基于DDK的TLV320AIC23型编解码器的驱动设计
基于DDK的TLV320AIC23型编解码器的驱动设计
作者:范学锋,吴成柯时间:2007-01-26 来源:《国外电子元器件
1 引言
tlv320aic23是ti公司推出的一款高性能立体声音频编解码器,内置耳机输出放大器,支持mic和line in二选一的输入方式,输入和输出都具有可编程的增益调节功能。tlv320aic23的模/数转换器(adc)和数/模转换器(dac)集成在芯片内部,采用先进的σ-δ过采样技术,可以在8khz至96khz的采样率下提供16bit、20bit、24bit 和32bit的采样数据。adc和dac的输出信噪比分别可达90db和100db。同时,
tlv320aic23还具有很低的功耗(回放模式为23mw,节电模式为15μw)。上述优点使得tlv320aic23成为一款非常理想的音频编解码器,与ti的dsp系列相配合更是相得益彰。
dsp/bios driver developer’s kit(ddk)是ti为简化驱动程序开发为tms320系列dsp及其evm板等提供的驱动程序开发套件。该套件为tms320系列各种外围器件提供完整的标准化驱动程序模型,使得驱动程序可以很方便地移植到其他应用中,大大提高驱动程序开发的效率。ddk是对每种tms320系列dsp都提供的芯片支持库(clip support library-csl)的补充,csl提供对外围器件寄存器配置及初始化等的低级控制,ddk完全通过csl对外围器件进行控制。简单的说,ddk建立在csl上层,所以用ddk来开发驱动程序将更为快捷且可移植性更好。
ddk为开发驱动程序定义了标准模型和一系列的api。为简化程序设计,标准模型又被分为二个层次,其中高层称为class driver,低层称为mini-driver。class driver
与器件相对独立,完成诸如缓冲区管理和请求同步等功能,同时扮演着与api和mini -driver二者接口的角色。mini-driver完成特定的器件初始化和控制功能,它符合iom(i/o mini-driver)的接口标准。ddk的这种分层结构使得驱动开发人员仅需了解单一的mini-driver api就可以完成整体外围器件的驱动设计,而且这一过程比设计整个驱动程序要简单得多,因为class driver控制了缓冲区管理和同步等。ddk提
供3种class driver,分别为sio/dio、pip/pio和gio,它们都可以和任何mini-driver 结合使用。
2 tlv320aic23的驱动设计基础
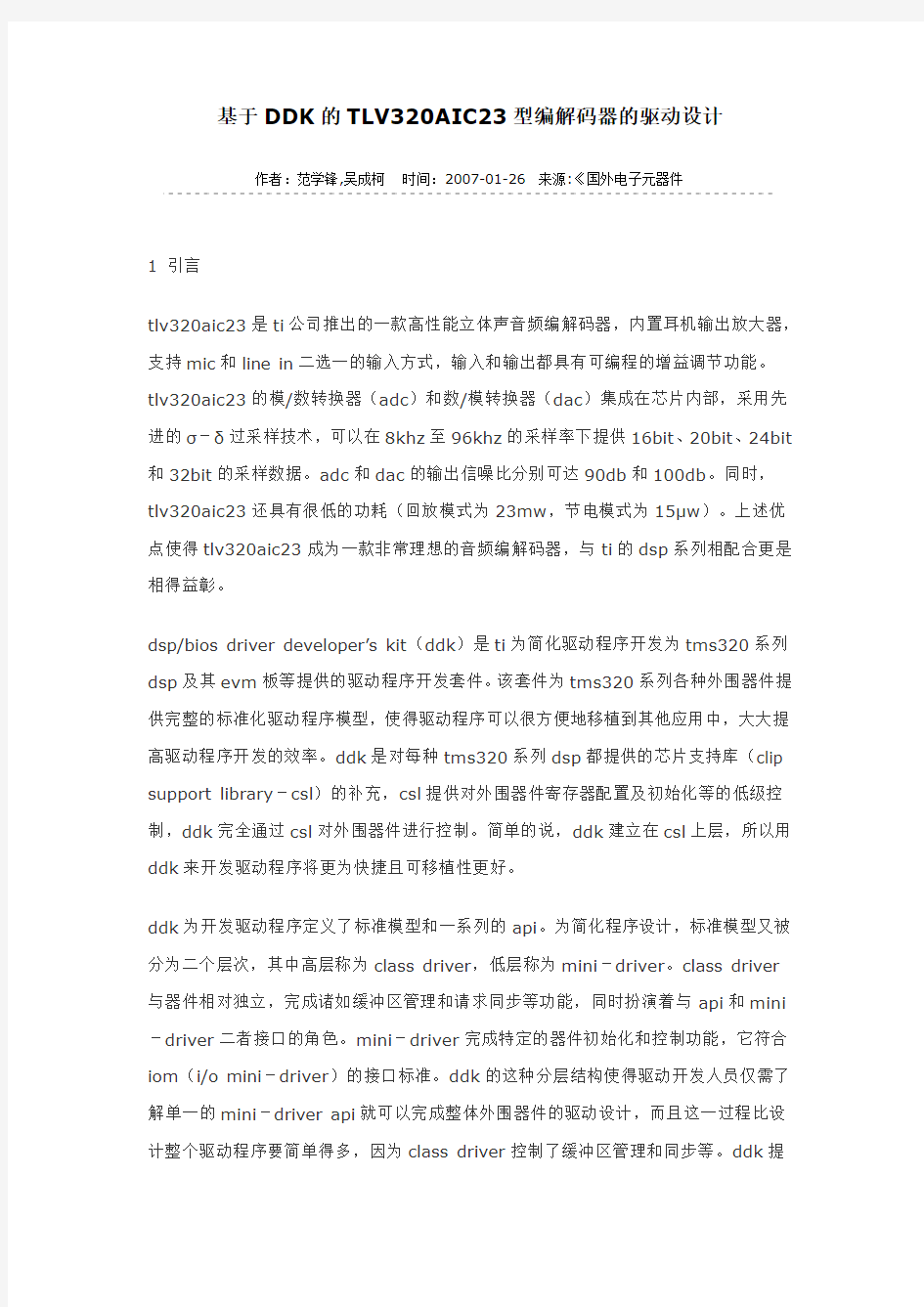
ddk的标准模型结构如图1所示,高层的应用和低层驱动相互没有直接的关联,开发中只需通过class driver控制mini-driver。
下面以dm642 evm板为例,说明基于ddk的tlv320aic23的驱动程序设计方法。
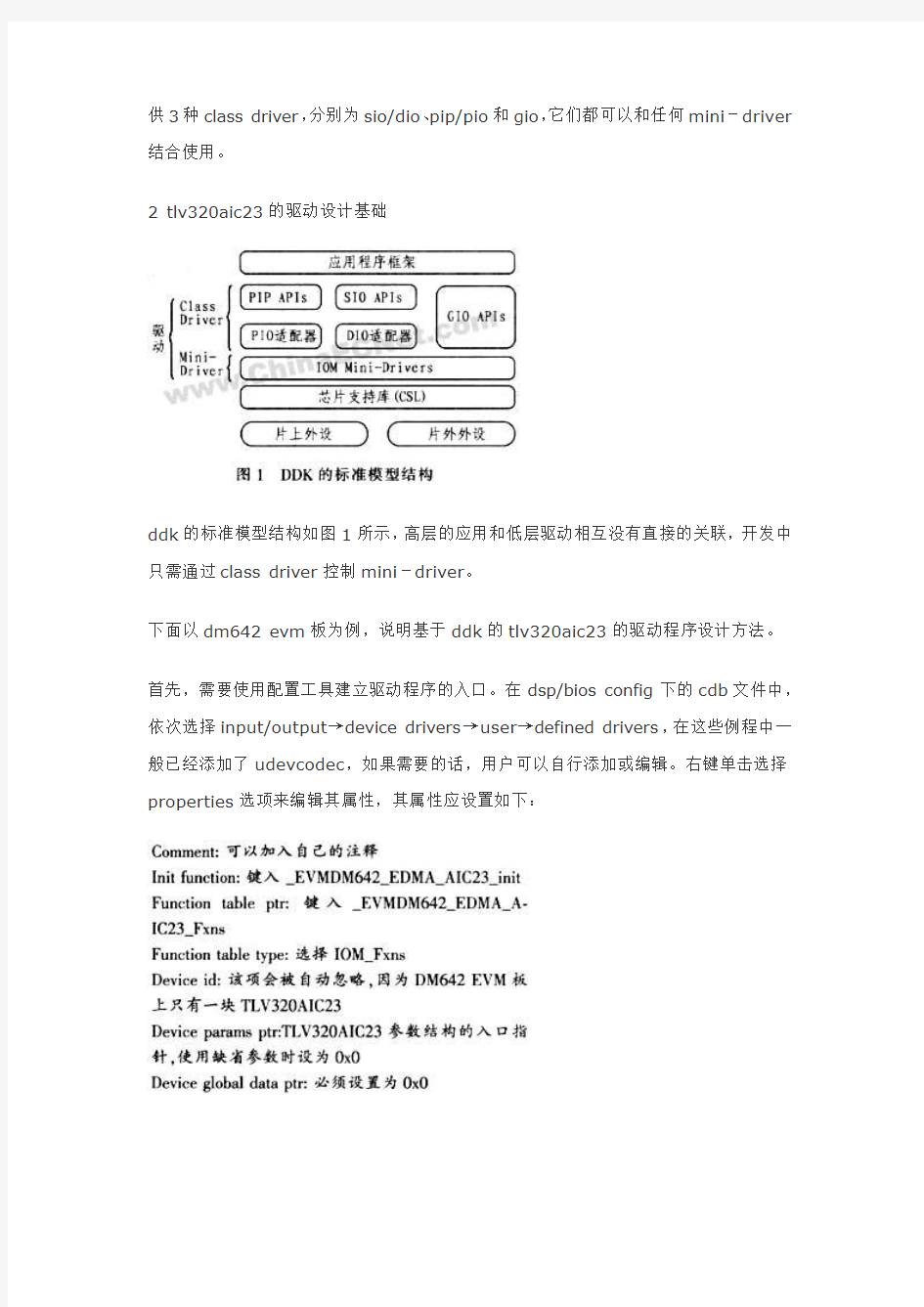
首先,需要使用配置工具建立驱动程序的入口。在dsp/bios config下的cdb文件中,依次选择input/output→device drivers→user→defined drivers,在这些例程中一般已经添加了udevcodec,如果需要的话,用户可以自行添加或编辑。右键单击选择properties选项来编辑其属性,其属性应设置如下:
正确配置驱动程序入口后,就要按照需要设置相关的参数,下面具体讨论tlv320aic23参数的设置。
tlv320aic23的参数结构体原型如下:
typedef struct
在一般应用中,上述结构体的大多数参数无需更改,需要修改的主要是aic23config,他是tlv320aic23控制寄存器值,需要通过它来控制tlv320aic23的工作模式、输入输出选择、采样率等重要参数。
除了复位寄存器外,tlv320aic23共有9个控制寄存器,每个寄存器控制字长为9bit,地址位为7bit,共有16bit。地址位为高7位而控制字在低9位。具体如下:register 0:左声道输入音量控制,缺省值为0x0017
register 1:右声道输入音量控制,缺省值为0x0017
register 2:左声道输入音量控制,缺省值为0x01f9
register 3:右声道输入音量控制,缺省值为0x01f9
register 4:模拟音频通道设置,缺省值为0x0011
register 5:数字音频通道设置,缺省值为0x0000
register 6:节电模式控制,缺省值为0x0000
register 7:数字音频接口格式控制,缺省值为0x0043
register 8:采样率控制,缺省为48khz,对dm642 evm板,缺省值为0x0002 register 9:数字音频接口激活开关,缺省值为0x0001
通常情况下需要修改的寄存器包括4号和8号寄存器,即选择是mic输入还是由line in 输入和根据需要选择采样率。这2个寄存器的详细配置如下:
4号寄存器配置见表1,其中,d2位insel(input select for adc)是输入选择,“0”为line in;“1”为mic。d1位micm(microphone mute)是mic静音开关,为“1”表示静音。d0位micb(microphone boost)如设置为“1”将为mic输入提供20db 的增益。
8号寄存器配置见表2,其中,采样率控制位为d5-d2的sr[3:0]。对于dm642 evm 板,设置方式见表3。
可见,需要通过4号寄存器的d2来选择输入,同时考虑d1和d0对mic的控制,采样率的控制通过设置8寄存器的sr[3:0]来实现。
3 tlv320aic23的驱动配置方法
很多初学者在运行dm642 evm的echo或其他音频例程时,最容易碰到的问题是通过line in输入时有输出,而通过mic输入时没有输出,更不要说改变采样率了,即使参考资料编辑aic23.h和emvdm642_edma_aic23.h修改default参数仍然无法解决。
出现这样的问题时,首先要了解tlv320aic23的模拟音频输入为mic和line in二选一的,其次要知道如何能够正确配置tlv320aic23的参数使之满足特定应用的需要。如果仔细分析echo例程和其他音频例程的话,可以发现只有在echo例程和中包含了aic23.h和emvdm642_edma_aic23.h 2个头文件。其实在echo例程中,所包含
的这2个头文件和tlv320aic23的初始化语句实际并未使用。如果屏蔽掉对这2个头文件的包含以及tlv320aic23的初始化语句,会发现编译后仍然能够正常运行。实际上echo例程中tlv320aic23初始化语句只是提供了对tlv320aic23进行配置的一种方法而并未直接使用,该方法在ddk包的emvdm642部分说明文件中也已提及。
由于在echo例程中初始化驱动程序入口和其他的音频例程一样使用了默认参数,而默认参数是通过调用ddk包中的evmdm642_edma_aic23.164库获得的,该库不变则配置也不变,于是就会出现上述问题。
在明确了以上原理后,通过实践证明,本文提供的以下三种配置方法可以适应各种应用。
方法一
既然默认参数是通过调用evmdem642_edma_aic23.164库获得的,那么自然可以通过修改该库来达到修改参数的目的。ti提供的ddk包中包含了各种库的源代码,这使得修改库文件成为可能。本文用到的库生成工程是ti\ddk\src\audio\evmdm642目录下的evmdm642_edma_aic23_64.pjt,只需要打开该工程,修改其中aic23.h 及中的默认参数,重新编译就能生成新的库文件地这样,所有的音频例程都会默认按修改过的参数运行。
这种方法合适tlv320aic23参数配置相对固定的应用场合。配置完全通过调用evmdm642_edma_aic23.164库初始化时进行,不用在应用工程文件中添加任何附加代码,使得工程文件更简洁,可移植性更高。
方法二
自定义符合标准结构evmdm642_edma_aic23_devparams的结构体,例如:
然后将“_my params”作为device params ptr在指定入口指针时替代默认的0x0。这就符合ti推荐的方法,在echo例程中的相关代码也说明了这种方法。
这种方法能够适应几乎任何使用情况,初始化参数自定义非常明确,代码易读性较高,但是不建议像echo例程中那样直接包含默认参数的头文件,最好参照该头文件定义自己的结构体。
方法三
通过仔细分析生成evmdm642_edma_aic23.164库的源代码,可以发现对
tlv320aic23寄存器的设置是通过aic23_setparams()函数来完成的,在大多数情况下,只要修改寄存器值而不必修改标准结构
evmdm642_edma_aic23_devparams结构体中的其他变量,所以可以调用
aic23_setparams()函数来完成对tlv320aic23参数的配置。这样就只需要定义1个符合标准的寄存器数组,将数组名作为参数来调用aic23_setparams()函数就可以达到目的。
这种方法使用灵活,代码长度很短,含义非常明确,可以用不同参数多次调用,尤其适用于tlv320aic23参数可变的特殊场合。
4 结束语
笔者在实际工作基础上对tlv320aic23参数配置提出了3种方法,各有特点且都十分实用。在进行基于ddk的tlv320aic23驱动程序设计时,可以根据需要方便地选用。
通信编解码器设计
天津大学 课程设计任务书 2012 —2013 学年第 1 学期 电子与信息工程系电子信息工程专业 课程设计名称: EDA技术及应用 设计题目:通信编解码器设计 完成期限:自 2013 年 1月 4 日至 2013 年 1 月 10 日共 1 周 一.课程设计依据 在掌握常用数字电路原理和技术的基础上,利用EDA技术和硬件描述语言,EDA开发软件(Quartus Ⅱ)和硬件开发平台(达盛试验箱CycloneⅡFPGA)进行初步数字系统设计。 二.课程设计内容 采用状态机结构设计简易串行数据编码器,实现NRZ码转换为差分码,双相码和曼彻斯特码功能,串行数据速率为9600bit/s,扩展设计:超采样,频率1MHz实现数据实现960bit/s传输。要求通过仿真验证。 三.课程设计要求 1.要求独立完成设计任务。 2.课程设计说明书封面格式要求见《天津城市建设学院课程设计教学工作规范》附表1 3.课程设计的说明书要求简洁、通顺,计算正确,图纸表达内容完整、清楚、规范。 4.测试要求:根据题目的特点,采用相应的时序仿真或者在实验系统上观察结果。 5.课设说明书要求: 1)说明题目的设计原理和思路、采用方法及设计流程。 2)系统框图、VHDL语言设计清单或原理图。 3)对各子模块的功能以及各子模块之间的关系作较详细的描述。 4)详细说明调试方法和调试过程。 5)说明测试结果:仿真时序图和结果显示图。并对其进行说明和分析。 指导教师(签字): 教研室主任(签字): 批准日期: 2012年 12 月 22 日
目录 第一章通信解码器概述 (1) 1.1 几种码的介绍 (1) 1.1.1 NRZ码 (1) 1.1.2 差分码 (1) 1.1.3 曼彻斯特码(又称双相码) (1) 1.2 总体方案概述 (2) 1.3 用状态机设计差分码编码器 (2) 1.3.1 状态机简介 (2) 1.3.2 对编码器的设计 (3) 1.4 曼彻斯特码模块程序 (3) 第二章转码器的设计与仿真 (6) 2.1 功能描述 (6) 2.2 差分码源程序(基于Verilog HDL语言) (6) 2.3 功能模块的仿真 (7) 2.4 曼彻斯特码源程序(基于Verilog HDL) (8) 2.5 功能模块仿真 (10) 第三章转码器的综合及硬件验证 (11) 3.1 转码器码的综合 (11) 3.1.1 曼彻斯特码转码器 (11) 3.1.2 差分码转码器 (11) 3.2 图形文件 (11) 第四章转码器的设计总结 (12) 4.1 设计调试 (12) 4.2 设计心得 (12) 参考文献 (13)
带式输送机驱动装置设计概要
1 引言 1.1 国内外带式输送机的发展状况 输送机是在一定线路上连续输送物料的物料搬运机械,又称连续输送机。输送机可进行水平、倾斜和垂直输送,也可组成空间输送线路,输送线路一般是固定的。输送机输送能力大,运距长,还可在输送过程中同时完成若干工艺操作,所以应用广泛。 17世纪中,开始应用架空索道输送散状物料;19世纪中叶,各种现代结构的输送机相继出现。1868年,在英国出现了带式输送机;1887年,美国出现了螺旋输送机;1905年,瑞士出现了钢带式输送机;1906年,英国和德国出现了惯性输送机[1]。 20世纪80年代末以来,我国的煤矿用带式输送机也有了很大的发展,对其关键技术的研究和新产品的开发都取得了可喜的成果。输送机产品系列不断增多,从定型的SDJ、SSJ、STJ、DT等系列发展到多功能、适应特种用途的各种带式输送机系列,如国家“七五”攻关项目—“大倾角带式输送机成套设备”、“九五”攻关项目—“高产高效工作面顺槽可伸缩带式输送机”等都填补了国内空白,开发了大倾角、长距离输送原煤的新型带式输送机系列产品,并对带式输送机的关键技术及其主要元部件进行了理论研究和产品开发,应用动态分析技术和中间驱动与智能化控制等技术,研制成功了多种软启动和制动装置及以PLC为核心的可编程电控装置。但与国外相比(如表1-1),其机型一般都偏小,特别是带速通常均不超过4.5m/s,对高带速输送机及其动态设计与计算机监控等关键技术问题缺乏实践经验,由于带速普遍较低,许多设计单位仍沿用以往的静态设计法,用加大带式输送机安全系数的方法来提高设计的可靠性,其结果不仅增大了设备成本,而且降低了设备运行的可靠性。 表1-1 国外目前带式输送机的主要技术指标[2] 目前,带式输送机的发展趋势是:大运输能力、大带宽、大倾角、增加单长度和
通信系统建模与仿真课程设计
通信系统建模与仿真课程设计2011 级通信工程专业1113071 班级 题目基于SIMULINK的基带传输系统的仿真姓名学号 指导教师胡娟 2014年6月27日
1任务书 试建立一个基带传输模型,采用曼彻斯特码作为基带信号,发送滤波器为平方根升余弦滤波器,滚降系数为0.5,信道为加性高斯信道,接收滤波器与发送滤波器相匹配。发送数据率为1000bps,要求观察接收信号眼图,并设计接收机采样判决部分,对比发送数据与恢复数据波形,并统计误码率。另外,对发送信号和接收信号的功率谱进行估计。假设接收定时恢复是理想的。 2基带系统的理论分析 1.基带系统传输模型和工作原理 数字基带传输系统的基本组成框图如图1 所示,它通常由脉冲形成器、发送滤波器、信道、接收滤波器、抽样判决器与码元再生器组成。系统工作过程及各部分作用如下。 g T(t) n 定时信号 图 1 :数字基带传输系统方框图 发送滤波器进一步将输入的矩形脉冲序列变换成适合信道传输的波形g T(t)。这是因为矩形波含有丰富的高频成分,若直接送入信道传输,容易产生失真。 基带传输系统的信道通常采用电缆、架空明线等。信道既传送信号,同时又因存在噪声n(t)和频率特性不理想而对数字信号造成损害,使得接收端得到的波形g R(t)与发送的波形g T(t)具有较大差异。 接收滤波器是收端为了减小信道特性不理想和噪声对信号传输的影响而设置的。其主要作用是滤除带外噪声并对已接收的波形均衡,以便抽样判决器正确判决。 抽样判决器首先对接收滤波器输出的信号y(t)在规定的时刻(由定时脉冲cp控制)进行抽样,获得抽样信号{r n},然后对抽样值进行判决,以确定各码元是“1”码还是“0”码。 2.基带系统设计中的码间干扰和噪声干扰以及解决方案
8421码到余三循环码的转换电路仿真课设报告
东北大学秦皇岛分校计算机与通信工程院 电子线路课程设计 具有数显的数码转换电路(8421码—余3循环码)
课程设计任务书 专业:通信工程学号:4101015 学生姓名:吴玉新 设计题目:具有数显的码制转换电路8421码—余3循环码一、设计实验条件 高频实验室 二、设计任务及要求 1. 要求输入为8421码。输出为余三循环码 2. 输出要具有数显功能 三、设计报告的内容 1.前言 数字电路课程设计是继“数字电路”课后开出的实践环节课程其目的是训练学生综合运用学过的数字电路的基本知识独立设计比较复杂的数字电路能力。设计建立在硬件和软件两个平台的基础上。硬件平台是可编程逻辑器件所选器件可保存在一片芯片上设计出题目要求的数字电路。软件平台是multisim通过课程设计学生要掌握使用EDA电子设计自动化工具设计数字电路的方法包括设计输入便宜软件仿真下载及硬件仿真等全过程。数字电路课程设计在于更好的让学生掌握这门课程并且了解其实用性知道该门课程和我们的生活息息相关并且培养学生的动手能力让学生对该门课程产生浓厚的兴趣。 2.设计内容及其分析 (1)方案一 1.设计思路 设计8421转余三循环码主要是考虑怎样找到二者之间的联系。列出真值表后,根据值为1的那些项列出表达式,用最小项之和表示。然后根据卡诺图进行
化简,得出最简表达式。最后根据表达式,在Multisim上画图仿真,用灯的灭(表示0)和亮(表示1)来表示码制的转换。即可得到8421码对余三循环码的转换。 真值表: 表1 8421转余三循环码真值表 根据真值表得出表达式: X4=A——C X3=B——C——+ A——BCD+A——B——D—— X2=A B——C——D——+A——B+A——C+A——D X1=A B——C——+A——BD+A——BC 根据表达式画出逻辑电路图:
7,3循环码要点
****************** 实践教学 ******************* 兰州理工大学 计算机与通信学院 2014年秋季学期 计算机通信课程设计 题目:(7,3)循环码编译码软件设计 专业班级: 姓名: 学号: 指导教师: 成绩:
摘要 随着计算机通信的日益发展,传输数据的场合越来越多。串行数据的差错检验是保证数据传输正确的必要手段,而循环码是差错码中最常用的一种编码。 循环码是线性分组码中最重要的一种子类,它除了具有分组码的线性外,还具有循环性,其码字结构一般用符号(n,k)表示,其中,n是该码组中的码元数,k是信息码元位数,r=n-k是监督码元位数。循环码具有许多特殊的代数性质,这些性质有助于按照要求的纠错能力系统地构造这类码,能简化译码算法,并且目前发现的大部分线性码与循环码有密切关系。已有循环码编译码系统大多以标准逻辑器件(如中小规模TTL系列、CMOS系列)按传统数字系统设计方法设计而成,其主要缺点是逻辑规模小、功耗大、可靠性低。随着大规模、超大规模集成电路的发展,以及电子设计自动化水平的提高,这种制约正在被逐渐消除。 本文通过C 语言平台运行所编写的程序,观察了在输入信息码情况下输出对应的编码结果以及相反的译码功能。通过多组的对比验证了该(7,4)循环码的编译码程序的正确性。最后,在程序运行的过程中进步分析循环码的编译码原理,并通过比较仿真模型与理论计算的性能,证明了仿真模型的可行性。 关键词:循环码;编码;译码;程序仿真
目录 前言 (1) 1、目的及意义 (2) 2、设计原理 (3) 2.1循环码的介绍 (3) 2.1.1循环码的定义 (3) 2.1.2循环码的特点 (3) 2.1.3循环码的多项式表示 (4) 2.1.4(n,k)循环码的生成多项式 (4) 2.1.5循环码的生成矩阵和一致校验矩阵 (6) 2.2循环码编码原理 (8) 2.2.1多项式除法电路 (8) 2.3循环码译码原理 (9) 3、设计结果及分析 (11) 3.1程序运行结果 (11) 3.2运行结果理论分析 (14) 3.3软件可行性分析 (15) 4、总结 (16) 附录 (17) 参考文献 (22)
通信原理设计报告(7_4)汉明码的编解码设计
目录 前言...............................................................1第1章设计要求.................................................3第2章 QuartusⅡ软件介绍.......................................4第3章汉明码的构造原理........................................6 3.1 (7,4)汉明码的构造原理........................................6 3.2 监督矩阵H与生成矩阵G.........................................7 3.3 校正子(伴随式S)..............................................8第4章(7,4)汉明码编码器的设计............................10 4.1 (7,4)汉明码的编码原理及方法.................................10 4.2 (7,4)汉明码编码程序的设计...................................10 4.3 (7,4)汉明码编码程序的编译及仿真.............................11第5章(7,4)汉明码译码器的设计...........................12 5.1 (7,4)汉明码的译码方法......................................12 5.2 (7,4)汉明码译码程序的设计..................................13 5.3 (7,4)汉明码译码程序的编译及仿真............................15第6章(7,4)汉明码编译码器的设计........................17 6.1 (7,4)汉明码编译码器的设计..................................17参考文献.........................................................18体会与建议.......................................................19附录..............................................................20
混合驱动连杆机构设计策略的研究
机构运动控制器的设计主要内容是选择控制策略的和确定控制参数等。 通常将机构的结构设计、运动设计、动力设计合并,称为机构的机械方面的设计。由于机构的结构'鼓计目前还没有公认有效的设计计算方法,本文将不再将机构的结构设计列入考虑范围之内。 在设计中含有许多变量,有些设计变量是只对某些方面的性能有影响,而有些变量是对所有方面的性能都有影响。比如务个构件的质量和转动惯量对机构的运动设计没有影响.只对动力和控制设计产生影响;而各个构件的杆长不仅对机构的运动设计有影响,而且对机构的动力设计和控制设计有影响,因为在机构的动力学方程式中,杆长一般是不可消除的变量。 2.1逐一进行策路(SinglePassStrategy) 将设计过程分为运动设计、动力设计和控制设计,依次进行优化设计。进行下一阶段的设计时,将上一阶段所确定的变量统统作为已知的参数,而且不再进行改变。 这种设计策略的优点是可以充分利用现成的机构设计理论、方法和工具。所存在的问题是:即使设计在运动、动力和控制三个方面都分别是最优的解,也不能保证整个机构的]_=作性能是最好的,其原因是机构设计问题通常为非线性的,不符合线性系统的迭加原理;另外一方面,设计的最终结果取决于机构的运动设计,因为运动设计是整个过程中的第一步,后面的动力设计和控制设计都是在运动设计的结果上进行的。如果运动设计的结果好,则整个机构设计就会有好的结果,反之亦然。 2.2迭代策略(IterativeStrategy) 迭代策略实际上是在逐一进行策略的基础上增加了反馈重复的环节。这种策略比较强调在设计时确定机构的整体性能。在不损害控制器性能的条件下进行机构的运动和动力设计,然后,又在不损害机械性能的条件下进行控制器的设计,直到满足机构的整体性能要求为止。也可以预先设置迭代次数,l,当完成了,l迭代之后就结束设计过程。 迭代策略利用了逐一进行策略的优点,同时又在一定程度L克服r它的缺点。设计的结果无论是对于机构的运动、动力设计,还是控制设计都是最优的,而且无论设计的顺序是否相同,最后的设计结果都应当是相同的。 2.3系统解耦策略(DecoupledSystemStrategy) 首先将设计中所有的量分为设计变量和设计参数。设计变量是描述设计的量,当设计变量确定了之后,设计就完成了:而设计参数是在设计中保持不变的量。参数又分为简单参数和耦合参数,简单参数是指与其他方面设计无关的参数,而耦合参数是与其他方面的设计相关的参数。 在混合驱动连杆机构的设计中,l乜动机的转速、电动机的最小输入功率、伺服电动机的控制电压等是与机构的运动和动力设计相耦合的,而电动机转予的转动惯量、电动机的电动势常数、电动机电枢回路电阻等是与电动机控制设计相耦合的。 在系统解耦设计策略中,先给定一些耦合参数,并且按照多目标优化设计中加权系数的方法建立目标函数,然后进行系统的优化设计。显然,给定的耦合参数对于系统的设计结果至关重要,给定不同的耦合参数就可能得到不同的设计结果。 2.4一次完成策略(AHAtOnceStrategy) 与系统解耦设计类似,只是将耦合参数也作为设计变量。 2.5双层设计策略(BileverStrategy) 对予目标函数和耦合参数的处理方法与一次完成策略相同,只是将控制器的设计处理为一个子优化问题。这种策略是基于控制器结构的改变不会引起系统优化设计策略形式的变化而产生的,其主要优点在于可以直接应用现成的控制器优化设计的结果,而省去繁琐的数值迭代计算。 以上五种策略中逐一进行策略和迭代策略属于串行设计,而系统解耦策略、一次完成策略和双层设计策略属于并行设计。 3混合驱动五杆机构的串行和并行设计设计一个平面五杆机构,机构由一个转速为2xrad/s的匀速转动电动机和一个由计算机控制的伺服电动机驱动,要求在1秒钟内等时间间隔地实现12个连杆轨迹点。12个轨迹点的分布如图1所示。 图1设计要求实现的连杆轨迹点 分别采用串行和并行的设计策略对机构进行设计。图2、图3和图4分别是其中三种设计策略所得到的结果。 设计1为只进行运动设计、PD控制器设计,采用逐一进行策略;设计2为进行运动设计、动力设计和PD控制器设计,采用逐一进行策略;设计3为进行运动设计、动力设计 和PD控制器设计,采用一次完成策略。
小学科学教学中驱动性问题的设计策略
小学科学教学中驱动性问题的设计策略(群中讨论记录) ============================== ==================== ============================== ====================各位群友,大家好! 当前小学科学课堂教学改革中最引人注目的是科学课堂的有效教学问题,课堂教学的有效性是指通过课堂教学使学生获得发展,发展的内涵包括知识、技能,过程、方法与情感、态度、价值观三维目标的协调发展。科学课堂的有效教学包括教师“有效的教”与学生“有效的学”两个层面,科学教学应以科学兴趣为求知本能,
以科学方法为探究核心,以科学知识为概念核心,以科学精神为理念行为。有效的课堂应是学生思维活跃,学习积极愉快,课堂氛围愉悦,大部分学生有成功感,课的目标达成度高,学生的科学兴趣、科学方法、科学知识、科学精神及科学素养得到提升。 要实现科学课堂教学的有效性,必须既关注教师的教,又关注学生的学,在教师的教与学生的学中,“有效的学”远比“有效的教”意义重大,要想在以活动为主线的小学科学教学中实现学生“有效的学”,必须既关注教材的学问逻辑,又关注学生的思
维逻辑,以实现教材的学问逻辑与学生的思维逻辑相结合这一目的,驱动性问题在小学科学教学中解决的是学生为什么学的问题,是实现教材的学问逻辑与学生的思维逻辑相结合的有效途径和手段。 今天我们研讨的主题是“小学科学教学中驱动性问题的设计策略”,这是一个切口较小、操作性较强的问题。我为什么会提出研讨这一问题,原因是在平时的听课中,我们经常会发现教师精心设计探究问题,让学生带着问题去探索、发现,但却忽视了学生的心在需求,往往是一节课下来后,学生探究得很热闹,却不知为什么
1553B总线中曼彻斯特编解码器的设计
1553B总线中曼彻斯特编解码器的设计 时间:2011-04-11 来源:现代电子技术作者:武鹏,毕君懿 关键字:1553B总线曼彻斯特编解码器 0 引言曼彻斯特码是一种总线数据传输双极性码。在数字信号基带传输中,通过这种信道编码技术可使传送数据同时携带时钟信息,故也称其为自同步曼彻斯特码。在信道传输中曼彻斯特码有很好的抗干扰能力。接收端可以将分离出的时钟用于解码,从而简化了解码过程。 针对曼彻斯特码特点,可采用位同步方法提取时钟,常采用滤波法和数字锁相环法。滤波法采用的窄带滤波器不适合数字电路使用。数字锁相环法通过比较接收码元和本地码元为定时时钟的相位来添加扣除时钟脉冲,以达到调整相位的目的,但电路实现过于复杂。本文提出的时钟分离电路比数字锁相环简单,而且提取出来的时钟可以准确地采样到曼彻斯特码信号。 1 曼彻斯特码 曼彻斯特码是一种广泛用于以太网、短距离无线通信、航空电子综合系统中总线数据传输的双极性码。它的每个码元中点都存在一个电平跳变,1信号为一个从1到0的负跳变;0信号为一个从0到1的正跳变。由于曼彻斯特码在频谱中存在很强的定式分量,解码时可将分离出的时钟用来解码。另一方面,1553B传输电缆呈容性负载特性,所以在信号传输中,直流和低频分量将受到很大的衰减。曼彻斯特码频谱中不存在直流分量,而且低频分量也大大减小,很适合在1553B电缆中传输。 MIL-STD-1553B协议中采用的曼彻斯特码数据格式如图1所示。 同步头:占三位码元长度。命令字或状态字同步头的前1.5倍码元长度为高电平;后1.5倍码元长度为低电平,数据字同步头刚好相反。同步头用于区分字的类型以及标识字传输开始。 数据:16位数据位。图中bit3为数据最高位,依次递减,bit18为数据最低位。 奇偶校验位:这里采用奇校验。将16位数据按位同或的结果作为奇校验位。 2 曼彻斯特编码器的设计 由于曼彻斯特码的每个码元在其中心存在电平跳变,所以编码器的发送时钟频率至少应选择信息传输速率的2倍频。 通常编码器的实现方式有2种,基于移位寄存器,或者数据选择器。移位寄存器型编码器需要在编码开始后将同步头位、数据位、奇偶校验位通过字符格式编排器编排成一个并行数据,然后在发送时钟的控制下串行移位输出;数据选择器型编码器需要在编码开始后启动一个计数器,在计数器的控制下分别送出同步头、数据位、奇偶效验位。本文的编码器采用后者,其结构框图如图2所示。
数字通信系统的模型
数字通信系统的模型 ? 数字通信系统的分类 ?数字通信系统可进一步细分为数字频带传输通信系统、数字基带传输通信系统、模拟信号数字化传输通信系统。 1. 数字频带传输通信系统 数字通信的基本特征是,它的消息或信号具有“离散”或“数字”的特性,从而使数字通信具有许多特殊的问题。例如前边提到的第二种变换,在模拟通信中强调变换的线性特性,即强调已调参量与代表消息的基带信号之间的比例特性;而在数字通信中,则强调已调参量与代表消息的数字信号之间的一一对应关系。 另外,数字通信中还存在以下突出问题:第一,数字信号传输时,信道噪声或干扰所造成的差错,原则上是可以控制的。这是通过所谓的差错控制编码来实现的。于是,就需要在发送端增加一个编码器,而在接收端相应需要一个解码器。第二,当需要实现保密通信时,可对数字基带信号进行人为“扰乱”(加密),此时在收端就必须进行解密。第三,由于数字通信传输的是一个接一个按一定节拍传送的数字信号,因而接收端必须有一个与发端相同的节拍,否则,就会因收发步调不一致而造成混乱。另外,为了表述消息内容,基带信号都是按消息特征进行编组的,于是,在收发之间一组组的编码的规律也必须一致,否则接收时消息的真正内容将无法恢复。在数字通信中,称节拍一致为“位同步”或“码元同步”,而称编组一致为“群同步”或“帧同步”,故数字通信中还必须有“同步”这个重要问题。 综上所述,点对点的数字通信系统模型一般可用图1-3 所示。
需要说明的是,图中调制器/ 解调器、加密器/ 解密器、编码器/ 译码器等环节,在具体通信系统中是否全部采用,这要取决于具体设计条件和要求。但在一个系统中,如果发端有调制/ 加密/ 编码,则收端必须有解调/ 解密/ 译码。通常把有调制器/ 解调器的数字通信系统称为数字频带传输通信系统。 2. 数字基带传输通信系统 与频带传输系统相对应,我们把没有调制器/ 解调器的数字通信系统称为数字基带传输通信系统,如图1-4 所示。 图中基带信号形成器可能包括编码器、加密器以及波形变换等,接收滤波器亦可能包括译码器、解密器等。 3. 模拟信号数字化传输通信系统 上面论述的数字通信系统中,信源输出的信号均为数字基带信号,实际上,在日常生活中大部分信号(如语音信号)为连续变化的模拟信号。那么要实现模拟信号在数字系统中的传输,则必须在发端将模拟信号数字化,即进行A/D 转换;在接收端需进行相反的转换,即D/A 转换。实现模拟信号数字化传输的系统如图1-5 所示。
CRC课程设计报告
目录 序言 (2) 第一章通信系统课程设计要求要求和方案 (3) 1.1通信系统课程设计总体要求 (3) 1.2课程设计题目 (3) 1.3 CRC编解码器设计方案 (3) 第二章 QuartusⅡ简介 (5) 2.1 Quartus II简介 (5) 第三章 (24,16)CRC 循环码编解码器的设计 (7) 3.1 CRC循环校验码的基本原理 (7) 3.1.1 CRC校验码的生成 (7) 3.1.2 CRC校验码校验原理 (7) 3.1.3 CRC循环码纠错原理 (8) 3.2 (24,16)CRC循环码编解码器的实现 (9) 3.2.1 CRC-8 生成多项式 (9) 3.2.2 (24,16)CRC 循环码编码器的设计 (10) 3.2.3 (24,16)CRC 循环码解码器的设计 (11) 3.2.4 (24,16)CRC 循环冗余校验码编解码器总图 (14) 体会与建议 (16) 参考文献 (17) 附录 (18)
序言 通常,数据通信中的编码可以分为两大类,分别是信源编码和信道编码。在实际应用中,为了提高数据通信的可靠性而采取的编码称为信道编码,也称做抗干扰编码。一般来讲,数据通信要求传输过程中的误码率应该足够低,这样才能真正符合实际应用的具体要求,为了降低数据通信线路传输的误码率,通常有改善数据通信线路传输质量和差错检测控制两种方法。 实现差错检测控制的方法很多,循环冗余校验(CRC)就是一类重要的线性分组码。循环冗余码校验英文名称为Cyclical Redundancy Check,简称CRC。CRC校验码码的作用是:发送方发送的数据发送给了接收方,但是由于在传输过程中信号干扰,可能出现错误的码,造成的结果就是接收方不清楚收到的数据是否就是发送方要发的数据,所以就有了CRC校验码。保证了发送跟接受的数据是否一样,要纠错的话,还需对软件进行设计,毕竟传输的是2进制,如果知道了哪一位出错了,可以把那一位取反,需要对软件进行优化。CRC也是数据通信领域中最常用的一种差错校验码,其特征是信息字段和校验字段的长度可以任意选定。它是利用除法及余数的原理来作错误侦测的。实际应用时,发送装置计算出CRC值并随数据一同发送给接收装置,接收装置对收到的数据重新计算CRC并与收到的CRC相比较,若两个CRC值不同,则说明数据通讯出现错误。 本次课程设计主要设计(24,16)校验码的编码与解码,本次课程设计是介绍如何通过quartus软件,采用原理图输入法,分别完成相应的编码和解码;最后将编码和解码电路图结合,检查编码解码过程是否发生错误。通过课程设计验证CRC校验码的检错纠错功能。
通信编解码器
学号 EDA技术及应用A 课程设计说明书 通信编解码器 起止日期:2015 年12 月28 日至2015 年12 月31 日 学生姓名 班级 成绩 指导教师(签字) 计算机与信息工程学院电子信息与工程系 2015年12月31日
课程设计任务书 2014 —2015 学年第1 学期 电子与信息工程系电子信息科学与技术专业 课程设计名称:EDA技术及应用A 设计题目:通信编解码器 完成期限:自2015 年12月28 日至2015 年12 月31 日共 1 周 一.课程设计依据 在掌握常用数字电路原理和技术的基础上,利用EDA技术和硬件描述语言,EDA开发软件(Quartus Ⅱ)和硬件开发平台(达盛试验箱CycloneⅡFPGA)进行初步数字系统设计。 二.课程设计内容 采用状态机结构设计简易串行数据编码器,输入为NRZ码,实现把输入码转换为转换为差分码,双相码,曼彻斯特码功能,串行数据速率为9600bit/s,要求通过仿真验证。 扩展设计:数据9600bit/s从串口来,采用1MHz超采样,实现数据9600bit/s NRZ码恢复,然后进行码变换。 三.课程设计要求 1. 要求独立完成设计任务。 2. 课程设计说明书封面格式要求见《天津城建大学课程设计教学工作规范》附表1 3. 课程设计的说明书要求简洁、通顺,计算正确,图纸表达内容完整、清楚、规范。 4. 测试要求:根据题目的特点,采用相应的时序仿真或者在实验系统上观察结果。 5. 课设说明书要求: 1) 说明题目的设计原理和思路、采用方法及设计流程。 2) 对各子模块的功能以及各子模块之间的关系作明确的描述。 3) 对实验和调试过程,仿真结果和时序图进行说明和分析。 4) 包含系统框图、电路原理图、HDL设计程序、仿真测试图。 指导教师(签字): 教研室主任(签字): 批准日期:2015 年12 月24 日
重卡贯通式驱动桥结构设计
摘要 驱动桥作为汽车四大总成之一,它的性能的好坏直接影响整车性能,而对于载重汽车显得尤为重要。当采用大功率发动机输出大的转矩以满足目前载重汽车的快速、重载的高效率、高效益的需要时,必须要搭配一个高效、可靠的驱动桥。所以采用传动效率高的单级减速驱动桥已成为未来重载汽车的发展方向。本文参照传统驱动桥的设计方法进行了载重汽车驱动桥的设计。本文首先确定主要部件的结构型式和主要设计参数;然后参考类似驱动桥的结构,确定出总体设计方案;最后对主,从动锥齿轮,差速器圆锥行星齿轮,半轴齿轮,全浮式半轴和整体式桥壳的强度进行校核以及对支承轴承进行了寿命校核。本文不是采用传统的双曲面锥齿轮作为载重汽车的主减速器而是采用弧齿锥齿轮,希望这能作为一个课题继续研究下去。 关键字:载重汽车驱动桥单级减速桥弧齿锥齿轮
Abstract Drive axle is the one of automobile four important assemblies.It` performance directly influence on the entire automobile,especially for the heavy truck .Because using the big power engine with the big driving torque satisfied the need of high speed,heavy-loaded,high efficiency,high benefit today`heavy truck,must exploiting the high driven efficiency single reduction final drive axle is becoming the heavy truck`developing tendency. This design following the traditional designing method of the drive axle. First ,make up the main parts`structure and the key designing parameters; thus reference to the similar driving axle structure ,decide the entire designing project ; fanially check the strength of the axle drive bevel pinion ,bevel gear wheel ,the differentional planetary pinion,differential side gear ,full-floating axle shaft and the banjo axle housing ,and the life expection of carrier bearing . The designing take the spiral bevel gear for the tradional hypoid gear ,as the gear type of heavy truck`s final drive,with the expection of the question being discussed,further . Key words:heavy truck drive axle single reduction final drive the spiral bevel gear
各类液晶屏比较及驱动设计(DOC)
目录 第一章项目介绍 1.1项目功能 1.2项目特点 第二章各类液晶显示模块的比较 2.1 简介 2.2 硬件电路的比较 2.3 软件特性的比较 第三章实验箱硬件电路 3.1 单片机系统 3.2 数码管显示电路 3.3 液晶屏接口电路 3.4 流水灯显示电路及LED面板显示电路 第四章液晶显示参考程序 4.1 字符型LCD显示实验 4.2 图形型LCD显示实验 4.3 综合型LCD显示实验
第一章项目介绍 1.1项目功能 该实验箱是为《电子显示驱动》这门课程实验而设计的,该实验箱既可以做关于电子显示(LED数码管显示、LED面板显示、LCD显示等)的六个实验,也可以作为其它控制电路的平台。 六个实验分别为: 1、流水灯显示实验 2、数码管显示实验 3、LED面板显示实验 4、字符型LCD显示实验 5、图形型LCD显示实验 6、综合型LCD显示实验 具体参见电子显示驱动实验指导书 1.2项目特点 1、该实验箱为《电子显示驱动技术》课程提供了实验的载体,也为今后控制电路的扩展提 供了平台 2、CPU采用飞利浦最新技术芯片,性能非常可靠,稳定性好 3、将不同种类的LCD汇聚一起,通过实验的方法总结与分析,方便学生理解 4、为了使实验效果优化,本人将各种类型的LCD进行了比较研究,为后学者提供借鉴
第二章各类液晶显示模块的比较 2.1 简介 目前市场上有很多型号的液晶模块,可以将它们分成三类,一者字符型,二者图形型,三者综合型。 1、字符型 字符型液晶显示模块是一类专用于显示字母、数字、符号等的点阵型液晶显示模块,之所以称字符型液晶显示模块是因为其液晶器件的电极图形是由若干个5*8或5*11点阵块组成的字符块集。这是其一;其二是这类模块使用的是专用于字符显示控制与驱动的芯片。这两种因素确定了这类模块的范围仅局限于字符而现实不了图形,所以称其为字符型液晶显示模块。 2、图形型 图形型液晶显示模块是一类用于显示图形、汉字等的点阵型液晶显示模块,之所以称字符型液晶显示模块是因为其液晶器件的点阵像素与模块内的显示存储器的字节位一一对应,且这类模块的控制芯片是专为实现液晶屏上图像的上下滚动、左右移动而设计的。因此这类模块能非常方便地实现图形的静态或者动态显示,所以称其为图形液晶显示模块。 3、综合型 综合液晶显示模块除了具有字符液晶显示模块及图形液晶显示模块的特点(即既能显示字符又能显示图形)外,其最大的特点是具有独特的硬件初始值设置功能,显示驱动所需的参数如占空比系数,驱动传输的字节数及字符的字体选择等均由引脚电平设置。由于其集成了字符液晶显示模块及图形液晶显示模块的特点,所以其控制命令也比较多,不如单纯的字符液晶显示模块或图形液晶显示模块控制起来方便。 2.2 硬件电路的比较 由于三种液晶显示模块的显示功能不同,所以在硬件电路上有很大的区别。 1、字符发生器和光标闪烁控制电路 对于字符液晶显示模块,由于其主要功能是显示字符,所以在模块的硬件电路中有字符发生器和光标闪烁控制电路。 字符发生器是一种已经固化好的字模库,它含有很多5*7和5*10点阵字体的字符字模数据。字符液晶显示模块与综合液晶显示模块的字模库是不同的。图1和图2分别给出了字符液晶显示模块(以HD44780为例)与综合液晶显示模块(以T6963为例)的字模库。而
通信系统建模与仿真
《电子信息系统仿真》课程设计 级电子信息工程专业班级 题目FM调制解调系统设计与仿真 姓名学号 指导教师胡娟 二О一年月日
内容摘要 频率调制(FM)通常应用通信系统中。FM广泛应用于高保真音乐广播、电视伴音信号的传输、卫星通信和蜂窝电话系统等。 FM调制解调系统设计是对模拟通信系统主要原理和技术进行研究,理解FM系统调制解调的基本过程和相关知识,利用MATLAB集成环境下的M文件,编写程序来实现FM调制与解调过程,并分别绘制出基带信号,载波信号,已调信号的时域波形;再进一步分别绘制出对已调信号叠加噪声后信号,非相干解调后信号和解调基带信号的时域波形;最后绘出FM基带信号通过上述信道和调制和解调系统后的误码率与信噪比的关系,并通过与理论结果波形对比来分析该仿真调制与解调系统的正确性及噪声对信号解调的影响。在课程设计中,系统开发平台为Windows XP,使用工具软件为 7.0。在该平台运行程序完成了对FM调制和解调以及对叠加噪声后解调结果的观察。通过该课程设计,达到了实现FM信号通过噪声信道,调制和解调系统的仿真目的。了解FM调制解调系统的优点和缺点,对以后实际需要有很好的理论基础。 关键词 FM;解调;调制;M ATL AB仿真;抗噪性
一、M ATLAB软件简介 MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。其特点是: (1) 可扩展性:Matlab最重要的特点是易于扩展,它允许用户自行建立指定功能的M文件。对于一个从事特定领域的工程师来说,不仅可利用Matlab所提供的函数及基本工具箱函数,还可方便地构造出专用的函数。从而大大扩展了其应用范围。当前支持Matlab的商用Toolbox(工具箱)有数百种之多。而由个人开发的Toolbox则不可计数。 (2) 易学易用性:Matlab不需要用户有高深的数学知识和程序设计能力,不需要用户深刻了解算法及编程技巧。 (3) 高效性:Matlab语句功能十分强大,一条语句可完成十分复杂的任务。如fft语句可完成对指定数据的快速傅里叶变换,这相当于上百条C语言语句的功能。它大大加快了工程技术人员从事软件开发的效率。据MathWorks公司声称,Matlab软件中所包含的Matlab 源代码相当于70万行C代码。
循环码产生电路设计
循环码产生电路设计 1.引言 在线性分组码中,有一种重要的码称为循环码。循环码是线性分组码中最重要的一种子类,是目前研究的比较成熟的一类码。循环码具有许多特殊的代数性质,这些性质有助于按照要求的纠错能力系统地构造这类码,并且简化译码算法,并且目前发现的大部分线性码与循环码有密切关系。循环码还有易于实现的特点,很容易用带反馈的移位寄存器实现其硬件。循环码是在严密的代数学理论基础上建立起来的。这种编码和解码设备都不太复杂,而且纠错的能力较强。循环码除了具有线性码的一般性质外,还具有循环性。循环性是指任一码组循环一位以后,认为该码中的一个码组。 正是由于循环码具有码的代数结构清晰、性能较好、编译码简单和易于实现的特点,因此在目前的计算机纠错系统中所使用的线性分组码几乎都是循环码。它不但可以纠正独立的随机错误,也可用于检错突发错误并且非常有效。(n,k)循环码能够检测长为n-k 或更短的任何突发错误, 包括首尾相接突发错误。n-k+1位长的突发错误不能被检出所占的概率最大是错误!未找到引用源。,如果l>n-k+1,则不能检测长为l 的突发错误所占据的比值最大为)(2k n --。 2.设计要求 (1)用simulink 对系统建模。 (2)写出其生成多式。 (3)对所设计的系统性能进行仿真分析。 (4)对其应用举例阐述。 3.设计原理 3.1 循环码多项式 为了利用代数理论研究循环码,可以将码组用代数多项是来表示,这个多项式被称为码多项式,对于许用循环码A =(0121a a a a n n ?-- ),可以将它的码多项式表示为:
T(x)=012211a x a x a x a x a i i n n n n ++?++?++----对于二进制码组,多项式的每个系数不是0就是1,x 仅是码元位置的标志。因此,这里并不关心x 的取值。 3.2 循环码的生成多项式和生成矩阵 (全0码字除外)称为生成多项式,用g (x )表示。可以证明生成多项式g (x )具有以下特性: 1)g (x )是一个常数项为1的r=n-k 次多项式; 2)g (x )是1+n x 的一个因式; 3)该循环码中其它码多项式都是g (x )的倍式。 为了保证构成的生成矩阵G 的各行线性不相关,通常用g (x )来构造生成矩阵,这时,生成矩阵G 可以表示为: ?????? ?? ?????????????=--)()()()()(21x g x g x x g x x g x x G k k 其中011)(a x a x a x x g r r r ++++=- ,因此,一旦生成多项式g (x )确定以后,该循环码的生成矩阵就可以确定,进而该循环码的所有码字就可以确定。 3.3 循环码的编、译码方法 在编码时,首先需要根据给定循环码的参数确定生成多项式g (x ),也就是从1+n x 的因子中选一个(n-k )次多项式作为g (x );然后,利用循环码的编码特点,即所有循环码多项式A (x )都可以被g (x )整除,来定义生成多项式g (x )。 根据上述原理可以得到一个较简单的系统循环码编码方法:设要产生(n,k )循环码,m (x )表示信息多项式,则其次数必小于k ,而)(x m x k n ?-的次数必小于n ,用)(x m x k n ?-除以g (x ),可得余数r (x ),r (x )的次数必小于(n-k ),将r (x )加到信息位后作监督位,就得到了系统循环码。下面就将以上各步处理加以解释。 (1)用)(x m x k n ?-。这一运算实际上是把信息码后附加上(n-k )个“0”。例如,信息码为110,它相当于m (x )=2x +x 。当n-k =7-3=4时,)(x m x k n ?-=6x +5x ,它相当于1100000。
汽车液压制动驱动机构的设计
前言 (4) 1 汽车最小制动力的确定 (5) 2 前后制动器的制动力分配比例。 (6) 3 各轮缸输入力的确定 (8) 3.1前轮盘式制动器的输入力的确定 (9) 3.2后轮鼓式制动器轮缸输入力的计算 (9) 4. 制动轮缸直径d的确定 ................................. 错误!未定义书签。 d ............................. 错误!未定义书签。 4.1对于前轮轮缸直径 1 d的设计计算 .......................... 错误!未定义书签。 5. 制动主缸直径 6. 前轮轮缸主要结构参数的设计计算 ................ 错误!未定义书签。 6.1工作压力P ........................................... 错误!未定义书签。 6.2单位时间内油液通过缸筒有效截面体积的流量;错误!未定 义书签。 6.3缸筒的设计........................................... 错误!未定义书签。 6.3.1缸筒内径 .................................... 错误!未定义书签。 6.3.2 缸筒壁厚 .................................. 错误!未定义书签。 6.3.3 缸盖厚度的确定.......................... 错误!未定义书签。 6.3.4 工作行程的确定.......................... 错误!未定义书签。 6.3.5最小导向长度的确定.................... 错误!未定义书签。 6.3.6 活塞宽度的确定.......................... 错误!未定义书签。 6.3.7 缸体长度的确定.......................... 错误!未定义书签。 6.4 活塞的设计.......................................... 错误!未定义书签。 6.4.1 结构形式 .................................. 错误!未定义书签。 6.4.2 活塞与活塞杆的连接................... 错误!未定义书签。 6.4.3 活塞材料.................................... 错误!未定义书签。 6.5 密封圈............................................... 错误!未定义书签。 6.6 活塞杆............................................... 错误!未定义书签。 6.6.1 活塞杆要在导向套中滑动 .......... 错误!未定义书签。 6.6.2 活塞杆的计算 ............................. 错误!未定义书签。