单相电机调速原理
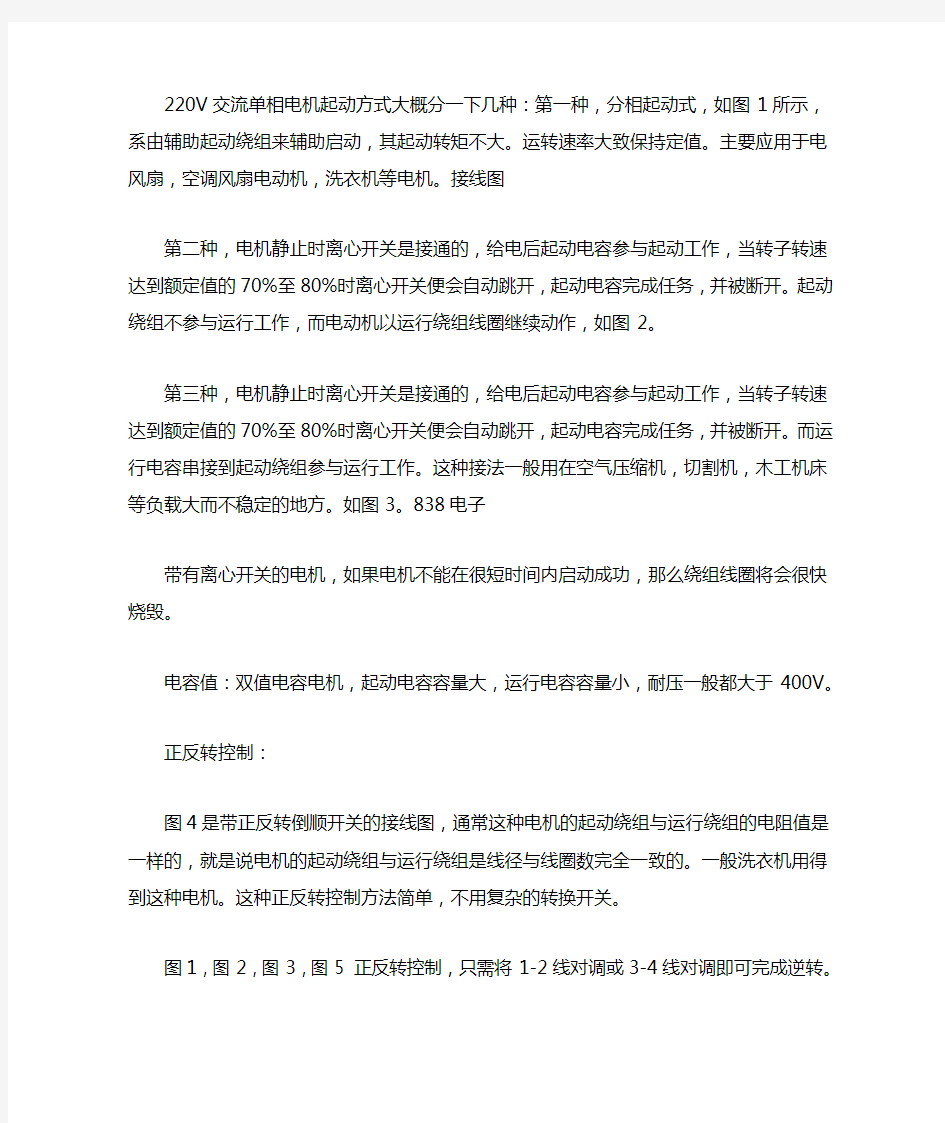
220V交流单相电机起动方式大概分一下几种:第一种,分相起动式,如图1所示,系由辅助起动绕组来辅助启动,其起动转矩不大。运转速率大致保持定值。主要应用于电风扇,空调风扇电动机,洗衣机等电机。接线图
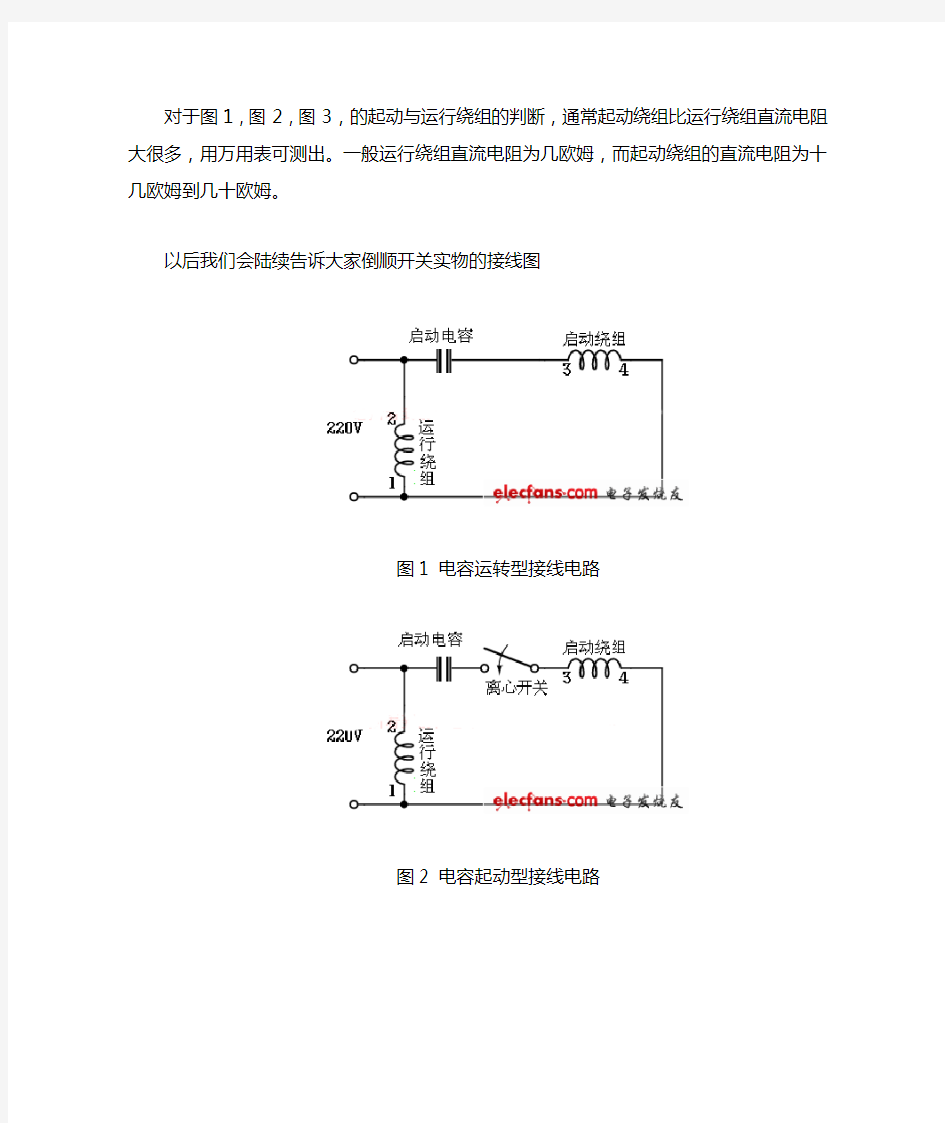
第二种,电机静止时离心开关是接通的,给电后起动电容参与起动工作,当转子转速达到额定值的70%至80%时离心开关便会自动跳开,起动电容完成任务,并被断开。起动绕组不参与运行工作,而电动机以运行绕组线圈继续动作,如图2。
第三种,电机静止时离心开关是接通的,给电后起动电容参与起动工作,当转子转速达到额定值的70%至80%时离心开关便会自动跳开,起动电容完成任务,并被断开。而运行电容串接到起动绕组参与运行工作。这种接法一般用在空气压缩机,切割机,木工机床等负载大而不稳定的地方。如图3。838电子
带有离心开关的电机,如果电机不能在很短时间内启动成功,那么绕组线圈将会很快烧毁。
电容值:双值电容电机,起动电容容量大,运行电容容量小,耐压一般都大于400V。
正反转控制:
图4是带正反转倒顺开关的接线图,通常这种电机的起动绕组与运行绕组的电阻值是一样的,就是说电机的起动绕组与运行绕组是线径与线圈数完全一致的。一般洗衣机用得到这种电机。这种正反转控制方法简单,不用复杂的转换开关。
图1,图2,图3,图5 正反转控制,只需将1-2线对调或3-4线对调即可完成逆转。
对于图1,图2,图3,的起动与运行绕组的判断,通常起动绕组比运行绕组直流电阻大很多,用万用表可测出。一般运行绕组直流电阻为几欧姆,而起动绕组的直流电阻为十几欧姆到几十欧姆。
以后我们会陆续告诉大家倒顺开关实物的接线图
图1 电容运转型接线电路
图2 电容起动型接线电路
图3 电容启动运转型接线电路(双值电容器)
图4 开关控制正反转接线
图5 双值电容异步电动机倒顺接线图
图6是实际的开关与电机连接图,这个倒顺开关如应用在三相电动机不需任何改动,如做单相电机换向用则稍做改动,红色,兰色线接入电源,黑色线是起动绕组线圈引出线,白色线运行绕组线圈引出线,左面一根灰色线是后接入的跨接线,正反转倒换就是靠开关自带的交叉连片来换向的,这种开关不足之处就是开关关闭后仍有一根线没有关闭,因此在安全上没有一定保障。
图为双值电容器
直流电机PWM调速电路
直流电机P W M调速电 路 Document serial number【KK89K-LLS98YT-SS8CB-SSUT-SST108】
《电子技术》课程设计报告 课题:直流电机PWM调速电路 班级电气工程1101学号1101205304 学生姓名xxx 专业电气信息类 系别电子与电气工程学院 指导老师电子技术课程设计指导小组 xxxxx 电子与电气工程学院 2012年5月 一、设计目的 a)培养理论联系实际的正确设计思想,训练综合运用已经学过的理论和生产实际知识去分析和解决工程实际问题的能力。 b)学习较复杂的电子系统设计的一般方法,了解和掌握模拟、数字电路等知识解决电子信息方面常见实际问题的能力,由学生自行设计、自行制作和自行调试。 c)进行基本技术技能训练,如基本仪器仪表的使用,常用元器件的识别、测量、熟练运用的能力,掌握设计资料、手册、标准和规范以及使用仿真软件、实验设备进行调试和数据处理等。 d)培养学生的创新能力。 二、设计任务与要求 1.设计电机驱动主回路,实现直流电机的正反向驱动; 2.设计PWM驱动信号发生电路; 3.设计电机转速显示电路; 4.设计电机转速调节电路;可以按键或电位器调节电机转速; 5.安装调试; 6.撰写设计报告。 三、设计思想及设计原理
1.信号可以采用数字方法给定,也可以采用电位器给定。建议采用数字方法。 2.PWM信号可以采用三角波发生器和比较器产生,也可采用数字电路及可编程器件产生。建议采用数字方法。 3.正反转主回路可以采用双极型器件实现,也可以用MOS器件实现; 4.转速测量电路可以采用增量型光电编码器,也可采用自行制作的光电编码电路、霍尔传感器以及其它近似测速方法。建议采用光电编码器。 5.显用数字方法显示电机转速。采用光电编码等方法的脉冲测速方法时,可采用计数法测量电机转速;电机转速信号为模拟信号时,可采用数字表头显示转速。建议采用数字方法。 6.(提高部分)可以采用反馈控制技术对系统进一步完善。 四、单元电路设计 4.1LM324组成的PWM直流电机产生电路 4.1.1它主要由U1(LM324)和Q1组成 图4.1中,由U1a、U1d组成振荡器电路,提供频率约为400Hz的方波/三角形波。U1c产生6V的参考电压作为振荡器电路的虚拟地。这是为了振荡器电路能在单电源情况下也能工作而不需要用正负双电源。U1b这里接成比较器的形式,它的反相输入端(6脚)接入电阻R6、R7和VR1,用来提供比较器的参考电压。这个电压与U1d的输出端(14脚)的三角形波电压进行比较。当该波形电压高于U1b的6脚电压.U1b的7脚输出为高电平;反之,当该波形电压低于U1b的6脚电压,U1b的7脚输出为低电平。由此我们可知,改变U1b的6脚电位使其与输入三角形波电压进行比较。就可增加或减小输出方波的宽度,实现脉宽调制(PWM)。电阻R6、R7用于控制VR1的结束点,保证在调节VR1时可以实现输出为全开(全速或全亮)或全关(停转或全灭),其实际的阻值可能会根据实际电路不同有所改变。 图4.1中,Q1为N沟道场效应管,这里用作功率开关管(电流放大),来驱动负载部分。前面电路提供的不同宽度的方波信号通过栅极(G)来控制Q1的通断。LED1的亮度变化可以用来指示电路输出的脉冲宽度。C3可以改善电路输出波形和减轻电路的射频干扰(RFI)。D1是用来防止电机的反电动势损坏Q1。 当使用24v的电源电压时,图1电路通过U2将24V转换成12V供控制电路使用。而Q1可以直接在21v电源上,对于Q1来讲这与接在12v电源上没有什么区别。参考图1,改变J1、J2的接法可使电路工作在不同电源电压(12V或24V)下。当通过Q1的电流不超过1A时,Q1可不用散热器。但如果Q1工作时电流超过1A时,需加装散热器。如果需要更大的电流(大于3A),可采用IRFZ34N等替换Q1。 图4.1LM324组成的PWM直流电机产生原理图 4.1.2工作原理 脉冲宽度调制(PWM)是英文“PulseWidthModulation”的缩写,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。
(完整版)《单相电机》习题库一.doc
《单相电机》习题库一 一、填空题 1. 单相异步电动机按启方式的不同可分五类:、、 、和。 2. 单相异步电动机启动绕组和主绕组上的电流在相位上相差度。 3. 吊扇的工作绕组直流电阻较(填大或小),起动绕组电阻较(填大或小 ) 。 4. 家用台扇电动机采用抽头调速,一个电机引出线 5 根,分是、 、、和。 5. 给单相异步电动机加额定电压时,而离心开关没有闭合,电动机( 能够起动、不能起动 ) 。 6.所谓脉动磁场,是指它的和按正弦规律变化, 而轴线的。 7.定子铁心仅嵌有一个绕组(也未设短路铜环)的单相异步电动电动机,其 方向是不固定的,当朝某个方向施加一个外力后转子沿着的方向转动起来。 8.为解决单相异步电动机的启动问题,通常单相异步电动机定子上安装两套绕 组,一套是,又称主绕组,另一套是,又称副绕组,它们的空 间位置相差电角度。 9. 单相双值电容异步电动机中的两只电容是、,其中电容容量较大,两只电容分别联后与启动绕组联。 10. 单相异步电动机的起动开关主要是、、三种。 11.凸极式单相罩极异步电动机定子铁心通常用__________________叠成,每极在 ____________处开个小槽,在小部分极上套有 ____________。这样,当励磁绕组通入时,磁极之间形成一个磁场而使电动机获得启动转矩。 二、判断题(对的打“√” ,错的打“×” ) 1. 单相异步电动机,在没副绕组的情况下也能产生旋转磁场。() 2. 单相异步电动机只要调换两根电源线就能改变转向。() 3. 单相异步电动机工作绕组直流电阻小,起动绕组直流电阻大。()
4.单相异步电动机上电容的作用是平稳电压。 5.离心开关作用是当电动机达到额定转速时,切断电容所在的支路。( ( ) ) 6.家用吊扇的电容器损坏拆除后,每次启动拨动一下,照样可以转动起来。 ()7.单相罩极式异步电动机具有结构简单、制造方便等优点,所以洗衣机上也被 采用。()8.给在空间互差 90°电角度的两相绕组内通入同相位交流电,就可产生旋转磁 场。()9.单相电容运行式异步电动机,因其主绕组与副绕组中的电流是同相位的,所 以称单相异步电机。 10.要改变罩极式异步电动机的转向,只要改变电源接线即可。()() 三、选择题(每题只有一个正确答案) 1.电动机铭牌上功率是指( ) 。 A.输入功率 B .输出的机械功率 C .损耗的功率D.输入与输出功率2.家用台扇最常用的调速方法是() A.抽头调速 B .电抗器调速 C.晶闸管调带 D.自耦变压器调速 3.电容如果串入单相异步电动机工作绕组中会发生现象是() A.电动机反转 B.电动机立即烧掉 C.电动机正常运行 D.电动机转向不变,但转速增大 4.单相异步电动机中电容器容量变小,会使电动机()。 A.转速变慢B.烧毁电动机C.没有任何影响 5.用万用表电阻挡电容器好坏时,发现万用表指针指到零欧不动,说明 ()。 A.电容器是好的B.断路C.短路 6.单相交流电通入单相绕组产生的磁场是()。 A.旋转磁场B、恒定磁场C.脉动磁场 7.单相罩极异步电动机的转动方向()。 A.总是由磁极的未罩部分转向被罩部分 B.总是由磁极的被罩部分转向未罩 C.决定于定子绕组首、尾端的接线关系
直流电机调速电路的设计
课程设计说明书 直流电机调速电路的设计 系、部: 学生姓名: 指导教师: 专业: 班级: 完成时间: 摘要
将电子技术和控制技术引入传统的电力技术领域,利用半导体开关器件组成各种电力变换电路实现电能的变换和控制,构成了一门完整的学科,被国际电工委员会命名为电力电子学或称为电力电子技术,他是一门综合了电子技术,控制技术和电力技术的新兴交叉学科。直流电机是电机的主要类型之一。一台直流电机即可作为发电机使用,也可作为电动机使用,用作直流发电机可以得到直流电源,而作为直流电动机,由于其具有良好的调速性能,在许多调速性能要求较高的场合,仍得到广泛使用。直流电动机是人类最早发明和应用的有一种电机。直流电动机是将直流电转换为的旋转机械。他与交流电动机相比,虽然直流电动机因为结构复杂,维护困难,价格比较贵等缺点制约了它的发展,应用不如交流电动机广泛。但由于直流电动机有优良的启动,调速和制动性能,因此在工业领域中仍占有一席之地。 关键词电力电子技术;直流电动机;机械能 ABSTRACT
Will the electronic technology and control technology into the traditional power technology, using semiconductor switching parts of all kinds of power transformation of electric power circuit implementation transformation and control, constitute a complete discipline, be door to the international electrotechnical commission named power electronics or called power electronic technology, he is a comprehensive electronic technology, control technology and the emerging interdisciplinary power technology. Dc motor is one of the main types of the motor. A dc motor as a generator can use, also can use as a motor, used as dc generators can get dc power, and as a dc motor, since it has good performance of speed adjustment, in many speed performa, is still widely used. Dc motor is the earliest human invention and application of a kind of motor. Current motor is converted to dc of rotating machine. He compared with ac motor, although dc motor for the complex structure, maintenance difficulties, price is more expensive shortcomings constrains its development, the application as ac motor widely. But because of dc motor with fine start, speed and braking performance, so in industry still has a place. Key words power electronic technology; dc motor; mechanical energy 目录
电机调速中的控制技术
电机调速中的控制技术 交流传动系统中的交流电动机是一个多变量、非线性、强耦合、时变的被控对象, 随着交流电动机调速理论的突破和调速装置性能的完善, 电动机的调速从直流发电机-电动机组调速、晶闸管可控整流器直流调压调速逐步发展到交流电动机变频调速, 变频调速又由WVF控制的PWM频调速发展到矢量控制、直接转矩控制变频调速。现代控制理论中的控制方法, 实现方法简便, 在电机调速领域中, 具有更广阔的应用前景。由目前国内外的研究成果可以看出, 电机传动的控制逐步向多元化、智能化和多种方法综合运用的方向发展。 一、矢量控制技术 VVV F空制是从电动机稳态方程出发研究其控制特性,动态控制效果很不理想。20 世纪70 年代初德国工程师F.Blaschke 首 先提出用矢量变换的方法来研究交流电动机的动态控制过程, 不但要控制各变量的幅值, 同时还要控制其相位, 以实现交流电动机磁通和转矩的解耦, 促使了高性能交流传动系统逐步走向实用化, 目前高动态性能的矢量控制变频器已经成功地应用在轧机主传动、电力机车牵引系统和数控机床中。这种理论的主要思想是将异步电动机模拟成直流机, 通过坐标变换的方法, 分别控制励磁电流分量与转矩电流分量, 从而获得与直流电动机一样良好的动态调速特性[1] 。这种控制方法现已较成熟, 产品质量较稳定。
这种方法采用了坐标变换, 所以对控制器的运算速度、处理能力等性能要求较高。近年来,围绕着矢量变换控制的缺陷, 如系统结构复杂、非线性和电机参数变化影响系统性能等等问题, 国内、外学者也进行了大量的研究。 二、直接转矩控制技术 1985年,德国的Depenbrock 教授提出了异步电动机直接转矩控制方法, 解决了系统复杂性和控制精度之间的矛盾。直接转矩控制系统不需要坐标变换,也不需要依赖转子数学模型, 理论上非常诱人。实验室条件下也已做出性能指标相当高的样机。只是还有些问题未解决, 如低速时转矩观测器和转速波动等, 未能产品化。现在市面上自称实现了转矩直接控制的系统, 大多都是或者采用了将磁链定向与直接转矩控制相结合的方法, 低速时采用磁链定向矢量变换控制, 高速时采用直接转矩控制。或者同时观测转子磁链, 作为直接转矩控制系统的校正。 直接转矩无差拍控制是基于离散化直接转矩控制系统提出来的一种控制方法。无差拍控制可以在一个控制周期内, 完全消除定子磁链模值和电磁转矩的动、静态误差, 消除由于使用滞环比较器产生的转矩脉动,使电机可以运行在极低速下, 扩大了调速范围。 转矩(磁链)跟踪预测控制方法认为磁链模值已经被准确控 制或只发生缓慢地变化, 没有考虑磁链模值的控制问题。对磁链和转矩都进行了预测跟踪控制, 控制效果明显优于单纯的转矩跟
单相异步电动机的工作原理
单相鼠笼式异步电动机的工作原理 单相鼠笼式异步动机由单相电源供电,它直接接到220伏单相交流电源上就能工作,但要采取一定的措施,否则启动不起来。我们日常生活用的一些家用电器,如空调器、电冰箱、洗衣机、电扇等广泛应用着单相异步电动机。 单相异步电动机的工作原理 当给三相异步电动机的定子三相绕组通入三相交流电时,会形成一个旋转磁场,在旋转磁场的作用下,转子将获得启动转矩而自行启动。当三相异步电动机通入单相交流电时就不能产生旋转磁场。 下面来分析单相异步电动机定子绕组通入单相交流电时产生的磁场情况。如下图所示为一台简单的单相异步电动机原理图,定子铁心上布置有单相定子绕组,转子为鼠笼结构。 交流电流波形
电流正半周产生的磁场 电流负半周产生的磁场 当向单相异步电动机的定子绕组中通入单相交流电后,由上图可见,当电流在正半周及负半周不断交变时,其产生的磁场大小及方向也在不断变化(按正弦规律变化),但磁场的轴线则沿纵轴方向固定不动,这样的磁场称为脉动磁场。 当转子静止不动时转子导体的合成感应电动势和电流为0,合成转矩为0,因此转子没有启动转矩。故单相异步电动机如果不采取一定的措施,单相异步电动机不能自行启动,如果用一个外力使转子转动一下,则转子能沿该方向继续转动下去。 单相异步电动机根据其启动方法或运行方法的不同,可分为单相电容运行电动机;单相电容启动电动机;单相罩极式电动机等。下面分别介绍。单相异步电动机容量一般较小,运行性能较差。 t 45 90 135 180 225 270 360 315
图1 单相电容运行异步电动机原理图 (a)接线图 (b)电流相量图 图1是单相电容运行异步电动机工作原理图。单相电容式异步电动机的定子铁芯上嵌放两套绕组:主绕组U1—U2(主绕组又称工作绕组)和副绕组Z1—Z2(副绕组又称启动绕组)。两套绕组在空间的位置上互差90度电角度。在启动绕Z1—Z2中串入一个电容器C后再与工作绕组并联,然后接到单相电源上。设流过启动绕组Z1-Z2的电流为iz,流过工作绕组U1—U2的电流以为iu,当接上电源后,由于电容的充放电作用,iz落后于iu90度,流过两套绕组的电流iz与iu在相位上相差90度,如图2所示。 设电动机两个绕组接上交流电源后,电流为正值时,电流从绕组的头端进去尾端出来;电流为负值时,电流从绕组的尾端进去头端出来。 从图2可看到:在t=0瞬间,iz=0,绕组Z1—Z2中无电流流过;而这瞬时iu为负的最大值,绕组U1—U2中电流由U2进Ul出。用右手定则可判断,此时电动机中会产生如图2所示磁场,其合成磁场方向向下。 从图2可看到:在ωt=π/2瞬间,iu=0,绕组U1—U2中无电流流过;这瞬间iz为正的最大值,绕组Z1-Z2中电流从Z1进Z2出。此时电动机内磁场分布如图2所示,其合成磁场方向较t=0时刻顺时针方向旋转了90角度。
常用单相电动机种类及特性
常用单相电动机种类及特性 在家用电器设备中,常配有小型单相交流感应电动机。交流感应电动机因应用类别的差异,一般可分为分相式电动机、电容启动式电动机、永久分相式电容电动机、罩极式电动机、永磁直流电动机及交直流电动机等类型。 一般的三相交流感应电动机在接通三相交流电后,电机定子绕组通过交变电流后产生旋转磁场并感应转子,从而使转子产生电动势,并相互作用而形成转矩,使转子转动。但单相交流感应电动机,只能产生极性和强度交替变化的磁场,不能产生旋转磁场,因此单相交流电动机必须另外设计使它产生旋转磁场,转子才能转动,所以常见单相交流电机有分相启动式、罩极式、电容启动式等种类。 1.分相启动式电动机 分相式电动机广泛应用于电冰箱、洗衣机、空调等家用电器中。该电机有一个鼠笼式转子和主、副两个定子绕组。两个绕组相差一个很大的相位角,使副绕组中的电流和磁通达到最大值的时间比主绕组早一些,因而能产生一个环绕定子旋转的磁通。这个旋转磁通切割转子上的导体,使转子导体感应一个较大的电流,电流所产生的磁通与定子磁通相互作用,转子便产生启动转矩。当电机一旦启动,转速上升至额定转速70%时,离心开关脱开副绕组即断电,电机即可正常运转。 2.罩极式电动机 罩极式单相交流电动机,它的结构简单,其电气性能略差于其他单相电机,但由于制作成本低,运行噪声较小,对电器设备干扰小,所以被广泛应用在电风扇、电吹风、吸尘器等小型家用电器中。罩极式电动机只有主绕组,没有副绕组(启动绕组),它在电机定子的两极处各设有一副短路环,也称为电极罩极圈。当电动机通电后,主磁极部分的磁场产生的脉动磁场感应短路而产生二次电流,从而使磁极上被罩部分的磁场,比未罩住部分的磁场滞后些,因而磁极构成旋转磁场,电动机转子便旋转启动工作。罩极式单相电动机还有一个特点,即可以很方便地转换成二极或四极转速,以适应不同转速电器配套使用。 3.电容式启动电动机 该类电动机可分为电容分相启动电机和永久分相电容电机。这种电机结构简单、启动快速、转速稳定,被广泛应用在电风扇、排风扇、抽油烟机等家用电器中。电容分相式电动机在定子绕组上设有主绕组和副绕组(启动绕组),并在启动绕组中串联大容量启动电容器,使通电后主、副绕组的电相角成90°,从而能产生较大的启动转矩,使转子启动运转。 对于永久分相电容电动机来说,其串接的电容器,当电机在通电启动或者正常运行时,均与启动绕组串接。由于永久分相电机其启动的转矩较小,因此很适于排风机、抽风机等要求启动力矩低的电器设备中应用。电容式启动电动机,由于其运行绕组分正、反相绕制设定,所以只要切换运行绕组和启动绕组的串接方向,即可方便实现电机逆、顺方向运转。 4.交、直流两用电动机 一般常用单相交流电动机,在交流50Hz电源中运行时,电动机转速较高的也只能达每分钟3000转。而交直流两用电动机在交流或直流供电下,其电机转速可高达20000转,同时其电机的输出启动力矩也大,所以尽管电机体积小,但由于转速高输出功率大,因此交直流两用电动机在洗衣机、吸尘器、排风扇等家用电器中得以应用。 交、直流两用电动机的内在结构与单纯直流电机无大差异,均由电机电刷经换向器将电流输入电枢绕组,其磁场绕组与电枢绕组构成串联形式。为了充分减少转子高速运行时电刷与换向器间产生的电火花干扰,而将电机的磁场线圈制成左右两只,分别串联在电枢两侧。两用电机的转向切换很方便,只要切换开关将磁场线圈反接,即能实现电机转子的逆转或顺转。
电机调速控制
一、直流电机调速方法 (1)调节电枢供电电压U。改变电枢电压主要是从额定电压往下降低电枢 电压,从电动机额定转速向下变速,属恒转矩调速方法。对于要求在一定范围内 无级平滑调速的系统来说,这种方法最好。I a 变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。 (2)改变电动机主磁通Φ。改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额定转速向上调速,属恒功率调速方法。 I f 变化时间遇到的时间常数同I a 变化遇到的相比要大得多,响应速度较慢, 但所需电源容景小。 (3)改变电枢回路电阻R。在电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。但是只能进行有级调速,调速平滑性差,机械特性较软;空载时几乎没什么调速作用;还会在调速电阻上消耗大暈电能。 二、异步电机调速方法 三相异步电动机转速公式为:n60f p1s。 从上式可见,改变供电频率f、电动机的极对数P及转差率s均可达到改变转速的目的。从调速的本质来看,不同的调速方式无非是改变交流电动机的同步转速或不改变同步转速两种。 在生产机械中广泛使用不改变同步转速的调速方法有绕线式电动机的转子串电阻调速、斩波调速、串级调速以及应用电磁转差离合器、液力偶合器、油膜离合器等调速。改变同步转速的有改变定子极对数的多速电动机,改变定子电压、频率的变频调速有能无换向电动机调速等。 从调速时的能耗观点来看,有高效调速方法与低效调速方法两种: (1)高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。 (2)有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中; (3)电磁离合器的调速方法,能量损耗在离合器线圈中;
三相异步电机VF调速
第1章绪论 1.1 毕业论文选题的背景 电动机作为主要的动力设备被广泛的应用于工农业生产、国防、科技、日常生活等各个方面,其负荷约占总发电量的60%"70%,成为用电量最多的电气设备。根据采用的电流制式不同,电动机分为直流电动机和交流电动机两大类,其中交流电动机形式多样、用途各异、拥有量最多,交流电动机又分为同步电动机和异步(感应)电动机两大类。根据统计,交流电动机用电量占电机总用电量的85%左右,可见交流电动机应用的广泛性及其在国民经济中的重要地位。电动机作为把电能转换为机械能的主要设备,在实际应用中,一是要使电动机具有较高的机电能量转换效率;二是根据生产机械的工艺要求控制和调节电动机的旋转速度。电动机的调速性能好坏对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响。电动机和控制装置一起合成电力传动自动控制系统。以直流电动机作为控制对象的电力传动自动控制系统称之为直流调速系统;以交流电动机作为控制对象的电力传动自动控制系统称之为交流调速系统。根据交流电机的类型,相应有同步电动机调速系统和异步电动机调速系统。 众所周知,直流电动机的转速容易控制和调节,采用转速、电流双闭环直流调速系统可获得优良的静、动态调速特性。因此,长期以来在变速传动领域中,直流调速一直占据主导地位。但是,由于直流调速系统解决不了直流电动机本身的的换向问题和在恶劣环境下的不适应问题,这就限制了直流调速系统的进一步发展。 交流电动机,特别是鼠笼型异步电动机,具有结构简单、制造容易、坚固耐用、转动惯量小、运行可靠、很少维修、使用环境及结构发展不受限制等优点。但交流电动机自1885年出现后,由于没有理想的调速方案,因而长期用于恒速拖动领域。20世纪70年代后,国际上解决了交流电动机调速方案中的关键问题,使得交流调速系统已具备了宽调速范围、高稳态精度、快速动态响应、高工作效率以及可以四象限运行等优异性能,其静、动态特性均可以和直流调速系统相媲美。 交流调速系统与直流调速系统相比,具有如下特点: (1)容量大。 (2)转速高且耐压高。 (3)交流电动机的体积、重量、价格比同容量的直流电动机小,且结构简
单相电机调速电路
单相电机调速电路 发布: 2011-6-14 | 作者: —— | 来源: 华强电子网用户| 查看: 333次 本文介绍一种简易电机调速电路,不用机械齿轮转化来变速,改善了机械设备使用的效率。 此简易电子调速电路适用于220V市电的单相电动机,电机额定电流在6.5A以内,功率在1kW左右,适用于家庭电风扇、吊扇电机及其它单相电机,若电路加以修改,则可作调光、电磁振动调压、电风扇温度自动变速器等用途。其电路如图1所示。 硅二极管VD1~VD4构成一个桥式全波整流电路,电桥与电机串联在电路中,电桥对可控硅VS提供全波整流电压。当VS接通时,电桥呈现本电机串联的低阻电路。当图1中A点为负半周时,电流经电机、VD1、VS、R1、VD3构成回路,当B 点为正半周时电流经VD2、VS、R1、VD4、电机M构成回路,电机端得到的是交变电流。电机两端的电压大小主要决定于可控硅VS的导通程度,只要改变可控硅的导通角,就可以改变VS 的压降,电机两端的电压也变化,达到调压调速的目的,电机端电压 Um=U1-UVD1-Uvs-UR1-UVD3,上式中,UVD1、UVD3的压降均很小,而反馈UR1也不大,故电机端电压就简化为Um=U1-Uvs。
可控硅VS的触发脉冲靠一只简单的单结晶体管VS电路产生,电容器C2通过电阻R4、R5充电到稳压管DW的稳定电压UZ,当C2充电到单结晶体管的峰点电压时,单结晶体管就触发,输出脉冲而使可控硅导通。在单结晶体管发射极电压充分衰减后,单结晶体管就断开,VS一经接通,那么a、b两点之间的电压就下降到稳压管DW的稳定电压UZ以下,电容器C2再充电就依赖于点a到b点间的电压,因稳压管的电压已经降低到它的导通区域以外,点a到b点的电压取决于电动机的电流、R1和VS 导通时的电压降。这样,当VS 导通时,电容器C2的充电电流取决于电动机的电流,在这种情况下便得到了反馈,这就使得电动机在低速时转矩所受损失的问题得到补救。 反馈电阻R1的数值经过实验得出,因此,VS在导通周期的时间内,电容C2便不能充电到足以再对单结晶体管触发的高压,然而,电容C2 会充电到电动机电流所决定的某一数值。如果在某一导通周期电动机的电流增加,则C2上的电压也增加,故在下一周期开始时,C2就不需那么长的时间才能充电到单晶体的峰点电压。这种情况下,触发角就被减少了(导通角更大),加到电机上的方根电压就成比例增加,致使有效转矩增加。二极管VD5和电容器C1防止在导通期中由于触发单结晶体所造成的反
交流异步电机的变频调速系统设计报告
交流异步电机的变频调速 系统设计报告 Last revision on 21 December 2020
单相异步电机变频调速器的设计 姓名: 陈焰 学院: 工学院 专业: 12级电气工程及其自动化 班级: 电气3班 学号: 日期 2015年1月17日—2015年1月23日指导教 刘权、孙磊 师: 安徽农业大学工学院电气工程系 摘要
近年来,交流电机变频调速及其相关技术的研究己成为现代电气传动领域的一个重要课题,并且随着新的电力电子器件和微处理器的推出以及交流电机控制理论的发展,交流变频调速技术还将会取得巨大进步。 现在流行的异步电动机的调速方法可分为两种:变频调速和变压调速,其中异步电动机的变频调速应用较多,它的调速方法可分为两种:变频变压调速和矢量控制法,前者的控制方法相对简单,有二十多年的发展经验。因此应用的比较多,目前市场上出售的变频器多数都是采用这种控制方法。 本文对变频调速理论,逆变技术,SPWM产生原理进行了研究,在此基础上设计了一种新型数字化三相SPWM变频调速系统,以8051控制专用集成芯片 SA4828为控制核心,采用IGBT作为主功率器件,同时采用EXB840构成IGBT的驱动电路,整流电路采用二极管,可使功率因数接近1,并且只用一级可控的功率环节,电路结构比较简单。 一、绪论 变频调速技术简介 变频调速技术是一种以改变交流电动机的供电频率来达到交流电动机调速目的的技术。大家都知道,目前,无论哪种机械调速,都是通过电机来实现的。从大的范围来分,电机有直流电机和交流电机。由于直流机调速容易实现,性能好,因此过去生产机械的调速多用直流电动机。但直流机固有的缺点:由于采用直流电源,它的滑环和碳刷要经常拆换,故费时费工,成本高,给人们带来太大的麻烦。因此人们希望,让简单可靠廉价的笼式交流电机也像直流电动机那样调速。这样就出现了定子调速、变极调速、滑差调速、转子串电阻调速、串极调速等交流调速方式。当然也出现了滑差电机、绕线式电机、同步式交流电机。随着电力电子技术、微电子技术和信息技术的发展,出现了变频调速技术,它一出现就以其优异的性能逐步取代其它交流电机调速方式,乃至直流电机调速,而成为电气传动的中枢[1]。 变频调速被认为是一种理想的交流调速方法。但如何得到一个单独向异步电动机供电的经济可靠的变频电源,一直是交流变频调速的主要课题。20世纪60年代中期,随着普通的晶闸管、小功率管的实用化,出现了静止变频装置,它是将三相的工频电源经变换后,得到频率可调的交流电。这个时期的变频装置,多为分立元件,它体积大、造价高,大多是为特定的控制对象而研制的,容量普遍偏小,控制方式也很不完善,调速后电动机的静、动态性能还有待提高,特别是低速的性能不理想,因此仅用于纺织、磨床等特定场合。
简易电机调速电路分析
简易电机调速电路分析 本文介绍一种简易电机调速电路,不用机械齿轮转化来变速,改善了机械设备使用的效率。 此简易电子调速电路适用于220V市电的单相电动机,电机额定电流在6.5A以内,功率在1kW左右,适用于家庭电风扇、吊扇电机及其它单相电机,若电路加以修改,则可作调光、电磁振动调压、电风扇温度自动变速器等用途。其电路如图1所示。 硅二极管VD1VD4构成一个桥式全波整流电路,电桥与电机串联在电路中,电桥对可控硅VS提供全波整流电压。当VS接通时,电桥呈现本电机串联的低阻电路。当图1中A 点为负半周时,电流经电机、VD1、VS、R1、VD3构成回路,当B 点为正半周时电流经VD2、VS、R1、VD4、电机M构成回路,电机端得到的是交变电流。电机两端的电压大小主要决定于可控硅VS的导通程度,只要改变可控硅的导通角,就可以改变VS的压降,电机两端的电压也变化,达到调压调速的目的,电机端电压Um=U1-UVD1-Uvs-UR1-UVD3,上式中,UVD1、UVD3的压降均很小,而反馈UR1也不大,故电机端电压就简化为Um=U1-Uvs。 可控硅VS的触发脉冲靠一只简单的单结晶体管VS电路产生,电容器C2通过电阻R4、R5充电到稳压管DW的稳定电压UZ,当C2充电到单结晶体管的峰点电压时,单结晶体管就触发,输出脉冲而使可控硅导通。在单结晶体管发射极电压充分衰减后,单结晶体管就断开,VS一经接通,那么a、b两点之间的电压就下降到稳压管DW的稳定电压UZ以下,电容器C2再充电就依赖于点a到b点间的电压,因稳压管的电压已经降低到它的导通区域以外,点a到b点的电压取决于电动机的电流、R1和VS导通时的电压降。这样,当VS 导通时,电容器C2的充电电流取决于电动机的电流,在这种情况下便得到了反馈,这就使得电动机在低速时转矩所受损失的问题得到补救。 反馈电阻R1的数值经过实验得出,因此,VS在导通周期的时间内,电容C2便不能充电到足以再对单结晶体管触发的高压,然而,电容C2会充电到电动机电流所决定的某一数
单相电机原理及调速
其实是这样,主线圈的1(2)接副线圈的2(1),这样就正传,反过来 主线圈的1(2)接副线圈的1(2),这样就反转, 以上两个图,一般的常规单相电机都可以用,不论他的主线圈与副线圈的参数一样不一样,另外还有一种单相电机,工作中需要他正反转,但是采用上面的办法,比较麻烦,实现自动控制,器件需要也多,所以就出现了,不分主副线圈的单相电机,就是主副线圈的参数一样,这种不分主副线圈的单相电机,除了用上面的这个办法外还可以这样 顺便说一下,洗衣机的电机就是不分主副的单相电机
第一个图和第二个是一样的,第二个比较清楚一点,第二个图还可以变形为这样,这样也可以实现反转 单相电机另一种画法 倒顺开关控制的单相电机正反转
落地扇电机接线图
来个用接触器控制的,单相电机正反转, 在KM1的下方红线和粉线互换,或者蓝线和黄线互换,电机就可以反转了KM1和KM2的二次线路就用三相电机的普通正反转互锁电路就行了
如何实现单相异步电动机的正反转? 单相异步电动机,如图所示。它有主绕组A1-A2,副绕组B1-B2+电容C组成。分布特点:在空空间互差90o。 设流过主绕组的电流为I a,流过副绕组的电流为I b。一般情况下,工作绕组的匝数多,电感大,是感性负载,那么I a在相位上滞后电源电压。 如图所示,因为I b比I a超前90o,这样在定子里就产生了旋转磁场,其旋转磁场为顺时针方向。 那么我们要实现反转,只要让I b滞后于I a 90°(或者换句话说,让I a超前I b 90°)。要实现这个很简单,只要ib翻转180°(或者ia翻转180°)就能实现了。 起动绕组中串有电容,适当选取电容值,就可以使起动绕组为容性负载,那么Ib在相位是超前电源电压。只要我们选择合适的电容,就可以使I b超过I a 90°。 那么如何实现I b翻转180°(或者I a翻转180°)呢?我们从它的接线图上可以看出,实际上主绕组同副绕组是接在同一个电源上的,也就是说他们的电压是同相位的。那要是我们把主绕组的L接A1 N接A2换一下,改成L接A2 N接A1,副绕组不变,维持L接B1 N接B2。那么主绕组的电压和副绕组的电压就有180°的相位差,也就是说主绕组的电流也翻转了180°。这时我们就实现了I b 滞后于I a 90°(或者换句话说,让I a超前I b 90°)。旋转磁场的方向为逆时针。实现了反转。 备注:实际应用中单相异步电动机有3种引线方式:
交流电机调速复习题
《现代电机控制技术》复习题 1. 试以“磁场”和“Bli ”的观点,阐述电磁转矩生成的原因和实质。 答:P10 2. 任意波形的定子电流通入相绕组后能否产生基波磁动势?为什么? 答:P22 3.试论述三相感应电动机各磁链矢量σψs 、g ψ、s ψ、σψr 、和r ψ的物理含义, 指出它们之间的联系和区别,并写出相应的磁链方程。 答:P31 4.为什么可以采用空间矢量理论来分析电动机的动态控制问题?矢量控制的含义是什么? 答:P41 5.为什么在转子磁场作用下,转子笼型绕组会具有换向器绕组的特性? 答:P50 6.什么是磁场定向?为什么在基于转子磁场的矢量控制中,一定要先将MT 轴系沿转子磁场方向进行磁场定向? 答:P52,P61 7.试论述电动机参数变化对直接和间接磁场定向的影响。 答:P69,P70,P71,P73 8.基于气隙磁场定向和基于定子磁场定向的矢量控制与基于转子磁场定向的矢量控制比较,有什么本质的不同? 答:P95 9.PMSM 的磁场定向指的是什么?为什么PMSM 的转子磁场定向相对三相感
应电动机的转子磁场定向要容易得多? 答:P116 10.对于面装式PMSM,是怎样将其变换为一台等效的直流电动机的? 答:P114 11.试论述弱磁控制的基本原理和控制方式。 答:P115,P122 13.为什么说PMSM矢量控制是一种自控式的控制方式?矢量控制会不会发生失步现象?为什么? 答:P117 14.试论述直接转矩控制的基本原理。 答:P139 15.除了定子磁链和转矩会计外,滞环比较控制是否还利用了电动机数学模型,这有什么好处? 答:P143 16.电动机转速大小对直接转矩控制有什么影响?为什么? 答:P146 17.为什么直接转矩控制是一种非线性控制?为什么通常选择滞环比较控制方式?这种控制方式有什么优点和不足? 答: 18.直接转矩控制能否改变三相感应电动机固有的非线性机械特性?为什么? 19.在直接转矩控制原理上,PMSM与三相感应电动机有什么共同之处?又有什么差别? 20.直接转矩控制是非线性的,根本原因是什么?
直流电机调速电路
电动机电子调速控制器一 本例介绍的电动机电子调速控制器,可用于600W以下、额定电压为22Ov的直流电动机的调速。 电路工作原理 该电动机电子调速控制器电路由电源电路、励磁电路、触发电路和调速控制电路组成,如图8-58所示。 电源电路由熔断器FU、电阻器Rl-R3、整流二极管VD5-VD9、稳压二极管VS和滤波电容器C3组成。 励磁电路由电阻器Rl5、Rl6、电容器Cl、C2和二极管Dl-D4组成。 触发控制电路由脉冲变压器T、单结晶体管VU、晶体管Vl、V2、二极管VDlO-VDl2、电容器C4-C6和电阻器R4-R7组成。 调速控制电路由晶闸管VTl、VT2、二极管VDl3-VDl5、电阻器R8-R14、电容器C7和电位器RP组成。 交流220V电压经Rl和R2限流降压、VDl-VD4整流、R3限流、VS稳压后,产生24V左有的脉动直流电压。该电压一路经R4为VU提供同步电源;另一路经VD9隔离、C3滤波后,为Vl、V2和由R8、RP、R9组成的分压电路提供22V稳定的直流电压。 交流220V电压还经VDl-VD4整流后加至直流电动机M的励磁绕组W上,作为励磁电源。 在RP的中心抽头处能得到可控制M转速的控制电压。调节RP的阻值,该电压可花4·6-2OV之间变化。 R12和R13组成电枢电压取样反馈电路,两电阻器的接点处产生0--9·3V的取样电压。该电压与控制电压叠加后加至Vl的基极,控制Vl和V2的工作电流。调节RP的阻值使Vl和V2的导通电流增大时,通过C5、VU和T、VDll使VTl和VT2的导通角增大,电枢电压升高,电动机M的转速加快;反之,调节RP的阻值使Vl和V2的导通电流变小时,VTl和V饱的导通也相应地变小,电枢电压下降,电动机M的转速降低。 Rl5、Cl和R16、C2为尖脉冲吸收电路,用来保护VDl-VD4。VDl3为续流二极管,用来消除M电枢绕组的反峰电压。R14和C7为峰值吸收电路,用来保护VTl和VT2。 改变电动机电枢电压极性或改变励磁电压极性,即可改变直流电动机的旋转方向。 元器件选择 Rl-R3均选用lOW的线绕电阻器;R4选用1/2W的金属膜电阻器;R5-RlO、Rl2和R13均选用1/4W金属膜电阻器;RIl选用4-5W的线绕电阻器;R14-R16均选用lW的金属膜电阻器。 RP选用3W的精密合成膜电位器或线绕电位器。 Cl、C2和C7均选用耐压值大于400V的CBB电容器;C3和C6均选用耐压值为5OV的铝电解电容器;C4和C5均选用耐压值为160V的涤纶电容器。 VDl-VD4和VDl3均选用1N6308(3A、600V)型硅整流二极管;VD5-VDl2均选用IN4007(1A、
一种单相异步电动机调速系统
3 结束语 利用晶闸管设计静止式变频电源,目前已成为矿井提升机低频拖动一个重要的研究开发方向[6],在具体设计开发过程中如果能尽可能利用其他辅助工具,如用S函数设计数字触发器和用Matlab建模等,不但可以最大程度地降低设计成本,而且可以很方便地对矿井提升机低频电源进行仿真设计。 参考文献: [1] 赵良炳.现代电力电子技术[M].北京:清华大学出版 社,1995. [2] Chen Z,S pooner E.A AC to AC converter with thyristor in2 verter and active compensation[C].P ower E lectronics and S peed Drives C on ference1996.[3] 易灵芝,王根平.基于T MS320LF2407A的三相低频电源 设计[J].矿山机械,2003,31(12):6769. [4] 魏克新.王云亮.M AT LAB语言与自动控制系统[M].北 京:机械工业出版社,1999. [5] 易灵芝,王根平.用Delphi实现矿井提升机低频电源装 置中可控硅触发角的计算[J].煤矿机械,2004,(3):17 19. [6] 马小亮.大功率交-交变频调速及矢量控制技术[M]. 北京:机械工业出版社,1999. 作者简介:易灵芝 (1966),女,湖南宁乡人,湘潭大学信息工程学院硕士研究生导师,副教授,2000年度湖南省普通高等学校青年骨干教师培养对象,研究方向为计算机测控技术、交流调速与电力电子装置;王根平 (1966),男,江西南昌人,浙江大学浙江大学机电系博士,高工,研究方向为计算机测控技术、通信及信号处理。 收稿日期:2004-05-19一种单相异步电动机调速系统 赵红菊1,杨 勇1,王孝武2 (1.哈尔滨工程大学,黑龙江哈尔滨,150001;2.哈尔滨市整流设备厂,黑龙江哈尔滨,150023) A K ind of Regulation S peed System for Single Asynchronous M otor ZH AO H ong-ju1,YANG Yong1,WANG Xiao-wu2 (1.Harbin Engineering University,Harbin150001,China;2.Harbin C ommute Factory,Harbin150023,China) 摘要:介绍了一种使用双向可控硅调压的小功率交流闭环调速系统。详细说明系统各组成部分及原理,并根据单相异步电动机的启动特性,设计出一种将双极性信号变为单极性信号并解出方向信号的控制电路。 关键词:单相异步电动机;交流调速;双向晶闸管 中图分类号:TP272 文献标识码:A 文章编号:1001-2257(2004)08-0034-03 Abstract:A kind of speed regulation system for AC -m otor using TRI AC was introduced in this paper.The system and the principle of each part were given in detail. Meanwhile,according to the start-trait of single asyn2 chronous m otor,the double-polar being trans formed into single-polar and giving signal-direction,a circle was designed. K ey w ords:single asynchronous m otor;AC regula2 tion speed;TRI AC 0 引言 单相异步电动机具有结构简单、成本低廉、运行可靠等优点,因而在小功率自动控制装置中得到了广泛应用[1]。但是由于单相异步电动机自身没有启动能力即启动转矩为零,所以要对单相异步电动机进行调速,必须对电动机产生启动转矩采取合适的方法。 1 单相异步电动机调速原理[2-3] 电容运转式异步电动机的接线原理如图1所示。电动机定子上有2个绕组AX和BY,分别称主绕组和副绕组,其轴线在空间相互垂直。在2个绕 ? 4 3 ?《机械与电子》2004(8)