刘豹 现代控制理论 习题解答
天津大学刘豹主编《现代控制理论》习题解答R O n e i (李荣辉)完成,仅供参考非卖品
2007.04.03
NUAA 李荣辉
李 荣
辉数字签名人 李 荣辉DN :cn=李 荣辉,c=<无
>,o=NUAA ,ou=NUAA ,
email=ROnei@126.
com 原因:我是该文档的作
者
日期:2007.04.03
21:28:51 +08'00'
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
R O n e i (李荣辉)完成,仅供参考非卖品
《现代控制理论》刘豹著(第3版)课后习题答案
《现代控制理论》刘豹著(第3版)课后习题答案 《现代控制理论》刘豹著(第3版)课后习题答案第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 解:系统的模拟结构图如下: 系统的状态方程如下: 令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。 解:由图,令,输出量有电路原理可知: 既得写成矢量矩阵形式为: 1-3 参考例子1-3. 1-4 两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。 解:令,则有相应的模拟结构图如下: 1-6 已知系统传递函数,试求出系统的约旦标准型的实现,
并画出相应的模拟结构图解: 1-7 给定下列状态空间表达式‘画出其模拟结构图求系统的传递函数解: 1-8 求下列矩阵的特征矢量解:A的特征方程解之得: 当时,解得: 令得当时,解得: 令得当时,解得: 令得1-9将下列状态空间表达式化成约旦标准型解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10 已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:串联联结并联联结1-11 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解: 1-11 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解: 1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为解法1: 解法2: 求T,使得得所以所以,状态空间表达式为
现代控制理论第3版刘豹课后习题答案完整免费
《现代控制理论参考答案》第三版 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下:
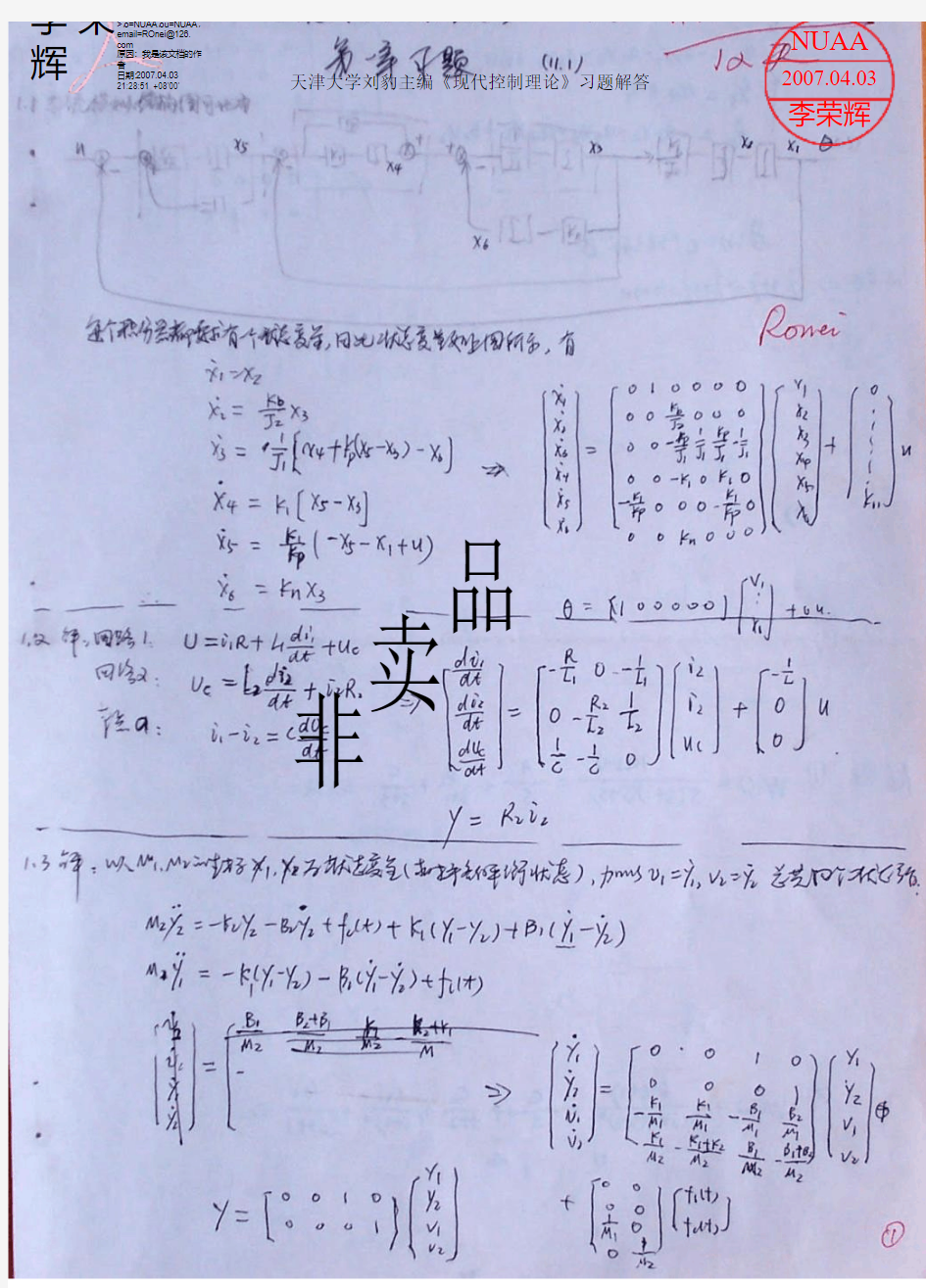
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 461 514131 3322211 +-- =+-==++- - == =?? ? ?? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ?? ??????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 000000010010000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 U 图1-28 电路图
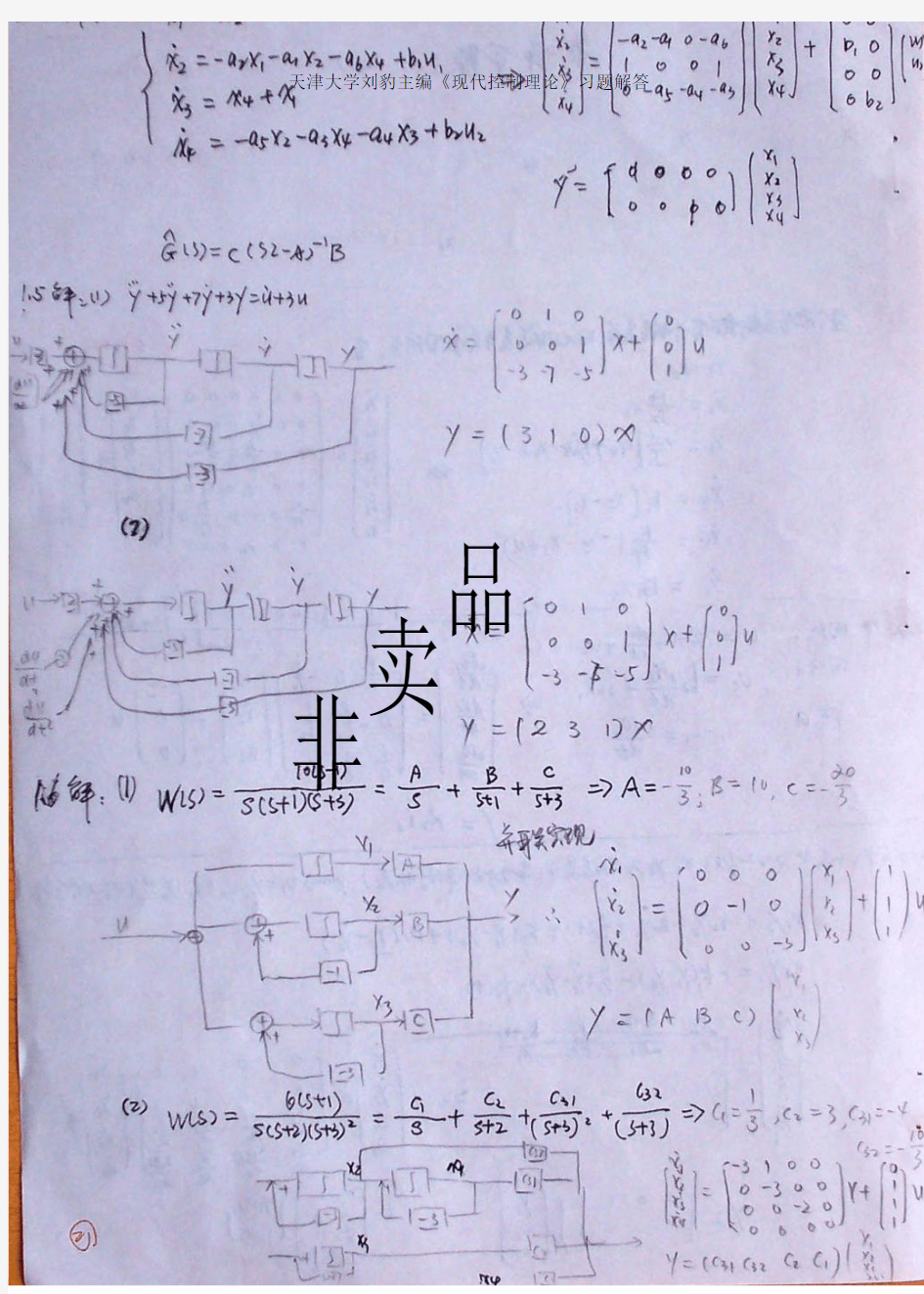
解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为: []???? ? ?????=?? ?? ? ? ????????+?????????????????? ? ?? ???????--- -=??????????????3212 13212 22 111 321000*********x x x R y u L x x x C C L L R L L R x x x 。。 。 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 1 u 2 u 图1-30双输入--双输出系统模拟结构图 解:系统的状态空间表达式如下所示: []??? ? ? ???????=????? ???????+????????????????????????------=????????????432121432134 5 61 243 210101000000 100100010x x x x y u b b x x x x a a a a a a x x x x &&&&
《现代控制理论》(刘豹_唐万生)
第1章 控制系统的状态空间表达式 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ??? 令θ(s)=y ,则y =x 1 所以,系统的状态空间表达式及输出方程表达式为
[ x 1?x 2?x 3?x 4?x 5?x 6?] =[ 010000 00K b J 200000?K p J 1?K n J 11J K p J 100100000?K 100K 1?K 1p ?K 1p ] [ x 1 x 2x 3 x 4x 5x 6] +[ 000 00K 1K p ] u y =[10 00 00][ x 1x 2x 3 x 4x 5x 6] 1-2 有电路如图1-28所示。以电压u(t)为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R 2上的电压作为输出量的输出方程。 L1 L2 U 图1-28 电路图 解:由图,令i 1=x 1,i 2=x 2,u c =x 3,输出量y =R 2x 2 有电路原理可知:R 1x 1+L 1x 1? +x 3=u L 2x ? 2+R 2x 2=x 3 x 1=x 2+ Cx 3? 既得 x 1? =?R 1L 1 x 1?1 L 1 x 3+1L 1 u
现代控制理论刘豹第三版印刷勘误表
1、 第29页 式1.34中最后一个1n β- 改为1β。 2、 36页 分为:“(1)A 阵的特征值无重根;(2)A 阵的特征值有重根;”这样的分法不是 很严密,建议应该为:“(1)A 有n 个线性无关的特征向量;(2)线性无关的特征向量数少于n ” 3、 48页上面W(s)中的第三行=号左面的“1 11()SI A B --”应移到上一行最末尾。避免误解。 4、 67页2.24式应改为:11 1221111 (1)!011 (2)!2(1)(2)312! 2!1211 1!1!2111121()00 01()000(1)()001()012()1n n t t n t t n n n n t t n t n t n n t n e t t n e t e t e t e λλλλλααλαλαλλαλλλ-------------??????????-???? ?????? ?=??????????????????? ? ????? ??? ???? ??????? 5、 70页2.32式最后 1t A -改为1 A t - 6、 97页第一行121 1 1 001 012T λλλ????=?????? 7、 100页 例3-8 2 244120100142100A B ????????=???????????? 应该改为 2 2440101001100042A B ????=???????????????? 或者改为 2121010103120110A B ???????????? ??=?? ???? 8、 103页图3.7中 12,y y 的输出箭头不应该指向211,m c c ,应断开。 9、 126页 例3-12中224()168121216M b Ab A b ?? ??=?? ???? 10、 130页用对偶原理证明,有待考证。表述不明确。另外最后倒数第二行能控标准I 行,应该改为能观标准I 型。 11、 144页式(3.124)0 lim ()s D W s →= 改为lim ()s D W s →∞ = 12、 145页式(3.133)下一行,“m 为输入矢量维数。”改为“m 为输出矢量维数。” 13、 165页4.18式下面,“其中 ,(1,2,,)i i n λ= 为对称矩阵p 的互异特征值,且均为 实数。”这句话表述不正确。,(1,2,,)i i n λ= 未必是P 的互异特征值,还有可能是有n
《现代控制理论(第三版)》答案刘豹-唐万生编
第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 阿 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ?? ??????????? ?----- =????????????????????????????? ?65432116543211111111 2654321000001000000 00000001001000000 0000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+--=??? 写成矢量矩阵形式为: []???? ? ?????=?? ?? ? ? ????????+?????????????????? ? ?? ???????--- -=??????????????3212 13212 22 111 321000*********x x x R y u L x x x C C L L R L L R x x x 。。 。 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30
《现代控制理论》第3版(刘豹_唐万生)课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为
[]????? ? ???? ????????? ?=??????? ?????????????? ?+?????? ?????????????????????????? ????????????? ?----- =????????????????????????????? ?65432116543211111111 2654321000001000000 0000 0001001000000 000001 0x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+--=?? ? 写成矢量矩阵形式为:
现代控制理论刘豹著第3版课后习题答案最完整版
第一章习题答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 461 514131 3322211 +-- =+-==++- - == =?? ? ?? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为
[]????? ? ???? ??????????=??????? ?????????????? ?+?????? ?????????????????????????? ????????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 0000000100 10000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为:
《现代控制理论(第3版)》刘豹(教学大纲)
现代控制理论 一、课程说明 课程编号: 课程名称:?现代控制理论? 英文名称:Modern Control Theory 总学时:48 总学分:3 适用对象: 自动化专业 先修课程:自动控制原理线性代数 二、课程开设的背景与目标 课程开设的背景 “现代控制理论”是自动化专业的专业基础课。课程设在第六学期,它和第五学期开设的“自动控制原理”一并构成自动化专业的核心理论基础。作为教学对象的三年级下学期本科生已经修完了所有相关的数学课程,具有了较为完善的数学基础知识,并在修完了第五学期开设的“自动控制原理”课后,对自动控制的原理、概念和方法有了一定的了解。 本课程开设目标 自动控制领域的科学研究方法,已经由最早的经典控制中以输入输出模型为主,发展为现今的现代控制中以状态空间模型为主。因而,“现代控制理论”是从事自动化专业必备的知识。 “现代控制理论”的教学目标是使学生牢固树立线性系统中状态空间的概念、进一步理解系统稳定性这一控制学科最为重要的概念,掌握能控与能观、状态反馈与状态估计等核心方法。 三、教学内容与安排 第一章前言(2学时) 主要介绍控制理论的产生背景及现代控制理论研究的主要内容,使学生对现代控制理论的发展及其所研究的主要问题有一个初步了解。 第二章控制系统的状态空间表达式(6学时) 状态空间描述是现代控制理论中描述系统动态运动过程的基本方法,是学习现代控制系统的起点。 本章的重点是状态、状态空间表达式的基本概念、状态空间表达式建立的基本方法。第三章控制系统状态空间表达式的解(8学时) 本章重点介绍线性定常系统状态方程的解;状态转移矩阵的概念、特点、性质。要求学生了解离散时间系统状态方程的求解方法。 实验一: 第四章线性系统的能控性和能观性(10学时) 本章主要介绍系统状态的可控性、可观性,它们是系统的重要特性。学生应掌握系统可控性、可观性的基本概念、判据及系统的对偶性原理,了解按照可控性、可观性对系统进