log算子的基本原理
基于双边滤波的LOG边缘检测算法
摘要:传统LOG边缘检测算法采用高斯函数滤波时,尽管抑制了噪声,但同时也损坏了部分低强度边缘。针对这一问题,本文提出了结合双边滤波的LOG边缘检测算法,首先采用双边滤波来替代传统LOG算子中的高斯滤波,然后计算平滑后图像的拉普拉斯,最后提取运算后的零交叉点作为图像的边缘。实验表明,改进后的LOG算法能有效抑制噪声,较好地保护边缘,提高了检测精度,减少伪边缘数,相对传统LOG算法具有更好的检测效果。
关键字:LOG算子;双边滤波;边缘保护;边缘检测
1.引言
边缘是指图像局部强度变化最显著的部分,反映了图像中物体最基本的特征,是对图像进行分割、理解以及检索的重要依据。边缘检测一直是图像处理中的热点和难点[]1。
由于数字图像中可能包含不同程度的噪声,使得边缘检测在图像处理中比较困难。经典的边缘检测算子,如Robert、Prewitt、Sobel等[]2,简单、易于实现,但对噪声敏感、抗干扰性能差。Marr边缘检测算法[]3克服了一般微分运算对噪声敏感的缺点,利用能够反映人眼视觉特性的LOG算子对图像的边缘进行检测。该方法在图像边缘检测中具有一定的优势,然而在实际应用中,边缘检测算法仍然存在着一定的问题。比如尺度因子无法自适应调整、模板的尺寸对检测结果影响比较大、零穿越结果无法区分像素反差的大小等。使得噪声对图像仍有较大的影响,众多学者对其进行了研究。杨振亚等人[]4针对LOG算子的缺陷,提出了选择性平滑方式清除图像中的椒盐噪声;提出了依据图像灰度的一阶导数极大值和二阶导数零穿相结合的边缘检测方法,抑制了图像中的大部分其它噪声,并保持了边缘定位精度;还通过用图像灰度共生矩阵的惯性矩特征值,自适应调整高斯空间系数和边缘检测阈值,实现了图像边缘的自动提取。李小红等人[]5分析LOG滤波器边缘检测方法及多尺度特性的理论基础上,提出了一种LOG边缘检测的改进算法。该算法对滤波后的梯度图像选取一个阈值T以提高边缘检测的精度。杨东华等人[6]根据实际应用中LOG模板的设计要求,提出了不等间隔采样和
非均匀量化相结合的数字化方法。该方法设计的模板能够获得更加丰富的图像边缘,并且边缘的连续性较好。严国萍等人[]7对经典LOG 边缘检测算子引入了角度信息参量进行推导,使以圆为对称的经典的LOG 边缘检测算子变成为以椭圆对称,并且可以在坐标轴旋转任意角度时增强其边缘检测的能力,使之能对不同方向的边缘更加有效地进行检测。但上述边缘检测方法实际操作都较为复杂,且大多不能很好的去除噪声且保留图像更多的细节信息。
双边滤波是一种非线性滤波方法,较一般的线性滤波方法(如高斯滤波)在去除噪声的同时也能避免边缘模糊,因此本文采用双边滤波来替代LOG 算子中原有的高斯滤波,能够有效地保护边缘,从而实现图像去噪和细节保留。因此本文在分析基于零交叉的LOG 算子的基础上,针对图像噪声和边缘信息的特点,提出一种引入双边滤波的LOG 边缘检测算法。
2.传统的LOG 边缘检测算法
LOG 算子来源于Marr 视觉理论中提出的边缘提取思想,即先对原始图像进行平滑处理,从而实现对噪声最大程度的抑制,再对平滑后的图像提取边缘。LOG 算子被誉为最佳边缘检测算子之一[]8
。 LOG 算子的基本步骤如下:
(1) 采用二维高斯滤波器平滑滤波;
(2) 采用二维拉普算子进行图像增强;
(3) 依据二阶导数零交叉进行边缘检测。
二维高斯滤波器的函数(,)G x y )2exp(21),(22
22σπσy x y x G +-= (1)
用(,)G x y 与原始图像),(y x f 进行卷积,得到平滑图像(),I x y
()()(),,,I x y G x y f x y =* (2)
其中*是卷积运算符,再用拉普拉斯算子()2?来获取平滑图像(),I x y 的二阶方向导数图像(),M x y 。由线性系统中卷积和微分的可交换性可得:
()(){}222,,[(,)(,)][(,)](,)M x y I x y G x y f x y G x y f x y =?=?*=?* (3)
对图像的高斯平滑滤波与拉普拉斯微分运算可以结合成一个卷积算子: )2exp()2(21
),(22222242σσπσy x y x y x G +--+=? (4)
式中),(2y x G ?即为LOG 算子,又称为高斯拉普拉斯算子。求取(),M x y 的零穿点轨迹即可得到图像),(y x f 的边缘。以),(2y x G ?对原始灰度图像进行卷积运算后提取的零交叉点作为边缘点。
然而在实际应用中,LOG 算子仍存在对噪声敏感,噪声平滑能力与边缘定位能力相矛盾等缺点。这些问题影响了LOG 算子的应用效果,对此本文提出了这种改进方案。
3.改进的LOG 边缘检测算法
3.1双边滤波
Tomasi 和Manduchi 于1998年提出了双边滤波算法[]9
。该算法加权系数不
仅考虑了像素间的距离,同时也考虑了灰度相似性[]10。双边滤波方法可用如下
公式表示: ()()()
()()(),,,,,,s i j s i j w i j I i j f x y w i j ∈Ω∈Ω=∑∑
(5)
其中
(),f x y 为去噪后图像,(),s w i j 为空间域权值,(),I i j 为原图像,Ω为像素(),x y 处的邻域范围。同理,在灰度范围内进行滤波与空间范围内滤波的方法相似。它可表示为:
()()()
()()(),,,,,,r i j r i j w i j I i j f x y w i j ∈Ω∈Ω=∑∑
(6)
其中(),r w i j 为灰度域权值,将空间邻近度与灰度相似度相结合进行滤波,就得到双边滤波为:
()()()
()()(),,,,,,i j i j w i j I i j f x y w i j ∈Ω∈Ω=∑∑ (7)
()()(),,,s r w i j w i j w i j = (8)
在图像变化较为平缓的区域,其邻域内像素灰度值相差不大,双边滤波转化为高斯低通滤波器;在图像变化剧烈的区域,滤波器用边缘点邻域内灰度相似的像素点的灰度平均值代替原灰度值。因此,双边滤波器既平滑了图像,又保护了图像边缘[]11。
3.2算法描述
双边滤波既可以较好地去除图像噪声,又可以保护图像的边缘信息,解决了LOG 算子使用高斯滤波后图像模糊和边缘丢失问题。
()()()()()()()(),,,,,,,,s r i j p s r i j w i j w i j I i j f x y w w i j w i j ∈Ω==∑∑ (9)
一般情况下,它的空间邻近度函数(),s w i j 和灰度相似度函数(),r w i j 都取为参数为欧几里得距离的高斯函数,通常定义为:
()222,exp 2s s i x j y w i j σ??-+-=-?????? (10)
()22(,)(,),exp 2r r I i j I x y w i j σ??-=-?????? (11)
其中,s σ为基于高斯函数的空间标准差,r σ为基于高斯函数的灰度标准差。
将原始图像(,)f x y 与 (),f x y 进行卷积运算,得出平滑后的图像(),I x y ,即:
()() (),,,I x y f x y f x y =* (13)
这样既平滑了图像又降低了噪声,孤立的噪声点和一些较小的结构组织将被滤除,同时保护了图像边缘。图像增强仍采用二维拉普算子进行处理。得出:
()(){}() (){}22,,,,M x y I x y f x y f x y =?=?* (14) 拉普拉斯算子是一个二阶微分算子,它可在边缘处产生一个陡峭的零交叉,即一个由正到负的过零点,最后依据零交叉点进行边缘检测。
4.实验结果与比较
本实验以MATLAB(R2010a)为实验平台,采用传统LOG 边缘检测算法和改进后的算法分别对Lena 图像和Cameraman 图像进行边缘检测。
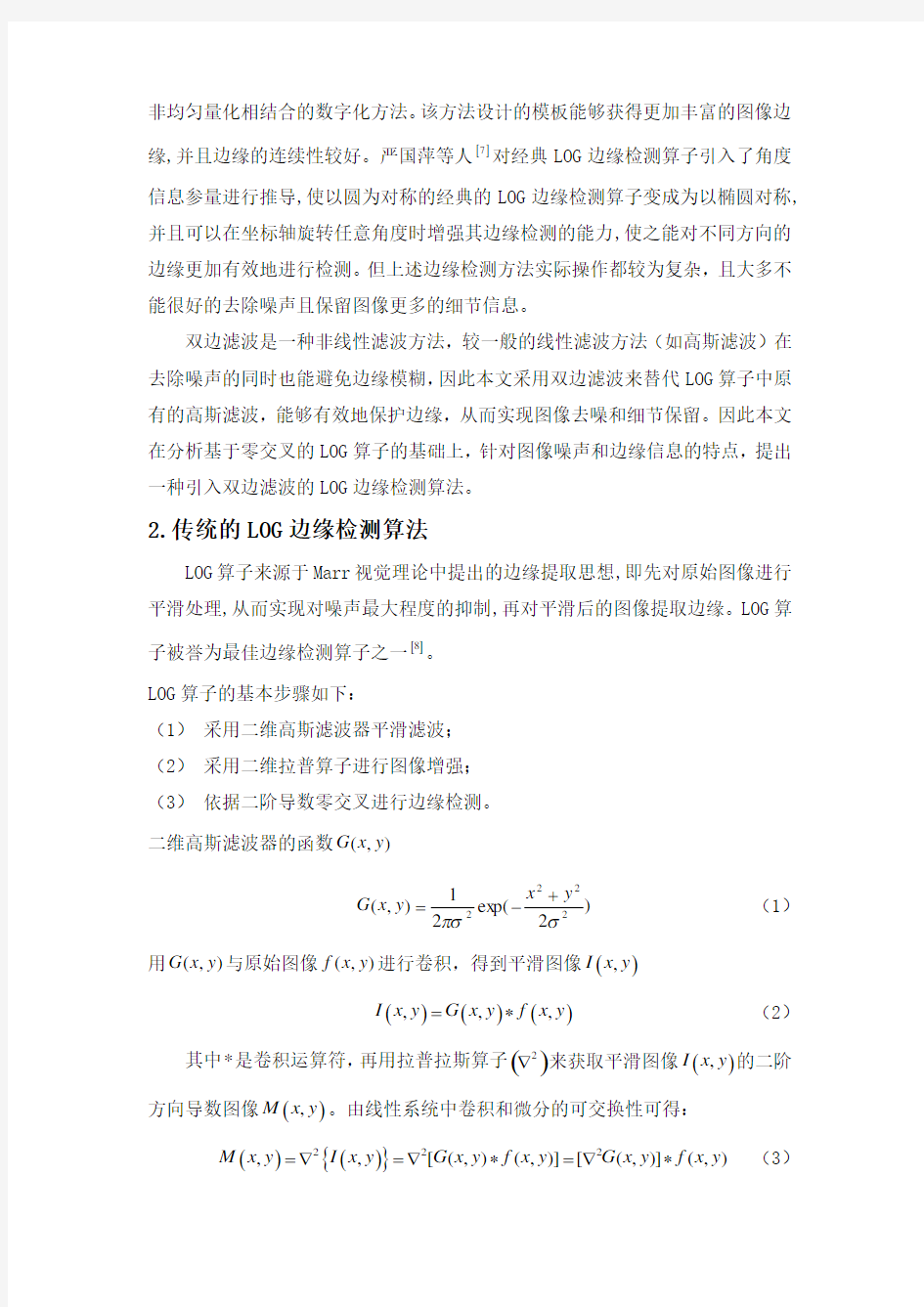
(a)Lena图像(b)传统LOG算法(c)本文方法
(d)Cameraman图像(e)传统LOG算法(f)本文方法
图1实验结果
图1中(b)与(c)对边可以发现,传统的LOG边缘检测算法对图像的边缘检测出很多漏检,图像边缘定位不够精确,轮廓不够清楚,提取的边缘信息过于冗杂,不能较好地显示图像的主要轮廓特征,不利于进一步的图像分析。而改进后的LOG算法检测出了更多的边缘细节,可清楚的看出图像的轮廓边缘。其精度要高于传统的LOG边缘检测算法。从(e)与(f)对比同样可以发现,许多没有被传统LOG检测算法检测出来的真边缘出现在改进后的算法提取的边缘图像(f)中,从中可看出,图像去除了许多噪声,又避免丢失很多真边缘,而且边缘轮廓明显、清晰,连续性较好。说明本文算法对图像的去噪和边缘检测效果均优于传统的LOG算法,能够获得更好的边缘检测图像。
5.结论
本文对传统LOG边缘检测算法进行了分析,提出了结合双边滤波的LOG边缘检测算法。实验表明,此算法能较好地滤除图像噪声,同时能很好的保持图像细
节信息,简单实用,复杂度低,具备更好的推广应用价值。
参考文献
[1]马娅丽,熊淑华,黑建业,一种改进的LOG边缘算法研究[J].计算机技术与发展,2013,23(9):7-9
[2]Rafeal C G,Richard E W.数字图像处理[M].阮秋琦,阮宇智,译.第2版.北京:电子工业出版社,2003:581-584
[3]Marr D,Hildreth E.Theory of edge detection [C]//Proceedings of the Royal Society of London.London,UK:[s.n.],1980:200-217
[4]杨振亚,汪淑仙,王成道自适应图像边缘检测算法[J]计算机应用与软件,2003,23(5):15-17
[5]李小红,基于LOG滤波器的图像边缘检测算法的研究[J]计算机应用应用与软件,2005,22(5):106-108
[6]杨东华,李久贤,卞治国.Marr边缘检测算法的研究[J]中国图象图形学报,2006,11(6):823-826
[7]严国萍,戴若愚,潘清基于LOG算子的自适应图像边缘检测方法[J]华中科技大学学报,2008,36(3):85-87
[8]程东旭,杨艳,赵慧杰,一种改进的LOG边缘检测算法[J].中原工学院学报,2011,22(2):18-21
[9]Tomasi C,Manduchi R. Bilateral Filtering for Gray and Color Images[C]//Proceedings of sixth international conference on computer vision(ICCV’98).Washington, DC, USA: IEEEComputer Society,1998. [10]胡伏原,姒绍辉,张艳宁等,自适应分数阶微分的复合双边滤波算法[J]中国图象图形学报,2013,18(10):1237-1246
[11]张志强,王万玉,一种改进的双边滤波算法[J].中国图象图形学
报,2009,14(3):443-447
[12]李德军,赵文杰等,一种基于双边滤波的图像边缘检测方法[J].计算机技术与发展,2007,17(4):160-163
基于改进LOG算子的图像边缘检测方法
万方数据
万方数据
第12期管力明,等:基于改进I,OG算子的图像边缘检测方法?115? 图1不同边缘检测算法仿真结果 图2Canny算子和本研究算子仿真比较 4结束语 本研究在分析原LOG算子的基础上,提出了一种改进的LOG算子,该算子通过引入并计算不同方向极坐标参数的方法,实现图像边缘点的检测,不需要考虑高斯系数盯具体取值对图像处理结果的影响,在实际应用中能对边缘和噪声做出合理的取舍,根据具体的图像自动获得图像边缘点。研究结果表明,所提算法对图像进行检测时,边缘细节明显,伪边缘相对较少,取得了理想的检测效果。且该算法较Prewitt算子、Canny算子¨驯等算法均具有明显的优越性。 参考文献(References): [1]赵景秀,韩君君,王菁,等.一种改进的LOG图像边缘检测方法[J].计算技术与自动化,2009,28(3):74—77.[2]孙先达,黄其坤,王璞瑁.Canny算法在岩心图像边缘检测中的应用[J].长江大学学报,2009,6(2):268—270.[3]CHENNai-jian,WANGSun—a11.AnImageEdgeDetectionandSegmentationAlgorithmBasedonSmall??WorldPhenom-? enon[C]//20083rdIEEEConferenceOffIndustrialElec. tronicsandApplications,2008:2272—2277. [4]ZHOUNing-ning,ZHAOZheng—XU,HONGLong,eta1.ANewImageEdgeDetectionAlgorithmBased013.Measuringof MediumTruthScale[C]//Proceedingsof2008IEEEInter- nationalConferenceonNetworking,SensingandControl, ICNSC,2008:698—703. [5】张永亮,刘安心.基于Prewitt算子的计算机数字图像边缘检测改进算法[J].解放军理工大学学报,2005,6(1): 44—46. [6]CHENYu,YANZhuang—zhi.ACellularAutomaticMethodfortheEdgeDetectionofImages[C]//Proceedingsofthe 4thintcmationalconferenceonIntelligentComputing:Ad— vancedIntelligent ComputingTheoriesandApplications,2008:935—942. [7]吴镇扬,周琳.数字信号与图像处理[M].北京:高等教育f{{版社,2006. [8]田自君,刘艺.基于LOG算子边缘检测的图像二值化处理[J].中国测试技术,2007,33(6):109一111. [9][美]PRATYWK.数字图像处理[M].邓鲁华,张延恒,译.北京:机械1二业出版社,2005. [10]SHANKARNG,RAVIN,ZHONGZW.Areal.time print-defectdetectionsystemforweboffsetprinting[J]. Me嬲u咖ent,2009,42(5):645—652. [编辑:张翔]万方数据
几种常用边缘检测算法的比较
几种常用边缘检测算法的比较摘要:边缘是图像最基本的特征,边缘检测是图像分析与识别的重要环节。基于微分算子的边缘检测是目前较为常用的边缘检测方法。通过对Roberts,Sobel,Prewitt,Canny 和Log 及一种改进Sobel等几个微分算子的算法分析以及MATLAB 仿真实验对比,结果表明,Roberts,Sobel 和Prewitt 算子的算法简单,但检测精度不高,Canny 和Log 算子的算法复杂,但检测精度较高,基于Sobel的改进方法具有较好的可调性,可针对不同的图像得到较好的效果,但是边缘较粗糙。在应用中应根据实际情况选择不同的算子。 0 引言 边缘检测是图像分析与识别的第一步,边缘检测在计算机视觉、图像分析等应用中起着重要作用,图像的其他特征都是由边缘和区域这些基本特征推导出来的,边缘检测的效果会直接影响图像的分割和识别性能。边缘检测法的种类很多,如微分算子法、样板匹配法、小波检测法、神经网络法等等,每一类检测法又有不同的具体方法。目前,微分算子法中有Roberts,Sobel,Prewitt,Canny,Laplacian,Log 以及二阶方向导数等算子检测法,本文仅将讨论微分算子法中的几个常用算子法及一个改进Sobel算法。 1 边缘检测
在图像中,边缘是图像局部强度变化最明显的地方,它主要存在于目标与目标、目标与背景、区域与区域( 包括不同色彩) 之间。边缘表明一个特征区域的终结和另一特征区域的开始。边缘所分开区域的内部特征或属性是一致的,而不同的区域内部特征或属性是不同的。边缘检测正是利用物体和背景在某种图像特征上的差异来实现检测,这些差异包括灰度、颜色或纹理特征,边缘检测实际上就是检测图像特征发生变化的位置。边缘的类型很多,常见的有以下三种: 第一种是阶梯形边缘,其灰度从低跳跃到高; 第二种是屋顶形边缘,其灰度从低逐渐到高然后慢慢减小; 第三种是线性边缘,其灰度呈脉冲跳跃变化。如图1 所示。 (a) 阶梯形边缘(b) 屋顶形边缘 (b) 线性边缘 图像中的边缘是由许多边缘元组成,边缘元可以看作是一个短的直线段,每一个边缘元都由一个位置和一个角度确定。边缘元对应着图像上灰度曲面N 阶导数的不连续性。如果灰度曲面在一个点的N 阶导数是一个Delta 函数,那么就
经典图像边缘检测
经典图像边缘检测(微分法思想)——Sobel算子 2008-05-15 15:29Sobel于1970年提出了Sobel算子,与Prewitt算子相比较,Sobel算子对检测点的上下左右进一步加权。其加权模板如下: 经典图像边缘检测(微分法思想)——Roberts交叉算子 2008-05-14 17:16 如果我们沿如下图方向角度求其交叉方向的偏导数,则得到Roberts于1963年提出的交叉算子边缘检测方法。该方法最大优点是计算量小,速度快。但该方法由于是采用偶数模板,如下图所示,所求的(x,y)点处梯度幅度值,其实是图中交叉点处的值,从而导致在图像(x,y)点所求的梯度幅度值偏移了半个像素(见下图)。
上述偶数模板使得提取的点(x,y)梯度幅度值有半个像素的错位。为了解决这个定位偏移问题,目前一般是采用奇数模板。 奇数模板: 在图像处理中,一般都是取奇数模板来求其梯度幅度值,即:以某一点(x,y)为中心,取其两边相邻点来构建导数的近似公式:
这样就保证了在图像空间点(x,y)所求的梯度幅度值定位在梯度幅度值空间对应的(x,y)点上(如下图所示)。 前面我们讲过,判断某一点的梯度幅度值是否是边缘点,需要判断它是否大于设定的阈值。所以,只要我们设定阈值时考虑到加权系数产生的影响便可解决,偏导数值的倍数不是一个问题。 经典图像边缘检测(微分法思想)——Prewitt算子 2008-05-15 11:29 Prewitt算子 在一个较大区域中,用两点的偏导数值来求梯度幅度值,受噪声干扰很大。若对两个点的各自一定领域内的灰度值求和,并根据两个灰度值和的差来计算x,y的偏导数,则会在很
对数函数知识点
对数函数知识点 1 ?对数函数的概念 形如y =log a x(a . 0且a = 1)的函数叫做对数函数. 说明:(1) 一个函数为对数函数的条件是: ①系数为1 ; ②底数为大于0且不等于1的正常数; ③自变量为真数? 对数型函数的定义域: 特别应注意的是:真数大于零、底数大于零且不等于1。 2、由对数的定义容易知道对数函数y二log a x(a ? 0,a = 1)是指数函数y=a x(a .0,a=1)的反函数。 反函数及其性质 ①互为反函数的两个函数的图象关于直线y=x对称。 ②若函数y = f(x)上有一点(a,b),则(b,a)必在其反函数图象上,反之若(b, a)在反函数图象上,则(a,b)必在原函数图象上。 ③利用反函数的性质,由指数函数y二a x(a .0,a")的定义域x R,值域y?0, 容易得到对数函数y"og a x(a .0,a=1)的定义域为x 0,值域为R,利用上节学过的 对数概念,也可得出这一点。 3 4
要牢记y = 2X, y =(1)x, y = 10x, y = (£)x的反函数 y =log2X, y =log! x, y =lg x, y =log ! x的图象,并由此归纳出表中结论。 2 10 5、比较大小 比较对数的大小,一般遵循以下几条原则: ①如果两对数的底数相同,则由对数函数的单调性(底数a -1为增;0 :::a :::1为减)比较。 ②如果两对数的底数和真数均不相同,通常引入中间变量进行比较。 ③如果两对数的底数不同而真数相同,女口y = log ai x与y = log a2x的比较(a 0,印=1, a2 0,a2 = 1). 当a, a2 ? 1时,曲线y1比y的图象(在第一象限内)上升得慢,即当x 1时,m;当0:::x”:1时,y1 y2.而在第一象限内,图象越靠近x轴对数函数的底数越大(同[考题2]的含义)当0 ::: a? ::? <1时,曲线y比月2的图象(在第四象限内)下降得快,即当x 1时, y ■■■ y ;当0 ”:x ::: 1时,y1 y即在第四象限内,图象越靠近x轴的对数函数的底数越小。 6、求参数范围 凡是涉及对数的底含参数的问题,要注意对对数的底数的分析,需要分类讨论时,一定 要分类讨论。
图像边缘检测各种算子MATLAB实现以及实际应用
《图像处理中的数学方法》实验报告 学生姓名:赵芳舟 教师姓名:曾理 学院:数学与统计学院 专业:信息与计算科学 学号: 联系方式: 梯度和拉普拉斯算子在图像边缘检测中的应用
一、数学方法 边缘检测最通用的方法是检测灰度值的不连续性,这种不连续性用一阶和二阶导数来检测。 1.(1)一阶导数:一阶导数即为梯度,对于平面上的图像来说,我们只需用到二维函数 的梯度,即:,该向量的幅值: ,为简化计算,省略上式平方根,得到近似值;或通过取绝对值来近似,得到:。 (2)二阶导数:二阶导数通常用拉普拉斯算子来计算,由二阶微分构成: 2.边缘检测的基本思想: (1)寻找灰度的一阶导数的幅度大于某个指定阈值的位置; (2)寻找灰度的二阶导数有零交叉的位置。 3.几种方法简介 (1)Sobel边缘检测器:以差分来代替一阶导数。Sobel边缘检测器使用一个3×3邻域的行和列之间的离散差来计算梯度,其中,每行或每列的中心像素用2来 加权,以提供平滑效果。 -1-21 000 121 -101 -202 -101
(2)Prewitt边缘检测器:使用下图所示模板来数字化地近似一阶导数。与Sobel检测器相比,计算上简单一些,但产生的结果中噪声可能会稍微大一些。 -1-1-1 000 111 -101 -101 -101 (3)Roberts边缘检测器:使用下图所示模板来数字化地将一阶导数近似为相邻像素之间的差,它与前述检测器相比功能有限(非对称,且不能检测多种45°倍数的边缘)。 -10 01 0-1 10 (4)Laplace边缘检测器:二维函数的拉普拉斯是一个二阶的微分定义: 010 1-41 010
LOG算子实验报告
实习5 对下图施加高斯噪声,采用LoG 算子对含噪声的图象实施边缘分割,找出该图象的最佳边缘。 原理: 1,图象工程的基本内容: (1)图像处理的重要任务就是对图像中的对象进行分析和理解。 (2)图像分析主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息,从而建立对图像的描述。 (3)图像理解的重点是在图像分析的基础上,进一步研究图像中各目标的性质和它们之间的相互联系,并得出对原始客观场景的解释,从而指导和规划行动。 在对图像处理的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些感兴趣的部分常称为目标或对象,它们一般对应图像中特定的、具有独特性质的区域。图像分割是指根据灰度、彩色、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些特征在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同,即在一幅图像中把目标从背景中分离出来,以便于进一步处理。图像分割就是指把图像分成互不重叠的区域并提取出感兴趣目标的技术。 图像分割可借助集合概念用如下方法定义: 令集合R 代表整个图像区域,对R 的分割可看做将R 分成若干个满足以下5个条件的非空的子集(子区域)R1,R2,…,Rn(其中P(Ri)是对所有在集合Ri 中元素的逻辑谓词,?是空集): ②对所有的i 和j ,i ≠j ,有Ri ∩Rj = ? ③对i =1,2,…,n ,有P(Ri)=TRUE ; ④对i ≠j ,有P(Ri ∪Rj)=FALSE ; ⑤对i =1,2,…,n ,Ri 是连通的区域。 条件①指出对一幅图像的分割结果中全部区域的总和(并集)应能包括图像的所有像素(即原图像);条件②指出分割结果中各个区域是互不重叠的,或者说在分割结果中一个像素不能同时属于两个区域; 条件③指出属于同一个区域的像素应该具有某些相同特性;条件④指出分割结果中属于不同区域的像素应该具有一些不同的特性;条件⑤要求分割结果中同一个区域内的任意两个像素在该区域内互相连通,或者说分割得到的区域是一个连通成分。 图像的分割有很多种类,边缘分割也有很多种类,LoG 算子是其中一类 由于在成像时,一个给定像素所对应的场景点,它的周围点对该点的贡献的光强大小呈正态分布,所以平滑函数应能反映不同远近的周围点对给定像素具有不同的平滑作用,因此,平滑函数采用正态分布的高斯函数,即 式中,s 是方差。 用h(x ,y)对图像f(x ,y)的平滑可表示为 g(x ,y)=h(x ,y)*f(x ,y) 22 22e ),(σy x y x h +-=
Sobel边缘检测算子
经典边缘检测算子比较 一 各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a )图像灰度变化 (b )一阶导数 (c )二阶导数 基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22?(Roberts 算子)或者33?模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 1 Roberts (罗伯特)边缘检测算子 景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。 设(,)f x y 是图像灰度分布函数; (,)s x y 是图像边缘的梯度值;(,)x y ?是梯度的方向。则有 [][]{} 1 2 22 (,)(,)(,)(,)(,)s x y f x n y f x y f x y n f x y = +-++- (1) (n=1,2,...) [][]{}1 (,)tan (,)(,)/(,)(,)x y f x y n f x y f x n y f x y ?-=+-+- (2)
对数与对数函数知识梳理
对数与对数函数 【考纲要求】 1.掌握对数的概念、常用对数、对数式与指数式互化,对数的运算性质、换底公式与自然对数; 2.掌握对数函数的概念、图象和性质. 3.正确使用对数的运算性质;底数a 对图象的影响及对数函数性质的作用. 4.通过对指数函数的概念、图象、性质的学习,培养观察、分析归纳的能力,进一步体会数形结合的思想方法; 【知识网络】 【考点梳理】 考点一、对数概念及其运算 我们在学习过程遇到2x =4的问题时,可凭经验得到x=2的解,而一旦出现2x =3时,我们就无法用已学过的知识来解决,从而引入出一种新的运算——对数运算. (一)对数概念: 1.如果()01b a N a a =>≠,且,那么数 b 叫做以a 为底N 的对数, 记作:log a N=b.其中a 叫做对数的底数,N 叫做真数. 2.对数恒等式: log log a b N a a N a N N b ?=?=?=? 3.对数()log 0a N a >≠,且a 1具有下列性质: (1)0和负数没有对数,即0N >; (2)1的对数为0,即log 10a =; (3)底的对数等于1,即log 1a a =. (二)常用对数与自然对数 通常将以10为底的对数叫做常用对数,N N lg log 10简记作. 以e 为底的对数叫做自然对数, log ln e N N 简记作. (三)对数式与指数式的关系 由定义可知:对数就是指数变换而来的,因此对数式与指数式联系密切,且可以互相转化. 它们的关系可由下图表示. 对数与对数函数 图象与性质 对数运算性质 对数函数的图像与 对数的概念 指对互化运算
数字图像课程设计报告:边缘检测算子的比较
数字图像处理课程设计报告题目数字图像课程设计—各边缘检测算子的对比 系别电气系 班级xxxxxxxxxxxxx学号xxxxxxxxxxxx 姓名xxxx指导老师xxxx 时间xxxxxxx
目录 一、课题设计的任务 (3) 1.1 课题选择 (3) 1.2 课题设计的背景 (3) 二、课题原理简介 (3) 三、经典边缘检测算子性能比较及程序 (6) 3.1MATLAB程序仿真 (6) 3.2实验结果的比较 (10) 四、实验结论 (11) 五、参考文献 (11)
一、课题设计的任务 1.1课题选择 各边缘检测的对比 1.2 课题设计的背景 我们感知外部世界的途径主要是听觉和视觉。而视觉主要是获取图像的信息,例如图片的特征和周围的背景区域的差别。这种灰度或结构等信息的突变,就称之为边缘。图像的边缘对人类视觉而言具有重要意义,有些差别很细微,人眼很难观察,这时就需要计算机图像处理技术,物体边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘。 本次我的课程设计就利用了MATLAB软件,通过实验,对各边缘检测算子进行了对比和研究,例如基于一阶导数的边缘检测算子Roberts算子、Sobel算子,基于二阶导数的拉普拉斯算子,canny边缘检测算子等。并且在4天内完成了课程设计作业,基本达到既定要求。 二、课题原理简介 边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。检测出的边缘并不等同于实际目标的真实边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a)图像灰度变化(b)一阶导数(c)二阶导数 下面是一些主要的边缘检测算子的原理介绍 1 Roberts(罗伯特)边缘检测算子 景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法 是所谓的“梯度检测法”。设(,) s x y是图像边缘的 f x y是图像灰度分布函数;(,) 是梯度的方向。则有 梯度值;(,) x y
高中对数函数公式
指数函数和对数函数 1、指数函数: 定义:函数() y a a a x =>≠01且叫指数函数。 定义域为R ,底数是常数,指数是自变量。 为什么要求函数y a x =中的a 必须a a >≠01且。 因为若a <0时,()y x =-4,当x = 1 4 时,函数值不存在。 a =0,y x =0,当x ≤0,函数值不存在。 a =1时,y x =1对一切x 虽有意义,函数值恒为1,但y x =1的反函数不存在, 因为要求函数y a x =中的a a >≠01且。 1、对三个指数函数y y y x x x ==?? ? ? ?=21210,,的图象的认识。 对图象的进一步认识,(通过三个函数相互关系的比较): ①所有指数函数的图象交叉相交于点(0,1),如y x =2和y x =10相交于()01,, 当x >0时,y x =10的图象在y x =2的图象的上方,当x <0,刚好相反,故有102 2 2 >及1022 2--<。 ②y x =2与y x =?? ?? ?12的图象关于y 轴对称。 ③通过y x =2,y x =10,y x =?? ?? ?12三个函数图象,可以画出任意一个函数y a x =(a a >≠01且)的示意图,如y x =3的图象,一定位于y x =2和y x =10两个图象的中
间,且过点()01,,从而y x =?? ???13也由关于y 轴的对称性,可得y x =?? ? ? ?13的示意图,即 通过有限个函数的图象进一步认识无限个函数的图象。 2、对数: 定义:如果a N a a b =>≠()01且,那么数b 就叫做以a 为底的对数,记作b N a =log (a 是底数,N 是真数,log a N 是对数式。) 由于N a b =>0故log a N 中N 必须大于0。 当N 为零的负数时对数不存在。 (1)对数式与指数式的互化。 由于对数是新学的,常常把不熟悉的对数式转化为指数式解决问题,如: 求log .032524?? ? ? ? 分析:对于初学者来说,对上述问题一般是束手无策,若将它写成log .032524?? ? ? ?=x 再改写为指数式就比较好办。解:设log .032524?? ? ? ?=x 则即∴即032524 8258251 2 5241 212 032.log .x x x = ?? ???=?? ???=- ?? ?? ?=- - 评述:由对数式化为指数式可以解决问题,反之由指数式化为对数式也能解决问题,因此必须因题而异。如求35x =中的x ,化为对数式x =log 35即成。 (2)对数恒等式: 由a N b N b a ==()log ()12 将(2)代入(1)得a N a N log = 运用对数恒等式时要注意此式的特点,不能乱用,特别是注意转化时必须幂的底数和 对数的底数相同。 计算: () 313 2 -log 解:原式==?? ?? ?-=3 131 2 222 13 1 3 log log 。 (3)对数的性质:
经典边缘检测算子对比
经典边缘检测算子比较 张丽 南京信息工程大学信息与计算科学系,南京210044 摘要:图像边缘检测技术是图像分割、目标识别、区域形态提取等图像分析领域中十分重要的基础。本文简要介绍各种经典图像边缘检测算子的基本原理,用Matlab仿真实验结果表明各种算子的特点及对噪声的敏感度,为学习和寻找更好的边缘检测方法提供参考价值。 关键字:图像处理;边缘检测;算子;比较 引言 图像的边缘时图像最基本的特征之一。所谓边缘(或边沿)是指周围像素灰度有阶跃性变化或“屋顶”变化的那些像素的集合。边缘广泛存在于物体与背景之间、物体与物体之间、基元与基元之间,因此它是图像分割依赖的重要特征。图像边缘对图像识别和计算机分析十分有用,边缘能勾划出目标物体,使观察者一目了然;边缘蕴含了丰富的内在信息(如方向、阶跃性质、形状等)。从本质上说,图像边缘是图像局部特性不连续性(灰度突变、颜色突变、纹理结构突变等)的反应,它标志着一个区域的终结和另一个区域的开始。 边缘检测技术是所有基于边界分割的图像分析方法的第一步,首先检测出图像局部特性的不连续性,再将它们连成边界,这些边界把图像分成不同的区域,检测出边缘的图像就可以进行特征提取和形状分析。为了得到较好的边缘效果,现在已经有了很多的边缘检测算法以及一些边缘检测算子的改进算法。但各算子有自己的优缺点和适用领域。本文着重对一些经典边缘检测算子进行理论分析、实际验证并对各自性能特点做出比较和评价,以便实际应用中更好地发挥其长处,为新方法的研究提供衡量尺度和改进依据。 一各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地
边缘检测算子比较
边缘检测算子比较 不同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以分割图像。需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地方,而物体间的边界指的是现实场景中的存在于物体之间的边界。有可能有边缘的地方并非边界,也有可能边界的地方并无边缘,因为现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,目前研究者正在试图在边缘提取中加入高层的语义信息。 课题所用图像边缘与边界应该算是等同的。 在实际的图像分割中,往往只用到一阶和二阶导数,虽然,原理上,可以用更高阶的导数,但是,因为噪声的影响,在纯粹二阶的导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应用价值。二阶导数还可以说明灰度突变的类型。在有些情况下,如灰度变化均匀的图像,只利用一阶导数可能找不到边界,此时二阶导数就能提供很有用的信息。二阶导数对噪声也比较敏感,解决的方法是先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。不过,利用二阶导数信息的算法是基于过零检测的,因此得到的边缘点数比较少,有利于后继的处理和识别工作。 各种算子的存在就是对这种导数分割原理进行的实例化计算,是为了在计算过程中直接使用的一种计算单位; Roberts算子:边缘定位准,但是对噪声敏感。适用于边缘明显且噪声较少的图像分割。Roberts边缘检测算子是一种利用局部差分算子寻找边缘的算子,Robert算子图像处理后结果边缘不是很平滑。经分析,由于Robert算子通常会在图像边缘附近的区域内产生较宽的响应,故采用上述算子检测的边缘图像常需做细化处理,边缘定位的精度不是很高。Prewitt算子:对噪声有抑制作用,抑制噪声的原理是通过像素平均,但是像素平均相当于对图像的低通滤波,所以Prewitt算子对边缘的定位不如Roberts算子。 Sobel算子:Sobel算子和Prewitt算子都是加权平均,但是Sobel算子认为,邻域的像素对当前像素产生的影响不是等价的,所以距离不同的像素具有不同的权值,对算子结果产生的影响也不同。一般来说,距离越远,产生的影响越小。 Isotropic Sobel算子:加权平均算子,权值反比于邻点与中心点的距离,当沿不同方向检测边缘时梯度幅度一致,就是通常所说的各向同性。 在边沿检测中,常用的一种模板是Sobel 算子。Sobel 算子有两个,一个是检测水平边沿的;另一个是检测垂直平边沿的。Sobel算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的,另一个是检测垂直平边沿的。各向同性Sobel 算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。由于建筑物图像的特殊性,我们可以发现,处理该类型图像轮廓时,并不需要对梯度方向进行运算,所以程序并没有给出各向同性Sobel算子的处理方法。 由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数,简单有效,因此应用广泛。美中不足的是,Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们可以给出阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。
指数、对数函数公式
指数函数和对数函数 重点、难点: 重点:指数函数和对数函数的概念、图象和性质。 难点:指数函数和对数函数的相互关系及性质的应用,以及逻辑划分思想讨论函数 y a y x x a ==,log 在a >1及01<≠01且叫指数函数。 定义域为R ,底数是常数,指数是自变量。 为什么要求函数y a x =中的a 必须a a >≠01且。 因为若a <0时,()y x =-4,当x =1 4 时,函数值不存在。 a =0,y x =0,当x ≤0,函数值不存在。 a =1时,y x =1对一切x 虽有意义,函数值恒为1, 但y x =1的反函数不存在,因为要求函数y a x =中的a a >≠01且。 1、对三个指数函数y y y x x x ==?? ? ? ?=21210,,的图 象的认识。 对图象的进一步认识,(通过三个函数相互关系的比较): ①所有指数函数的图象交叉相交于点(0,1),如y x =2和y x =10相交于()01,,当x >0 时,y x =10的图象在y x =2的图象的上方,当x <0,刚好相反,故有10222>及 10222--<。
②y x =2与y x =?? ?? ?12的图象关于y 轴对称。 ③通过y x =2,y x =10,y x =?? ?? ?12三个函数图象,可以画出任意一个函数y a x =(a a >≠01且)的示意图,如y x =3的图象,一定位于y x =2和y x =10两个图象的中 间,且过点()01,,从而y x =?? ???13也由关于y 轴的对称性,可得y x =?? ? ? ?13的示意图,即 通过有限个函数的图象进一步认识无限个函数的图象。 2、对数: 定义:如果a N a a b =>≠()01且,那么数b 就叫做以a 为底的对数,记作b N a =log (a 是底数,N 是真数,log a N 是对数式。) 由于N a b =>0故log a N 中N 必须大于0。 当N 为零的负数时对数不存在。 (1)对数式与指数式的互化。 (2)对数恒等式: 由a N b N b a ==()log ()12 将(2)代入(1)得a N a N log = 运用对数恒等式时要注意此式的特点,不能乱用,特别是注意转化时必须幂的底数和对数的底数相同。 计算: () 313 2 -log 解:原式==?? ?? ?-=3 131 2 222 13 1 3 log log 。 (3)对数的性质: ①负数和零没有对数; ②1的对数是零; ③底数的对数等于1。 (4)对数的运算法则: ①()()log log log a a a MN M N M N R =+∈+ , ②()log log log a a a M N M N M N R =-∈+ , ③()()log log a n a N n N N R =∈+ ④()log log a n a N n N N R =∈+ 1
图像边缘检测算子
课程设计任务书 学院信息科学与工程专业电子信息工程 学生姓名*** 班级学号09******* 课程设计题目图像边缘检测算子 课程设计目的与要求: 设计目的: 1.熟悉几种经典图像边缘检测算子的基本原理。 2.用Matlab编程实现边缘检测,比较不同边缘检测算子的实验结果。设计要求: 1.上述实验内容相应程序清单,并加上相应的注释。 2.完成目的内容相应图像,并提交原始图像。 3.用理论对实验内容进行分析。 工作计划与进度安排: 2012年 06月29 日选题目查阅资料 2012年 06月30 日编写软件源程序或建立仿真模块图 2012年 07月01 日调试程序或仿真模型 2012年 07月01 日结果分析及验收 2012年 07月02 日撰写课程设计报告、答辩 指导教师: 2012年 6月29日专业负责人: 2012年 6月29日 学院教学副院长: 2012年 6月29日
摘要 边缘检测是数字图像处理中的一项重要内容。本文对图像边缘检测的几种经典算法(Roberts算子、Sobel算子、Prewitt算子)进行了分析和比较,并用MATLAB实现这几个算法。最后通过实例图像对不同边缘检测算法的效果进行分析,比较了不同算法的特点和适用范围。 关键词:图像处理;边缘检测;Roberts算子;Sobel算子;Prewitt算子
目录 第1章相关知识.................................................................................................... IV 1.1 理论背景 (1) 1.2 数字图像边缘检测意义 (1) 第2章课程设计分析 (3) 2.1 Roberts(罗伯特)边缘检测算子 (3) 2.2 Prewitt(普瑞维特)边缘检测算子 (4) 2.3 Sobel(索贝尔)边缘检测算子 (5) 第3章仿真及结果分析 (7) 3.1 仿真 (7) 3.2 结果分析 (8) 结论 (10) 参考文献 (11)
对人脸边缘检测的几种算子实验比对
第07卷2007盔第06期 06月 V01.7 June No06 2007 对人脸边缘检测的几种算子实验比对 王晓红熊盛武 摘要:对于图像处理的一个研究分支一人脸识别与检测,自美国“9.11”事件后被广泛重视,并正在从实验室走向商业化。在这个过程中,科技工作者们有着众多不同的尝试方式,本文就一些经典的算法公式,选择不同的算子,通过MATLAB语言表现出来。 关键词:模式识别图像处理人脸检测算子 中图分类号:TP391.41文献标识码:A文章编号:1006-7973(2007)06-0145-02 一、前言 纵观人类历史,从制造简单的工具,到钻木取火;从四大发明到蒸汽机的使用;作为万物之灵的人类还制造了汽车、飞机、无线电、太空船…..直到一九四六年第一台计算机的出现,人类所发明的工具才真正有了和人类自身大脑作比较的工具一电脑!人类一直梦想着更接近于人的电脑来沿伸人 类大脑的工作。这就有了“fifthgenerationcomputer'’,这是日本在上世纪八十年代初制定的国家十年计划的目标:听得懂话,可识别图像,可以自我学习、可以判断和思考等等具有智能的计算机。可是时间已经过去了二十多年了,这个目标还没有实现。说明还有许多技术上的瓶颈还有待突破。想要让计算机做到以前只能由人类才能做到的事情,具备人的智能,具有对各种事件进行分析、判断的能力,还有很多的路要走。下面仅从识别图像这个方向来探讨人脸的识别。 二、人脸识别的发展现状 生物特征的识别技术从20世纪末兴起,伴随计算机硬件和信息技术的飞速发展使得地球变成了“地球村”,经过使人震惊的“9?11”事件后,现代社会对身份识别提出了更多、更高的要求。生物识别在图像识另Ⅱ领域也受到了空前的重视。生物识别技术已经在商业方面有了许多应用,并有不断纵深的趋势。据国际生物集团(InternationalBiometricGroup,IBG)的统计:到2007年将达到40亿美元。并且美国在“9?11”遇袭事件后,连续签署了3个国家安全法案(爱国者法案、航空安全法案、边境签证法案),要求必须采用生物认证技术。这对生物识别技术的应用起到了推波助澜的作用。 所谓生物特征的识别(BiometricIdentificationTechnology),就是利用人所特有的生物特征,包括生理特征和行为特征,用这些特征来进行人的身份鉴别。常用的有:脸相、虹膜、指纹、掌纹等;常用的行为特征包括:声音、笔迹、步姿等。生物特征具有以下一些特点:比如说人都有手掌,但每个人的掌纹都不一样,且这种独有的唯一的特征并不随时间变化而变化;在实际的应用中,人类特有的这些特征是可采集的,人脸的识别正是符合了这样一些特点,并且人脸识别的特点是以人为准,最大程度地确保了鉴别的可靠性。 三、人脸识别与其它识别技术的区别 在这些识别技术中,人脸识别技术(FaceRecognitionTechniques,FRT)是采用人的面部特征来确定一个人身份的,是生物特征识别技术的一个主要方向。和其他生物特征比,人脸特征的提取更具有主动、友善、无打扰等优点,基于这些特点,人脸识别技术才成为被广泛使用的方法。但是,人脸不是一成不变的,同一个人在不同的年龄段会有变化,另外光线、姿势、面部表情、面部附属物(如胡子、眼镜)等变化的影响,人脸的识别的准确度会大打折扣。就目前而言,大多的人脸识别系统还远未达到人类婴幼儿的识别能力,因此,人脸识别还有许多工作可做。 四、人脸识别方法之一——人脸检测的边缘检测方法 人脸识另lj技术包涵的内容很多,如模式识别、图像处理、计算机视觉、计算机图形学、各种数学算法的引用等等。 对于人脸的识别其首要目的是能够在图片中检测出来人脸来,即人脸检测,而人脸的检测最重要的是对其边缘的提取。图像的边缘点产生的原因虽然不同,但归根结底都是由于图像的灰度不连续或者灰度急剧变化的所造成的,利用这个特性,我们可以采用微分运算,得到边缘点,从而得到人脸的轮廓。 边缘检测是根据图像的灰度值或者色彩的急剧变化的特点,采用各种微分运算进行边缘检测的。下面就几种微分法进行理论比较。 首先需要介绍微分的原理: Af(i,j)=[,(?+1,j)一f(i,j)】十[厂(j,J+1)一f(i,j)】 m¨=誓+熹 为方便编程离散化后的差分方程为: 收稿日期:2007—3—21 作者简介:王晓红女武汉理工大学硕士研究生武汉商业服务学院讲师熊盛武男武汉理工大学教授博导 万方数据
对数函数公式.pdf
指数函数和对数函数 y a a a x =>≠01且定义域为R ,底数是常数,指数是自变量。a 必须a a >≠01且。 如果 a N a a =>≠()01且,那么数 b 就叫做以a 为底的对数,记作b N a =log (a 是底数,N 是真数,log a N 是对 数式。)由于N a b =>0故log a N 中N 必须大于0。 当N 为零的负数时对数不存在 求35x =中的x ,化为对数式x =log 35即成。 对数恒等式:由a N b N b a ==()log ()12a N a N log =对数的性质:①负数和零没有对数; ②1的对数是 零; ③底数的对数等于1。对数的运算法则: ()() log log log a a a MN M N M N R =+∈+ , ()log log log a a a M N M N M N R =?∈+,()() log log a n a N n N N R =∈+ () log log a n a N n N N R =∈+1 3、对数函数:定义:指数函数y a a a x =>≠()01且的反函数y x a =log x ∈+∞(,)0叫做对数函数。 1、对三个对数函数y x y x ==log log 212 ,,y x =lg 的图象的认识。:
4、对数换底公式: log log log log (.)log b a a n e g N N b L N N e N L N N = ===其中…称为的自然对数称为常数对数 27182810 由换底公式可得: L N N e N N n = ==lg lg lg ..lg 04343 2303 由换底公式推出一些常用的结论: (1) log log log log a b a b b a b a = =11或· (2)log log a m a n b m n b = (3)log log a n a n b b = (4)
log算子 和dog 算子
log算子和dog 算子 背景引言 在博文差分近似图像导数算子之Laplace算子中,我们提到Laplace算子对通过图像进行操作实现边缘检测的时,对离散点和噪声比较敏感。于是,首先对图像进行高斯暖卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测,就可以提高算子对噪声和离散点的Robust, 这一个过程中Laplacian of Gaussian(LOG)算子就诞生了。本节主要介绍LOG算子基本理论数学分析比较多些,最后,贴出用Mathcad软件实现的LOG代码。 基本理论 高斯卷积函数定义为: 而原始图像与高斯卷积定义为: 因为: 所以Laplacian of Gaussian(LOG)可以通过先对高斯函数进行偏导操作,然后进行卷积求解。公式表示为: 和 因此,我们可以LOG核函数定义为:
高斯函数和一级、二阶导数如下图所示: Laplacian of Gaussian计算可以利用高斯差分来近似,其中差分是由两个高斯滤波与不同变量的卷积结果求得的 从两个平平滑算子的差分得出的是二阶边缘检测,反直观。近似计算可能如下图所示。图中一维空间,不同变量的两个高斯分布相减形成一个一维算子
参考代码 计算LOG算子模板系数的式(4.27)实现如下代码: 此函数包括一个正规函数,它确保模板系数的总和为1. 以便在均匀亮度区域不会检测到边缘。 参考资料 [1] Laplacian of Gaussian https://www.360docs.net/doc/c415151098.html,/e161/lectures/gradient/node9.html. [2] Rafael C.Gonzalez, RechardE.Woods at. el , "Digital Image Processing Using MatLab (Second Editon)",Gatesamark Publishing. 关于Image Engineering & Computer Vision的更多讨论与交流,敬请关注本博和新浪微博 songzi_tea DOG算子 分类:【Computer Vision】2013-11-10 15:06 352人阅读评论(0) 收藏举报