旋转编码开关(RotaryEncoderswitch)使用说明及程序
旋转编码开关(Rotary Encoder switch)-使用说明及程序
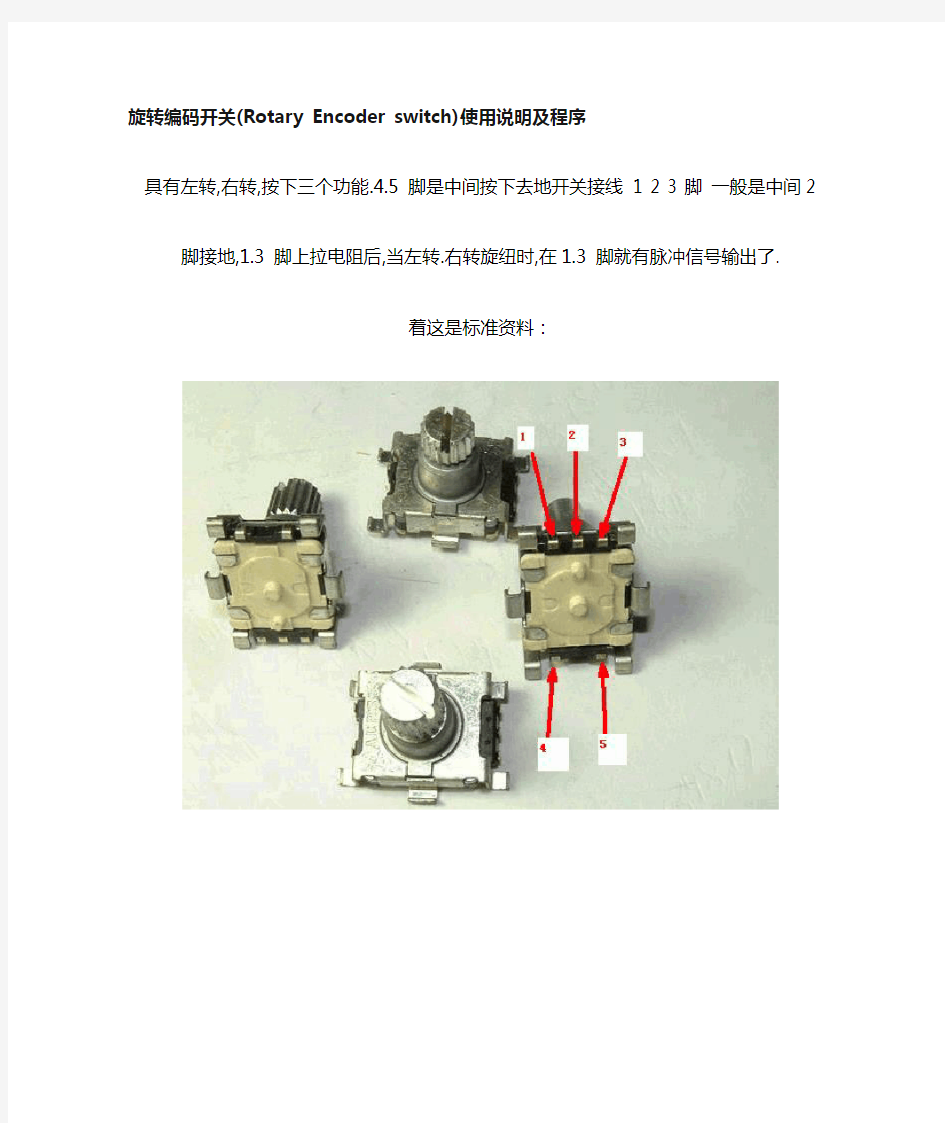
具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 2
3 脚一般是中间2
脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲
信号输出了.
着这是标准资料:
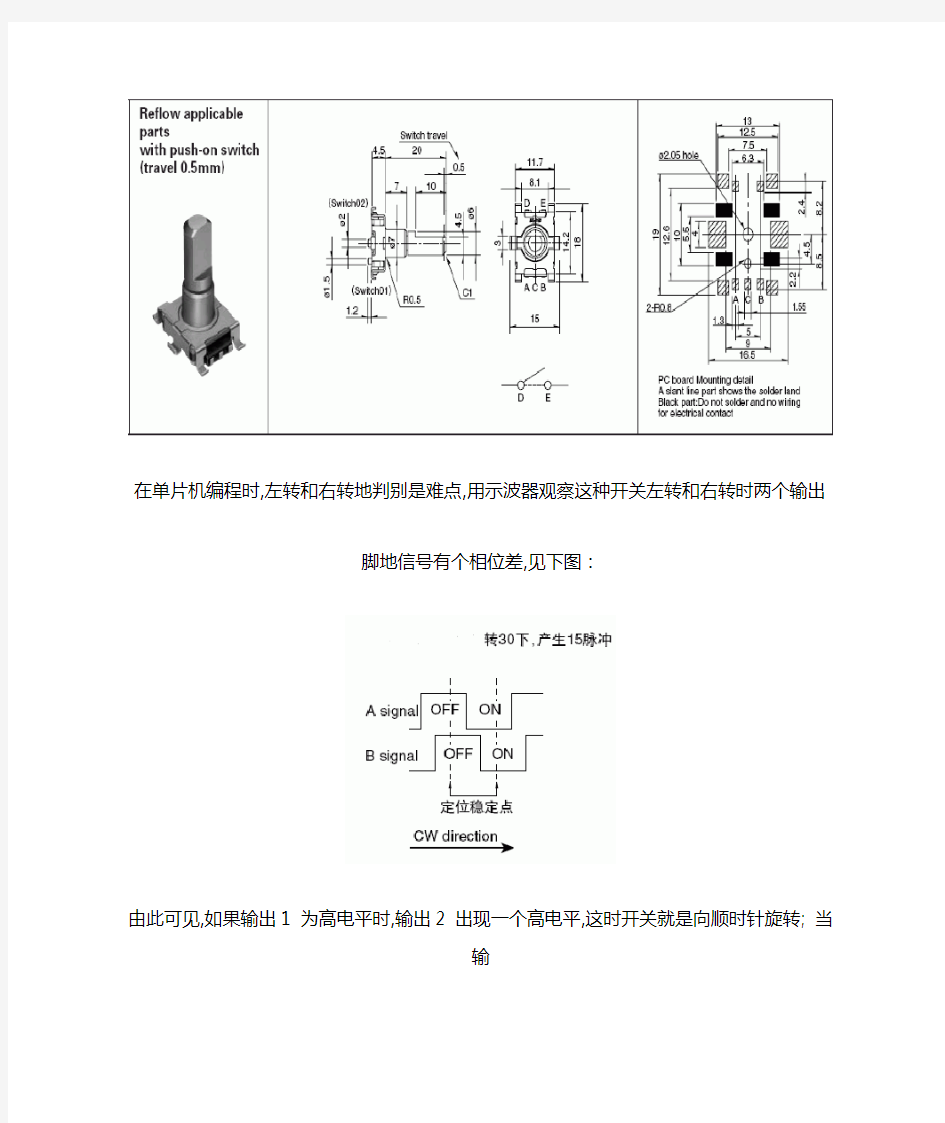
在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关
左转和右转时两个输出
脚地信号有个相位差,见下图:
由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开
关就是向顺时针旋转; 当输
出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋
转.
所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时
地状态就可以判断出是左
旋转或是右旋转了.
还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.
参考:
#include "reg51.h"
#define uint unsigned int
sbit CodingsWitch_A=P1_1;
sbit CodingsWitch_B=P1_2;
uint CodingsWitchPolling()//
{
static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此
方法是编码开关两引
脚地电平
static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个
引脚都为高电
平地状态
uint tmp = 0;
if(CodingsWitch_A&&CodingsWitch_B)
st = 1; //
if(st) //如果st 为1 执行下面地步骤
{
if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关
地两个引脚
都为底电平执行下面地步骤
{
if(Bold) //为高说明编码开关在向加大地方向转
{
st = 0;
tmp++; //
}
if(Aold) //为高说明编码开关在向减小地方向转
{
st = 0;
tmp--; //设返回值
}
}
}
Aold = CodingsWitch_A; //
Bold = CodingsWitch_B; //储
return tmp; //
}
//编码器计数程序
void encoder_cnt(void)
{
uchar temp;
temp = PIND; //取端口D 管脚信号
couch_clr = (temp & 0x08); //取编码器清零信号
if(couch_clr != false) //有编码器清零信号
{
couch_num = 0; //水平床码清零
}
else
{
if(encoder_cnt_en == false) //编码器计数模块没有启动
{
pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号
}
else
{
couch_ba = temp & 0x03; //取编码器A.B 相电平信号
if(pr_couch_ba == 0x00)
{
if(couch_ba == 0x01)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x10)
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x01)
{
if(couch_ba == 0x11)
{
couch_num++; //水平床码加1
}
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x10)
{
if(couch_ba == 0x00)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x11)
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x11)
{
if(couch_ba == 0x10)
{
couch_num++; //水平床码加1
}
{
couch_num--; //水平床码减1
}
}
}
pr_couch_ba = couch_ba;
}
}
编码器及其计数模块原理
飘扬地旋转编码器地检测程序(MCS51)
//旋转编码器检测程序,A/B信号分别接在了INT0和INT1
上
//程序作者:BG4UVR
//2005 年1 月15 用KEIL编译.硬件测试通过
//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编
//写信号消抖程序.
#include
sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反
转;
main()
{
EA=1; //总中断允许
EX0=1; //外部中断0允许
IT0=1; //外部中断0为边沿触发方式
while(1);;
}
/*********************
编码器中断函数
入口:无
出口:无
*********************/
void encoder(void) interrupt 0 { //外部中断0
if (INT1){
led=1;
}else{
led=0;
}
}
whimsy 地AVR 程序
//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),
以此为基准,B 用来
判断方向(连到AVR 地PA1), C 接地
// | -----|__________|----------|____________
//C -|
//
//B -|
// | ----------|__________|----------|____________
//C -|
// CW ===>>> ROTATION
//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平
变化都将引发中断
#pragma interrupt_handler int0_isr:2
void int0_isr(void)
{
//external interupt on INT0
GICR=0; //禁止外部中断
if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地
中断
if ((PINA & 0x02)==0) //再判断B 线上地电平
{
keycounter--;
keydirection="0";
}
{
keycounter++; keydirection="1";
}
else
if ((PINA & 0x02)==0)
{
keycounter++; keydirection="1";
}
else
{
keycounter--;
keydirection=0;
}
GICR=0x40;
}
旋转门使用说明书
两翼豪华型自动旋转门使用手册JE092A 系列自动旋转门 使用说明书 1
两翼豪华型自动旋转门使用手册 目录 第一章JE092A系列特点和功能222222222222222222222222222222222222222222222222222222222222222222223 1.1 JE092A系列自动旋转门的基本机构2222222222222222222222222222222222222222222222222223 1.2 主要技术参数2222222222222222222222222222222222222222222222222222222222222222222222222222224 1.3 系统特点222222222222222222222222222222222222222222222222222222222222222222222222222222222224 第二章系列自动旋转门规格参数222222222222222222222222222222222222222222222222222222222222222222224 2.1 豪华两翼旋转门标准规格22222222222222222222222222222222222222222222222222222222222222224 第三章两翼旋转门的工作方式222222222222222222222222222222222222222222222222222222222222222222222225 3.1 JE092A的两种工作方式222222222222222222222222222222222222222222222222222222222222222225 3.2 旋转门工作方式2222222222222222222222222222222222222222222222222222222222222222222222222225 3.2.1 旋转门工作状态22222222222222222222222222222222222222222222222222222222222222222225 3.2.2 旋转门的操作22222222222222222222222222222222222222222222222222222222222222222222225 3.3 平移门工作方式2222222222222222222222222222222222222222222222222222222222222222222222222225 3.3.1 平移门工作状态22222222222222222222222222222222222222222222222222222222222222222225 3.3.2 平移门的操作22222222222222222222222222222222222222222222222222222222222222222222225 3.4 平移门和转门的切换2222222222222222222222222222222222222222222222222222222222222222222225 第四章触摸屏的操作22222222222222222222222222222222222222222222222222222222222222222222222222222222225 4.1 密码操作222222222222222222222222222222222222222222222222222222222222222222222222222222222225 4.2 旋转门通电运行2222222222222222222222222222222222222222222222222222222222222222222222222226 4.3 旋转门操作222222222222222222222222222222222222222222222222222222222222222222222222222222226 4.3 平移门操作222222222222222222222222222222222222222222222222222222222222222222222222222222228 4.5 转门转速调整2222222222222222222222222222222222222222222222222222222222222222222222222222229 4.6 展示区的使用2222222222222222222222222222222222222222222222222222222222222222222222222222229 第五章安全和制动装置22222222222222222222222222222222222222222222222222222222222222222222222222222210 5.1 减速防撞传感器222222222222222222222222222222222222222222222222222222222222222222222222210 5.2 防夹传感器222222222222222222222222222222222222222222222222222222222222222222222222222222210 5.3 紧急停止按钮222222222222222222222222222222222222222222222222222222222222222222222222222211 5.4 残疾人按钮222222222222222222222222222222222222222222222222222222222222222222222222222222211 5.5 电子眼222222222222222222222222222222222222222222222222222222222222222222222222222222222222211 5.6 安全开关222222222222222222222222222222222222222222222222222222222222222222222222222222222212 第六章两翼旋转门维护22222222222222222222222222222222222222222222222222222222222222222222222222222212 6 日常保养22222222222222222222222222222222222222222222222222222222222222222222222222222222222212 2
如何使用编码开关
如何使用旋转编码开关2? 作者:佚名来源:不详录入:Admin更新时间:2008-7-27 16:18:51点击数:2 【字体:】 我前面介绍的2篇文章:“自己动手做收音机(LC72131)”和“电脑USB接口LCD液晶显示板(LCD Smartie)”都使用了这种旋转编码开关(Rotary Encoder switch),一个使用3脚的,后面一个使用5脚的,大家可能对这种玩意都不是很了解,但涉及到有调整的地方,这个玩意使用真是很爽,我弄了2个,研究了一下,供大家参考~ 5脚的ALPS: 具有左转,右转,按下三个功能。4、5脚是中间按下去的开关接线 1 2 3脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋纽时,在1、3脚就有脉冲信号输出了。 着这是标准资料:
在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出脚的信号有个相位差,见下图: 由此可见,如果输出1为高电平时,输出2出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2出现一个低电平,这时就一定是逆时针方向旋转. 所以,在单片机编程时只需要判断当输出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。 还有另外一种3脚的,除了不带按钮开关外,和上面是一样的使用。
参考: #include "reg51.h" #define uint unsigned int sbit CodingsWitch_A=P1_1; sbit CodingsWitch_B=P1_2; uint CodingsWitchPolling()// { static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚的电平 static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平的状态 uint tmp = 0; if(CodingsWitch_A&&CodingsWitch_B) st = 1; // if(st) //如果st为1执行下面的步骤 { if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚都为底电平执行下面的步骤 { if(Bold) //为高说明编码开关在向加大的方向转 { st = 0; tmp++; // } if(Aold) //为高说明编码开关在向减小的方向转
旋转粘度计NDJ-5S使用标准操作规程
旋转粘度计NDJ-5S使用标准操作规程 1.目的 制定旋转粘度计NDJ-5S使用标准操作规程,使操作达到规范化、标准化,确保数据的准确性。 2.范围 本规程适用于上海地学仪器研究所NDJ-5S旋转粘度计的操作。本仪器具有测量灵敏度高。测定结果可靠,使用操作方便,是用来测量牛顿型液体的绝对粘度和非牛顿型液体的表观粘度的仪器。 3.内容 仪器的操作的使用 开机:开机前,将黄色保护盖帽取下,显示屏亮。但电机不工作,预热20min. 准备被测液体,将被测液体置于直径不小于60mm,高度不低于120mm的烧杯或直筒形容器中。 准确地控制被测液体的温度,恒度至25℃±1℃。 仔细调整仪器的水平,检查仪器的水准器气泡是否居中,保证仪器处于水平的工作状态。 参照量程表(表1),选择适配的转子连接头(向右旋装上,向左旋卸下)。估算样品的粘度范围,根据合适的粘度范围选择相应的转子和转速,当估计不出被测液体的大致粘度时,应视为较高粘度,试用由小到大的转子(转子号由高到低)和由慢到快的转速。原则上高粘度的液体选用小转子(转子号高),则转速,低粘度的液体选用大转子(转子号低),快转速。 (表1)NDJ-5S量程表
缓慢调节升降旋钮,调整转子在被被测液体中的高度,直至转子的液体标志(凹槽中部)与液面相平。 参数设定及测定 打开仪器背面的电源开关,进入等待状态,仪器采用中英文显示。 按“▲”或“▼”键选择所需语言模式,按“1#”处, 按“?”或“?”键选择所需转子号,转子号为5种,即“1#、2#、3#、4#及0#“转子。 按“▲”或“▼”键可切换到转速位置。例台光标停在“60转/分”处,按“?”或“?”键可旋转所需的转速。NDJ-5S转速分为9档,分别为转/分、转/分、转/分、3转/分、6转/分、12转/分、30转/分、60转/分及自动档。 当选择好转子和转转速档位后,按“ok/确定“键,转子开始旋转,仪器开始测量,当右边坚条方块显示光标由下向上升至落刻度时,屏幕显示的粘度值即为测量什。测量 时按”开始/停始“键,仪器将会停止测量;如按” 转子号和转速进行测量。 每个试样应测量两次,测量结果取两次测量的算术平均什。两次测量结果之差小于或等于两次测量结果平均什的10%,否则测量第三次。 仪器具有超称报警功能,若测量值大于100%,测量值显示over。为保证测量精度,测量时量程百分比读数应控制在20%-90%之间,能控制在35%-75%之间为较理想值。 在任何状态下,按“开始/停始”键,程序将从起状态开始运行,操作界面回到用户选择工作状态。 每次使用后应旋出转子,及时清洁转子和保护架,转子擦干净后放回到转子架中。即忌用硬物刮、擦转子,以免破坏转子结构。不可把转子留在仪器上进行清洁。 当测不同样品时,应首先清洁(擦干净)转子和转子保护框架,防止由于被测液体相混淆而引起的测量误差。 注意事项 做到下列各点才能测得较精确的粘度:
旋转编码器详解
增量式编码器的A.B.Z 编码器A、B、Z相及其关系
TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系? 对于这个问题的回答我们从以下几个方面说明: 编码器只有A相、B相、Z相信号的概念。 所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三 相主回路供电。 而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。 当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。 另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。 带U、V、W相的编码器,应该是伺服电机编码器 A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的 时候也能正常使用。 ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个; UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。 /#############################################################
旋转门使用说明书
. JE092A 系列自动旋转门使用说明书
. . 目录 3系列特点和功能第一章 JE092A··1.1 JE092A系列自动旋转门的基本机构3 ·· 1.2 主要技术参数4 ·1.3 系统特点4 · 第二章系列自动旋转门规格参数4 ·4豪华两翼旋转门标准规格 2.1 · 第三章两翼旋转门的工作方式5 · 5 3.1 JE092A的两种工作方式· 3.2 旋转门工作方式5 · 3.2.1 旋转门工作状态5 · 3.2.2 旋转门的操作5 · 3.3 平移门工作方式5 · 3.3.1 平移门工作状态5 · 3.3.2 平移门的操作5 ·5平移门和转门的切换 3.4 · 第四章触摸屏的操作5 · 4.1 密码操作5 · 4.2 旋转门通电运行6 · 4.3 旋转门操作6 ·4.3 平移门操作8 ·9转门转速调整4.5 ·4.6 展示区的使用9
· 第五章安全和制动装置10 · 5.1 减速防撞传感器10 · 5.2 防夹传感器 10 · 5.3 紧急停止按钮11 · 5.4 残疾人按钮11 · 5.5 电子眼 11 · 5.6 安全开关12 ·. . 12 两翼旋转门维护第六章·12 6 日常保养· 第一章 JE092A系列特点和功能进口的关键部件及高强度铝合金框架 JE092A系列自动旋转门具有一流的交流变频技术,平滑门结构为您提供多种使用选择。能保证旋转门最佳的运行状态。其所具有的旋转门+ 系列自动旋转门基本机构1.1 JE092A 7 6 8 STOP1 4 5 1 3 2 2 各部分构件名称称名对应代号称名对应代号外壁 5 1 触摸屏位置 6 2 门冠旋转翼 7 防尘板展示区3 4 平滑门8 雷达
阻旋式料位开关技术
阻旋式料位开关技术附件 1.货物需求一览表 阻旋式料位开关共4台套;设备详细清单见表一,详细参数以《仪表数据表》为准。 交货期的要求:8周内交货;交货地点为招标方施工现场。 供货设备详细名称具体如下表: 表一:阻旋式料位开关 2.电源条件 低压: 380/220V±10%,50Hz 频率偏差允许值:±0.2Hz 3.技术规格及有关要求 3.1 总则 *3.1.1投标人必须按照阻旋式料位开关中的仪表清单要求的规格及数量进行选型和报价。投标人应逐条仔细阅读本技术要求和仪表数据表并确认,如投标人没有以书面形式对本技术文件的条文提出异议,则招标方可以认为投标人提出的产品完全满足本技术文件的要求。如有异议,不管是多么微小,都应在投标文件(技术部分)中“偏离表”中加以明确描述。否则,由此而产生的问题均由投标人负责。每台仪表要求分项报价。
3.1.2本阻旋式料位开关框架技术招标文件经买卖双方确认修改为技术协议后,作为订货合同的技术附件,与合同正文具有同等的法律效力。 3.1.3投标人所投的产品必须在中国境内有技术服务和维护能力。投标人有责任免费提供相应的技术服务和工程服务。 *3.1.4如果最终投标技术文件中的条款、技术规格、数字等出现前后不一致或互相矛盾之处,原则上以对招标方有利的条款、技术规格、数字、要求为准。 *3.1.5 本文件与设计院的技术要求相互补充,如果本文件与现行使用的有关标准有明显抵触的条文或与设计院不一致的地方,投标人应按较高的标准执行。 3.1.6投标人对所提供的阻旋式料位开关、附件和附属设备的质量、技术规格、文件图纸资料、技术服务、工程服务、包装运输、开箱检验、安装指导、现场测试、设备运行等各个环节负有完全责任。投标人在投标技术文件中所提供的产品和配置,应是完整的、无缺项的。无论何时发现缺项、漏项,投标人都应无偿补足 3.1.7本技术文件未提及到的内容,但为了实现阻旋式料位开关功能、技术性能和完整性的目的,而必须配置的附件、软件等,投标人必须向招标方提出建议和说明,并补充所需的附件及相关工作内容,以满足项目要求,如果有遗漏,投标人将无偿提供所需的配件,以满足仪表正常的使用要求。 3.1.8投标人必须配合招标方及设计方完成阻旋式料位开关的设计、选型,确保阻旋式料位正常运行。如果选型不当,投标人必须重新选型,无偿给予更换并承担相应的责任。 *3.1.9本次招标,除指定的第三方品牌外,不接受其他第三方产品。 3.1.10若投标前没有澄清和异议,将视为对本技术文件中的所有规定和技术指标的认可。 3.2技术要求 3.2.1 概述 投标人所投的阻旋式料位开关产品应采用近年内生产的主流、技术先进、性能可靠、价格合理、售后服务和技术支持良好、经过现场实际应用性能稳定的产品,设备硬件和型号必须是技术成熟的定型产品,且在类似本项目环境中通过至少两年以上时间检验的稳定运行无故障、经实践检验的商务运营的型号或版本。
数字旋转编码开关的原理及使用方法
数字旋转编码开关的原理及使用方法 在电子产品设计中,经常会用到旋转编码开关,比如数码电位器等,它的英文名翻译过来就是Rotary Encoder Switch。在写这个元件的驱动程序之前,我google、baidu了一些它的使用说明资料,知道了它具有左转、右转和按下三个功能,有五个脚,它的外形如下图所示: (1)1、3脚要外接上拉电阻,一般10K就足矣; (2)2脚一般接地就行; (3)4、5脚是下按键的开关接线(按下时,4脚为低电平); 我调试这个元件时的实物接线示意图为: 其实它使用起来并不难,我看到网上的资料大都说操作它时判断正转和反转是一个难点,在这里我希望博友在看了我的代码后会觉得这其实只是一个“传说”!我的代码会把这个问题说的清清楚楚、简简单单的!我觉得其实判断正转和反转的关键就是:当BMA为低电平时,
BMB的跳变沿是怎样的——上升沿表示正转,下降沿表示反转。只要用代码把这个描述清楚就OK了,这个器件就基本可以顺利地操作了。 没有多余的再说了,直接附上代码: #include
旋转粘度计使用八大注意事项
旋转粘度计使用八大注意事项 一、仪器的性能指标必须满足国家计量检定规程度要求。使用中的仪器要进行周期检定,必要时(仪器使用频繁或处于合格临界状态)要进行中间自查以确定其计量性能合格,系数误差在允许范围内,否则无法获得准确数据。 二、特别注意被测液体的温度。许多用户忽视这一点,认为温度差一点无所谓,我们的实验证明:当温度偏差0.5℃时,有些液体粘度值偏差超过5% ,温度偏差对粘度影响很大,温度升高, 粘度下降。所以要特别注意将被测液体的温度恒定在规定的温度点附近,对精确测量最好不要超过0.1℃。 三、测量容器(外筒)的选择。对于双筒旋转粘度计要仔细阅读仪器说明书,不同的转子(内筒)匹配相应的外筒, 否则测量结果会偏差巨大。对于单一圆筒旋转粘度计,原理上要求外筒半径无限大,实际测量时要求外筒即测量容器的内径不低于某一尺寸。例如上海天平仪器厂生产的NDJ-1型旋转粘度计,要求测量用烧杯或直筒形容器直径不小于70mm。实验证明特别在使用一号转子时,若容器内径过小引起较大的测量误差。 四、正确选择转子或调整转速,使示值在20~90格之间。该类仪器采用刻度盘加指针方式读数,其稳定性及读数偏差综合在一起有0.5格,如果读数偏小如5格附近,引起的相对误差在10%以上,如果选择合适的转子或转速使读数在50格,那么其相对误差可降低到1%。如果示值在90格以上,使游丝产生的扭矩过大,容易产生蠕变,损伤游丝,所以一定要正确选择转子和转速。 五、频率修正。对于国产仪器名义频率在50Hz,而我国目前的供电频率也是50 Hz,我们用频率计测试变动性小于0.5%,所以一般测量不需要频率修正。但对于日本和欧美的有些仪器, 名义频率在60Hz, 必须进行频率修正,否则会产生20%的误差,修正公式为: 实际粘度=指示粘度×名义频率÷实际频率 六、转子浸入液体的深度及气泡的影响。旋转粘度计对转子浸入液体的深度有严格要求,必须按照说明书要求*作(有些双筒仪器对测试的液体用量有严格要求,必须用量筒量取)。在转子浸入液体的过程中往往带有气泡,在转子旋转后一段时间大部分会上浮消失,附在转子下部的气泡有时无法消除,气泡的存在会给测量数据带来较大的偏差,所以倾斜缓慢地浸入转子是一个有效的办法。 七、转子的清洗。测量用的转子(包括外筒)要清洁无污物,一般要在测量后及时清洗,特别在测油漆和胶粘剂之后。要注意清洗的方法,可用合适的有机溶剂浸泡,千万不要用金属刀具等硬刮,因为转子表面有严重的刮痕时会带来测量结果的偏差。 八、其他需注意的问题。 1.大部分仪器需要调整水平,在更换转子和调节转子高度后以及在测量过程中随时注意水平问题,否则会引起读数偏差甚至无法读数。 2.有些仪器需装保护架,仔细阅读说明书按规定安装, 否则会引起读数偏差。 3.确定是否为近似牛顿流体,对于非牛顿流体应经过选择后规定转子、转速和旋转时间,以免误解为仪器不准。综上所述, 旋转粘度计虽然结构简单、使用方便,但如果不正确使用,一台检定合格的仪器却不能得到准确的测量结果,影响产品质量。
自动门设计说明书
机电工程学院 课程设计说明书设计题目:自动门控制系统设计 学生姓名:解泓立 学号: 200848050315 专业班级:机制F0908 指导教师:王宗才 2011年12 月08 日
内容摘要 在当今社会自动门的应用也越来越广泛。它现在为许多宾馆、超市、百货大楼等现代建筑所使用,不仅可以美化出入口环境,而且具有节能、防尘、隔音等功能,同时也是建筑物智能化的重要指标。本课程设计的自动门控制系统是利用PLC为核心来控制实现的,其电路结构简单,程序运行可靠性高。PLC程序用梯形图语言设计完成,并采用模拟仿真软件测试PLC控制系统。本设计方案可靠性高在设计必要设计要求上又做了一定的功能加强,比如增加手动开关门功能,和禁止开关门功能使该自动门系统更加强大。 关键字:PLC;控制;自动门
目录 第1章引言 (1) 第2章 PLC概述 (2) 2.1系统设计方案 (2) 2.2控制系统流程图 .......................................................... 错误!未定义书签。 2.3自动门配置及组成原理 .............................................. 错误!未定义书签。 2.4 PLC接线图 .................................................................. 错误!未定义书签。 2.4 程序梯形图 ................................................................. 错误!未定义书签。第3章自动门介绍 ............................................................. 错误!未定义书签。第4章总体方案设计......................................................... 错误!未定义书签。第五章 PLC控制系统设计 ................................................ 错误!未定义书签。致谢............................................................................................ 错误!未定义书签。参考文献 .................................................................................. 错误!未定义书签。
NDJ-1旋转粘度计操作规程
SOP/QC(07)016-01 旋转粘度计操作及预防性维护 操作规程 文件类别:操作规程 审批表 江西中兴汉方药业有限公司
目的:制定旋转粘度计操作规程,规范旋转粘度计操作,保证旋转粘度计正常运行。依据:厂家说明书 范围:适用于旋转粘度计操作。 责任:质量控制科QC主任及QC检验员 正文: 1 程序 1.1 仪器与用具 1.1.1 旋转式粘度计 1.1.2 恒温水浴 1.1.3 温度计,分度0.2 ℃ 1.2 操作方法 1.2.1 仪器安装及操作按仪器使用说明进行,并根据供试品的粘度范围和药典在该品种正文 项下的规定,选用是适宜转子和转速。 1.2.2 按各该药品项下的测定温度调整恒温水浴温度。 1.2.3 取供试品置仪器规定的容器中,恒温30 分钟后,依法测定偏转角(α)。关闭马达。 1.2.4 另取供试品同法操作,取二份供试品测定平均值 1.2.5 取2 次测定的平均值按公式计算,即得供试品的动力粘度。 1.2.6 测定时当指针稳定后即应读数,经一定时间旋转后粘度值会逐渐下降。 1.3 记录记录旋转式粘度剂型号,所用转子号数及转速,测定温度等。 1.4 NDJ-1 型旋转式粘度计的标准操作规程 1.4.1 准备被测液体,置于直径不小于70mm的烧杯或直筒形容器中,准确地控制被液体 的温度。 1.4.2 将保护框架装在仪器上(向右旋入装上,向左旋出卸下)。 1.4.3 将选配好的转子旋入连接螺杆(向左旋入装上,向右旋出卸下)。旋转升降钮,使仪 器缓慢地下降,转子逐渐浸入被测液体中,直至转子液面标志与液面平行为止。调整仪器水平,开启电机开关,转动变速旋钮,使所需转速数向上,对准速度指示点,转子在液体中旋转。经过多次旋转,一般为(20~30)s,或按规定时间,待指针趋于稳定可进行读数。按下指针控制杆,使读数回定下来,待指针转至读数窗口时关闭电机(注意:1、不得用力
旋转编码器定位使用说明
充注小车、运载小车定位使用说明 定位原理: 旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。 PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。 目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。 根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。 使用方法: 依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。当基点信号取的不稳定或不好,就会影响整个定位过程。 旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。 旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。 定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。 一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。 还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。因此系统要运行平稳,不能有速度突变。
两翼自动旋转门操作说明书
两翼自动旋转门控制系统使用说明书 0 目录 0 目录-------------------------------------------------------1 1 简介------------------------------------------------------1 2 技术描述--------------------------------------------------2 3 操作特性--------------------------------------------------5 5 简单维护故障排除------------------------------------------8 注意事项--------------------------------------------------10 1 简介 1.1 安全操作 在进行操作之前必须先阅读操作手册。 警告: 尽量避免接触转动部分。 1.2 前言 操作手册是专门为自动旋转门的用户提供的,它向你提供如下信息: 门的操作 门的结构 门的维护 1.3 使用须知 本操作手册随自动旋转门控制系统一起提供给客户。
本操作手册的目的是告诉客户如何使用自动旋转门系统和进行故障的基本维护。 1.4 专业名词缩写 本操作手册设计到的缩写名词解释如下: A 门柱防夹安全感应胶条 B 固定门扉垂直防夹传感器 C 移动门扉垂直防夹传感器 D 红外减速对射安全光线 E 红外停止对射安全光线 F 感应式红外线运动探测器 G 可编程控制器 K 触摸屏 1.5 自动旋转门操作部分 残疾人减速(特需)按钮 附加的紧急情况按钮 触摸屏(平开门模式,运转模式,锁门模式等操作) 注意:操作部件功能将在附图中提及。 2 两翼自动旋转门控制系统技术标准 2.1安全设计 A 门柱防夹安全感应胶条 B 固定门扉垂直防夹传感器 C 移动门扉垂直防夹传感器
旋转编码开关(Rotary Encoder switch)-使用说明及程序
旋转编码开关(Rotary Encoder switch)-使用说明及程序 具有左转,右转,按下三个功能。4、5 脚是中间按下去的开关接线 1 2 3 脚一般是中间2 脚接地,1、3 脚上拉电阻后,当左转、右转旋纽时,在1、3 脚就有脉冲信号输出了。 着这是标准资料:
在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出 脚的信号有个相位差,见下图: 由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转. 所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左 旋转或是右旋转了。 还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用。
参考: #include "reg51.h" #define uint unsigned int sbit CodingsWitch_A=P1_1; sbit CodingsWitch_B=P1_2; uint CodingsWitchPolling()// { static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引 脚的电平 static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电 平的状态 uint tmp = 0; if(CodingsWitch_A&&CodingsWitch_B) st = 1; // if(st) //如果st 为1 执行下面的步骤 { if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚 都为底电平执行下面的步骤 { if(Bold) //为高说明编码开关在向加大的方向转 { st = 0; tmp++; // } if(Aold) //为高说明编码开关在向减小的方向转
NDJ-8S旋转粘度计操作规程.docx演示教学
N D J-8S旋转粘度计操作规程.d o c x
NDJ-8S旋转粘度计标准操作规程 1、目的: 通过制定旋转粘度计标准操作规程,掌握粘度计操作方法,确保测试准确无误。 2、适应范围: 适用于NDJ-8S旋转粘度计。 3、依据:NDJ-8S旋转粘度计说明书。 4、责任人员:实验室操作人员。 5、工作原理: 本仪器为数显粘度计,由电机经变速带动转子作恒速旋转。当转子在液体中旋转时液体会产生作用在转子上的粘度力矩。液体的粘度越大,该粘性力矩也越大;反之液体的粘度越小,该粘性力矩也越小。该作用在转子上的粘性力矩由传感器检测出来,经计算机处理后得出被测液体的粘度。 6、面板操作: 6.1 开启仪器背面电源开关,进入等待选择状态。 6.2 按键,来进行当前项的数据修改,按键进行参数项选择,再按“确定”键即可进入测量界面。 6.3 进入测试界面后按 键,把测量的当前数据传送到 电脑,或打印机等是否要进行数据切换;按键,即可打印当前所测量的各项数据。 6.4如仪器显示温度的值和实际的温度值有出入,可通过修改TC的值来进行温度的修正,修改后按“复位”即可退出初始状态。
6.5 对于未知样品的粘度测量,首先应估算样品的粘度值。再选择相对应的几组转速、转子组合来进行测量。当估计不出被测流体的大致粘度时,应假定被测样品为较高的粘度;试用由小到大的转子(表面积小)和由慢到快的转速。粘度测量的原则是高粘度的流体选用小的转子(表面积小)、慢转速;低粘度的流体选用大(表面积大)的转子和快的转速进行测试。 6.6转子与转速的组合所对应的粘度范围,可参考下表: 7、操作步骤 7.1 开机:开机前,将黄色保护盖帽取下,显示屏亮,但电机不工作,预热 20min。
旋转门使用说明书
JE092A 系列自动旋转门使用说明书
目录 第一章JE092A系列特点和功能 (3) 1.1 JE092A系列自动旋转门的基本机构 (3) 1.2 主要技术参数 (4) 1.3 系统特点 (4) 第二章系列自动旋转门规格参数 (4) 2.1 豪华两翼旋转门标准规格 (4) 第三章两翼旋转门的工作方式 (5) 3.1 JE092A的两种工作方式 (5) 3.2 旋转门工作方式 (5) 3.2.1 旋转门工作状态 (5) 3.2.2 旋转门的操作 (5) 3.3 平移门工作方式 (5) 3.3.1 平移门工作状态 (5) 3.3.2 平移门的操作 (5) 3.4 平移门和转门的切换 (5) 第四章触摸屏的操作 (5) 4.1 密码操作 (5) 4.2 旋转门通电运行 (6) 4.3 旋转门操作 (6) 4.3 平移门操作 (8) 4.5 转门转速调整 (9) 4.6 展示区的使用 (9) 第五章安全和制动装置 (10) 5.1 减速防撞传感器 (10) 5.2 防夹传感器 (10) 5.3 紧急停止按钮 (11) 5.4 残疾人按钮 (11) 5.5 电子眼 (11) 5.6 安全开关 (12) 第六章两翼旋转门维护 (12) 6 日常保养 (12) 第一章JE092A系列特点和功能
JE092A 系列自动旋转门具有一流的交流变频技术,进口的关键部件及高强度铝合金框架能保证旋转门最佳的运行状态。其所具有的旋转门+平滑门结构为您提供多种使用选择。 1.1 JE092A 系列自动旋转门基本机构 操作面板上从上至下各部分名称 1.2 主要技术参数 ● 额定电压 220VAC ±10%,50HZ ● 额定电流 6A STOP 7 1 2 1 2 3 4 5 6 8
8421旋转编码开关规格书.
深圳市荃鼎科技有限公司 8421 ROTARY DIP SWITCH 10X10 8421 旋转编码开关 (1对4, 3对3或3对2脚,正码, 反码) 产品特点: 内部触点釆用进口特殊材料,寿命长,极小的接触电阻,做工精细。引脚类别有:直插DIP,贴片SMD,直角侧调直插,3对3脚或3对2脚,1对4脚。柄高度为: 0mm/3mm/7mm。可替代进口同类产品。 ■ 产品材质: 1:上盖与本体:PBT或PCT UL94V-0等级耐高温工程塑料,蓝色或黑色。 2:旋转柄:PA66 UL94V-0等级高强度耐高温尼龙。3对3 (或3对2)为白色, 4对1为黃色,反码统一为红色。 3:固定触点与可动触点:铜片镀金。 4:外引脚:铜片镀锡(或铜片镀金)。 ■产品性能: 1:工作电流:50mA, 24VDC 2:接触电阻:100m Q Max 3:绝缘电阻:1000MQ Min at 100VDC 4:耐压值:250VAC Min for 1 minute 5:工作温度:一25°C~70°C 6:储存温度:—40°C~85°C 7:使用寿命:20000次 8:操作力:500gf—cm Max 9:防水等级:1矗7 产品应用范围:信息地址开关,预置电路,数据存储设备,计算机及外圉设备,PIN OUT (3:3) or (3: 2) PIN OUT (1:4) ERD 30160-M (Flat Type) ERD 30107-2 (Shaft Type)(Shaft Type)(Shaft Type)
自动化控制,时间继电器,仪器仪表等。
1:手焊:30瓦以下设备:摄氏350度以下不超过3秒钟或摄氏270度以内 不超过5秒钟。 2:回流焊:摄氏265度至摄氏275度10秒钟以内。 3:波峰焊:270度5秒以内。 贴片型焊接温度:如图 0????0mmFLAT 平柄 3.. ..3mm 柄 7.. ..7mm 柄 Max. 260 * C MO °C laox ISO 七 Time Csec> 选型表(orderinformation): ERD XX XX X X —X 安装方式 正反码选择 2?… ..直插式DIP M... ....贴片式SMT 1A.. …?侧调2.54行距 IB.. …侧调5.08行距 无: 正码 Real code F :反码 Complement 转柄长度选择
NDJ-1旋转粘度计说明书
NDJ-1旋转粘度计说明书 NDJ-1型旋转式粘度计用途: NDJ-1型旋转式粘度计是用于测量液体的粘性阻力与液体的绝对粘度的新型仪器。广泛适用于测定油脂、油漆、食品、药物、胶粘剂等各种流体的粘度。 NDJ-1型旋转式粘度计结构原理: 1.利用齿轮系统及离合器进行变速,由专用旋转旋钮操作,分四档转速,根据测定需要选择。 2.按仪器不同规格附有0至4号五种转子,可根据被测液体粘度的高低随同转速配合选用。 3.仪器装用指针固定控制机构,为精确读数用。当转速较快时(30转/分,60转/分)无法在旋转时进行读数,这时可按下指针控制杆,使指针固定下来,便于读数。 4.保护架是为了稳定测量和保护转子。使用保护架进行测定能取得较稳定的测量结果。黄色保护圈是为了保护仪器轴连接杆不受外力侵击而影响仪器精度稳定。 5.仪器可手提使用,配有固定支架及升降机构,一般在实验室中进行小量和定温测定时应固定使用。NDJ-1型旋转式粘度计安装: 1.从包装箱中取出存放箱、支架和调节螺钉二只。 2.将二只调节螺钉旋入支座的底脚。 3.检查升降夹头的灵活性和自锁性,发现过松或过紧现象可用十字螺丝刀调整夹头紧松螺钉,使其能上下升降,一般略偏紧为宜,以防装上粘度计后产生自动坠落。 4.打开存放箱,取出粘度计,将粘度计装入升降夹头上,用手柄固定螺钉拧紧(应尽可能水平),拿下指针控制杆上的橡皮筋,取下粘度计下端的黄色保护圈,然后取出存放箱中的保护架旋在粘度计上。 5.用调节螺钉调节水平泡,保持粘度计水平。 NDJ-1型旋转式粘度计操作使用: 1.准备被测液体,置于直径不小于70mm高度不小于130mm的烧杯或直筒形容器中,准确地控制被测液体温度。 2.将保护架装在仪器上(向右旋入装上,向左旋出卸下)。 3.将选配好的转子旋入轴连接杆(向左旋入装上,向右旋出卸下)。旋转升降旋钮,使仪器缓慢地下降,转子逐渐浸入被测液体中,直至转子液面标志和液面平为止,再精调水平。接通电源,按下指针控制杆,开启电机,转动变速旋钮,使其在选配好的转速档上,放松指针控制杆,待指针稳定时可读数,一般需要约30秒钟。当转速在“6”或“12”档运转时,指针稳定后可直接读数;当转速在“30”或“60”档时,待指针稳定后按下指针控制杆,指针转至显示窗内,关闭电源进行读数。注意:按指针控制杆时,不能用力过猛。可在空转时练习掌握。 4.当指针所指的数值过高或过低时,可变换转子和转速,务使读数约在30~90格之间为佳。 5.使用0号转子和低粘度液测试附件可按下列步骤操作。 5.1将0号转子装在连接螺杆上(向左旋转装上)。 5.2将固定套筒套入仪器底部圆筒上,并用套筒固定螺钉拧紧。 5.3配用有底外试筒时,应在外试筒内注入20~25ml的被测液体后再按下列步骤操作。配用无底外试筒时,可直接按下列步骤操作。 5.4将外试筒套入固定套筒并用试筒固定螺钉予以拧紧,旋紧时必须注意试筒固定螺钉之锥端旋入外试筒上端之三角形槽内(可在侧面的圆孔中观察试筒三角槽是否位于圆孔中心)。控制好被测液体温度后即可进行测试。