有限元网格划分

本文讨论了有限元网格的重要概念,包括单元的分类、有限元误差的分类与影响因素;并讨论分析结果的收敛性控制方法,并由实例说明了网格质量及收敛性对取得准确分析结果的重要性。同时讨论了一些重要网格控制的建议及其他网格设定的说明。
一、基本有限元网格概念
1.单元概述
几何体划分网格之前需要确定单元类型。单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。
2.单元分类
选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不同的分类方法,上述单元可以分成以下不同的形式。
3.按照维度进行单元分类
根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。
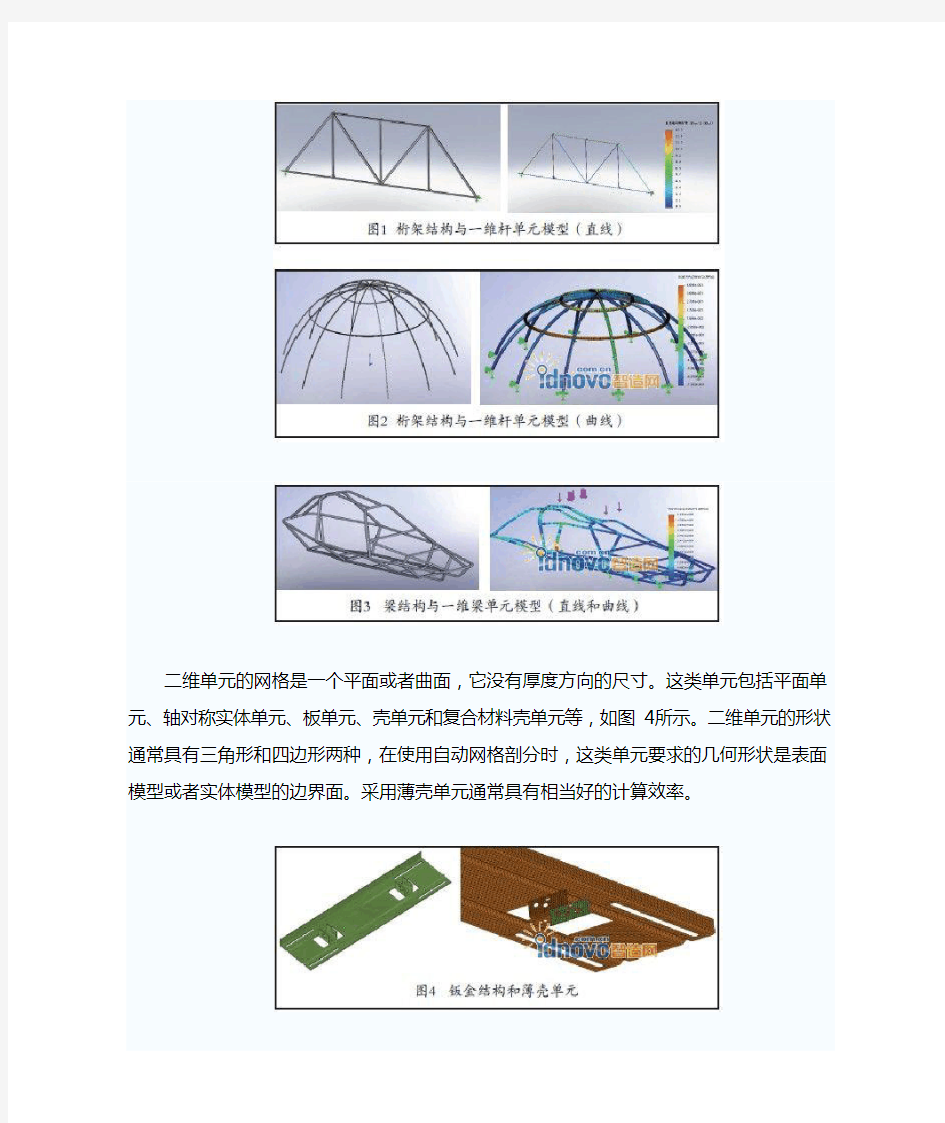
一维单元的网格为一条直线或者曲线。直线表示由两个节点确定的线性单元。曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。
二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸。这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。
三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示。在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。
4.按照插值函数进行单元分类
根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。
线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面。这类单元的优点是节点数量少,在精度要求不高或
者结果数据梯度不太大的情况下,采用线性单元可以得到较小的模型规模。但是由于单元位移函数是线性的,单元内的位移呈线性变化,而应力是常数,因此会造成单元间的应力不连续,单元边界上存在着应力突变,如图6所示。
二次单元的插值函数是二次多项式,其网格不仅在每个顶点处有角节点,而且在棱边上还存在一个边节点,因此网格边界可以是二次曲线或者曲面。这类单元的优点是几何和物理离散精度较高,单元内的位移呈二次变化,应力呈线性变化,因此单元边界上的应力是连续的。但是在单元数量相同的条件下二次单元的节点数比线性单元的节点数多,模型的规模较大,如图7和图8所示。
三次单元的插值函数是三次多项式,其网格的每条边上存在两个节点,有些三次单元还具有内部节点。这类单元的离散精度更高,但是由于单元节点数较多,网格划分较为困难,模型规模很大,一般用于具有特殊精度要求的场合,如图9所示。
对于一阶和二阶单元,我们通常也称其为H单元。三阶及以上的单元,我们也称其为P单元,高阶次的P单元可以更好地拟合变形形状,特别对于曲率或者应力梯度变化较大的区域会较为真实的模拟,但会比H-单元有较多的运算量,如图10所示。
5.结构单元与非结构单元
根据单元能否离散成实际结构,可以将单元分为结构单元和非结构单元。能离散成实际结构的称为结构单元,如轴对称单元离散轴对称结构,杆、梁单元用于离散杆件结构,实体单元用于离散空间结构等,这些单元都属于结构单元。除此之外,还有一类单元并不用于实际结构的离散,而是在模型中模拟一些特殊的结构和边界条件,如质量单元用于实际的物体质量效应,弹簧和阻尼单元用于模拟结构的弹性支承和减振吸能部件,间隙和接触单元用于结构之间的相互接触作用,螺栓预紧力单元用于模拟螺栓的预紧力,刚体单元用于模拟节点之间的刚性连接等,这些单元称为非结构单元。
由于非结构单元非常抽象,使用起来有一定的难度,在设计仿真一体化分析里面通常会将其工程化,帮助使用者淡化其力学概念。
6.节点和单元的重要力学概念
针对前述的单元分类,此处要澄清关于节点和单元的一些非常有用的总结性概念。
◎有限元分析首先计算节点的位移量,接着再推算其对应单元的应变值,再计算积分点的应力。因此位移的准确性高于应变、应变高于应力;
◎当结构静力平衡时计算变形的单元是求得准确有限元分析结果的关键,因此线性计算中单元不可以变形过大,否则会造成求解失败;
◎网格质量概括来说,初始网格必须可呈现初始模型的几何形状,而且要足够“弹性”以符合静力平衡后的变形几何形状;
◎在预计会有应力梯度变化剧烈的位置上,为预测其准确变形情况,细小特征几何必须要更精确符合,以利于准确计算这些位置上的应力值;
◎在理想曲率边线与网格曲率边线之间的差距称之为离散误差。
二、有限元误差分析
1.有限元误差
有限元的误差主要来自两个方面,一是模型误差,一是计算误差。
模型误差是指将实际工程问题抽象为适合计算机求解的有限元模型时所产生的误差,即有限元模型和实际问题之间的差异。它包括有限元离散处理所固有的原理性误差,也可能包括几何模型处理、实际工况转化为模型边界条件时所带来的偶然性误差。
计算误差是指采用数值方法对有限元模型进行计算所产生的误差,误差的性质是舍入误差和截断误差。
模型误差包含离散误差、边界条件误差和单元形状误差,离散误差包含物理离散误差和几何离散误差。
2.离散误差
物理离散误差是插值函数和真实函数之间的差异,其大小与单元尺寸和插值多项式的阶次有关,单元尺寸减小也就是网格划分越密,插值函数的阶次增加,将使有限元的解收敛于精确解。
几何离散误差是指离散后的几何体与原有几何形状上的差异。对于由直线或者平面边界构成的规则结构,这类误差较小。对于具有复杂曲线或者曲面边界构成的结构,离散后会产生较大的形状误差。
本文下面通过SolidWorks Simulation来详细讨论物理离散误差与几何离散误差的具体操作细节。
三、收敛性及自动收敛方法
一般而言,网格拥有较多的单元,可得到较准确的结果。会有更多的节点可供计算,所以结果会较准确。较多的单元也就表示单元大小较小,所以物理离散误差可减小。实际分析上也有极限,在收敛性分析过程中网格尺寸一再缩减也不一定会对精确结果有帮助。
对一给定的几何而言,要达到收敛性的网格会与外部负载条件及边界约束条件有关(见图11)。在线性静态分析中,载荷大小不是收敛性的系数。
下面以SolidWorks Simulation的收敛性为例简单介绍收敛性的处理方法和技巧。
SolidWorks Simulation提供三种收敛性的技术。包括有手动控制收敛性和软件自动控制收敛性技术。其中自动控制收敛性的方法我们也称之为自适应方法,如图12所示,包括自动H自适应方法(H-adaptive)、自动P自适应方法(P-adaptive)。
1.自动H自适应方法(H-adaptive)
H方法的本质就是根据应力梯度的变化情况自动在应力梯度大的地方,根据预先规定的收敛准则,重新自动剖分网格,进行自动加密(见图13,原始网格与H自适应网格结果)。
SolidWorks Simulation的H方法具有以下特性。
1)适用于实体零件及装配体(仅支持实体单元)的静态分析研究;
2)在应变能误差较高的区域使用较小网格尺寸;
3)可以在应变能误差较低区域网格粗化(加大网格尺寸),便于在后面的优化计算中降低计算规模,大大提高优化效率;
4)目标精度定义应变能量密度范数的精度等级默认值是98%,此处可以调整
能量密度范数的精度等级,一般情况下默认的精度可以达到分析的要求;
5)精度偏差设置(见图13);
◎精度偏差设置有局部(本地)和全局(整体);
◎滑动杆朝局部移动,指示程序以较少的单元取得精确的峰值应力结果;
◎滑动杆朝全局移动,指示程序取得整体零件刚度精确的结果,而不是应力结果。
6)若不确定,保持默认值即可;
7)网格粗糙化的目的是对应力梯度变化不大的区域,加大此处的单元尺寸,可以使用较小的网格得到较好的结果,同时也便于后继的优化求解。
图14展示了某机械零件,采用一阶单元不同单元大小,并采用自适应方法进行分析。方案1采用平均单元大小13.6mm 进行网格划分,然后采用H自适应网格划分,此时得到的最大应力点的应力是44MPa。方案2采用平均单元大小为3.4mm进行网格划分,然后采用H自适应网格划分,此时得到的最大应力点的应力是75.6MPa。两者之间有42%的差异。说明采用线性单元,使用H方法得不到准确的结果。
同样的模型,不做任何修改采用二阶单元进行网格划分,如图15所示,然后采用H方法,得到的应力误差小于3%,说明采用较大的全局二阶单元,然后采用H方法可以得到相当准确的应力结果。
2.自动P自适应方法(P-adaptive)
P方法的本质就是根据约束条件(如应变能)的变化情况自动在约束条件大的地方,根据预先规定的收敛准则,调整该处的单元形函数的阶次,在单元大小不变的情况下提高单元内部应力的精确性(见图16)。
SolidWorks Simulation的P方法具有以下特性。
1)适用于实体零件及装配体的静态分析研究,但装配体仅支持结合方式,不可以有其他接触存在;
2)收敛准则有总应变能、均方根合位移、均方根von Mises应力;
3)默认收敛准则是总应变能,均方根合位移及von Mises应力准则并不常用;
4)默认的设定通常就足够,由于系统通常会提前满足设定精度,因此最大p-order及最大循环数很少用到;
5)开始p-阶序起始于2,设为1会报错;
6)必须使用二阶单元为初始网格;
◎一般而言初始的网格尺寸影响很小(见图17);
◎Jacobian(雅可比检查)对误差有较大的影响,在局部位置无法反馈结果。建议将Jacobian检查设定在节点(见图18)。
四、手动收敛性检查
1.相对收敛性检查
在大多数复杂情况下很难通过自适应方法得到好的结果,必须通过相对收敛性检查得到收敛的结果(见图19),其操作步骤如下。
1)执行多个分析研究,逐步调整加密网格,检查应力值的变化情形;
2)每次以2:1比例调整加细网格尺寸;
3)如果局部网格尺寸远小于整体网格尺寸,要留意扭曲失真的情况。
2.等值线质量检查(见图20)
1)应力等值线应该和连续几何体一样连续,使用不连续选项可以更清楚看到不连续的结果,如果几何体光滑连续而结果呈锯齿状,表明此处结果不好,需要加密网格或提高网格质量;
2)没有一个收敛的绝对测试标准,但是可以显示区域检查;
3)显示带有结果的单元结果可以显示他们如何影响结果。
3.误差估算方法1:能量范数值(见图21)
1)ERR能量范数误差绘图可以显示出相邻元素之应力值差异,理论上要愈小愈好;
2)并非绝对是收敛性测试方法,但会显示出要特别注意的高误差区域;
3)最佳的应用方式是在比较不同的设计过程。如果在某个区域的误差估算已经调整至最佳状况并维持一致,其分析结果的比较应该较具有实际意义。
4.误差估算方法2:节点和单元应力值比较(见图22)
1)节点解是临近单元的节点应力的平均值;
2)单元解是每个单元所有节点应力的平均值;
3)评定标准,理论上节点和单元应力值应该有较小的差异;
4)一般情况下,节点应力和单元应力的误差不允许超过5%。
五、手动收敛性控制和自动收敛性总结及建议
1)针对单一零件的分析
◎使用h-adaptive收敛方法,二阶质量单元及默认单元大小;
2)针对结合的装配体分析
◎使用p-adaptive收敛方法,二阶质量单元及默认单元大小;
◎如果有Jacobian误差发生,使用不同的初始网格尺寸执行可避免不正确的高应力值产生;
3)针对有连接接头或接触条件的装配体分析
◎使用传统的手动H-单元收敛方法;
◎使用二阶质量单元及默认单元大小;
◎使用初始网格控制以确保符合未变形的几何体; ◎使用局部网格控制在需要位置以达到收敛。(未完待续)
有限元网格划分的基本原则
有限元网格划分的基本原则 划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减
在ANSYS平台上的复杂有限元网格划分技术
在ANSYS平台上的复杂有限元网格划分技术 1. 网格密度 有限元结构网格数量的多少将直接影响计算结果的精度和计算规模的大小。一般来说,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,怎样在这两者之间找到平衡,是每一个CAE工作者都想拥有的技术。网格较少时,增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高很少,而计算时间却大幅度增加。所以应该注意网格数量的经济性。实际应用时,可以比较两种网格划分的计算结果,如果两次计算结果相差较大,应该继续增加网格,重新计算,直到结果误差在允许的范围之内。 在决定网格数量时还应该考虑分析类型。静力分析时,如果仅仅是计算结构的变形,网格数量可以少一点。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在结构响应计算中,计算应力响应所取的网格数量应该比计算位移响应的多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选取较少的网格,如果计算的阶数较高,则网格数量应该相应的增加。在热分析中,结构内部的温度梯度不大时,不需要大量的内部单元,否则,内部单元应该较多。 有限元分析原则是把结构分解成离散的单元,然后组合这些单元
解得到最终的结果。其结果的精度取决于单元的尺寸和分布,粗的网格往往其结果偏小,甚至结果会发生错误。所以必须保证单元相对足够小,考虑到模型的更多的细节,使得到的结果越接近真实结果。由于粗的网格得到的结果是非保守的,因此要认真查看结果,其中有几种方法可以帮助读者分析计算结果与真实结果之间的接近程度。 最常用的方法是用对结果判断的经验来估计网格的质量,以确定网格是否合理,如通过看云图是否与物理现象相一致,如果云图线沿单元的边界或与实际现象不一致,那么很有可能结果是不正确的。 更多的评价网格误差的方法是通过比较平均的节点结果和不平均的单元结果。如在ANSYS中,提供了两条显示结果的命令:PLNS,PLES。前者是显示平均的节点结果,后者是显示不平均的单元结果。PLNS命令是计算节点结果,它是通过对该节点周围单元结果平均后得到的,分析结果是基于单元高斯积分点值,然后外插得到每个节点,因此在给定节点周围的每个单元都由自己的单元计算得到,所以这些节点结果通常是不相同的。PLNS命令是在显示结果之前将每个节点的所有结果进行了平均,所以看到的云图是以连续的方式从一个单元过渡到另外一个单元。而PLES命令不是对节点结果平均,所以在显示云图时单元和单元之间是不连续的。这种不连续程度在网格足够密(即单元足够小)的时候会很小或不存在,而在网格较粗时很大。由于PLNS结果是一个平均值,所以它得到的结果会比PLES的结果小,他
ANSYS有限元网格划分的基本原则
ANSYS有限元网格划分的基本原则 引言 ANSYS中有两种建立有限元模型的方法:实体建模和直接生成。使用实体建模,首先生成能描述模型的几何形状的几何模型,然后由ANSYS程序按照指定的单元大小和形状对几何体进行网格划分产生节点和单元。对于直接生成法,需要手工定义每个节点的位置和单元的连接关系。 一般来说对于规模较小的问题才适于采用直接生成法,常见的问题都需要先通过实体建模生成几何模型,然后再对其划分网格生成有限元模型。随着计算机性能的提高,分析模型的复杂性和规模都越来越大,而直接生成法也因其自身的局限性逐渐的被淘汰,所以正确的理解划分网格的目的和掌握划分网格的方法不论是对ANSYS的学习还是对二次开发都有重要的作用,尤其是当模型复杂度大,对模型的某些部分网格需要特殊处理时,这种对划分网格深度的理解作用更加明显。 2 常用高级网格划分方法 随着ANSYS功能的越来越强大和计算机性能的飞速提高,有限元分析向着大型化、复杂化的方向发展,而划分网格的观念也需要逐渐从二维模型向三维模型上上转变。这里主要描述三种常见的高级划分网格的方法,正确的理解和掌握这些划分网格的思想对于二次开发者来说非常的重要。 1)延伸网格划分 延伸网格划分是指将一个二维网格延伸生成一个三维网格;三维网格生成后去掉二维网格,延伸网格划分的步骤大体包括:先生成横截面、指定网格密度并对面进行网格划分、拖拉面网格生成体网格、指定单元属性、拖拉、完成体网格划分、释放已选的平面单元。 这里通过一个延伸网格划分的简单例子来加深对这种网格划分的理解。 图1 延伸网格划分举例 建立如图1所示的三维模型并划分网格,我们可以先建立z方向的端面,然后划分网格,通过拖拉的方法在z方向按照图中所示尺寸要求的三维模型,只需
_基于ANSYS的有限元法网格划分浅析
文章编号:1003-0794(2005)01-0038-02 基于ANSYS的有限元法网格划分浅析 杨小兰,刘极峰,陈 旋 (南京工程学院,南京210013) 摘要:为提高有限元数值的计算精度和对复杂结构力学分析的准确性,针对不同分析类型采用了不同的网格划分方法,结合实例阐述了ANSYS有限元网格划分的方法和技巧,指出了采用ANSYS有限元软件在网格划分时应注意的技术问题。 关键词:ANSYS;有限元;网格;计算精度 中图号:O241 82;TP391 7文献标识码:A 1 引言 ANSYS有限元分析程序是著名的C AE供应商美国ANSYS公司的产品,主要用于结构、热、流体和电磁四大物理场独立或耦合分析的CAE应用,功能强大,应用广泛,是一个便于学习和使用的优秀有限元分析程序。在ANSYS得到广泛应用的同时,许多技术人员对ANSYS程序的了解和认识还不够系统全面,在工作和研究中存在许多隐患和障碍,尤为突出的是有限元网格划分技术。本文结合工程实例,就如何合理地进行网格划分作一浅析。 2 网格划分对有限元法求解的影响 有限元法的基本思想是把复杂的形体拆分为若干个形状简单的单元,利用单元节点变量对单元内部变量进行插值来实现对总体结构的分析,将连续体进行离散化即称网格划分,离散而成的有限元集合将替代原来的弹性连续体,所有的计算分析都将在这个模型上进行。因此,网格划分将关系到有限元分析的规模、速度和精度以及计算的成败。实验表明:随着网格数量的增加,计算精确度逐渐提高,计算时间增加不多;但当网格数量增加到一定程度后,再继续增加网格数量,计算精确度提高甚微,而计算时间却大大增加。在进行网格划分时,应注意网格划分的有效性和合理性。 3 网格划分的有效性和合理性 (1)根据分析数据的类型选择合理的网格划分数量 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格。如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,可划分较少的网格。 (2)根据分析数据的分布特点选择合理的网格疏密度 在决定网格疏密度时应考虑计算数据的分布特点,在计算固有特性时,因为固有频率和振型主要取决于结构质量分布和刚度分布,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差很大,可减小数值计算误差。同样,在结构温度场计算中也趋于采用均匀的网格形式。在计算数据变化梯度较大的部位时,为了更好地反映数据变化规律,需要采用比较密集的网格,而在计算数据变化梯度较小的部位,为了减小模型规模,则应划分相对稀疏的网格,这样整个结构就表现出疏密不同的网格划分形式。 以齿轮轮齿的有限元分析模型为例,由于分析的目的是求出齿轮啮合传动过程中齿根部分的弯曲应力,因此,分析计算时并不需要对整个齿轮进行计算,可根据圣文男原理将整个区域缩小到直接参与啮合的轮齿。虽然实际上参与啮合的齿数总大于1,但考虑到真正起作用的是单齿,通常只取一个轮齿作为分析对象,这样作可以大大节省计算机内存。考虑到轮齿应力在齿根过渡圆角和靠近齿面处变化较大,网格可划分得密一些。在进行疏密不同网格划分操作时可采用ANSYS提供的网格细化工具调整网格的疏密,也可采用分块建模法设置网格疏密度。 图1所示即为采用分块建模法进行网格划分。图1(a)为内燃机中重要运动零件连杆的有限元应力分析图,由于连杆结构对称于其摆动的中间平面,其厚度方向的尺寸远小于长度方向的尺寸,且载荷沿厚度方向近似均匀分布,故可按平面应力分析处 38 煤 矿 机 械 2005年第1期
网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量
网格数量直接影响计算精度和计算时耗,网格数量增加会提高计算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小
CATIA有限元高级划分网格教程
CATIA有限元高级网格划分教程 盛选禹李明志 1.1进入高级网格划分工作台 (1)打开例题中的文件Sample01.CATPart。 (2)点击主菜单中的【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具),就进入【Advanced Meshing Tools】(高级网格划分工具)工作台,如图1-1所示。进入工作台后,生成一个新的分析文件,并且显示一个【New Analysis Case】(新分析算题)对话框,如图1-2所示。 图1-1【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具)(3)在【New Analysis Case】(新分析算题)对话框内选择【Static Analysis】(静力分析)选项。如果以后打开该对话框的时候均希望是计算静力分析,可以把对话框内的【Keep as default starting analysis case】(在开始时保持为默认选项)勾选。这样,下次进入本工作台时,将自动选择静力分析。 (4)点击【新分析算题】对话框内的【确定】按钮,关闭对话框。 1.2定义曲面网格划分参数 本节说明如何定义一个曲面零件的网格类型和全局参数。 (1)点击【Meshing Method】(网格划分方法)工具栏内的【高级曲面划分】按钮
,如图1-3所示。需要在【Meshing Method】(网格划分方法)工具栏内点击中间按钮的下拉箭头才能够显示出【高级曲 面划分】按钮。 图1-2【New Analysis Case】(新分析算题)对话框图1-3【高级曲面划分】按钮
ANSYS结构有限元分析中的网格划分技术及其应用实例
一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD 模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据
有限元网格划分和收敛性
一、基本有限元网格概念 1.单元概述 几何体划分网格之前需要确定单元类型。 单元类型的选择应该根据分析类型、 形状特征、 计算数据特点、精度要求和计算的硬件条件等因素综合考虑。 为适应特殊的分析对象和边界 条件,一些问题需要采用多种单元进行组合建模。 2?单元分类 选择单元首先需要明确单元的类型,在结构中主要有以下一些单元类型: 平面应力单元、 平面应变单元、轴对称实体单元、空间实体单元、板 单元、壳单元、轴对称壳单元、杆单 元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不 同的分类方法,上述单元可以分成以 下不同的形式。 3. 按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。 一维单元的网格为一条直线或者曲线。 直线表示由两个节点确定的线性单元。 曲线代表 由两个以上的节点确定的高次单元, 或者由具有确定形状的线性单元。 杆单元、梁单元和轴 对称壳单元属于一维单元,如图 1?图 3所示。 二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸。这类单元包括平面单元、 轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图 4所示。二 维单元的形状通 常具有三角形和四边形两种, 在使用自动网格剖分时, 这类单元要求的几何形状是表面模型 图1捋果詰柯与一维杆单无犠型(直豉) &2桁舉第构石一隼杆早死撲型(曲线) B3毀姑构与一纯梁单元除世(直疑和呦疚〕
或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。
洞丨伍金哉钩和潯壳社电 三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元 包括空间实体单元和厚壳单元,如图5所示。在自动网格划分时,它要求的是几何模型是实 体模型(厚壳单元是曲面也可以)。 图5三址乙勺久和父侬草无 4. 按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次 单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面。这类单元的优点是节点数量少,在精度要求不高或者结果数据梯度不太大 的情况下,采用线性单元可以得到较小的模型规模。但是由于单元位移函数是线性的,单元 着应力突变,如图6所示。 S6錢41吕节点点单无fu节庖实体羊元
ANSYS 网格划分方法总结
(1) 网格划分定义:实体模型是无法直接用来进行有限元计算得,故需对它进行网格划分以生成有限元模型。有限元模型是实际结构和物质的数学表示方法。 在ANSYS中,可以用单元来对实体模型进行划分,以产生有限元模型,这个过程称作实体模型的网格化。本质上对实体模型进行网格划分也就是用一个个单元将实体模型划分成众多子区域。这些子区域(单元),是有属性的,也就是前面设置的单元属性。 另外也可以直接利用单元和节点生成有限元模型。 实体模型进行网格划分就是用一个个单元将实体模型划分成众多子区域(单元)。 (2)为什么我选用plane55这个四边形单元后,仍可以把实体模型划分成三角 形区域集合??? 答案:ansys为面模型的划分只提供三角形单元和四边形单元,为体单元只提供四面体单元和六面体单元。不管你选择的单元是多少个节点,只要是2D单元,肯定构成一个四边形或者是三角形,绝对没有五、六边形等特殊形状。网格划分也就是用所选单元将实体模型划分成众多三角形单元和四边形子区域。 见下面的plane77/78/55都是节点数目大于4的,但都是通过各种插值或者是合并的方式形成一个四边形或者三角形。 所以不管你选择什么单元,只要是对面的划分,meshtool上的划分类型设置就只有tri和quad两种选择。 如果这个单元只构成三角形,例如plane35,则无论你在meshtool上划分设置时tri还是quad,划分出的结果都是三角形。
所以在选用plane55单元,而划分的是采用tri划分时,就会把两个点合并为一个点。如上图的plane55,下面是plane单元的节点组成,可见每一个单元上都有两个节点标号相同,表明两个节点是重合的。 。 同样在采用plane77 单元,进行tri划分时,会有三个节点重合。这里不再一一列出。(3)如何使用在线帮助: 点击对话框中的help,例如你想了解plane35的相关属性,你可以
有限元网格剖分方法概述
有限元网格剖分方法概述 在采用有限元法进行结构分析时,首先必须对结构进行离散,形成有限元网格,并给出与此网格相应的各种信息,如单元信息、节点坐标、材料信息、约束信息和荷载信息等等,是一项十分复杂、艰巨的工作。如果采用人工方法离散对象和处理计算结果,势必费力、费时且极易出错,尤其当分析模型复杂时,采用人工方法甚至很难进行,这将严重影响高级有限元分析程序的推广和使用。因此,开展自动离散对象及结果的计算机可视化显示的研究是一项重要而紧迫的任务。 有限元网格生成技术发展到现在, 已经出现了大量的不同实现方法,列举如下: 映射法 映射法是一种半自动网格生成方法,根据映射函数的不同,主要可分为超限映射和等参映射。因前一种映射在几何逼近精度上比后一种高,故被广泛采用。映射法的基本思想是:在简单区域内采用某种映射函数构造简单区域的边界点和内点,并按某种规则连接结点构成网格单元。也就是根据形体边界的参数方程,利用映射函数,把参数空间内单元正方形或单元三角形(对于三维问题是单元立方体或单元四面体)的网格映射到欧氏空间,从而生成实际的网格。这种方法的主要步骤是,首先人为地把分析域分成一个个简单可映射的子域,每个子域为三角形或四边形,然后根据网格密度的需要,定义每个子域边界上的节点数,再根据这些信息,利用映射函数划分网格。 这种网格控制机理有以下几个缺点: (1)它不是完全面向几何特征的,很难完成自动化,尤其是对于3D区域。 (2)它是通过低维点来生成高维单元。例如,在2D问题中,先定义映射边界上的点数,然后形成平面单元。这对于单元的定位,尤其是对于远离映射边界的单元的定位,是十分困难的,使得对局部的控制能力下降。 (3)各映射块之间的网格密度相互影响程度很大。也就是说,改变某一映射块的网格密度,其它各映射块的网格都要做相应的调整。 其优点是:由于概念明确,方法简单,单元性能较好,对规则均一的区域,适用性很强,因此得到了较大的发展,并在一些商用软件如ANSYS等得到应用。 2 。拓扑分解法 拓扑分解法较其它方法发展较晚, 它首先是由Wordenwaber提出来的。该方法假设最后网格顶点全部由目标边界顶点组成, 那么可以用一种三角化算法将目标用尽量少的三角形完全分割覆盖。这些三角形主要是由目标的拓扑结构决定, 这样目标的复杂拓扑结构被分解成简单的三角形拓扑结构。该方法生成的网格一般相当粗糙, 必须与其它方法相结合, 通过网格加密等过程, 才能生成合适的网格。该方法后来被发展为普遍使用的目标初始三角化算法, 用来实现从实体表述到初始三角化表述的自动化转换。 单一的拓扑分解法因只依赖于几何体的拓扑结构使网格剖分不理想,有时甚至很差。 3.连接节点法 这类方法一般包括二步:区域内布点及其三角化。早期的方法通常是先在区域内布点, 然后再将它们联成三角形或四面体, 在三角化过程中, 对所生成的单元形状难于控制。随着Delaunay三角化(简称为DT ) 方法的出现, 该类方法已成为目前三大最流行的全自动网格生成方法之一。 DT法的基本原理:任意给定N个平面点Pi(i=1,2,…,N)构成的点集为S,称满足下列条件的点集Vi为Voronoi多边形。其中,Vi满足下列条件: Vi ={ X:|X- Pi|(|X- Pj|,X(R2,i(j,j=1,2,…,N }Vi为凸多边形,称{ Vi}mi=1为Dirichlet Tesselation
有限元网格划分和收敛性
一、基本有限元网格概念 1.单元概述?几何体划分网格之前需要确定单元类型.单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。? 2.单元分类选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不同的分类方法,上述单元可以分成以下不同的形式。?3。按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。?一维单元的网格为一条直线或者曲线。直线表示由两个节点确定的线性单元。曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。 ?二维单元的网 格是一个平面或者曲面,它没有厚度方向的尺寸.这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。
??三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示.在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。 ? 4.按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面.这类单元的优点是节点数量少,在精度要求不高或者结果数据梯度不太大的情况下,采用线性单元可以得到较小的模型规模.但是由于单元位移函数是线性的,单元内的位移呈线性变化,而应力是常数,因此会造成单元间的应力不连续,单元边界上存在着应力突变,如图6所示。
ANSYS有限元分析中的网格划分
ANSYS有限元分析中的网格划分 有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 作者: 张洪才 关键字: CAE ANSYS 网格划分有限元 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 图1 位移精度和计算时间随网格数量的变化 图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随
有限元网格划分及发展趋势
有限元网格划分及发展趋势 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。关键词:有限元网格划分;映射法;基于栅格法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 作为有限元走向工程应用枢纽的有限元网格划分,是有限元法的一个非常重要的研究领域,经历了40多年的发展历程。有限元网格划分算法研究中的某些难点问题始终未能得到真正意义上的解决,它们的解决对工程问题具有重要的现实价值和理论意义。有限元分析的基本过程可分为三个阶段:有限元模型的建立(即前处理)、有限元解算、结果处理和评定(即后处理)。根据经验,有限元分析各阶段所用的时间为】 【1:40%-45%用于模型的前处理,50%-55%用于后处理,而分析计算只占5%左右;更有文献】 【2指出有限元建模占有限元分析一半以上的工作量,甚至高达80%。因此,有限元分析的前后处理一直都是有限元分析的瓶颈问题,严重地阻碍着有限元分析技术的应用和发展。 许多学者对有限元网格生成方法近30年的研究进行了概括和总结】 【4。近年来,【3,对某些重要分支领域的研究进展方面也做出了贡献】 有限元网格生成方法研究有两个显著特点:(1)经历了一个进化过程,一些方法的研究与应用出现停滞,而另外一些方法在不断地深入、完善和发展,成为适应性强、应用范围广泛的通用方法;(2)领域和主题在不断扩展和深入,研究重点由二维平面问题转移到三维曲面和三维实体问题,从三角形、四面体网格自动生成转移到四边形、六面体网格自动生成。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,
有限元网格划分方法与基本原理
结构有限元分析中的网格划分技术及其应用实例 结构有限元分析中的网格划分是否直接关系到解算的效果。本文简述了网格划分应用的基本理论,并以空间自由曲面覆盖件和大型整体网络钢筋壳体产品的有限元分析中的网格划分为实例对象,详细讲述了空间自由和三维实体的网格划分基本理论及其在工程中的实际应用,非常具有现实意义和借鉴价值。 一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而 CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠 CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距 CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、 SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据交
ANSYS有限元网格划分的基本要点
ANSYS有限元网格划分的基本要点 1引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以
最新ANSYS有限元网格划分的基本原则汇总
A N S Y S有限元网格划 分的基本原则
ANSYS有限元网格划分的基本原则 发表时间:2009-4-3 作者: 张洪才 关键字: CAE ANSYS 网格划分有限元 有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。 从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。 在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。 在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D 单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。
有限元网格划分
本文讨论了有限元网格的重要概念,包括单元的分类、有限元误差的分类与影响因素;并讨论分析结果的收敛性控制方法,并由实例说明了网格质量及收敛性对取得准确分析结果的重要性。同时讨论了一些重要网格控制的建议及其他网格设定的说明。 一、基本有限元网格概念 1.单元概述 几何体划分网格之前需要确定单元类型。单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。 2.单元分类 选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不同的分类方法,上述单元可以分成以下不同的形式。 3.按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。 一维单元的网格为一条直线或者曲线。直线表示由两个节点确定的线性单元。曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。
二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸。这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。 三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示。在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。 4.按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面。这类单元的优点是节点数量少,在精度要求不高或