基于摄像头循迹智能车的图像二值化方法

文章编号:1〇〇9-2552(2016)07 -0161 -03 D O I:10.13274/https://www.360docs.net/doc/d916651255.html,ki.hdzj.2016. 07.042
基于摄像头循迹智能车的图像二值化方法
朱琳琳\陈哲2,曾宇3
(1.文华学院信息科学与技术学部,武汉430074;
2.湖北航天技术研究院总体设计所,武汉430040;
3.湖北工业大学理学院,武汉430068)
摘要:系统以飞思卡尔智能汽车竞赛为背景,详细阐述C C D摄像头二值化图像采集的方法。
根据C C D摄像头信号与赛道路径的特点,介绍了采用电压比较电路对C C D摄像头模拟信号进行 二值化处理的方法,有效减少单片机采集图像与图像二值化处理的时间,并提高了路径识别的 分辨率。
关键词:图像;二值化;比较器;M C9S12X S128M A A单片机;摄像头
中图分类号:TP391.41 文献标识码:A
Image binarization method for camera tracking of the intelligent car
ZHU Lin-lin1,CHEN Zhe2,ZENG Yu3
(1.Department of Information Science and Technology,Wenhua University,Wuhan430074, China;
2.Design I n s t i t u t e of Hubei Space Technology Academy,Wuhan430040, China;
3.School of Science,Hubei University of Technology,Wuhan430068, China)
Abstract:This system taking freescale cup intelligent car racing as the background,elaborated the C C D camera binarization image acquisition method.According t o the characteristics of the C C D camera signal and the track,the voltage comparison circuit i s introduced in the C C D camera analog signal binarization processing method,which effectively reduces the time of image collecting and image binarization processing,and improves the resolution of path identification.
Key words:image;binaryzation;comparator;M C9S12X S128M A A S C M;camera
2016年第7 48 y信息疼产
0引言
目前汽车厂商越来越重视无人驾驶技术的研
发,而飞思卡尔智能汽车竞赛中的智能车就是这样
一种具有自动驾驶功能的微缩模型。飞思卡尔智能
汽车竞赛的摄像头组采用单片机采集C C D摄像头
图像数据,完成赛道路径的识别。采用A/D转换器
对C C D摄像头模拟信号进行采样,存在路径识别分 辨率低,且需要软件对摄像头数据逐一进行数值比 较,完成二值化图像数据处理,消耗大量的单片机计 算资源。因此,本设计使用电压比较电路对C C D摄 像头模拟信号进行二值化处理的方案,并利用单片 机捕获输入通道完成二值化图像数据的采集。
1整体方案设计
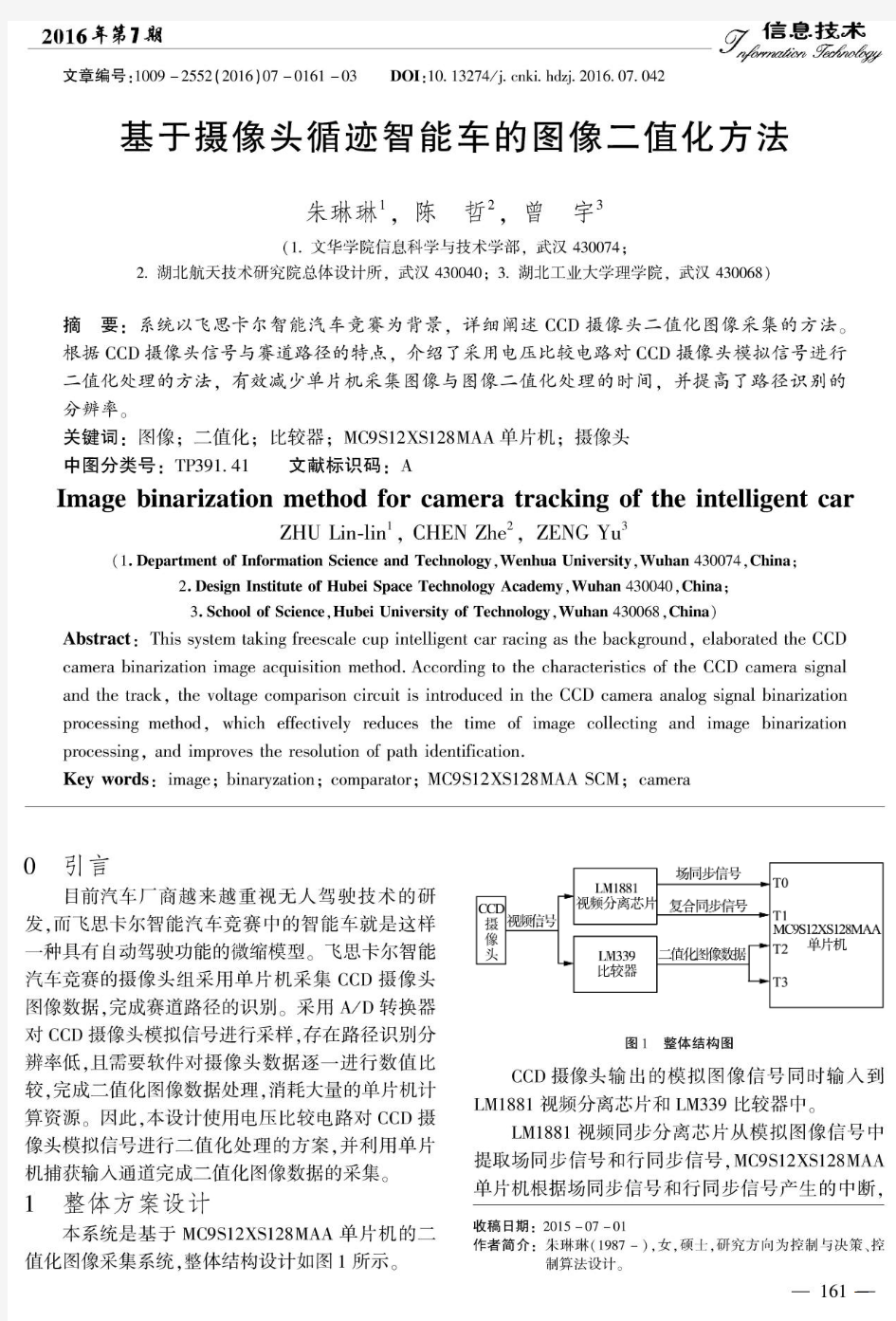
本系统是基于M C9S12X S128M A A单片机的二 值化图像采集系统,整体结构设计如图1所示。
图1整体结构图
C C D摄像头输出的模拟图像信号同时输入到 L M1881视频分离芯片和L M339比较器中。
L M1881视频同步分离芯片从模拟图像信号中 提取场同步信号和行同步信号,M C9S12X S128M A A 单片机根据场同步信号和行同步信号产生的中断,收稿日期:2015-07 -01
作者简介:朱琳琳(1987-),女,硕士,研究方向为控制与决策、控制算法设计。
一 161
—
基于摄像头的自主循迹小车系统设计
基于摄像头的自主循迹小车系统设计
摘要 “飞思卡尔杯”全国大学生智能汽车邀请赛属教育部主办的全国五大竞赛之一,其专业知识涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等诸多学科。根据大赛的技术要求,设计制作了智能车控制系统。在整个智能车控制系统中,如何准确地识别道路及实时地对智能车的速度和方向进行控制是整个控制系统的关键。 本文首先对智能车的硬件进行设计,达到了低重心、大前瞻、高稳定性的目标。其次对系统的软件部分进行设计,利用动态阈值法分割处理采集到的图像,得到赛道信息,从而得到智能车的偏航角和偏航距离。综合偏航角和偏航距离两个控制量对舵机进行控制,实现了入弯走内道,S弯直线冲过的目标,大大提高了智能车的弯道运行速度。用光电编码盘检测智能车的运行速度,再根据赛道信息给定智能车的运行速度,运用增量式PID算法调节驱动电机转速,实现了电机的快速响应。 整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。经过大量测试,最终确定了现有的系统结构和各项控制参数。 关键字:智能车;图像传感器;阈值分割;路径识别;
Abstract Freescale Cup National Undergraduate Smart Car Competition is sponsored by the National Ministry of Education, one of the five contests, their professional knowledge related to control, pattern recognition, sensor technology, automotive electronics, electrical, computer, machinery and many other disciplines. According to the technical requirements of the contest, we design the intelligent vehicle control system. In the entire control system of the smart car, how to accurately identify the road and real-time control the speed and direction of the Smart Car is the key to the whole control system. This paper first introduces the hardware of the smart car, to achieve a low center of gravity, forward-looking, and high-stability target. The second part of the system is software design, the use of dynamic threshold segmentation algorithm to process images, get track information, yaw and the yaw angle. The steering gear is controlled by the yaw and the yaw angle, when through the turn, the smart car goes inside the road, and when through S bend, the smart car crossed as a goal line, greatly improving speed of the smart car. From the detection with encoder disk we get the speed of the smart car, and then from the track information, we set the expected speed of the smart car, the use of incremental PID algorithm for adjusting drive motor speed to achieve the rapid response to the motor. The entire system is involved in mechanical models of structural adjustment, the sensor circuit design and signal processing, control algorithms and strategies for optimizing many aspects, such as. After extensive testing, and ultimately determine the structure of the system and various control parameters. Keywords:smart car; image sensor; threshold segmentation; road identification
基于数电自动循迹智能小车
设计题目:基于数电的循迹小车 2014年09月10日
目录 目录....................................................................................................3.. 摘要 (4) 1. 设计任务与要求 (5) 1.1 基本功能 (5) 2.系统设计方案 (5) 2.1小车循迹原理…………………………………………………………………………5. 2.2控制系统总体设计 (6) 3.系统方案 (6) 3.1循迹传感器模块………………………………………………………………………6. 3.1.1红外传感器的简介………………………………………………………………7.. 3.1.2比较器LM324简介 (7) 3.1. 3具体电路 (8) 3.1.4传感器的安装 (8) 3.2控制器模块 (9) 3.2.1稳压芯片的工作原理 (9) 3.2.2继电器的工作原理 (9) 3.3电机与驱动模块 (10) 3.4自动循迹小车的总体设计 (11) 4.设计体会 (11) 5.参考资料 (12)
基于数电的循迹小车 内容摘要:本着从简到繁的原则,我们制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。 关键词:循迹小车,传感器,电机驱动 1.设计任务与要求 1.1 基本功能 ①设计一个基于直流电机的自动循迹小车,使小车能够自动检测地面黑色轨迹,并沿着黑色轨迹行驶。 ②当小车走在白色轨道时,保持原来速度行驶;当遇到黑线时,说明小车跑偏,通过继电器将开关打到低电压一路,使小车差速行驶,并
智能循迹小车程序
#include
电磁循迹
基 于 电 磁 感 应 的 循 迹 小 车 的 设 计作者:陈
一、硬件设计 1、传感器模块由10mh的电感与电容并联组成谐振电路用于检测轨道中的 电线产生的交变磁场。由于传感器转换得到的电信号为交流信号且较为 微弱,难以被AD模块采集利用,所以需经过检波运放电路处理后输入AD 模块再给单片机。因为其信号频率为20kHz,因此可以采取包络检波将其 峰值转换为直流信号,再经过LM358运算放大器进行电压放大(采用电 压反馈放大)。 2、此次单片机选用51单片机,型号为stc89c52,其操作简单,价格低廉, 性能也足以满足设计所需,但由于其片内资源有限,无自带AD模块,所 以外加一个16位4路AD模块ADS1115。 3、电机驱动模块采用常见的LM298N用于驱动直流电机,并且给其12V供电 可引出5v给单片机供电,解决电源问题。 检波放大电路图如下:
单片机与AD 模块连接图如下: 二、 软件设计 是 即A1-A2<设定值 调试测得 否 是 否 是 开始 IIC 协议读取左右两 路AD 数字量A1、A2 直行命令 A1==A2 A1>A2 A1 ..\参考资料\ADS1115中文资料.pdf 主要通过IIC时序读取返回值,需要配置三个寄存器, 详见参考资料。 三、调试 数码管显示返回数值,在跑道上纪录直道,左右转各自的数值范围,用于程序调试最终适应相关跑道。(因完成的比较仓促,并未运用PID算法,在低速下足以循迹) 四、附录 电路仿真图: 实物图: 参考程序: # include <> # include <> #define uchar unsigned char #define uint unsigned int sbit pwm_r = P2^0; sbit pwm_l = P2^1; sbit SDA = P1^0; sbit SCL = P1^1; sbit DU = P2^6; 关显示 0x6F, 0x77, 0x7C, 0x39, 0x5E, 0x79, 0x71, 0x40, 0x80, 0x00 }; /*==================================== 数码管位选码 ====================================*/ //第1位2位 3位 4位 5位 6位 7位8位 uchar code T_COM[] = {0xfe, 0xfd, 0xfb, 0xf7, 0xef, 0xdf, 0xbf, 0x7f};//数码管位 分类号编号 烟台大学 毕业论文(设计)基于STM32的智能小车 摄像头循迹系统 Intelligent Car Tracking System Based on STM 32 Camera 申请学位:工学学士 院系:光电信息科学技术学院 专业:电子信息工程 姓名:王坤 学号:200813503229 指导老师:尚明(教授) 2012年5 月21 日 大学EDA实验室 基于STM32的智能小车摄像头循迹系统 姓名:王坤 导师:尚明(教授) 2012年5 月21 日 大学EDA实验室 大学毕业论文(设计)任务书 院(系):光电信息科学技术学院 [摘要]现在人们越来越喜欢安全、节能、环保、智能化和信息化的汽车了,在智能汽车新时代,无人驾驶技术,得到了飞越的发展,成为了智能车时代的新标志。智能小车不但逐步提高了车辆的控制水平和驾驶水平,而且也保障了车辆行驶的安全、畅通、高效特性。本文主要讨论了智能车系统的设计方案,并且对智能车自主行驶的决策以及控制,算法也进行了相应的研究。 本论文首先设计了智能车的硬件结构,硬件方面以Cortex-m3为控制核心,另外其他辅助模块包括:电源模块,图像传感模块,速度控制模块以及其他功能模块进行辅助,从而来完成智能车的硬件设计。由于智能车有一个比较复杂跑道,传统的控制算法在复杂跑道情况下已经无法解决智能车的控制参数的问题。因此本论文做了一些改进,本论文采用理论结合实际,我们采用了模糊PID控制算法来实现对智能车的控制,并进行了一定的实验。 在该系统中,由CMOS摄像头来实现路径识别,通过对小车的闭环控制,使小车能按照给定的黑色引导线平稳地循迹。该系统能够很好地满足智能车对路径识别性能和抗干扰能力的要求,稳定误差小,调节相应时间比较快,具有较好的动态性能和良好的稳定性。 实验证明,所设计的智能车具有速度快,适应性强的特点。 [关键词]智能车;图像处理;比例积分微分 智能汽车自主驾驶 控制系统 智能汽车自主驾驶控制系统 文献综述 姓名:杨久州班级:机电一班学号: 7631 前言 20 世纪末以来,随着世界智能交通系统(ITS)和无人化武器装备系统的发展,共同对新一代智能交通工具提出了迫切的需求。智能车辆技术迅速成为具有前瞻性的高新技术研究课题,受到了学术界和企业界的广泛关注。当前,智能交通系统(ITS)作为一个能够较好地解决世界性的交通拥堵、大量的燃油消耗和污染问题的先进体系吸引了大量学者的关注。一般来说,ITS 由智能车辆、运营车辆管理系统、旅行信息系统和交通监控系统组成,智能车辆作为其核心部分,扮演着至关重要的角色。没有高度发达的智能车辆技术,就不能实现真正意义上的智能交通系统。 智能车辆(Intelligent Automotive),又称自主车辆(Autonomous Vehicle)或无人地面车辆(UGV),集成了车辆技术、传感技术、人工智能、自动控制技术、机电一体化和计算机技术等多学科强交叉科学技术,它的发展水平反映了一个国家的工业实力。在近十年间,智能车辆技术的研究吸引了世界范围内大量高校、企业以及相关科学家的关注,各国政府和军事部门也对其表现出强烈的兴趣,智能车辆技术因此在短期内得到了飞跃性的 发展。 1.智能汽车自主驾驶技术的发展现状 汽车自主驾驶技术研究是从两个不同研究领域发展起来的。 从1%0年开始,为了改进汽车的操控性能,美国ohio大学的一些研究工作者开始进行汽车侧向跟踪控制和纵向跟踪控制研究,该项研究持续了二十多年,取得了一系列研究成果。 另一方面,二十世纪六十年代美国stanfoul研究所在进行人工智能研究中,开发了Shakey移动机器人,作为人工智能研究工作的试验平台。1973一1981年间由Hans.Moravec在Stanford研究所领导的stanford。art工程则第一次实现了自主驾驶。 进入二十世纪八十年代以后,军方和一些大型汽车公司对自主驾驶技术表现出了浓厚的兴趣。美国军方先后组织了多项车辆自主驾驶的研究项目,其中包括DARPA的ALV项目,DARPA的DEMo一H计划、DEMo一111计划等。这一系列的研究都试图将自主驾驶技术应用到军事上去,以提高部队战斗力。其它包括英国、法国、德国等在内的一些国家 也都在进行自主驾驶技术在军事应用领域的相关研究。大型汽车公司则更加注重汽车自主 驾驶研究,以期提高汽车性能。 龙源期刊网 https://www.360docs.net/doc/d916651255.html, 智能电磁循迹小车的硬件设计与实现 作者:陈文仙庞荣 来源:《商情》2011年第29期 【摘要】本智能车依据交流信号能够产生磁场(电磁感应)的原理,采用LC 谐振回路感应电磁信号寻迹方案,同时配合光电编码盘、电机、舵机、电池以及相关驱动电路来进行信息的处理,以达到路径识别的目的,并通过PID 方式对电机和舵机进行相关调节,最终以闭合回路的形式控制模型车高速稳定地在跑道上行驶。 【关键词】电磁感应 PID 路径识别闭环控制 1引言 本文以第六届全国大学生智能汽车竞赛为背景,为了保证智能汽车能够具有迅捷的速度、远而清晰的前瞻以及较高的灵敏度与稳定性,从硬件方面对系统进行了优化。 2智能汽车控制系统总体设计 2.1总体设计思路。依据电磁感应的原理我们用LC 谐振回路为传感器来采集信号,之后 用运放对采集到的信号进行放大,最终将此信号送给单片机进行处理。在控制策略方面,主要包括转向控制和速度控制。对于舵机的转向控制,我们采取经典的位置式PD 算法。对于电机的速度控制策略,采用PID 调节的同时引入反转制动刹车电路。各个方面的之间的联系如图所示。 2.2系统硬件结构。此智能车采用谐振回路定位系统来跟踪前方的赛道,通过谐振回路将检测到了信号进行放大,送给外部A/D 进行数据的处理,最后送给MC9S12XS128 进行相应的运算,然后将计算得到的数据送给舵机和电机,对其进行相应的控制。其中所用的硬件结构包括:电源模块、MC9S12XS128 系统、传感器模块、电机驱动模块、无线模块。 3智能汽车机械系统调整与改造 在对智能车几个月来的研究,我们发现在规则允许范围内,适当优化机械结构可以带来事半功倍的效果。 根据长期的调试,我们发现对于前轮倾角、悬挂、后轮的差速做调整会使车行驶时有更好的效果。 工业职业技术学院 毕业设计 课题名称基于51与单片机的智能小车控制系统 系(院)名称电气工程系 专业及班级 学生 学号 指导教师 完成日期年11 月19 日 摘要 随着我国科学技术的进步,智能化作为现代社会的新产物开始越来越普及,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。智能小车是一个多种高薪技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,可以涉及到当今许多前沿领域的技术。 整个小车平台主要以51单片机为控制核心,通过无线遥控实现前进后退和转向行驶,通过红外线传感器,实现小车的自适应巡航、避障等功能。设计采用对比选择,模块独立,综合处理的研究方法。通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。从电机车体,最小系统到无线遥控,红外线对管的自动寻迹再到红外线自动避障和语音控制,完成各模块设计。通过调试检测各模块,得到正确的信号输出,实现其应有的功能。最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模块有效整合在一起,达到所预期的目标,完成最终设计与制作,能使小车在一定的环境中智能化运转。 关键字:智能小车,单片机,红外传感器。 目录 第一章绪论.............................................................................................................................- 1 - 1.1.1智能循迹小车概述........................................................................................................- 1 - 1.1.2课题研究的目的和意义 ...............................................................................................- 2 - 1.1.3智能循迹小车智能循迹分类.......................................................................................- 3 - 1.1.4智能循迹小车的应用....................................................................................................- 3 - 第二章方案设计 ..........................................................................................................................- 5 - 2.1 主控系统.........................................................................................................................- 5 - 2.2单片机最小系统 ...............................................................................................................- 6 - 2.2.1 STC89C52简介...................................................................................................- 6 - 2.2.2 时钟电路...............................................................................................................- 8 - 2.2.3复位及复位电路....................................................................................................- 8 - 2.3 电机驱动模块................................................................................................................ - 10 - 2.4 循迹及避障模块............................................................................................................ - 11 - 2.5 机械系统......................................................................................................................... - 11 - 2.6电源模块......................................................................................................................... - 11 - 第三章硬件设计 ..................................................................................................................... - 12 - 3.1总体设计......................................................................................................................... - 12 - 3.1.1主板设计框图..................................................................................................... - 12 - 主板设计框图如图3-1,所需原件清单如表3-1 .................................................. - 12 - 智能循迹小车总体设计方案 1.1 整体设计方案 本系统采用简单明了的设计方案。通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块黑线路经,然后由AT89S52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现小车循迹。 1.2系统设计步骤 (1)根据设计要求,确定控制方案; (2)将各个模块进行组装并进行简单调试; (3)画出程序流程图,使用C语言进行编程; (4)将程序烧录到单片机内; (5)进行调试以实现控制功能。 1.2.1系统基本组成 智能循迹小车主要由AT89S52单片机电路、循迹模块、L298N驱动模块、直流电机、小车底板、电源模块等组成。 (1)单片机电路:采用AT89S52芯片作为控制单元。AT89S52单片机具有低成本、高性能、抗干扰能力强、超低功耗、低电磁干扰,并且与传统的8051单片机程序兼容,无需改变硬件,支持在系统编程技术。使用ISP可不用编程器直接在PCB板上烧录程序,修改、调速都方便。 (2)循迹模块:采用脉冲调制反射红外发射接收器作为循迹传感器,调制信号带有交流分量,可减少外界的大量干扰。信号采集部分就相 当于智能循迹小车的眼睛,有它完成黑线识别并产生高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动循迹。 (3)L298N驱动模块:采用L298N作为点击驱动芯片。L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一片L298N可以分别控制两个直流电机,并且带有控制使能端。该电机驱动芯片驱动能力强、操作方便、稳定性好,性能优良。L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。 extern int left,w,top,h; extern HDC m_hdc; CBrush brush3(RGB(0,255,0)); CBrush brush4(RGB(255,0,0)); CBrush brush5(RGB(255,255,0)); #else #include 智能小车控制系统设计 ——ARM控制模块设计 EasyARM615是一款基于32位ARM处理器,集学习和研发于一体的入门级开发套件,该套件采用Luminary Micro(流明诺瑞)公司生产的Stellaris系列微控制器LM3S615。本系统设计是以EasyARM615开发板为核心,通过灰度传感器检测路面上的黑线,运用PWM直流电机调速技术,完成对小车运动轨迹等一系列的控制。同时利用外扩的液晶显示器显示出各个参数。以达到一个简易的智能小车。 本文叙述了系统的设计原理及方法,讨论了ISR集成开发环境的使用,系统调试过程中出现的问题及解决方法。 据观察,普通的玩具小车一般需要在外加条件下才能按照自己的的设想轨迹去行驶,而目前可借助嵌入式技术让小车无需外加条件便可完成智能化。在小车行驶之前所需作的准备工作是在地面上布好黑线轨迹,设计好的小车便可按此黑线行驶,即为智能小车。其设计流程如下: 1、电机模块 采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成,H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控制脉冲的占空比,精确调整电机转速。这种电路由于管子工作只在饱和和截止状态下,效率非常没。H型电路使实现转速和方向的控制简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调整技术。 具体电路如下图所示。本电路采用的是基于PWM原理的H型驱动电路。该电路采用TIP132大功率达林顿管,以保证电动机启动瞬间的8安培电流要求。 2、传感器模块 灰度测量模块,是一种能够区分出不同颜色的的电子部件。灰度测量模块是专为机器人设计的灰度传感器。例如:沿着黑色轨迹线行走,不偏离黑色轨迹线;沿着桌面边沿行走,不掉到地上,等等。足球比赛时,识别场地中灰度不同的地面,以便于进行定位。不同的物体对红外线的反射率不同,黑色最低,白色最高;它通过发射红外线并测量红外线被反射的强度来输出反映物体颜色的电压信号,有效距离3-30毫米。 其技术规格如下: 已知灰度传感器的输出电压为0-3.3V,所以可通过ARM615开发板上的ADC 模块转换成数字信号,最后通过不断测试得出黑线与白线的大概参数值,完成对小车传感器部分的设计。 在本次设计中选择二个灰度传感器,其实现效果与布局如下所示。 智能循迹小车总体设计方案 整体设计方案 本系统采用简单明了的设计方案。通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块黑线路经,然后由AT89S52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现小车循迹。 系统设计步骤 (1)根据设计要求,确定控制方案; (2)将各个模块进行组装并进行简单调试; (3)画出程序流程图,使用C语言进行编程; (4)将程序烧录到单片机内; (5)进行调试以实现控制功能。 系统基本组成 智能循迹小车主要由AT89S52单片机电路、循迹模块、L298N驱动模块、直流电机、小车底板、电源模块等组成。 (1)单片机电路:采用AT89S52芯片作为控制单元。AT89S52单片机具有低成本、高性能、抗干扰能力强、超低功耗、低电磁干扰,并且与传统的8051单片机程序兼容,无需改变硬件,支持在系统编程技术。使用ISP可不用编程器直接在PCB板上烧录程序,修改、调速都 方便。 (2)循迹模块:采用脉冲调制反射红外发射接收器作为循迹传感器,调制信号带有交流分量,可减少外界的大量干扰。信号采集部分就相当于智能循迹小车的眼睛,有它完成黑线识别并产生高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动循迹。 (3)L298N驱动模块:采用L298N作为点击驱动芯片。L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一片L298N可以分别控制两个直流电机,并且带有控制使能端。该电机驱动芯片驱动能力强、操作方便、稳定性好,性能优良。L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。 //T0产生双路PWM信号,L298N为直流电机调速,接L298N时相应的管脚上最好接上10K 的上拉电阻。 /* 晶振采用12M,产生的PWM的频率约为100Hz */ #include 第八届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:北京邮电大学 队伍名称:北邮摄像头一队 参赛队员:何映材 邬仲钧 刘涛 带队教师:高荔 技术报告和研究论文使用授权的说明 本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名:何映材 邬仲钧 刘涛 带队教师签名: 日期: 目录 第一章设计概览 (4) 1 设计概述 (4) 1.1 整车设计思路 (4) 1.2 车模整体造型 (4) 图1.2车模整体造型 (5) 第二章硬件设计 (6) 2 硬件设计 (6) 2.1 机械结构 (6) 2.1.1舵机改装 (6) 2.1.2电池固定 (6) 2.1.3电机定位 (7) 2.1.4底盘固定 (7) 2.1.5差速调节 (7) 2.2 硬件电路 (7) 2.2.1电源设计 (7) 2.2.2电池电压检测模块 (8) 2.2.3驱动电路设计 (9) 2.3 摄像头选型 (9) 第三章系统软件设计 (10) 3 软件设计 (10) 3.1 程序整体设计 (10) 3.2 图像提取与处理 (11) 3.3 控制策略 (13) 3.3.1整体控制 (13) 3.3.2PID算法的引入与改进 (13) 3.3.3增量式or位置式 (15) 第四章调试工具 (16) 4 调试工具 (16) 第五章总结 (17) 5 总结 (17) 第六章车模参数 (18) 6 车模规格 (18) 参考文献 (18) 附录 (19) 智能车速度控制系统的设计与实现 引言 在智能车竞赛中,速度控制不能采用单纯的PID,而要采用能够在全加速、紧急制动和闭环控制等多种模式中平稳切换的“多模式”速度控制算法,才能根据不同的道路状况迅速准确地改变车速,实现稳定过弯。 系统硬件设计 按照竞赛要求,本文设计的智能车速度控制系统,以飞思卡尔 MC9S12DG128 单片机为核心[1],与车速检测模块、直流电机驱动模块、电源模块等一起构成了智能车速度闭环控制系统。单片机根据赛道信息采用合理的控制算法实现对车速的控制,车速检测采用安装于车模后轴上的光电编码器,直流电机驱动采用了由四个MOS管构成的H桥电路如图1所示,电源模块给单片机、光电编码器和驱动电机等供电。 系统建模 一个针对实际对象的控制系统设计,首先要做的就是对执行器及系统进行建模,并标定系统的输入和输出。为了对车速控制系统设计合适的控制器,就要对速度系统进行定阶和归一化[2]。对此,分别设计了加速和减速模型测定实验。通过加装在车模后轮轴上的光电编码器测量电机转速。编码器齿轮与驱动轮的齿数比为33/76,编码器每输出一个脉冲对应智能车运动1.205mm。车模可以通过调节加给电机的PWM波的占空比进行调速。单片机上的PWM模块可以是8位或16位的,为了提高调速的精度,电机调速模块选用16位PWM,其占空比调节范围从0到65535,对应电机电枢电压从0%到100%的电池电压。 将车模放置在一段长直跑道上,采用开环方式给驱动电机加上不同的电压,记录车模在速度进入稳定后的速度值。然后将所测得的电枢电压与车速进行拟合的曲线如图2所示,由图1可将智能车加速模型近似为线性模型。 根据实验数据可以确定车速执行器系统的零点和增益。车速V与占空比PWM_Ratio的关系见公式1: V = PWM_Ratio×402 + 22000 (1) 其中:PWM_Ratio的取值范围为0-65535 车模减速有三种方法:自由减速、能耗制动和反接制动。自由减速动力来自摩擦阻力,基本认为恒定。能耗制动是将能量消耗到电机内阻上,制动力随着车速的降低而降低,也可通过控制使加速度减小得更快。反接制动通过反加电压实现,制动力与所加的反向电压有关。 智能循迹/避障小车研究 工作报告 一、智能循迹小车程序结构框图 二、Proteus仿真图 三、软件程序设计 一、智能循迹小车程序结构框图 经过几天在网上的查找,对智能循迹/避障小车有了大致的了 解, 一般有三个模块: 1、最基本的小车驱动模块,使用两个二相四线步进电机对小车的两个后轮分别进行驱动,前轮最好用万向轮,能使小车更好地转弯; 2、小车循迹模块,在小车底部有三个并排安装的红外对管,对黑色与白色的反射信号不同,经单片机处理后对小车进行相应处理; 3、避障模块,我写的程序中对于避障模块是用中断来处理的(即安装在小车车头的红外对管检测到有障碍物后,就会向单片机的P3_2口输出一个高电平或是低电平,这时中断程序将对小车进行预先设定好的避障处理),但是在程序结构框图中,我不太会表示中断处理方式,所以就用查询的方式画了。 N Y N Y 二、Proteus 仿真图 我用Proteus 大概地仿真了小车的运行状态。图中的两个二相四线步进电机就代表小车的左右轮(假定步进电机顺时针转动方向为小车前进方向),网上有很多种驱动芯片,在仿真时我只使用L298N 芯 片来驱动步进电机。用三个单刀双制开关模拟用于小车循迹的三个红外对管的输出信号,经一个与门与三极管开关连接到P3_3口,中断程序对P1_0, P1_1, P1_2三个口进行检测,并做出相应处理。同时因为避障模块的优先级高于循迹模块,所以将外部中断0用于避障,外部中断1用于循迹。P1_3口则用于检测小车是否到达终点。 1、小车驱动模块: 使用一片298芯片驱动一个二相四线步进电机,电机的电压为12V。 智能车摄像头图像畸变矫正的研究 甄红涛;齐晓慧;白勇博 【期刊名称】《信息技术》 【年(卷),期】2011(035)001 【摘要】The geometric model of smart car camera is built, and the truth of image distortion is discussed. Against the longitudinal distortion and transversal distortion, non-uniform lines collection and linear compensating are proposed, and the conversion of coordinates formula is deduced. The experiment result shows that this image rectifying method is efficient and can supply accurate image information to extract routing parameter for smart car. For the simple theory, high adaptability and ideal effect of this method, it has high-use value on engineering implementation.%建立了智能车摄像头成像的几何模型,并对图像畸变原理进行了分析,针对图像的纵向畸变和横向畸变分别提出了非均匀行采集和线性补偿的矫正方法,并推导出了坐标变换公式.实验证明,这种方法能够对摄像头图像进行有效矫正,为智能车导航路径参数的提取提供了准确的图像信息.该方法原理简单,适应性强,效果理想,在工程上具有较高的实用价值. 【总页数】4页(52-55) 【关键词】智能车;图像矫正;非均匀行采集 【作者】甄红涛;齐晓慧;白勇博 【作者单位】军械工程学院光学与电子工程系,石家庄,050003;军械工程学院光学与电子工程系,石家庄,050003;军械工程学院光学与电子工程系,石家基于STM32的智能小车摄像头循迹系统
智能汽车自主驾驶控制系统
智能电磁循迹小车的硬件设计与实现
基于某51单片机的智能小车控制系统
智能循迹小车总体设计方案
飞思卡尔智能车摄像头组freescale程序代码
智能小车控制系统设计
智能循迹小车总体设计方案
PWM调速+循迹__智能小车程序
摄像头组-北京邮电大学-北邮摄像头一队-智能车技术报告-华北赛区
智能车速度控制系统的设计与实现.
智能循迹小车设计
智能车摄像头图像畸变矫正的研究