数字控制器的直接设计论文
计算机控制课程作业
姓名:王娟娟
班级:自动化091班
学号:09423053
数字控制器的直接设计
摘要
随着工业领域和科学发展的进步,传统的控制方法已经不适用于现在的控制要求,于是数字控制运用而生。数字控制器的主要作用和模拟控制是一样的:控制(闭环)系统的响应,数字控制器区别模拟控制器主要是在实际数字控制器,必定是一台计算机(或者一台微控制器),因为一台数字计算机不能接收模拟信号,它不能被直接接合来反馈传递函数或者设定值,同样,一台数字计算机不能产生一个实际的模拟信号。而数字控制中一个最主要的系统就是最小拍控制系统。所谓最小拍系统,是指在典型输入(如单位阶跃、单位斜坡或单位加速度信号)作用下,系统具有最快的响应速度,能在有限拍内结速过渡过程,而且在采样时刻上无稳态误差的离散系统。最小拍系统是一种时间最优的控制系统,它可以做到无超调,而且设计方法也很简单。误差信号反映了系统输出对输入信号的复现差异程度,通过分析该信号的变化情况,可以直接看出系统的动态误差和稳态误差。目前最小拍比较常见的应用是在输入信号为典型阶跃输入的机械装置精确位置控制和液压伺服系统等方面,为弥补其存在静差的缺陷也采用与其它控制策略结合的方案。本文主要介绍了数字控制器的直接设计方法,以及在控制器设计中所用到的最小拍系统和最小拍无纹波系统的原理和应用。
关键字:数字控制器最小拍系统控制策略模拟控制器
一、背景分析
微处理器的诞生已经完全改革了整个检测和控制工业,最初,液位风力和机械连接被用来作为控制器和传感元件,在控制工程中,这部分带有许多灵活性,并用这些元件实现连续控制,之后这些产品,就被晶体管和运算放大器这些电子模拟元件取代了,电子元件为广泛的PID 控制器敞开大门,允许几乎所有的控制方案来适应实际中的各类系统。数字控制器的主要作用和模拟控制是一样的:控制(闭环)系统的响应,数字控制器区别模拟控制器主要是在实际数字控制器,必定是一台计算机(或者一台微控制器),因为一台数字计算机不能接收模拟信号,它不能被直接接合来反馈传递函数或者设定值,同样,一台数字计算机不能产生一个实际的模拟信号,例如3PA~15PA的大气压力,0V~10V 电压信号,或者4mA~20mA电流信号,所以它不能直接与最终控制元件相接合。数字控制器中的A/D 转换器接收数字量的给定值和测量值,根据它的内部程序软件获得相关信息,并通过D/A转换器前产生一个合适的输出,软件编程来实现适合闭环控制系统的控制算法。传统模拟控制器已经被执行控制算法的计算机软件取代了,其唯一目的是产生偏差信号作为给定值和反馈值的差异。对于一台数字计算机能够通过模拟和数字转换器,接收给定值和反馈值并且在内部产生偏差信号,这是一个非常微不足道的任务。因此,在实际中,控制器被一系列计算机代码所取代,它接收数字设定值并且减去检测值。
上世纪六十年代美国控制理论学者Kalman 提出了无差拍数字控制的基本思想,作为一种优点和缺点都很突出的控制策略,其优势在于动态响应快。但是,要求系统的数学模型比较精确,鲁棒性也比较差。采用和计算所造成的延时限制了输出脉宽,以上缺陷限制了无差拍的应用,经常要与其它控制方法结合或采用改进算法。
在连续控制系统中,PID 控制器一般来说能够取得满意的响应性能,PID 控制作用的调整只限于调整比例增益,积分增益以及微分增益。数字控制在逆变器方面的应用中,控制
算法却不仅限于此[24],事实上,数字控制器可以产生很多种控制作用,如快速系统离散域直接设计和慢速系统离散域直接设计;其中,慢速系统离散域直接设计一般应用于被控对象具有大惯性,长滞后性质的情况下。当控制器是采用快速系统离散域直接设计法来设计,同时输入为特殊类型的典型输入时,在一定的采样周期内,可以使误差趋近于零,也就是说,在尽可能少的采样周期内,误差趋于零并维持零。计算机控制系统以采样周期的数目表示时间的长短,将采样周期的个数计为拍数,因此将拍数较少,反应较快的快速系统称之为最少拍系统。
目前最少拍比较常见的应用是在输入信号为典型阶跃输入的机械装置精确位置控制和液压伺服系统等方面,为弥补其存在静差的缺陷也采用与其它控制策略结合的方案。如文献[25]中,将最少拍应用于精密直线位移装置控制系统,文章中主要为解决在位移控制系统中出现的不利因素,如切削力的波动,另外,直接驱动引起的负载驱动也有一定的影响,提出了最少拍无波纹控制的零相位误差跟踪控制方案;根据理论分析可知这种方法在保证系统快速响应的同时,同时能消除相位误差。其结果表明最少拍控制方法使系统在正弦信号输入和阶跃输入的情况下,响应快速,准确,同时稳态误差较小。在文献[26][27]中,采用最少拍无纹波设计实现了对机床运动部件高精度的位置控制和电液位置伺服系统的控制。 最少拍具有较快的响应速度,由于这一突出的优点,也出现了与其它控制方法结合使用的情况。文献[28]中采用了它与PID 控制相结合的方案,其中并未对最少拍控制器的设计方案本身做出改进,而是在软件设计中,根据检测到的误差值做出判断继而采用相应的控制算法:在正常情况下,执行的是PID 控制算法,而当检测到误差超过规定的阈值时,则立刻开始进行最少拍控制过程以迅速消除误差。这种控制器结合了PID 控制器的适应性强和最少拍的快速响应的优点,使总体性能得到提高。同时算法简单,适合于用工业控制机、单板机来设计最少拍控制器。
二、 数字控制器的直接设计
2.1数字控制器的直接设计步骤 数字控制器的直接设计步骤如下:
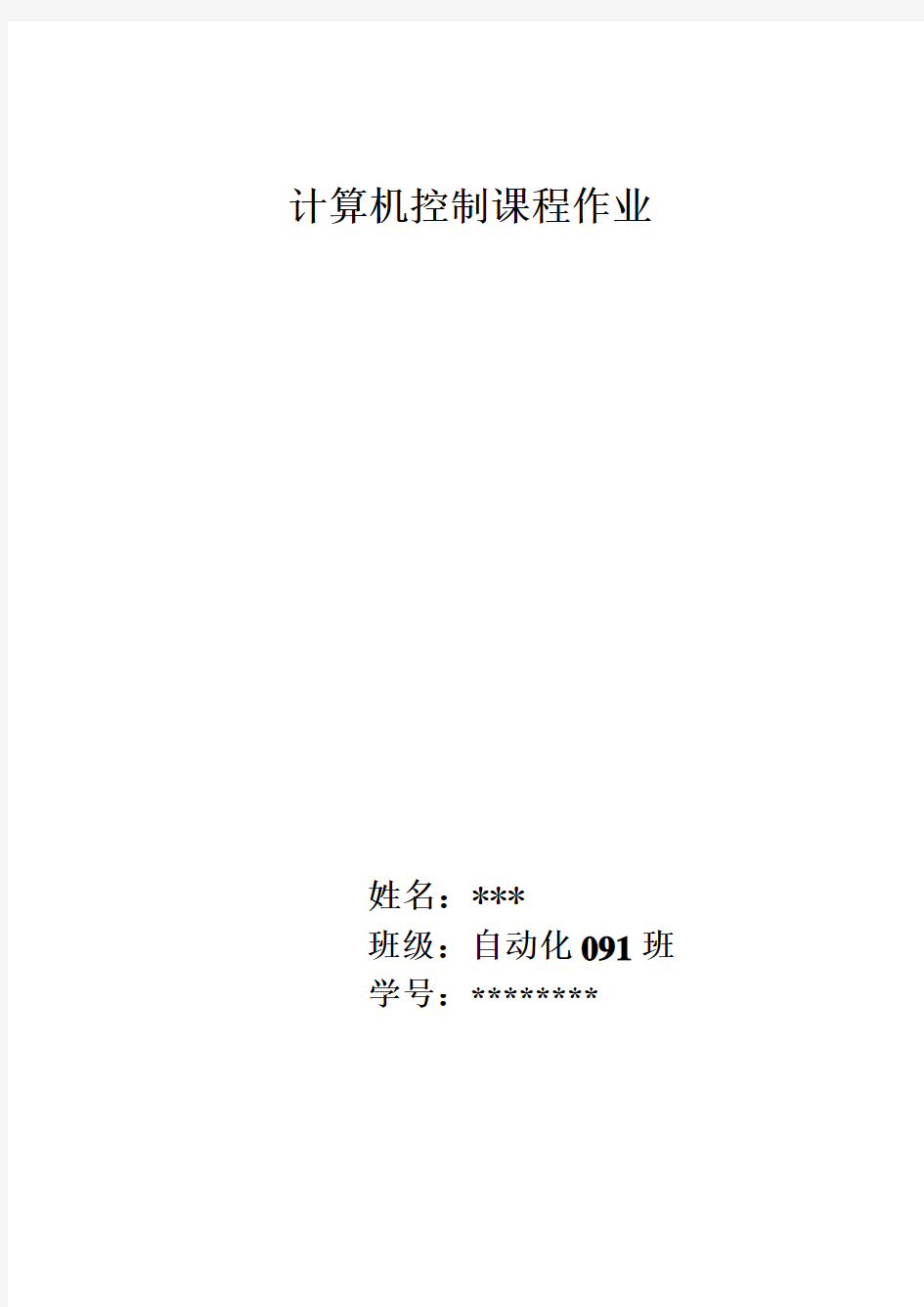
(1)根据控制系统的性能指标要求和其他约束条件确定所需的闭环脉冲传递函数Φ(z) 有一典型数字反馈控制系统如图:
其中:G c (z)—— 被控对象
[]?
??
???-==-)(1)()()(0s G s e Z s G s H Z z G C Ts C ——广义对象的脉冲传递函数 s
e s H Ts
o --=
1)( ——零阶保持器
D(z) —— 数字控制器
Φ (z) —— 系统的闭环脉冲传递函数
系统开环脉冲传递函数为: )()()(z G z D z K ?=Φ
系统的闭环脉冲传递函数为: )
()(1)()()
(1)()(z G z D z G z D z z z K K +=
Φ+Φ=
Φ
(2)求广义对象的脉冲传递函数G(z)
[]??
?
???-==-)(1)()()(0s G s e Z s G s H Z z G C Ts C ——广义对象的脉冲传递函数
(3)求取数字控制器的脉冲传递函数D(z)
系统误差脉冲传递函数:)
(1)
()(11)
()()(z z G z D z R z E z e Φ-=+=
=
Φ
数字控制器输出闭环脉冲传递函数为:
)()()
()(1)()
()()(z G z z G z D z D z R z U z U Φ=+=
=
Φ
若已知以上脉冲传递函数,可计算出D(z): 已知Φ(z),可计算出D(z): )(1)
()(1
)(z z z G z D Φ-Φ?=
已知Φe (z),可计算出D(z): )
()(1)
(1)(z z z G z D e e ΦΦ-?
=
已知ΦU (z),可计算出D(z): )
(1)()
()(1)()(z z z G z z z D U U U Φ-Φ=Φ-Φ=
选取不同的闭环脉冲传递函数,D(z)的选取也不同,但是所选的D(z)必须满足以下条件: ①由此而得到的D(z)是物理可实现的,即必须符合因果律。
②D(z)也必须是稳定的,即D(z)的零、极点的分布必须满足稳定条件。 (4)求取控制算法的递推计算公式。
2.2数字控制器的直接设计特点
与模拟控制相比,采用全数字化控制具有以下明显优势:
(1)高性能的控制策略和智能控制方案更加易于实现,加快了研究进程;
(2)在硬件电路不变的情况下,实现在线修改控制算法,控制更加灵活方便; (3)系统可靠性高,易于标准化,维护方便;
(4)系统的一致性较好,体积小,成本低,生产制造方便;
(5)使得大规模逆变器并联运行系统的可靠性更高。
综上所诉,研究数字控制器设计策略,提高其控制质量,并针对其不足之处加以完善,对于电力电子技术的发展和应用具有重大意义。
三、最小拍系统
3.1最小拍控制系统的设计原理
离散化的设计方法就是:将被控对象和保持器组成的连续部分离散化,直接应用离散控制理论的一套方法进行分析和综合,设计出满足控制指标的数字控制器,由计算机去实现。在采样系统中,通常称一个采样周期为一拍。所谓最小拍系统,是指在典型输入(如单位阶跃、单位斜坡或单位加速度信号)作用下,系统具有最快的响应速度,能在有限拍内结速过渡过程,而且在采样时刻上无稳态误差的离散系统。最小拍系统是一种时间最优的控制系统,它可以做到无超调,而且设计方法也很简单。误差信号反映了系统输出对输入信号的复现差异程度,通过分析该信号的变化情况,可以直接看出系统的动态误差和稳态误差。系统的稳态误差与系统传递函数以及输入信号有关。所以,必须针对不同的输入信号选择合适的误差传递函数,以保证稳态误差为0。
最小拍系统的设计原则是:若系统广义被控对象无迟延且在z 平面单位圆上及单位圆外无零极点,要求选择闭环脉冲传递函数,使系统在典型输入作用下,经最少采样周期后能使输出序列在各采样时刻的稳态误差为零,达到完全跟踪的目的,从而确定所需要的数字控制器的脉冲传递函数。
3.2最小拍控制系统的设计综述
根据最小拍控制系统在3 种不同的典型输入信号下的响应情况,如下几点结论成立:(1)从快速性而言,按单位斜坡输入设计的最小拍系统,在各种输入作用下,其动态过程均为二拍;
(2)从准确性而言,系统对单位阶跃输入和单位斜坡输入,在采样时刻均无稳态误差,但对单位加速度输入,采样时刻上的稳态误差为常量;
(3)从动态性能而言,系统对单位斜坡输入下的影响性能较好,这是因为系统本身就是针对此而设计的,但系统对单位阶跃输入响应性能较差,有100% 的超调量,对输入信号的改变缺乏适应能力用最小拍设计方法设计的数字校正装置可以使系统在减小过渡时间方面达到最优,同时又使得系统稳态误差为0。但从最少拍系统的设计过程中不难发现,这种方法是针对输入信号而设计的,所以这样设计出来的数字控制器的脉冲传递函数只适应于该输入信号,对其它类型输入信号,系统一般不再是最小拍系统,适应性较差;
(4)从平稳性而言,按最小拍方法综合出的系统,其实际输出存在波纹。由于最小拍设计方法只是保证了进入稳态后实际输出与期望信号在采样点上重合,没有保证在非采样点上也重合,也就是说,在非采样时刻系统一般存在波纹。在实际输入信号的值比设计时指定信号的值低,则系统虽然一般会出现超调,且暂态过程变长,但仍然保证系统稳态误差为零。而若实际输入信号的值比指定的值大,则将出现稳态误差。所以,最小拍系统实际上是有误差的系统,而且波纹的存在增加了系统的机械磨损,因此这种方法实用性较差。
3.3最小拍控制系统的应用现状
在连续控制系统中,PID 控制器一般来说能够取得满意的响应性能,PID 控制作用的调整只限于调整比例增益,积分增益以及微分增益。数字控制在逆变器方面的应用中,控制
算法却不仅限于此[2],事实上,数字控制器可以产生很多种控制作用,如快速系统离散域直接设计和慢速系统离散域直接设计;其中,慢速系统离散域直接设计一般应用于被控对象具有大惯性,长滞后性质的情况下。当控制器是采用快速系统离散域直接设计法来设计,同时输入为特殊类型的典型输入时,在一定的采样周期内,可以使误差趋近于零,也就是说,在尽可能少的采样周期内,误差趋于零并维持零。计算机控制系统以采样周期的数目表示时间的长短,将采样周期的个数计为拍数,因此将拍数较少,反应较快的快速系统称之为最小拍系统。
目前最小拍比较常见的应用是在输入信号为典型阶跃输入的机械装置精确位置控制和液压伺服系统等方面,为弥补其存在静差的缺陷也采用与其它控制策略结合的方案。如文献[25]中,将最小拍应用于精密直线位移装置控制系统,文章中主要为解决在位移控制系统中出现的不利因素,如切削力的波动,另外,直接驱动引起的负载驱动也有一定的影响,提出了最小拍无波纹控制的零相位误差跟踪控制方案;根据理论分析可知这种方法在保证系统快速响应的同时,同时能消除相位误差。其结果表明最小拍控制方法使系统在正弦信号输入和阶跃输入的情况下,响应快速,准确,同时稳态误差较小。在文献[3][4]中,采用最小拍无纹波设计实现了对机床运动部件高精度的位置控制和电液位置伺服系统的控制。
最小拍具有较快的响应速度,由于这一突出的优点,也出现了与其它控制方法结合使用的情况。文献[28]中采用了它与PID 控制相结合的方案,其中并未对最小拍控制器的设计方案本身做出改进,而是在软件设计中,根据检测到的误差值做出判断继而采用相应的控制算法:在正常情况下,执行的是PID 控制算法,而当检测到误差超过规定的阈值时,则立刻开始进行最小拍控制过程以迅速消除误差。这种控制器结合了PID 控制器的适应性强和最少拍的快速响应的优点,使总体性能得到提高。同时算法简单,适合于用工业控制机、单板机来设计最小拍控制器。
四、 最小拍无纹波控制系统
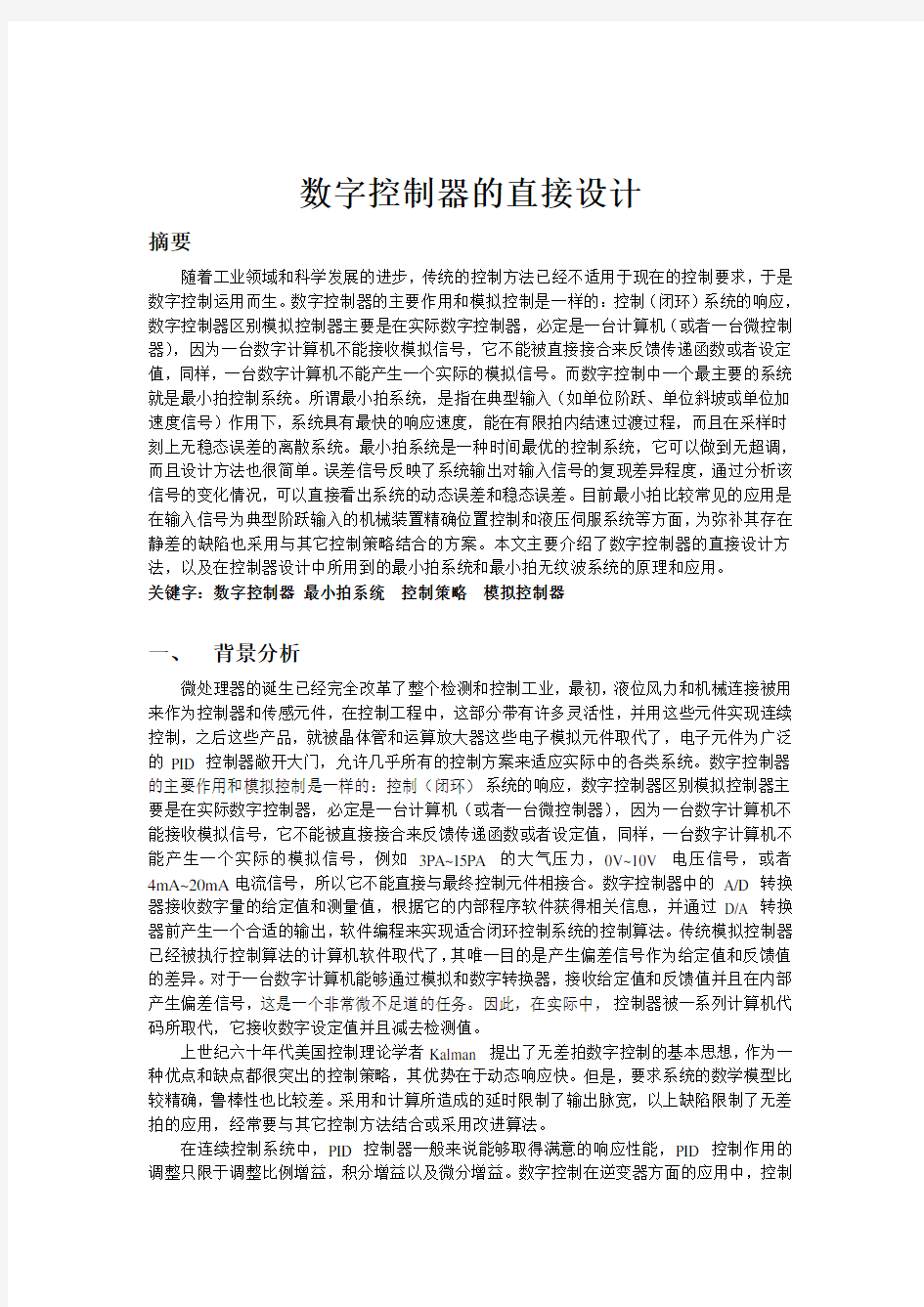
4.1最小拍控制中纹波产生的原因 电机转速计算机控制系统如图: 其
中
:
s
e
s H Ts
--=
1)(0 ——零阶保持器
)
1()(s T s k s G m v c +=
——电机+减
速器
C(s) —— 电机转速
按最小拍设计系统。系统各量变化情况: 1、系统输出C(nT)在采样点之间有纹波,表示电机转速不稳定,不是匀速变化。
2、二拍系统的误差e(nT)。
3、u(nT)在平均值上下波动是转速不稳定的根源。
4、随之v(t)不稳也是引起电机转速不稳的原因。 无纹波设计就是要求u(nT)为恒值。
问题归结为:设计一个系统在典型输入作用下,u(nT)经过有限个周期以后,达到相对稳定。
4.2设计原理及方法
系统的闭环脉冲传递函数为: 2
1
2)
()()(---==
Φz
z
z R z C z
要使u(nT)稳定,就要使 )
()()
()(z z D z R z U e Φ=
是z -1
的有限多项式。
讨论D(z)Φe (z)成为z -1的有限多项式必须满足的条件。由
)
()()()()()(z R z z D z E z D z U e Φ==
可以得到:
)()()
()(1)()(z G z z G z z z D e e Φ=Φ-=
Φ
Φ(z)应包含G(z)的所有零点。
4.3特点
(1)最小拍无波纹系统的设计,是在最小拍控制存在波纹时,对期望闭环响应φ(z)进行修正,以达到消除采样点之间波纹的目的
(2)系统输出在采样点之间的波纹,是由控制量序列的波动引起的,其根源在于控制量的Z 变换中含有非零极点
(3)设计最小拍无波纹控制器时,除了选择φ(z)以保证控制器的可实现性和闭环系统的稳定性之外,还应将被控对象G(z)在单位圆内的非零零点包括在φ(z)中,以便在控制量的Z 变换中消除引起振荡的所有极点。
4.4应用
最小拍无纹波控制系统以其优良的特性可以应用于现代智能控制的多个领域,下面就以其中典型的两个应用做简要说明。
最小拍无波纹控制应用在直流电机控制系统中,能够使电机的转速在最少个采样周期内跟随期望转速,使系统达到无静差的稳态。在整个设计过程,完全根据系统的脉冲传递函数和各信号的Z 变换函数之间的关系推导,是完全准确的,没有任何假设和近似。但最小拍也有缺点,当系统受到干扰时,最小拍表现的无能为力。另外从人的工作量来看,最小拍控制器是针对一种输入类型设计的,只对该种类型的输入的响应在有限个采样周期后系统的误差为零。当系统输入其它类型信号时,系统的输出响应在有限个采样周期后有较大的稳态误
差,或者是系统有不可以接受的超调。这就要求对每种输入,都得单独设计一种控制器,增加了人的工作量。
最小拍无纹波控制器应用于液压位置伺服系统,充分利用了DSP高速运算及采样控制理论的优点,可以实现系统的实时在线控制。试验结果表明,系统具有良好的动态品质、控制精度和稳态性能。从准确性而言,系统对单位阶跃输入,在整个系统响应时间内均无稳态误差,从快速性而言,按单位阶跃输入设计的最少拍系统,动态过程基本满足要求;从平稳性而言,系统进入稳态以后,在采样时刻或非采样时刻,不存在波纹。
五、总结
由于控制任务的需要,当所选择的采样周期比较大或对控制质量要求比较高时,必须从被控对象的特性出发,直接根据计算机控制理论来设计数字控制器。本文对数字控制器的直接设计做了分析和说明。首先介绍了数字控制领域的背景,接着对数字控制器的直接设计进行了详细介绍,主要从设计步骤和特点入手,其次对数字控制中非常重要的最小拍控制以及最小拍无纹波控制做了详细说明。从全文的理论分析以及应用现状看,最小拍系统具有对特定的参考输入信号,在到达稳态后,系统在采样点的输出值准确跟随输入信号,不存在静差;在各种使系统在有限拍内到达稳态的设计中,系统准确跟踪输入信号所需的采样周期数最少;数字控制器在物理上可以实现;闭环系统稳定等特点,所以其广泛应用于各个领域。并且可和其他的控制结合使用,达到不同的控制要求。而最小拍无纹波控制具有良好的动态品质、控制精度和稳态性能,将它应用于控制系统中,可达到控制的更高要求。这只是数字控制的两个例子,相信随着科学技术的发展,这些技术将会被不断更新和改进,更好的服务于我们的生活中。
六、参考文献
[1]全瑞琴,海玲;浅析基于数字控制器实现的最小拍控制系统;科技传播;2010?10
[2] 席爱民;计算机控制系统(第一版);北京:高等教育出版社,2004.161-183
[3] 周凯;最少拍数字化全闭环位置控制系统.组合机床与自动化加工技术;1998,12:
[4] 曹鹏举,许平勇,李晓峰等;基于DSP 的液压伺服系统最少拍无纹波控制;液压与气动;2008,1:33-35
[5]李萍;最小拍无波纹直流电机控制系统仿真研究;计算机工程与设计;2009,30(8)
[6]胡寿松;自动控制原理(第三版);北京:国防工业出版社,1994.367-377
[7]涂源钊;最少拍控制器的设计方法;四川联合大学学报(工程科学版);1997,1(4):67-72
[8]高国琴等;《微型计算机控制技术》;机械工业出版社;2006.8
数字集成电路设计_笔记归纳..
第三章、器件 一、超深亚微米工艺条件下MOS 管主要二阶效应: 1、速度饱和效应:主要出现在短沟道NMOS 管,PMOS 速度饱和效应不显著。主要原因是 TH G S V V -太大。在沟道电场强度不高时载流子速度正比于电场强度(μξν=) ,即载流子迁移率是常数。但在电场强度很高时载流子的速度将由于散射效应而趋于饱和,不再随电场 强度的增加而线性增加。此时近似表达式为:μξυ=(c ξξ<),c s a t μξυυ==(c ξξ≥) ,出现饱和速度时的漏源电压D SAT V 是一个常数。线性区的电流公式不变,但一旦达到DSAT V ,电流即可饱和,此时DS I 与GS V 成线性关系(不再是低压时的平方关系)。 2、Latch-up 效应:由于单阱工艺的NPNP 结构,可能会出现VDD 到VSS 的短路大电流。 正反馈机制:PNP 微正向导通,射集电流反馈入NPN 的基极,电流放大后又反馈到PNP 的基极,再次放大加剧导通。 克服的方法:1、减少阱/衬底的寄生电阻,从而减少馈入基极的电流,于是削弱了正反馈。 2、保护环。 3、短沟道效应:在沟道较长时,沟道耗尽区主要来自MOS 场效应,而当沟道较短时,漏衬结(反偏)、源衬结的耗尽区将不可忽略,即栅下的一部分区域已被耗尽,只需要一个较小的阈值电压就足以引起强反型。所以短沟时VT 随L 的减小而减小。 此外,提高漏源电压可以得到类似的效应,短沟时VT 随VDS 增加而减小,因为这增加了反偏漏衬结耗尽区的宽度。这一效应被称为漏端感应源端势垒降低。
4、漏端感应源端势垒降低(DIBL): VDS增加会使源端势垒下降,沟道长度缩短会使源端势垒下降。VDS很大时反偏漏衬结击穿,漏源穿通,将不受栅压控制。 5、亚阈值效应(弱反型导通):当电压低于阈值电压时MOS管已部分导通。不存在导电沟道时源(n+)体(p)漏(n+)三端实际上形成了一个寄生的双极性晶体管。一般希望该效应越小越好,尤其在依靠电荷在电容上存储的动态电路,因为其工作会受亚阈值漏电的严重影响。 绝缘体上硅(SOI) 6、沟长调制:长沟器件:沟道夹断饱和;短沟器件:载流子速度饱和。 7、热载流子效应:由于器件发展过程中,电压降低的幅度不及器件尺寸,导致电场强度提高,使得电子速度增加。漏端强电场一方面引起高能热电子与晶格碰撞产生电子空穴对,从而形成衬底电流,另一方面使电子隧穿到栅氧中,形成栅电流并改变阈值电压。 影响:1、使器件参数变差,引起长期的可靠性问题,可能导致器件失效。2、衬底电流会引入噪声、Latch-up、和动态节点漏电。 解决:LDD(轻掺杂漏):在漏源区和沟道间加一段电阻率较高的轻掺杂n-区。缺点是使器件跨导和IDS减小。 8、体效应:衬底偏置体效应、衬底电流感应体效应(衬底电流在衬底电阻上的压降造成衬偏电压)。 二、MOSFET器件模型 1、目的、意义:减少设计时间和制造成本。 2、要求:精确;有物理基础;可扩展性,能预测不同尺寸器件性能;高效率性,减少迭代次数和模拟时间 3、结构电阻:沟道等效电阻、寄生电阻 4、结构电容: 三、特征尺寸缩小 目的:1、尺寸更小;2、速度更快;3、功耗更低;4、成本更低、 方式: 1、恒场律(全比例缩小),理想模型,尺寸和电压按统一比例缩小。 优点:提高了集成密度 未改善:功率密度。 问题:1、电流密度增加;2、VTH小使得抗干扰能力差;3、电源电压标准改变带来不便;4、漏源耗尽层宽度不按比例缩小。 2、恒压律,目前最普遍,仅尺寸缩小,电压保持不变。 优点:1、电源电压不变;2、提高了集成密度 问题:1、电流密度、功率密度极大增加;2、功耗增加;3、沟道电场增加,将产生热载流子效应、速度饱和效应等负面效应;4、衬底浓度的增加使PN结寄生电容增加,速度下降。 3、一般化缩小,对今天最实用,尺寸和电压按不同比例缩小。 限制因素:长期使用的可靠性、载流子的极限速度、功耗。
温度控制器的设计与制作共13页
温度控制器的设计与制作 一、功能要求 设计并制作一个温度控制器,用于自动接通或断开室内的电加热设备,从而使室内温度达到设定温度要求,并能实时显示室内温度。当室内温度大于等于设定温度时,控制器断 ?时,控制器接通电加热设备。 开电加热设备;当室内温度比设定温度小2C 控温范围:0~51C? 控温精度:≤1C? 二、硬件系统设计 1.硬件系统由七部分组成,即单片机及看门狗电路、温度检测电路、控制输出电路、键盘电路、显示电路、设置温度储存电路及电源电路。 (1)单片机及看门狗电路 根据设计所需的单片机的内部资源(程序存储器的容量、数据存储器的容量及I/O口数量),选择AT89C51-24PC较合适。为了防止程序跑飞,导致温度失控,进而引起可怕的后果,本设计加入了硬件看门狗电路IMP813L,如果它的WDI脚不处于浮空状态,在1.6秒内WDI不被触发(即没有检测到上什沿或下降沿),就说明程序已经跑飞,看门狗输出端WDO将输出低电平到手动复位端,使复位输出端RST发出复位信号,使单片机可靠复位,即程序重新开始执行。(注:如果选用AT89S51,由于其内部已具有看门狗电路,就不需外加IMP813L) (2)温度检测电路 温度传感器采用AD590,它实际上是一个与绝对温度成正比的电流源,它的工作电压为4~30V,感测的温度范围为-550C~+1500C,具有良好的线性输出,其输出电流与温度成正比,即1μA/K。因此在00C时的输出电流为273.2μA,在1000C时输出电流为373.2μA。温度传感器将温度的变化转变为电流信号,通过电阻后转变电压信号,经过运算放大器JRC4558运算处理,处理后得到的模拟电压信号传输给A/D转换部分。A/D转换器选用ADC0804,它是用CMOS集成工艺制成的逐次逼近型模数转换芯片,分辨率8位,转换时间100μs,基准电压0~5V,输入模拟电压0~5V。 (3)控制输出电路 控制信号由单片机的P1.4引脚输出,经过光耦TLP521-1隔离后,经三极管C8550直接驱动继电器WJ108-1C-05VDC,如果所接的电加热设备的功率≤2KW,则可利用继电器的常开触点直接控制加热设备,如果加热设备的功率>2KW,可以继电器控制接触器,由接触器直接控制加热设备。 (4)键盘电路 键盘共有四个按键,分别是S1(设置)、S2(+)、S3(-)、S4(储存)。通过键盘来设置室内应达到的温度,键盘采用中断方式控制。 (5)显示电路 显示电路由两位E10501_AR数码管组成,由两片74LS164驱动,实现静态显示,74LS164所需的串行数据和时钟由单片机的P3.0和P3.1提供。对于学过“串行口”知识的班级,实习时,可以采用串行口工作于方式0,即同步移位寄存器的输出方式,通过串行口输出显示数据(实时温度值或设置温度值);对于没学过“串行口”知识的班级,实习时,可以采用模拟串行口的输出方式,实现显示数据的串行输出。 (6)设置温度存储电路 为了防止设定温度在电源断电后丢失,此设计加入了储存电路,储存器选用具有I2C总线功能的AT24C01或FM24C01均可。每次通过键盘设置的室内设定温度都通过储存器储存起来,即使是电源断电,储存器存储的设定温度也不丢失,在电源来电后,单片机自动将设
基于51单片机的数字频率计_毕业设计
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。 学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据 库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期:
计算机控制课程设计电阻炉温度控制系统
计算机控制课程设计 报告 设计题目:电阻炉温度控制系统设计 年级专业:09级测控技术与仪器 化工、机械、食品等领域。温度控制是工业生产过程中经常遇到的过程控制,有些工艺过程对其温度的控制效果直接影响着产品的质量。因而设计一种较为理想的温度控制系统是非常有价值的。本设计就是利用单片机来控制高温加热炉的温度,传统的以普通双向晶闸管(SCR)控制的高温电加热炉采用移相触发电路改变晶闸管导通角的大小来调节输出功率,达到自动控制电加热炉温度的目的。这种移相方式输出一种非正弦波,实践表明这种控制方式产
生相当大的中频干扰,并通过电网传输,给电力系统造成“公害”。采用固态继电器控温电路,通过单片机控制固态继电器,其波形为完整的正弦波,是一种稳定、可靠、较先进的控制方法。为了降低成本和保证较高的控温精度,采用普通的ADC0809芯片和具有零点迁移、冷端补偿功能的温度变送器桥路,使实际测温范围缩小。 1.1电阻炉组成及其加热方式 电阻炉是工业炉的一种,是利用电流通过电热体元件将电能转化为热能来加热或者熔化元件或物料的热加工设备。电阻炉由炉体、电气控制系统和辅助系统组成,炉体由炉壳、加热器、炉衬(包括隔热屏)等部件组成。由于炉子的种类不同,因而所使用的燃料和加
热方法也不同;由于工艺不同,所要求的温度高低不同,因而所采用的测温元件和测温方法也不同;产品工艺不同,对控温精度要求不同,因而控制系统的组成也不相同。电气控制系统包括主机与外围电路、仪表显示等。辅助系统通常指传动系统、真空系统、冷却系统等,因炉种的不同而各异。电阻炉的类型根据其热量产生的方式不同,可分为间接加热式和直接加热式两大类。间接加热式电阻炉,就是在炉子内部有专用的电阻材料制作的加热元件, (4)电阻炉温度按预定的规律变化,超调量应尽可能小,且具有良好的稳定性; (5)具有温度、曲线自动显示和打印功能,显示精度为±1℃; (6)具有报警、参数设定、温度曲线修改设置等功能。
温度控制器的设计
目录 第一章课程设计要求及电路说明 (3) 1.1课程设计要求与技术指标 (3) 1.2课程设计电路说明 (4) 第二章课程设计及结果分析 (6) 2.1课程设计思想 (6) 2.2课程设计问题及解决办法 (6) 2.3调试结果分析 (7) 第三章课程设计方案特点及体会 (8) 3.1 课程设计方案特点 (8) 3.2 课程设计心得体会 (9) 参考文献 (9) 附录 (9)
第一章课程设计要求及电路说明 1.1课程设计要求与技术指标 温度控制器的设计 设计要求与技术指标: 1、设计要求 (1)设计一个温度控制器电路; (2)根据性能指标,计算元件参数,选好元件,设计电路并画出电路图; (3)撰写设计报告。 2、技术指标 温度测量范围0—99℃,精度误差为0.1℃;LED数码管直读显示;温度报警指示灯。
1.2课程设计电路说明 1.2.1系统单元电路组成 温度计电路设计总体设计方框图如图1所示,控制器采用单片机AT89S51,温度传感器采用DS18B20,用3位LED数码管以串口传送数据实现温度显示。 1.2.2设计电路说明 主控制器:CPU是整个控制部分的核心,由STC89C52芯片连同附加电路构成的单片机最小系统作为数据处理及控制模块. 显示电路:显示电路采用4个共阳LED数码管,用于显示温度计的数值。报警电路:报警电路由蜂鸣器和三极管组成,当测量温度超过设计的温度时,该电路就会发出报警。 温度传感器:主要由DS18B20芯片组成,用于温度的采集。 时钟振荡:时钟振荡电路由晶振和电容组成,为STC89C52芯片提供稳定的时钟频率。
第二章课程设计及结果分析 2.1课程设计 2.1.1设计方案论证与比较 显示电路方案 方案一:采用数码管动态显示 使用一个七段LED数码管,采用动态显示的方法来显示各项指标,此方法价格成本低,而且自己也比较熟悉,实验室也常备有此元件。 方案二:采用LCD液晶显示 采用1602 LCD液晶显示,此方案显示内容相对丰富,且布线较为简单。 综合上述原因,采用方案一,使用数码管作为显示电路。 测温电路方案 方案一:采用模拟温度传感器测温 由于本设计是测温电路,可以使用热敏电阻之类的器件利用其感温效应,在将随被测温度变化的电压或电流采集过来,进行A/D转换后,就可以用单片机进行数据的处理,在显示电路上,就可以将被测温度显示出来,这种设计需要用到A/D转换电路,感温电路比较麻烦。 方案二:采用数字温度传感器 经过查询相关的资料,发现在单片机电路设计中,大多数都是使用传感器,所以可以采用一只温度传感器DS18B20,此传感器,可以很容易直接读取被测温度值,进行转换,就可以满足设计要求。 综合考虑,很容易看出,采用方案二,电路比较简单,软件设计也比较简单,故采用了方案二。 2.1.2设计总体方案 根据上述方案比较,结合题目要可以将系统分为主控模块,显示模块,温度采集模块和报警模块,其框图如下:
单片机课程设计(温度控制器)
基于单片机的温度控制器设计 内容摘要:该温度报警系统以AT89C51单片机为核心控制芯片,实现温度检测报警功能的方案。该系统能实时采集周围的温度信息,程序内部设定有报警上下限,根据应用环境不同可设定不同的报警上下限。该系统实现了对温度的自动监测和自动调温功能。 关键词:AT89C51ADC0808 温度检测报警自动调温 Abstract:The temperature alarm system AT89C51 control chip, realize temperature detection alarm function scheme. The system can collect real-time temperature information around that internal procedures set alarm equipped, according to different application environment can be set different alarm upper. The system realizes the automatic monitoring of temperature. The instrument can achieve the automatic thermostat function. Keywords:AT89C51 ADC0808Temperature detectingalarmautomatic thermostat 引言:本课题是基于单片机的温度控制器设计,经过对对相关书籍资料的查阅确定应用单片机为主控模块通过外围设备来实现对温度的控制。实现高低温报警、指示和低温自加热功能(加热功能未在仿真中体现)。 1.设计方案及原理 1.1设计任务 基于单片机设计温度检测报警,可以实时采集周围的温度信息进行显示,并且可以根据应用环境不同设定不同的报警上下限。 1.2设计要求 (1)实时温度检测。 (2)具有温度报警功能。 (3)可以设报警置温度上下限。 (4)低于下限时启动加热装置。 1.3总体设计方案及论证
温度控制器课程设计要点
郑州科技学院 《模拟电子技术》课程设计 题目温度控制器 学生姓名 专业班级 学号 院(系)信息工程学院 指导教师 完成时间 2015年12月31日
郑州科技学院 模拟电子技术课程设计任务书 专业 14级通信工程班级 2班学号姓名 一、设计题目温度控制器 二、设计任务与要求 1、当温度低于设定温度时,两个加热丝同时通电加热,指示灯发光; 2、当水温高于设定温度时,两根加热丝都不通电,指示灯熄灭; 3、根据上述要求选定设计方案,画出系统框图,并写出详细的设计过程; 4、利用Multisim软件画出一套完整的设计电路图,并列出所有的元件清单; 5、安装调试并按规定格式写出课程设计报告书. 三、参考文献 [1]吴友宇.模拟电子技术基础[M]. 清华大学出版社,2009.52~55. [2]孙梅生.电子技术基础课程设计[M]. 高等教育出版社,2005.25~28. [3]徐国华.电子技能实训教程[M]. 北京航空航天大学出版社,2006.13 ~15. [4]陈杰,黄鸿.传感器与检测技术[M].北京:高等教育出版社,2008.22~25. [5]翟玉文等.电子设计与实践[M].北京:北京中国电力出版社,2005.11~13. [6]万嘉若,林康运.电子线路基础[M]. 高等教育出版社,2006.27 ~29. 四、设计时间 2015 年12月21 日至2015 年12 月31 日 指导教师签名: 年月日
本设计是一种结构简单、性能稳定、使用方便、价格低廉、使用寿命长、具有一定的实用性等优点的温度控制电路。本文设计了一种温度控制器电路,该系统采用模拟技术进行温度的采集与控制。主要由电源模块,温度采集模块,继电器模块组成。 现代社会科学技术的发展可以说是突飞猛进,很多传统的东西都被成本更低、功能更多、使用更方便的电子产品所替代,本课程设计是一个以温度传感器采用LM35的环境温度简易测控系统,用于替代传统的低精度、不易读数的温度计。但系统预留了足够的扩展空间,并提供了简单的扩展方式供参考,实际使用中可根据需要改成多路转换,既可以增加湿度等测控对象,也能减少外界因素对系统的干扰。 首先温度传感器把温度信号转换为电流信号,通过放大器变成电压信号,然后送入两个反向输入的运算放大器组成的比较器电路,让电位器来改变温度范围的取值,最后信号送入比较器电路,通过比较来判断控制电路是否需要工作。此方案是采用传统的模拟控制方法,选用模拟电路,用电位器设定给定值,反馈的温度值与给定的温度值比较后,决定是否加热。 关键词:温度传感器比较器继电器
基于51单片机的数字频率计毕业论文
基于51单片机的数字频率计 目录 第1节引言 (2) 1.1数字频率计概述 (2) 1.2频率测量仪的设计思路与频率的计算 (2) 1.3基本设计原理 (3) 第2节数字频率计(低频)的硬件结构设计 (4) 2.1系统硬件的构成 (4) 2.2系统工作原理图 (4) 2.3AT89C51单片机及其引脚说明 (5) 2.4信号调理及放大整形模块 (7) 2.5时基信号产生电路 (7) 2.6显示模块 (8) 第3节软件设计 (12) 3.1 定时计数 (12) 3.2 量程转换 (12) 3.3 BCD转换 (12) 3.4 LCD显示 (12) 第4节结束语 (13) 参考文献 (14) 附录汇编源程序代码 (15)
基于51单片机的数字频率计 第1节引言 本应用系统设计的目的是通过在“单片机原理及应用”课堂上学习的知识,以及查阅资料,培养一种自学的能力。并且引导一种创新的思维,把学到的知识应用到日常生活当中。在设计的过程中,不断的学习,思考和同学间的相互讨论,运用科学的分析问题的方法解决遇到的困难,掌握单片机系统一般的开发流程,学会对常见问题的处理方法,积累设计系统的经验,充分发挥教学与实践的结合。全能提高个人系统开发的综合能力,开拓了思维,为今后能在相应工作岗位上的工作打下了坚实的基础。 1.1数字频率计概述 数字频率计是计算机、通讯设备、音频视频等科研生产领域不可缺少的测量仪器。它是一种用十进制数字显示被测信号频率的数字测量仪器。它的基本功能是测量正弦信号,方波信号及其他各种单位时间变化的物理量。在进行模拟、数字电路的设计、安装、调试过程中,由于其使用十进制数显示,测量迅速,精确度高,显示直观,经常要用到频率计。 本数字频率计将采用定时、计数的方法测量频率,采用一个1602A LCD显示器动态显示6位数。测量围从1Hz—10kHz的正弦波、方波、三角波,时基宽度为1us,10us,100us,1ms。用单片机实现自动测量功能。 基本设计原理是直接用十进制数字显示被测信号频率的一种测量装置。它以测量周期的方法对正弦波、方波、三角波的频率进行自动的测量。 1.2频率测量仪的设计思路与频率的计算 频率测量仪的设计思路主要是:对信号分频,测量一个或几个被测量信号周期中已知标准频率信号的周期个数,进而测量出该信号频率的大小,其原理如右图1所示。 1 图可知: T=NT o 为标准信号的周期,所以T为分频后信号的周期,则可以算出被测量信(注:T o
模电课设—温度控制系统设计
目录 1.原理电路的设计 (11) 1.1总体方案设计 (11) 1.1.1简单原理叙述 (11) 1.1.2设计方案选择 (11) 1.2单元电路的设计 (33) 1.2.1温度信号的采集与转化单元——温度传感器 (33) 1.2.2电压信号的处理单元——运算放大器 (44) 1.2.3电压表征温度单元 (55) 1.2.4电压控制单元——迟滞比较器 (66) 1.2.5驱动单元——继电器 (88) 1.2.6 制冷部分——Tec半导体制冷片 (99) 1.3完整电路图 (1010) 2.仿真结果分析 (1111) 3 实物展示 (1313) 3.1 实物焊接效果图 (1313) 3.2 实物性能测试数据 (1414) 3.2.1制冷测试 (1414) 3.2.2制热测试 (1818) 3.3.3性能测试数据分析 (2020) 4总结、收获与体会 (2121) 附录一元件清单 (2222) 附录二参考文献. (2323)
摘要 本课程设计以温度传感器LM35、运算放大器UA741、NE5532P及电压比较器LM339 N为电路系统的主要组成元件,扩展适当的接口电路,制作一个温度控制系统,通过室温的变化和改变设定的温度,来改变电压传感器上两个输入端电压的大小,通过三极管开关电路控制继电器的通断,来控制Tec制冷片的工作。这样循环往复执行这样一个周期性的动作,从而把温度控制在一定范围内。学会查询文献资料,撰写论文的方法,并提交课程设计报告和实验成品。 关键词:温度;测量;控制。
Abstract This course is designed to a temperature sensor LM35, an operational amplifier UA741,NE5532P and a voltage comparator LM339N circuit system of the main components. Extending the appropriate interface circuit, make a temperature control system. By changing the temperature changes and set the temperature to change the size of the two input ends of the voltage on the voltage sensor, an audion tube switch circuit to control the on-off relay to control Tec cooling piece work. This cycle of performing such a periodic motion, thus controlling the temperature in a certain range. Learn to query the literature, writing papers, and submitted to the curriculum design report and experimental products. Key words: temperature ; measure ;control
毕业设计数字频率计的设计论文
数字频率计的设计 摘要:本论文是一种直接用十进制数字来显示被测信号频率的测量装置。它不仅可以测量正弦波、方波、三角波的频率,而且还可以测量其它各种单位时间内变化的物理量的频率。该频率计是首先将被测信号变成脉冲信号,其重复频率等于被测频率。时钟电路提供标准的时间脉冲信号。闸门电路由标准秒信号进行控制,当闸门信号为高电平时,闸门开通,被测信号的脉冲通过闸门送入计数显示电路进行显示;当闸门信号为低电平时,闸门关断,计数器没有时钟脉冲输出,计数器停止计数。 关键词:频率显示闸门秒信号 引言 随着无线电技术的发展与普及,“频率”已成为广大群众所熟悉的物理量。调节收音机上的频率刻度盘可以使我们选听到自己所喜欢的电台节目;调节电视机上的微调旋钮可使电视机对准电视台的广播频率,获得图像清晰的收看效果,这些已成为人们的生活常识。 人们在日常生活、工作中更离不开计时。学校何时上、下课?工厂几时上、下班等这些都涉及到计时。频率、时间的应用,在当代高科技中显得尤为重要。例如,邮电通讯,大地测量,地震预报等等,都与频率、时间密切相关,只是其精密度和准确度比人们日常生活中的要求高得多罢了。 本次设计主要采用计数法制成一个测量范围在0~9999Hz的频率计。该频率计闸门信号的采样时间为1s,并采用4位数码管显示。它不仅可以测量正弦波、方波、三角波的频率,而且还可以测量其它各种单位时间内变化的物理量的频率。 一、数字频率计的组成 数字频率计电路主要由串联型稳压电源、整形电路、10分频电路、时钟电路、闸门形成及控制电路、计数显示电路等组成。
电路组成框图1-1如下: 待测信号整形电路10分频电路闸门形成及控制电路 串联型稳压电源时钟电路计数显示电路 电路组成框图1-1 二、设计所用集成电路简介 1.集成电路NE555概述 NE555是一种集模拟、数字于一体的中规模集成电路,它常应用于信号的产生与变化、电路的检测与控制。芯片采用双列直插式封装,有八个管脚。NE555引脚图2-1和功能如下 图2-1 引出端功能符号: TR: 置位控置制端,也称电平触发端 RD: 复位端,低电平有效 Q: 电路的输出端 CO: 电压控制端 TH: 复位控制端 DIS: 放电端 Vcc: 电源端 GND: 接地脚 2.集成电路CD4518概述 集成电路CD4518是一个双BCD码加法计数器。它有两个时钟输
武汉理工大学模电课设温度控制系统设计
课程设计任务书 学生姓名:张亚男专业班级:通信1104班 指导教师:李政颖 工作单位:信息工程学院 题目: 温度控制系统的设计 初始条件:TEC半导体制冷器、UA741 运算放大器、LM339N电压比较器、稳压管、LM35温度传感器、继电器 要求完成的主要任务: 一、设计任务:利用温度传感器件、集成运算放大器和Tec(Thermoelectric Cooler, 即半导体致冷器)等设计一个温度控制器。 二、设计要求:(1)控制密闭容器内空气温度 (2)控制容器容积>5cm*5cm*5cm (3)测温和控温范围0℃~室温 (4)控温精度±1℃ 三、发挥部分:测温和控温范围:0℃~(室温+10℃) 时间安排:19周准备课设所需资料,弄清各元件的原理并设计电路。 20周在仿真软件multisim上画出电路图并进行仿真。 21周周五前进行电路的焊接与调试,周五答辩。 指导教师签名:年月日 系主任(或责任教师)签名:年月日
温度控制系统的设计 1.温度控制系统原理电路的设计 (3) 1.1 温度控制系统工作原理总述 (3) 1.2 方案设计 (3) 2.单元电路设计 (4) 2.1 温度信号的采集与转化单元——温度传感器 (4) 2.2 电压信号的处理单元——运算放大器 (5) 2.3 电压值表征温度单元——万用表 (7) 2.4 电压控制单元——迟滞比较器 (8) 2.5 驱动单元——继电器 (10) 2.6 TEC装置 (11) 2.7 整体电路图 (12) 3.电路仿真 (12) 3.1 multisim仿真 (12) 3.2 仿真分析 (14) 4.实物焊接 (15) 5.总结及体会 (16) 6.元件清单 (18) 7.参考文献 (19)
温度控制系统毕业设计
摘要 在日常生活及工农业生产中,对温度的检测及控制时常显得极其重要。因此,对数字显示温度计的设计有着实际意义和广泛的应用。本文介绍一种利用单片机实现对温度只能控制及显示方案。本毕业设计主要研究的是对高精度的数字温度计的设计,继而实现对对象的测温。测温系数主要包括供电电源,数字温度传感器的数据采集电路,LED显示电路,蜂鸣报警电路,继电器控制,按键电路,单片机主板电路。高精度数字温度计的测温过程,由数字温度传感器采集所测对象的温度,并将温度传输到单片机,最终由液晶显示器显示温度值。该数字温度计测温范围在-55℃~+125℃,精度误差在±0.5℃以内,然后通过LED数码管直接显示出温度值。数字温度计完全可代替传统的水银温度计,可以在家庭以及工业中都可以应用,实用价值很高。 关键词:单片机:ds18b20:LED显示:数字温度. Abstract In our daily life and industrial and agricultural production, the detection and control of the temperature, the digital thermometer has practical significance and a wide range of applications .This article describes a programmer which use a microcontroller to achieve and display the right temperature by intelligent control .This programmer mainly consists by temperature control sensors, MCU, LED display modules circuit. The main aim of this thesis is to design high-precision digital thermometer and then realize the object temperature measurement. Temperature measurement system includes power supply, data acquisition circuit, buzzer alarm circuit, keypad circuit, board with a microcontroller circuit is the key to the whole system. The temperature process of high-precision digital thermometer, from collecting the temperature of the object by the digital temperature sensor and the temperature transmit ted to the microcontroller, and ultimately display temperature by the LED. The digital thermometer requires the high degree is positive 125and the low degree is negative 55, the error is less than 0.5, LED can read the number. This digital thermometer could
数字频率计设计 毕业设计
毕业设计(论文)任务书 课题名称数字频率设计课题性质毕业论文 专业楼宇智能化工程技术班级 11级学生姓名学号 113121 指导教师教研室主任系部主任 发放日期 一、课题条件: 1.分析频率计的设计方法; 2.利用现有的仿真软件进行波形仿真; 二、毕业论文(设计)主要内容: 1、测量信号:方波; 2、测量频率范围:1KHZ~9999HZ;10KHZ~100KHZ; 3、显示方式:4位十进制数显示; 4、时基电路由555定时器及分频器组成,555振荡器产生脉冲信号,经分频器分频产生的时基信号,其脉冲宽度分别为:1秒,0.1秒; 5、当被测信号的频率超出测量范围时,报警。 三、计划进度: 1. 资料的收集撰写开题报告 7月18日至9月8日 2. 方案设计 9月9日至9月15日 3. 电路的设计指标分析与确定;后期的电路优化元器件的选择与参数确定 9月16日至11月2日 4. 毕业设计论文的修改、完善 11月3日至11月10日 5. 毕业设计答辩11月15 日至11月20日 6. 毕业设计工作总结11月20日至11月25日 四、主要参考文献: (1)电子技术基础(第三版) (2)电子产品的设计与制作工艺 (3)电子设计技术杂志 (4)现代电子学及应用1 (5)AD (6)数字电子技术基础阎石主编高等教育出版社 指导教师(系)教研室主任 年月日年月日
摘要 频率计又称为频率计数器,是一种专门对被测信号频率进行测量的电子测量仪器。其最基本的工作原理为:当被测信号在特定时间段T内的周期个数为N 时,则被测信号的频率f=N/T。 频率计主要由四个部分构成:时基(T)电路、输入电路、计数显示电路以及控制电路。在一个测量周期过程中,被测周期信号在输入电路中经过放大、整形、微分操作之后形成特定周期的窄脉冲,送到主门的一个输入端。主门的另外一个输入端为时基电路产生电路产生的闸门脉冲。在闸门脉冲开启主门的期间,特定周期的窄脉冲才能通过主门,从而进入计数器进行计数,计数器的显示电路则用来显示被测信号的频率值,内部控制电路则用来完成各种测量功能之间的切换并实现测量设置。 在传统的电子测量仪器中,示波器在进行频率测量时测量精度较低,误差较大。频谱仪可以准确的测量频率并显示被测信号的频谱,但测量速度较慢,无法实时快速的跟踪捕捉到被测信号频率的变化。正是由于频率计能够快速准确的捕捉到被测信号频率的变化,因此,频率计拥有非常广泛的应用范围。 在传统的生产制造企业中,频率计被广泛的应用在产线的生产测试中。频率计能够快速的捕捉到晶体振荡器输出频率的变化,用户通过使用频率计能够迅速的发现有故障的晶振产品,确保产品质量。 在计量实验室中,频率计被用来对各种电子测量设备的本地振荡器进行校准。在无线通讯测试中,频率计既可以被用来对无线通讯基站的主时钟进行校准,还可以被用来对无线电台的跳频信号和频率调制信号进行分析。 常用的频率测量方法有测频法、测周法、测周期/频率法、F/V与A/D法。本文阐述了用测频法构成的数字频率计。 关键词:逻辑控制,计数器,时基(T)电路、输入电路、计数显示电路以及控制电路。
热交换器温度控制系统课程设计报告书
热交换器温度控制系统 一.控制系统组成 由换热器出口温度控制系统流程图1可以看出系统包括换热器、热水炉、控制冷流体的多级离心泵,变频器、涡轮流量传感器、温度传感器等设备。 图1换热器出口温度控制系统流程图 控制过程特点:换热器温度控制系统是由温度变送器、调节器、执行器和被控对象(出口温度)组成闭合回路。被调参数(换热器出口温度)经检验元件测量并由温度变送器转换处理获得测量信号c,测量值c与给定值r的差值e送入调节器,调节器对偏差信号e进行运算处理后输出控制作用u。 二、设计控制系统选取方案 根据控制系统的复杂程度,可以将其分为简单控制系统和复杂控制系统。其中在换热器上常用的复杂控制系统又包括串级控制系统和前馈控制系统。对于控制系统的选取,应当根据具体的控制对象、控制要求,经济指标等诸多因素,选用合适的控制系统。以下是通过对换热器过程控制系统的分析,确定合适的控制系统。
换热器的温度控制系统工艺流程图如图2所示,冷流体和热流体分别通过换热器的壳程和管程,通过热传导,从而使热流体的出口温度降低。热流体加热炉加热到某温度,通过循环泵流经换热器的管程,出口温度稳定在设定值附近。冷流体通过多级离心泵流经换热器的壳程,与热流体交换热后流回蓄电池,循环使用。在换热器的冷热流体进口处均设置一个调节阀,可以调节冷热流体的大小。在冷流体出口设置一个电功调节阀,可以根据输入信号自动调节冷流体流量的大小。多级离心泵的转速由便频器来控制。 换热器过程控制系统执行器的选择考虑到电动调节阀控制具有传递滞后大,反应迟缓等缺点,根具离心泵模型得到通过控制离心泵转速调节流量具有反应灵敏,滞后小等特点,而离心泵转速是通过变频器调节的,因此,本系统中采用变频器作为执行器。 图2换热器的温度控制系统工艺流程图 引起换热器出口温度变化的扰动因素有很多,简要概括起来主要有: (1)热流体的流量和温度的扰动,热流体的流量主要受到换热器入口阀门的开度和循环泵压头的影响。热流体的温度主要受到加热炉加热温度和管路散热的影响。 (2 )冷流体的流量和温度的扰动。冷流体的流量主要受到离心泵的压头、转速
基于FPGA的数字频率计设计毕业论文
武汉轻工大学 毕业设计外文参考文献译文本 2013届 原文出处:from Vin Skahill.VHDL for Programmable Logic page 76-88 毕业设计题目:基于FPGA的数字频率计设计 院(系):电气与电子工程学院 专业名称:电子信息科学与技术 学生姓名: 学生学号: 指导教师:
Introduction of digital frequency meter Digital Frequency is an indispensable instrument of communications equipment, audio and video, and other areas of scientific research and production . In addition to the plastic part of the measured signal, and digital key for a part of the show, all the digital frequency using Verilog HDL designed and implemented achieve in an FPGA chip. The entire system is very lean, flexible and have a modification of the scene. 1 、And other precision measuring frequency Principle Frequency measurement methods can be divided into two kinds: (1) direct measurement method, that is, at a certain time measurement gate measured pulse signal number. (2) indirect measurements, such as the cycle frequency measurement, VF conversion law. Frequency Measurement indirect measurement method applies only to low-frequency signals. Based on the principles of traditional frequency measurement of the frequency of measurement accuracy will be measured with the decline in signal frequency decreases in the more practical limitations, such as the accuracy and frequency of measurement not only has high accuracy, but also in the whole frequency region to maintain constant test accuracy. The main method of measurement frequency measurement Preferences gated signal GATE issued by the MCU, GATE time width on the frequency measurement accuracy of less impact, in the larger context of choice, as long as the FPGA in 32 of 100 in the counter b M Signals are not overflow line, in accordance with the theoretical calculation GATE time can be greater than the width Tc 42.94 s, but due to the single-chip microcomputer data processing capacity constraints, the actual width of less time, generally in the range of between 0.1 s choice, that is, high-frequency, shorter gate;, low gate longer. This time gate width Tc based on the size of the measured frequency automatically adjust frequency measurement in order to achieve the automatic conversion range, and expanded the range of frequency measurement; realization of the entire scope of measurement accuracy, reduce the low-frequency measurement error. The design of the main methods of measuring the frequency measurement and control block diagram as shown in Figure 1. Figure 1 Preferences gated signal GA TE issued by the MCU, GA TE time width of less frequency measurement accuracy, in the larger context of choice, as long as the FPGA in 32 of 100 in the counter b M