力学#形心与静矩
Centroid and static moment of section截面的形心和静矩 B.1
在杆件的应力和变形公式中,遇到一些几何量,例如面积、静矩、形心位置、极惯性矩和轴惯性矩
等,这些量只与构件的横截面形状和尺寸有关,而与构件的受力无关,称它们为截面的几何性质截面几何性质的计算在分析杆的强度和刚度时非常重要,首先应明确截面几何性质的定义,并熟练
地掌握其计算方法。形心与静矩1.
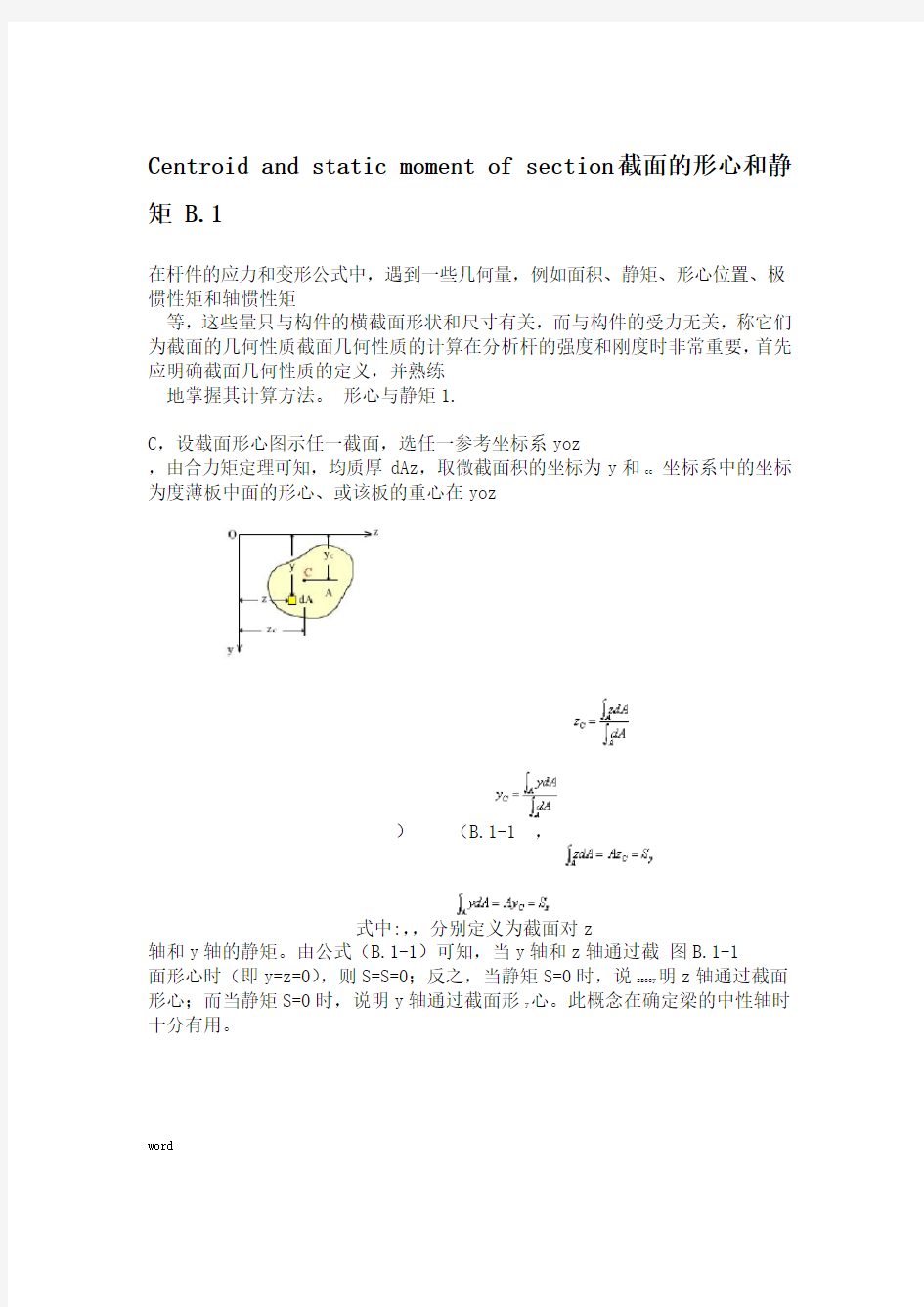
C,设截面形心图示任一截面,选任一参考坐标系yoz
,由合力矩定理可知,均质厚dAz,取微截面积的坐标为y和cc坐标系中的坐标为度薄板中面的形心、或该板的重心在yoz
)(B.1-1 ,
式中:,,分别定义为截面对z
轴和y轴的静矩。由公式(B.1-1)可知,当y轴和z轴通过截图B.1-1
面形心时(即y=z=0),则S=S=0;反之,当静矩S=0时,说zzccy明z轴通过截面形心;而当静矩S=0时,说明y轴通过截面形y心。此概念在确定梁的中性轴时十分有用。
word
编辑版.
组合截面的形心与静矩2.
在工程实际中,经常遇到形状较为复杂的截面,它们由
。若干简单截面或标准型材组合而成,称为组合截面(图B.1-2)
n个部分,形心坐标为当确定它们的形心时,可将其分割成
(B.1-2)
,的形心在参考系中的坐为Az为分割后的各面积,y和式中A iiii标。图B.1-2
;,称为组合截面的静矩。式中
B.2 极惯性矩 Polar momet of inertia
1. 定义
任意形状的截面如图所示,设其面积为A,在矢径为处取一微面积dA,定义
截面对原点O的极惯性矩为
(B.2-1)
4),它恒为正。mm次方( 4极惯性矩的量纲为长度的 B.2-1 图
word
编辑版.
2. 圆截面的极惯性矩
),(图图示圆截面,取微面积为一薄壁环,即B.2-2
)的极惯性矩分读者自行证明实心圆、空心圆和薄壁圆截面(图B.2-3 别为:
B.2-2)(
( B.2-3)图B.2-2
)(B.2-4
式中,d—空心圆内径,D—空心圆外径,R—薄壁圆平均半径。0
图B.2-3
B.3 轴惯性矩 Second Axial moment of area and Parallel Axis Theory
1. 定义word
编辑版.
),zA 任意形状的截面如图所示,设其面积为,在坐标为(y y,定义截面对dA处取一微面积和z轴的惯性矩为
B.3-1 )(,4),恒为正。其量纲为长度的四次方(mm
,于是得出极惯性矩和轴惯性矩之间的关系为由于 B.3-1 图
)(B.3-
简单截面的轴惯性矩2.
的矩形,计算矩形截面对形心bh,宽为矩形:如图所示高为?,则的惯性矩。取dA=bdy轴z和y
B.3-3)(
同理得: B.3-2 图
):B.3-2和z的惯性矩可借助公式(圆形:如计算圆截面对形心轴y?
对于圆截面:,代入上式得:
于是,实心圆、空心圆、薄壁圆截面的轴惯性矩分别为
B.3-4()
word
编辑
版.
()B.3-5
( B.3-6)
—薄壁圆平均半径。—空心圆内径,D—空心圆外径,R式中,d0
平行轴间惯性矩的移轴公式3.对简单截面而言,它们对自身形心轴的惯性矩很
容易计算,如矩形、圆形、三角形等,并有现成表
为截面的一z所示,设y、格可查附录C,本节研究截面对任一根与形心轴平行之轴的惯性矩。如图B.3-300
和z的惯性矩为:对形心轴,如果截面对形心轴的惯性矩为和,则截面对任一平行于它的轴y
B.3-7)(,a为截面面积,)。式中(Parallel axis theoremA 上式称为惯性轴的移轴公式或称平行轴定理之间的垂直距离。z和z和和b分别为坐标轴yy以及00
:证明如下 z轴的惯性矩的定义,。根据面积对
,代入上式,得轴的垂直距离为距z y=y+b中微面积图B.3-3dA0
式中,故,同理得如为组合截面,则上式表示为
B.3-3 图
B.3-8(),word
编辑版.
z轴的静矩和惯性矩:读者自行计算下图各截面对
图B.3-4
4. 例题试计算三角形截面对形心轴z的惯性矩。
结构力学图乘法
§4-6 图乘法 我们已经知道,计算荷载作用下结构的弹性位移时,需要求下列形式的积分 ? ds EI M M K i 的数值。这里,i M 、K M 是两个弯矩函数的乘积。对于直杆或直杆的一段,若EI 是常量,且积分号内的两个弯矩图形中有一个是直线图形,则可用图乘法计算积分,极为方便。 下面说明图乘法的内容和应用 图4-20所示为直杆AB 的两个弯矩图,其中i M 图为一直线。如果该杆截面抗弯刚度EI 为一常数,则 ? ?= dx M M EI dx EI M M K i K i 1 (a) 以O 为原点,以α表示i M 图直线的倾角,则i M 图上任一点标距(纵坐标)可表示为 α?=tan x M i 因此, ??α=B A K B A K i dx xM dx M M tan (b ) 式中,dx M K 可看作K M 图的微分面积(图4-20中画阴影线的部分);dx M x K ?是这个微分面积对y 轴的面积矩。于是?B A K dx xM 就是K M 图的面积ω对y 轴的 面积矩。以0x 表示K M 图的形心C 到y 轴的距离,则 0x dx xM B A K ω=? 将上式代人式(b ),得到 00tan y x dx M M B A K i ω=ω?α=? (c) 其中,0y 是在K M 图形心C 对应处的i M 图标距。利用式(c ),式(a )可写成
1y EI dx EI M M B A K i ω= ? (4- 29) 这就是图乘法所使用的公式。它将式(a )形式的积分运算问题简化为求图形的面积、形心和标距的问题。 应用图乘法计算时要注意两点: (1)应用条件:杆件应是等截面直杆,两个图形中应有一个是直线,标距0y 应取自直线图中。 (2)正负号规则:面积ω与标距0y 在杆的同一边时,乘积0y ω取正号;ω与0y 在杆的不同边时取负号。 图4-21给出了位移计算中几种常见图形的面积和形心的位置。用抛物线 图形的公式时,必须注意在抛物线顶点处的切线应与基线平行。 下面指出应用图乘法时的几个具体问题。 (1)如果两个图形都是直线图形,则标距0y 可取自其中任一个图形。 (2)如果一个图形是曲线,另一个图形是由几段直线组成的折线,则应分段考虑。对于图 4-22所示的情形,则有 3 32 211y y y dx M M K i ω+ω+ω=? (3)如果图形比较复杂,则可将其分解为简单图形来考虑。
截面形心和惯性矩的计算
截面形心和惯性矩的计算
————————————————————————————————作者:————————————————————————————————日期:
工程构件典型截面几何性质的计算 2.1面积矩 1.面积矩的定义 图2-2.1任意截 面的几何图形 如图2-31所示为一任意截面的 几何图形(以下简称图形)。定义:积分和 分别定义为该图形对z轴和y轴的面积矩或静矩,用符号S z和S y,来表示,如式(2—2.1) (2—2.1)面积矩的数值可正、可负,也可为零。面积矩的量纲是长度的三次方,其常用单位为m3或mm3。 2.面积矩与形心 平面图形的形心坐标公式如式(2—2.2) (2—2.2) 或改写成,如式(2—2.3) (2—2.3) 面积矩的几何意义:图形的形心相对于指定的坐
标轴之间距离的远近程度。图形形心相对于某一坐标距离愈远,对该轴的面积矩绝对值愈大。 图形对通过其形心的轴的面积矩等于零;反之,图形对某一轴的面积矩等于零,该轴一定通过图形形心。 3.组合截面面积矩和形心的计算 组合截面对某一轴的面积矩等于其各简单图形对该轴面积矩的代数和。如式(2—2.4) (2—2.4)式中,A和y i、z i分别代表各简单图形的面积和形心坐标。组合平面图形的形心位置由式(2—2.5)确定。 (2—2.5) 2.2极惯性矩、惯性矩和惯性积 1.极惯性矩 任意平面图形如图2-31所示,其面积为A。定义:积分称为图形对O点的极惯性矩,用符号I P,表示,如式(2—2.6) (2—2.6) 极惯性矩是相对于指定的点而言的,即同一图形对不同的点的极惯性矩一般是不同的。极惯性矩恒为正,
静矩和形心
附录I 平面图形的几何性质 §I-1 静矩和形心 §I-2 惯性矩和惯性半径 §I-3 惯性积 §I-4 平行移轴公式 §I-5 转轴公式与主惯性轴 §I-1 静矩和形心 1. 静矩定义: ? ? ? ??==??A y A Z zdA S ydA S (1)静矩是对坐标而言的,同一图形对不同坐标轴静矩不同(面积对轴的一次矩)。 (2)静矩可正值,可为负,亦可为零。 (3)量纲为长度的三次方。 2.形心坐标计算公式 (1)合力矩定理——合力对某轴之矩,等于其各分对同一轴力矩的代数和。 (2)静面矩定理——总面积对某轴之矩,等于其各分面积对同一轴之矩的代数和。
? ??????== ? ? ? ==A S z A S y z A S y A S y z y Z ·· (3)若某轴过形心,则图对该轴静矩为零。反之若图形对某轴静为零,则该轴过形心。 Example 试用积分法求图示图形对y 轴的静矩S y ,并求形心坐标Z 。 Solution 以y 、z 为参考坐标轴 ①dz Z b a ydz dA n n = = 2 2·2 0210+= += ===++?? ?n ab n z b a dz Z b a dz Z b a Z zdA S b n n A b o n n n n b y ② ()11100+=+====+???n ab n b ab dz Z b a ydz dA A n n b n n b A ()2 1122++= ++==n b n n ab n ab A S Z y 3.组合图形静矩计算及形心坐标确定。 (1) 组合图形:有若干简单图形(如矩形、圆形、三角形)组
力学#形心与静矩(试题学习)
B.1 截面的形心和静矩Centroid and static moment of section 在杆件的应力和变形公式中,遇到一些几何量,例如面积、静矩、形心位置、极惯性矩和轴惯性矩等,这些量只与构件的横截面形状和尺寸有关,而与构件的受力无关,称它们为截面的几何性质 截面几何性质的计算在分析杆的强度和刚度时非常重要,首先应明确截面几何性质的定义,并熟练地掌握其计算方法。 1. 形心与静矩 图B.1-1 图示任一截面,选任一参考坐标系yoz,设截面形心C 的坐标为y c 和z c ,取微截面积dA,由合力矩定理可知,均质厚度薄板中面的形心、或该板的重心在yoz坐标系中的坐标为 , (B.1-1) 式中:,,分别定义为截面对z 轴和y轴的静矩。由公式(B.1-1)可知,当y轴和z轴通过截 面形心时(即y c =z c =0),则S z =S y =0;反之,当静矩S z =0时,说 明z轴通过截面形心;而当静矩S y =0时,说明y轴通过截面形心。此概念在确定梁的中性轴时十分有用。
2. 组合截面的形心与静矩 图B.1-2 在工程实际中,经常遇到形状较为复杂的截面,它们由若干简单截面或标准型材组合而成,称为组合截面(图B.1-2)。当确定它们的形心时,可将其分割成n个部分,形心坐标为 , (B.1-2) 式中A i 为分割后的各面积,y i 和z i 为A i 的形心在参考系中的坐标。 式中;,称为组合截面的静矩。 B.2 极惯性矩Polar momet of inertia 1. 定义 图B.2-1 任意形状的截面如图所示,设其面积为A,在矢径为处取一微面积dA,定义截面对原点O的极惯性矩为 (B.2-1) 极惯性矩的量纲为长度的4次方(mm4),它恒为正。
力学#形心与静矩
Centroid and static moment of section截面的形心和静矩 B.1 在杆件的应力和变形公式中,遇到一些几何量,例如面积、静矩、形心位置、极惯性矩和轴惯性矩 等,这些量只与构件的横截面形状和尺寸有关,而与构件的受力无关,称它们为截面的几何性质截面几何性质的计算在分析杆的强度和刚度时非常重要,首先应明确截面几何性质的定义,并熟练 地掌握其计算方法。形心与静矩1. C,设截面形心图示任一截面,选任一参考坐标系yoz ,由合力矩定理可知,均质厚dAz,取微截面积的坐标为y和cc坐标系中的坐标为度薄板中面的形心、或该板的重心在yoz )(B.1-1 , 式中:,,分别定义为截面对z 轴和y轴的静矩。由公式(B.1-1)可知,当y轴和z轴通过截图B.1-1 面形心时(即y=z=0),则S=S=0;反之,当静矩S=0时,说zzccy明z轴通过截面形心;而当静矩S=0时,说明y轴通过截面形y心。此概念在确定梁的中性轴时十分有用。 word
编辑版. 组合截面的形心与静矩2. 在工程实际中,经常遇到形状较为复杂的截面,它们由 。若干简单截面或标准型材组合而成,称为组合截面(图B.1-2) n个部分,形心坐标为当确定它们的形心时,可将其分割成 (B.1-2) ,的形心在参考系中的坐为Az为分割后的各面积,y和式中A iiii标。图B.1-2 ;,称为组合截面的静矩。式中 B.2 极惯性矩 Polar momet of inertia 1. 定义 任意形状的截面如图所示,设其面积为A,在矢径为处取一微面积dA,定义
截面对原点O的极惯性矩为 (B.2-1) 4),它恒为正。mm次方( 4极惯性矩的量纲为长度的 B.2-1 图 word 编辑版. 2. 圆截面的极惯性矩 ),(图图示圆截面,取微面积为一薄壁环,即B.2-2 )的极惯性矩分读者自行证明实心圆、空心圆和薄壁圆截面(图B.2-3 别为: B.2-2)( ( B.2-3)图B.2-2 )(B.2-4 式中,d—空心圆内径,D—空心圆外径,R—薄壁圆平均半径。0
惯性矩、静矩-形心坐标公式
惯性矩、静矩-形心坐标公式
§I?1 截面的静矩和形心位置 如图I ?1所示平面图形代表一任意截面,以下两积分 ? ??? ?==??A z S A y S A y A z d d (I?1) 分别定义为该截面对于z 轴和y 轴的静矩。 静矩可用来确定截面的形心位置。由静力学中确定物体重心的公式可得 ? ??? ???== ??A A z z A A y y A C A C d d 利用公式(I?1),上式可写成 ? ??? ? ? ?====??A S A A z z A S A A y y y A C z A C d d (I?2) 或 ? ? ?==C y C z Az S Ay S (I?3) ???????= = A S z A S y y C z C (I?4) 图
如果一个平面图形是由若干个简单图形组成的组合图形,则由静矩的定义可知,整个图形对某一坐标轴的静矩应该等于各简单图形对同一坐标轴的静矩的代数和。即: ?? ??? ?? ==∑∑==n i ci i y n i ci i z z A S y A S 11 (I?5) 式中A i 、y ci 和z ci 分别表示某一组成部分的面积和其形心坐标,n 为 简单图形的个数。 将式(I ?5)代入式(I ?4),得到组合图形形心坐标的计算公式为 ??????????? ?? ==∑∑∑∑====n i i n i ci i c n i i n i ci i c A z A z A y A y 11 1 1(I ?6) 例题I ?1 图a 所示为对称T 型截面,求该截面的形心位置。 解:建立直角坐标系zOy ,其中y 为截面的对称轴。因图形相对于y 轴对称,其形心一定在该对称轴上,因此z C =0,只需计算y C 值。将截面分成Ⅰ、Ⅱ两个矩形,则 A Ⅰ=0.072m 2,A Ⅱ =0.08m 2 y Ⅰ=0.46m ,y Ⅱ=0.2m y C 0.12m 0.4m y y 0.6m 0.2m O y z Ⅰ Ⅱ C C C 例 题
结构力学知识点总结
1.关于∞点和∞线的下列四点结论: (1) 每个方向有一个∞点(即该方向各平行线的交点)。 (2) 不同方向上有不同的∞点。 (3) 各∞点都在同一直线上,此直线称为∞线。 (4) 各有限远点都不在∞线上。 2.多余约束与非多余约束是相对的,多余约束一般不是唯一指定的。一个体系中有多个约束时,应当分清多余约束和非多余约束,只有非多余约束才对体系的自由度有影响。 [ 3.W>0, 缺少足够约束,体系几何可变。W=0, 具备成为几何不变体系所要求 的最少约束数目。W<0, 体系具有多余约束。 4.一刚片与一结点用两根不共线的链杆相连组成的体系内部几何不变且无多余约束。 两个刚片用一个铰和一根不通过此铰的链杆相联,组成无多余约束的几何不变体系。 两个刚片用三根不全平行也不交于同一点的链杆相联,组成无多余约束的几何不变体系。 三个刚片用不在同一直线上的三个单铰两两相连,组成无多余约束的几何不变体系。 { 5.二元体规律: 在一个体系上增加或拆除二元体,不改变原体系的几何构造性质。 6.形成瞬铰(虚铰)的两链杆必须连接相同的两刚片。 7.w=s-n ,W=0,但布置不当几何可变。自由度W >0 》 但W ≤0仅是体系几何不变的必要条件。S=0, 8..轴力FN --拉力为正; 剪力FQ--绕隔离体顺时针方向转动者为正; 弯矩M--使梁的下侧纤维受拉者为正。 弯矩图 --习惯绘在杆件受拉的一侧,不需标正负号; ^ 轴力和剪力图--可绘在杆件的任一侧,但需标明正负号。 9.剪力图上某点处的切线斜率等于该点处荷载集度q 的大小 ; 弯矩图上某点处的切线斜率等于该点处剪力的大小。 ) ()()Q dM x dF x dx =22 () ()()Q dF x d M x q y dx dx ==-FN N FQ+dF Q Q x x