿透污染,因而编码器内部不受灰尘、油污和水汽的影响,传感器与码盘的距离最大可达3mm,码盘及其坚固,所有电子部件灌胶密封,因而不怕振动冲击,适合于苛刻工况下的应用。AVTRON模块化的编码器,例如SMARTachII系列和THIN-LINE II超薄系列,因为没有轴承,防止轴电流,更耐冲击振动,设计寿命超长,平均两次故障时间(MTBF)为4,500,000 小时,无争议质保3年,可保证 您的设备24X365的运行!
编码器的常见问题解答一
编码器的常见问题解答 一、问:增量旋转编码器选型有哪些注意事项? 应注意四方面的参数: 1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。 2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。 3.电气接口,编码器输出方式常见有推拉输出(f型htl格式),电压输出(e),集电极开路(c,常见c为npn型管输出,c2为pnp型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。 4,工作电压 二、问:请教如何使用增量编码器? 1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。 2,增量型编码器通常有三路信号输出(差分有六路信号):ab和z,一般采用ttl电平,a脉冲在前,b脉冲在后,ab脉冲相差90度,每圈发出一个z脉冲,可作为参考机械零位。一般利用a超前b或b超前a进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,a超前b为90°,反之逆时针旋转为反转b超前a为90°。也有不相同的,要看产品说明。 3,使用plc采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。 4,建议b脉冲做顺向(前向)脉冲,a脉冲做逆向(后向)脉冲,z原点零位脉冲。 5,在电子装置中设立计数栈。 三、关于户外使用或恶劣环境下使用 有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。
我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。 不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。 四、从接近开关、光电开关到旋转编码器: 工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。可是,随着工控的不断发展,又有了新的要求,这样,选用旋转编码器的应用优点就突出了: 信息化:除了定位,控制室还可知道其具体位置; 柔性化:定位可以在控制室柔性调整; 现场安装的方便和安全、长寿:拳头大小的一个旋转编码器,可以测量从几个μ到几十、几百米的距离,n个工位,只要解决一个旋转编码器的安全安装问题,可以避免诸多接近开关、光电开关在现场机械安装麻烦,容易被撞坏和遭高温、水气困扰等问题。由于是光电码盘,无机械损耗,只要安装位置准确,其使用寿命往往很长。 多功能化:除了定位,还可以远传当前位置,换算运动速度,对于变频器,步进电机等的应用尤为重要。 经济化:对于多个控制工位,只需一个旋转编码器的成本,以及更主要的安装、维护、损耗成本降低,使用寿命增长,其经济化逐渐突显出来。 如上所述优点,旋转编码器已经越来越广泛地被应用于各种工控场合。 五、关于电源供应及编码器和plc连接: 一般编码器的工作电源有三种:5vdc、5-13 vdc或11-26vdc。如果你买的编码器用的是11-26vdc 的,就可以用plc的24v电源,需注意的是: 1.编码器的耗电流,在plc的电源功率范围内。 2.编码器如是并行输出,连接plc的i/o点,需了*的信号电平是推拉式(或称推挽式)输出还是集电极开路输出,如是集电极开路输出的,有n型和p型两种,需与plc的i/o极性相同。如是推拉式输出则连接没有什么问题。