workbench刚柔耦合动力学分析
原创:一个急回机构的刚柔混合的瞬态动力学分析,正在研究这个新的功能。给大伙介绍一下简单的操作过程和应该注意的事项。大家一起进步,对于其中的不足大伙可以指出来,见笑了。
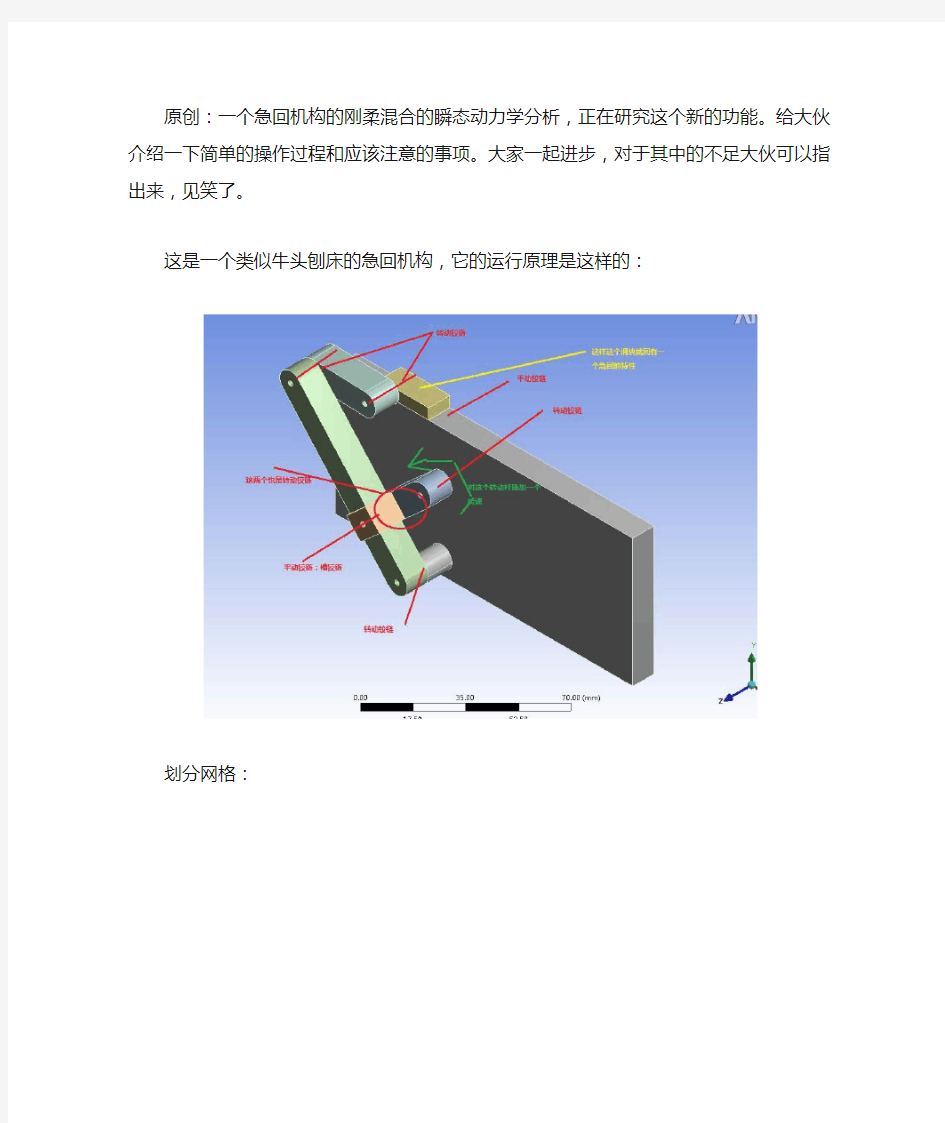
这是一个类似牛头刨床的急回机构,它的运行原理是这样的:
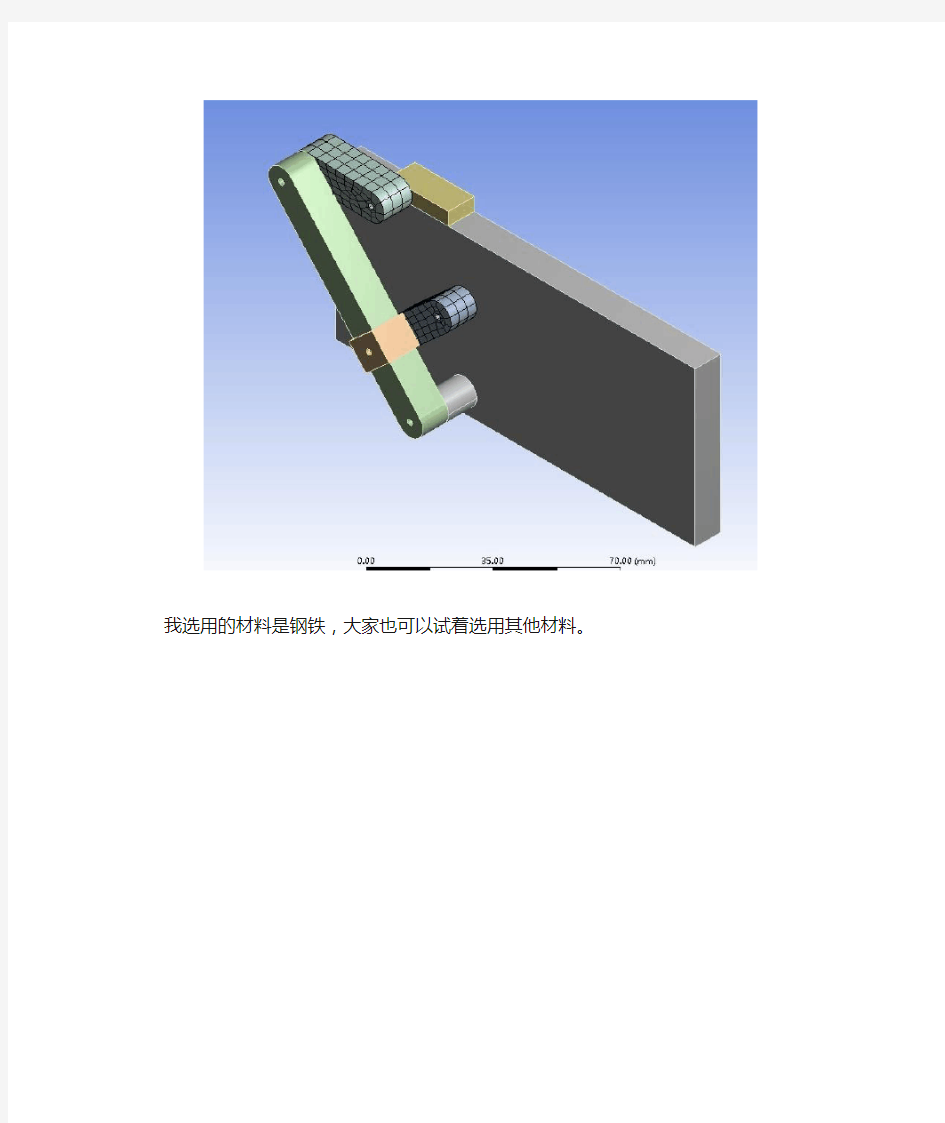
划分网格:
我选用的材料是钢铁,大家也可以试着选用其他材料。
第一个转动铰链,其实无所谓第几个,没有先后顺序。只要最后全满足条件即可。这里值得注意点是。转动铰链对ROTZ没有约束,所以操作的时候一定要注意当前的坐标系Z轴的方
向和实际情况相符,如果不一致要修改坐标系。具体如下:
点这个后,再点:RX,就是绕着X轴旋转的意思。类似经典界面的WPROTAT,命令
我们转动合理的角度后就完成了一个转动铰链。
其他的就不说了,下面说下平动铰链
平动铰链不约束X 方向的平动。和上面类似,把X轴指向你要确定方向即可。如图:
另外那个槽铰链也是如此,最后别忘了让机架接地固结。
然后施加转速,我这里用的是一秒钟一转。
然后施加一个50N(不一定是这个数值)的力在滑块上,记住,滑块定义的是刚体,不能施加力载荷,这里用的是joint-load选项,这个我还没琢磨透。DOF选择X方向type :详细栏里选择force
剩下就是载荷步设置了:
求解!!!!
结果变形
等效弹性应变
滑块X轴的最大加速度等结果
大家可以仔细观察:在转动的某个时刻,这几个地方的变形还是符合我们的尝试的。好了,
就这样。不足请指出。谢谢大伙儿
21ADAMS柔性体-刚柔耦合模块详解
ADAMS柔性体-刚柔耦合模块 一、ADAMS柔性体理论 1、ADAMS研究体系: a)刚体多体系统(低速运动) b)柔性多体系统(考虑弹性变形,大轻薄,高速) c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型) 大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。 但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。 2、柔性体 柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。 对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。 ………… 3、模态 谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。 利用有限元技术,通过计算构件的自然频率和对应的模态,按照模态理论,将构件产生的变形看作是由构件模态通过线性计算得到的。在计算构建模态时,按照有限元理论,首先要将构件离散成一定数量的单元,单元数量越多,计算精度越高,单元之间通过共用一个节点来转递力的作用,在一个单元上的两个点之间可以产生相对位移,再通过单元的材料属性,进一步计算出构建的内应力和应变。 …………柔性体模态与有限元模态区别不同? …………约束模态? …………正交模态? ADAMS中建立柔性体的三种方法:离散柔性连接杆、ADAMS/ViewFlex模块生成mnf文件、FEA有限元软件输出mnf文件 二、离散柔性连接杆 1、定义:将一个构件离散成几段或者许多段小刚性构件,每个小刚性构件之间通过柔性梁连接,变形
ANSYS Workbench 显示动力学 质量块冲击薄板
ANSYS Workbench显示动力学质量块冲击薄板 案例分析: 本例模拟一立方体刚性质量块以速度300mm/s冲击一方形薄板的过程,立方体质量块的边长为20mm,方形薄板的边长为200mm,厚度为10mm,薄板材料为显式材料Steel1006,立方体材料为IRON-ARMCO,分析薄板在冲击载荷作用下的连续动态过程。 几何模型的建立 打开workbench,载入几何模型模块和显式动力学模块,生成的几何模型为显式分析做准备。 双击A2打开几何模型,在弹出的单位选择窗口选择长度单位为mm。
点亮xy工作平面,同时点击面对视图图标来确定一个比较方便建模的视角。 XY平面显示如下,可以开始进行XY二维平面内的几何建模操作。 切换到草图模式进行草图建模编辑。
点击Draw主目录条下面的Rectangle生成方形几何外形线。在坐标原点附近拖动鼠标形成一个方框草图。 对方框草图进行位置约束和几何尺寸的标定。假设薄板平面依坐标轴
对称,则每个边距离平行坐标轴的距离均为100mm。约束各条边界。 点击尺寸Dimensions主条目下面的General来标注几何尺寸。点击Y 坐标轴,按住Ctrl键,点选右侧线段,出现距离标注如下图。 依次标注其余三条线段的到平行坐标轴的距离,修改标准尺寸均为100mm,同时四条线段均为蓝色,说明线段均约束完全。
点击concept在下拉菜单中选择surfaces from sketches 点击SurfaceSK1,然后点亮xyplane下的Sketch1,在base objects后面点击apply确认。在SurfaceSK1右键generate生成几何面。 生成有有厚度的实体。点击create下拉菜单Extrude拉伸实体。
ansys和adams刚柔耦合详细步骤
ANSYS与ADAMS进行联合柔性仿真 基本思路:在ANSYS进行.mnf文件输出,然后把输出的.mnf文件输入ADAMS,进行零件更换。然后在ADAMS 进行加载约束,仿真,查看结果。 软件:ANSYS10,ADAMS 2007 R3 具体步骤: 一ANSYS输出.mnf柔性文件 1.1 建立单元 单元1:solid45 或者其他3D单元 单元2:MASS21,此单元只用于连接点单元 设置弹性模量,泊松比,密度3个参数 1.2导入模型(.x_t)或者建立模型 完成后,创建连接点,ANSYS要求必须是2或者2个以上的连接点
创建连接点:如下图,在下面2个圆柱孔的中心,注意是圆柱体的中心,不是某个面得中心,创建2个keypoints。具体方法,看个人而定。 1.3 划分单元 对体用3D单元划分,我选用meshtool方法
接下来设置real constants,这个参数设置,一定要到等到3D网格划分完后再设置 对MASS21 进行设置。
Real constant Set No. 要大于2,下面的值要非常小。 然后对连接点,即keypoints进行单元划分:先设置keypoints 属性,如下 然后划分单元,用meshtool, 对keypoints划分单元,结果如下如下图
1.4建立刚性区域 刚性区域都是节点=连接节点+刚柔接触的面上所有节点 在ANSYS里面,这一步,连接点为主节点,刚柔接触面上的所有节点为从节点首先得按如下2个图片进行主节点和从节点节点组合。(或者用循环语句也行)
1.4.1建立主节点component 选择1个主节点,即连接节点。 接下来
自主机器人研究报告
自主机器人研究总结报告 一、课题研究背景和意义 工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。在国际上,工业机器人技术日趋成熟,已经成为一种标准设备而得到工业界广泛应用,从而也形成了一批在国际上较有影响力的、著名的工业机器人公司,这些公司已经成为其所在地区的支柱性企业。在众多制造业领域中,应用工业机器人最广泛的领域是汽车及汽车零部件制造业。如在毛坯制造(冲压、压铸、锻造等)、机械加工、焊接、热处理、表面涂覆、上下料、装配、检测及仓库堆垛等作业中,机器人都已逐步取代了人工作业。 工业机器人在制造业的应用范围越来越广阔,其标准化、模块化、网络化和智能化的程度也越来越高,功能越来越强,并向着成套技术和装备的方向发展。工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化。在汽车领域,应用最广泛的是中载和重载机器人,因此开发具有较高负载能力的机器人意义更大。 二、课题研究的总体目标及完成情况
2.1 课题研究的总体目标、考核指标 2.1.1总体目标 开发出具有自主创新的点焊机器人及周边应用成套设备样机,解决机器人产业化过程中的机器人本体优化设计、基于网络的新型控制器技术、系统集成技术等关键技术问题,进行小批量生产,解决机器人产业制造中的加工工艺问题、制造精度问题和机器人整体制造成本降低问题,在此基础上进行产业化,并首先在奇瑞汽车生产线上进行示范应用,逐步形成中国的工业机器人品牌,促进我国新型工业机器人技术的应用和产业发展。同时制订和完善适合我国国情的安全规范和技术规范,在技术上创新,争取获得多项专利。 2.1.2 主要技术指标 其技术指标如下: (1)本体参数要求 在满足机械本体刚度、强度、转动惯量及一些其它技术参数的基础上选择结构简单、机身紧凑的机身设计,以满足轻量化、低成本及可维护性要求。具体参数范围要求如下:
刚柔耦合动力学的建模方法
第42卷第11期 2008年11月 上海交通大学学报 JOU RN AL O F SH AN G HA I JIA OT O N G U N IV ERSIT Y Vol.42No.11 Nov.2008 收稿日期:2007 10 08 基金项目:国家自然科学基金资助项目(10772113);高等学校博士学科点专项科研基金资助项目(20040248013) 作者简介:洪嘉振(1944 ),男,浙江宁波市人,教授,博士生导师,研究方向:多体系统动力学与控制.电话(T el.):021 ********; E mail:jzhong@s https://www.360docs.net/doc/a5110895.html,. 文章编号:1006 2467(2008)11 1922 05 刚柔耦合动力学的建模方法 洪嘉振, 刘铸永 (上海交通大学工程力学系,上海200240) 摘 要:对柔性多体系统动力学研究的若干阶段和研究现状进行回顾,对已有的刚柔耦合动力学建模方法进行总结.为了对已有的建模方法进行评价,提出了5项指标:科学性、通用性、识别性、兼容性和高效性,指出现有的建模方法尚无法满足工程实际应用的需要,应研究满足全部评价指标的刚柔耦合动力学建模方法.文中对今后柔性多体系统刚柔耦合动力学的几个研究方向进行展望,包括理论建模、计算方法和试验研究等方面. 关键词:刚柔耦合系统;动力学;建模方法;评价指标中图分类号:O 313 文献标识码:A Modeling Methods of Rigid Flexible Coupling Dynamics H ON G J ia z hen, L I U Zhu y ong (Department of Engineering M echanics,Shanghai Jiaotong Univ er sity,Shanghai 200240,China)Abstract:A brief review about several phases and present status o f flexible multi bo dy dynamics w as given and the ex isting m odeling m ethods o f r ig id flex ible coupling dynam ics w ere sum marized.Five indexes,in cluding scientific index,g eneral index,identifiable index,compatible index and efficient index ,w ere pro posed to evaluate the ex isted mo deling methods.It show s that the ex isted m odeling metho ds can no t satis fy the actual needs of eng ineer ing application and new modeling m ethod w hich satisfies all the evaluating index es should be inv estig ated.T he r esearch tar gets including modeling theor y,com putational methods and exper im ents w er e sugg ested for the rigid flexible co upling dynamics o f the flex ible multi body sys tems. Key words:rigid flex ible coupling sy stem s;dy nam ics;mo deling methods;evaluating index 柔性多体系统是指由多个刚体或柔性体通过一定方式相互连接构成的复杂系统,是多刚体系统动力学的自然延伸.考虑刚柔耦合效应的柔性多体系统动力学称之为刚柔耦合系统动力学,主要研究柔性体的变形与其大范围空间运动之间的相互作用或相互耦合,以及这种耦合所导致的动力学效应.这种耦合的相互作用是柔性多体系统动力学的本质特 征,使其动力学模型不仅区别于多刚体系统动力学,也区别于结构动力学.因此,柔性多体系统动力学是 与经典动力学、连续介质力学、现代控制理论及计算机技术紧密相联的一门新兴交叉学科[1 3],它对高技术、工业现代化和国防技术的发展具有重要的应用价值. 根据力学的基本原理,基于不同的建模方法,得
柔性机器人的动力学研究
柔性机器人的动力学研究 摘要:现代机械向高速、精密、轻型和低噪声等方向发展,为了提高机械产品的动态性能、工作品质,必须十分重视机构动力学的研究。特别对于高速运行的机器人,在外力与惯性力作用下,构件的弹性变形不可忽略,它不仅影响了机构的轨迹精 度和定位精度,破坏系统运行的稳定性和可靠性,同时降低了工作效率和整机的使用寿命。对有害动态响应的消减是机械动 力学研究的重要问题。本文以柔性机器人为例,阐述了柔性机器人动力学分析的研究现状及其发展趋势,对Lagrange法,有 限元法、变Newton-Euler方法、Kane方法等方法进行了详细阐述和比较为柔性机器人的控制和优化设计提供科学基础。 关键字:柔性机器人动力学Lagrange 变Newton-Eule方法Kane方法有限元法 Dynamics of Flexible Manipulators Name: Liu Fuxiu Student ID: 1211303007 (Mechanical Engineering of Guangxi University, Mechanical Design and Theory 12 research) Abstract:The modern machinery to speed, precision, lightweight, and low noise direction, in order to improve the dynamic performance and quality of work of mechanical products, Research into the dynamics must be attached great importance to institutions. Especially for high-speed operation of the robot, under the external force and inertial force, the elastic deformation member can not be ignored, it only affects the body path accuracy and positioning accuracy, destroy the stability and reliability of the system, while reducing the efficiency and whole life. Abatement of hazardous dynamic response is an important issue of mechanical dynamics. In this paper, flexible robot, for example, describes the flexible robot dynamics analysis of present situation and development trend of the Lagrange method, finite element method, variable Newton-Euler method, Kane method and other methods were described in detail and compared to the flexible robot control and optimize the design to provide a scientific basis. Keywords: flexible robot dynamics Lagrange Newton-Euler method FEM method Kane finite element method 1 引言 现代科学技术的发展和进步产生了机器人,机器人是机器进化和技术进步的必然结果,而机器人技术有促进生产力的发展。“机器人”源于捷克语“robota”,意思为工作。美国机器人协会对它的定义是:“机器人是一种可再编程的多功能操作机,可以用各种编程的动作完成多种作业,用于搬运材料、工件、工具和专用装置”。自从1959年的Unimation公司推出第一台工业机器人以来,各种机器人或机械手广泛运用于许多领域。它们可以替代人类劳动,完成各种精密、繁重环境恶劣,甚至是危险的任务。 机器人动力学主要研究机器人机构的动力学,机器人机构包括机械结构和驱动装置,它是机器人的本体,是机器人实现各种功能运动和操作任务的执行机构,也是机器人系统中的被控对象。对机器人动力学的研究,应该说,在机器人一出现就已经开始,且随着机器人技术的发展而不断地加以丰富和积累。机器人动力学与其他一般力学、机构动力学比较,它与现代控制技术和计算技术更为密切相关。设计机器人的控制系统,以及实时控制机器人本身的过程中,不可避免地要运用现代计算技术,因此对于动力学的研究必须适应现代计算技术,并需要解决一系列新的问题。如何合理有效地降低机器人的机构重量,成为削减机器人系统总重量的关键所在,近年来,国际竞争越来越激烈,用户在希望成本降低的同时,对机器人的精度、工作速度、负载能力也提出了越来越高的要求。然而,机构的惯性力和角速度的平方成正比,随着工作速度的不断提高,惯性力将成为柔性机械臂变形的主要影响因素。因此,必须尽可能精确地分析机器人在高速情况下的运动动力学特性,从而有效地提高其精度,以上诸多因素导致了柔性机器人及其设计理论的出现。
某火炮减速器刚柔耦合动力学仿真
某火炮减速器刚柔耦合动力学仿真 王炎,马吉胜 (军械工程学院 武器系统仿真研究所, 河北 石家庄 050003) 摘要:通过CATIA 与LMS https://www.360docs.net/doc/a5110895.html,b Motion 无缝接口实现了实体模型的数据导入。以多刚体动力学和柔性多体动力学理论为基础,建立了包含柔性轴和柔性箱体的方向机刚柔耦合虚拟样机模型。通过仿真分析了柔性体对齿轮啮合力的影响,得到了耦合作用下箱体及齿轮轴的应力和变形,为耦合动载工况下的减速器设计提供了理论依据。 关键词:啮合力;刚柔耦合;模态综合法;https://www.360docs.net/doc/a5110895.html,b Motion. 引言: 减速器是在原动机和工作机之间用于降低速度、增大扭矩的传动装置,其主要部件包括齿轮、轴、轴承和箱体等。减速器输出端啮合力往往很大,当箱体、轴材料刚度较小时,箱体、轴的柔性变形与输出齿轮啮合力的耦合作用不可忽略。某火炮方向减速器如图1所示,齿圈1固定不动,输出端齿轮2与齿圈1啮合带动整个减速器及炮塔绕齿圈1转动。输出端齿轮2采用悬臂梁结构,如果箱体和齿轮轴变形过大则使啮合振动更加恶劣,不能保证传动精度。在设计过程中为减轻减速器重量,欲将箱体由40CrNiMoA 改为ZL205。为探讨采用轻质箱体后,箱体、轴的柔性变形是否会使啮合振动显著增大,本文以柔性多体动力学理论为基础,综合考虑箱体、轴的变形与啮合力的耦合作用,建立了该减速器刚柔耦合动力学模型,通过分析耦合作用下载荷特性,以及箱体、轴动载下的应力和变形验证了减重设计方案的可行性,为箱体和轴等部件的选材及强度校核提供了理论依据。 图1 某火炮方向减速传动示意图 图2 齿轮扭转振动模型 1 啮合力模型 在减速器的虚拟样机建模过程中,难点在于啮合力模型的建立,在多体软件中,啮合力建模主要由以下两种模型: 1、基于齿轮参数的啮合力模型[1,2]。 该方法以齿轮系统动力学为基础,根据齿轮系统动力学中的运动方程,建立齿轮系统扭转振动模型如图2所示。根据牛顿定律可得这一系统的动力学模型: (())()(())p p p m p p g g p p p g g p I R C R R e t R K t f R R e t T θθθθθ????? +??+??= (1) (())()(())g g g m p p g g g p p g g g I R C R R e t R K t f R R e t T θθθθθ????? ??????=? (2) ()(())(())p p g g m p p g g F K t f R R e t C R R e t θθθθ??? =??+??啮合力 (3) 式中:,p g I I 为主、被动轮的转动惯量;,p g θθ为主,被动轮的扭转振动位移;,p g R R 为主、被动轮的基圆半径;()K t 为时变啮合刚度;,p g T T 为作用在主,被动轮上的外力矩;()e t 为齿轮传动误
机床动力学建模的拓展传递矩阵法
万方数据
万方数据
万方数据
万方数据
2010年11月吴文镜等:机床动力学建模的拓展传递矩阵法73 刀。Q=F(9)Q=E522'Jo+E623’10+E7乙110+ 毛毛.10+岛乞J0+Eloz7'j0+ 层Ilz8.10+层12磊.10+E13zF+E30zD(10) F=E14互.10+E15乞.10+巨6毛'lo+ 巨725’10+E18乙J0+E927'lo+ £20磊_lo+E2lz9.10+£22磊+E3l乞(11) 互.o=ElZ6.1+E227.I+E328.1+层429.1(12) 由式(7)~(11)得 (五oE5一E14)互Z2.o+(正oE6一E15)五z3.o+ (五oE7一E16)五乙.o+(五oE8一E17)毛z5.o+ (墨oE9一E18)r6瓦.1+(互oElo—E19)弓Z7.1+ (互oEll—E20)磊z8,1+(正。巨2一E21)写z9.1+ (7ioEl3一E22)z-+(7io岛。一百31)ZF=0(13) 由式(6)、(12)得 互,D(El乙,J+E227.1+E328.I+E4毛,1)=rl,』Z1.,(14)对于状态矢量磊'l、历'l、z8'1、而,1均为刚体1上的状态矢量,位移元素线性相关,有 易327.1=E24互,,(15) 易3磊,l=E25五,J(16) £2329.1=E26互.,(17)联合(13)~(17)将其写成矩阵的形式有 瓦lzalI=048×l(18)zall=(乏,o召。别,。罨。烈,。 z五磊。罨。z0砟磊)1 磊和Zo分别为激振点和拾振点的状态矢量,兀¨为48×69的高维矩阵。 3.2结合面参数 直线进给功能部件中主要存在直线滚动导轨结合面以及电动机定子与滑板之间的螺栓结合面。对于导轨结合面模型简化为1个法向线性弹簧一阻尼系统、1个横向的线性弹簧一阻尼系统和3个转动方向的扭转弹簧一阻尼系统,以综合反映结合部各方向的微幅振动。通过锤击试验分别测定导轨法向和横向及3个扭转方向的传递函数,定义法向为Z,横向为y,3个坐标轴分别为A、B、C。 根据单自南度系统振动方程计算出导轨各方向的接触刚度,根据半功率法计算接触阻尼。最终计算得到导轨结合面参数如表l所示。电动机与滑板之问的螺栓结合面参数如表2所示。导轨结合面参数测试结果见图7。 表l导轨结合部参数结果 参数数值 刚度kr/(MN?m‘1253 刚度kJ(GN?m“12.14 刚度“/(kN?m?rad。。1693 }94度ks/(MN?m?rad‘)1.73 刚度kd(kN?m?rad。1727 阻尼c;l(N?s?m“1641.5 阻尼cJ(N?s?m’)l034.9 雕尼“/(N?m?s?rad。)0.1447 阻尼c洲N?m?s?rad。。)2.011 阻尼Cc/(N?1tl?s?md1)09602 表2螺栓结合部参数 参数数值 刚度k,/(GN?m。。1o.25 刚度k,J(GN?m’)0,25 刚度kfl(GN?m。)2.10 阻尼c.r/(N?s?m。)125 阻尼e,I(N?s?m。。1125 阻尼c∥(N?s?m“)250 (a)测试现场 {||卜M以旷藩三h∥ 迎卜—t——专—上‘_妻蔫k套 图7导轨结合面参数测试结果 3.3滑板有限元自由度缩减模型建-fr 创建有限元自由度缩减模型首先采用通用有限元软件得到零件的有限元法(Finiteelementmethod,FEM)}-莫-型,根据零件特点选择质量集中点、 结合面连接节点、外力作用节点以及需要考察的节 万方数据
刚柔耦合仿真分析流程及要点
本文主要介绍使用SolidWorks、HyperMesh、ANSYS和ADAMS软件进行刚柔耦合动力学分析的主要步骤。 一、几何建模 在SolidWorks中建立几何模型,将模型调整到合适的姿态,保存。此模型的姿态不要改动,否则以后的MNF文件导入到ADAMS中装配起来麻烦。 二、ADAMS动力学仿真分析 将模型导入到ADAMS中进行动力学仿真分析。 为了方便三维模型的建立,SolidWorks中是将每个零件单独进行建模然后在装配模块中进行装配。这一特点导致三维模型导入到ADAMS软件后,每一个零件都是一个独立的part,由于工作装置三维模型比较复杂,因此part数目也就相应的比较多,这样就对仿真分析的进行产生不利影响。下面总结一下从三维建模软件SolidWorks导入到ADAMS中进行机构动力学仿真的要点。(1)首先在SolidWorks中得到装配体。(2)分析该装配体中,到底有几个构件。(3)分别隐藏其他构件而只保留一个构件,并把该构件导出为*.x_t 格式文件。(4)在ADAMS中依次导入各个*.x_t 文件,并注意是用part的形式导入的。(5)对各个构件重命名,并给定颜色,设置其质量属性。(6)对于产生相对运动的地方,建议先在此处创建一个marker,以方便后面的操作。否则,三维模型进入ADAMS后,线条繁多,在创建运动副的时候很难找到对应的点。 部件的导入如下图1所示: 图1 文件输入 File Type选择Parasolid; File To Read 找到相应的模型; 将Model Name 切换到Part Name,然后在输入框中右击,一次单击part →create 然后在弹出的新窗口中设置相应的Part Name,然后单击OK →OK 。将一个部件导入,重复以上步骤将部件依次导入。这里输入的技巧是将部件名称按顺序排列,如zpt_1、zpt_2、zpt_3. ,然后在图1中只需将zpt_1改为zpt_2、将PART_1改为PART_2即可。
刚柔耦合机械系统动力学仿真
№.3 陕西科技大学学报 J un.2006 ?74? J OU RNAL OF SHAANXI UN IV ERSIT Y OF SCIENCE &TECHNOLO GY Vol.24 3 文章编号:1000-5811(2006)03-0074-04 刚柔耦合机械系统动力学仿真 刘言松,曹巨江,张元莹 (陕西科技大学机电工程学院,陕西咸阳 712081) 摘 要:有限元技术和虚拟样机技术相结合,实现了对高速机械系统刚柔耦合的动力学仿真, 并以一个算例说明了该方法的可行性。 关键词:有限元技术;虚拟样机技术;刚柔耦合;动力学仿真 中图分类号:T H113 文献标识码:A 0 前言 机械系统的动力学分析与仿真是随着计算机技术的发展而不断成熟的,多体系统动力学是其理论基础。多体系统是指由多个物体通过运动副连接的复杂机械系统,多体系统动力学的根本目的是用计算机技术进行复杂机械系统的动力学分析与仿真。多体系统可分为多刚体系统和多柔体系统,前者是指对于低速运动的系统中的物体,由于其弹性变形不影响其大范围的运动特性,因此均被假定为刚体,后者是指在大型、轻质、高速的工况下,组成系统的物体的弹性变形直接影响了系统的运动特性,因而将所有或部分物体假定为柔性体。本文将研究如何利用有限元技术和虚拟样机技术实现刚柔耦合的机械系统的动力学仿真。 1 多柔体系统动力学方程的建立 建立如图1所示的多柔体的坐标系。e r 为惯性坐标系,e b 为动坐标系,前者不随时间变化,后者建立在柔性体上,用于描述柔性体的运动。e b 可以相对e r 进行有限的移动和转动,e b 在e r 中的坐标称为参考坐标。 图1 柔性体上节点P 的位置对于小变形的柔性体运动可以将其运动分解为:刚性运动——— 刚性转动———变形运动3个阶段。如图1,对于柔性体上的任意一 点P ,其位置向量为: r = r 0+A ( r p + u p )(1)式中,r 为P 点在惯性坐标系e r 中的向量,r 0为动坐标系e b 原点在 e r 中的向量,u p 为相对变形量,可以用模态坐标来描述: u p = Φp q f (2)式中,Φp 为点P 满足里兹基向量所要求的假设变形模态矩阵,q f 为变形的广义坐标。 柔性体的运动方程可以通过式(3)的拉格朗日方程导出:d d t 5 L 5 ξ-5 L 5ξ+5 Γ5ξ +5 Ψ5ξT λ- Q =0 Ψ=0 (3)式中:Ψ为约束方程;λ为对应约束方程的拉氏乘子;ξ为广义坐标,ξ=[x y z Ψθq i (i =1,…,M )]T =[r Ψq ]T ;q 为模态坐标;Q 为投影到ξ上的广义力;L 为拉格朗日项,L =T -W ,T 和W 分别表示动能和势 3收稿日期:2006-02-10 作者简介:刘言松(1975-),男,安徽省滁州市人,助教,硕士,研究方向:虚拟样机技术、机械动力学
国防科大的主要科研方向
1.计算流体力学与应用 主要开展飞行器气动布局及分析、非流动及动态特性研究、高精度数值计算方法研究、面向多体分离和物体变形引起流固耦合非定常流动问题的数值模拟方法和气动弹性等问题研究。 2.高超声速空气动力学主要开展高超声速飞行器一体化设计、高超声速气动力(热)预示方法、吸气式飞行器布局优化设计、再入飞行器气动光学效应、等离子体数值模拟方法、非平衡流动模拟方法及应用等方面的研究。 3.实验空气动力学与应用研究低跨超/高超声速空气动力气实验模拟技术与设备,包括超声速风洞和高超声速风洞的设计理论与技术,研究飞行器的气动力/气动热实验技术、飞行器流场结构先进的接触精细测试技术及其在工业军事上的应用。 4.飞行器结构分析与设计 本方向主要开展材料本构理论、断裂与损伤力学理论和界面力学理论,固体火箭发动机结构完整性分析与贮存寿命预估,线弹性、粘弹性、塑性材料和复合材料结构的动、静态响应与稳定性分析、优化与试验,结构振动控制技术,非线性动力学理论与应用等方面研究。 5.束能与电磁推进 主要研究吸气式脉冲激光爆震推力器数值模拟、太阳光热推力器高温陶瓷加热室制备、激光与放电烧蚀脉冲等离子体推力器等。
6.推进系统动态学与状态监控 主要研究可重复使用运载器推进系统故障诊断与健康监控、液体火箭发动机瞬变过程动力学建模与仿真、卫星推进系统故障诊断与自主管理等。 7.火箭发动机燃烧与流动主要研究火箭发动机燃烧稳定性、冲压流动与燃烧机理、合成射流与推力矢量控制、凝胶推进剂雾化与燃烧技术等。 8.飞行器总体设计技术本研究方向主要开展导弹、运载等飞行器的总体方案论证和多学科协同设计、精度分析与评估、航天器回收与航空救生技术等方面的研究。 9、飞行器总体技术 本研究方向重点开展高超声速飞行器总体一体化设计、飞行器布局优化设计及应用等方面的研究。 10、高超声速推进技术本研究方向主要开展超燃冲压发动机、发动机地面试验与飞行试验技术、高超声速飞行器机体/推进系统一体化设计、超声速燃烧与流动机理等方面的研究。 11、燃气引射技术本研究方向主要开展航空航天发动机高空模拟试验系统等方面的研究。
UM软件入门系列教程04:刚柔耦合动力学仿真-pub
目录 1.曲柄-滑块机构 (1) 1.1配置ANSYS工作环境 (3) 1.2准备连杆柔性体模型 (4) 1.2.1在ANSYS里的工作 (4) 1.2.2柔性子系统向导 (6) 1.3刚柔耦合系统动力学建模 (12) 1.3.1创建几何图形 (13) 1.3.2创建刚体 (15) 1.3.3创建柔性子系统 (16) 1.3.4创建铰 (17) 1.4刚柔耦合系统动力学仿真 (20) 2.柔性平台-电机模型 (26) 2.1准备柔性平台 (27) 2.1.1在ANSYS环境里工作 (28) 2.1.2在ANSYS Workbench环境里工作 (29) 2.1.3柔性子系统向导 (36) 2.2刚柔耦合系统动力学建模与仿真 (37) 2.2.1导入柔性平台 (37) 2.2.2连接柔性平台与大地 (38) 2.2.3创建几何图形 (38) 2.2.4创建力元 (42) 2.2.5导入电机子系统 (45) 2.2.6设置电机转子速度曲线 (47) 2.2.7连接电机与柔性平台 (49) 2.2.8计算系统平衡位置和固有频率 (51) 2.2.9运动仿真 (53)
1.曲柄-滑块机构 本例模型为一个曲柄-滑块机构,如图 1.1所示。在{UM Data}\SAMPLES\ Flex目录有一个名为slider_crank_all的模型。这个模型里共有三个曲柄-滑块机构,其不同之处在于构件连杆的建模方式: ?连杆为一个刚体; ?连杆为一个子系统,由11个刚体通过铰和力元连接而成; ?连杆为一个柔性体,从有限元软件导入。 图1.1 曲柄-滑块机构:1-机架,2-曲柄,3-连杆,4-滑块 这里主要介绍第三个模型——刚柔耦合机构的建模流程: 1.建立连杆的有限元模型; 2.计算所需的模态,并转换保存为UM格式; 3.创建几何图形; 4.创建刚体(曲柄和滑块); 5.导入连杆弹性体; 6.创建铰和力元。 前两步在ANSYS里进行,后面四步在UM软件里进行。 备注:UM使用子系统技术处理外部导入的柔性体,每个柔性体都是一个独立的子系统,导入时选择Linear FEM Subsystem类型。 我们可以先创建一个工作目录,方便后续模型使用,如:{UM Data}\My Models,或者D:\models。 以下以“.\”来表示工作目录。在这个目录下我们再创建两个子文件夹:?flexbeam:存放柔性体数据; ?slider_crank_fem,存放刚柔耦合模型。
Workbench心得——行星齿轮瞬态动力学分析
然后我们就需要对模型添加约束和连接,主要包括有 看下面 详述。在这里首先将三角形的齿轮架给刚化, 因为整个分析中不考虑它的影响, 主要 首先拿到模型可以看出这里是个行星轮结构。 考虑 齿轮之间的作用。 joints 禾口 frictionl ess con tacts ,添加完的效果如图。添加过程请
首先添加三个类似的运动副,都是需要Body-Ground形式。第一个添加太阳轮的旋转副。revolute joint 。Body-ground。
再添加三角架的旋转副。revolute joint 。Body-ground。
CAEm Mttric Jmm, kq, "4,気 mV, nrA) Degrees 再添加内齿圈的固定副。 fixed joint 。Body-ground 。 Filr- Fdrt Vtew UniE Toe i Hetp Q 专皿砖甸tl 诡冏因?)▼ —t 1臂斤胃A IB O 1? ■胡▼ 二屮毀題■软匹q ci.罠-科 h 営how "i/rrticr 1! W^e+fBrw ■ Edg@ "応ring 寿 〒 X T J X * 1*1 HEldwn AnnetiiiciM E 品切 li lu^iiLL^r ?'urd 呼 备肚血 Sody * AR EudL 川5帕 h b 匸 ewv&tiym :| K * Qu0mc ji] PT?|?r R jSl Gffnffle4r/ ± "Au 匚□nrtrtaiE 1 S?fcT*ms U 丿谢 匚汕neetm-s 0# 麵 iwi b - 毎-寸夸 & ^du * ?-(jTDUTd Ta E 「29] (±--^3 R E .?cki ■* - Gi QLjnd Tn F [±3] 匹、坤 I 亠 JP and 1? A [40] 占"电 *3111 2 舟Y 爷 & -FT4U 兀亍PK 审I Ccnlacb ?* Fl*KJbElhlE£? 【勒 To SL+lj. Y X 1=低凶理毋?BI] web 1 r-a n-Meaiii [B5] t .亘 intel Ccriil 口r -卉di 也W 用卜Srlifch 弼 遵伞JcH *阴tabard 帕Pty 刁片垫 Solution LB6J …> _Ll 女Ld 即"n\ “上li* i ; 昨 Ew .-ilk i 【9b Conrect]?i Type Ecdy-
基于刚柔耦合模型对动力学的分析
基于刚柔耦合模型对动力学的分析 【摘要】本文基于国内某高速列车,分别建立其多刚体和刚柔耦合动力学模型,通过计算两种模型的动力学指标,分析车体弹性振动对车辆系统动力学的影响。 【关键词】高速列车;刚柔耦合模型;车辆系统动力学 1 前言 当今高速列车发展主要围绕高速化和轻量化这两大主题展开。由此引发的问题也伴随而来:一方面,当列车行驶速度升高时,轨道的激扰频率会随之升高,而另一方面车体逐步轻量化也导致车辆结构本身刚度的下降,因此减低了车辆结构本身的自振频率,更容易在高频激扰下发生共振,从而恶化高速列车的动力学性能。但传统的车辆动力学分析中,将车辆系统考虑成多刚体,无法考察高速列车部件结构振动对动力学性能的影响。本文基于国内某高速列车分别建立多刚体和刚柔耦合动力学模型,计算分析车体弹性振动对车辆系统动力学的影响。 2 模型建立 轨道车辆实际是一个复杂的弹性多自由度振动系统,通过仿真的方法完整描述出动力学特性是不可能的,因此在对其进行动力学分析时,需要建立一个相对简化的多体动力学模型。本文以某高速列车为研究对象,分别建立其多刚体和车体为弹性体的刚柔耦合系统模型。 3 动力学指标对比分析 本文中利用国家针对车辆系统动力学性能评定的相关标准及规定,在SIMPACK中对所建的两种车辆系统模型的各项动力学性能指标进行计算分析,总结两者之间的差异。 3.1 运行稳定性指标对比分析 图1 580km/h、581km/h时多刚体模型各轮对横向位移 通过图1可以发现,多刚体模型中当车辆运行速度为580km/h时,当车辆系统通过一段有激扰的轨道谱后,各轮对的横向位移量很快衰减,而当车辆以581km/h的速度运行时,通过有激扰路段后,各位轮对的横向位移量出现等幅振荡现象,则多刚体车辆系统模型在580km/h达到临界速度。 图2 534km/h、535km/h时刚柔耦合各轮对横向位移 通过图2发现刚柔耦合车辆系统模型在534km/h时达到临界速度。通过以上
LMS Virtual Lab学习心得之刚柔耦合分析详细流程
刚柔耦合分析详细流程 主要内容: 1)零件重新网格划分; 2)材料和属性的设置; 3)刚体的替代; 4)Rigid Spider的建立; 5)柔性体Craig-Bampton模态计算; 以satellite为例,刚体模型建立完毕,进行计算,保存为satellite.CATAnalysis。 ●将需设置成柔性体的零件在新窗口打开,此时默认进入几何设计模块(Geometry)。 ●进入网格划分模块:开始->Meshing->CAD meshing模块,对零件进行网格划分。一般先 进行surface mesh(点击Advanced surface mesher,选择零件),然后进行3D网格划分(点击Tetrahedron,选择面网格),采用四面体进行填充。此时,必须将Surface网格Deactivate(在特征树中选择Advanced Surface mesh,右键单击,选择Deactivate),因为分析中用不到2D网格,激活的2D网格由于缺少材料属性会使模态计算失败,切勿忘记。
进入Structure->Finite Element Analysis Pre/Post->Materials&Properties,进行零件材料和网格属性的设置:新建一个Isotropic Material,设置杨氏模量、泊松比和密度等基本参数;新建一个Solid Property,Application Region选择该3D网格(可在特征树中选择Tetrahedron Filler Mesh),Material选择刚才建立的Isotropic Material。
●保存该分析为Flex.CATAnalysis。 ●不要关闭Flex.CATAnalysis(最小化即可),进入satellite.CATAnalysis分析文件,用上面柔 性体分析文件替换刚体:选择要被替换的刚体,右键单击,选择:显示->Flex->Make Flexible with Existing Data,在弹出的对话框中选择Flex.CATAnalysis文件,此时该刚体被
基于刚柔耦合多体动力学的叉车推出器载荷及强度分析
基于刚柔耦合多体动力学的叉车推出器分析 汪谟清周齐齐李戈操 安徽合力股份有限公司技术开发处合肥230022 摘 要:叉车属具的形式多种多样,而且结构相对复杂,设计人员通过手工计算这些复杂的受力情况显得力不从心。MotionView是通用的多体动力学仿真软件,利用MotionView的刚柔耦合技术对叉车推出器的运动机构进行动力学仿真分析,得到推出器杆件的受力情况,并由杆件受力值得出有限元分析结果。 关键词:叉车,属具,推出器,多体动力学,MotionView 1 引言 叉车在工作过程中为了完成特定的工作任务,往往需要配置不同的属具,而叉车推出器是叉车属具中的一种,主要进行推拉货物的工作。由于推出器结构杆件比较多,运动连接关系比较复杂,采用手工计算各杆件的受力情况的方法显得很困难,通过MotionView多体动力学仿真软件可以较好的解决该问题。 目前,多体动力学仿真系统分为多刚体仿真系统和刚柔耦合仿真系统,叉车推出器结构比较复杂,采用多刚体仿真系统时,必须认真校核各个杆件之间的连接关系,否则在连接处会出现过约束的情况,当模型一旦很大,检查过约束是比较困难的。采用刚柔耦合仿真系统可以较好的解决这些问题。 MotionView对柔性体系统来说是一个强大的前后处理器,可以使用OptiStruct很容易的生成柔性体模型,并能容易的将其与刚形体组合到一起进行多体动力学分析。 2 叉车推出器模型的建立 在机械动力学系统中,系统本身的质量、质心、转动惯量等决定了系统的特性,所以导入的模型必须保证这些参数的正确性,由于叉车推出器模型结构复杂,杆件数量较多,直接将推出器CAD模型导入到MotionView中往往使得杆件的质量中心位置混乱,因此在HyperMesh中建立有限元模型并赋予材料和属性,通过fem文件导入到MotionView中,这样就解决了质量中心位置混乱的问题。与此同时多体动力学分析得出的受力结果文件,在OptiStruct中进行有限元分析时同样需要。 HyperMesh中建立的有限元模型导入MotionView时必须统一两者之间的单位。在HyperMesh中建立的有限元模型如下图1所示: