架空输电线路机器人全自主巡检系统及示范应用
架空输电线路机器人全自主巡检系统及示范应用
Full Automatic Inspection System and Its DemonstrationApplication Based on Robot for Overhead Transmission Lines
彭向阳1,钱金菊1,吴功平2,麦晓明1,魏莱3,饶章权1
1.广东电网有限责任公司电力科学研究院,广州510080
2.武汉大学动力与机械学院,武汉430072
3.广东电网有限责任公司惠州供电公司,惠州516001
基金项目:南方电网公司重点科技项目(K-GD2014-0621);国家高技术研究发展计划(863计划)(2006AA04Z202);Project supported by Key Science and Technology Project of China Southern Power Grid Co;,Ltd;(K-GD2014-0621),National High-tech Research and Development Program of China(863Program)(2006AA04Z202);
摘要
机巡作业是当前电力巡检的主要发展方向,但与直升机、无人机以及变电站机器人相比,我国输电线路机器人巡检尚未达到实用化水平。为此,对输电线路机器人实用化巡检关键技术开展了研究,建立了机器人典型作业模式,研发了穿越式、跨越式两类巡检机器人,提出了机器人行走路径改造方法,首次设计了机器人自动上下线装置,并完成了机器人全自主巡检系统的研制。机器人通过了多种复杂自然环境和电磁环境工况的试验考核,以及户外真型线路试验段的功能测试,在500kV带电运行线路开展示范应用,对线路设备同时进行可见光和红外检测。巡检中暴露了巡检系统存在的问题并进行分析解决,提出了机器人异常情况下的紧急救援措施并成功开展带电救援作业。机器人单次巡检里程达到10km以上,巡检应用取得良好效果,机器人巡检系统达到一定的实用化水平。
关键词:架空输电线路;机器人;巡检系统;全自主巡检;机器人自主上下线;应急救援;示范应用;
DOI:10.13336/j.1003-6520.hve.20170731019
ABSTRACT
Robot inspecting is the main development direction of the electric inspection,but compared with helicopters,UAVs,and substation inspection robot,inspection robot for transmission lines in China has not yet reached a practical level.We studied the key technology of robot practical inspection for transmission line,and put forward several typical operation modes of robot inspecting.Moreover,we developed two kinds of inspection robot of robot to pass obstacles and robot to cross obstacles,and proposed a transformation method of robot walking path.For the first time,we designed the device of robot autonomous on-line and off-line, and implemented the development of independent inspection system of robot. The robot has got through a variety of complex nature,electromagnetic environment condition test and outdoor function test based on really line section, and has carried out the demonstrational application on500kV live operation line. The robot can carry out simultaneously visible light and infrared detection.In the inspection,the problems of inspection system are exposed and solved,the emergency rescue measures under the abnormal situation of the robot are put forward and carried out successfully.The robot has a single time inspection mileage of10km or more,and the inspection application has achieved good results,the robot inspection system has reached a certain practical level.
KEY WORDS:overhead transmission lines;robot;inspection system;full automatic inspection;robot autonomous on-line and off-line;emergency rescue;demonstration application;
0引言
我国地域辽阔,各地区的地理气候等自然环境差异较大,电力线路巡检经常需要经过高山、江河、湖泊地区,并且经常遭遇严重覆冰等自然灾害,使得电力线路巡检任务繁重和异常艰难。传统人工巡线存在工作量大、效率低、巡检准确度低且危险性高等缺点。随着我国电网规模增大,而相应运维资源、人力物力并未等比例提升,急切需要先进巡检手段提高电力线路巡检能力。
目前较先进的巡检手段主要有:直升机巡检、大型无人机巡检、中小型无人机巡检和智能机器人巡检等。有人直升机巡检效果好,但存在空域控制、巡检成本等因素,且巡检周期长,短则3月或6月一巡,长则1a一巡[1-2]。大型无人机巡检方面,南方电网实现了超低空、超视距复杂环境下大型无人机多传感器全自动巡检,仍在进行深化研究,在我国电网大范围开展实用化巡检仍需时间,且技术门槛相对较高[3-5]。小型无人机巡检因其机动灵活、携带方便,在一定程度上减轻了巡检人员工作量,在国家电网和南方电网已逐渐普及应用[6],但续航时间短,受巡检人员精神状态影响,不能长时飞行,限制了巡检距离,巡检时需要将无人机携带至所检杆塔附近才能飞行。
相比之下,输电线路机器人巡检虽然速度较慢,但是可以长时间在线巡检、多次重复巡检,且能适应跨越大范围林区、大面积水域以及其他复杂地理环境和交叉跨越环境的线路巡检,具有全自主巡检、无巡视盲区、巡视周期短、巡检费用低等显著优势,是输电线路智能巡检技术发展的重要方向[7]。
国外关于巡线机器人研究较早,代表性的有加拿大魁北克水电研究院及其研制的“LineScout”巡线机器人[8],日本东京大学与日本关西电力公司(KEPCO)共同研制的“Expliner”巡线机器人[9],美国电力研究院研发的巡检机器人“TI”等[10]。
国内巡线机器人研究始于20世纪90年代,取得了一系列技术成果,典型代表有:武汉大学及其研制的“LineBot”系列巡检机器人[11-12],中科院沈阳自动化所及其研制的巡检机器人等。由于线路巡检机器人具有良好的应用前景和技术特色,所以已成为智能机器人领域的研究热点。但从目前研究现状来看,国内外输电线路机器人巡检技术存在如下问题,有待进一步突破。1)线路机器人过塔能力较差。目前已有的大部分巡线机器人不能跨越杆塔,且采用“猿猴爬树”方式可靠性及效率较低,并且无法识别和通过防振锤等异形障碍物。
2)线路机器人上下线难度较大。目前巡检中普遍采用的带电作业吊装上下线方法存在耗时、耗力以及作业风险高等缺点,不利于应用推广,需要解决机器人自动上下线难题。
3)线路机器人巡视手段单一。出于载重量与可靠性考虑,目前线路巡检机器人大多仅搭载单一传感器,巡检效率较低,可扩展性差。
4)线路机器人尚未实现全自主巡检。全自主巡检需要机器人具备自主上下线、自主定位、自主识别障碍物和越障、自主巡检、自主充电等功能,但目前已有机器人巡检离不开频繁的人工干预。
本文针对架空输电线路机器人实用化巡检存在的上述关键问题展开研究,在对机器人全自主巡检功能需求分析的基础上,研发了沿架空输电线路地线行走的机器人及全自主巡检系统,介绍了巡检系统功能和结构组成,对智能巡检机器人、机器人自主上下线成套装置、地面监控基站、太阳能充电基站、巡检后台管理系统等5个分系统进行设计和研制,并在电网500kV 电压等级输电线路开展机器人全自主巡检应用,验证了机器人巡检系统的功能性能,巡检应用取得良好效果。
机器人全自主巡检即机器人在巡检起始杆塔自动上线,在巡检终止杆塔自动下线,均无需人工登塔辅助,由自动上下线装置实现机器人自主上下线;在沿架空地线巡检过程中,只需事先设置机器人巡检所需的线路参数和任务规划,在无需人工干预、无需更换电池的条件下,机器人进行自主巡检和自主充电,整个巡检过程自动进行,全部巡检任务机器人自主完成。
为实现机器人沿架空地线全自主巡检,提高巡检质量与巡检效率,降低巡检风险,所设计的机器人全自主巡检系统应满足以下功能。
1)机器人在巡检过程中需具备自主过塔能力,通过对架空地线进行必要改造后,机器人可以自主穿越防振锤、悬垂线夹等异形障碍,具备自主过塔巡检能力。
2)机器人采用自动上下线装置进行上下线作业,无需人工登塔辅助吊装,只需少量人员在地面辅助操作即可完成机器人上下线。
3)巡检系统应具有多传感器融合功能,系统具备采集及处理高分辨率可见光影像、红外视频影像、高精度3维激光点云数据模块,能依据巡检任务选择相应模块配置数据采集方式。4)巡检机器人应具有能耗监测与在线自动充电功能,通过在线充电和对能量进行有效管理,增强续航能力,增大巡检范围。
5)机器人应能进行自主巡检,具有导航定位能力,能获得精确定位信息;具有自动对准巡检目标能力,能克服行进中的振动干扰自动对焦,获得清晰影像数据。
6)巡检系统通讯模块应兼容多种通信策略,能够依据信号强度情况实时选择切换通信方式。为实现输电线路机器人全自主巡检系统功能需求,突破目前线路机器人巡检应用技术,研发了机器人全自主巡检系统。该巡检系统包括智能巡检机器人、地面监控基站、太阳能充电基站、自主上下线成套装置、巡检后台管理系统等5个部分,图1所示为机器人巡检系统的主要组成。
2.1智能巡检机器人
2.1.1机器人类型及作业方式
根据巡检需要,研制了2类沿地线巡检的机器人:穿越越障巡检机器人和跨越越障巡检机器人。前者在沿地线行走过程中,机器人行走末端执行器(行走轮)不脱离行走路径,且依次通过行走路径上的障碍物;后者在沿地线行走过程中,机器人行走末端执行器(行走轮)交替脱离行走路径,从行走路径上障碍物一端跨越障碍物到达另一端。
根据实际线路机器人巡检需求,建立以下3种典型作业方式。
1)档距巡检。一般不改造行走路径,无需跨越档距内防振锤的,可采用穿越巡检机器人;需跨越档距内防振锤的,可采用跨越巡检机器人。档距巡检,一般适用于大跨越段或重要交叉跨越段巡检,或对存在安全风险的特殊区段巡检。
2)耐张段巡检。一般不改造行走路径,可采用跨越巡检机器人;如采用穿越巡检机器人,则需对耐张段内地线防振锤及直线塔地线悬垂线夹进行改造。耐张段巡检,一般适用于对输电线路疑似故障区段或特殊区段进行故障巡检和特殊巡检。
3)多耐张段或全线巡检。一般需对行走路径进行改造,如采用穿越巡检机器人,则需对地线防振锤、直线塔地线悬垂线夹进行改造,并搭建耐张塔地线过桥结构;如采用跨越巡检机器人,则仅需搭建耐张塔地线过桥结构。
对架空输电线路全线或多个连续耐张段进行巡检时,为提高巡检效率,宜对全线行走路径进行改造,并采用穿越巡检机器人巡检。
2.1.2穿越巡检机器人及其线路改造
将地线上阻挡机器人通过的障碍物(如防振锤、悬垂线夹等)设计或改造为非阻挡型结构,在地线耐张塔头或猫头型塔头的两端增设过桥结构,机器人在地线上行走时,行走轮可直接滚动通过障碍物或杆塔,无需采取跨越越障方式,如图2所示。
对于直线塔悬垂线夹的改造,采用将金具原有挂板改为C型挂板的方式,对于光纤复合架空地线(OPGW)线路,由于线夹尺寸大,机器人行走轮无法在其上行走,故除改用C型挂板外,还需在C型挂板结构中增加1段道路以供机器人行走,并用铰结构确保该过桥适应各种不同的坡度,双悬垂线夹的改造也类似,如图3所示。
对于耐张塔的地线耐张结构及其横担改造为在塔头上增设1段“耐张过桥”供机器人行走。耐张过桥结构整体分为4段,分别为直线段、变曲率段(即柔性结构)、金具固定结构以及与地线搭接段,如图4所示。
2.1.3跨越巡检机器人及其线路改造
当机器人遇到障碍物时,采用双臂交替错臂跨越障碍物的方式,从障碍物的一侧到达障碍物的另一侧,如图5所示。
与穿越巡检机器人相比,跨越巡检机器人无需对防振锤、悬垂线夹进行改造,对阻挡机器人通过
1机器人全自主巡检系统组成Fig.1Composition of robot autonomous inspection system
Fig.2Robot to pass obstacles
图3穿越巡检机器人悬垂线夹改造Fig.3Reconstruction of suspension clamp for robot to pass obstacles
图4穿越巡检机器人耐张过桥改造Fig.4 Reconstruction ofstrain tower for robot to pass obstacles
的地线耐张塔头及猫头型塔头,仍需在其两侧增设过桥,过桥与地线的连接处仍然采用跨越越障方式。同时,需要对防振锤的布置提出一些要求,来保证机器人顺利越障,总体改造方案如图6所示。
2.1.4巡检机器人分系统研制
巡检机器人由机械系统、运动控制系统、电源监控与管理系统、通信系统、多源信息融合的导航定位系统、多任务载荷系统等分系统组成[13-14]。
1)机械系统。机械系统负责机器人行走与越障动作。穿越巡检机器人机械系统主要由行走机构、压紧机构、锁臂/松臂机构、滑台机构等构型组成。该构型可供穿越巡检机器人直线运动与过桥运动:两臂悬挂时,主动轮上行走机构带动机器人在导线上运行;为防止滚动行驶时的打滑现象,压紧机构压紧使主动轮与压紧轮相对压紧将力作用在导线上,提高压紧力;当导线坡度较大时,压紧机构通过补夹将单臂固定在导线上,通过滑台机构收缩两臂,蠕动移动;直线运动过程中锁臂/松臂机构锁紧控制回转关节固定,当运行路线有一定曲率时,锁臂/松臂机构松开使回转关节可以有一定摆动幅度,保证机器手臂与运行路线的相对位置关系,配合前面移动动作实现变曲率路径上的前行。
2)运动控制系统。运动控制系统负责对机器人行走过程速度和位置进行控制。由于对行走轮的控制精度要求比较高,需要实时控制速度以防止打
5跨越巡检机器人Fig.5 Robot to cross obstacles
图6跨越巡检机器人耐张塔头改造Fig.6Reconstruction ofstrain tower for robot to cross obstacles
滑,因此,行走轮电机选用控制性能较好的直流有刷电机,并且在电机端部安装有脉冲编码器,以实时准确地检测速度反馈。在压紧轮轴端,安装了自制的编码器,用于检测机器人行走打滑;在2个压紧轮支架上,还分别安装2个超声波测距传感器,用于检测机器人相对于障碍物的距离。所有电机、减速器、编码器、制动器及其电缆、限位开关传感器及其电缆等,均嵌装在机械结构中。
3)电源监控与管理系统。机器人采用单一电源供电,电源监控管理系统的主要功能为负责对机器人工作过程中的电源电压和电流变化进行监控,对剩余电量进行预估计,并对机器人搭载设备进行能量管理。同时在充电对接完成后,通过传感器检测电信号,检测电流以及充电过程中电流的变化,以便对充电过程进行控制,充电完成后控制机器人充电头离开充电座。电源监控与管理系统采用能耗预测及其控制策略,该策略分为2个部分:①是根据锂电池放电曲线以及剩余电量函数预估出机器人剩余电量;②是根据线路能耗模型分别计算出机器人各部分以及线路各部分能耗情况,根据剩余电量预测续航里程及时间。
4)通信系统。通信系统负责机器人本体设备与地面基站、太阳能充电基站的通信和数据传输。机器人本体设备搭载WiFi、4G和GPRS这3种通信装置,与地面基站间采用3种通信模式:本体设备与地面基站由WiFi载波构成有线和无线混合通信;本体设备与地面基站直接通过4G公网通信;本体设备与地面基站直接通过GPRS公网通信。在上述通信模式中,机器
人本体设备始终在检测第1种通信模式,且位于最高级,当第1种通信模式不成立,执行第2或第3种通信模式时,在WiFi断接期间巡视图像将存储在机器人本体设备中,而当WiFi链接有效时再实施传输。机器人本体与太阳能充电基站采用有线通信,并利用机器人行走的铝包钢绞线进行载波通信。
5)多源信息融合的导航定位系统。导航定位系统负责确定机器人运行时相对上一级杆塔某个初始定位点的空间位置及姿态。该系统主要利用行走轮编码器、压紧轮霍尔计数器、倾角传感器,运行过程中获取信息数据,结合数据库信息及运行前设置的规划,判断处理以获取到运行过程中实时的空间位置及姿态。利用该系统可以确定机器人实时位置,并且可以实现自主巡检。
6)多任务载荷系统。多任务载荷系统可满足高压、超特高压电力线路日常安全维护等业务的高效、自动化处理要求,并考虑多源数据互补和融合特性,包括全景可见光、红外热成像、激光扫描等3个子系统。如图7所示。该系统采集和处理包括高分辨率可见光影像、红外视频影像、高精度3维激光点云多源数据,使机器人能够发现输电线路可见光缺陷,实现对输电设备红外测温,并具有较高精度的几何定位能力,能满足架空输电线路巡检故障诊断作业的任务需求。
2.2地面监控基站
地面监控基站实时接收机器人运行状态信息,发送地面遥控指令,接收并保存巡检图像与数据,对机器人本体进行视频监控,同时还负责对太阳能充电基站的监控。地面监控基站为车载或人工携带的地面移动监控操作平台,主要由电源系统、控制系统和通信系统组成,如图8所示。地面监控基站的关键技术有多信道通信技术、任务规划与实时监控技术、能耗预测与预警技术等。
1)多信道通信技术。机器人与地面监控基站
图7多任务载荷系统Fig.7 Multi-task load system
图8地面监控基站系统框图Fig.8Composition diagramof ground control station
间采用的通信策略为WiFi、GPRS和4G通信这3种方式兼容,能实时监控各信号强度,依据情况自动切换至可靠信道,能满足不同环境通信需求。无线路由器信号通过信号放大器增强后传输距离大幅增加,采用WiFi通信时,在无阻挡条件下能实现5km距离远程控制。在
2G/3G信号覆盖情况时,GPRS通信不受距离限制。有4G信号覆盖情况,4G通信不受距离限制。
2)任务规划与实时监控技术。通过后台管理系统制定巡检任务规划,输入机器人巡视规划所需线路参数,机器人即可进行自主巡检,通过数据采集和通信,获取巡检机器人位置、姿态等信
息,并发出指令遥控机器人动作。同时,接收机器人巡检过程传递的图像和视频数据,完成对整个巡检过程的实时监控。
3)能耗预测与预警技术。接收机器人上电源监控与管理系统监控的电量信息,根据理论建模计算得到基于线路工况参数(如杆塔水平档距、高差等)的理论能耗,并结合监控得到当前机器人位置信息,通过计算做出机器人的能耗预测,包括续航里程、续航时间、目标杆塔等信息。该技术为机器人全自主巡检系统安排巡检作业计划和充电位置选择提供参考。
2.3太阳能充电基站
太阳能充电基站安装在杆塔上,实现对机器人自主在线充电,基站系统由太阳能电源、充电控制箱、储能蓄电池、充电对接装置及远程控制系统等组成[15-16],如图9所示。
1)系统功能。充电基站功能主要分为3个部分:首先,太阳能电源向储能蓄电池充电。此过程通过系统将太阳能转化为电能存入储能蓄电池。其次,储能蓄电池向机器人锂电池充电。当机器人与充电座对接成功时,控制储能蓄电池向机器人锂电池充电。最后,基站与机器人之间进行实时通信。远程监控软件可监控太阳能电源向储能蓄电池充电及储能蓄电池向机器人锂电池充电的整个过程。
2)充电过程。当机器人运行到充电基站杆塔处时,由机器人自主实现充电头和充电座的自主对接充电及其充电自动监控,充电完成后,机器人与充电座自主分离,并自主执行巡检任务。太阳能充电基站结构如图10所示。
2.4自动上下线装置
研发的自动上下线成套装置无需人员登塔作业,仅需少量人员在地面辅助即可完成机器人自主上下线。该装置主要由起吊篮、垂直导轨、引导导轨、绝缘绳、卷扬机组成。其中,卷扬机安装在杆塔底部的塔身上,工字钢垂直导轨分段拼接而成,沿着杆塔塔身一侧延伸至塔头;起吊滑轮和引导导轨固定在塔头支撑架上,如图11所示。
机器人自主上下线作业流程如下:通过卷扬机牵引连接在吊篮上的钢丝绳,装载机器人的吊篮沿工字钢导轨从地面移动至塔头引导导轨处,吊篮导轨和引导导轨通过“喇叭口”形式的导轨对接装置形成完整的进入地线导轨,使机器人沿着引导导轨前进进入地线,如图12所示。机器人下线与上线作业流程相反。
对不同类型的耐张塔或者转角塔,上下线装置只需根据不同的塔头结构设计不同的引导导轨支撑装置,就能适应不同类型的杆塔。因此,本套装置具有一定的普适性。
2.5巡检后台管理系统
巡检后台管理系统是一套计算机管理软件,主
9太阳能充电基站系统框图Fig.9 System diagram of solar charging station
图10太阳能充电基站结构图Fig.10Structure chart of solar charging station
图11自动上下线装置结构Fig.11Automatic installing/uninstalling device
要负责任务规划、提供巡检作业方案、对线路参数信息和巡检结果进行管理、进行巡检结果分析及缺陷诊断、生成巡检报告等。软件既可安装于地面监控基站计算机,又可安装于远程服务器或其他任意1台计算机。系统主要包含线路管理、设备管理、巡检管理、诊断管理、巡检报表和系统管理等子系统,系统功能结构如图13所示。
3巡检系统检验测试及巡检应用
3.1机器人环境工况测试
为考核机器人巡检过程中抗风能力,在中国航天空气动力研究院流体动力检测中心进行了风载试验,机器人通过风力为10级、风速为24.5m/s、持续时间为2min的风载试验;为考核机器人巡检过程中抗雨能力,在中国船舶工业机电产品环境与可靠性检测中心进行了淋雨试验,机器人通过了IPX3(体积流量为10L/min、持续时间为30min)、IPX5(体积流量为12.5L/min、持续时间为10min)这2个防水等级的淋雨试验;为考核机器人电磁兼容性能,在电力工业电气设备质量检验测试中心进行了C级静电放电抗扰度和A级射频电磁场辐射抗扰度、脉冲磁场抗扰度、工频磁场抗扰度试验,试验通过;为考核机器人耐受机械振动及环境气候性能,在中航工业环境与可靠性实验室进行了运输振动、XYZ这3个轴的整机振动及60℃高温、-25℃的低温试验,试验通过。
3.2巡检系统功能测试
为检验机器人巡检系统功能性能,搭建了户外输电线路试验段,通过机器人越障试验和爬坡试验,测试机器人的路径通过性、适应性和爬坡能力,并测试地面监控基站、自动上下线装置、太阳能充电基站、巡检后台管理系统的功能。
先后测试了机器人通过耐张塔过桥、悬垂线夹、防振锤等异形障碍,以及搭载激光扫描仪或红外热成像仪的爬坡性能。真型线路测试证明,机器人可以平稳通过耐张过桥、单联线夹、
双联线夹、防振锤等障碍物,搭载激光扫描仪/红外热成像仪时爬坡能力可达30°,巡检系统能够进行全自主巡检。
3.3巡检系统示范应用
为检验机器人巡检系统在实际带电运行线路的巡检能力,在500kV电压等级惠茅乙线进行了示范应用。该次巡检选择巡检区段为N91塔至N105塔,巡检区段全长为5.4km,共15基杆塔。机器
12机器人自主上线过程Fig.12Robot automatic installing
13巡检后台管理系统功能结构图Fig.13Functional chart of backstage management and inspection system
人行走的地线型号为LGJ-95/55,前期已对地线进行了适应改造,可供穿越式巡检机器人高效行走。
巡检方案:选择N105耐张塔为机器人上下线杆塔,搭建机器人自动上下线装置,在N92直线塔安装太阳能充电基站,机器人从N105耐张塔自主上线,往小号侧巡检至N91耐张塔,折返巡检至N92杆塔进行自主充电,充电完成继续向大号侧巡检,巡检至N105塔自主下线。整个往返巡检过程中,来回要穿越2基耐张塔、2级双联悬垂直线塔、24基单联悬垂直线塔,总巡检里程为10.8km。
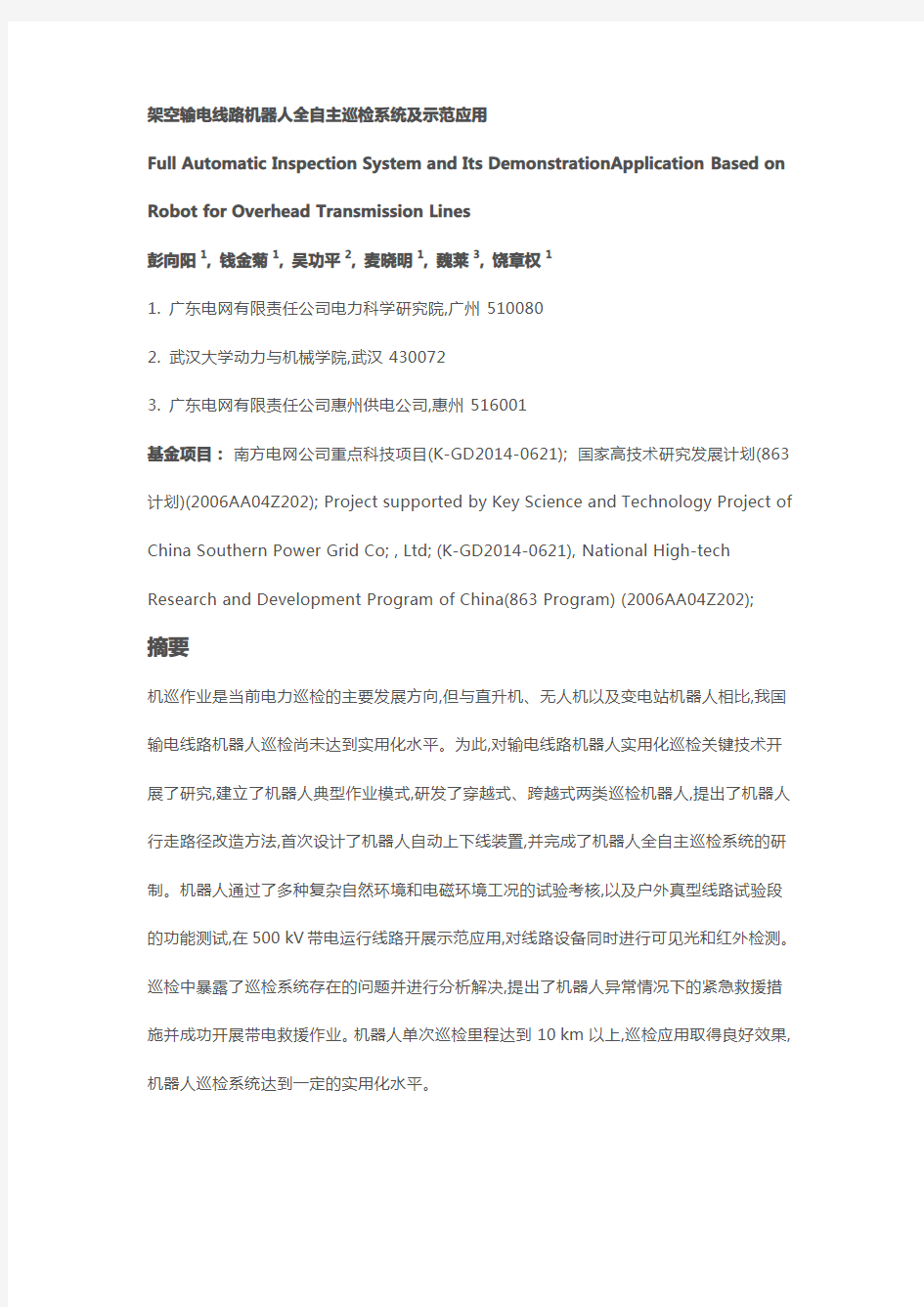
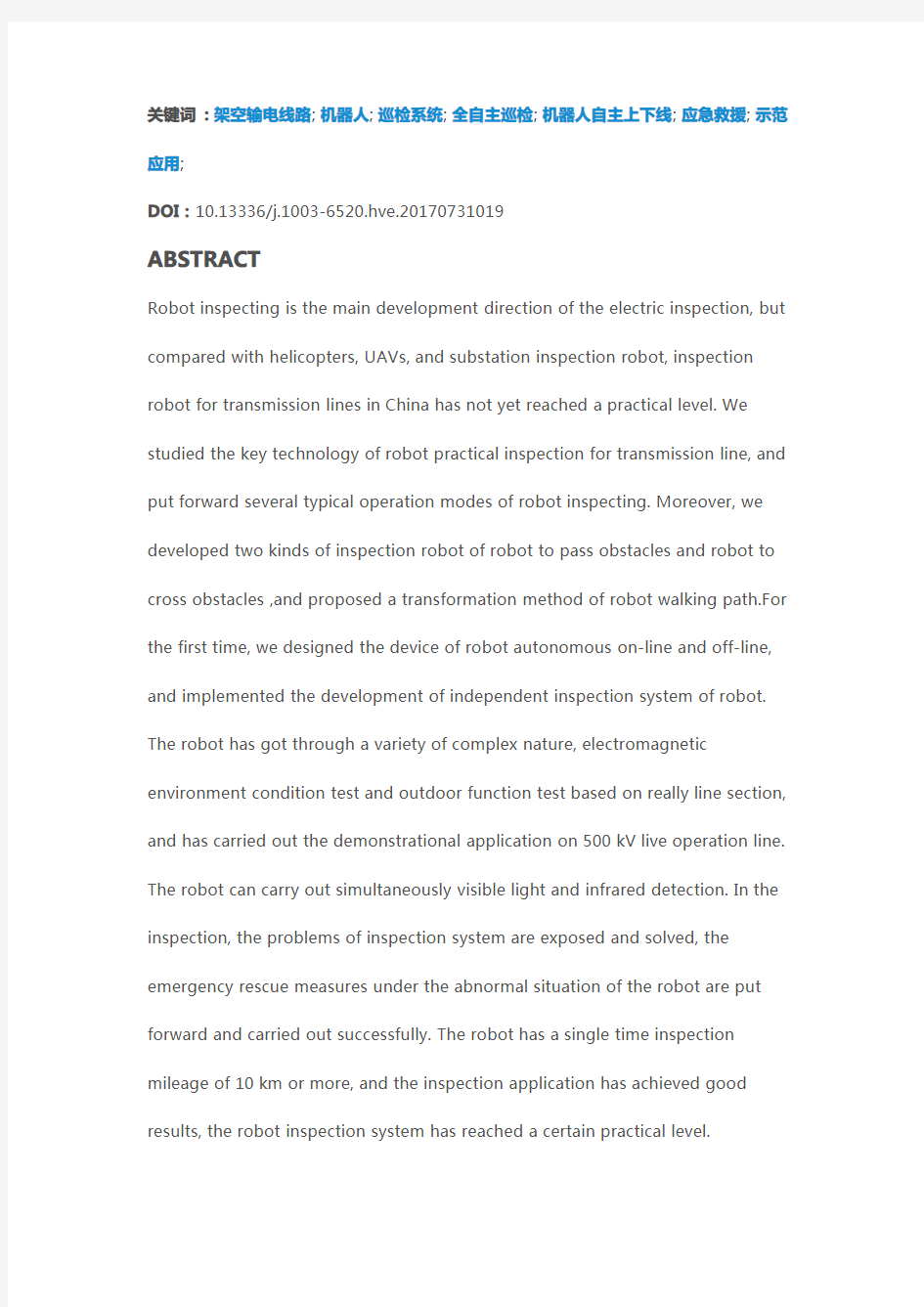
利用机器人搭载的可见光摄像机和红外热成像仪,对500kV电压等级惠茅乙线巡检区段内导线、绝缘子及金具进行可见光和红外检测,图14为绝缘子、金具和导线的红外检测图像,图15、图16分别为绝缘子、金具可见光检测图像。
与直升机、无人机巡检相比,沿地线行走机器人与线路设备距离更近,采集的可见光、红外图像更清晰、效果更好,巡检目标可以涵盖线路导地线、绝缘子、金具以及其他线路设备和通道状况[17-18]。巡检过程中,可以对目标进行长时间、多角度观测,可以在通过杆塔前后对同一设备进行前后观测,可以根据输电线路正常巡检、故障巡检及特殊巡检需求,确定合适的巡检方式。
3.4巡检试验发现的问题
在户外真型线路测试及500kV电压等级惠茅乙线适应性巡检试验中,也暴露出机器人存在的一些问题。
1)电源异常中断。巡检试验中发生2次机器人断电失去连接现象,检查机器人状态数据发现断电前电源电流均增大至10A以上,因电流过大而导致保护回路熔断(阈值为10A),开关自锁失效而断电。原因是设计时对机器人在不同工况和搭载不同传感器负载下的电源功率估计不足,通过重新设计及改造解决了此问题。
2)上下线及行走路径卡阻。由于机器人自动上下线轨道设计不良、安装不当,以及直线塔悬垂线夹机器人穿越间隙裕度不足,导致机器人自动上下线及穿越C型悬垂线夹时发生卡阻,后进行重新加工及安装解决了此问题,积累了施工经验。
3)部件锈蚀问题。由于巡检试验及故障处理需要,机器人单次最长连续在带电线路户外停留近1月,回收机器人后检查发现,机器人少部分装配螺栓、电源及通信连接插座、机械臂等部件存在不同程度锈蚀,主要与部件防锈性能及密封不良有关,通过重新选型解决此问题。3.5异常情况的处理
3.5.1一般情况
1)天气突然变化。巡检中遇到突发大风、暴雨、沙尘暴等恶劣气象变化,机器人应立即中止作业,并执行安全保护操作,确保安全。
2)任务规划异常。巡检中发现地线严重断股,或行走路径倾角与任务规划相差很大时,应立即中止巡检任务,操控机器人返回到最近的杆塔处停止移动,并执行安保策略。
3)电池电量不足。巡检中电池电量不足或设备异常告警时,应立即中止巡检任务,并操控机器人到最近杆塔处停止移动。
4)通讯中断。自主巡检时,若地面监控基站与机器人通讯中断无法恢复,则应根据通讯中断前最后地理坐标或机载追踪器发送的报文等信息,及时查找定位机器人。
3.5.2极端情况
机器人巡检过程中发生不可自动恢复的紧急故障导致机器人停留在档中区域,此时应立即中止
图14绝缘子和金具的红外检测Fig.14 Infrareddetectionof insulators and hardwares
图15绝缘子的可见光检测Fig.15Visible light detection of insulators
无人机红外热像仪电力巡检
无人机载红外热像仪高压电力巡检 整体解决方案
目录 一、行业背景 (2) 1、2015年将推广协同巡检模式 (2) 2、无人机精细巡检 (3) 二、行业需求 (3) 三、系统介绍 (4) 1、无人机 (4) 2、红外热像仪 (5) 3、无人机载红外热像仪 (5) 四、业务分析 (6) 1、传统巡线图示 (6) 2、无人机搭载红外热像仪电力巡线解决方案 (6) 3、无人机搭载红外热像仪电力巡线方案优势分析 (7) 4、无人机巡航作业的优势: (9) 5、无人机巡航效益分析 (9) 6、结论 (10)
一、行业背景 我国目前已形成华北、东北、华东、华中、西北和南方电网共6个跨省区电网;110 kV以上输电线路已达到近51.4万km。根据相关数据表明,我国每年电力行业整体投资约为1000亿元,其中硬件设施为73%,说明输电设备在国家电网建设上比重越来越大,随着电网的日益扩大,巡线的工作量也日益加大,100km 的巡线工作需要20个巡线人员工作一天才能完成。因此传统的巡线方式已经满足不了现代电力系统的广泛需求。 1、2015年将推广协同巡检模式 国网已明确的未来巡检模式,亦为无人机留下了发挥作用的广阔空间。 去年3月,国网公司运维检修部召开的工作推进会指出,到2015年,国家电网公司系统将全面推广直升机、无人机和人工巡检相互协同的输电线路新型巡检模式,全面提高巡检作业效率和效益,保障大电网安全运行。 根据此次会议,山东、冀北、山西、湖北、四川、重庆、浙江、福建、辽宁、青海共10个单位将作为试点,要求利用2013—2014年两年时间开展新型巡检模式试点工作,于2015年总结试点经验,完善标准体系,全面推广实施。 据了解,按照巡检业务界面划分,直升机可开展线路常规巡视和状态巡视、灾情普查和应急抢险等工作,巡检对象主要为特高压、跨区直流和500千伏及以上重要线路。大、中型无人直升机应用于220千伏及以上交直流线路开展常规巡视和状态巡视;小型无人直升机应用于110千伏及以上线路单塔进行巡视、故障巡视和小范围通道巡查;固定翼无人机一般用于500千伏及以上线路开展通道巡视和灾后电网评估等。人工巡检主要对管辖范围内输电线路开展状态巡视、日常维护及检测等,在直升机、无人机巡检作业覆盖范围内,修订有关规程,以减少巡视次数。
基于四旋翼无人机的输电线路巡检系统研究_王振华
收稿日期:2012-07-10 基金项目:国家自然科学基金资助项目(60674100);博士点基金资助项目(20113218110013);江苏省产学研联合创新资助项目 (BY2012018) 作者简介:王振华(1987—),男,江苏江阴人,硕士研究生,从事飞行控制理论、嵌入式系统开发研究。 E-mail:wzh_nuaa@https://www.360docs.net/doc/ed14137788.html, 护主要依靠日常巡检及故障发生后的继电保护、稳定控制和失步解列等“三道防线”,而对电网运行的主动监测、主动防护相对落后。提前获知灾害的形成过程,主动清除各类缺陷和隐患,为“坚强”、“自愈”的智能电网安全提供了强有力 的保障。 目前输电线路的巡检手段主要为人工巡检。然而受到自然条件、巡检设备落后的制约,人工巡检存在着诸多问题。而传统的自动化巡检载体,如线路本体在线监测系统[2]、线路攀爬巡检机器人[3-4]等,因其巡检覆盖范围小,操作难度大,不利于维护等原因,正逐步退出历史舞台。随着航空工业技术的发展,飞行器巡检正逐步成为一项新的研究课题。其非接触式、快速高效、多角度全方位的巡检手段,搭配各类可见光和红外影像设备,能够全面了解输电线路的运行情况,给影像信息的获取,上述的飞行平台还不能完全满足要求。 1四旋翼无人机巡检系统 南京航空航天大学和南京工程学院组成的研 究团队,在调研输电线路短途目视巡检需求的基础上,研制了四旋翼无人机巡检系统。其飞行器本体机械结构简单,旋翼尺寸较小(潜在危害性小,运行风险低),具有重量轻、易携带、易操控、可悬停、效率高、无污染、易维护等优点,能够快速机动地执行巡检任务。 巡检系统采用编码正交频分复用(coded orthogonal frequency division multiplexing,COFDM ) 图像传输机制[9]实时传输输电线路部件的影像信息,通过手持式或地面站式遥控设备,进行全方
巡检机器人的调研报告
上海电力学院 关于巡检机器人的调研报告 院(系部)自动化工程学院 专业名称: 电机与电器 学生姓名: 杨雪莹 导师: 薛阳 2013 年 12 月
目录 1 巡检机器人的发展状况........................... 错误!未定义书签。 2 巡检机器人的应用............................... 错误!未定义书签。 高压线路巡检机器人.......................... 错误!未定义书签。 机器人仿真.............................. 错误!未定义书签。 巡检机器人越障.......................... 错误!未定义书签。 变电站巡检机器人............................ 错误!未定义书签。 校园巡逻机器人.............................. 错误!未定义书签。 3 总结 .......................................... 错误!未定义书签。参考文献 ........................................ 错误!未定义书签。
1 巡检机器人的发展状况 目前巡检机器人已在多个领域中应用,它的智能化推动着它在应用领域的市场前景将是越来越广,尤其是在电力行业。它在多种场合发挥着作用,如变电站,高压线路中等等。 2013年12月9号中山供电局经过三个多月的试运行,该局将“智能巡检机器人”正式投入到500千伏桂山巡维中心使用,开创南方电网公司首例无轨化设备巡视工作。传统的机器人需要铺设类似于火车轨道那样的磁轨,机器人就只能沿着磁轨作运动。而最新投入使用的机器人实现了无轨化运作,不需要铺设任何轨道,也无需进行任何基建工程,机器人就可以直接在日常的路面上运作,既省下基建施工的时间,又节约了投入成本。凭靠机器人配备的四驱越野底盘,还可以爬上30度的陡坡。该机器人上配备了激光扫描设备,可将站内的设备位置,道路扫描为地图,我们在后台为它规划好巡视路径后,它就可以按照指示去工作了。 机器人巡线最大的优点则是,无论白天黑夜还是刮风下雨,它都可以在没有人看管的情况下能自动自觉并出色完成一般日常巡视所包含的工作内容。这样一来,机器人不但减轻了工作量,而且在遇到严重故障或者恶劣天气时,它还可以降低工作人员的安全风险。 智能机器人还具有自动续航功能,当蓄电池电量低于设定值时,它将自动驶入存放室进行充电。据悉,中山供电局通过对智能巡检机器人进行了三个月的试用,已经收到不错的成效。此次正式投入使用,在南方电网公司尚属首例。 2013年11月11日上午,在国家知识产权局与世界知识产权组织举办的第十五届中国专利奖颁奖大会上,由国网山东电力科学研究院申报的外观专利“变电站巡检机器人”荣获外观专利金奖,成为5个金奖之一。这是国家电网公司历史上获得的第一个中国外观专利金奖,也是中国电力行业惟一当选的金奖。 变电站巡检机器人能够全天候全方位全自主对变电站设备进行无人值守巡检,从而代替繁重的变电站设备人工巡检,提高了变电站巡检的自动化、智能化水平,确保了智能电网的安全可靠运行。 该变电站巡检机器人产品外壳采用无污染、抗冲击、高绝缘的ABS树脂材料,具有较好的环保性和安全性;产品外观采用了“仿人”化创新性设计,整体颜色融合变电站“环境”因素,同时配以红色的机器人颈部绕圈与多色的告警指示灯
输电线路在线监测系统
目录 TLMS系列输电线路在线监测系统 (2) 一、TLMS-1000 输电线路图像/视频在线监测系统 (3) 二、TLMS-2000输电线路气象在线监测系统 (4) 三、TLMS-3000输电线路导线温度在线监测系统 (5) 四、TLMS-4000 输电线路杆塔倾斜在线监测系统 (6) 五、TLMS-5000 输电线路覆冰在线监测系统 (7) 六、TLMS-6000 输电线路风偏在线监测系统 (8) 七、TLMS-7000 输电线路导线舞动在线监测系统 (9) 八、TLMS-8000 输电线路微风振动在线监测系统 (10) 九、TLMS-9000 输电线路导线弧垂在线监测系统 (11) 十、TLMS-1100 输电线路绝缘子污秽在线监测系统 (12)
TLMS系列输电线路在线监测系统 系统简介: “TLMS系列输电线路在线监测系统”,是基于无线(GPRS/GSM/CDMA/3G)数据传输、采用多种传感器、红外网络高速球机、太阳能供电,实现对高压输变电线路/塔杆情况进行全天实时监测和监控。本系统适用于野外无人职守的高压输电线路、电力铁塔的安全监控。 系统原理示意图: 系统组成: 输电线路在线监测系统包含以下子系统: 输电线路图像/视频在线监测系统、输电线路气象在线监测系统、输电线路导线温度在线监测系统、输电线路杆塔倾斜在线监测系统、输电线路覆冰在线监测系统、输电线路风偏在线监测系统、输电线路导线舞动在线监测系统、输电线路微风振动在线监测系统、输电线路导线弧垂在线监测系统、输电线路绝缘子污秽在线监测等系统。 产品特点: 1.支持3G/GPRS/CDMA网络,通信方式灵活; 2.采用太阳能供电系统供电,安装维护方便; 3.采用工业级产品设计,适合恶劣环境下工作; 4.具有检点自启动、在线自诊断功能; 5.具有数据采集、测量和通信功能,将测量结果传输到后端综合分析软件系统; 6.系统运行参数、报警参数、数据采集密度等可以远程设置; 7.具有数据存储、历史数据查询、报表、打印、曲线图绘制等功能; 8.具有自动分析报警提示值班人员功能;
输电线路无人机巡检技术的应用与分析
输电线路无人机巡检技术的应用与分析 摘要:输电线路巡检是管理电力线路的核心工作,为保障人民的生活和生产用电,电网公司要定期对电力线路进行一系列精细化的巡视,及时发现缺陷,消除 隐患。现阶段的电力巡检系统满足了地面上的隐患排查、数据采集工作,但对于 高空带电部位的缺陷排查工作难度大,隐患不易发现。在科学技术的发展下我国 的无人机技术已经逐渐成熟,开始逐渐运用在实际生产过程中,无人机巡检是目 前输电线路智能化应用手段之一,不仅减少了人力的消耗,也提高了排查故障的 效率。满足了电网对信息化及自动化的需求。 关键词:无人机;输电线路;线路巡检 1输电线路巡检 输电线路巡检主要对输电线路进行定期巡视检查,随时掌握和了解输电线路 的运行情况以及线路周围环境和线路保护区的变化情况,发现存在的安全隐患及 时处理,保证用电安全。人工巡检是一种传统的巡检方式,也是目前输电线路巡 检的主要方式,满足了地面上的隐患排查、采集工作,但地面观察存在一定的漏洞,对于高空部位缺陷、带电部位缺陷及隐患不易发现,会造成某些安全隐患的 漏查,输电线路的运行情况得不到及时反馈。传统的巡检方式已经暴露出相当大 的弊端,远远落后于国家电力的高速发展。 2无人机巡检技术在输电线路中的应用 无人机巡检作为一种使用可见光及红外热像仪等巡检设备对输电线路进行巡 视检查的全新巡检技术,具有迅速快捷、工作效率高、不受地域影响、巡检质量高、安全性高等优点。据统计,运用无人机进行缺陷识别,杆塔瓶口及以上位置、人工难以发现的缺陷占比78.5%。设备本体巡检效率和质量显著提高,并且极大 降低了劳动强度,提升了巡检效率,确保了对电力设备状态的运行维护能力。因此,无人机巡检已成为输电线路运维不可或缺的手段。 而未来几年的发展趋势中,将实现无人机巡检100%覆盖所有输电线路,输 电线路无人机巡检管控系统100%覆盖所有运维单位,推动人工智能技术在无人 机系统领域的融合应用。使无人机具备智能控制、整合空域和适应环境的能力, 能够协同指挥控制、协同态势生成与评估,协同语意交互,同时利用智能算法对 收集的语音、文字和图像等信息进行智能分析,实现人工智能与无人机的共同发展。 3无人机巡检的优势与不足 3.1降低了巡检人员的工作风险,提高了巡检效率 在使用无人机之前,工作人员在巡检会有高空任务或带电作业任务,对于工 作人员来说具有一定的危险性。借助无人机,减少了作业人员高空危险作业的同时,提高了巡检的质量,及时反馈准确高效的信息,并对输电线路进行全方位立 体化的安全巡查,且在恶劣的地形环境或恶劣的天气状况下也可以安排巡检。使 用无人机之后降低了人员消耗的成本,提高输电线巡检的工作效果,同时保障了 公众的用电稳定安全。 除正常巡检和特殊巡检外,还可将无人机应用在电网灾后故障巡检。当灾害 导致道路受阻、人员无法巡检时,无人机可以发挥替代作用,开展输电线路巡查,准确定位杆塔、线路故障,且视角更广,能避免“盲点”。无人机巡检提高了电力 维护和检修的速度和效率,使许多工作能在设备带电情况下迅速完成,较人工巡 检效率高出数倍。
输电线路振动在线监测系统设计方案.
输电线路振动在线监测系统设计方案 目录 1.项目的必要性 (2) 2.主要内容 (3) 2.1 监测方式和内容 (3) 2.1.1监测方式 (3) 2.1.2监测内容 (3) 2.2 监测装置安装位置 (3) 2.2.1安装原则 (3) 2.2.2安装位置 (3) 3.技术方案 (3) 3.1 系统结构原理图 (3) 3.2 监测系统组成及运行环境 (5) 3.2.1监测装置 (5) 3.2.2系统软件 (5) 3.3 主要技术参数 (5) 3.4 监测系统特点 (7) 3.4.1监测装置特点 (7) 3.4.2 综合分析软件系统特点 (7) 3.5 监测系统通信、供电和运行方式 (8) 3.5.1 通信方式 (8) 3.5.2 供电方式 (8) 3.5.3 运行方式 (8) 4.项目意义 (8)
1.项目的必要性 架空线微风振动是一种气体的旋涡(卡门旋涡)在架空线背风侧交替脱落所产生的架空线振动现象,其特征频率高(3-120Hz),振幅一般不会超过导线直径,振动频率和风速、导线直径有关,由式:F=200V/d确定,其中V为垂直于架空线的风速,单位:米/秒, d为架空线导线直径,单位:米。 目前几乎所有的高压送电线路都受到微风振动的影响,尤其在线路大跨越上,因具有档距大、悬挂点高和水域开阔等特点,使风输给导地线的振动能量大大增加,导地线振动强度远较普通档距严重。一旦发生疲劳断股,将给电网安全运行带来严重危害,通常仅换线工程本身的直接损失可高达数百万元。现在世界上任何地区,几乎所有的高压架空送电线路都受到微风振动的影响和威胁,在我国微风振动危害线路的事例也很普遍。微风振动已经严重威胁着我国电网架空送电线路特别是大跨越的安全运行。 通过迅速准确地采集、传输、处理和管理线路大跨越振动的大量数据和信息,及时掌握导地线防振装置消振效果的变化,可以为输电线路大跨越的安全运行提供实时预警服务,避免现行预防性计划维修(计划修)制度维修不及时或过度维修的弱点,变预防性计划维修为状态维修,能够显著提高输电线路设备的运行可靠性并降低维修费用。 微风振动对架空线路造成的破坏是长期积累的,具有较强的隐蔽性,因此对其进行测量既能消除微风振动产生的隐患,又能为防振设计提供科学的依据。
无人机在输电线路巡检中的应用
无人机在输电线路巡检中的应用 随着电力电网产业飞速发展,各种输电线路的分布日益广泛,输电线路巡检的工作量日益加大。然而,由于中国国土辽阔,输电线路所处的地形复杂多样,传统输电线路巡检技术由于各自的缺陷而不能有效满足巡檢要求,这些巡检技术的不足促进了无人机输电线路巡检技术的出现和发展。针对无人机线路巡检技术的研究已经成为了电网巡检和无人机应用领域的一个研究热点,这一方面的研究也取得了很多研究成果,然而尚缺乏关于无人机输电线路巡检方面的详细介绍。 标签:无人机;输电线路巡检;应用 通常情况在输电电路都会分布在荒凉的地方,而且所处地方地形地貌都比较的复杂。相关工作人员对输电线路进行人工的巡检的时候会遇到诸多的问题,输电线路在正常的运行过程中难免会受到人为因素及自然环境的影响,这样必定会严重的损害输电线路,使其整个电力系统的正常稳定运行受到较大的影响。 一、在输电线路巡检中运用无人机的优势及不足 (一)输电线路巡检中运用无人机的优势 自主悬停技术及自定导航飞行技术是无人机技术的基础,其具有输电线路防碰撞保护能力,在灾害性及恶劣的天气中有着输电线路灾害分析、查找手段输电电路跳闸故障点以及检测及巡视输电线路故障点等方面具有非常明显的优势。 (二)无人机存在的不足 即便在输电线路巡检过程中无人机占有一定的优势,可是其中也留下很多不足之处。比如说,无人机的巡航时间是比较短的,因为无人机的体积较小,使其自身的电容容量相对比较小,这样就会在很大程度上影响其巡航时间。 二、无人机巡检内容及作业方式 (一)无人机巡检内容 无人机巡检主要包含正常巡检、故障巡检、特属巡检等内容。正常巡检时,主要应用无人机巡检系统对输电线路导线、绝缘子、附属设施、线路走廊等进行常规性检查;故障巡检时,根据故障信息,应用无人机巡检系统确定重点巡检区段和部位,查找故障点及其他异常情况。特殊巡检时,可以利用无人机巡检系统辅助完成鸟害巡检、树竹巡检、防火烧山巡检、外破巡检、灾后巡检等特殊巡检内容。 (二)无人机巡检作业方式
电力输电线路自动巡检系统及方法与制作流程
本申请实施例公开了一种电力输电线路自动巡检系统及方法,由微型无人机群、边缘控制台、巡检控制中心组成,其中,巡检控制中心向边缘控制台下达巡检计划,边缘控制台根据所述巡检计划制定微型无人机群巡检策略,微型无人机群按巡检策略分组执行检查,微型无人机群完成检查任务后,返回边缘控制平台并传输巡检数据,边缘控制平台读取巡检数据,并识别巡检目标的缺陷情况,同时将缺陷情况上报巡检控制中心,生成巡检报告。 权利要求书 1.一种电力输电线路自动巡检方法,其特征在于,包括以下步骤: 步骤一:巡检控制中心把年度/季度/月度巡检计划下发至区域内各条输电线路的所有边缘控制平台; 步骤二:各个边缘控制平台根据自己微型无人机群的状态按照巡检计划要求制定本地化的巡检策略,并向巡检控制中心上报备案; 步骤三:在所述巡检策略制定的巡检作业日,在微型无人机群起飞前的一定时间内,根据边缘控制平台采集到的气象数据对制定的巡检策略进行校验,确定当前的气象条件是否允许微型无人机群起飞作业;若不允许,则放弃本次作业计划,并由边缘控制平台重新制定巡检策略后再执行;若允许,则平台在计划时刻下达开始巡检作业的命令;
步骤四:微型无人机群按照巡检策略的分组起飞并执行巡检作业,按照各自分组预定的飞行路线自动巡航,对各自分组确定的巡检目标进行图像视频的采集,边缘控制平台在无人机作业的过程中对无人机的飞行轨迹和状态进行监控; 步骤五:在巡检过程中,若有无人机出现工作异常的情况,边缘控制平台需安排备用无人机前往作业现场接替异常无人机巡检,并要求异常无人机返航; 步骤六:微型无人机在完成各自的巡检作业后自动返回边缘控制平台,在固定机位降落后进行充电、飞控系统检查及维护,同时通过数据传输接口将采集的巡检图像视频传送给边缘控制平台; 步骤七:边缘控制平台读取巡检图像视频后,使用图像识别技术对巡检目标的缺陷情况进行分析; 步骤八:若发现缺陷,根据缺陷特征与缺陷特征数据库进行对比,确定缺陷等级;边缘控制平台及时上报缺陷情况至巡检控制中心; 步骤九:边缘控制平台汇总各组无人机巡检结果并生成巡检报告,按巡检计划要求定期上报至巡检控制中心。 2.根据权利要求1所述的一种电力输电线路自动巡检方法,其特征在于,所述制定本地化的巡检策略具体包括: 将所述巡检计划分解到日和小时的级别,确定不同时段内的巡检目标杆塔和线路;同时对微型无人机群进行分组,确定每组执行无人机的备用机;并确定各组无人机巡检时的飞行路线。 3.根据权利要求1所述的一种电力输电线路自动巡检方法,其特征在于,若所述使用图像识别技术后未发现缺陷,则边缘控制平台在汇总各组微型无人机巡检结果后,生成本期巡检报告,按要求定期上报巡检控制中心。
高压线巡检机器人的结构设计
1 绪论 1.1 课题的研究背景 高压输电线路担负着我国电力传输的重任,它的安全可靠运行直接关系到国家经济的稳定发展。目前,采用高压和超高压架空的电力线路是长距离输配电力的主要方式,电力线路作为电力系统的重要组成部分,长期暴露在自然环境中,不仅要受正常机械载荷和电力负荷的内部压力,还要经受污秽、雷击、强风、滑坡、沉陷等外界侵害,将会促使线路上各元件产生老化,如不及时发现和消除,就可发展成为各种故障,对电力系统的安全和稳定运行构成威胁。因此,线路巡检是有效保证输配电线路及其设备安全运行的一项基础工作。线路巡检工作就是通过对输配电线路的巡视检查来掌握线路运行状况及周围环境的变化,及时发现设备缺陷和危及线路安全的隐患,提出具体检修意见,以便及时消除缺陷、预防事故发生,或将故障限制在小范围,从而保证输配电线路安全和电力系统的稳定。 对高压输电线路传统的巡检方式有飞机巡检、车辆巡检和人工巡检。 飞机巡检是指检测人员在直升飞机上利用望远镜或其它检测工具对线路进行巡查,发现是否存在缺陷和故障,如图1-1所示。一般安排在晴朗、能见度较好的天气条件下进行,不过由于直升飞机飞行速度的影响,线路从巡检人员的视野中快速经过,且巡检时一般要求直升飞机靠近高压线路飞行,因此这种巡检方式对巡检人员和飞行员的技术要求都较高。此外,飞机巡检易受气候变化、航空管制等影响,运行成本高,危险性大[1],难以得到推广。
高压线巡检机器人的结构设计 图1-1 飞机巡检方式 Fig.1-1 Aircraft inspection methods 车辆巡检是指在车辆等地面交通工具的配合下,巡检人员携带各种检测设备对线路进行巡查,如图1-2所示。这种检测方法机动性较好,成本也较飞机巡检低,在条件允许下,还可利用车辆承载能力强的特点,额外携带检修工具,根据需要就地开展检修。这种巡检方法的缺点是需要地面道路的支持,受地形的限制,在高山、丛林或沼泽等地理条件复杂的区域,车辆无法到达,巡检工作无法顺利开展。 图1-2 车辆巡检方式 Fig.1-2 Vehicle inspection methods
电力行业标准《架空输电线路机器人巡检系统
电力行业标准《架空输电线路机器人巡检系统 通用技术条件》编制说明 1 任务来源及工作过程 本标准根据国家能源局达的2016 年能源领域行业标准制(修)订计划(国能科技【2016】238号文件)要求制定。 2016年11月,全国架空线路标准化技术委员会线路运行分技术委员会秘书处在广州组织召开了《架空输电线路机器人巡检系统通用技术条件》电力行业标准起草小组启动会议。广东电网有限责任公司电力科学研究院、中国电力科学研究院、武汉大学、国网湖北省电力公司、国网吉林省电力公司、山东鲁能智能技术有限公司、广东科凯达智能机器人有限公司和标委会秘书处有关人员参加了会议。广东电网有限责任公司电力科学研究院汇报了标准编制提纲及标准草稿,会议讨论了标准编制提纲及草稿,并对下阶段标准编写工作进行部署。 2017年1月,第五届全国架空线路标准化技术委员会成立大会暨2016年工作会议在北京召开,标准主要编写单位广东电网有限责任公司电力科学研究院、中国电力科学研究院、武汉大学参加了会议。会上对《架空输电线路机器人巡检系统通用技术条件》初稿进行了审查,提出了修改建议。 2017年4月,全国架空线路标准化技术委员会线路运行分技术委员会秘书处在广州组织召开了《架空输电线路机器人巡检系统通用技术条件》行业标准讨论稿研讨会议。会上对标准讨论稿进行了认真的讨论,提出了《架空输电线路机器人巡检系统通用技术条件》征求意见稿。 2编制原则和主要内容 2.1 编制原则 编写该标准遵循与相关标准协调一致的原则,与设计规范和运行规程方面的相关标准没有矛盾。本标准是在充分总结、吸取我国输电线路人工巡检和输电线路运行维护经验的基础上,并结合我国架空输电线路机器人巡检系统技术研发和实际应用经验而制定的。 编写组在收集整理了相关基层单位架空输电线路机器人巡检系统应用情况和生
输电线路多旋翼无人机巡检研究
输电线路多旋翼无人机巡检研究 发表时间:2016-12-02T14:29:14.170Z 来源:《电力设备》2016年第18期作者:孟令川[导读] 提高了对输电线路巡视的效率,是对高海拔地区输电线路自动化巡视的一次有益尝试。 (国网四川省电力公司凉山供电公司)摘要:由于高海拔地区输电线路所处地形复杂,环境恶劣,对输电线路运行状态的巡视和管理提出了较高的要求。本文针对传统人工巡检方式效率低下,自动化水平不高的缺点,提出了利用无人机技术对输电线路进行自动化巡视的方案。利用无人机平台搭载图像采集设备和图像传输设备将输电线路实时采集画面传回至地面工作站。经过系统测试和试运行,提高了对输电线路巡视的效率,是对高海拔地区输电线路自动化巡视的一次有益尝试。关键词:高海拔;输电线巡视;无人机Abstract:Due to high altitude transmission line in complex terrain,conditions,running state on transmission line patrol and management put forward higher requirements.This article in view of the traditional manual inspection methods,inefficient automation level is not high faults,and puts forward the use of unmanned aerial vehicle(uav)technology for automation of transmission line patrol https://www.360docs.net/doc/ed14137788.html,ing unmanned aerial vehicle(uav)platform with image acquisition and image transmission equipment transmission line real-time gathering pictures back to ground station.After the system test and commissioning,improves the efficiency of transmission line patrol,automatic transmission line is of high altitude area patrol a beneficial attempt. Key words:high altitude;Transmission line patrol;Unmanned aerial vehicle(uav) 1引言由于架空输电线路的覆盖区域广、穿越区域地形复杂并且自然环境恶劣,线路基础、杆塔、导地线、金具等受到外界侵害而出现缺陷和隐患,导致线路故障跳闸威胁电网的安全和稳定运行[1]。为了掌握线路的运行状况和及时排除缺陷和隐患,供电企业每年要花费巨大的人力和物力资源进行巡线工作。现阶段运用最广泛的巡线方法是人工周期巡线,这种方法劳动强度大,而且耗时多、效率低下,有些线路受制于地形因素造成线路巡视异常困难。而无人机技术的发展为架空输电线路的巡线提供了新的移动平台。与常规人工巡检方法相比较,此项技术更为先进有效,可以成为保障线路安全运行的一种新的经济可行的手段[2]。无人机巡线技术的研究主要集中在发达国家。这些国家依托自身先进的无人机技术,在无人机巡线领域处于领先地位[3][4][5]。在我国,大部分地区还是主要依靠人工巡检的方式进行[6],检修人员步行或者驱车对输电线路进行目测观察。这种人工巡检的方式效率低下,工作强度大,自动化水平不高。 本文提出的利用无人机技术进行自动化巡视的方案,利用了无人机机动性强,巡视范围广,易于维护的特点。不仅提高了巡检的效率,而且还能节约人力成本和时间成本。 2无人机巡检系统设计无人机巡检系统从整体架构上来说,分前端与后台两部分[7]。前端部分包括无人机及机载设备,如图像采集设备,图传设备等,主要负责对输电线路和铁塔进行巡视;后台部分主要包括地面工作站,主要任务是规划任务并将采集到的信息进行处理等。前后端功能如图1所示。
南方电网无人机技术规范架空输电线路多旋翼无人机巡检系统专用
南方电网设备标准技术标书 架空输电线路多旋翼无人机巡检系统 专用部分 技术标书编号:0602501052201509 中国南方电网有限责任公司 2015年9月
目录 1....标准技术参数. (1) 2 项目需求部分 (3) 2.1 供货需求及供货范围 (3) 2.2 必备的备品备件、专用工具和仪器仪表 (3) 2.3 图纸资料提交单位 (4) 2.4使用条件 (4) 2.5特殊情况下使用条件 (4) 2.6 项目单位技术差异表 (4) 3 投标人响应部分 (5) 3.1投标人技术偏差 (5) 3.2投标人资料提交时间要求 (5) 3.3 推荐的备品备件、专用工具和仪器仪表 (5) 3.4 主要元器件来源 (6) 3.5 投标方需说明的其他问题 (6)
1标准技术参数 投标方应认真逐项填写所供设备技术参数和性能要求响应表(见表1.1)中“投标方保证值”栏,不论“标准参数值”栏是否给出具体数值,都不能空格,也不能以“响应”两字代替,不允许改动本表内“投标方保证值”栏之外的数值。如有差异,请填写表 4.1:技术差异表。 表1.1 技术参数和性能要求响应表
供货方应对使用单位指定的机组人员进行培训,参加培训人数可由双方协定;如果多旋翼无人机空机重量大于7公斤,供货方提供的培训应取得行业协会签发的合格证。 2 项目需求部分 2.1 供货需求及供货范围 投标方提供的多旋翼无人机系统的具体规格见表2.1:供货范围及设备需求一览表。投标方应如实填写“投标方保证”栏。 表2.1供货范围及设备需求一览表 2.2 必备的备品备件、专用工具和仪器仪表 投标方应向招标方提供必备的备品备件、专用工具和仪器仪表清单见表 2.2,要求提供的备品备件、专用工具和仪器仪表应是新品,与设备同型号、同工艺。 表2.2 必备的备品备件、专用工具和仪器仪表清单(项目单位填写)
110kV架空输电线路巡检机器人视频图像传输
1引言 为了确保高压输电线路的安全运行并减小人工巡检的工 作量,在国家863计划项目的资助下,我们对110kV架空输电线路巡检机器人进行了研究。机器人要完成巡检任务,不仅要求它能在输电线上快速的行走,还必须能够跨越诸如防震锤、耐张线夹、悬垂线夹等各种障碍。而在实际线路中,障碍物的类型多,环境复杂,有时仅靠机器人自身的传感器和动作决策库无法实现自主越障。在这种情况下,需要操作人员对其进行远程控制,协助机器人越过障碍物,确保机器人能够继续对线路进行巡检。 要实现机器人的远程控制,就必须使地面基站操作人员能够实时地获得机器人所处的环境信息,因此需要机器人将采集到的图像信息实时地传输给地面监控计算机,操作人员根据图像信息向机器人发出控制指令。对于远程监控系统来讲,有效地利用有限带宽进行实时快速地传输是一个方面,这可以通过 采用高效的压缩算法得以实现[1,2] ;而图像变化的连贯性是有效 监控的另一个重要因素,在某些情况下,图像传输速度虽快,但在监控端的图像却是时快时慢不连贯,同样不利于有效监控。 本文首先对110kV架空输电线路巡检机器人系统的组成进行了简单介绍,然后从提高图像传输速度和品质出发,探讨了如何利用并行方式提高图像传输的速度;通过分析影响图像连贯性的因素提出了实现图像连贯的实现方法;重点介绍了如何根据传输来的图像对机器人进行远程控制,最后用VC++编程实现了巡检机器人图像的实时传输和远程控制,并进行了实验验证。 2巡检机器人系统组成 巡检机器人本体照片如图1所示。主要由五大部分组成: 110kV架空输电线路巡检机器人 视频图像传输 肖海荣1周风余2宋洪军2刘文江11(山东交通学院信息工程系,济南250023)2(山东大学控制学院,济南250061) E-mail:xiaohairong@163.com 摘要论文首先介绍了110kV架空输电线路巡检机器人系统的组成和采用基于图像传输的远程控制的必要性,然后 从提高图像传输速度和品质出发,探讨了如何利用并行方式提高图像传输的速度,提出了实现图像连贯性的方法;最后用VC++编程实现了巡检机器人图像的实时传输和远程控制。实验表明,图像传输及远程控制效果理想,达到了设计要求。关键词 视频图像传输 110kV输电线路 巡检机器人 远程控制 文章编号1002-8331-(2006)10-0184-04文献标识码A 中图分类号TP242.2 ResearchonVideoTransmissionofInspectionRobotfor 110kVOverheadPowerTransmissionLines XiaoHairong1ZhouFengyu2SongHongjun2LiuWenjiang1 1(InformationEngineeringDepartment,ShandongJiaotongUniversity,Ji'nan250023) 2(CollegeofCotrol,ShandongUniversity,Ji'nan250061) Abstract:Intheremotemonitoringandcontrolsystem,efficiencyandconsistencyofvideotransmissionisvite importantforefficientmonitoring.Inthispaper,aimmingathowtoenhancetheefficiencyandconsistency,wediscussthedesignprocessofremotevideotransmissionandtheremotecontrolschemeforinspectionrobot.Theefficiencyandconsistencyofthevideotransmissionandthefeasibilityoftheremotecontrolschemearesupportedbytheexperimentresults.Keywords:videotransmission,110kVPowerTransmissionLines,inspectionrobot,remotecontrol 基金项目:国家863高技术研究发展计划资助项目(编号:2002AA420110-4) 作者简介:肖海荣(1969-),女,硕士,副教授,主要研究方向为智能机器人的研究和开发,计算机监控系统。周风余(1969-),男,在读博士,副教授, 主要研究方向为特种机器人的研究、开发和利用。宋洪军(1975-),在读博士,研究方向为机器人视觉。刘文江(1971-), 研究方向为计算机控制。
输电线路图像在线监测系统
输电线路图像在线监测系统 一、概述 近几年,随着我国经济飞速发展,电力对人们日常生产生活影响越来越大,为了适应社会建设发展需要,我国不断加大对国家电网建设的扶持。然而,随着输电线路的不断增多,一些问题也开始逐渐显现出来,因为我国的特殊地理特征,导致我国的输电线路时刻饱受着自然界的摧残,给国家及企业都带来了巨大的损失。 这种情况持续一段时间后,随着输电线路图像在线监测系统的出现,对输电线路破坏起到了一个很好的遏制作用,从源头上减少了因有意或无意造成的输电线路损坏,同时亦为电力的抢修提供了必不可少的时间保障,减少了因长时间断电而造成的巨大经济损失。 它的出现,为我国输电线路的完整性提供了重要保障,是我国防止输电线路破坏、保障国家电力系统畅通的最强有力手段。 二、图像在线监测系统工作原理 图像在线监测系统是一套视频在线监测装置,将采集到的输电线路周围建筑施工(危险点)、外力破坏、塔材被盗、火灾、导线舞动、导线悬挂异物等异常情况,通过3G/GPRS/CDMA网络实时的传送到中心监控分析系统,并以多种方式发出预警信息,提示管理人员采取必要的预防措施。 三、图像在线监测系统技术参数
四、图像在线监测系统工程案例图 五、深圳特力康公司简介 深圳特力康科技有限公司主要生产和销售智能电网在线监测系统、电力铁塔
防盗报警器、基站新风节能设备、蓄电池GPS定位防盗追踪器、输电线路图像监视系统、架空线路冰冻灾害预警系统、输电线路微气象区远程监测系统、输电线路无线测温系统、通信铁塔倾斜监测预警系统、架空线路夜间指示器、电力线路防盗报警器、太阳能驱鸟器、便携式3G视频监控系统、远程防偷电报警系统移动机房远程监控系统、基站馈线防盗追踪器、井盖无线防盗报警系统等视频监控和防盗报警产品。 通信基站节能产品——基站智能新风系统已经通过中国移动和国家信息产业部的检测和测试,各项指标都满足并高于测试要求,并获得了多项专利和软件著作权,同时我司是中国电信集团集采的入围厂家,产品已经在全国20多个省份大批量使用,包括山东、河南、吉林、陕西、广西、江苏、安徽、贵州等。 另外我司自主研发的电力输电线路在线监测系统符合国网和南网的标准,并已经通过第三方检测和浙江电网电力研究院测试,自2010年以来配合合作伙伴支撑30余次国网、南网输电线路在线监测各子系统的招投标、项目合作,并且参与了一些大型保电项目的建设,包括世博会保电项目和深圳大运会保电项目。目前产品在吉林、山西、江苏、浙江、广东、重庆、广西、湖南、湖北、山东等省、市电力部门成功运用,效果得到一致好评。 公司自创立以来,一直坚持“以科技为第一生产力、专业品质、顾客至上”的经营理念,始终将产品质量视为企业生命,已率先通过了并切实贯彻ISO9001国际质量管理体系认证。 特力康随时愿与您一起携手共创你我美好未来!
电力智能巡检系统
1.概述 电力系统的稳定运行关系着人民生活和生产活动乃至国家和社会的稳定。电力系统的每一次故障都有可能给社会造成无法估量的损失。所以,保证电力系统安全运行是输变电部门等电力行业的首要任务。 电力设施巡检是有效保证电力系统安全的一项基础工作。巡检的目的是掌握线路运行状况及周围环境的变化,发现设施缺陷和危及线路安全的隐患,保证线路的安全和电力系统稳定。 华微电力智能巡检系统是华微软件在多年的移动技术开发经验的基础上,和广州供电局输电部、茂名供电局等单位联合研制成功的,它结合了Microsoft Windows Mobile、GPS、RFID、无线通信以及商业智能等先进技术。 华微电力智能巡检系统由巡线终端和后台管理系统组成。总体架构如下: 巡检终端是一个运行Microsoft Windows Mobile的Pocket PC,该Pocket PC装备有GPS/RFID和无线通讯设施(GPRS或者CDMA)。该终端可以通过无线通信和后台管理系统联系。后台管理系统提供任务管理、设施台帐管理和缺陷管理和分析等功能,并接受来自于巡检终端的巡检记录等资料。 华微输电线路智能巡检系统的设计目标是通过确保巡检工作的质量以及提高巡检工作的效率来提高设备维护的水平。具体地说,华微电力智能巡检系统主要解决了电力设施巡检工作中以下三个重要问题: 1. 巡检不到位、漏检、或者不准时; 2. 手工填报巡检结果效率低、容易漏项或出错; 3. 管理人员难以及时、准确、全面地了解线路状况,难以制定最佳的保养和维修方案。 2.功能与特性
2.1.巡检终端 在用户登录系统后,巡检终端能够通过有线或者无线的方式获取巡检任务。 巡检终端能够方便填写被巡检设施的运行情况。系统为用户提供标准、规范、高效的设施巡检报告录入方式。 巡检终端能通过有线/无线通信和后台系统同步资料。系统能够通过有线或无线的连接后台系统保持数据同步,系统能够智能地自适应有线或无线连接而无需用户干预。
无人机在电力行业的现状与未来
无人机在电力行业的现状与未来 北方天途航空 一、行业背景 “十二五”期间,我国电网建设经历了高速发展的阶段,规模已跃居世界首位。目前我国已经建成了六大跨省区的电网,分别是南方、西北、华东、华中、华北和东北这六大电网,输电线路总长度超过了115万千米,500kV及以上的输电线路已成为各区电网输电主力。我国的国土幅员辽阔,地形也相对复杂,丘陵较多、平原较少,加上气象条件的复杂多变,给跨区电网和超高压输电线路工程的建设带来一定难度,加上建成之后的维护与保养,仅仅依靠现有的检查手段和常规测试并不能满足高效快速的要求,也不能达到很好的效果。无人机技术的运用,能够很好的完成电力巡检和建设规划任务,自然就能得到了电力企业的认可及大规模应用。 天途无人机(线上机器人)在南方电网特高压线上进行带电清障作业
天途电力无人机在国网北京电力公司执行架线任务 二、行业标准 2013年,中国民用航空局(CAAC)下发《民用无人驾驶航空器系统驾驶员管理暂行规定》,业界普遍认为这代表着迈出了无人机规范管理迈出了第一步。
在电力行业,无人机主要被应用于架空输电线路巡检,为此国家电网发布了Q/GDW 11383-2015《架空输电线路无人机巡检系统配置导则》、南方电网发布了《架空输电线路机巡光电吊舱技术规范(试行)》、中电联发布了DL/T 1482-2015《架空输电线路无人机巡检作业技术导则》,对无人机巡检系统及光电吊舱进行规范。 三、无人机系统概述 无人机巡检系统指利用无人机搭载可见光、红外等检测设备,完成架空输电线路巡检任务的作业系统。 无人机巡检系统一般由无人机分系统、任务载荷分系统和综合保障分系统组成。无人机分系统指由无人驾驶航空器、地面站和通讯系统组成,通过遥控指令完成飞行任务的无人飞机系统。任务载荷分系统指为完成检测、采集和记录架空输电线路信息等特定任务功能的系统,一般包括光电吊舱、云台、相机、红外热像仪和地面显控单元等设备或装置。综合保障分系统指保障无人机巡检系统正常工作的设备及工具的集合,一般包括供电设备、动力供给(燃料或动力电池)、专用工具、备品备件和储运车辆等。 无人机巡检系统包括无人直升机(按结构形式,一般分为单旋翼带尾浆式和多旋翼式)巡检系统和固定翼无人机巡检系统。无人机按照空机质量分为中型无人机和小型无人机。中型无人机指空机质量大于7kg且小于等于116kg的无人机,适用于中等距离的多任务精细化巡检;小型无人机指空机质量小于等于7kg 的无人机,适用于短距离的多方位精细化巡检和故障巡检。
架空输电线路机器人全自主巡检系统及示范应用
架空输电线路机器人全自主巡检系统及示范应用 Full Automatic Inspection System and Its DemonstrationApplication Based on Robot for Overhead Transmission Lines 彭向阳1,钱金菊1,吴功平2,麦晓明1,魏莱3,饶章权1 1.广东电网有限责任公司电力科学研究院,广州510080 2.武汉大学动力与机械学院,武汉430072 3.广东电网有限责任公司惠州供电公司,惠州516001 基金项目:南方电网公司重点科技项目(K-GD2014-0621);国家高技术研究发展计划(863计划)(2006AA04Z202);Project supported by Key Science and Technology Project of China Southern Power Grid Co;,Ltd;(K-GD2014-0621),National High-tech Research and Development Program of China(863Program)(2006AA04Z202); 摘要 机巡作业是当前电力巡检的主要发展方向,但与直升机、无人机以及变电站机器人相比,我国输电线路机器人巡检尚未达到实用化水平。为此,对输电线路机器人实用化巡检关键技术开展了研究,建立了机器人典型作业模式,研发了穿越式、跨越式两类巡检机器人,提出了机器人行走路径改造方法,首次设计了机器人自动上下线装置,并完成了机器人全自主巡检系统的研制。机器人通过了多种复杂自然环境和电磁环境工况的试验考核,以及户外真型线路试验段的功能测试,在500kV带电运行线路开展示范应用,对线路设备同时进行可见光和红外检测。巡检中暴露了巡检系统存在的问题并进行分析解决,提出了机器人异常情况下的紧急救援措施并成功开展带电救援作业。机器人单次巡检里程达到10km以上,巡检应用取得良好效果,机器人巡检系统达到一定的实用化水平。