运动估值块匹配算法的一种改进
运动估计算法比较
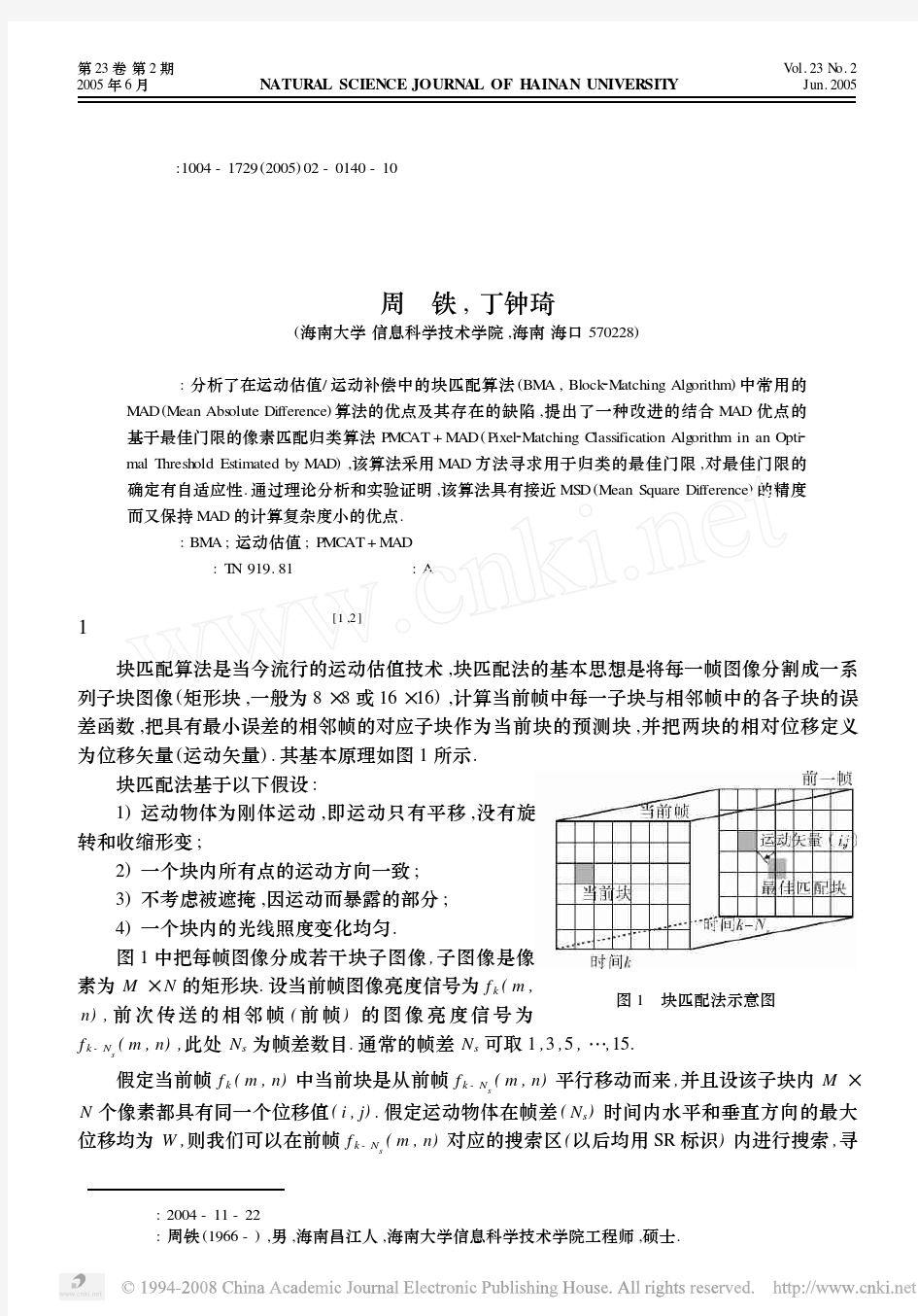
大作业 几种运动估计算法比较 一、实验内容 简要介绍各种运动估计算法,并比较不同运动估计算法的性能,主要考虑各算法的运算速度和精度。 二、实验背景 视频原始图像中存在着大量的信息冗余,如时间冗余、空间冗余、信息熵冗余、谱间冗余、几何结构冗余、视觉冗余和知识冗余等等。运动估计是视频压缩编码中的核心技术之一,采用运动估计和运动补偿技术可以消除视频信号的时间冗余以提高编码效率。如何提高运动估计的效率,使运动估计算法的搜索过程更健壮、更快速、更高效成为目前研究的热点。 运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。 运动估计算法多种多样,大体上可以把它们分成四类:块匹配法、递归估计法、贝叶斯估计法和光流法。其中块匹配运动估计算法因其具有算法简单、便于VLSI实现等优点得到广泛应用。所以本文将重点介绍块匹配运动估计算法,并对各种块匹配算法在计算速度和估计精度上进行简单比较。 三、实验原理 (一)、像素递归技术 像素递归技术是基于递归思想。在连续帧中像素数据的变化是因为物体的移位引起的,郑么如果沿着梯度方向在某个像素周圈的若干像素作迭代运算,运算会最后收敛于一个固定的运动估计矢量,从而预测该像素的位移。 (二)、块匹配运动估计 块匹配运动估计是把图像帧划分为若干互不重叠的块,并以块为单位寻找目标帧中每块在参考帧(上一帧或者其它帧)中最优匹配的块的相对位置,假设图像中每块的大小为M
模式匹配的KMP算法详解
模式匹配的KMP算法详解 模式匹配的KMP算法详解 这种由D.E.Knuth,J.H.Morris和V.R.Pratt同时发现的改进的模式匹配算法简称为KMP算法。大概学过信息学的都知道,是个比较难理解的算法,今天特把它搞个彻彻底底明明白白。 注意到这是一个改进的算法,所以有必要把原来的模式匹配算法拿出来,其实理解的关键就在这里,一般的匹配算法: int Index(String S,String T,int pos)//参考《数据结构》中的程序 { i=pos;j=1;//这里的串的第1个元素下标是1 while(i<=S.Length && j<=T.Length) { if(S[i]==T[j]){++i;++j;} else{i=i-j+2;j=1;}//**************(1) } if(j>T.Length) return i-T.Length;//匹配成功 else return 0; } 匹配的过程非常清晰,关键是当‘失配’的时候程序是如何处理的?回溯,没错,注意到(1)句,为什么要回溯,看下面的例子: S:aaaaabababcaaa T:ababc aaaaabababcaaa ababc.(.表示前一个已经失配) 回溯的结果就是 aaaaabababcaaa a.(babc) 如果不回溯就是 aaaaabababcaaa aba.bc 这样就漏了一个可能匹配成功的情况 aaaaabababcaaa ababc 为什么会发生这样的情况?这是由T串本身的性质决定的,是因为T串本身有前后'部分匹配'的性质。如果T为abcdef这样的,大没有回溯的必要。
运动估计算法简述
运动估计算法简述 标签:搜索运动估计预测矢量算法分类:探索H.2642007-02-03 13:59 马上要做运动估计算法,重点整理了一下这方面的内容。 帧间预测编码可以简单地分为单向预测、双向预测、多帧预测。而H.264 标准采用了多帧预测,参考帧可达5—15帧。 运动补偿采用较多的有运动矢量估计[重叠块运动补偿(OBMC)]、全局运动估计、基于象素点的运动估计、基于区域的运动估计、基于网格的运动估计。1.单向预测原理:将重建帧和参考帧送运动参数估值器(ME)比较得到运动矢量,再将运动矢量和重建帧送到运动补偿预测器中,得预测帧Ft^(x,y)。 Ft^(x,y)=Ft(x+i,y+j) 其中(i,j)即MV 2.基于块匹配算法的运动矢量估计 简单地说就是以块为单位分配运动矢量。在前一帧搜索区(M+2Wx,M+2Wy)内找到与当前帧块相匹配的块,位移d(i,j)即为运动矢量。 常用的块匹配准则有:均方误差(MSE)最小准则,绝对误差均值(MAD)最小准则、NCCF准则。 搜索方法: a.穷尽搜索计算(2Wx+1)×(2Wy+1)个MAD值,全局最优,计算量大。 b.快速搜索 (1)分层的和多分辨率的快速块匹配方法 (2)基于连续消除的快速块匹配方法 (3)固定搜索模式的快速块匹配方法(e.g.三步搜索法) (4)基于时空相关性和视觉特性的快速块匹配方法
3.重叠块运动补偿(OBMC) 为解决方块效应特别是运动矢量估计不准确或物体运动不是简单的平移运动以及一个块中有多个不同物体运动时的问题,采用OBMC方法,即一个像素的预测不仅基于其所属块的MV估计,还基于相邻块的MV估计。 4.运动估计 ?运动表示法: (1)基于块的运动表示法 帧间宏块分割区域大小的选择:大分区,表征MV的选择和区分割类型的比特数较少,但运动压缩的冗余度较高,运动补偿残差在多细节区域能量很高。小分区,运动补偿残差能量较低,但需要较多的表征MV的选择和区分割类型的比特数,运动压缩的冗余度较低。 一般策略:平缓区域大分区,多细节区域小分区。 树状结构运动补偿,宏块和子宏块各4种分割方法。 色度成分均为量度成分水平、垂直尺寸的1/2。 (2)亚像素位置的内插 亚像素运动矢量:亮度精度1/4,色度精度1/8 对亮度成分,用六抽头滤波器对整数像素点内插:左右相邻的6个像素的加权均值得1/2像素点,然后是线性滤波得到1/4像素点。 对色度块以类似方法得到1/4像素点,再次进行线性内插就得到1/8精度MV. (3)运动矢量在时空域的预测方式 空间 (1)运动矢量中值预测 (2)空间域的上层块模式运动矢量(最优) 时间 (1)前帧对应块运动运动矢量预测 (2)时间域的临近参考帧运动矢量预测 (4)匹配误差在时空域上的预测方式 H.264定义的匹配误差函数 J(MV,λMOTION)=SAD(s,c(MV))+λMOTION×R(MV-PMV)。 匹配误差在时空域的预测方式与运动矢量类似 空间 (1)中值预测 (2)上层预测 时间 (1)前帧对应块的预测 (2)时间域的临近参考帧预测(最优) ?运动估计准则分类: (1)MSE最小(2)MAD最小(3)NTD ——子集匹配法大大减少每帧图像的平均搜索时间 ?运动搜索算法 (1)全局搜索算法 (2)分数精度搜索算法 (3)快速搜索算法 1)二位对数搜索法 2)三步搜索法
关于快速高效的模式匹配算法的剖析与改进
关于快速高效的模式匹配算法的剖析与改进 摘要:模式匹配算法是现代化网络入侵检测中的关键环节,本文主要介绍了几种常用的模式匹配算法,并在此基础上,提出一种更快捷、更高效的改进方法,以提高模式匹配的效率与质量,确保网络安全。 关键词:模式匹配入侵检测改进 随着我国计算机与网络技术的飞速发展,网络应用已涉及到人们生产、生活的各个领域,其重要性日益凸显。随之而来的网络攻击问题也备受关注,给网络安全性带来挑战。传统的网络防御模式,主要采取身份认证、防火墙、数据加密等技术,但是与当前网络发展不适应。在此背景下,入侵检测技术营运而生,并建立在模式匹配基础上,确保检测的快捷性、准确性,应用越来越广泛。 1、模式匹配原理概述 模式匹配是入侵检测领域的重要概念,源自入侵信号的层次性。结合网络入侵检测的底层审计事件,从中提取更高层次的内容。通过高层事件形成的入侵信号,遵循一定的结构关系,将入侵信号的抽象层次进行具体划分。入侵领域大师kumar将这种入侵信号划分为四大层次,并将每一个层次与匹配模式相对应。以下将分别对四大层次进行分析: (1)存在。只要存在审计事项,就可以证明入侵行为的发生,并深层次挖掘入侵企图。存在主要对应的匹配模式就是“存在模式”。可以说,存在模式就是在固定的时间内,检查系统中的特定状态,
同时判断系统状态。 (2)序列。一些入侵的发生,是遵循一定的顺序,而组成的各种行为。具体表现在一组事件的秩序上。序列对应的是“序列模式”,在应用序列模式检测入侵时,主要关注间隔的时间与持续的时间。 (3)规则。规则表示的是一种可以扩展的表达方式,主要通过and 逻辑表达来连接一系列的描述事件规则。一般适用于这种模式的攻击信号由相关活动组成,这些活动之间往往不存在事件的顺序关系。 (4)其他。其他模式是不包含前面几种方法的攻击,在具体应用过程中,难以与其他入侵信号进行模式匹配,大多为部分实现方式。 2、几种常用的模式匹配算法 2.1 ac算法 ac算法(aho-corasick)是一种可以同时搜索若干个模式的匹配算法,最早时期在图书馆书目查询系统中应用,效果良好。通过使用ac算法,实现了利用有限状态自动机结构对所有字符串的接收过程。自动机具有结构性特征,且每一个前缀都利用唯一状态显示,甚至可同时应用于多个模式的前缀中。如果文本中的某一个字符不属于模式中预期的下一个字符范围内,或者可能出现错误链接的指向状态等,那么最长模式的前缀同时也可作为当前状态相对应的后缀。ac算法的复杂性在于o(n),预处理阶段的复杂性则在于o(m)。在采取ac算法的有限状态自动机中,应该在每一个字符的模式串中分别建立节点,提高该算法的使用效率与质量。目前,应用有限
字符串的模式匹配算法
在前面的图文中,我们讲了“串”这种数据结构,其中有求“子串在主串中的位置”(字符串的模式匹配)这样的算法。解决这类问题,通常我们的方法是枚举从A串(主串)的什么位置起开始与B串(子串)匹配,然后验证是否匹配。假设A串长度为n,B串长度为m,那么这种方法的复杂度是O(m*n)的。虽然很多时候复杂度达不到m*n(验证时只看头一两个字母就发现不匹配了),但是我们有许多“最坏情况”,比如: A=“aaaaaaaaaaaaaaaaaaaaaaaaab”,B=“aaaaaaaab”。 大家可以忍受朴素模式匹配算法(前缀暴力匹配算法)的低效吗?也许可以,也许无所谓。 有三位前辈D.E.Knuth、J.H.Morris、V.R.Pratt发表一个模式匹配算法,最坏情况下是O(m+n),可以大大避免重复遍历的情况,我们把它称之为克努特-莫里斯-普拉特算法,简称KMP算法。 假如,A=“abababaababacb”,B=“ababacb”,我们来看看KMP是怎样工作的。我们用两个指针i和j分别表示,。也就是说,i是不断增加的,随着i 的增加j相应地变化,且j满足以A[i]结尾的长度为j的字符串正好匹配B串的前j个字符(j当然越大越好),现在需要检验A[i+1]和B[j+1]的关系。 例子: S=“abcdefgab” T=“abcdex” 对于要匹配的子串T来说,“abcdex”首字符“a”与后面的串“bcdex”中任意一个字符都不相等。也就是说,既然“a”不与自己后面的子串中任何一字符相等,那么对于主串S来说,前5位字符分别相等,意味着子串T的首字符“a”不可能与S串的第2到第5位的字符相等。朴素算法步骤2,3,4,5的判断都是多余,下次的起始位置就是第6个字符。 例子: S=“abcabcabc” T=“abcabx”
实验三____串的模式匹配
实验三串的模式匹配 一、实验目的 1.利用顺序结构存储串,并实现串的匹配算法。 2.掌握简单模式匹配思想,熟悉KMP算法。 二、实验要求 1.认真理解简单模式匹配思想,高效实现简单模式匹配; 2.结合参考程序调试KMP算法,努力算法思想; 3.保存程序的运行结果,并结合程序进行分析。 三、实验内容 1、通过键盘初始化目标串和模式串,通过简单模式匹配算法实现串的模式匹配,匹配成功后要求输出模式串在目标串中的位置; 2、参考程序给出了两种不同形式的next数组的计算方法,请完善程序从键盘初始化一目标串并设计匹配算法完整调试KMP算法,并与简单模式匹配算法进行比较。 参考程序: #include "stdio.h" void GetNext1(char *t,int next[])/*求模式t的next值并寸入next数组中*/ { int i=1,j=0; next[1]=0; while(i<=9)//t[0] { if(j==0||t[i]==t[j]) {++i; ++j; next[i]=j; } else j=next[j]; } } void GetNext2(char *t , int next[])/* 求模式t 的next值并放入数组next中 */ { int i=1, j = 0; next[1]= 0; /* 初始化 */ while (i<=9) /* 计算next[i+1] t[0]*/ { while (j>=1 && t[i] != t[j] ) j = next[j]; i++; j++;
if(t[i]==t[j]) next[i] = next[j]; else next[i] = j; } } void main() { char *p="abcaababc"; int i,str[10]; GetNext1(p,str); printf("\n"); for(i=1;i<10;i++) printf("%d",str[i]); GetNext2(p,str); printf("\n"); for(i=1;i<10;i++) printf("%d",str[i]); printf("\n\n"); }
串的模式匹配算法实验报告
竭诚为您提供优质文档/双击可除串的模式匹配算法实验报告 篇一:串的模式匹配算法 串的匹配算法——bruteForce(bF)算法 匹配模式的定义 设有主串s和子串T,子串T的定位就是要在主串s中找到一个与子串T相等的子串。通常把主串s称为目标串,把子串T称为模式串,因此定位也称作模式匹配。模式匹配成功是指在目标串s中找到一个模式串T;不成功则指目标串s中不存在模式串T。bF算法 brute-Force算法简称为bF算法,其基本思路是:从目标串s的第一个字符开始和模式串T中的第一个字符比较,若相等,则继续逐个比较后续的字符;否则从目标串s的第二个字符开始重新与模式串T的第一个字符进行比较。以此类推,若从模式串T的第i个字符开始,每个字符依次和目标串s中的对应字符相等,则匹配成功,该算法返回i;否则,匹配失败,算法返回0。 实现代码如下:
/*返回子串T在主串s中第pos个字符之后的位置。若不存在,则函数返回值为0./*T非空。 intindex(strings,stringT,intpos) { inti=pos;//用于主串s中当前位置下标,若pos不为1则从pos位置开始匹配intj=1;//j用于子串T中当前位置下标值while(i j=1; } if(j>T[0]) returni-T[0]; else return0; } } bF算法的时间复杂度 若n为主串长度,m为子串长度则 最好的情况是:一配就中,只比较了m次。 最坏的情况是:主串前面n-m个位置都部分匹配到子串的最后一位,即这n-m位比较了m次,最后m位也各比较了一次,还要加上m,所以总次数为:(n-m)*m+m=(n-m+1)*m从最好到最坏情况统计总的比较次数,然后取平均,得到一般情况是o(n+m).
运动功能评定.doc
运动功能评定 一、肌力评定 肌力是指肌肉收缩的力量。肌力评定是测定受试者在主动运动时肌肉和肌群产生的最大收缩力量。肌力评定是对神经、肌肉功能状态的一种检查方法,也是评定神经、肌肉损害程度和范围的一种重要手段。 及评定分徒手肌力检查和器械肌力测定。 (一)徒手肌力的检查 1、概念根据受检肌肉和肌群的功能,当受试者处于不同的检查体 位,然后嘱其分别在去除重力、抗重力和抗阻力的条件下做一定的动 作,按照动作的活动范围及抗重力和抗阻力的情况将肌力进行分级。2、标准国际上普遍应用的图,手机的检查方法是Lovett6 级分级 法。 1983 年,美国医学研究委员会在此分级基础上进一步细分,即 MRC肌力分级法,表3-1肌力评定标准 分级评级标准 5肌肉抗最大阻力,活动关节达到全范围 - 5肌肉抗较大阻力,活动关节达到全范围 + 4肌肉抗比中等度稍大的阻力,活动关节达到全范围 4肌肉抗中等度阻力,活动关节达到全范围 4-肌肉抗比中度稍小的阻力,活动关节达到全范围 + 肌肉抗重力时活动关节达到全范围,肌肉抗较小阻力时活动关节达到部分范围3 3肌肉抗重力,活动关节达到全范围 3-肌肉抗重力,活动关节达到最大范围的50%以上 + 肌肉减重活动关节达到全范围,肌肉抗重力活动关节达到最大范围的50%以 下 2 2 肌肉减重活动关节达到全范围 - 肌肉减重活动关节达到最大范围的50%以上 2 1+ 肌肉减重活动关节达到最大范围的50%以下 1可触及肌肉收缩,但无关节运动 0没有可以测到的肌肉收缩
肢体肌群的手法肌力检查方法表3-2。 表 3-2上肢和下肢主要肌肉的手法肌力检查 肌检查方法 群 1 级 2 级 3 级 4 级 5 级 肩仰卧,试向对侧侧前图屈肩时卧,上侧屈可触及三上肢放在滑肌角肌前部板上,肩可群收缩主动屈曲坐位,肩内坐位,肩内旋,坐位,肩内旋,掌心向掌心向下,阻旋,掌心向下,可克服重力加于上臂下,阻力加于力屈肩远端,能抗中上臂远端,能 等阻力屈肩抗较大阻力 屈肩 肩仰卧,试同左,上肢坐位,屈肘肩坐位,屈肘,坐位,屈肘,外图肩外展放在滑板外展 90°,可肩外展 90°,肩外展 90°,展时可触及上,肩主动克服重力外阻力加于上臂阻力加于上肌三角肌收外展展远端,能抗中臂远端,能抗群缩等阻力较大阻力 屈坐位,肩同左,肘可坐位,上肢下坐位,上肢下坐位,上肢下肘外展,上主动屈曲垂;前臂旋后垂;前臂旋(检垂;前臂旋后肌肢放在滑(检查肱二查肱二头肌)(检查肱二群板上;试头肌)或旋(或旋前(检查头肌)或旋前图肘屈曲检查肱肌)或肱肌)或中立(检查肱
高效的多模式匹配算法
东方企业文化·百家论坛 2011年9月 163 高效的多模式匹配算法 马 力 (重庆青年职业技术学院,重庆,400712) 摘 要:本文提出一种新的多模式匹配算法,以提高匹配检测的执行速度和效率。该算法采用了基于集合的多模式匹配思想,重新构造了HASH 函数以便在处理大规模模式集时执行时间能比传统的匹配算法的执行时间要少。经过实验证明,运用该算法不仅具有时间复杂度较低的优点,且与传统算法相比具有更为优越的性能,同时在实际工作状态下的检测能力也更强大。 关键词:多模式匹配 HASH 函数 中图分类号:TP393 文献标识码:A 文章编号:1672—7355(2011)09—0163—01 一、算法描述 通常在自然文本中,经常会发生所谓的坏字符移动。此时会极大提高Boyer-Moore 算法的检测效率。但是当文本与多个模式进行匹配时,文本中的多数字符都可能与某些模式的最后一个字符相匹配(即匹配冲突),这时发生坏字符移动的可能性就非常小了。本文提出的算法解决了如何在上述情况下继续保持Boyer-Moore 算法的实质与效率的问题,采用散列(Hash )技术和高效过滤等方法,减小了匹配冲突对算法执行效率的影响。算法描述如下: 首先,算法需要计算出模式的最小长度,设其值为m ,为简化算法描述,假定所有模式均具有相同的长度,同时保证最小长度合理以免影响匹配效率。 假设P 为模式的集合,P={P 1P 2……P K },K=|P|,P 中所有模式的长度均为m 。T 为网络数据包,T=t 1t 2……t n (n ≧m )。 选取Q 为足够大空间的常数,定义长度为m 的支字符串R=r 1r 2……r m ,则构造出R 的Hash 函数:∑=?=m i i m i S r Q R Hash 1mod )(,其中S 为上文所提的模式的P 集合。 二、算法流程设计 1. 预处理阶段 首先需要对模式进行排序,形成有序模式链表;然后主要完成三张表(SHIFT 表、HASH 表和PREFIX 表)的创建。SHIFT 表主要用于确定扫描文本时可移动的字符数。根据SHIFT 表中的取值分为两种处理情况:SHIFT[i ]≠0:直接根据SHIFT[i ]中的取值,确定移动的字符数。SHIFT[i ]=0:即前面提到的匹配冲突。此时需要根据HASH 表和PREFIX 表确定匹配的候选模式并最终核实该模式。 (1)SHIFT 表的创建在此处起到与Boyer-Moore 算法中相同的移动指示作用,只不过移动字符的数目基于长度为B 的字符块。假设SHIFT 表中包含了每个大小为B 的字符串的入口,那么它的大小为|∑|B 。为了减少表存储空间,采用了散列函数,将每个长度为B 的字符串映像为一个索引SHIFT 表的整数。设X=x 1x 2……x b 为文本中的b 个字符串,并假设X 已经被映像为SHIFT 表中的一个入口,则过程SHIFT Table Set Value ()有以下两种情况: X 不属于substring (P ) :SHIFT[i]=m-B+I ; X 属于substring (P ) :SHIFT[i]=m-q ; (q 为P i 中X 发生匹配的最右端位置)。 SHIFT 表中的所有初始值均为m-B+1,考虑每个模式 P=P 1P 2……P K ,将每个大小为i j B j B j P p p p B )(21"+?+?的子 串映像到SHIFT 表中。 通常情况下,SHIFT 表项的取值总是大于0,因此能够成功地跳过文本块并继续扫描文本。但是当模式数量增多时,情况就完全不同了。当模式数量增多时,SHIFT 表项取值为0的概率也呈线性递增趋势,即发生匹配冲突的可能性越来越大。本文设计的该算法的核心思想就是采用散列技术来最小化需要处理模式的数目,避免与模式链表中的每个模式逐一进行匹配,同时结合PREFIX 表的过滤作用,加速搜索过程。 (2)HASH 表的创建创建HASH 表,并使用前面计算出的用于索引SHIFT 表的B 个字符串映像整数作为该表的索引。设HASH 表的第i 个入口为HASH[i],它包含了一个指向最后B 个字符散列值为i 的模式链表的指针。链表PAT_POINT 用于存储指向模式的指针,每个模式按其最后B 个字符的散列值大小排序。设h 为文本当前后缀的散列值,并假设SHIFT[i ]=0,此时HASH[h]的取值指针p 指向散列值为h 的模式链表首部。为查找链表尾,指针不断递增直至它等于HASH[h+1]。如果SHIFT[i ]≠0,则有HASH[h]= HASH[h+1],因为不存在后缀散列值为h 的模式。 (3)PREFIX 表的创建多模式中肯定会出现相同后缀的情况,导致HASH 表冲突,即所有具有相同后缀的模式将映像到HASH 表中的同一入口。为了加快在相同后缀中查找确切匹配模式的速度,算法还引入了用于区分这些模式的一个称为PREFIX 的表。除了将所有模式的后B 个字符做一映像之外,还须将所有模式的前B 个字符映像到PREFIX 表中。 如果发现SHIFT 值为0,并且要在HASH 表中确定是否存在匹配,那么就在PREFIX 表中检查该值。对每个后缀而言,HASH 表不仅包含具有所有此后缀的模式,而且还包含了他们相应的前缀。可以通过左移m-B 个位置计算出文本中的相应前缀,并用它来过滤那些后缀相同但是前缀不同的模式。 2. 扫描阶段 扫描阶段的流程如下:(1)计算tm-B+1到tm 的基于文本当前B 个字符的散列值h ;(2)检查SHIFT[h]的取值,如大于0,移动文本返回(1),否则转至(3);(3)从当前位置向左m 个字符处开始计算文本中的前缀散列值,称为文本前缀;(4)检查每个p ,SHIFT[h]≦p <HASH[h+1],是否有PREFIX[P]=text-prefix 。如果相等,那么就直接检查与文本相对应的实际模式(由PAT_POINT[p]给出)。 参考文献: [1] Crosbie , Gene Spafford. Defending a Computer System using Autonomous Agent[R].COAST Technical Report No.95-022, March 1994. [2] Aho A , Corasick M. Efficient String Matching an Aid to Bibliographic Search [J]. Communication of the ACM , 1975, 18(6) : 333-340.
基于块的全搜索运动估计算法实现实验报告
数字视频处理实验报告 学院:通信与信息工程学院 系班:电信科0901班 姓名: 学号: 时间:2012 年11月23号
一、实验名称:基于块的全搜索运动估计算法实现 二、实验目的: 1、掌握运动估计算法的实现原理。 2、掌握运动估计算法的研究现状及多种计算方法。 3、学习基于块的全搜索运动估计算法,研究分析其Matlab实现 程序过程,并补充完成程序,对实验结果进行分析比较。 三、实验要求 三、实验要求 1、对实验程序motionEstAnalysis.m进行分析,完成主程序流程图。 函数流程图: 2、编写补充完成部分不全程序代码,调试程序使其能正确运行 (1) motionEstES( ) % Computes motion vectors using exhaustive search method(全搜索法计算运动矢量) % % Input % imgP : The image for which we want to find motion vectors(当前图像) % imgI : The reference image(参考图像) % mbSize : Size of the macroblock(宏块尺寸) % p : Search parameter (read literature to find what this means)(搜索参数) % % Ouput % motionVect : the motion vectors for each integral macroblock in imgP (当前图像中每一个积分宏块的运动矢量) % EScomputations: The average number of points searched for a macroblock(每个宏块搜索的平均点数) % % Written by Aroh Barjatya
基于线性搜索的快速运动估计算法
第38卷 第2期2004年2月 西 安 交 通 大 学 学 报 J OU RNAL OF XI′AN J IAO TON G UN IV ERSIT Y Vol.38 №2 Feb.2004基于线性搜索的快速运动估计算法 丁贵广,郭宝龙 (西安电子科技大学机电工程学院,710071,西安) 摘要:为了减小快速运动估计算法的计算复杂度和提高运动补偿的准确性,提出了一种新的块匹配运动估计算法,称为线性正方形搜索算法.该算法采用运动估计的线性搜索策略,对于不重要的搜索区域利用线性搜索技术进行快速搜索以减小算法的计算复杂度,而对于重要搜索区域,即最佳点所在区域,用9点的正方形模块进行精细搜索以提高算法的搜索精度.实验结果证明,该算法与菱形算法相比不仅计算复杂度减小了10%以上,而且视频编码效率可以提高约011dB. 关键词:块匹配算法;运动估计;线性搜索;视频编码 中图分类号:TP391 文献标识码:A 文章编号:0253-987X(2004)02-0136-04 N e w F ast Motion Estimation Algorithm B ased on Line Search Di ng Guiguang,Guo B aolong (School of Electromechanical Engineering,Xidian University,Xi′an710071,China) Abstract:In order to reduce the computational complexity of the fast motion estimation and improve the accuracy of motion compensation,a new block2matching algorithm called line2square search(L SS)algorithm was pro2 posed,in which the strategy of the line search was introduced.The L SS algorithm performed the line search for the unimportant area to reduce the computation complexity.For the important search area in which optimal points were existed,a square search pattern consisted of9checking points was used to carry out the refined search,thus the search accuracy and the prediction quality were https://www.360docs.net/doc/6413404162.html,pared with the diamond search algorithm,experimental results showed that the computational complexity could be reduced up to10%and the coding efficiency could be increased about011dB by the L SS algorithm. K eyw ords:block2m atchi ng al gorithm;motion esti m ation;li ne search;vi deo codi ng 对于视频序列图像,由于相邻帧之间存在很大的时间相关性,即时间冗余,所以通过减少时间冗余,可以大幅度提高视频编码的效率.基于块匹配的运动估计算法是一种有效的方法,它已经被许多视频编码标准所采纳[1,2].在块匹配运动估计算法中,全搜索(FS)算法精度最高,但由于它要对搜索区内的每个搜索点进行检测,因此计算复杂度高,软硬件实现困难.后来人们相继提出了许多快速搜索算法,如三步法(TSS)[3]、四步法(FSS)[4]、二维对数法(TDL)[5]、基于块的梯度下降法(BB G DS)[6]、交叉法(CS)[7]和菱形法(DS)[8,9\〗等,它们通过设计不同的搜索模板和搜索策略,在计算复杂度上比FS 减小了许多,但搜索的准确性比不上FS.因此,有必要寻找更加高效的块匹配运动估计算法. 本文在分析运动矢量和绝对差和(Sum of Ab2 solute Difference,SAD)的空间分布特性的基础上,设计了一种新的搜索算法———线性正方形搜索算法(Line2Square Search,L SS).实验结果表明,本文提出的L SS算法在计算复杂度和准确性上都明显优于DS等块匹配算法. 收稿日期:2003-05-05. 作者简介:丁贵广(1976~),男,博士生;郭宝龙(联系人),男,教授,博士生导师. 基金项目:国家自然科学基金资助项目(69975015);教育部优秀青年教师计划资助项目.
运动估计算法MATLAB课程设计
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 运动估计算法 初始条件: MATLAB软件平台 要求完成的主要任务: 1.设计任务 设计视频压缩系统中的运动估计算法:全搜索法(FS: Full Search)和三步法(TSS: Three Step Search),比较二种方法的搜索点和每帧的峰值信噪比(PSNR:peak signal to noise ratio) 2.设计要求 编制算法代码;对视频进行运动估计;计算PSNR 时间安排: 答辩时间2013年1月24日。 指导教师签名:年月日 系主任签名:年月日
摘要 (1) 1运动估计算法概念 (2) 1.1 运功估计算法基本思想 (2) 1.2 运动估计算法实验原理 (2) 2 设计原理和方法 (3) 2.1 三步法 (3) 2.2 新三步法 (3) 2.3 全搜索法 (4) 2.4 峰值信噪比 (5) 3 运动估计算法的MATLAB编程 (6) 3.1全搜索法 (6) 3.2三步法 (9) 3.3全搜索法指标 (11) 3.4三步法指标 (11) 3.4仿真结果分析 (11) 4 小结与体会 (11) 参考文献 (11) 附录 (12)
运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动 矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。 在视频编码和处理系统中,运动估计和运动补偿技术对降低视频序列时间冗余度、提高编码效率起着非常关键的作用。运动估计的准确程度将直接决定视频 编码器的编码效率。 关键词:运动估计、运动补偿技术、位移(运动)矢量 Abstract The basic idea is that the motion estimation as accurate as possible the image sequence interframe motion displacement, i.e. the motion vector. Motion estimation more accurate prediction compensation, the higher the image quality is compensated residuals is smaller, less compensation coding bits required, the smaller the transmission bit rate. Performing motion compensation using the motion vector obtained in the interframe. Compensation residuals through transformation, quantization, entropy-coded together with the motion vector is encoded, and then sent out in the form of a bit stream. In video coding and processing system, the motion estimation and motion compensation to reduce the temporal redundancy of video sequence to improve the coding efficiency plays a crucial role. The degree of accuracy of the motion estimation will directly determine the encoding efficiency of the video encoder. Keywords:Motion estimation Motion compensation techniques The vector of displacement (movement)
基于WM算法改进的多模式匹配算法
第29卷第4期吉林大学学报(信息科学版)Vol.29No.4 2011年7月Journal of Jilin University(Information Science Edition)July2011 文章编号:1671-5896(2011)04-0383-05 基于WM算法改进的多模式匹配算法 董迎亮a,玄雪花a,王德民b (吉林大学a.计算机科学与技术学院;b.网络中心,长春130012) 摘要:为提高入侵检测系统整体的性能和效率,在研究经典的WM(Wu-Manber)多模式匹配算法的基础上,提出一种改进的WM多模式匹配算法。该算法使用后缀表方法,减少了匹配过程中模式字符串与文本的比较 次数。实验结果表明,该算法有效提高了入侵检测系统匹配的速度和效率。 关键词:入侵检测;多模式匹配;Wu-Manber算法 中图分类号:TP393.08文献标识码:A Improved Multiple Patterns Matching Algorithm Based on WM Algorithm DONG Ying-liang a,XUAN Xue-hua a,WANG De-min b (a.College of Computer Science and Technology;b.Network Center,Jilin University,Changchun130012,China) Abstract:To improve the efficiency of intrusion detection system,we analyzed WM(Wu-Manber)multiple patterns matching algorithms,and then presented an improved patterns matching algorithm.This algorithm uses trail table to decrease the comparison times in matching process.The experiment result shows that it improves the intrusion detection system matching efficiency. Key words:intrusion detection;multiple patterns matching;Wu-Manber algorithm 0引言 随着计算机网络技术的飞速发展,网络安全也受到人们越来越多的关注。为了更全面地保护网络环境,仅靠传统的防火墙技术已经不能完全满足网络安全的需求。入侵检测技术被公认为是防火墙之后的第二道安全闸门,可以弥补防火墙技术明显的不足,为网络安全提供实时的入侵检测以及相应的防护手段。 在高速网络环境中,如果模式匹配算法不能满足处理大量实时网络数据包的要求,入侵检测系统必然会丢弃部分网络数据包,而这些被丢弃的数据包中就可能包含入侵信息。由于模式匹配算法的性能直接影响入侵检测系统的检测效率,笔者将以基于误用检测技术的模式匹配算法为研究目标,提出一种改进后的WM多模式匹配算法。该算法与原WM(Wu-Manber)算法相比具有运算效率高的优点。 1模式匹配算法 模式匹配[1-7]是指在给定长度为n的文本串T=T[1]T[2]…T[n]中查找长度为m的模式串P= P[1]P[2]…P[m]的首次出现或多次出现的过程,其中T[i](1≤i≤n),P[j](1≤j≤m)∈∑(字符集)。若在T中能找到P的出现,则称匹配成功;否则称匹配失败。一次在文本中只能对一个模式串进行匹配的算法,称为单模式匹配算法,可同时对多个模式串进行匹配的算法称多模式匹配算法。 收稿日期:2011-04-13 作者简介:董迎亮(1982—),男,长春人,吉林大学硕士研究生,主要从事计算机网络安全研究,(Tel)86-136********(E-mail)liangdyl @https://www.360docs.net/doc/6413404162.html,;王德民(1958—),男,长春人,吉林大学教授,硕士生导师,主要从事智能网络与数据库、网络安全研究 (Tel)86-138********(E-mail)wdm@https://www.360docs.net/doc/6413404162.html,。
串的朴素模式匹配算法(BF算法)
//算法功能:串的朴素模式匹配是最简单的一种模式匹配算法,又称为 Brute Force 算法,简称为BF算法 #include
int main() { SString S, T; int m; char strs1[MAXL]; //建立主串S char strs2[MAXL]; //建立模式串T printf("请输入主串和子串:\n"); printf("主串S: "); scanf("%s", strs1); printf("子串T: "); scanf("%s", strs2); StrAssign(S, strs1); StrAssign(T, strs2); m = Index(S, T, 1); if(m) printf("主串 S = {%s}\n子串 T = {%s}\n在第 %d 个位置开始匹配!\n", strs1, strs2, m); else printf("主串 S = {%s}\n子串 T = {%s}\n匹配不成功!\n", strs1, strs2); return 0; }
视频信号的运动估计和运动补偿算法
数字视频实验报告 班级:电信科0801班 学号: 姓名:
实验报告二 一、实验名称:视频信号的运动估计和运动补偿算法 二、实验目的 在视频编码和处理系统中,运动估计和运动补偿技术对降低视频序列时间冗余度、提高编码效率起着非常关键的作用。运动估计的准确程度将直接决定视频编码器的编码效率。它极大地消除了视频序列的帧间相关性。运动估计算法的复杂性将直接决定视频压缩编码系统的复杂性,如何提高运动估计的效率,使运动估计算法的搜索过程更快速、更高效一直是人们研究的热点。掌握运动估计的块匹配算法,以及快速运动估计算法。 三、实验内容: 1、分析基于块匹配的全搜索运动估计算法程序,画出 motionEstAnalysis.m 和 motionEstES.m文件流程图 2、编程补充完成costFuncMAD.m 文件中最小绝对误差计算函数 costFuncMAD()和imgPSNR.m文件中峰值信噪比PSNR计算函数imgPSNR()的程序,最终输出运动矢量场; 3、掌握运动补偿算法,编程实现motionComp.m文件中对目标帧的运 动补偿重构函数 motionComp(); 4、了解多种快速运动估计算法,例如三步法搜索法、二维对数法、
菱形搜索法等。 5、总结实验结果,比较各种搜索算法的性能和所需时间。 四、实验原理 在帧间预测编码中,由于活动图像邻近帧中的景物存在着一定的相关性。因此,可将活动图像分成若干块或宏块,并设法搜索出每个块或宏块在邻近帧图像中的位置,并得出两者之间的空间位置的相对偏移量,得到的相对偏移量就是通常所指的运动矢量,得到运动矢量的过程被称为运动估计。 运动矢量和经过运动匹配后得到的预测误差共同发送到解码端,在解码端按照运动矢量指明的位置,从已经解码的邻近参考帧图像中找到相应的块或宏块,和预测误差相加后就得到了块或宏块在当前帧中的位置。 运动估计的准确程度往往用补偿图像与原图像比较的PSNR来衡量表示。 五、实验程序 1、motionEstAnalysis.m文件流程图