PMC功能指令详解带例
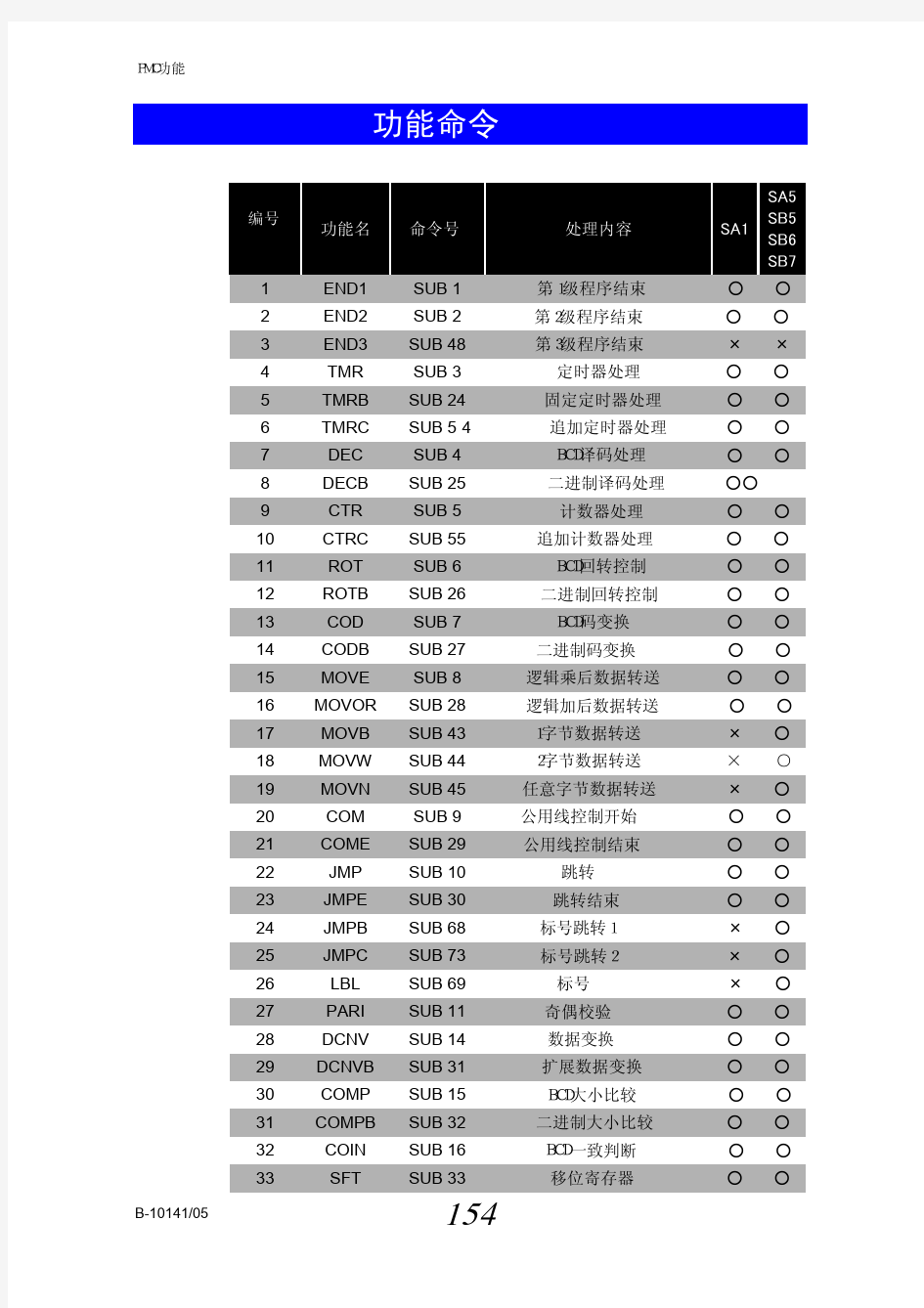
功能命令
编号 功能名命令号处理内容SA1
SA5
SB5
SB6
SB7
1END1SUB 1第1级程序结束○○
2 END2 SUB 2第2级程序结束 ○○
3END3SUB 48第3级程序结束××
4 TMR SUB 3定时器处理 ○○
5TMRB SUB 24固定定时器处理○○
6TMRC SUB54追加定时器处理 ○○
7DEC SUB 4BCD译码处理○○
8DECB SUB25二进制译码处理 ○ ○
9CTR SUB 5计数器处理○○
10 CTRC SUB 55 追加计数器处理 ○○
11ROT SUB 6BCD回转控制○○
12 ROTB SUB 26 二进制回转控制 ○○
13COD SUB 7BCD码变换○○
14 CODB SUB 27二进制码变换 ○○
15MOVE SUB 8逻辑乘后数据转送○○
16 MOVOR SUB 28 逻辑加后数据转送 ○○
17MOVB SUB 431字节数据转送×○
18 MOVW SUB 44 2字节数据转送 × ○
19MOVN SUB 45任意字节数据转送×○
20 COM SUB 9公用线控制开始 ○○
21COME SUB 29公用线控制结束○○
22 JMP SUB 10跳转 ○○
23JMPE SUB 30跳转结束○○
24 JMPB SUB 68标号跳转1
×○25JMPC SUB 73标号跳转2×○
26 LBL SUB 69标号 ×○
27PARI SUB 11奇偶校验○○
28 DCNV SUB 14数据变换 ○○
29DCNVB SUB 31扩展数据变换○○
30 COMP SUB 15BCD大小比较 ○○
31COMPB SUB 32二进制大小比较○○
32 COIN SUB 16BCD一致判断 ○○
33SFT SUB 33移位寄存器○○
B-10141/05154
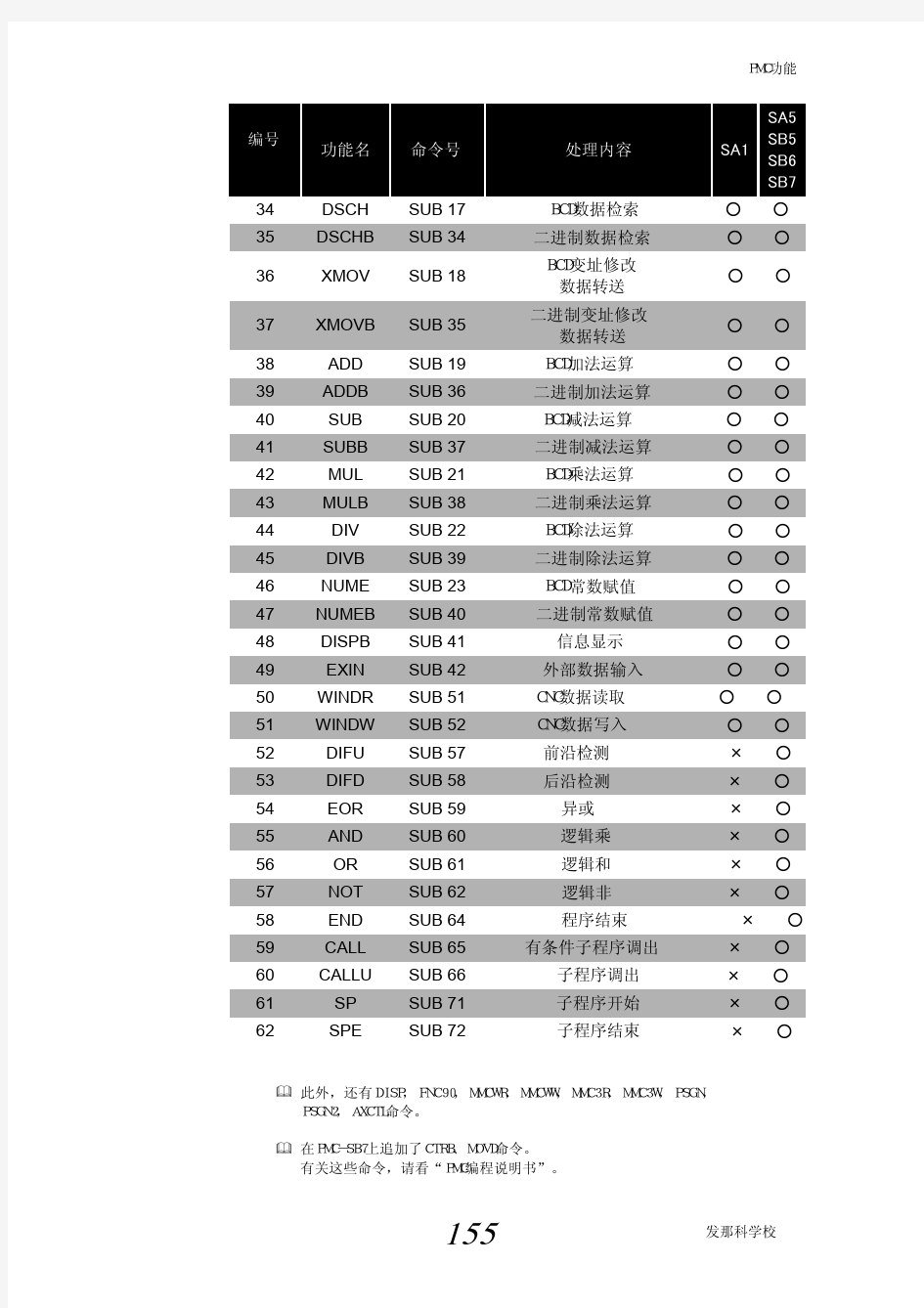
编号 功能名命令号处理内容SA1
SA5
SB5
SB6
SB7
34 DSCH SUB 17BCD数据检索 ○○35DSCHB SUB 34二进制数据检索○○
36XMOV SUB 18BCD变址修改
数据转送
○○
37XMOVB SUB 35二进制变址修改
数据转送
○○
38 ADD SUB 19 BCD加法运算 ○○39ADDB SUB 36二进制加法运算○○40 SUB SUB 20 BCD减法运算 ○○41SUBB SUB 37二进制减法运算○○42 MUL SUB 21 BCD乘法运算 ○○43MULB SUB 38二进制乘法运算○○44 DIV SUB 22 BCD除法运算 ○○45DIVB SUB 39二进制除法运算○○46 NUME SUB 23 BCD常数赋值 ○○47NUMEB SUB 40二进制常数赋值○○48 DISPB SUB 41信息显示
○○49EXIN SUB 42外部数据输入○○50 WINDR SUB 51CNC数据读取 ○○51WINDW SUB 52CNC数据写入○○52 DIFU SUB 57前沿检测 ×○53DIFD SUB 58后沿检测×○54 EOR SUB 59异或 ×○55AND SUB 60逻辑乘×○56 OR SUB 61逻辑和 ×○57NOT SUB 62逻辑非×○58 END SUB 64程序结束
×○59CALL SUB 65有条件子程序调出×○60 CALLU SUB 66子程序调出
×○61SP SUB 71子程序开始×○62 SPE SUB 72子程序结束
×○
此外,还有DISP, FNC90, MMCWR, MMCWW, MMC3R, MMC3W, PSGN,
PSGN2, AXCTL命令。
在PMC-SB7上追加了CTRB、MOVD命令。
有关这些命令,请看“PMC编程说明书”。
155 发那科学校
第1级结束第2级结束第3级结束定时器
第1级顺序结束。
第2级顺序结束。
第3级顺序结束。
可在PMC-RC系列上使用
是延时定时器。ACT=1后经过设定的时间时,输出W1即接通。
1~8号为48ms单位
(最大1572.8秒)
9号以后为8ms单位
(最大262.1秒)
定时器号
RB4,RB6/RC4为1~150
其它为1~40
ACT=0:断开时间继电器。
=1:起动定时器。
W1 =1:ATC接通后经过设定的时间时,
输出即接通。
设定时间
定时器号
·在X000.0接通后再经过4800ms,R000.0就接通。
B-10141/05156
固定定时器可变定时器
定时器设定时间是固定的
延时时间。
用功能命令的参数指定
时间。
定时器号
设定时间
ACT=0:断开时间继电器。
=1:起动定时器。
W1 =1:在ACT接通后经过设定的时间时,输出即接通。
〔设定时间〕用ms单位的10进数设定时间。(最大262136)
〔定时器号〕1~100
定时器号
设定时间
·在X000.0接通后经过5秒,R000.0即接通的定时器。
利用数据表等设定定时器时间。
定时器精度
定时器设定时间地址
定时器寄存器地址
〔定时器精度〕 0:8ms 1:48ms
〔定时器设定时间地址〕
需要2字节的存储器,并且以定时器精度为单位用二进制形式进行
设定。(定时器设定画面显示为10进数显示)
〔定时器寄存器地址〕
系统使用的作业区域需要4字节。
定时器精度
定时器设定时间地址
定时器寄存器地址
定时器时间/定时器精度
4000ms/8=500
·在X000.0接通后经过4秒,R000.0即接通的定时器。
157 发那科学校
译码处理对2位的BCD码进行译码,当与指示的值相同时,W1接通,如不一致,则W1断开。
代码信号的地址
译码指示
ACT=1:进行译码。
W1 =1:译码的结果已一致。
〔代码信号地址〕指定译码对象的地址。
〔译码指示〕
位数指示01:只对低位数进行译码。
10:只对高位数进行译码。
11:对2位数均进行译码。
值指示:指示进行译码的数值。
代码信号的地址
译码指示
·在X000.0接通时,如R0300为00000011(3)则R000.0接通。
B-10141/05158
二进制译码对1、2、4字节长的二进制形式的代码数据进行译码。代码数据一致时,
对应的位即为“1”,如不一致则为“0”。
形式指定
代码信号的地址
译码指示
译码结果输出地址
〔形式指定〕代码数据的形式为
1:1字节长 2:2字节长 4:4字节长
〔代码信号的地址〕
指定进行译码的数据的起始地址。
〔译码指示〕
8个译出代码号的第一个号。
〔译码结果输出地址〕
由译码指示指定号的译码结果被输到位0,号+1的译码结果被输到位
1,号+7的译码结果被输到位7。
译码结果输出
形式指定
代码信号的地址
译码指示
译码结果输出地址
·F007.0接通后,对F0010~F0013的4字节进行译码,当译出结果
在3~10的范围内时,与R0100对应的位变为“1”。
03时为“1”
04时为“1”
05时为“1”
06时为“1”
07时为“1”
08时为“1”
09时为“1”
10时为“1”
159 发那科学校
计数器是进行加/减计数的环形计数器。
计数器的形式(二进制/BCD)用系统参数(SYSPRM)进行设定。
计数器号
计数器的初始值为0。
计数器的初始值为1。
是加计数。(初始值为CN0地设定)
是减计数。(初始值为计数器预置值)
将计数器复位。
累计值被复位,加计数时,根据CN0的设定变为0或
1,减计数时变为计数器预置值。
取0到1的前沿进行计数。
是计数结束输出。加计数时为最大值,减计数最小值时为1。〔计数器号〕RB4,RB6/RC4为1~50
其它为1~20
计数器号
·“ON”是常“1”信号。
·从1~10进行计数的计数器。
·当X000.0为“1”时,计数器即复位到“1”。
·在X000.1的上升沿,计数器加1。
·计数器的值达最大值10时,R000.0变为“1”。
·若控制条件ACT的断开时,其后X000.1即使从“0”变为“1”,计数器也不动作。
B-10141/05160
是进行加/减计数的二进制形式的环形计数器。
计数器
计数器预置值地址
计数器寄存器地址
计数器的初始值为0。
计数器的初始值为1。
是加计数。(初始值为CN0的设定)
是减计数。(初始值为计数器预置值)
将计数器复位
累计值被复位,加计数时,根据CN0的设定变为0或
1,减计数时变为计数器预置值。
取0~1上升沿进行计数。
是计数结束输出。加计数时为最大值,减计数最小值时为1。
〔计数器预置值地址〕指定2字节的存储器的起始地址。
〔计数器寄存器地址〕指定连续的4字节的存储器的起始地址。头2字节为
累计值,后2字节为系统的工作区。
计数器预置值地址
计数器寄存器地址
·“ON”为常“1”信号。
·从1~10进行计数的计数器。
·当X000.0为1时,计数器(D0102.3)即变为“1”。
·在X000.1的信号的前沿,计数器为+1。
·计数器的值达最大值时,R000.0变为“1”。
·在R000.0=1时,输入X000.1,即回到最小值1。
161 发那科学校
回转控制判别回转体的下一步回转方向,计算出进行回转的步数,或计算到达目标位置前一步的步数。
(回转方向输出 0:正转 1:反转)
回转体的分度数
当前位置地址
目标位置地址
算出结果输出地址
回转体的位置号是从0开始的连续号。
回转体的位置号是从1开始的连续号。
回转体的位置号是BCD2位(1字节)的数据。
回转体的位置号是BCD4位(2字节)的数据。
不判别下一步回转方向。(始终正转)
判别下一步回转方向。(方向输出到W1)
计算到达目标位置的步数。
计算到达目标位置前一步的步数。
计算目标位置的号。
计算到达目标位置的步数。
执行ROT命令。
回转方向为正转。
回转方向为反转。
〔回转体分度数〕设定回转体转位的数目。
〔当前位置地址〕存储回转体当前步号的起始地址。
〔目标位置地址〕存储目标位置的起始地址。
〔算出结果输出地址〕算出的步数的输出地址。
(回转方向)
回转体的分度数
当前位置地址
目标位置地址
算出结果输出地址
·“ON”始终为“1”的信号。
·X000.0接通时,计算分度数为10的回转体从R100的当前位置到
F018的步数,并把结果写入R102。
·此时的回转方向被输出到R000.0。
B-10141/05162
二进制
回转控制可用地址指定回转体的分度数。另外,进行处理的数值都为二进制形式。其
他功能与ROT命令相同。
(回转方向输出 0:正转 1:反转)
形式指定
回转体的分度数地址
当前位置地址
目标位置地址
算出结果输出地址
回转体的位置号是从0开始的连续号。
回转体的位置号是从1开始的连续号。
不判别下一步回转方向。(始终正转)
判别下一步回转方向。(方向输出到W1)
计算到达目标位置的步数。
计算到达目标位置前一步的步数。
计算目标位置的号。
计算到达目标位置的步数。
执行ROT命令。
回转方向为正转。
回转方向为反转。
〔形式指定〕1:1字节长 2:2字节长 4:4字节长
〔回转体分度数〕设定回转体转位的数目。
〔当前位置地址〕存储回转体当前步号的起始地址。
〔目标位置地址〕存储目标位置的起始地址。
〔算出结果输出地址〕算出的步数的输出地址。
(回转方向)
形式指定
回转体分度数地址
当前位置地址
目标位置地址
算出结果输出地址
·“ON”始终为“1”的信号。
·X000.0接通时,计算分度数目10的回转体从R100的当前位置到
F018的步数,并把结果写入R102。
·此时的回转方向被输出到R000.0。
163 发那科学校
代码变换用2位的BCD码指定变换数据表内的号,将与输出的表内号对应的2位或4位BCD码输出。
(出错输出 1:出错)
变换数据数
变换输入数据地址
变换输出数据地址
变换数据表的数据为BCD2 位。
变换数据表的数据为BCD4 位。
把错误输出W1复位。
执行COD命令。
变换输入号超过了变换数据数,指令出错。
〔变换输入数据地址〕指定表内号的地址(1字节)。
〔变换输出数据地址〕变换结果的存储地址。
变换数据数
变换输入数据地址
变换输出数据地址
称为变换表
时,
二进制码
变换用2位的二进制码指定变换数据表内的号,将与输入的表内号对应的1、2、4字节的数值输出。
(出错输出 1:出错)
形式指定
变换数据数
变换输入数据地址
变换输出数据地址
把错误输出W1复位。
执行COD命令。
变换输入号超过了变换数据数,指令出错。
〔形式指定〕1:1字节长 2:2字节长 4:4字节长
B-10141/05164
逻辑乘后数据传送数据传送据地址指定的1字节的数据与比较数据进行逻辑乘(AND),并把结果写入输出数据地址。
比较数据高位4位
比较数据低位4位
输入数据地址
输出数据地址
比较数据高位4位
比较数据低位4位
输入数据地址
输出数据地址·数据的屏蔽
·断开指定位
逻辑和后数据传送用输入数据地址指定的1字节的数据与比较数据进行逻辑和(OR),并把结果写入输出数据地址。
输入数据地址
比较数据地址
输出数据地址
输入数据地址
比较数据地址
输出数据地址·接通指定位
传送1字节
数据
把1字节的数据从被指令的传出位置地址传送到传入位置地址。
传出位置地址
传入位置地址
传出位置地址
传入位置地址
·把R100的值传送到R200。
165 发那科学校
把2字节的数据从被指令的传出位置地址传送到传入位置地址。
传送2字节
数据
传出位置地址
传入位置地址
传出位置地址
传入位置地址
·把R100和R101的值传送到R200和R201。
把任意字节的数据从被指定的传出位置地址传送到传入位置地址。
传送任意
字节数据
传送字节数(1~200)
传出位置地址
传入位置地址
传送字节数
传出位置地址
传入位置地址
·把R100~R149的值传送到R200~R249。
断开COME命令前的区间线圈。
公用线控制
进行断开的线圈数
无条件断开COME之前的线圈。
什么都不动。
〔进行断开的线圈数〕RB/RC以外的PMC型号必须指定“0”。
·X000.0为“0”时,信号X,Y,Z将无条件地变为“0”。
B-10141/05166
跳过JMPE命令前的区间。
跳转
进行跳过的线圈数
不跳转。执行下面的命令。
跳过指定区间。
〔进行跳过的线圈数〕RB/RC以外的PMC型号必须指定“0”。
·X000.0为“1”时,信号X,Y,Z不变化。
转移到被指定标号。
标号跳转1
跳入位置标号
不跳转。执行下面的命令。
跳转到被指定的标号。
〔跳入位置的标号号〕L1~L9999
指定不跳过主程序、子程序等的程序单位的范围的标号。
对1个标号也可指定多个JMPB命令。
另外,也可把跳转命令作成嵌套。
使用该命令向前跳转时,请注意不要造成无限循环。
跳入位置的标号号
·X000.0为“1”时,转移到标号10。
167 发那科学校
转移到被主程序指定的标号。
标号跳转2
跳入位置的标号号
不跳转。执行下面的命令。
跳转到被指定的标号。
〔跳入位置的标号号〕L1~L9999
指定主程序上的标号号。
对1个标号也可指定多个JMPC命令。
使用该命令进行跳转时,请注意不要造成无限循环。
跳入位置的标号号
·X000.0为“1”时,转移到主程序的标号10。
定义标号。
标号
标号号(L1~L9999)
〔标号号〕L1~L9999
每个主程序、子程序可使用相同的标号号。
B-10141/05168
奇偶校验对被指定的地址进行奇偶校验,如不正常时,输出出错报警。
(出错输出)
校验数据地址
进行偶数校验。
进行奇数校验。
把出错输出W1复位。
执行奇偶校验命令。
在奇偶校验中发生错误时变为接通。
校验数据地址
·X000.0接通时,在X010的位型数据中
“1”的数不是奇数时,出错输出R000.0即变为“1”。
·信号F001.1闭合时出错输出R000.0即被复位。
169 发那科学校
数据变换把1或2字节的数据从二进制码变换成BCD码,或从BCD码变换成二进制码。
(出错输出 1:出错)
输入数据地址
输出数据地址
变换1字节的数据。
变换2字节的数据。
从二进制码变换成BCD码。
从BCD码变换成二进制码。
把出错输出W1复位。
执行数据变换命令。
输入数据应为BCD码的地方,如果已是二进制码,或从二进制码
变换成BCD码时超过指定字节长即进行出错报警。
输入数据地址
输出数据地址·把设定在R100中的1字节的BCD码变换成二进制码后输出到R102。
时,为
B-10141/05170
扩展
数据变换把1、2、4字节的二进制码变换成BCD码,或将BCD码变换成二进制码。
(出错输出)
形式指定
输入数据地址
输出数据地址
输入的BCD码的符号为正。
输入的BCD码的符号为负。
从二进制码变换成BCD码。
从BCD码变换成二进制码。
把出错输出W1复位。
执行数据变换命令。
输入数据应为BCD码的地方,如果已是二进制码,或从二进制码
变换成BCD码时,超过指定字节长即进行出错报警。
〔形式指定〕1:1字节 2:2字节 4:4字节
〔运算输出寄存器〕
从二进制码变换成BCD码后的符号,把结果存在运算输出寄存器中。
零符号为负
溢出
形式指定
输入数据地址
输出数据地址
·把设定在R100中的1字节的BCD码变换成二进制码后,输出到R102。
时,为
171 发那科学校
大小比较比较2位或4位BCD的数值,把比较结果输出到W1。
(比较结果输出)
形式指定
基准数据(常数或地址)
比较数据地址
比较BCD码2位。
比较BCD码4位。
基准数据>比较数据
基准数据≤比较数据
〔基准数据形式指定〕
0:基准数据为常数 1:基准数据为指定地址
形式指定
基准数据/地址
比较数据地址
·X000.0接通时,比较R100和R102的值,R100≤R102时,R000.0就接通。
二进制
大小比较对1、2、4字节的二进制形式数据进行比较。
比较结果输出到运算输出寄存器(R9000)。
基准数据形式指定
基准数据(常数或地址)
比较数据地址
〔基准数据形式指定〕
1:1字节 2:2字节 4:4字节
0:输入数据是常数。
1:输入数据用地址进行指定。
〔比较输出寄存器〕
基准数据=比较数据
基准数据<比较数据
基准数据形式指定
基准数据/地址
比较数据地址·X000.0接通时,对R100、R101和R102、R103的2字节的值进行比较。值一致时,R9000.0=1;R100、R101比R102、R103小时,R9000.1=1。
B-10141/05172
一致性判断比较BCD形式的数据,判断是否相同。
(判断结果 0:不一致 1:一致)
基准数据形式指定
基准数据(常数或地址)
比较数据地址
比较BCD码2位。
比较BCD码4位。
基准数据≠比较数据
基准数据=比较数据
〔基准数据形式设定〕
0:基准数据为常数 1:基准数据为指定地址
形式指定
基准数据/地址
比较数据地址
·X000.0接通时,比较R100和R102的值,R100=R102时,R000.0即接通。
173 发那科学校
功能指令说明 FANUC i PMC
张俊基笔记(功能指令说明)
FANUC oi系统——PMC-功能指令 编号缩写注释 SUB1END1第一级顺序程序结束 SUB2END2第二级顺序程序结束 SUB3TMR可变定时器,其设定的时间在屏幕的定时器画面中显示和设定 ACT=启动信号 SUB4DEC译码,当从译码地址读取的BCD码与译码指令中的给定值对比,一致输出“1”,不同输出“0”。主要用于M或T功能的译码 SUB5CTR计数器,可作预置型,环型,加/减计数器,并可选择1或0作为初始值 CN0=初始值选择 UPDOWN=加/减计数选择 RST=复位 SUB6ROT旋转控制,用于回转控制,如刀架,旋转工作台等 RN0=转台的起始号1或0 BYT=位置数据的位数 DIR=是否执行旋转方向短路径选择 POS=选择操作条件 INC=选择位置数或步数 SUB7COD代码转换,将BCD代码转换为两位或四位BCD数字 SUB8MOVE逻辑乘数数据传送,将逻辑乘数与输入数据进行进行逻辑乘,结果输出到指定地址。也可从输入地址中,八位信号中,排除不要的位数 SUB9COM公共线控制,控制直到公共结束指令(COME)范围内的线圈工作 SUB10JMP跳转,用梯形图程序的转移。当执行时,跳至跳转结束指令(JMPE)而不执行与JMP指令之间的梯形图 SUB11PARI奇偶校验,对数据进行奇偶校验,检测到异常时输出报警 O.E=0时,偶数校验;O.E=1时,奇数校验 SUB14DCNV数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码 CNV=0时,二进制码转换为BCD码; NCV=1时,BCD码转换为二进制码 SUB15COMP数值大小判别,将输入值与比较值进行比较来判别大小。输入值小于等于比较值,则输出为1 BYT=0时,处理数据为两位BCD; BYT=1时,四位BCD SUB16COIN一致性检测,检测输入值与比较值是否一致。此指令只适用于BCD数据 SUB17DSCH数据检索,在数据表(D)中搜索指定的数据,如未找到指定数据,则输出为1 SUB18XMOV变址数据传送,读取或改写数据表(D)中的内容 RW=0时,读出;RW=1时,写入 SUB19ADD加法运算,BCD码两位或四位数据相加; 运算结果超过加数指定格式,输出置1 SUB20SUB减法运算,BCD码两位或四位数据相减; 运算结果为负,输出置1 SUB21MUL乘法运算,BCD码两位或四位数据相乘; 运算结果超过加数指定的格式,输出置1
PMC梯形图功能指令集合带注解
SUB3 TMR 0001 定时器号 ACT 当定时器的ACT 接通后,到达设定时间后,才有输出。(定时器的时间是在PMC 参数的界面设置的)
SUB24 TMRB 0001 5000 定时器号 设定时间 ACT 当定时器的ACT 接通后经过5秒,才有输出。(定时器的时间是在PMC 参数的界面设置的)
SUB54 TMRC D0100 R200 定时器精度 定时器设定时间地址(该地址用来存放设定时间的值) 定时器寄存地址(系统使用的作业区域需要4字节)ACT 当定时器的ACT接通后经过定时器设定时间地址中设定的时间后,才有输出。(定时器的时间地址是在PMC参数的界面设置的)
译码功能指令 SUB4 DEC R300 0311 代码信号的地址 译码指示 前两位是值指示:指示进行译码的数值。 后两位是位数指示:01 只对低位数经行译码 10 只对高位 数进行译码 11 对两位数均进行译码 ACT 对2 位的BCD 码进行译码,当ACT 接通时,如果R0300为00000011(3)则有输出。
二进制译码功能指令 SUB25 DECB 4 F010 0003 R100 形式指定:1 1字节长 2 2字节长 4 4字节长 代码信号地址:指定进行译码数据的起始地址 译码指示:8个译出代码号的第一个号 译码结果输出地址:由译码指示指定号的译码结果被输出到位0,号+1 的译码结果被输出到位1,号+7的译码结果 被输到位7。 ACT 对1、2、4字节长的二进制形式的代码数据进行译码。代码数据一致时,对应的位即为“1”。 当ACT 接通时,对F0010~F0013的4字节进行译码,当译出结果在3 到10的范围内时,与R0100对应的位变为1。
FANUC_PMC的操作
FANUC PMC的操作 一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓ [TITLE]:标题画面 [STATUS]:信号状态画面 [ALARM]:PMC报警画面 [TARCE]:PMC信号追踪画面 [I/OCHK]:IO LINK诊断画面
[PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DATA] :数据表画面 [SETING]: 参数设定画面 [STOP]/[RUN] [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面
FANUC PMC结构
1. 了解G、F、X、Y 信号的意义 G:PMC 输出至CNC 的信号(CNC 输入) 是FANUC 公司设计CNC 时根据机床操作的要求及CNC 系统本身应具备的功能而设计好的、 使CNC 执行工作的指令。 这些信号中有些是启动CNC 某个动作的子程序。这些子程序是CNC 控制软件的一部分:根据机床 的实际动作设计好的机床的强电控制功能。如:急停信号*ESP(G8.4);自动加工程序启动信号ST (G7.2);CNC 停止主轴电机的信号*SSTP(G29.6)。工作方式选择信号 MD1/MD2/MD4(G43.0~2)、 DNCI(G043#5)、ZRN(G043#7)等等。例如,用方式选择信号确定的工作方式见下表:
另外一些信号是PMC 通知CNC,使CNC 改变或执行某一种运行。如:FIN(G4.3)----是PMC 通知CNC 辅助功能M 或换刀功能T 已经结束执行。CNC 接受到该信号后即可启动下个加工程序段 的执行。下表为CNC 运行时常用的部分G 信号。
F:CNC 输出至PMC 的信号 其中的一些信号是反映CNC 运行状态的标志,表明CNC 正处于某一状态。如,AL(F1.0): 表示CNC 处于报警状态。MV(F102):进给轴移动中。 另一些信号是CNC 响应X(经过G 信号)后,执行某一运行的结果,用以通知PMC。PMC 收到 这些F 信号,视其具体情况,再做适当处理。 还有一些信号是加工程序指令的译码输出。如:M 代码(F10~F13);T 代码
(F26~F29)。CNC 将 这些信号输出给PMC 进行处理。下表列出了部分常用的F 信号。 X:由机床输入至PMC 的信号 是操作员由机床操作面板上输入的按钮、按键、开关信号。可以理解为是由操作者发出的使 CNC(机床)执行某一工作的命令,是上述G 信号的指令。在梯形图中X 总是G 的控制源。X 信 号的地址由机床厂的电气设计人员随意定义,但是有些X 信号的地址已经由CNC 固定,见下表。 这些信号都是需要CNC 紧急处理并执行的事件或动作。
fanucpmc梯形图
FANUC PMC梯形图 1. 了解G、F、X、Y 信号的意义 G:PMC 输出至CNC 的信号(CNC 输入) 是FANUC 公司设计CNC 时根据机床操作的要求及CNC 系统本身应具备的功能而设计好的、使CNC 执行工作的指令。 这些信号中有些是启动CNC 某个动作的子程序。这些子程序是CNC 控制软件的一部分:根据机床 的实际动作设计好的机床的强电控制功能。如:急停信号*ESP();自动加工程序启动信号ST ;CNC 停止主轴电机的信号*SSTP()。工作方式选择信号MD1/MD2/MD4(~2)、 DNCI(G043#5)、ZRN(G043#7)等等。例如,用方式选择信号确定的工作方式见下表:
另外一些信号是PMC 通知CNC,使CNC 改变或执行某一种运行。如:FIN()----是PMC 通知CNC 辅助功能M 或换刀功能T 已经结束执行。CNC 接受到该信号后即可启动下个加工程序段 的执行。下表为CNC 运行时常用的部分G 信号。
F:CNC 输出至PMC 的信号 其中的一些信号是反映CNC 运行状态的标志,表明CNC 正处于某一状态。如,AL():表示CNC 处于报警状态。MV(F102):进给轴移动中。
另一些信号是CNC 响应X(经过G 信号)后,执行某一运行的结果,用以通知PMC。PMC 收到 这些F 信号,视其具体情况,再做适当处理。 还有一些信号是加工程序指令的译码输出。如:M 代码(F10~F13);T 代码(F26~F29)。CNC 将 这些信号输出给PMC 进行处理。下表列出了部分常用的F 信号。
X:由机床输入至PMC 的信号 是操作员由机床操作面板上输入的按钮、按键、开关信号。可以理解为是由操作者发出的使CNC(机床)执行某一工作的命令,是上述G 信号的指令。在梯形图中X 总是G 的控制源。X 信 号的地址由机床厂的电气设计人员随意定义,但是有些X 信号的地址已经由CNC 固定,见下表。
FANUC系统PMC的功能指令
FANUC 系统PMC 的功能指令 1.1.1 顺序程序结束指令 FANUC-0i 系统的PMC 程序结束指令有第1级程序结束指令END1、第2级程序结束指令END2和程序结束指令END 三种,其指令格式如图1-1所示。 SUB64END SUB1END1SUB2END2图1-1 程序结束功能指令格式 a )第 1 级程序结束 b )第 2 级程序结束 c )程序结束 . . . . a ) b ) c ) 1. 第1级程序结束指令END1 第1级程序结束指令END1每隔8ms 读取的程序,主要处理系统急停、超程、进给暂停等紧急动作。因为第1级程序过长将会延长PMC 整个扫描周期,所以第1级程序不宜过长。如果不使用第1级程序时,必须在PMC 程序开头指定END1,否则PMC 无法正常运行。 2. 第2级程序结束指令END2 第2级程序用来编写普通的顺序程序,如系统就绪、运行方式切换、手动进给、手轮进给、自动运行、辅助功能(M 、S 、T 功能)控制、调用子程序及信息显示控制等顺序程序。通常第2级的步数较多,在一8ms 个内不能全部处理完(每个8ms 内都包括第1级程序),所以在每个8ms 中顺序执行第2级的一部分,直至执行第2级的终了(读取END2)。在第2级程序中,因为有同步输入信号存储器,所以输入脉冲信号的信号宽度应大于PMC 的扫描周期,否则顺序程序会出现误动作。 3. 程序结束指令END 将重复执行的处理和模式化的程序作为子程序登录,然后用CALL 或CALLU 命令由第2级程序调用。包含子程序PMC 的梯形图的最后必须用END 指令结束。 图1-2为某一数控立式加工中心应用PMC 程序结束指令的具体例子。
PMC的定义、功能和角色
PMC的定义、功能和角色 PMC的定义:PMC 是Production Material Control 的缩写形式,意思为生产及物料控制,通常分为两个部分: (一)、PC:PC是指生产控制或生产管制(台、日资公司俗称生管)主要职能是生产的计划与生产的进度控制; (二)、MC:物料控制(俗称物控)主要职能是物料需求计算、物料计划、物料请购、物料调度、物料的控制(坏料控制和正常进出用料控制)等。 PMC在台、日资企业通常叫生管部,大陆的企业通常叫计划部、物控部等,主要是侧重点不同;譬如五金加工行业,偏重于生产进度的控制,则称为计划部;电子、机械行业则偏重于物料的控制,则称物控部,实际上两种部门称谓都没有完全概括PMC的全部职能,只是侧重点不同而已。 PMC部是企业的大脑,PMC部的计划能力、协调能力以及控制能力在企业的整体动作中起着决定性的作用。 强化企业动作的整体统筹和监控是增强企业动作稳定性、降低不确定性的重要手段。 PMC部是业务、物料、生产、工程技术的交叉处,客户需求信息、产品技术信息、物料供应信息、车间生产信息都在PMC部交汇,然后再“加工”成一道道的动作指令,流向各个部门和岗位。它根据营销部提供的“做什么”、技术部提供的“怎么做”、物料供应部提供的“有无料做”、生产部提供的“有无产能做”等几个方面的信息,进行综合平衡分析,形成“何时采购物料”、“采购何种物料”、“何时领取物料”、“领取何种物料”、“领多少物料”、“何时开工”、“何时完工”等工作指令。分别给予采购、仓库、车间、业务等部门,作为承诺客户交期、安排车间生产、采购物料入库等一系列动作的依据。并通过跟单、跟催等形式来确保下达指令的完成,或者根据异常状况进行指令的调整。 狭义的PMC就是指对生产计划和物料的控制,周密制订合理的生产计划,满足订单需求;在满足销售订单的前提下使库存保持最低(典型的如:丰田JIT、零库存的理念)。 广义的PMC是指对整个物流的控制,这个过程包括从接到订单制订生产计划开始到物料请购和采购、库存管理等各环节。这个概念告诉我们,PMC包含两个主要内容和一个中心。两个主要内容是指生产调度和物流管理;一个中心是指控制活动为中心。 功能齐全的PMC部应当充当如下角色: 一、生产调度即生产系统的指挥官。 PMC部作为销售和生产系统承上启下(非纵向即行政意义的上下、而是横向即流程意义的上下)枢纽部门,对上是为客户负责,对下是为企业负责。订单评审一旦接受,表示生产系统开始启动,
FANUC系统PMC编程重点
FANUC系统PMC编程重点 FANUC系统的PMC在哪里呢我们似乎无法看见完全的PMC。其实,FANUC PMC是典型的与CNC集成在一起的内装式PLC,其CPU和存储器就在CNC控制单元的主板上。 因此,FANUC PMC控制系统的硬件如图1所示。I/O单元与PMC CPU通过接口JD1A/JD51A 传输信号,而机床侧输入输出元件与I/O单元则通过接口CB104、CB105、CB106、CB107传输信号。 图1 FANUC PMC硬件组成 相关实用书籍推荐 1 外部标准输入/输出信号 FANUC机床侧标准输入/输出信号接入电路如图2所示。输出信号电路中中间继电器线圈上要并联二极管,以便当线圈断电时,为感应电流提供放电回路,否则极易损坏驱动电路。这个二极管称为续流二极管。 图2 FANUC外部标准输入/输出信号 2 PMC地址及信号种类
(1)地址表示 每个PMC输入/输出接口(interface)信号用地址(address)来区别。所谓地址是指与机床侧的输入/输出信号、与CNC之间的输入/输出信号、内部继电器、计数器、保持型继电器、数据表等各信号的存在场所的号码。 PMC地址由字节组成,即一个地址可以表示8个信号。地址由地址号和位号组成,地址号的前面必须要有一个字母,它表示信号的种类。如图3所示。 图3 PMC地址表示 某一个信号可以采用助记符(symbol)来方便记忆,如这个地址表示第4轴回参考点时的减速信号,*DEC4(通常是英文简写)就是其助记符;是紧停信号,*ESP就是其助记符。 (2)地址种类 FANUC PMC地址种类(address type)主要有X、Y、G、F等,如图4所示。CNC 与PMC 之间的G、F 信号及地址是由FANUC公司确定的,PMC编程者只可使用不能改变。而CNC与MT之间的X、Y信号及地址是由PMC 编程者自行定义。 图4 PMC信号种类及关系 另外,PMC 本身还存在imaginary address,这些地址无法用仪器测量到,而只能通过PMC诊断监控其状态变化。包括了:
PMC功能指令详解带例
功能命令 编号 功能名命令号处理内容SA1 SA5 SB5 SB6 SB7 1END1SUB 1第1级程序结束○○ 2 END2 SUB 2第2级程序结束 ○○ 3END3SUB 48第3级程序结束×× 4 TMR SUB 3定时器处理 ○○ 5TMRB SUB 24固定定时器处理○○ 6TMRC SUB54追加定时器处理 ○○ 7DEC SUB 4BCD译码处理○○ 8DECB SUB25二进制译码处理 ○ ○ 9CTR SUB 5计数器处理○○ 10 CTRC SUB 55 追加计数器处理 ○○ 11ROT SUB 6BCD回转控制○○ 12 ROTB SUB 26 二进制回转控制 ○○ 13COD SUB 7BCD码变换○○ 14 CODB SUB 27二进制码变换 ○○ 15MOVE SUB 8逻辑乘后数据转送○○ 16 MOVOR SUB 28 逻辑加后数据转送 ○○ 17MOVB SUB 431字节数据转送×○ 18 MOVW SUB 44 2字节数据转送 × ○ 19MOVN SUB 45任意字节数据转送×○ 20 COM SUB 9公用线控制开始 ○○ 21COME SUB 29公用线控制结束○○ 22 JMP SUB 10跳转 ○○ 23JMPE SUB 30跳转结束○○ 24 JMPB SUB 68标号跳转1 ×○25JMPC SUB 73标号跳转2×○ 26 LBL SUB 69标号 ×○ 27PARI SUB 11奇偶校验○○ 28 DCNV SUB 14数据变换 ○○ 29DCNVB SUB 31扩展数据变换○○ 30 COMP SUB 15BCD大小比较 ○○ 31COMPB SUB 32二进制大小比较○○ 32 COIN SUB 16BCD一致判断 ○○ 33SFT SUB 33移位寄存器○○ B-10141/05154
FANUC PMC的操作
FANUC PMC的操作 ?一:PMC的软键布局 PMC画面的进入 [SYSTEM]→[PMC] [PMCLAD]:梯形图的监控与编辑画面 ↓ 梯形图程序结构 [COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图 [LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序 [ZOOM]:梯形图监控和编辑画面 [PMCDGN]:PMC信号的诊断 ↓ [TITLE]:标题画面 [STA TUS]:信号状态画面 [ALARM]:PMC报警画面 [TARCE]:PMC信号追踪画面 [I/OCHK]:IO LINK诊断画面
[PMCPRM]:PMC参数 ↓ [TIMER]:定时器画面 [COUNTR]:计数器画面 [KEEPRL]:保持型k地址画面 [DA TA] :数据表画面 [SETING]:参数设定画面 [STOP]/[RUN]:PMC停止/启动 (正常运行时请不要进行此项操作) [EDIT]:PMC编辑画面(进入编辑画面时需停止PMC) ↓ [TITLE]:标题的编辑 [SYMBOL]:信号注释的编辑 [MESAGE]:外部信息的编辑 [MODULE]:IO模块的设定 [CROSS]:交叉点的设定 [CLEAR]:PMC的删除 ↓ [CLRTTL]:删除标题 [CLRLAD]:删除梯形图 [CLRSYM]:删除系统参数 [CLRMSG]:删除外部信息 [CLRALL]:删除全部 [CLRMDL]:删除IO模块设定 [CONDNS]:压缩PMC区域 [CLRPRM]:删除PMC参数 [SYSPRM]:系统参数画面 计数器数据类型=二进制/BCD码 [MONIT]:在线监控画面