光纤陀螺随机误差建模与滤波方法研究
第34卷增刊2008年12月
光学技术
OPTICAL TECHN IQU E
Vol.34Suppl.
Dec. 2008
文章编号:100221582(2008)S2*******
光纤陀螺随机误差建模与滤波方法研究Ξ
李晓峰,徐军,张胜修
(第二炮兵工程学院,西安 710025)
摘 要:提出了一种适用于高精度光纤陀螺的静态输出信号建模的时间序列模型,建立了光纤陀螺随机误差的卡尔曼滤波器。结果表明,该建模和滤波方法有效地减小了FO G的误差,明显地降低了陀螺的随机漂移,提高了导航精度,具有较好的实用价值。
关键词:光纤陀螺;时间序列;随机漂移;卡尔曼滤波
中图分类号:U666.1 文献标识码:A
Study on the modeling and f ilter of the f iber2optical gyroscope random error
LI X iao2feng,X U J un,ZH ANG Sheng2xiu
(The Second Artillery Engineering College,Xi′an 710025,China)
Abstract:A time sequence model which can be applied in the modeling of high2precise FO G′s static output signal is pre2 sented,and the real time K alman filter of FO G random error is built.The result shows that this modeling and filtering method can reduce the error of high2precise FO G.The navigation errors are depressed,and the navigation precision is improved.
K ey w ords:FO G;time sequence;random drift;K alman filter
1 引 言
陀螺仪是用于自主测量载体相对于惯性空间旋转运动的元件,因此以陀螺仪为核心的惯性测量系统在飞行器控制与制导,空中、海上和陆上导航/定位中都起着至关重要的作用。光纤陀螺仪是利用Sagnac效应的角速度传感器。Sagnac效应是指当环形干涉仪旋转时,产生一个正比于旋转速率的相位差。光纤陀螺仪具有可靠性高、抗冲击、频带宽、成本低、平均无故障时间长等诸多优点,因此在惯性制导和导航的许多应用领域[1,2],已经将光纤陀螺仪作为一项关键技术进行研究。
在惯性技术中通常将惯性敏感元件的误差模型分为静态误差模型、动态误差模型和随机误差模型三类。静态误差模型和动态误差模型可以比较容易的用代数方程来表示,比较容易补偿。随机误差是指误差中随机变化的那部分,要用统计规律来描述,其误差需要通过建立误差模型并采用滤波的方法来减小。陀螺随机误差模型建立的准确与否对惯性测量单元的精度有着重要的影响[3,4]。本文研究了光纤陀螺随机误差时间序列建模预测方法[5],并在此基础上利用卡尔曼滤波来减小随机误差。实践证明,该方法具有高的建模预测精度,对于光纤陀螺性能的分析与预测也趋于实际情况。
2 时间序列建模
时间序列分析是一种系统辨识方法,即在系统的输人未知或不可测的情况下,假设系统的输人为白噪声,按时间顺序记录其输出量,然后根据这些输出量确定系统结构及特性的一种方法。时间序列建模内容包括数据采集、数据检验与预处理、模型形式选取、模型参数估计、模型适用性检验等问题。对于建模过程中的数据采集、检验与预处理的具体方法,本文不再详述,具体过程可见参考文献[6]。
随机误差模型都可以用时间序列的建模方法来获得,对于光纤陀螺的建模一般采用自回归模型(AR模型)、自回归2滑动平均混合模型(ARMA模型)。当输出序列是非平稳时间序列时,一般采用自回归差分滑动平均模型(ARIMA模型)。
具体的建模步骤为[7]:
(1)对陀螺测试所得到的随机误差样本数据序列进行统计检验。首先进行平稳性检验,如发现为非平稳的随机时间序列,应提取其中确定性的趋势项,其次进行周期性检验,如发现潜周期分量,应提取其中能量较大的潜周期分量,最后对去除了趋势项和潜周期分量的残差序列进行正态性检验。
(2)如果经过检验的陀螺随机误差数据的残差序列是平稳时间序列,则可利用平稳时间序列法建立其误差模型。首先确定所要拟和的线性模型的类别和阶数,其次估计模型参数并进行适用性检验,如发现潜周期分量,应提取其中较大的潜周期分量,最后对去除了趋势项和潜周期分量的残差序列进行正态性检验。
(3)当残差序列仍然是非平稳时间序列,则应进行差分处理,使之成为平稳时间序列,然后再利用平稳时间序列AR2 MA模型分析法建立光纤陀螺的误差模型。
(4)对所建立的数学模型进行变换,使之成为连续性微分方程。由此,便可得到应用卡尔曼滤波器处理的系统模型,然后进行参数的精估计。
针对本文所要建立的模型,下面简要介绍一下自回归滑动平均模型,简称为ARMA模型。
ARMA模型的一般形式为[8]
y(t)+a1y(t-1)+…+a m y(t-m)
=c0e(t)+c1e(t-1)+…+c n e(t-n)(1)
971
Ξ收稿日期:2008208226 E2m ail:xiaofeng-li2006@https://www.360docs.net/doc/5b6549378.html,
作者简介:李晓峰(19822),男,陕西省人,第二炮兵工程学院博士研究生,主要从事控制理论与工程研究。
式中y(t)为信号时间序列,m、n为模型阶次,a i、c i为模型系数,e(t)为白噪声序列。引入单位滞后算子q-1,即q-1y(t) =y(t-1),则(1)式用算子形式可写为
A(q-1)y(t)=C(q-1)e(t)(2)其中A(q-1)=1+a1q-1+…+a m q-m;C(q-1)=1+c1q-1 +…+c n q-n。
将模型式(1)和式(2)记为ARMA(m,n),则AR(m)模型和MA(n)模型可以分别表示为A(q-1)=e(t)和y(t)= C(q-1)e(t)。
实际问题中,时间序列{y(t)}并不是平稳的,不能用ARMA(m,n)模型来表示。但是,如果将{y(t)}进行有限次差分后,得到的时间序列{y′(t)}可以用ARMA(m,n)模型来表示。原时间序列{y(t)}可以用非平稳时间序列模型ARIMA(m,d,n)来表示。具体方法是:先对原非平稳随机数据序列进行d次差分,直到数据变为平稳;然后对新数据按ARMA建模方法建立模型;最后把原序列代入到模型中,即得到ARIMA模型。
模型参数的估计方法主要有矩估计,最小二乘估计(L S 估计),最小方差估计(LMS估计),最大似然估计(ML估计)和最大熵估计,其具体方法详见文献[9]。
本文采用残差平方和检验准则中的F2准则进行模型的适用性检验。残差平方和检验准则是采用不同的统计量来比较高阶模型的残差平方和是否比低阶模型的残差平方和有显著下降。但是在比较残差的下降情况时,这一准则没有明确的给出判断残差下降显著性的度量标准,于是,K.J.Astrom 提出将F2分布的假设检验用于检验残差平方和下降的显著性。其模型适用性检验方法详见参考文献[9]和[10]。
3 随机误差的卡尔曼滤波方法
为了验证本文中所提出的时间序列建模和卡尔曼滤波方法的有效性,进行了以下实验。根据光纤陀螺随机误差数据,建立随机误差AR(2)模型:
x k=-0.0501x k-1-0.0090x k-2+αk
输出方程:
y k=x k+ν
则卡尔曼滤波的状态矩阵方程和输出矩阵方程为:
X k=A X k-1+B W
Z
=HX k+V
其中:
A=-0.0501
-0.0090
10
, X k=
x k
x k-1
B=1,
V=v, H=(1,0), W=
a k
W(k)和V(k)的统计特性为:均值:E[W(k)]=0 E[V(k)]=0;自相关函数:r w w(k,j)=Qδkj,r vv(k,j)= Rδkj;互相关函数:r w v(k,j)=0。
上述系统的卡尔曼滤波基本方程[11]为:
最优预测估计滤波方差阵:
P(k|k-1)=A3P(k-1|k-1)3A T+B3Q(k-1)B T 最优滤波增益矩阵:
K(k)=P(k|k-1)3H T(k)3[H(k)P(k|k-1)3
H T(k)+R(k)]-1
最优预测估计方程:
X(k|k-1)=A3X(k-1|k-1)
最优滤波估计方程:
X(k|k)=X(k|k-1)+K(k)3[Z(k)-H(k)3
X(k|k-1)]
最优滤波估计误差方差阵:
P(k|k)=[I-K(k)3H(k)]3P(k|k-1)3
[I-K(k)3H(k)]T+K(k)3R3(k)3K T(k) X(0)的初始参数可以取为零阵,P阵取为单位阵,取:Q
=
σ2
a
0σ2a
],R=σ2a。
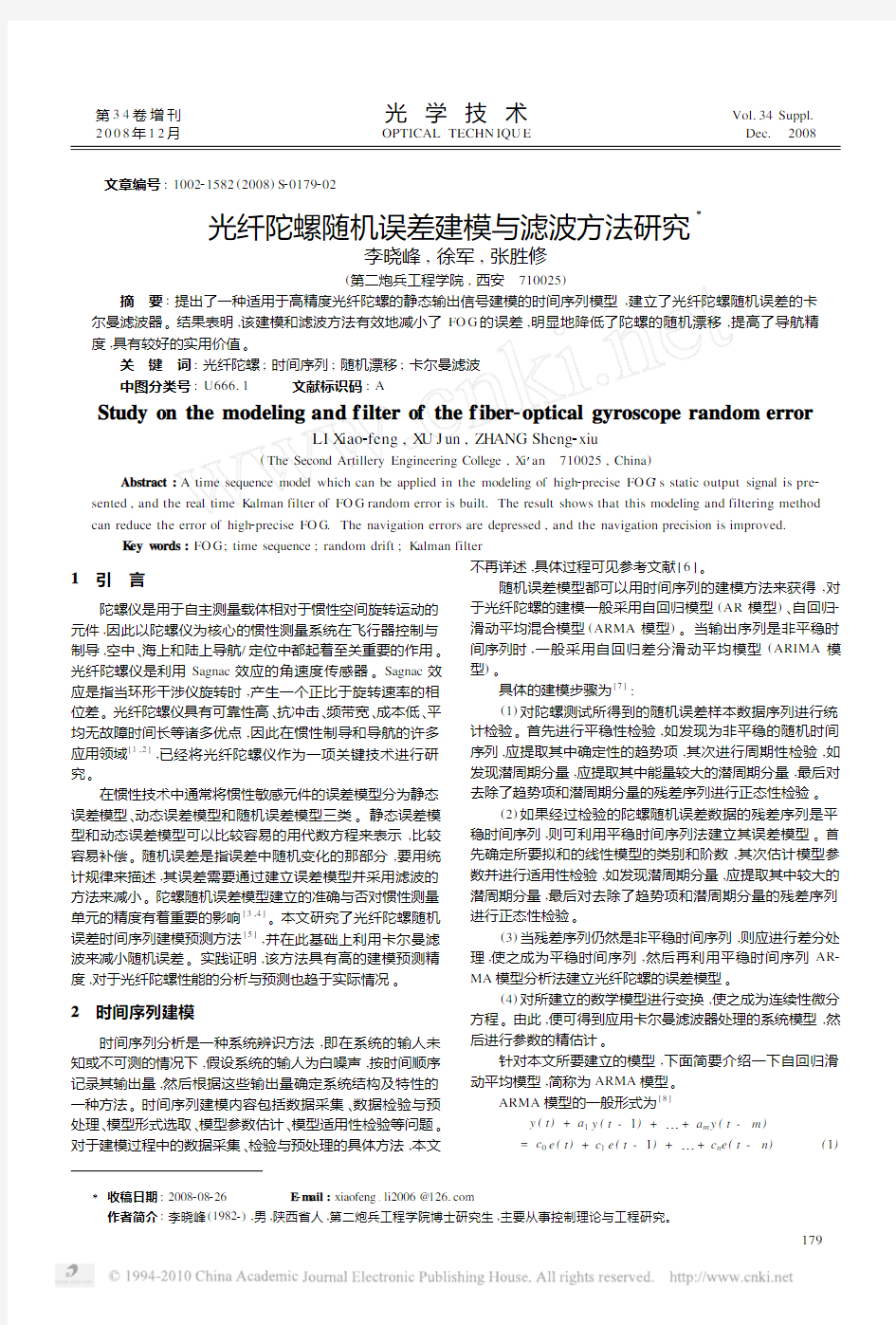
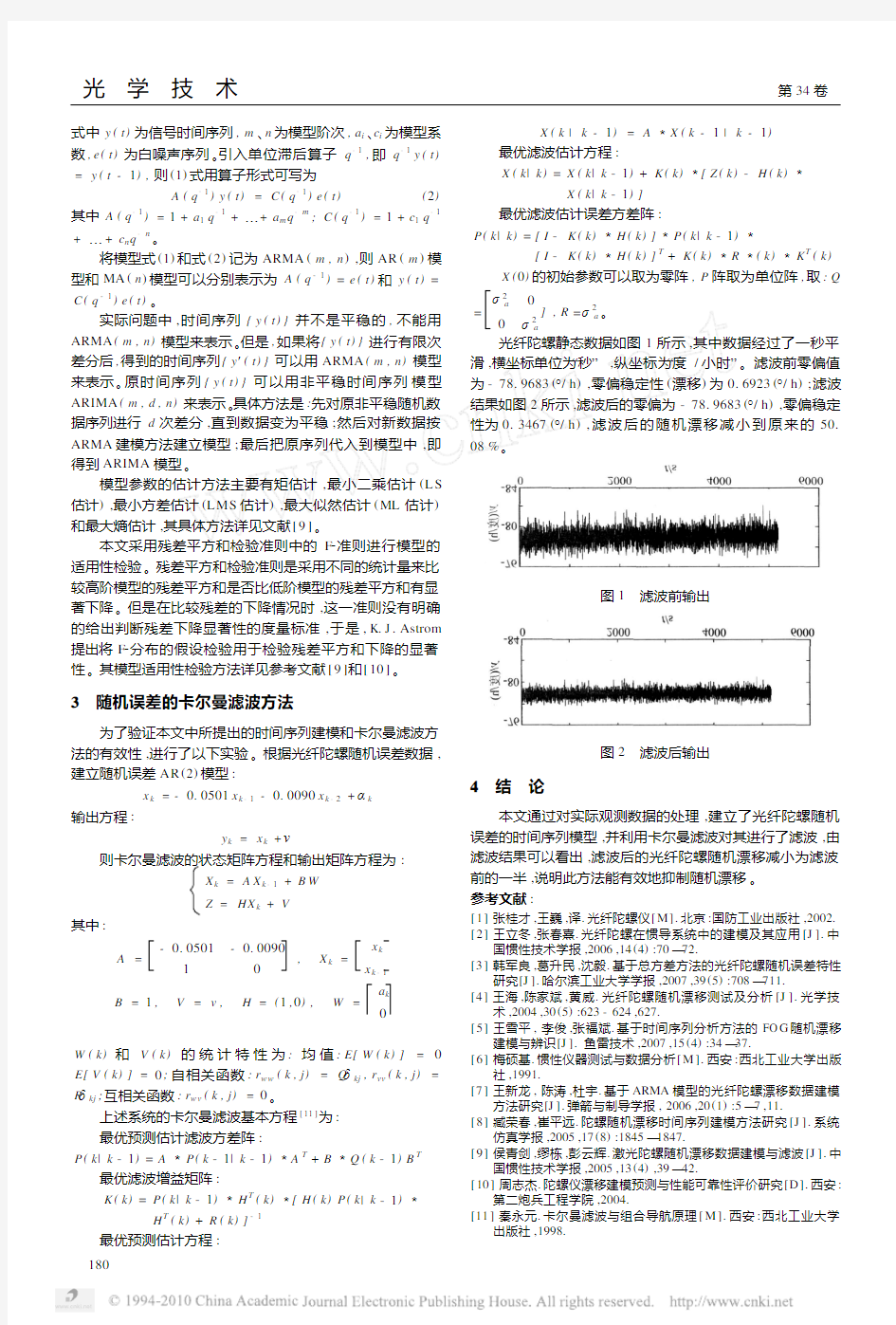
光纤陀螺静态数据如图1所示,其中数据经过了一秒平滑,横坐标单位为“秒”,纵坐标为“度/小时”。滤波前零偏值为-78.9683(°/h),零偏稳定性(漂移)为0.6923(°/h);滤波结果如图2所示,滤波后的零偏为-78.9683(°/h),零偏稳定性为0.3467(°/h
),滤波后
的随机漂移减小到原来的50. 08%。
图1 滤波前输出
图2 滤波后输出
4 结 论
本文通过对实际观测数据的处理,建立了光纤陀螺随机误差的时间序列模型,并利用卡尔曼滤波对其进行了滤波,由滤波结果可以看出,滤波后的光纤陀螺随机漂移减小为滤波前的一半,说明此方法能有效地抑制随机漂移。
参考文献:
[1]张桂才,王巍,译.光纤陀螺仪[M].北京:国防工业出版社,2002.
[2]王立冬,张春熹.光纤陀螺在惯导系统中的建模及其应用[J].中
国惯性技术学报,2006,14(4):70—72.
[3]韩军良,葛升民,沈毅.基于总方差方法的光纤陀螺随机误差特性
研究[J].哈尔滨工业大学学报,2007,39(5):708—711.
[4]王海,陈家斌,黄威.光纤陀螺随机漂移测试及分析[J].光学技
术,2004,30(5):623-624,627.
[5]王雪平,李俊,张福斌.基于时间序列分析方法的FO G随机漂移
建模与辨识[J].鱼雷技术,2007,15(4):34—37.
[6]梅硕基.惯性仪器测试与数据分析[M].西安:西北工业大学出版
社,1991.
[7]王新龙,陈涛,杜宇.基于ARMA模型的光纤陀螺漂移数据建模
方法研究[J].弹箭与制导学报,2006,20(1):5—7,11.
[8]臧荣春,崔平远.陀螺随机漂移时间序列建模方法研究[J].系统
仿真学报,2005,17(8):1845—1847.
[9]侯青剑,缪栋,彭云辉.激光陀螺随机漂移数据建模与滤波[J].中
国惯性技术学报,2005,13(4),39—42.
[10]周志杰.陀螺仪漂移建模预测与性能可靠性评价研究[D].西安:
第二炮兵工程学院,2004.
[11]秦永元.卡尔曼滤波与组合导航原理[M].西安:西北工业大学
出版社,1998.
081
光 学 技 术 第34卷
光纤陀螺仪的发展现状_周海波
2005年第24卷第6期 传感器技术(J o u r n a l o f T r a n s d u c e r T e c h n o l o g y) 综述与评论 光纤陀螺仪的发展现状 周海波,刘建业,赖际舟,李荣冰 (南京航空航天大学导航研究中心,江苏南京210016) 摘 要:根据光纤陀螺仪的工作原理和特点,光纤陀螺仪具有不同的分类。介绍了国外光纤陀螺仪的现状,预测了近期和长远的发展趋势,旨在对我国的光纤陀螺技术的发展能有所帮助。 关键词:光纤陀螺仪;萨格纳效应;干涉型;谐振式;布里渊式 中图分类号:T N2,T P2 文献标识码:A 文章编号:1000-9787(2005)06-0001-03 D e v e l o p m e n t s t a t u s o f f i b e r-o p t i c g y r o s c o p e s Z H O UH a i-b o,L I UJ i a n-y e,L A I J i-z h o u,L I R o n g-b i n g (N a v i g a t i o nR e s C e n t e r,N a n j i n gU n i v e r s i t yo f A e r o n a u t i c s a n dA s t r o n a u t i c s,N a n j i n g210016,C h i n a) A b s t r a c t:T h ef i b e r-o p t i cg y r o s c o p e(F O G)i sc l a s s i f i e d i n t od i f f e r e n tt y p e sa c c o r d i n gt oi t sp r i n c i p l ea n d c h a r a c t e r i s t i c.T h e i n t e r n a t i o n a l s t a t u so f F O G i si n t r o d u c e da n dt h es h o r t-t e r m a n dl o n g-t e r m t r e n do f F O G i s f o r e c a s t.I t w i l l b eb e n e f i t t o t h e c o u r s e o f o u r F O G. K e yw o r d s:F O G(f i b e r-o p t i c g y r o s c o p e);S a g n a c e f f e c t;i n t e r f e r o m e t r i c;r e s o n a n t;B r i l l o u i n 0 引 言 光纤陀螺仪属于第四代陀螺仪———光学陀螺仪的一种,其基本工作原理基于萨格纳效应,即在同一闭合光路中从同一光源发出两束特征相同的光,沿相反的方向进行传播,汇合到同一探测点,产生干涉。若存在绕垂直于闭合光路所在平面的轴线相对惯性空间转动的角速度,则沿正、反方向传播的光束产生光程差,该差值与角速度成正比。通过光程差与相应的相位差的关系,可通过检测相位差,计算角速度。它一般由光纤传感线圈、集成光学芯片、宽带光源和光电探测器组成。与传统的机械陀螺仪相比,具有无运动部件、耐冲击、结构简单、启动时间短、灵敏度高、动态范围宽、寿命长等优点。与另一种光学陀螺仪———环形激光陀螺仪相比,光纤陀螺仪不需要光学镜的高精度加工、光腔的严格密封和机械偏置技术,能够有效地克服了激光陀螺的闭锁现象,易于制造。 本文从光纤陀螺仪的原理和优点出发,着重对光纤陀螺仪的分类、国外研究现状及其发展趋势做了详细的介绍,希望对我国的光纤陀螺的研制和发展有所裨益。 1 光纤陀螺仪的分类 光纤陀螺仪按照不同的分类标准,有不同的分类结果。按结构可分为单轴和多轴光纤陀螺,光纤陀螺的多轴化正是其发展方向之一。按其回路类型可分为开环光纤陀螺和闭环光纤陀螺两类,开环光纤陀螺不带反馈,直接检测光输出,省去许多复杂的光学和电路结构,具有结构简单、价格 收稿日期:2004-11-20便宜、可靠性高、消耗功率低等优点,缺点是靠增加单模光纤的长度来提高陀螺的灵敏度,输入-输出线性度差、动态范围小,主要用作角度传感器[1]。闭环光纤陀螺包含闭环环节,大大降低光源漂移的影响,扩大了光纤陀螺的动态范围,对光源强度变化和元件增益变化不敏感,陀螺漂移非常小,输出线性度和稳定性只与相位变换器有关[2],主要应用于中等精度的惯导系统,对光纤陀螺的小型化和稳定性有重要作用,是高精度光纤陀螺研究的主要趋势。 按照光学系统的构成可分为全光纤型和集成光学器件型。全光纤陀螺成本较低,但实现高精度的技术难度较大,大多用于精度要求不高和低成本的场合。集成光学器件光纤陀螺在信号处理中可以采用数字闭环技术,易于实现高精度和高稳定性,是目前最常用的光纤陀螺构成模式。 按照性能和应用的角度可分为速率级、战术级和惯性级等3个级别[3]。速率级光纤陀螺已经产业化,主要应用于机器人、地下建造隧道、管道路径勘测装置和汽车导航等对精度要求不高的场合。日本、法国等国家研制、生产的这种精度的陀螺仪,已大批量应用到民用领域。战术级光纤陀螺具有寿命长、可靠性高和成本低等优点,主要用于战术导弹、近程/中程导弹和商用飞机的姿态对准参考系统中。惯性级光纤陀螺主要是用于空间定位和潜艇导航,其开发和研制正逐步走向成熟,美国有关公司和研究机构是研制、生产该级别光纤陀螺的佼佼者,如H o n e y w e l l,N o r t h r o p等公司。 1
MEMS陀螺误差辨识与补偿
2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s) M E M S陀螺误差辨识与补偿 谈振藩,张勤拓 (哈尔滨工程大学自动化学院,黑龙江哈尔滨150001) 摘 要:由于制造工艺等原因,M E M S陀螺的随机漂移非常大,严重影响了系统的性能。通过自制的基于 M E M S的捷联惯导系统的相关实验,对M E M S陀螺的确定性误差和随机误差分别进行了辨识和补偿。完 成确定性误差补偿,对M E M S陀螺随机误差进行了时间序列分析,并建立了A R模型,根据所选模型参数 建立了随机误差的系统方程,采用经典卡尔曼滤波进行随机误差补偿。实验结果说明:无论是静态下还是 动态下,补偿后信号的方差都大大下降,说明了滤波效果较为明显,具有一定的工程应用价值。 关键词:M E M S陀螺;时间序列分析;A R模型;卡尔曼滤波 中图分类号:T P212 文献标识码:A 文章编号:1000—9787(2010)03—0039—03 E r r o r i d e n t i f i c a t i o na n dc o m p e n s a t i o no f ME MSg y r o s c o p e T A NZ h e n-f a n,Z H A N GQ i n-t u o (C o l l e g e o f A u t o m a t i o n,H a r b i nE n g i n e e r i n g U n i v e r s i t y,H a r b i n150001,C h i n a) A b s t r a c t:M E M Sg y r o's r a n d o m d r i f t i s v e r yl a r g e,b e c a u s eo f t h em a n u f a c t u r i n gp r o c e s sa n do t h e r r e a s o n s, w h i c hs e r i o u s l y a f f e c t o n s y s t e mp e r f o r m a n c e.T h r o u g h e x p e r i m e n t s o f M E M S s t r a p d o w n i n e r t i a l n a v i g a t i o ns y s t e m, d e t e r m i n i s t i c a n ds t o c h a s t i c e r r o r w a s i d e n t i f i e da n dc o m p e n s a t e d.A f t e r d e t e r m i n i s t i ce r r o r w a s c o m p e n s a t e d,t h e s t o c h a s t i ce r r o r w a s a n a l y z e d b a s e d o nt i m e s e r i e s a n dA Rm o d e l w a s s e t u p.S y s t e m e q u a t i o no f s t o c h a s t i ce r r o r w a s e s t a b l i s h e d b a s e d o nt h e s e l e c t e dm o d e l a n dt h ee r r o r w a s c o m p e n s a t e db y K a l m a nF i l t e r.T e s t r e s u l t s s h o w t h a t v a r i a n c e o f M E M S g y r o s c o p e s t o c h a s t i c e r r o r r e d u c e d g r e a t l y a f t e r f i l t e r,w h i c h i l l u s t r a t e s t h e f i l t e r i n g e f f e c t i s o b v i o u s,a n d h a s a c e r t a i nv a l u e o f e n g i n e e r i n g a p p l i c a t i o n. K e yw o r d s:M E M S g y r o s c o p e;t i m e s e r i e s a n a l y s i s;A Rm o d e l;K a l m a nf i l t e r 0 引 言 微机电系统(m i c r o-e l e c t r o-m e c h a n i c a l-s y s t e m,M E M S)陀螺仪已经出现了近二十年[1],与其他陀螺相比,M E M S陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优势,但由于早期精度较低,并没有引起重视。近些年,随着微电子加工技术的发展,M E M S惯性传感器特别是陀螺仪的精度获得大幅度的提高。基于M E M S惯性传感器的惯性导航系统己成为当今惯性技术领域的一个重要的研究热点。西北工业大学的苑伟政教授提出了虚拟陀螺的概念,通过研究同类传感器的相关性来提高其测量精度;东南大学的吉训生博士,把形态学滤波的思想引入到M E M S陀螺降噪中,具有一定的理论研究意义[2]。另外,还有很多学者提出了新的思路和方法,并仿真取得了一定的效果。但目前的众多学者的研究多处于理论研究方面,大多集中在对漂移的离线降噪。 M E M S陀螺仪精度较低的主要原因是输出信号中随机噪声含量较大,因此,在使用前对陀螺随机误差进行辨识和 收稿日期:2010—01—04降噪处理是十分必要的[3]。目前常用的陀螺仪随机误差辨识方法有自回归滑动平均(A R M A)建模法、功率谱密度分析(P S D)法和A l l a n方差分析法[4]。哈尔滨工程大学的张树侠教授针对激光陀螺和光纤陀螺的特点,分别建立了A R M A模型[5,6];东南大学的吉训生在对M E M S陀螺随机漂移信号建立A R(2)模型后,采用鲁棒性很强的H ∞ 滤波 方法,证明了H ∞ 滤波效果和实时性比小波变换要好[7]。 本文针对实际系统,从陀螺测量模型出发,全面地辨识出陀螺各误差项,尤其对M E M S陀螺随机噪声进行了建模和补偿,具有一定的工程实用价值。 1 M E M S捷联惯导系统 M E M S捷联惯导系统由M E M SI M U,信号采集电路,导航计算机,显示器,数字式电子罗盘H M R3000,G P S,键盘和电源等组成。 M E M S惯性测量单元(M E M SI M U)由6只M E M S陀螺和6只M E M S加速度计组成。M E M S捷联惯导系统框图 39 DOI:10.13873/j.1000-97872010.03.003
国内外光纤传感器的发展现状
国内外光纤传感器的发展现状 2011-6-29 8:25:44 讯石光通讯咨询网作者:iccsz 摘要:本文将分析光纤传感器国内外发展的现状。主要介绍了两方面的情况:光纤传感器原理性研究的发展现状和光纤传感器产品的应用与开发的现状。 本文将分析光纤传感器国内外发展的现状。主要介绍了两方面的情况:光纤传感器原理性研究的发展现状和光纤传感器产品的应用与开发的现状。前者报道了光纤光栅、分布式光纤传感技术以及光纤传感网的发展,这些是目前的研究热点;后者介绍了光层析成像技术、智能材料、光纤陀螺及惯性导航系统、工业工程类传感器(其中包括电力工业用高电压、大电流传感器,利用光纤的弹光效应和FBG器件的应力传感器等)。最后介绍了新型光纤材料与器件、氟化物玻璃光纤,碳涂覆光纤、以及正在研究中的蜂窝型波导光纤、液晶光纤等。 一、引言 随着密集波分复用DWDM技术、掺铒光纤放大器EDFA技术和光时分复用OTDR技术的发展和成熟,光纤通信技术正向着超高速、大容量通信系统的方向发展,并且逐步向全光网络演进。在光通信迅猛发展的带动下,光纤传感器作为传感器家族中年轻的一员,以其在抗电磁干扰、轻巧、灵敏度等方面独一无二的优势,已迅速成长为年成交额超过10亿美金,并预计将于2010年拥有超过50亿美金市场的产业。每年由美国光学工程师学会(OSA)主办的光纤传感国际会议(OFS)及时报道着光纤传感领域的最新进展,并对光纤传感及其相应技术进行有益的研讨。 当前,世界上光纤传感领域的发展可分为两大方向:原理性研究与应用开发。随着光纤技术的日趋成熟,对光纤传感器实用化的开发成为整个领域发展的热点和关键。由于光纤传感技术并未如光纤通信技术那样迅速地获得产业化,许多关键技术仍然停留在实验室样机阶段,距商业化有一定的距离,因此光纤传感技术的原理性研究仍处于相当重要的位置。由于很多光纤传感器的开发是以取代当前已相当成熟,可靠性和成本已得到公认,并已经被广泛采用的传统机电传感系统为目的,所以尽管这些光纤传感器具有如电磁绝缘、高灵敏度、易复用等诸多优势,其市场渗透所面临的困难和挑战是可想而知的。而那些具有前所未有全新功能的光纤传感器则在竞争中占有明显优势,FBG和其它的光栅类传感器就是一个最好的例证。当前的原理性研究热点集中于光纤光栅(FBG和LPG)型传感器和分布式光纤传感系统两大板块。 FBG型光纤传感器自发明之日起,已走过了原理性研究和实验论证的百家争鸣阶段。目前成熟的FBG制作工艺已可形成小批量生产能力,而研究的焦点也转向解决高精度应用,完善解调和复用技术,以及降低成本等几个方向上。另一方面,由于光纤传感器具有将传输与传感媒质合而为一的特性,使得沿布设路径上的光纤可全部成为敏感元件,因此,分布式传感成为光纤传感器与生俱来的优点。 对于光纤传感技术的应用研究主要有以下四大类:光(纤)层析成像技术(OCT,OPT)、智能材料(SMART MATERIALS)、光纤陀螺与惯导系统(IFOG,IMIU )和常规工业工程传感器。另外,由于光纤通信市场需求的带动以及传感技术的特殊要求,新型器件和特种光纤的研究成果也层出不穷。 目前,我国的光纤传感器研究大多数集中于大专院校和科研单位,仍然未完成由实验室向产品化的过渡。其中,比较成熟的技术包括:清华大学光纤传感中心与总后合作研制开发的光纤油罐液位与温度测量系统,已经安装运行数年;北京航空航天大学与总装合作研制的光纤陀螺系统,目前指标为0.2°/hr ;中国计量学院研制的分布式光纤传感系统,已有产品报道;华中理工大学与广东某公司联合研制的强电压、大电流传感系统。此外,在广东、深圳等地,还建立了许多光纤无源器件生产厂
总方差方法在光纤陀螺随机误差分析中的应用
电V ol.39, No.1 第39卷第1期 光工程 2012年1月Opto-Electronic Engineering Jan, 2012 文章编号:1003-501X(2012)01-0062-06 总方差方法在光纤陀螺随机误差分析中的应用 石祥 国1,陈坚1,叶军1,王林2 ( 1. 第二炮兵工程学院,西安 710025; 2. 第二炮兵驻孝感地区军事代表室,湖北孝感 432100 ) 摘要:总方差方法被引入到光纤陀螺随机误差特性分析当中,有效克服了传统Allan方差法在长相关时间上计算易出现“崩溃”的问题。但用它直接分析光纤陀螺随机噪声存在算法偏差,不能真实反映角度随机游走噪声、量化噪声和指数相关噪声方差值,因此在算法上对总方差提出改进,使其适用于光纤陀螺噪声分析。对模拟的各项随机噪声进行仿真计算,验证改进后总方差方法可有效辨识噪声类型和水平。对光纤陀螺实测数据方差分析表明改进的总方差方法在平均因子较大的情况下可提高估计置信度,方差值稳定性好,比Allan方差法能更精确地分析出噪声项系数。 关键词:光纤陀螺;Allan方差;总方差;功率谱密度 中图分类号:TN253 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.01.011 Applications of Total Variance Method in Random Error Analysis of the Fiber Optic Gyro Signal SHI Guo-xiang1,CHEN Jian1,YE Jun1,WANG Lin2 ( 1. The Second Artillery Engineering College, Xi’an 710025, China; 2. The Second Artillery Representative Room of Xiaogan District, Xiaogan 432100, Hubei Province, China ) Abstract: Total variance is used to analyze the random noise of Fiber Optic Gyroscope (FOG), which efficiently solves the problem that the Allan variance calculation is easy to be unstable at long-term τ values. But there is algorithm error with total variance when analyzing the random noise of FOG directly, which cannot really reflect the variances of rate random walk noise, quantization noise and exponentially correlated noise. So an improved method based on total variance is presented to suit random noise analysis of FOG. The estimation performance with the simulated random noise shows that the improved total variance can efficiently identify the noise types and levels. According to the analysis of measured FOG signal, it can improve the confidence in the case of great mean index, the values of variance have a good stability, and it is better and more exact than Allan Variance in identifying noise coefficient. Key words: fiber optic gyroscope; Allan variance; total variance; power spectrum density 0 引 言 光纤陀螺(FOG)作为新一代的全固态惯性器件,已被广泛地应用于捷联式惯性导航系统。但由于其自身的结构特点和易受环境影响,输出信号中含有大量随机噪声,这些噪声往往呈现非平稳性和非正态分布特性,它们是影响光纤陀螺精度的一个关键因素。对光纤陀螺输出信号中的噪声进行有效地估计和辨识有助于进一步分析随机误差产生的原因,采取相应的补偿方法提高光纤陀螺性能。 Allan方差分析法作为IEEE认可的光纤陀螺误差项分析标准方法,能非常容易地对各种误差源及整个噪声统计特性进行细致的表征和辨识。“差分”是Allan方差分析的核心思想,即信号时域数据的二次差分收稿日期:2011-07-17; 收到修改稿日期:2011-10-19 作者简介:石国祥(1984-),男(汉族),陕西西安人。硕士研究生,研究方向:导航、制导与控制。E-mail:stone.712@https://www.360docs.net/doc/5b6549378.html,。
光纤陀螺随机误差的测定方法研究(精)
第33卷第2期应用科技V01.33.No.22006年2月AppliedScienceandTechnologyFeb.2006文章编号:1009—671X(2006)02—0040—03 光纤陀螺随机误差的测定方法研究 罗超1,贺林2,孙蓉1 (1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001) 摘要:针对光纤陀螺的随机噪声,分析了其产生的来源;对于5种主要的噪声源,运用IEEE公认的在时域上 对频域稳定性进行分析的方法——Allan方差法,进行了特性分析,并给出了误差系数的计算公式.同时介绍了 只测定角度随机游走系数时的2种简单测定方法:模型拟合法、归一化计算法;对于一组实际的陀螺零偏数据 进行了测定. 关键词:光纤陀螺;随机误差;Allan方差 中图分类号:TH824.3文献标识码:A Researchonthemeasurementofrandomerroroffiberopticgyro LUOCha01,HELin2,SUNRon91 (1.SchoolofAutomation,HarbinEngineeringUniversity,Harbin150001,China;2.SchoolofPowerandEnergyEngineering,HarbinEngineeringUniversity,Harbin150001,China) Abstract:Thesourceofrandomerrorsoffiberopticgyro(FOG)isanalysed.For5mainnoises,theAllanvariancemethod,whichisthemethodtoanalysethefrequencydomainstabilityontimedomainacknowledgedbyIEEE,isusedtomakeacharacteristicanalysis,andtheformulastocalculateerrorcoefficientsaregiven.Again,twosimplemeasuringmethods,modelfittingmethodandnormalizedcalculationalmethodaregiventomeasureonlytheangular
光纤陀螺仪的应用及发展
光纤陀螺仪的应用及发展 谷军,蔺晓利,何南,姜凤娇,邓长辉 (大连海洋大学信息工程学院) 摘要:本文介绍了光纤陀螺的工作原理,并根据光纤陀螺的特点介绍了在各个领域的应用,阐述了光纤陀螺在国内外的发展现状,并指出了光纤陀螺的发展趋势。从发展角度看,光纤陀螺仪将成为21世纪前期的发展重点。 关键词:光纤陀螺;现状;应用; 0 引言 萨格纳克(Sagnac)在1913年首先论证了运用无运动部件的光学系统能够检测出相对惯性空间的旋转的奇特现象,现在统称为萨格纳克效应。1976年Vali和Shorthill首次提出了光纤陀螺(Fiber optic gyro)的概念,它标志着第二代光学陀螺的诞生。光纤陀螺一问世就以其明显的优点、结构的灵活性以及诱人的前景引起了世界上许多科学家和工程师的普遍关注。国内对光纤陀螺的研究也有20多年的历史,经历开环到闭环的研究历程。在20多年的研究过程中,光纤陀螺的广泛应用前景已经得到了专家的认可,光纤陀螺作为惯性技术的核心器件,已经逐渐成为陀螺市场的主流产品。人类对光纤陀螺的需求也变得十分迫切。 光纤陀螺的应用非常广泛,是基于Sagnac效应的原理工作的。作为继激光陀螺仪之后出现的新一代陀螺,各国的研制工作已经取得了重大的进展。光纤陀螺仪的研制对惯性导航和控制领域十分重要,随着计算机、微电子和光纤技术的发展和应用,它将取代传统的机械陀螺和平台惯导系统。与机械陀螺相比,光纤陀螺无运动部件、使用寿命长;全固化结构、抗冲击能力强;测量动态范围大、无预热时问、启动时问短;不受地球吸引力影响;工艺相对简单,价格便宜;对捷联应用有先天优势。与激光陀螺相比,光纤陀螺的成本低、性价比高;体积小、功耗低、应用灵活;克服了激光陀螺闭锁带来的负效应;随着工艺和信号处理方案的发展,精度也可以和激光陀螺相当。 1 光纤陀螺仪 光纤陀螺仪是光学陀螺仪的一种。所谓光学陀螺仪就是利用萨格纳克Sagnac)效应构成的陀螺仪。利用光纤线圈构成的干涉仪效应来敏感角运动的装置称为干涉型光纤陀螺仪(IFOG);采用光纤作为谐振器来敏感角运动的装置称为谐振型光纤陀螺仪(RFOG);利用布里渊光纤环形激光器的频率变化原理构成的测角装置称为布里渊光纤陀螺仪(BFOG)。由于光学陀螺仪不象传统陀螺那样,依靠自转子的动量矩来敏感角运动。所以国外学术界也把这类陀螺定义为非陀螺仪角运动敏感器。 1.1光纤陀螺仪的特点 光纤陀螺仪作为一种新兴传感器件,具有许多深受欢迎的特点:(1)无运动部件,仪器牢固稳定,耐冲击和抗加速度运动;(2)结构简单,零部件少,价格低廉;(3)启动时间短(原理上可瞬间启动);(4)检测灵敏度和分辨率高(可达10 -7rad/s);(5)可直接用数字输出并与计算机接口联网;(6)动态范围极宽;(7)寿命长,信号稳定可靠;(8)易于采用集成光路技术;(9)克服了激光陀螺因闭锁现象带来的负效应。 光纤陀螺最大的特点是可根据不同的用途,选择不同的光纤长度和线圈直径及不同的信息处理方法,可覆盖陆地、航空、航天、航海等所有陀螺仪应用范围。与传统陀螺仪(液浮
中国光纤陀螺仪市场调研报告
中国光纤陀螺仪行业 市场调研投资分析预测报告
正文目录 第一章光纤陀螺仪行业概述 (19) 第一节光纤陀螺仪简述 (19) 一、定义及分类 (19) 二、产品特性 (20) 三、主要应用领域 (21) 第二节光纤陀螺仪的型号及用途 (21) 第三节光纤陀螺仪行业发展现状 (22) 第四节产业链结构分析 (25) 第五节光纤陀螺仪生产技术和工艺分析 (28) 第六节光纤陀螺仪在生产中遇到的问题及其解决方法 (31) 第七节光纤陀螺仪行业的地位分析 (31) 一、行业在第二产业中的地位 (31) 二、行业在GDP中的作用 (31) 第八节2015-2020年光纤陀螺仪行业相关政策发展的影响展望 (32) 一、国家“十三五”产业政策发展的影响展望 (32) 二、相关行业政策的影响展望 (32) 第二章中国光纤陀螺仪行业政策技术环境分析 (34) 第一节光纤陀螺仪行业政策法规环境分析 (34) 一、国家“十三五”规划解读 (34)
二、行业“十三五”规划解读 (34) 三、行业税收政策分析 (35) 四、行业标准概述 (36) 五、行业环保政策分析 (36) 六、行业政策走势及其影响 (36) 第二节政策法规对光纤陀螺仪产品的影响 (37) 一、2014-2015年中国光纤陀螺仪环保政策执行影响分析 (37) 二、节能环保新政策对光纤陀螺仪市场的影响 (37) 三、新政策对光纤陀螺仪市场的影响 (37) 第三节光纤陀螺仪行业技术环境分析 (38) 一、国内技术水平现状 (38) 二、国际技术发展趋势 (38) 三、科技创新主攻方向 (39) 第三章光纤陀螺仪生产技术分析 (41) 第一节光纤陀螺仪主要生产工艺技术 (41) 一、光纤陀螺仪生产工艺原理 (41) 二、光纤陀螺仪生产工艺流程 (42) 第二节光纤陀螺仪其他生产方法 (43) 第三节光纤陀螺仪生产工艺优劣势比较 (46) 第四节光纤陀螺仪工艺技术的改进与发展趋势 (46) 第五节光纤陀螺仪工艺技术路线的选择 (46) 第六节光纤陀螺仪质量指标 (47)
光纤陀螺
光纤陀螺及军事应用 摘要:本文主要介绍了光纤陀螺,光纤陀螺的发展历史及其现状;在光纤陀螺分类的基础上分析其原理;光纤陀螺的特点;分别于陆海空三个不同的方面讲述光纤陀螺的军事应用以及光纤陀螺未来发展趋势。 关键词:光纤陀螺;发展历史;原理;分类;特点;军事应用;发展趋势 Fiber Gyroscope and Military Application Xu Rui (School of Economy and Administration, Shanghai University, Shanghai 200444, China) Abstract: This paper mainly introduces the development history and present situation of fiber optic gyroscope, optical fiber gyroscope; analyze its principle based on the classification of the characteristics of fog; fog; military application and development trends in the future about the fiber optic gyroscope fog on three different aspects of armed respectively Keywords: Fiber gyroscope;History;principle;Classification;Characteristic;Military application;Development trend. 1 前言 现代陀螺仪是现代航空、航海、航天和国防工业中 广泛使用的一种惯性制导仪器,它的发展对一个国家的 工业、国防和其它高科技的发展具有十分重要的战略意 义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械 式的陀螺仪对工艺结构的要求很高,结构复杂,它的精 度受到了很多方面的制约[1]。光纤陀螺仪作为新一代的 陀螺仪,是一种利用Sagnac效应测量旋转角速度的新型 全固态惯性仪表[2],较为常见的外形如图(1)所示。光 纤陀螺因其零部件少、体积小、抗电磁辐射和冲击能力图1 光纤陀螺 强、寿命长、易于集成、成本低等优点而飞速发展, 广泛用于兵工、航海、航空、航天等军事领域。 2 光纤陀螺仪的发展历史及现状 自从美国犹他大学的VAL I和 SHORTHI LL等人成功研制第1个光纤陀螺以来,光纤陀螺已经发展了将近30年。以下是光纤陀螺的主要发展历程[3~7]。 1970 年,新一代低损耗光纤推动光纤陀螺的研制; 1976年, VAL I和SHORTHI LL 等人成功研制了干涉式光纤陀螺(I-FOG);1977 年~1982年,对光纤陀螺的基本结构进行研究,提出了光纤陀螺最小结构,开环结构和闭环结构,并提出了谐振式光纤陀螺(R-FOG)和布里渊光纤陀螺(B-FOG)的思想;1980年~1990年,对光纤陀螺的误差因素和光学元件进行研究,引入了超辐射发光二极管、保偏光纤、光学铌酸锂集成芯片、绕纤技术等,对光纤陀螺提出“all digital”的概念,首次实现商业化(实用于波音777);1990 年至今,光纤陀螺的实际应用研究(特别是航天航空,工业领域),运用光电集成芯片(LiNbO 质子交换光波导)、微光电机械、 3 信号处理技术等技术致力于降低光纤陀螺成本、小型化、高性能的研究,对I-FOG
光纤陀螺的误差分析及建模(精)
光纤陀螺的误差分析及建模 光纤陀螺具有许多独特的优点,由此引起了世界上众多研究机构的重视。目前光纤陀螺已经广泛的应用于民用和军用战术武器的惯性系统中。各国 的研究机构也在大力研制应用于航海、航天等领域中的高精度惯导级光纤陀 螺。光纤陀螺是基于萨格奈克(Sagnac)效应的广义相对论性效应而制成的角速 率传感器,它代表了惯性仪表与元件发展的一个新方向,与传统的机械陀螺相比,光纤陀螺采用全固态设计,结构简单,反映速度快,抗冲击能力强,动态范围宽。 对它的随机误差进行数理统计分析,找出其统计特性规律,并用一定的方法对其 进行补偿,对提高光纤陀螺的导航精度将产生重要意义。本文对于量化噪声、角度随机游走、零偏稳定性、速率随机游走、速率斜坡等5种主要的噪声源,通过运用Allan方差法便可很容易地辨识出影响光纤陀螺性能的各种因素,为有针对性的采取抑制噪声措施和采用各种滤波算法提供一定的参考依据;在仿真分析中,通过对比不同小波基、不同消失矩、不同分解层数、不同阈值处理方法等情况 下陀螺信号的小波去噪效果,设计了合适的滤波方案,从抑制光纤陀螺随机噪声 的角度出发,利用小波分析法对光纤陀螺的输出进行滤波处理,验证了滤波效果;用数学建模的理论对光纤陀螺的输出进行ARMA数学建模,对建模以后的输出进 行卡尔曼滤波,实现对随机误差的补偿,并且取得比较好的补偿效果。 同主题文章 [1]. 王海,陈家斌,黄威,张延顺,汤继强. 光纤陀螺随机漂移测试及分析' [J]. 光学技术. 2004.(05) [2]. 李战,冀邦杰,国琳娜,王海陆,严由嵘. 光纤陀螺零漂信号的Allan方 差分析' [J]. 鱼雷技术. 2007.(02) [3]. 缪玲娟. 小波分析在光纤陀螺信号滤波中的应用研究' [J]. 宇航学报. 2000.(01) [4]. 缪玲娟,张方生,沈军,刘伟. 光纤陀螺漂移的数据分析及建模(英文)' [J]. Journal of Beijing Institute of Technology. 2002.(01) [5]. 罗超,贺林,孙蓉. 光纤陀螺随机误差的测定方法研究' [J]. 应用科技. 2006.(02) [6]. 李凤海,郝炜亮,许化龙. 基于小波理论抑制光纤陀螺零漂的研究' [J]. 光电子技术. 2005.(01) [7].
光纤陀螺随机误差建模与滤波方法研究(精)
第34卷增刊光学技术Vol.34Suppl. 2008年12月OPTICALTECHNIQUEDec.2008 文章编号:100221582(2008)S2******* 光纤陀螺随机误差建模与滤波方法研究 李晓峰,徐军,张胜修 (第二炮兵工程学院,西安710025) Ξ 摘要:提出了一种适用于高精度光纤陀螺的静态输出信号建模的时间序列模型,尔曼滤波器。结果表明,该建模和滤波方法有效地减小了FOG的误差,,提高了导航精度,具有较好的实用价值。 关键词:光纤陀螺;时间序列;随机漂移;卡尔曼滤波中图分类号:U666.1文献标识码:A Studyonthemodelinggyroscoperandomerror ,J,ZHANGSheng2xiu EngineeringCollege,Xi′an710025,China) Abstract:whichcanbeappliedinthemodelingofhigh2preciseFOG′sstaticoutputsignalispre2 sented,andtheKalmanfilterofFOGrandomerrorisbuilt.Theresultshowsthatthismodelingan dfilteringmethodcanreducetheerrorofhigh2preciseFOG.Thenavigationerrorsaredepresse d,andthenavigationprecisionisimproved. Keywords:FOG;timesequence;randomdrift;Kalmanfilter 1引言 陀螺仪是用于自主测量载体相对于惯性空间旋转运动的 元件,因此以陀螺仪为核心的惯性测量系统在飞行器控制与制导,空中、海上和陆上导航/定位中都起着至关重要的作用。光纤陀螺仪是利用Sagnac效应的角速度传感器。Sagnac效应是指当环形干涉仪旋转时,产生一个正比于旋转速率的相位差。光纤陀螺仪具有可靠性高、抗冲击、频带宽、成本低、平均无故障时间长等诸多优点,因此在惯性制导和导航的许多应用领域[1,2],已经将光纤陀螺仪作为一项关键技术进行研究。
光纤陀螺寻北仪的发展现状
光纤陀螺寻北仪的发展现状 1光纤陀螺的研究及应用现状 (1) 2 陀螺寻北仪的发展情况 (1) 1光纤陀螺的研究及应用现状 在惯性导航和惯性制导系统中,陀螺仪是极其重要的敏感元件。所谓惯性导航,就是通过测量运载体的加速度,经过计算机运算,从而确定出运载体的瞬时速度和瞬时位置。所谓惯性制导,则是在得到这些参数的基础上,控制运载体的位置以及速度的大小和方向,从而引导运载体飞向预定的目标。 以陀螺仪和加速度计为敏感元件的惯性导航和惯性制导系统,是一种完全自主式的系统。它不依赖外部任何信息,也不向外发射任何能量,具有隐蔽性、全天候和全球导航能力。因此,惯性导航成为现代飞机、大型舰只和核潜艇的一种重要导航手段,而惯性制导则成为地地战术导弹、战略导弹、巡航导弹和运载火箭的一种重要制导方法。此外,惯性导航还可陆军炮兵测位、地面战车导航以及大地测绘等领域。由此可见,陀螺仪在航空、航天、航海、兵器以致国民经济的某些部门中都有着广泛的应用。 2 陀螺寻北仪的发展情况 第一阶段,20世纪50年代在船舶陀螺罗经的基础上,研制出矿用液浮式陀螺罗盘,这是陀螺寻北仪发展的初级阶段。在这个阶段,德国的克劳斯塔尔矿业学院于1949年研制出液浮式单转子陀螺球,电磁定中心,陀螺电源频率333HZ,电压为100伏三相交流电,陀螺转速19000转/分。一次观测中误差06'' ±,定向时间4小时,仪器重量640千克。其型号为MWI,1955年和1959年相继研制出MW3和MW4a型。精度进一步提高,定向时间进一步缩短,仪器重量进一步减轻。 第二阶段,从20世纪60年代开始,利用金属悬挂带将陀螺灵敏部陀螺马达转子和陀螺房在空气中通过悬挂柱悬挂起来,悬挂带的另一端与支承外壳相固定并采用三根导流管直接向马达供电。这样构成了摆式陀螺罗盘。与第一阶段相比,仪器结构大大简化,全套仪器进一步小型化,重量大大减轻,由于电源频率稳定性大大提高,使陀螺转速稳定,减小了角动量脉动,提高了仪器观测精度。1963
光纤陀螺仪的发展现状
2005年第24卷第6期 传感器技术(Journa l o f T ransducer T echno logy) 综述与评论 光纤陀螺仪的发展现状 周海波,刘建业,赖际舟,李荣冰 (南京航空航天大学导航研究中心,江苏南京210016) 摘 要:根据光纤陀螺仪的工作原理和特点,光纤陀螺仪具有不同的分类。介绍了国外光纤陀螺仪的现状,预测了近期和长远的发展趋势,旨在对我国的光纤陀螺技术的发展能有所帮助。 关键词:光纤陀螺仪;萨格纳效应;干涉型;谐振式;布里渊式 中图分类号:TN2,T P2 文献标识码:A 文章编号:1000-9787(2005)06-0001-03 Devel op m ent status of fiber optic gyroscopes Z HOU H a i bo,LI U Jian ye,LA I Ji zhou,LI Rong b i n g (Navi gati on Res Cen ter,Nan jing Un iversity of Aeronau tics and A stronau tics,N an ji ng210016,China) Abstract:The fi ber opti c gyroscope(FOG)is c lassified i nto different types acco rd i ng t o its pr i nc i ple and character i sti c.The i n ternati onal status of FOG is i ntroduced and the short ter m and l ong ter m trend o f FOG i s forecast.It w ill be bene fit to t he course o f our FOG. K ey word s:FOG(fi ber optic gyro scope);Sagnac e ffect;i nterfero m e tric;resonan t;B rillou i n 0 引 言 光纤陀螺仪属于第四代陀螺仪 光学陀螺仪的一种,其基本工作原理基于萨格纳效应,即在同一闭合光路中从同一光源发出两束特征相同的光,沿相反的方向进行传播,汇合到同一探测点,产生干涉。若存在绕垂直于闭合光路所在平面的轴线相对惯性空间转动的角速度,则沿正、反方向传播的光束产生光程差,该差值与角速度成正比。通过光程差与相应的相位差的关系,可通过检测相位差,计算角速度。它一般由光纤传感线圈、集成光学芯片、宽带光源和光电探测器组成。与传统的机械陀螺仪相比,具有无运动部件、耐冲击、结构简单、启动时间短、灵敏度高、动态范围宽、寿命长等优点。与另一种光学陀螺仪 环形激光陀螺仪相比,光纤陀螺仪不需要光学镜的高精度加工、光腔的严格密封和机械偏置技术,能够有效地克服了激光陀螺的闭锁现象,易于制造。 本文从光纤陀螺仪的原理和优点出发,着重对光纤陀螺仪的分类、国外研究现状及其发展趋势做了详细的介绍,希望对我国的光纤陀螺的研制和发展有所裨益。 1 光纤陀螺仪的分类 光纤陀螺仪按照不同的分类标准,有不同的分类结果。按结构可分为单轴和多轴光纤陀螺,光纤陀螺的多轴化正是其发展方向之一。按其回路类型可分为开环光纤陀螺和闭环光纤陀螺两类,开环光纤陀螺不带反馈,直接检测光输出,省去许多复杂的光学和电路结构,具有结构简单、价格 收稿日期:2004-11-20便宜、可靠性高、消耗功率低等优点,缺点是靠增加单模光纤的长度来提高陀螺的灵敏度,输入-输出线性度差、动态范围小,主要用作角度传感器[1]。闭环光纤陀螺包含闭环环节,大大降低光源漂移的影响,扩大了光纤陀螺的动态范围,对光源强度变化和元件增益变化不敏感,陀螺漂移非常小,输出线性度和稳定性只与相位变换器有关[2],主要应用于中等精度的惯导系统,对光纤陀螺的小型化和稳定性有重要作用,是高精度光纤陀螺研究的主要趋势。 按照光学系统的构成可分为全光纤型和集成光学器件型。全光纤陀螺成本较低,但实现高精度的技术难度较大,大多用于精度要求不高和低成本的场合。集成光学器件光纤陀螺在信号处理中可以采用数字闭环技术,易于实现高精度和高稳定性,是目前最常用的光纤陀螺构成模式。 按照性能和应用的角度可分为速率级、战术级和惯性级等3个级别[3]。速率级光纤陀螺已经产业化,主要应用于机器人、地下建造隧道、管道路径勘测装置和汽车导航等对精度要求不高的场合。日本、法国等国家研制、生产的这种精度的陀螺仪,已大批量应用到民用领域。战术级光纤陀螺具有寿命长、可靠性高和成本低等优点,主要用于战术导弹、近程/中程导弹和商用飞机的姿态对准参考系统中。惯性级光纤陀螺主要是用于空间定位和潜艇导航,其开发和研制正逐步走向成熟,美国有关公司和研究机构是研制、生产该级别光纤陀螺的佼佼者,如H oneyw el,l N orthrop等公司。 1