安卓系统开发与机器人
安卓系统开发与机器人
摘要:
关键词:安卓,机器人,智能
引言:
延伸本专业的特点与安卓系统开发相结合,通过文献寻找,自我思考,专业书籍的研究,通过寥寥千字的介绍,将搜集的资料全盘托出。
1 系统总体方案设计
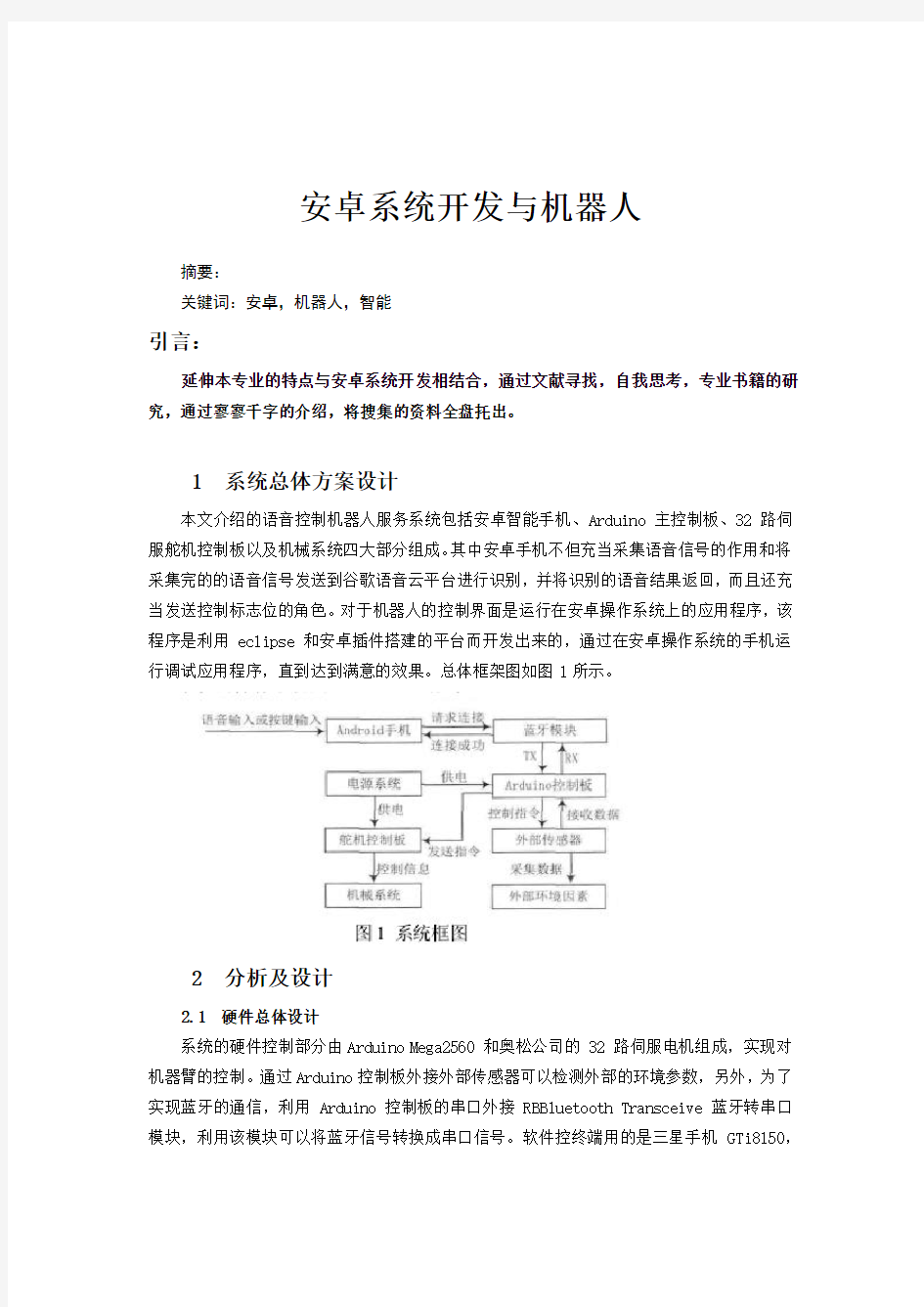
本文介绍的语音控制机器人服务系统包括安卓智能手机、Arduino 主控制板、32 路伺服舵机控制板以及机械系统四大部分组成。其中安卓手机不但充当采集语音信号的作用和将采集完的的语音信号发送到谷歌语音云平台进行识别,并将识别的语音结果返回,而且还充当发送控制标志位的角色。对于机器人的控制界面是运行在安卓操作系统上的应用程序,该程序是利用 eclipse 和安卓插件搭建的平台而开发出来的,通过在安卓操作系统的手机运行调试应用程序,直到达到满意的效果。总体框架图如图1所示。
2 分析及设计
2.1 硬件总体设计
系统的硬件控制部分由Arduino Mega2560 和奥松公司的 32 路伺服电机组成,实现对机器臂的控制。通过Arduino控制板外接外部传感器可以检测外部的环境参数,另外,为了实现蓝牙的通信,利用 Arduino 控制板的串口外接 RBBluetooth Transceive 蓝牙转串口模块,利用该模块可以将蓝牙信号转换成串口信号。软件控终端用的是三星手机 GTi8150,
该手机的操作系统是Android 2.3 版本。
系统的通信部分涉及到三部分:第一处是安卓手机通过 GPRS 信号和谷歌云平台的通信,该通信遵守 GPRS 通信的协议。第二处是安卓手机和控制板之间的通信,此处利用的是蓝牙模块来实现二者之间的无线通信,这里主要是从手机发送机器人的动作控制标志位给主控制板。第三处则是舵机控制板和主控板之间通过串口的通信,其通信遵守串口的通信协议,这里主要是主控板将机器人的动作指令根据触发的控制标志位来发送给舵机控制板指令。
系统的舵机控制板主要负责给各个舵机提供电源和解析发送过来的动作指令来控制舵机的目的。因为机器人的动作指令是根据舵机控制板的软件生成的,生成指令是通过 USB 转串口将 PC 和舵机控制板连接,而舵机则跟舵机控制板连接,当连接成功后,就可以通过软件控制和调节各个舵机的转动角度。同时要注意动作完成时间参数的调节,这个影响到舵机转动的速度。调节逐个舵机来对机器人的动作步调来进行规划,规划完成则保存相应的指令,并编写程序实现对该arduino 主控板的控制。所以这里舵机控制板能够根据发送过来的动作指令来控制机器人的动作。
2.2 程序设计
系统软件主要包括两部分,一部分是安卓系统上的控制程序的设计,包括语音识别的控制和手动按键的控制,另外一部分是Arduino 控制板中程序的设计。
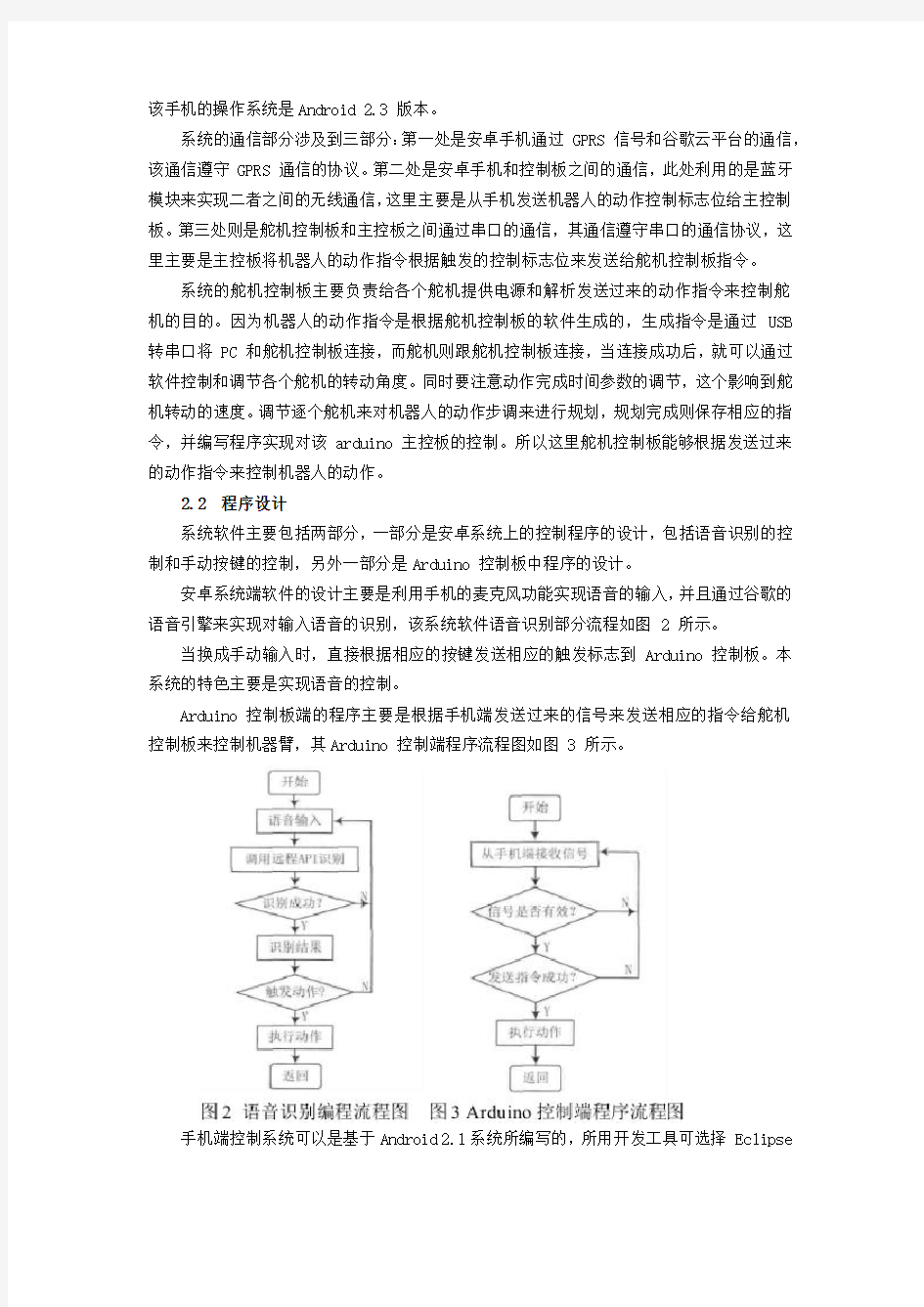
安卓系统端软件的设计主要是利用手机的麦克风功能实现语音的输入,并且通过谷歌的语音引擎来实现对输入语音的识别,该系统软件语音识别部分流程如图 2 所示。
当换成手动输入时,直接根据相应的按键发送相应的触发标志到 Arduino 控制板。本系统的特色主要是实现语音的控制。
Arduino 控制板端的程序主要是根据手机端发送过来的信号来发送相应的指令给舵机控制板来控制机器臂,其Arduino 控制端程序流程图如图 3 所示。
手机端控制系统可以是基于Android 2.1系统所编写的,所用开发工具可选择 Eclipse
集成开发环境,Eclipse 是著名的跨平台的自由集成开发环境(IDE)。最初主要用来 Java 语言开发,但是目前亦有人通过插件使其作为其他计算机语言比如 C++、Python 和 Android 的开发工具,在此开发环境下开发软件非常的方便。
结论
以上皆是纸上谈兵之见,若能实现为美,不成为则为以后之成功做铺垫。设计基于Android 系统手机和Arduino 控制板的机器人控制系统,通过接收人的语音或者按键来操作机器人的运动状态,采用安卓智能手机来进行语音的处理和谷歌云平台对语音的识别,利用蓝牙来进行数据的通信,舵机控制板软件规划出机器人的各种动作并且生成的动作指令,最后由控制板来实现完成该相应的动作。利用了蓝牙无线通信,摆脱有线困扰,使得系统有广泛的适用范围。安卓与ios皆为现在中国人最常用的两大手机操作系统,而机器人操作软件将来必定会在此两系统上大发异彩,让我们拭目以待。
工业机器人机械系统设计
工业机器人机械系统设计 机器人技术是利用计算机的记忆功能、编程功能来控制操作机自动完成工业生产中某一类指定任务的高新技术,是当今各国竞相发展的高技术内容之一。它是综合了当代机构运动学与动力学、精密机械设计发展起来的产物,是典型的机电一体化产品,工业机器人由操作机和控制器两大部分组成。操作机按计算机指令运动,可实现无人操作;控制器中计算机程序可依加工对象不同而从新设计,从而满足柔性生产的需要。 机器人应用领域广泛,包括建筑、医疗、采矿、核能、农牧渔业、航空航天、水下作业、救火、环境卫生、教育、娱乐、办公、家用、军用等方面,工业机器人在国内主要应用于危险、有毒、有害的工作环境以及产品质量要求高(超洁、同一性)的重复性作业场合,如焊接、喷涂上下料、插件、防爆等。 一、工业机器人的总体设计 1.主体结构设计 工业机器人主体结构设计的主要问题是选择由连杆件和运动副组成的坐标形式。工业机器人的坐标形式主要有直角坐标式、圆柱坐标式、球面坐标式、关节坐标式等。 直角坐标式机器人主要用于生产设备的上下料,也可用于高精度的装配和检测作业。 圆柱坐标式机器人主要有三个自由度:腰转,升降,手臂伸缩。手腕常采用两个自由度,绕手臂纵向轴转动与垂直的水平轴线转动。手腕若采用三个自由度,机器人总自由度达到六个。 球面坐标式机器人也叫极坐标式机器人,具有较大的工作范围,设计和控制系统比较复杂。 关节坐标式主体结构的三个自由度腰转关节、肩关节、肘关节全部是转动关节,手腕的三个自由度上的转动关节(俯仰、偏转和翻转)用来最后确定末端操
Cobra Series 桌面机器人 Reach:600mm/800mm Payload:5.5kg Repeatability:0.02mm Weight:34/35kg Desingn Life: 60 Million Cycles SmartModules 框架机器人 Mas Stroke:2000mm Min Stroke:130mm Number of Axis: 1 to 3 Max Payload:60kg Max speed:1200mm/sec Repeatability:0.01mm Design Life:5000km Cartesian Robots Size:600*450mm Payload:5.5kg Accuracy:0.025mm Weight:54kg Design Life:5000km 直角坐标机器人工作台: 2.传动方式 传动方式选择是指选择驱动源及传动装置与关节部件的连接形式和驱动形式,主要包括: 直接连接传动。驱动源或带有机械传动装置直接与关节相连。 远距离连接传动。驱动源通过远距离机械传动后与关节相连。 间接驱动。驱动源经一个速比远大于1的机械装置与关节相连。 直接传动。驱动源不经过中间环节或经过一个速比等于1的机械传动这样的 中间环节与关节相连。 3.模块化结构设计 模块化机器人是有一些标准化、系列化的模块件通过具有特殊功能的结合部用积木拼接的方式组成一个工业机器人系统。模块化设计是指基本模块设计和结合部设计。 模块化工业机器人主要的特点是:经济性、灵活性 4.材料的选择 与一般机械设备相比,机器人结构的动力特性是十分重要的,这是材料选择的出发点。材料选择的基本要求是:强度高、弹性模量大、重量轻、阻尼大、材料价格低。 5.平衡系统设计 工业机器人是一个多刚体耦合系统,系统的平衡性是极其重要的,在工业中采用平衡系统的理由是:安全、借助平衡系统能降低因机器人结构变化而导致重力引起关节驱动力矩变化的峰值、借助平衡系统能降低因机器人运动而导致惯性
工业机器人工作站系统集成技术教学大纲教学文案
工业机器人工作站系统集成技术 一、说明 1.课程的性质和内容 《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。二、学时分配表
三、课程内容及要求 模块一工业机器人码垛工作站系统集成 教学要求 1.了解工业机器人码垛工作站的组成。 2.掌握码垛工作站的机械装配。 3.掌握码垛工作站系统编程。 教学内容 任务1 认识码垛工业机器人工作站 任务2 筛选皮带机构的组装、接线与调试 任务3 立体码垛单元的组装、程序设计与调试 任务4 步进升降机构的组装、接线与调试 任务5 检测排列单元的程序设计与调试 任务6 机器人单元的程序设计与调试 任务7 机器人自动换夹具的程序设计与调试 任务8 机器人轮胎码垛入仓的程序设计与调试 任务9 机器人车窗分拣及码垛程序设计与调试 任务10 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 模块二工业机器人涂胶装配工作站系统集成 教学要求 1.了解工业机器人涂胶工作站的组成。 2.掌握涂胶工作站的机械装配。 3.掌握涂胶工作站系统编程。 教学内容 任务1 认识涂装工业机器人 任务2 上料涂胶单元的组装、程序设计与调试 任务3 多工位旋转工作台的组装、程序设计与调试 任务4 机器人单元的程序设计与调试 任务5 机器人自动换夹具的程序设计与调试 任务6 汽车车窗框架预涂胶的程序设计与调试 任务7 机器人拾取车窗并涂胶的程序设计与调试 任务8 机器人装配车窗的程序设计与调试
android系统开发工作介绍
android系统开发工作介绍 一、android的开发工作 Android的开发分为三个类型:移植开发移动设备系统;android系统级开发和应用程序开发。 1、移植开发移动设备系统 2、Android系统级开发,指的是扩展android的框架或者是修改bug,这方面比较少,除非有些开发移动设备的厂商,比如做gps,可以往里面加入一些自己的特定系统东西,这可能导致一些不兼容。当然也可能是简单的修复bug,详细的内容后面还有说。 3、开发应用程序,这应该是比较主流的开发,也就是给android系统写应用程序。当然我们这里主要是研究android的framework如何给这些应用程序提供服务的。 总结一下,我们可以把android分为四个层次,从底层往上依次为:linux内核、C/C++库、java 框架和java应用程序。移植开发移动设备涉及到linux内核(包括其驱动);android系统级开发涉及到C/C++库的开发及给上层java框架;android应用程序开发就是调用java的框架写应用程序。 简单的从上到下,android应用程序需要有java框架支持,比如它要发送短信,就需要java 框架,java框架其实就是将C/C++库包装成为了一个JNI,而实现具体的功能是C/C++库,最后驱动硬件完成功能,这也就是linux内核部分。 所谓framework,也就是系统级开发,这将是本文的重点,虽然android的framework 开发比较少,但是对其了解后更有利于整体开发的进行,当然很多设备厂商还是非常需这要些的。 二、android系统架构
Linux内核及驱动、C/C++框架、java框架、java应用程序。 1)、Linux内核及驱动 其中linux内核及驱动是内核层的(本人对linux内核也有过痴迷的时候,就像现在android 痴迷一样),系统总是需要操作系统的支持的,比如内存管理、进程管网理、络协议栈等。 2)、android的C/C++框架 系统C库:用的是libc,没什么好说的,C程序员都知道。多媒体库SurFace Manager:显示子系统的管理器LibWebCore:web浏览器引擎,支持android浏览器SGL:skia图形库,底层的2D图形引擎 3D库:OpenGL FreeType:字体显示Android的运行环境,这个也应该属于这个框架里面的,android的虚拟机叫做Dalvik,运行环境就是由这个虚拟机和基础的java类库组成。 3)、android应用框架 提供一系列的服务和系统,包括视图、内容提供器、资源管理器、通知管理器活、动管理器。 视图非常丰富:list、grid、text box、button等。内容提供器是使得应用程序可以访问另一个程序的数据。资源管理器是提供访问非代码的资源访问,如布局文件。通知管理器,使得程序可以在状态栏中显示自定义的提示信息。活动管理器,用来管理程序生命周期。 4)、android应用程序Android所有的应用程序都是用java写的,当然现在好像也支持一些脚本语言,如 ruby,但是不支持C开发,所谓支持C开发是指jni的形式。 。。。。。。。。。
十大优秀工业机器人系统集成商分析
十大优秀工业机器人系统集成商 分析 十大优秀工业机器人系统集成商分析 工业机器人产业是一个集系统集成、先进制造和精密配套融合一体的产业,是一个需要技术、制造、研发沉淀经验的行业。从我国机器产业链发展来看,由于受核心技术限制等多方面因素影响,我国工业机器人产业目前获得突破的主要为系统集成领域。国内一些领先企业从集成应用开始,主要借助对国内市场需求、服务等优势,逐渐脱颖而出,取得了不错的市场成绩。笔者对获得2013年十大优秀工业机器人系统集成商的发展概况及主要产品进行了简单归纳分析,以飨读者。 1、佛山市利迅达机器人系统有限公司(简称:利迅达) 佛山市利迅达机器人系统有限公司是从事机器人系统自动化集成和工业智能化设备研发、生产的高科技企业。公司筹备于2008年,于2010年4月正式成立,经过数年迅猛增长,已发展成为华南地区乃至国内规模最大,实力最强的专业工业机器人应用系统集成商。
利迅达与欧州多家高技术企业的机器人系统研发生产企业战略合作,令利迅达由一开始就在一个国际级的高起点上,再根据中国市场实际,研发出一系列具自有知识产权的全新意念的金属产品表面处理综合系统。其中“机器人打磨拉丝 系统”被评为2011年广东省高新技术产品;“机器人智能化焊接系统”被评为2012年广东省高新技术产品。公司为顺德区百家智能制造工程试点示范企业,在2013年被认定为国家级高新技术企业。 2、厦门思尔特机器人系统有限公司(简称:思尔特) 思尔特创建于2004年6月,位于厦门集美灌南工业区,是厦门市高新技术企业。思尔特多年来为中联、徐工、柳工、厦工、龙工、玉柴等多家国内大中型企业服务,设计制造出技术先进的机器人系统。 2009年,思尔特在上海成立全资子公司上海思尔特机器人科技有限公司,针对冲压机、折弯机、压铸机、弯管机、热锻机等机床的自动上下料生产线的研发、设计、制造。 2010年,思尔特决定打造西南区制造基地,于2010年7月注册成立全资子公司成都思尔特机器人科技有限公司。成都思尔特是西南地区首家专业机器人系统集成商,具有年集成200套机器人系统的能力,主营方向为汽车零部件及薄板焊接的机器人应用。 3、无锡丹佛数控装备机械科技有限公司(简称:丹佛) 无锡丹佛数控装备机械科技有限公司成立于2010年,现阶段主要经营项目分别为:abb工业机器人、韩国现代工业机器人、焊接机器人、搬运机器人、涂装机器人、机床上下料机器人、码垛机器人、焊接机器人、机器人取毛刺等等,同时为客户提供夹具设计制造及交钥匙工程。 丹佛又与几家大型的融资企业签订战略合作合伙,为那些有订单有市场而没有太多
工业机器人机械手及其控制系统设计
摘要 工业机器人技术是近年来新技术发展的重要领域之一,是以微电子技术为主导的多种新兴技术与机械技术交叉、融合而成的一种综合性的高新技术。这一技术在工业、农业、国防、医疗卫生、办公自动化及生活服务等众多领域有着越来越多的应用。工业机器人在提高产品质量、加快产品更新、提高生产效率、促进制造业的柔性化、增强企业和国家的竞争力等诸多方面有着举足轻重的地位。而机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一;是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分;是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。尤其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。 本课题将设计一台四自由度的工业机器人,将会被用作自动送料装置。主要工作部件及设计重点就是机械手。第一,本人将设计该机器人的底座、大臂、小臂以及执行机构机械手爪的结构和模型;第二,再设计出适合于该机器人的驱动、传动方式,以期构成其的结构平台。最后,在此基础上再将其控制系统设计出来,由下面几个步骤组成:数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计。其中重点要加强控制软件的可靠性和机器人运行过程的安全性,最终要实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。 关键词:工业机器人;机械手;驱动;控制
Abstract Industrial robot technology is one of the important fields in the development of new technologies in recent years, is a cross, a variety of emerging technology and mechanical technology integration with microelectronics technology as the leading into a comprehensive high and new technology. This technology has been used more and more in the fields of industry, agriculture, national defense, medical, office automation and service life. Industrial robots play a decisive role in improving the quality of products, to speed up the update products, improve production efficiency, promote manufacturing flexibility, strengthen enterprise and national competitiveness etc. The manipulator is the traditional task execution mechanism of industrial robot system, is one of the key components of the robot; is a product of modern control theory and automation of industrial production practice, and to become an important part of modern mechanical manufacturing system; it is one of the effective ways to improve the production process automation, improve working conditions, to improve the product quality and production efficiency. Especially with a radioactive pollution in high temperature, high pressure, dust, noise and occasions, more widely applied. This topic will be the design of industrial robot with a four degree of freedom, will be used for the automatic feeding device. The main working parts and design focus is manipulator. First, the base, I will design the robot big arm, small arm and gripper actuator structure and model; second, redesign drive, drive mode suitable for the robot, in order to form the structure of platform. Finally, on the basis of the designed control system, consisting of the following steps: the design of data acquisition card and servo amplifier selection, feedback system and the feedback component selection, terminal board circuit design and control software. The key to strengthen the security of operation reliability and robot control software, to achieve the ultimate goals include: Joint servo control and brake problems, real-time monitoring the movement of each joint of robot, robot teaching programming and online modify the program, set the reference point and the reference point return. Key Words:Industrial robot; Manipulator; Drive; Control
工业机器人系统集成篇
一、机器人系统集成介绍 1.机器人工业化模式 工业机器人系统集成商处于机器人产业链的下游应用端,为终端客户提供 应用解决方案,其负责工业机器人应用二次开发和周边自动化配套设备的集成,是工业机器人自动化应用的重要组成。只有机器人本体是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。 相较于机器人本体供应商,机器人系统集成供应商还要具有产品设计能力、对终端客户应用需求的工艺理解、相关项目经验等,提供可适应各种不同应用 领域的标准化、个性化成套装备。从产业链的角度看,机器人本体(单元)是 机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。本体产品由于技术壁垒较高,有一定垄断性,议价能力比较强,毛利较高。而系统集成的壁垒相对较低,与上下游议价能力较弱,毛利水平不高,但其市 场规模要远远大于本体市场。 工业机器人产业化过程中,可以归纳为三种不同的发展模式,即日本模式、欧洲模式和美国模式。 日本模式:各司其职,分层面完成交钥匙工程。即机器人制造厂商以开发 新型机器人和批量生产优质产品为主要目标,并由其子公司或社会上的工程公 司来设计制造各行业所需要的机器人成套系统,并完成交钥匙工程; 欧洲模式:一揽子交钥匙工程。即机器人的生产和用户所需要的系统设计 制造,全部由机器人制造厂商自己完成; 美国模式:采购与成套设计相结合。美国国内基本上不生产普通的工业机 器人,企业需要时机器人通常由工程公司进口,再自行设计、制造配套的外围 设备,完成交钥匙工程中国与美国类似,机器人公司集中在机器人系统集成领域。 目前,国内的机器人企业多为系统集成商。根据国际经验来看,国内的机 器人产业发展更接近于美国模式,即以系统集成为主,单元产品外购或贴牌, 为客户提供交钥匙工程。与单元产品的供应商相比,系统集成商还要具有产品 设计能力、项目经验,并在对用户行业深刻理解的基础之上,提供可适应各种 不同应用领域的标准化、个性化成套装备。 中国机器人市场基础低、市场大。中国机器人产业化模式较可行的是从集 成起步至成熟阶段采用分工模式。即美国模式(集成)-日本模式(核心技术)-德国模式(分工合作)。 2.工业机器人集成产业应用方向
移动机器人控制系统的发展方向
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
工业机器人系统设计
多年质保操作简单方便快捷—————————————————————————————————————————————社会的迅速发展推动工业的更新升级,随着工业生产生活的发展,在厂家机械设备方面也同样需要相对应进行。工业机器人有比较强的可控能力以及生产能力,能够加快产品的更新换代。接下来由安徽泰珂森智能装备科技有限公司为您简单介绍其集成系统设计,希望能给您带来一定程度上的帮助。 控制系统是整条生产线的指挥调度中心,调度和指挥各系统单元设备完成各自的工作,需具有以下功能: ①生产线运行控制功能。主要是协调、控制、保障整条锻造生产线、可靠运行,根据工艺要求把生产线分为几个区域。采用区域启动、分区控制方式来完成对整个生产线的控制。总线通过检测各单机设备的运行状态,在某一区域或某一设备故障时,指挥其它设备动作,根
多年质保操作简单方便快捷—————————————————————————————————————————————据不同的状态对各单机设备发出等待、重启、权限停车等不同指令; ②现场监控功能。提供生产场景在线仿真界面,图形化实时显示在线产品所处工序、产品信息、设备状态、故障情况提示、报警信息等; ③生产管理功能。对各种生产信息进行收集、传输、统计并执行生产管理指令的人机交互系统; ④数据处理功能。监控系统具有数据采集,显示和记录功能,对于数字量,监控系统可以直接显示状态;对于模拟量既可进行趋势显示,又可进行数字显示。同时,对于重要数据可以进行数据库存储,以便对生产数据进行分析处理。 安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集
多年质保操作简单方便快捷—————————————————————————————————————————————成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。 公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。致力于以工业机器人应用为核心,为客户提供完善的自动化解决方案和交钥匙工程,同时是德国库卡、日本发那科、日本川崎、国产埃夫特机器人授权代理商与系统集成商,在机器人技术应用上有着密切的合作,为用户提供强有力的技术支撑。
安卓系统开发教学大纲
《安卓系统开发》课程教学大纲 课程编号: 课程名称:安卓系统开发 英文名称: 课程类型: 专业选修课 课程性质:选修 总学时:48 讲课学时:32 实践(实验)学时:16 学分:3 适用对象: 计算机科学与技术专业 先修课程:java程序设计 一、编写说明 (一)制定大纲的依据:本大纲是根据国家教委高教司颁布的本科基础课教学基本要求,结合我院培养目标制定的。 (二)课程简介:从基础开始学习,循环渐进,精通Google Android 开发,熟练掌握3G 移动应用程序开发,通过项目实践,提升动手能力,将所学知识整合运用到项目中。具体内容包括:Android环境的搭建,Android项目结构分析,用户界面设计,2D、3D图形绘制,数据存储和访问,定位服务于地图应用,网络编程,Android NDK开发及综合案例。 (三)课程的地位与作用:安卓系统开发课程是高等工科学校教学计划中计算机相关专业一门重要的选修课,是为学习移动手机开发的必要课程。通过实训教学,在岗位技能方面,经过大量的上机练习、代码阅读、代码改错、规范化检查,训练学生编写程序的熟练度和规范性;在项目经验的积累方面,通过完成大量的项目案例和阶段项目实战,增加对实际软件项目开发的体验;在职业素质方面,通过项目组角色分配、技术研讨等多种训练手段,培养学生具备良好的职业习惯,实现学生在校即成为准职业人的目标。 (四)课程性质、目的和任务:安卓系统开发时高等工科院校计算机专业学生一门选修的重要的理论与实践课,它是为培养我们社会主义现代化建设所需要的高质量专业人才服务的。Android作为目前高端智能手机操作系统,其前景不可限量。本课程主要从java基础开始学习,循环渐进,以培养3G网络工程师为目标,深入讲解Google Android 开发实战,整套课程内容完善深入。 (五)与其他课程的联系:安卓系统开发是计算机专业的一门重要的选修课。 (六)对先修课的要求:学习本课程需要java基础、数据结构作为预备知识。 二、大纲内容 第一章 Android基础知识 (一)教学目的和任务 通过本章的教学,使学生正确理解安卓开发的基本概念,掌握安卓的特点、环境的搭建以及程序运行的基本流程,提高学生对安卓开发的认知度。 (二)教学基本要求 了解Android的特征、特色,掌握Android环境的搭建,Android程序开发的步骤。 (三)教学重点和难点 重点:掌握Android环境的搭建。 难点:Android程序开发的步骤。
工业机器人系统集成市场现状与特点
工业机器人系统集成市场现状与特点 目前大多数国内机器人厂商业务集中于此,竞争激烈从产业链的角度看,机器人本体(单元)是机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。只有机器人裸机是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。系统集成方案解决商处于机器人产业链的下游应用端,为终端客户提供应用解决方案,其负责工业机器人软件系统开发和集成,是工业机器人自动作业的重要构成。在我国,系统集成商多是从国外购臵机器人整机,根据不同行业或客户的需求,制定符合生产需求的解决方案。 系统集成想从小做大规模并不容易。系统集成企业的工作模式是非标准化的,从销售人员拿订单到项目工程师根据订单要求进行方案设计,再到安装调试人员到客户现场进行安装调试,最后交给客户使用,不同行业的项目都会有其特殊性,很难完全复制。如果专注于某个领域,可以获得较高的行业壁垒,但这个壁垒也使系统集成企业很难跨行业去扩张,其规模也很难上去。 尽管存在诸多障碍,近年来国内还是涌现一批系统集成行业的佼佼者。国际机器人系统集成企业主要有kuka、abb、发那科、科马、锐驰机器人、徕斯等。国内涉足下游集成应用领域的上市公司包括新松机器人、博实股份、天奇股份、广州数控、埃斯顿等,其中新松机器人为国内最大的系统集成商,主要从事工业机器人及自动化成套装备系统的研发、制造。新三板公司有伯朗特、林克曼、拓斯达等。 机器集成产业现状 机器人系统集成商作为中国机器人市场上的主力军,普遍规模较小,年产值不高,面临强大的竞争压力。根据GGII的数据显示,截至2014年9月,中国机器人相关企业428家,其中系统集成商就占88%,并且从相关市场数据来看,现阶段国内集成商规模都不大,销售收入1个亿以下的企业占大部分,能做到5个亿的就是行业的佼佼者,10个亿以上的全国范围屈指可数。 一般工业是指非汽车行业。目前汽车行业的自动化程度比较高,供应商体系相对稳定。而一般工业的自动化改造需求相对旺盛。全球工业机器人集成从应用角度看“搬运”占比最高。全球工业机器人销量中,半数机器人用于搬运应用。搬运应用中又可以按照应用场景不同分为拾取装箱、注塑取件、机床上下料等。按照应用来分,占比前三的应用为搬运50%,焊接28%,组装9%。现阶段工业机器人系统集成有如下特点: 1)不能批量复制 系统集成项目是非标准化的,每个项目都不一样,不能100%复制,因此比较难上规模。能上规模的一般都是可以复制的,比如研发一个产品,定型之后就
移动机器人控制系统设计
? 197 ? ELECTRONICS WORLD?技术交流 移动机器人控制系统设计 广东工业大学 侯晓磊 随着移动机器人在人们社会生活中的地位不断提高,设计一种 可靠、稳定的机器人控制系统越发的变得重要起来,以NI公司的MyRIO控制器以其安全可靠、编程开发简单而脱颖而出。本文基于上述控制器、L298N电机驱动芯片Labview设计一种移动机器人控制软硬件系统系统,经验证,该系统运行稳定、可靠、高效。 1.前言 新一轮科技革命引发新一轮产业革命。“互联网+制造”构建工业4.0,智能制造成为我国由制造大国向制造强国转变的关键一步,移动机器人作为智能制造中的一个组成部分,作用越发的变得举足轻重。本文给出一种以MyRIO+L298N+Labivew的移动机器人控制系统。 2.IN MyRIO控制器 NI myRIO是NI最新设计的嵌入式系统设计平台。NI myRIO中内含双核ARM Cortex-A9,实时性高,并且还可以便捷定制FPGA I/ O,给开发设计人员提供更好的设计复杂系统的平台。 NI myRIO作为可重配置控制器具有以下重要特点: 易于上手使用:引导性安装和启动界面可使开发人员更快地熟悉操作,协助开发人员快速了解工程概念,完成设计任务。编程设计简单,利用实时应用、内置WiFi等功能,开发人员可以实现远程部署应用,“无线”操控。 板载资源众多:有丰富的数字I/O接口,提供SPI串行外设接口、PWM脉宽调制输出端口、正交编码器输入端口、UART异步收发器端口和I2C总线接口、多个单端模拟输入、差分模拟输入和带参考的模拟输入等可供选择的资源。 另外,NI MyRIO还提供可靠性能较好的控制器保护电路,防止由于意外操作造成控制器不可恢复性损坏,总之,NI MyRIO为开发人员提供了一个编程简易,设计电路方便,不用刻意担心意外操作而影响控制器使用的平台。 3.L298N电机控制芯片 L298N是一种用来驱动电机的集成电路,可以较稳定的输出平稳电流和较强的功率。工作均电流为2A,最高可达4A,最高输出电压为50V,能够带动带有感性元件的负载。控制器可以直接通过输入输出口与电机驱动芯片联接,从而方便控制驱动芯片的输出。如将芯片驱动直流电机时,可以直接与步进电机相联接,通过调节控制器输出实现步进电机的的正反转功能当控制直流电机时,可以通过调节控制芯片的电压信号的极性,PWM波的占空比,从而实现直流电机转速和转向的调节。4.系统硬件部分设计 系统采用MyRIO整体框架,外围增设电机驱动电路、避障驱动电路、里程计电路、液晶显示电路、陀螺仪电路。通过MyRIO主控制发送控制信号驱动移动机器人运动,实时通过外围传感器获取位置信息反馈给主控制 器,然后控制器通过闭环系统调节当前位置以保证对目标位置的追踪。 图1 5.系统软件部分设计 系统软件部分采用经典控制理论的闭环控制系统,将电机、主控制器和外设传感器构成闭环系统,通过调节闭环统的参数,来使 移动机器人以较小偏差追踪按照预定轨迹。 图2 6.结束语 本文介绍了基于NI MyRIO控制器设计移动机器人控制系统,通过仿真和实物测试,能较好的完成对任务的追踪踪。 参考:From Student to Engineer:Preparing Future Innova-tors With the NI LabVIEW RIO Architecture https://www.360docs.net/doc/ea5250542.html,.2014-04-01;王曙光,袁立行,赵勇.机器人原理与设计.人民邮电出版社,2013 。
工业机器人课程设计--多功能机械手-精品
《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
Android系统开发入门
Android系统开发入门 注:相信大家都知道Android的APP的是用Java写的,运行在Dalvik 虚拟机上,还有,Android的系统是基于Linux Kernel 2.6的。那么,要想深入了解Android系统的各种细节,当然少不了Linux Kernel 的知识了。阅读本文需要具备一定的C和JAVA语言基础,并且对linux 系统有一定了解。最好对C++也有一定的了解。 本文的内容是基于Android2.2版本平台,以一个设备(将系统内存模拟成一个带4字节寄存器的设备)为例,从底层驱动,到中间件,到上层应用程序全过程的代码实现。 所编写的代码例子,都可以在Android模拟器进行运行。但由于https://www.360docs.net/doc/ea5250542.html,在2011年9月份被人黑了无法访问,导致本人没有下载goldfish_defconfig,无法编译能在模拟器运行的kernel,故采用JZ4760BLYNX开发板运行代码例子。 搭建好JZ android编译环境,开始进行android系统开发之旅。 Android硬件抽象层(HAL)概要介绍和学习计划
Android的硬件抽象层,简单来说,就是对Linux内核驱动程序的封装,向上提供接口,屏蔽低层的实现细节。也就是说,把对硬件的支持分成了两层,一层放在用户空间(User Space),一层放在内核空间(Kernel Space),其中,硬件抽象层运行在用户空间,而Linux 内核驱动程序运行在内核空间。为什么要这样安排呢?把硬件抽象层和内核驱动整合在一起放在内核空间不可行吗?从技术实现的角度来看,是可以的,然而从商业的角度来看,把对硬件的支持逻辑都放在内核空间,可能会损害厂家的利益。我们知道,Linux内核源代码版权遵循GNU License,而Android源代码版权遵循Apache License,前者在发布产品时,必须公布源代码,而后者无须发布源代码。如果把对硬件支持的所有代码都放在Linux驱动层,那就意味着发布时要公开驱动程序的源代码,而公开源代码就意味着把硬件的相关参数和实现都公开了,在手机和平板市场竞争激烈的今天,这对厂家来说,损害是非常大的。因此,Android才会想到把对硬件的支持分成硬件抽象层和内核驱动层,内核驱动层只提供简单的访问硬件逻辑,例如读写硬件寄存器的通道,至于从硬件中读到了什么值或者写了什么值到硬件中的逻辑,都放在硬件抽象层中去了,这样就可以把商业秘密隐藏起来了。也正是由于这个分层的原因,Android被踢出了Linux内核主线代码树中。大家想想,Android放在内核空间的驱动程序对硬件的支持是不完整的,把Linux内核移植到别的机器上去时,由于缺乏硬件抽象层的支持,硬件就完全不能用了,这也是为什么说Android是开放系统而不是开源系统的原因。 撇开这些争论,学习Android硬件抽象层,对理解整个Android整个系统,都是极其有用的,因为它从下到上涉及到了Android系统的硬件驱动层、硬件抽象层、运行时库和应用程序框架层等等,下面这个图阐述了硬件抽象层在Android系统中的位置,以及它和其它层的关系: 在学习Android硬件抽象层的过程中,我们将会学习如何在内核空间编写硬件驱动程序、如何在硬件抽象层中添加接口支持访问硬件、如何在系统启动时提供硬件访问服务以及如何编写JNI使得可以通过Java接口来访问硬件,而作为中间的一个小插曲,我们还将学习一下如何在Android系统中添加一个C可执行程序来访问硬件驱动程序。由于这是一个系统的学习过程,本人将分成六个章节来描述每一个学习过程,包括:
工业机器人新型开发软件介绍
工业机器人新型最新开发软件介绍
————————————————————————————————作者:————————————————————————————————日期:
MOTOMAN机器人新型最新开发软件介绍 发布日期:2013-02-03 编辑者:力生机械 随着全球工业化进程的不断推进,工业机器人已经在越来越多的行业发挥着举足轻重的作用。为了适应不断发展的工业需求,MOTOMAN机器人(力生机械)不断创新,不断完善,满足用户的多元化需求。 MOTOMAN机器人作为全球市场占有率领先的机器人,已广泛应用于社会生活各领域,尤以制造业为更多。一直以来,为广大MOTOMAN机器人用户所熟知的最新开发软件仅有Motocom32一种,虽然Motocom32功能强大,编程简单,但还是不能满足某些用户的特殊需求。尤其是大专院校、科研院所等,对机器人的应用,有更多的创新,对机器人最新开发功能要求也就更具多样性。 本文介绍了传统的Motocom32通讯软件和MOTOMAN机器人的两款新型最新开发软件,MotoPlus和Pendant customization。这两款新软件都是在机器人内部运行的,用户不需要了解机器人内部的原理或代码,就可以把自己编写的程序嵌入到机器人内,方便实现外部设备与机器人的数据交互,以及示教盒的客户化界面的编写。 传统的Motocom32介绍 Motocom32是在电脑上运行的,用于计算机与机器人控制柜之间进行数据传输的软件。计算机与控制柜之间可以使用RS232串口通信也可以使用以太网通信。该套软件,既提供现成的应用程序供用户使用,又提供动态链接库等文件供用户最新开发。只要具备基本的VC或VB知识就可以掌握最新开发方法,每一种功能都提供现成的函数供用户直接调用。用户通过这些函数,可以建立计算机与控制柜的通讯连接,可以读取机器人的当前信息和状态,可以实现对机器人的控制,启动指定的机器人程序,控制机器人的运动等。用户可以根据自己的不同需求,把对机器人的控制集成到自己的系统软件中或单独开发机器人监控软件。 图1为Motocom32在工业生产现场的应用示例。生产现场的机器人可以通过网线连入工厂的局域网内,在不同地方的PC都能通过Motocom32软件监测机器人生产状态和报警