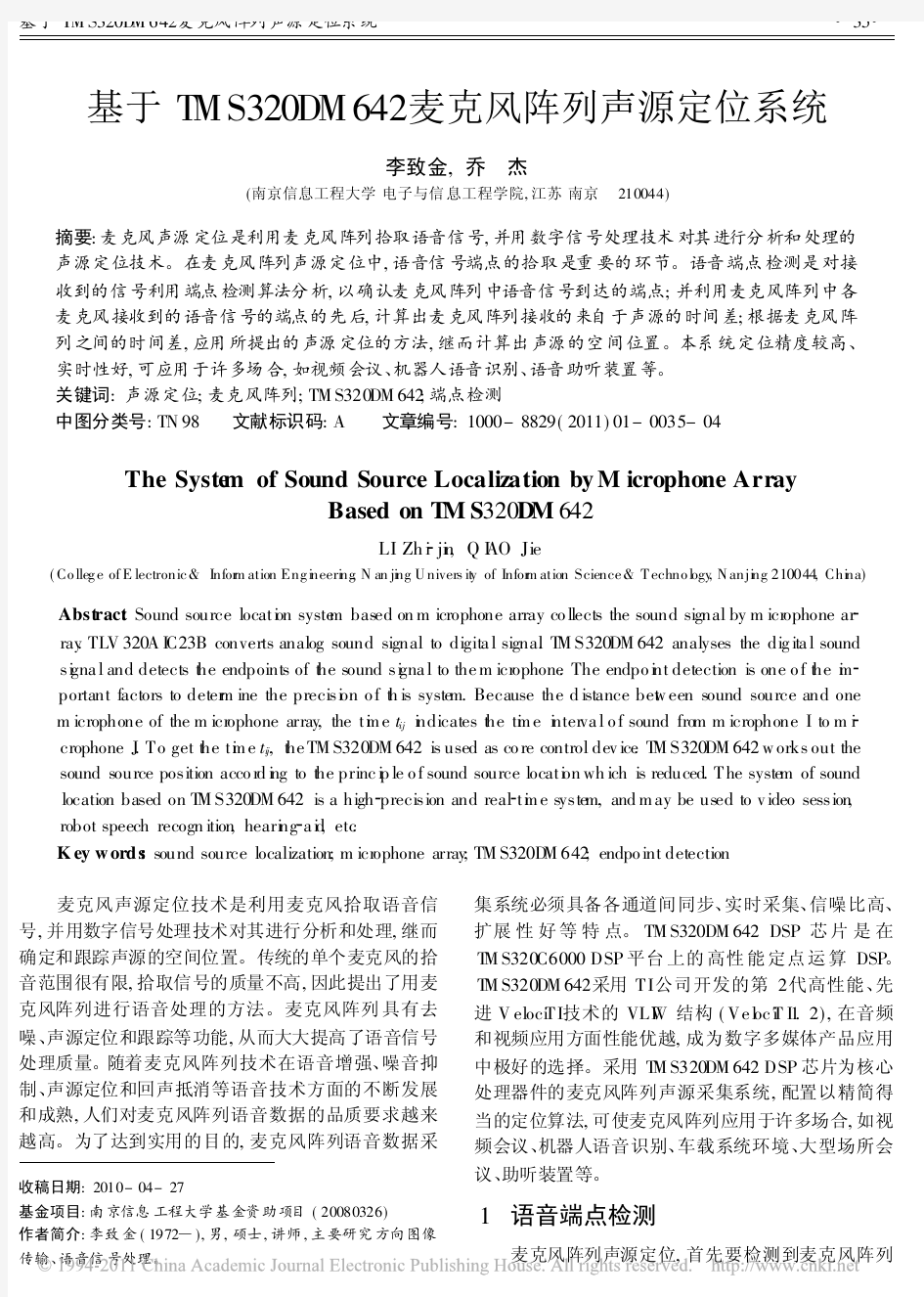
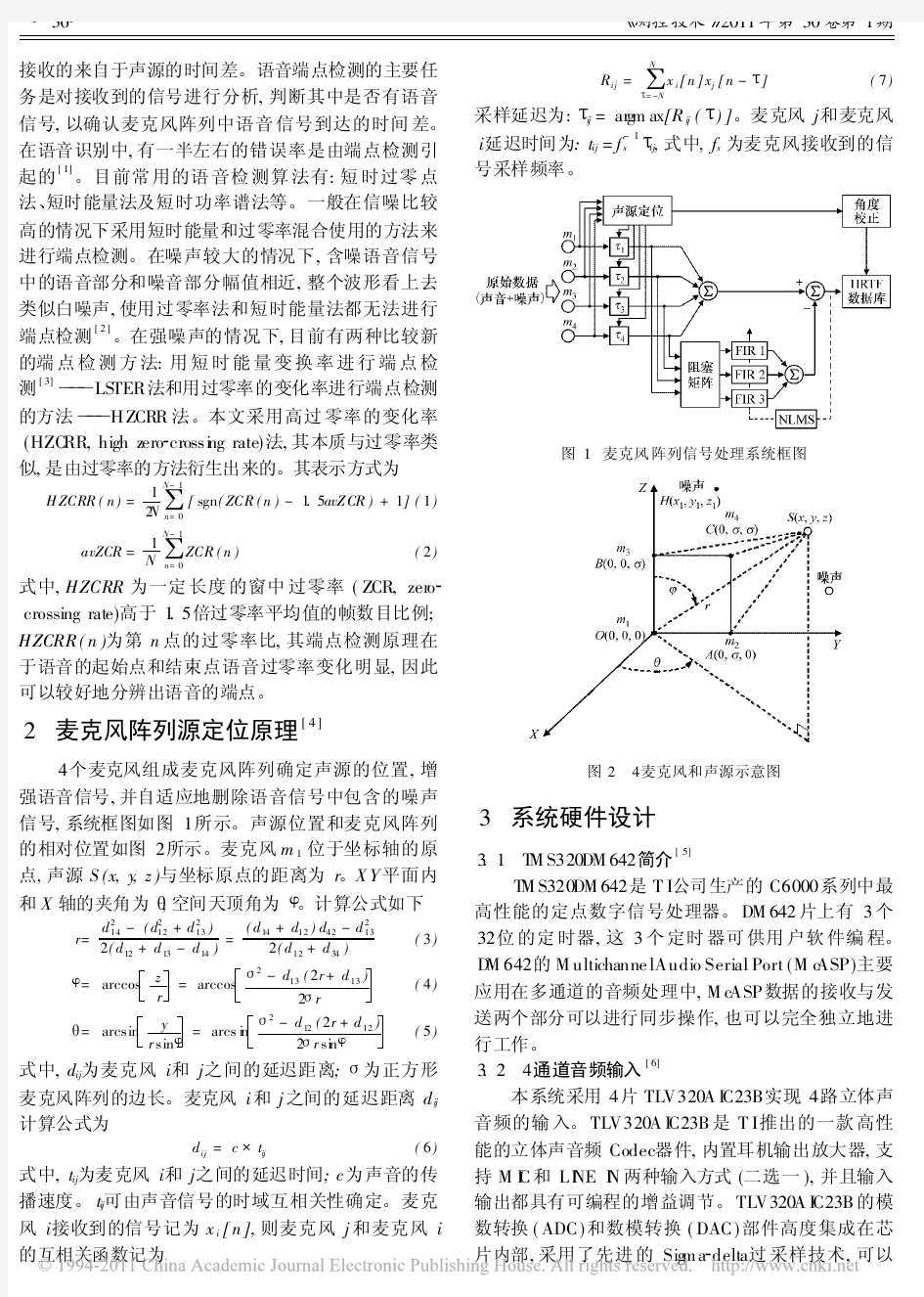
麦克风阵列声源定位系统
基于麦克风阵列的语音增强方法
基于麦克风阵列的语音增强方法 概述:在日常生活和工作中,语音通信是人与人之间互相传递信息沟通不可缺少的方式。在语音通信中,语音信号不可避免地会受到来自周围环境和传输媒介的外部噪声、通信设备的内部噪声及其他讲话者的干扰。这些干扰共同作用,最终使听者获得的是被噪声污染过的带噪声语音,严重影响了双方之间的交流。应用阵列信号处理技术的麦克风阵列能够充分利用语音信号的空时信息,具有灵活的波束控制、较高的空间分辨率、高的信号增益与较强的抗干扰能力等特点,逐渐成为强噪声环境中语音增强的研究热点。本文将介绍各种麦克风阵列语音增强方法,并总结各个方法的优劣。最终得出更好的、能够去噪的基于麦克风阵列的语音增强方法。 1麦克风阵列 麦克风阵列是将两个麦克风的信号耦合为一个信号。在频率响应中也可以根据时域中波束形成与空间滤波器相仿的应用,分析出接收到语音信号音源的方向以及其变化。采用该技术,能利用两个麦克风接收到声波的相位之间的差异对声波进行过滤,能最大限度将环境背景声音滤掉,只剩下需要的声波。对于在嘈杂的环境下使用采用了这种配置的设备,在嘈杂的环境下能使听者听起来很清晰,没杂音。 2基于麦克风阵列的语音增强方法 2.1基于自适应波束形成器的麦克风阵列语音增强 自适应波束形成是现在广泛使用的一类麦克风阵列语音增强方法。最早出现的自适应波束形成算法,其基本思想是在某方向有用信号的增益一定的前提下,使阵列输出信号的功率最小。在线性约束最小方差自适应波束形成器的基础上,1982 年Griffiths 和Jim 提出了广义旁瓣消除器成为了许多算法的基本框架。 广义旁瓣消除器(GSC)的工作原理是带噪声的语音信号同时通过自适应通道和非自适应通道,自适应通道中的阻塞矩阵将有用信号滤除后产生仅包含多通道噪声参考信号,自适应滤波器根据这个参考信号得到噪声估计,最后由这个被估计的噪声抵消非自适应通道中的噪声分量,从而得到有用的纯净语音信号。 麦克风阵列的自适应算法通过迭代运算获取波束形成的最优权矢量时,噪声模型的估计是一个非常关键的因素。它的好坏直接影响着系统波束形成的性能。系统地分析了最小均方( LMS) 自适应语音增强算法,并针对阻塞矩阵在估计噪声时存在的缺陷,在该算法的基础上提出了一种利用最小值控制递归平均( MCRA) 来估计噪声的方法。将此方法应用于波束形成,MCRA 估计出的噪声使LMS 自适应语音增强的效果更好和抗噪性更强。 2.2基于固定波束形成的麦克风阵列语音增强 固定波束形成技术是最简单最成熟的一种波束形成技术。1985 年美国学者Flanagan 提出采用延时-相加波束形成方法进行麦克风阵列语音增强,该方法通过对各路麦克风接收到的信号添加合适的延时补偿,使得各路输出信号在某一方向上保持同步,并在该方向的入射信号获得最大增益。此方法易于实现,但要想获取较高的噪声抑制能力则需要增加麦克风数目,然而对非相干噪声没有抑制能力,环境适应性差,因此实际中很少单独使用。后来出现的微分麦克风阵列、超方向麦克风阵列和固定频率波束形成技术也属于固定波束形成。 采用可调波束形成器的GSC麦克风阵列语言增强算法,其实质在GSC结构中的固定波束形成器前端引入各通道可调时延补偿,构造可调波束形成器进行声源方位估计,从而在目标声源方位获取阶段即可利用阵列的空间增益来提高方位估计性能。延迟求和波束形成器主要目的是增强主瓣方向目标信号,而抑制其他方向的噪声信号。
怎样的定位才是精准剖析声音定位原理分析解析
怎样的定位才是精准? 剖析声音定位原理 分页浏览|全文浏览2013-05-03 05:10 【中关村在线原创】作者:武竟| 责编:王乐评论 ?本文导航第1页:声音定位原理全剖析 ?第2页:人的双耳效应 ?第3页:影响人们定位的因素 ?第4页:音响的摆位关系到声场表现 ?第5页:音响和录音共同决定声场表现 ?第6页:关于立体声技术中的定位 ?第7页:好的声场定位对器材的要求 返回分页阅读文章 声音定位原理全剖析 [中关村在线音频频道原创]定位,这是一个简单又复杂的名词,如果在一般的生活中来说,定位或许就是找准位置在哪里,这是一件非常容易理解的事情。但这个词在音乐发烧友中也是比较常用的一个名词,而它在音乐或者音频的领域理解起来似乎并不那么直观,毕竟这些都是靠耳朵主观来判断的东西,无法去具体量化。很多初烧或者是已经在烧的朋友们仍然无法弄明白定位的问题,比如怎么叫做定位精准,怎样的定位才是精准的,关于声音从什么地方传出来,应该怎么去判断这些一大堆的问题。 或许一般聆听音乐的人并不会太多去注意到定位的情况,因为在我们聆听的大众流行音乐中大都是采用近场录音的,聆听起来基本上声音都是由最近的地方传出,不会需要太多去注意定位的问题,也没有必要去注意。但如果是对于经常影音聆听或者欣赏交响音乐的朋友们来说,定位的问题就显得尤为重要了。
怎样的定位才是精准? 剖析声音定位原理 其实解释起来还是一样的——声音会从什么位置传出来,不过理解起来就显得抽象多了,毕竟我们是在一个虚拟的环境中聆听录音,而不是在现实中去切身感受。那么下面,我们就为大家来解析一下关于这个定位的问题,这其中会涉及到人对于声音的判断、音响器材的摆位、影院声道和录音等诸多问题。 下面,我们将会以尽量易于理解的语言为大家带来解释。
声源定位测试系统的制作方法
本技术公开了声源定位测试系统,包括电脑控制软件平台、控制器、功率放大器、扬声器、声音采集器,电脑控制软件平台和控制器通过USB数据线相连;所述控制器和功率放大器通过控制器对放大器数据线相连;所述功率放大器和扬声器通过放大器对扬声器数据线相连;所述声音采集器和控制器通过信号采集器对控制器数据线相连;它通过声源定位测试系统在整个输出过程中对声音的大小、方向,以及声音的种类和发出声音的声道和通道数量进行控制,来便于对具有声源定位技术的产品进行不同阶段和方式的技术测试,从而使声源定位技术测试更便捷、更准确。 技术要求 1.声源定位测试系统,包括电脑控制软件平台(1)、控制器(2)、功率放大器(3)、扬声器(4)、声音采集器(5),其特征在于:所述电脑控制软件平台(1)和控制器(2)通过USB数据线(6)相连;所述控制器(2)和功率放大器(3)通过控制器对放大器数据线(8)相连;所述功率放大器(3)和扬声器(4)通过放大器对扬声器数据线(9)相连;所述声音采集器(5)和控制器(2)通过信号采集器对控制器数据线(7)相连;
当系统在声音输出状态时,先由电脑控制软件平台(1)发出的单个或多个声音控制指令转换成数字信号组通过USB数据线(6)传递至控制器(2);再由控制器(2)对数字信号组进行分析处理和分流排序,并将分流排序的数字信号组采用单独、合并、部分叠加等不同的方式转换成新的排序的单个或多个模拟信号,且通过控制器对放大器数据线(8)分别传递给功率放大器(3);后由功率放大器(3)将新的排序的单个或多个模拟信号进行放大且通过放大器对扬声器数据线(9)分别对应传递给扬声器(4),最后由扬声器(4)将模拟信号分别转换成声信号并对外输出; 当系统在声音输入状态时,先由声音采集器(5)将所采集到的声音信号通过控制器数据线(7)传递给控制器(2),然后由控制器(2)对声音采集器(5)所输入的模拟信号转化为数字信号,控制器(2)对数字信号进行分析处理并将处理过后的数字信号通过USB数据线(6)传递至电脑控制软件平台(1),由电脑控制软件平台(1)将数字信号转换成图文数据显示。 2.根据权利要求1所述的声源定位测试系统,其特征在于:所述扬声器(4)为一台或多台。 3.根据权利要求1所述的声源定位测试系统,其特征在于:所述控制器对放大器数据线(8)为一根或多根。 4.根据权利要求1所述的声源定位测试系统,其特征在于:所述放大器对扬声器数据线(9)为一根或多根。 技术说明书 声源定位测试系统 技术领域 本技术涉及声学领域,具体涉及一种在一定的空间环境下,通过在不同的方位提供不同方式的声源来形成声源定位测试场所的体系。 背景技术
声音定位系统
声音定位系统 一、任务 设计一个声音大小发光指示电路系统,声响模块发声,能够让相应的发光二极管发光,显示出声响模块坐标等。本设计是在一块不大于1米X1米的平板上贴一张350mm×350mm的坐标纸,在其外侧分别固定安装一个声音接收模块,声音接收模块通过导线将声音信号传输到信息处理模块,声音定位系统根据声响模块通过空气传播到各声音接收模块的声音信号,判定声响模块所在的位置坐标。系统结构示意图如图1-1所示: 二、要求 1.基本要求(只在东南西北4个方向上实现): (1)设计2个声音识别方位(如东南),每个方位通过一个LED发光指示,当检测到该方位的声音时,LED发光5s后闪烁3s熄灭;(10分) (2)设计4个声音识别方位(如东南西北),每个方位通过一个LED发光指示,当检测到该方位的声音时,LED发光5s后闪烁3s熄灭;(15分)(3)声响模块持续发声,移动声响模块,LED灯实时指示出声响模块位置,并在液晶上展现出示意图。(15分) (4)声音信息处理模块只能对一定频率的声音进行识别处理,其他频率的声音都不能实现以上的要求。(10分)
2.发挥部分 (1)制作一个正弦发声模块。(15分) (2)液晶建立坐标系,移动声响模块到任意位置,液晶显示出声响模块位置坐标及示意图。(15分) (3)液晶建立坐标系,声响模块持续发声,移动至任意位置,在液晶上实时显示出声响模块的位置坐标及示意图。(20分) 三、说明 (1)声响模块可以使用手机等发声。 (2)声响模块的移动均不会超过坐标纸。 (4)声音的频率可自行选定。 (3)禁止使用任何无线通讯设备。
四、评分标准 论文规范性,详见另一文件,比赛论文格式说明,比赛论文模板为“声音定位系统设计”: 注:训练时间为7月10日至7月16日,约为5天时间。如有任何问题可以向徐文贵或余苏威提出,时间紧迫,大家好好努力珍惜,题目的解释权归评测组所有。
线性麦克风阵列定向性能的研究
线性麦克风阵列定向性能的研究? 段进伟, 史元春, 陈孝杰 (清华大学计算机科学与技术系,北京市海淀区, 100084) Study on the Directing Performance of the Linear Microphone Array Duan Jin-wei, Shi Yuan-chun, Chen Xiao-jie (Department of Computer Science and Technology, Tsinghua University, Beijing, 100084, China) + Corresponding author: Phn: +86-010-********-805, E-mail: saundradjw945@https://www.360docs.net/doc/b017429536.html, Received 2007-07-31; Accepted 2007-08-31 Abstract: Speech source localization technology, using microphone array, plays an important role in the area of human-computer interaction, especially that in smart space. The information of source position provided by the microphone array can be used in many place, such as dynamically adjust the parameters of the array in order to acquire high-quality speech audio, etc. Therefore, speech source localization has become a hot topic in both research and application areas. The objective of this paper is to analyze the affection on the symmetrical linear microphone array directing performance caused by the changes of microphone numbers, the spacing between microphones, the sampling frequency and so on. In order to accomplish this, we set up two linear microphone arrays with different hardware and designed comparative experiments. After the speech data was captured, an algorithm called SRP-PHAT was used to estimate the speech source direction. We analyzed the possible theoretic errors existed in the experiments carefully, and after the experiments, we analyzed the directing results, and compared the actual directing errors with the possible theoretic errors. At last, we summarized the performance of the two linear microphone arrays, and educed the configuration of the linear microphone array system when its integrative performance achieves the peak. Key words: linear microphone array; speech source directing; theoretic error; directing performance 摘 要: 麦克风阵列在人机交互中有着重要的研究和应用价值。而线性均匀麦克风阵列最简单,其基本功能是声源的定向。本文通过实验分析各种参数变化对线性麦克风阵列定向性能的影响。我们搭建了硬件参数不同的两套线性麦克风阵列并设计了对比实验。使用SRP-PHAT算法定向声源。我们分析了声源定向时各种可能的理论误差,对实验结果进行了误差分析,并与可能的理论误差做了对比。通过理论分析和对比实验,本文提出了线性麦克风阵列系统的性能评价指标,并给出了综合性能最优时的麦克风阵列系统参数配置。 关键词: 线性麦克风阵列; 声源定向; 理论误差; 定向性能 中图法分类号: ****文献标识码: A ?Supported by National High-Tech Research and Development Plan of China under Grant No. 2006AA01Z198; 作者简介: 段进伟(1985-),男,云南昆明人,大学本科,主要研究领域为人机交互与普适计算;
基于MATLAB的声源定位系统
基于MATLAB的声源定位系统摘要 确定一个声源在空间中的位置是一项有广阔应用前景的有趣研究,将来可以广泛的应用于社会生产、生活的各个方面。 声源定位是通过测量物体发出的声音对物体定位,与使用声纳、雷达、无线通讯的定位方法不同,前者信源是普通的声音,是宽带信号,而后者信源是窄带信号。根据声音信号特点,人们提出了不同的声源定位算法,但由于信号质量、噪声和混响的存在,使得现有声源定位算法的定位精度较低。此外,已有的声源定位方法的运算量较大,难以实时处理。 关键词:传声器阵列;声源定位;Matlab
目录 第一章绪论 (1) 第二章声源定位系统的结构 (2) 第三章基于到达时间差的声源定位原理 (3) 第四章串口通信 (5) 第五章实验电路图设计 (8)
第六章总结 (16) 第七章参考文献 (17) 第一章绪论 1.1基于传声器阵列的定位方法简述 在无噪声、无混响的情况下,距离声源很近的高性能、高方向性的单传声器可以获得高质量的声源信号。但是,这要求声源和传声器之间的位置相对固定,如果声源位置改变,就必须人为地移动传声器。若声源在传声器的选择方向之外,则会引入大量的噪声,导致拾取信号的质量下降。而且,当传声器距离声源很远,或者存在一定程度的混响及干扰的情况下,也会使拾取信号的质量严重下降。为了解决单传声器系统的这些局限性,人们提出了用传声器阵列进行声音处理的方法。
传声器阵列是指由一定的几何结构排列而成的若干个传声器组成的阵列。相对于单个传声器而言具有更多优势,它能以电子瞄准的方式从所需要的声源方向提供高质量的声音信号,同时抑制其他的声音和环境噪声,具有很强的空间选择性,无须移动传声器就可对声源信号自动监测、定位和跟踪,如果算法设计精简得当,则系统可实现高速的实时跟踪定位。 传声器阵列的声音信号处理与传统的阵列信号处理主要有以下几种不同: (1)传统的阵列信号处理技术处理的信号一般为平稳或准平稳信号,相关函数可以通过时间相关来准确获得,而传声器阵列要处理的信号通常为短时平稳的声音信号,用时间平均来求得准确的相关函数比较困难。 (2)传统的阵列信号处理一般采用远场模型,而传声器阵列信号处理要根据不同的情况选择远场模型还是使用近场模型。近场模型和远场模型最主要的区别在于是否考虑传声器阵列各阵元因接收信号幅度衰减的不同所带来的影响,对于远场模型,信源到各阵元的距离差与整个传播距离相比非常小,可忽略不计,对于近场模型,信源到各阵元的距离差与整个传播距离相比较大,必须考虑各阵元接收信号的幅度差。 (3)在传统的阵列信号处理中,噪声一般为高斯噪声(包括白、色噪声),与信源无关,在传声器阵列信号处理中噪声既有高斯噪声,也有非高斯噪声,这些噪声可能和信源无关,也可能相关。 由于上述阵列信号处理间的区别,给传声器阵列信号处理带来了极大的挑战。声波在传播过程中要发生幅度衰减,其幅度衰减因子与传播距离成正比,信源到传声器阵列各阵元的距离是不同的,因此声波波前到达各阵元时,幅度也是不同的。 另外,当声音信号在传播时,由于反射、衍射等原因,使到达传声器的声音信号的路径除了直达路径外还存在着多条其它路径,从而产生接收信号的幅度衰减、音质变差等不
基于麦克风阵列的语音增强算法概述
- 29 - 基于麦克风阵列的语音增强算法概述 丁 猛 (海军医学研究所,上海 200433) 【摘 要】麦克风阵列语音增强技术是将阵列信号处理与语音信号处理相结合,利用语音信号的空间相位信息对语音信号进行增强的一种技术。文章介绍了各种基于麦克风阵列的语音增强基本算法,概述了各算法的基本原理,并总结了各算法的特点及其所适用的声学环境特性。 【关键词】麦克风阵列;阵列信号处理;语音增强 【中图分类号】TN911.7 【文献标识码】A 【文章编号】1008-1151(2011)03-0029-02 (一)引言 在日常生活和工作中,语音通信是人与人之间互相传递信息沟通不可缺少的方式。近年来,虽然数据通信得到了迅速发展,但是语音通信仍然是现阶段的主流,并在通信行业中占主导地位。在语音通信中,语音信号不可避免地会受到来自周围环境和传输媒介的外部噪声、通信设备的内部噪声及其他讲话者的干扰。这些干扰共同作用,最终使听者获得的语音不是纯净的原始语音,而是被噪声污染过的带噪声语音,严重影响了双方之间的交流。 应用阵列信号处理技术的麦克风阵列能够充分利用语音信号的空时信息,具有灵活的波束控制、较高的空间分辨率、高的信号增益与较强的抗干扰能力等特点,逐渐成为强噪声环境中语音增强的研究热点。美国、德国、法国、意大利、日本、香港等国家和地区许多科学家都在开展这方面的研究工作,并且已经应用到一些实际的麦克风阵列系统中,这些应用包括视频会议、语音识别、车载声控系统、大型场所的记录会议和助听装置等。 文章将介绍各种麦克风阵列语音增强算法的基本原理,并总结各个算法的特点及存在的局限性。 (二)常见麦克风阵列语音增强方法 1.基于固定波束形成的麦克风阵列语音增强 固定波束形成技术是最简单最成熟的一种波束形成技术。1985年美国学者Flanagan 提出采用延时-相加(Delay-and-Sum)波束形成方法进行麦克风阵列语音增强,该方法通过对各路麦克风接收到的信号添加合适的延时补偿,使得各路输出信号在某一方向上保持同步,并在该方向的入射信号获得最大增益。此方法易于实现,但要想获取较高的噪声抑制能力则需要增加麦克风数目,然而对非相干噪声没有抑制能力,环境适应性差,因此实际中很少单独使用。后来出现的微分麦克风阵列(Differential Microphone Arrays)、超方向麦克风阵列(Superairective Microphone Arrays )和固定频率波束形成(Frequency-Invariant Beamformers) 技术也属于固定波束形成。 2.基于自适应波束形成器的麦克风阵列语音增强 自适应波束形成是现在广泛使用的一类麦克风阵列语音增强方法。最早出现的自适应波束形成算法是1972年由Frost 提出的线性约束最小方差(Linearly Constrained Minimum Variance,LCMV)自适应波束形成器。其基本思想是在某方向有用信号的增益一定的前提下,使阵列输出信号的功率最小。在线性约束最小方差自适应波束形成器的基础上,1982年Griffiths 和Jim 提出了广义旁瓣消除器(Generalized Sidelobe Canceller, GSC),成为了许多算法的基本框架(图1)。 图1 广义旁瓣消除器的基本结构 广义旁瓣消除器是麦克风阵列语音增强应用最广泛的技术,即带噪声的语音信号同时通过自适应通道和非自适应通道,自适应通道中的阻塞矩阵将有用信号滤除后产生仅包含多通道噪声参考信号,自适应滤波器根据这个参考信号得到噪声估计,最后由这个被估计的噪声抵消非自适应通道中的噪声分量,从而得到有用的纯净语音信号。 如果噪声源的数目比麦克风数目少,自适应波束法能得到很好的性能。但是随着干扰数目的增加和混响的增强,自适应滤波器的降噪性能会逐渐降低。 3.基于后置滤波的麦克风阵列语音增强 1988年Zelinski 将维纳滤波器应用在麦克风阵列延时—相加波束形成的输出端,进一步提高了语音信号的降噪效果,提出了基于后置滤波的麦克风阵列语音增强方法(图2)。基于后置滤波的方法在对非相干噪声抑制方面,不仅具有良好的效果,还能够在一定程度上适应时变的声学环境。它的基本原理是:假设各麦克风接收到的目标信号相同,接收到的噪声信号独立同分布,信号和噪声不相关,根据噪声特性, 【收稿日期】2010-12-30 【作者简介】丁猛(1983-),男,海军医学研究所研究实习员。
基于麦克风阵列的声源定位技术毕业设计
毕业设计说明书基于麦克风阵列的声源定位技术 学生姓名:学号: 学院: 专业: 指导教师: 2012年 6 月
基于麦克风阵列的声源定位技术 摘要 声源定位技术是利用麦克风拾取语音信号,并用数字信号处理技术对其进行分析和处理,继而确定和跟踪声源的空间位置。声源定位技术在视频会议、语音识别和说话人识别、目标定位和助听装置等领域有着重要的应用。传统的单个麦克风的拾音范围很有限,拾取信号的质量不高,继而提出了用麦克风阵列进行语音处理的方法,它可以以电子瞄准的方式对准声源而不需要人为的移动麦克风,弥补单个麦克风在噪声处理和声源定位等方面的不足,麦克风阵列还具有去噪、声源定位和跟踪等功能,从而大大提高语音信号处理质量。 本文主要对基于多麦克风阵列的声源定位技术领域中的基于时延的定位理论进行了研究,在此基础上研究了四元阵列、五元阵列以及多元阵列的定位算法,并且分别对其定位精度进行了分析,推导出了影响四元、五元阵列目标方位角、俯仰角及目标距离的定位精度的一些因素及相关定位方程,并通过matlab仿真软件对其定位精度进行了仿真;最后在四元、五元阵列的基础上,采用最小二乘法对多元阵列定位进行了计算;通过目标计算值和设定值对比,对多元阵列的定位精度进行了分析,并得出了多元阵列的目标定位的均方根误差。 关键词:麦克风阵列,声源定位,时延,定位精度,均方根误差
Based on Microphone Array for Sound Source Localization Research Abstract Sound source positioning technology is to use the microphone to pick up voice signals, and digital signal processing technology used for their analysis and processing , Then identify and track the spatial location of sound source. Acoustic source localization techniques have a variety of important uses in videoconferencing, speech recognition and speaker identification, targets’ direction finding, and biomedical devices for the hearing impaired. The pick up range of traditional single microphone is limited, the signal quality picked up is not high, then a voice processing methods with the microphone array has been proposed . It may be electronically aimed to provide a high-quality signal from desired source localization and doe s not require physical movement to alter these microphones’ direction of reception. Microphone array has the functions of de-noising, sound source localization and tracking functions, which greatly improved the quality of voice signal processing. The article discusses some issues of sound source localization based on microphone array, On the basis ,it studies a four element array,five element array and an multiple array positioning algorithm, then the positioning precision is analyzed. Derived some factors of the azimuth and elevation angle targets the target range of the estimation precision affected and positioning equation. And through MATLAB simulation software for its positioning accuracy of simulation. finally ,based on four yuan, five yuan of array, using the least square method ,the multiple array localization were calculated. Through the contrast of the target value and set value, multiple array positioning accuracy is analyzed, and the of diverse array target positioning. Keywords: Microphone Array, Sound Source Localization, Time Delay, Positioning precision, root mean square error
D题 声音定位系统
题目:声音定位系统(D题) 摘要: 为了满足声音定位系统的设计要求,进行了各单元模块电路方案的比较论证及确定,本设计系统采用低功耗16位单片机、MSP430F169、两块TI高速作为主控芯片,其中核心部分的三个主要功能模块是控制模块、声响模块和声音接收模块,四个500HZ声音的采集由一块单片机进行控制,速度快,计算结果精准;声响模块的发声由另一块单片机产生一个500HZ的声音信号,通过功放电路,驱动低音扬声器发声,功耗低,调节灵活;声音接收模块由LM358搭建的前级放大电路和LM567搭建500HZ鉴频电路组成。本设计数据处理主要用取差值查表的方法来定位,这种测算方法相对于其它算法具有速度快,编程简单的优点,而且经过测试实验精确度完全满足题目3cm的要求。最后的实验表明,系统完全达到了设计要求,完成题目的大部分的要求。 关键词:500HZ声音采集、鉴频、功率放大、查表算法 Abstract: In order to satisfy the design requirements of the sound localization system, The program of each unit module circuit demonstration and determine,This design system uses low-power 16-bit MCU,MSP430F169 and TI high-speed as the main chip,The three main functional modules of core part is control module, sound modules and sound receiver module,The 500HZ sound collected by a MCU, fast, precise, accurate calculation;The sound of sound module to produce 500HZ sound signal by MCU.Through the power amplifier circuit driven bass speaker sound, low power consumption and flexible adjustment;the sound receiver module structures preamplifier circuit by LM358 and LM567 structures 500HZ frequency discriminator circuit.The sound receiver module preamplifier circuit built by LM358 and LM567 built 500HZ frequency discriminator circuit. Data processing of the design is mainly used to take the difference between the look-up table method to locate,This calculation method has a fast and simple programming advantages compared to other algorithms, Tested the accuracy of fully satisfy the subject requirements 3cm. The final experiments show that the system fully meets the design requirements to complete the subject requirements. Keywords: 500HZ sound acquisition, frequency, power zoom, look-up table algorithm
一文带你全面熟悉智能语音之麦克风阵列技术的原理
一文带你全面熟悉智能语音之麦克风阵列技术的原理 麦克风阵列(Microphone Array),从字面上,指的是麦克风的排列。也就是说由一定数目的声学传感器(一般是麦克风)组成,用来对声场的空间特性进行采样并处理的系统。 早在20世纪70、80年代,麦克风阵列已经被应用于语音信号处理的研究中,进入90年代以来,基于麦克风阵列的语音信号处理算法逐渐成为一个新的研究热点。而到了“声控时代”,这项技术的重要性显得尤为突出。 麦克风阵列能干什么? 任何一项技术的发生发展都伴随着问题的提出及解决,麦克风阵列也是如此。那么它主要应用在哪些场景下呢?又有着怎样的功能! ◆【噪声环境怎么破?】——语音增强(Speech Enhancement) 语音增强是指当语音信号被各种各样的噪声(包括语音)干扰甚至淹没后,从含噪声的语音信号中提取出纯净语音的过程。所以DingDong在嘈杂环境下,也能准确识别语音指令。通过麦克风阵列波束形成进行语音增强示意图 从20世纪60年代开始,Boll等研究者先后提出了针对使用一个麦克风的语音增强技术,称为单通道语音增强。因为它使用的麦克风个数最少,并且充分考虑到了语音谱和噪声谱的特性,使得这些方法在某些场景下也具有较好的噪声抑制效果,并因其方法简单、易于实现的特点广泛应用于现有语音通信系统与消费电子系统中。 但是,在复杂的声学环境下,噪声总是来自于四面八方,且其与语音信号在时间和频谱上常常是相互交叠的,再加上回波和混响的影响,利用单麦克风捕捉相对纯净的语音是非常困难的。而麦克风阵列融合了语音信号的空时信息,可以同时提取声源并抑制噪声。 目前科大讯飞已经实现了基于线性阵列、平面阵列以及空间立体阵列的波束形成和降噪技术,效果均达到业界一流水平。 2013年科大讯飞车载降噪产品和国际竞争对手效果对比 ◆【说话人老是变幻位置怎么破?】——声源定位(Source Localization)
声音定位系统
2014年重庆理工大学电子设计竞赛 声音定位系统(C题)
摘要:本系统使用STM32产生频率为500Hz的正弦波信号,该信号用LM386进行功率放大及驱动后输入到蜂鸣器作为声源。接收部分使用拾音器进行接收,首先对接收的信号经过同相放大,使变化的电流信号转换为变化的电压信号。然后经过由OP07组成的有源带通滤波器,该滤波器的中心频率为 500Hz,带宽为100Hz,增益为1倍,去除周围环境的声波,滤波后的信号正好是蜂鸣器发出的声音信号。再对滤波后的两路信号经过相移检测电路,可以把滤波后的正弦波转换为方波,以便单片机STM32对相位差信号进行捕获。声源定位是通过对四个拾音器接收到相位差信号进行处理,经过一套比较完善的算法可得声源的坐标,即可进行声源定位。 关键词:500Hz 声音定位 STM32 一、系统方案
1.声音信号产生的选择 方案一:采用NE555产生频率为500Hz的方波用来作为声音信号。它的作用是用内部的定时器来构成时基电路。外部通过简单的电路可获得所得的信号。该电路搭建比较简单,原理易于理解,电路中元器件参数也比较好计算。 方案二:用单片机STM32来产生频率为500Hz的正弦波用来作为声音信号。该正弦波信号的产生实质上是将正弦波转换的到的数组存入单片机,经DA转换输出正弦波。 方案比较:方案一中,用NE555产生信源不是很稳定,波形不太规范且信号的频率不固定,这样的信号对本系统不太合适。方案二中,用软件来产生信号,该信号很稳定,是比较标准的频率为500Hz的正弦波信号,而且,产生波形比较灵活,从而为发挥部分做好准备。因此选择方案二。 2.声源的选择 方案一:采用低音扬声器作为声源。扬声器是一种把电信号转变为声信号的换能器件。将单片机产生的频率为500Hz的信号接在扬声器的接收端,扬声器能发出强度比较大的声音信号。 方案二:采用无源蜂鸣器作为声源。无源蜂鸣器在提供一定频率的正弦波震荡源时,能够发出声音。试验中用无源蜂鸣器发声时,声音比较清晰,但声音强度比扬声器稍弱。 方案比较:这里选择方案二。 3.滤波方案的选择 方案一:用RC无源滤波器。通过计算可以较方便的通过匹配电阻电容得出所需要的通频带。该滤波电路抗干扰性较强,有较好的低频特性,并且选用标准的阻容元件易得。 方案二:用有源滤波器。有源滤波器是利用可关断电力电子器件,产生与负荷电流中谐波分量大小相等、相位相反地电流来抵消谐波的滤波装置。
麦克风阵列信号处理的研究现状与应用
麦克风阵列信号处理的研究现状与应用 罗金玉等:麦克风阵列信号处理的研究现状与应用 麦克风阵列信号处理的研究现状与应用 (1.武警工程学院研究生大队,陕西西安710086;2.武警工程学院通信工程系,陕西西安710086) 摘要:在回顾麦克风阵列信号处理研究历程的基础上,对麦克风阵列信号处理的特点进行分析,总结了目前的研究热 点问题及现有算法并对各算法的优缺点进行比较,重点阐述了使用最为广泛的声源定位算法,最后介绍几个有价值的应用 领域,为进一步研究麦克风阵列信号处理奠定基础. 关键词:麦克风阵列信号处理;声源定位;TD0A;应用, 中图分类号:TN911-34文献标识码:A文章编号:1004—373X(2010)23—0080—05 StudyStatusandApplicationofMicrophoneArraySignalProcessing LUOJin-yu,LIUJian-ping,ZHANGYi—wen (1.Post—graduateManagingBrigade,EngineeringCollegeofArmedPoliceForce,Xi'an710086,Chi na; 2.DepartmentofC0mmunlcationEngineering,EngineeringCollegeofArmedPoliceForce, Xi'art710086.China) Abstract:Theeharacteristicofthemicrophonearraysignalprocessingisanalyzedbasedonth ereviewfortheprogressof microphonearraysignalprocessing.Thehotissuebeingstudiedrecentlyandtheexistingalgo rithmscorrespondingtoitare summerized.Themeritsanddemeritsofthealgorithmsarecompared.Thewidely-usedsoun dsourcelocalizationalgerithmis elaboratedemphatically.Somevaluableapplicationfieldsareintroduced. Keywords:microphonearraysignalprocessing;soundsourcelocalization;TDOA;applicati
声音定位系统开题报告
西安交通大学城市学院 本科毕业设计(论文)开题报告 题目声音定位系统设计 所在系电信系 学生姓名张超群 专业自动化 班级 902 学号 09010364 指导教师郭霞 教学服务中心制表 2013 年 3 月
声音定位系统的设计 一、课题研究的目的和意义 声音定位技术是利用声学与电子装置接受声波以确定声源位置的一种技术,它是一种重要的军事侦察手段。声音定位产生于第一次世界大战。开始根据火炮发出的声音测定火炮位置。其系统有多个声测哨站与声测中心组成,两者用电缆连接。声测哨根据传感器接受信号,声测中心记录信号并根据同一信号到达不同传感器的时间差计算火炮位置[1]。 随着雷达侦测技术的兴起,声音定位技术曾一度遭到冷冻,法军和美军分别于70年代80年代取消了声测侦察[2]。近年来,由于雷达面临着电子干扰、反辐射导弹、低空突防和隐身技术这四大威胁,越来越容易遭受攻击。因此,人们又开始重视被动式传感器,重新激起对声测技术的兴趣[3]。 声音定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是[4]: (1)不受通视条件限制。可见光、激光和无线电侦察器材需要通视目标,在侦察器材和目标之间不能有遮蔽物,而声测系统可以侦察遮蔽物(如山,树林等)后面的声源。 (2)隐蔽性强。声测系统不受电磁波干扰也不会被无线电侧向及定位,工作隐蔽性较强。 (3)不受能见度限制。其他侦察器材受环境气候影响较大,在恶劣气候条件下工作时性能下降,甚至无法工作。声测系统可以在夜间、阴天、雾天、和下雪天工作,具有全天候工作的特点。 声源定位在战场之外也同样具有广泛的应用前景,它可用于电话会议系统、视频会议系统、可是电话等系统中的控制摄像头和传声器阵列波速方向对准正在说话的人;也可用于语音及说话人识别软件的前端预处理,以提供高质量的声音信号,提高语音及说话人识别软件的识别率;亦可用于强噪声环境下的声音获取、大型场所的会议记录,以提高声音拾取质量;还可用于助听装置中,更好地为耳
声源定位系统毕业设计论文
声源定位系统毕业设计论文 0 前言 声音是我们所获取的外界信息中非常重要的一种。不同物体往往发出自己特有的声音,而根据物体发出的声音,人们可以判断出物体相对于自己的方位。有些应用场合,人们需要用机器来完成声音定位这个功能,并且往往要求定位精度比较高。2003年的美伊战争期间,人民网、CCTV网站的军事频道、国防在线等网站均报道了装配于美军的狙击手探测技术,这项技术其中一部分就包含了声源定位技术。 声源定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是: 1)不受通视条件限制。可见光、激光和无线电侦察器材需要通视目标,在侦察器材和目标之间不能有遮蔽物,而声测系统可以侦察遮蔽物(如山,树林等)后面的声源。 2)隐蔽性强。声测系统不受电磁波干扰也不会被无线电侧向及定位,工作隐蔽性较强。 3)不受能见度限制。其他侦察器材受环境气候影响较大,在恶劣气候条件下工作时性能下降,甚至无法工作。声测系统可以在夜间、阴天、雾天、和下雪天工作,具有全天候工作的特点。 以下对美军装备的报道来自于《“巴格达之战”考验英军巷战武器装备》一文,该文刊登于2003年4月8日国防在线美伊战争专题。“狙击手声测定位系统通过接收并测量膛口激波和弹丸飞行产生的冲击波来确定狙击手的位置,通常仅能探测超音速弹丸。这种系统有单兵佩挂型、固定设置型和机动平台运载型。美国BBN系统和技术公司的声测系统,通过测量弹丸飞行中的声激波特性来探测弹丸并进行分类。该系统为固定设置型,采用2个置于保护区两侧的传声器阵列或6个分布在保护区内的单向传声器。传声器通过电缆或射频链路与指挥节点相连。为了准确定位,需事先确定传声器的距离,精度要在1米以内。该系统可探测到90%的射击,定位精度为方位 1.2°、水平3°。此外,美国的“哨兵”和“安全”有效控制城区环境安全系统均是采用声测定位技术的反狙击手系统。 美军这一套声源定位系统通过定位弹丸产生的特殊激波和冲击波,探测出狙击手的位置,在战场上有效保护战士生命。而在民用方面,声源定位系统也有广阔的应用前景。试设想一下未来的可视电话,如果在电话上装上声源定位系统,实时探测出人说话