飞机六自由度飞行动力学仿真实验
飞机六自由度飞行动力学仿真实验
一.实验目的
1.本实验将理论力学课程教学内容与航空航天工程应用相结合,分析、研究飞机受力与六自由度运动特性,培养学生分析问题和解决问题的能力,展现理论力学知识在航空航天工程中的应用。
2.通过本实验,使学生更好地学习和理解理论力学的有关内容,如飞机的受力分析、空间力系的简化与合成、刚体的平面运动与一般运动、刚体微分方程的建立与求解等,激发学生对理论力学的学习兴趣,开阔视野,增强工程概念。
二.实验仪器与设备
实验在PC 个人计算机、WINDOWS 98以上操作系统环境中进行。
三.实验原理
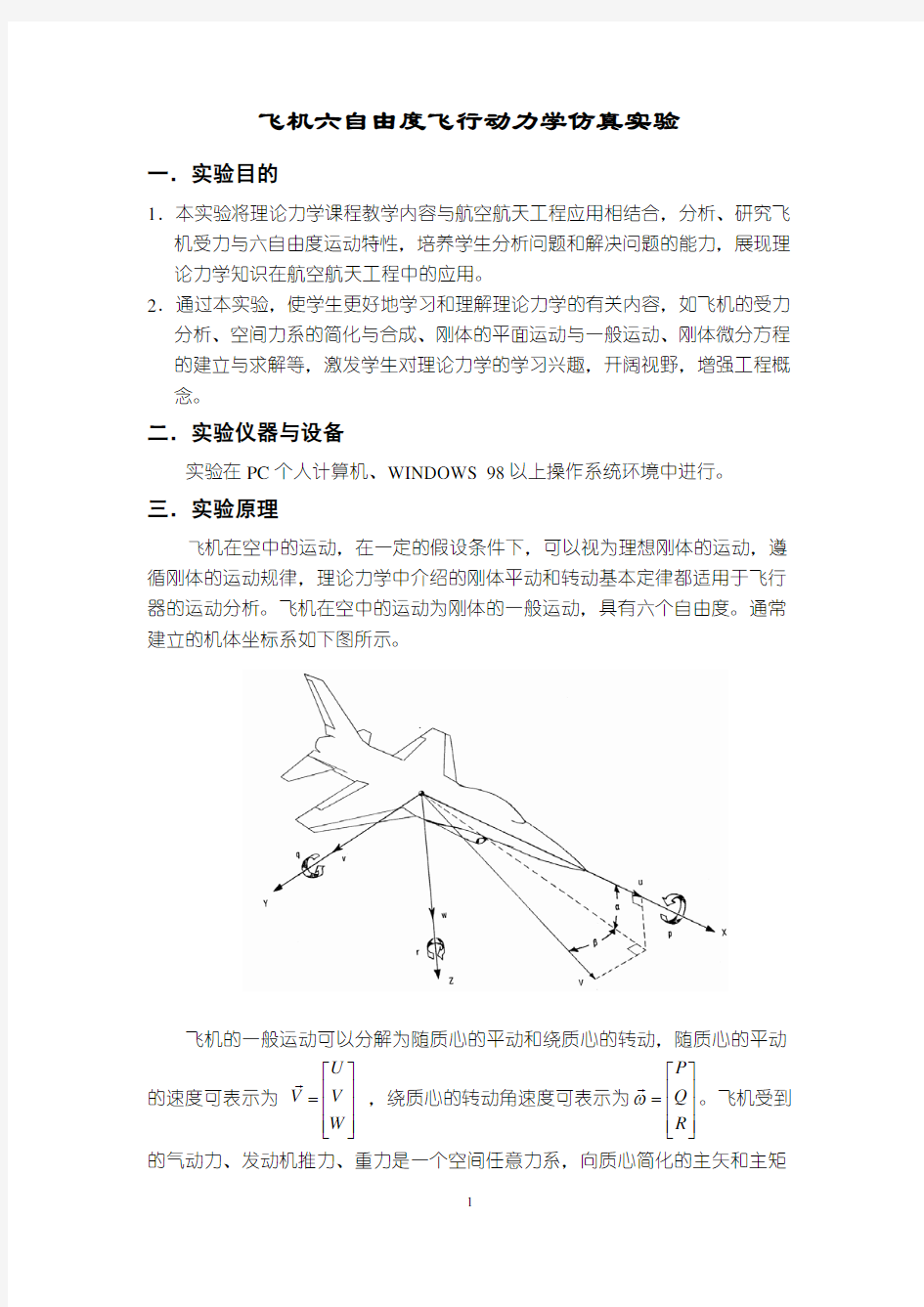
飞机在空中的运动,在一定的假设条件下,可以视为理想刚体的运动,遵循刚体的运动规律,理论力学中介绍的刚体平动和转动基本定律都适用于飞行器的运动分析。飞机在空中的运动为刚体的一般运动,具有六个自由度。通常建立的机体坐标系如下图所示。
飞机的一般运动可以分解为随质心的平动和绕质心的转动,随质心的平动
的速度可表示为 ??????????=W V U V G ,绕质心的转动角速度可表示为????
??????=R Q P ωG 。飞机受到
的气动力、发动机推力、重力是一个空间任意力系,向质心简化的主矢和主矩
分别为??????????=Fz Fy Fx F G 和????
??????=Mz My Mx M G 。根据质心运动定理(牛顿方程)和相对于质心的
动量矩定理可得飞机的动力学微分方程,一般说来,该方程没有解析解,只能通过数值积分得到数值解。
系统分为“概念演示”与“f16实时仿真”两大模块。在“概念演示”模块中着重介绍了飞机运动的自由度、单自由度下的操纵与响应特性。在“f16实时仿真”模块中介绍了飞机定直平飞、盘旋、拉起、起飞、着陆、失速尾旋等的飞行过程及受力情况,学生也可以亲自驾驶这架F16进行实时仿真飞行。
四.实验步骤
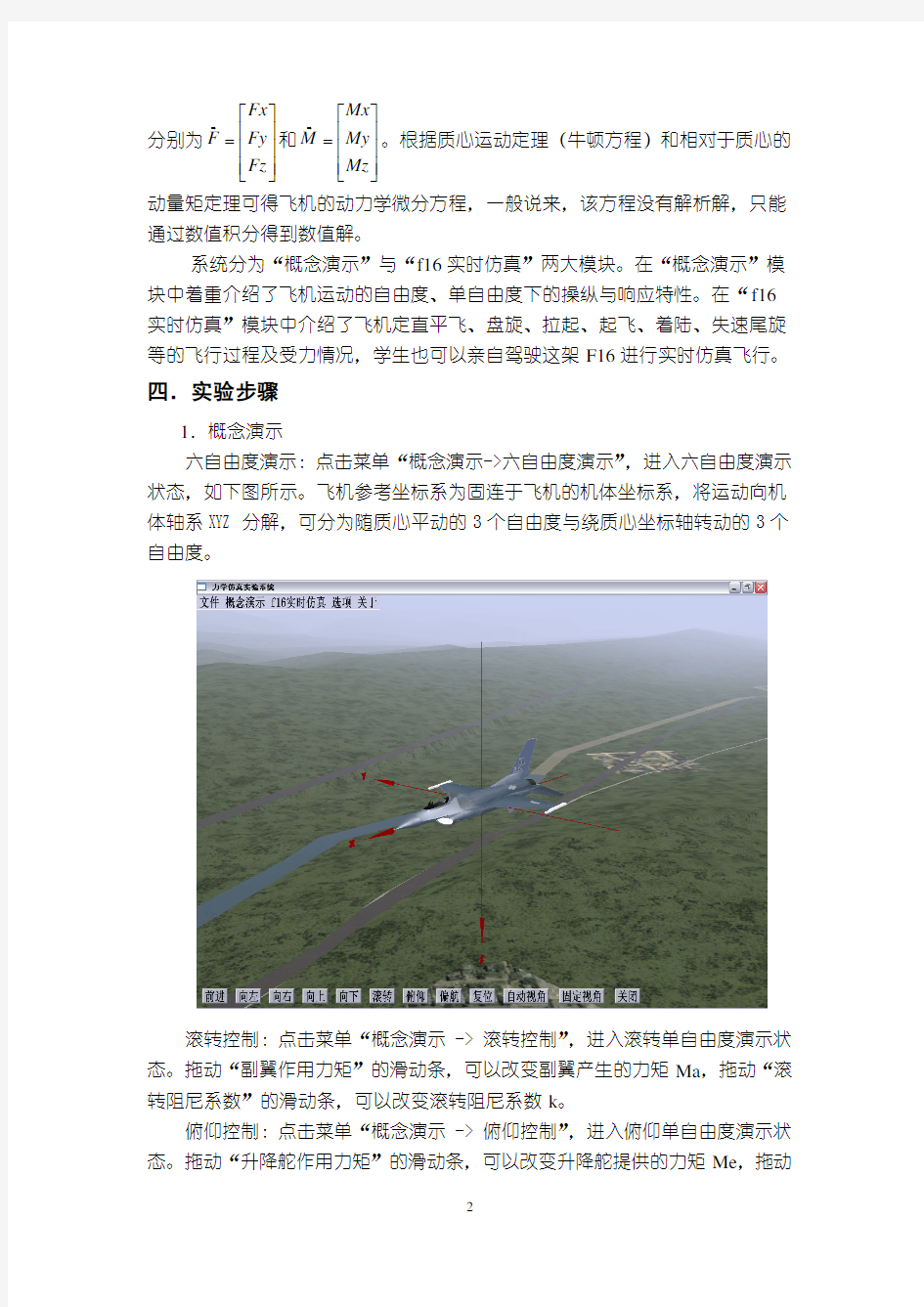
1.概念演示
六自由度演示:点击菜单“概念演示->六自由度演示”,进入六自由度演示状态,如下图所示。飞机参考坐标系为固连于飞机的机体坐标系,将运动向机体轴系XYZ 分解,可分为随质心平动的3个自由度与绕质心坐标轴转动的3个自由度。
滚转控制:点击菜单“概念演示 -> 滚转控制”,进入滚转单自由度演示状态。拖动“副翼作用力矩”的滑动条,可以改变副翼产生的力矩Ma ,拖动“滚转阻尼系数”的滑动条,可以改变滚转阻尼系数k 。
俯仰控制:点击菜单“概念演示 -> 俯仰控制”,进入俯仰单自由度演示状态。拖动“升降舵作用力矩”的滑动条,可以改变升降舵提供的力矩Me ,拖动
“俯仰阻尼系数”的滑动条,可以改变俯仰阻尼系数k。
偏航控制:点击菜单“概念演示 -> 偏航控制”,进入偏航单自由度演示状态。拖动“方向舵作用力矩”的滑动条,可以改变方向舵提供的力矩Mr,拖动“偏航阻尼系数“的滑动条,可以改变偏航阻尼系数k。
前进控制:点击菜单“概念演示 -> 前进控制”,进入向前飞行单自由度演示状态。拖动“发动机推力”的滑动条,可以改变发动机推力Ft,拖动“阻力系数”的滑动条,可以改变阻力系数k。
2.f16实时仿真
f16动态演示:点击菜单“f16实时仿真 -> f16动态演示”,进入仿真飞行演示界面如下:
点击下拉条箭头,选择一个播放文件,再点击“载入”按钮,即开始播放演示文件。播放文件包括以下运动科目:定直平飞、盘旋、垂直拉起、滚转、尾旋、起飞、着陆等。可以分析飞机在运动过程中的受力及状态变化情况。
f16模拟飞行:点击菜单“f16实时仿真-> f16模拟飞行”,进入实时仿真飞行状态,开始飞机处于定直平飞状态。学生可以用鼠标和键盘驾驶这架F16。五.实验要求
1.反复观察实验现象,总结规律,并应用理论力学的有关知识分析飞机在外力、外力矩作用下的运动规律;
六.问题讨论
1.飞机在飞行过程中受哪些力作用?这些力是如何控制的?它们是如何影响飞机运动的?
力学实验报告
力学实验报告 篇一:工程力学实验(全) 工程力学实验学生姓名:学号:专业班级:南昌大学工程力学实验中心目录实验一金属材料的拉伸及弹性模量测定试验实验二金属材料的压缩试验实验三复合材料拉伸实验实验四金属扭转破坏实验、剪切弹性模量测定实验五电阻应变片的粘贴技术及测试桥路变换实验实验六弯曲正应力电测实验实验七叠(组)合梁弯曲的应力分析实验实验八弯扭组合变形的主应力测定实验九偏心拉伸实验实验十偏心压缩实验实验十二金属轴件的高低周拉、扭疲劳演示实验实验十三冲击实验实验十四压杆稳定实验实验十五组合压杆的稳定性分析实验实验十六光弹性实验实验十七单转子动力学实验实验十八单自由度系统固有频率和阻尼比实验 1 2 6 9 12 16 19 23 32 37 41 45 47 49 53 59 62 65实验一金属材料的拉伸及弹性模量测定试验实验时间:设备编号:温度:湿度:一、实验目的二、实验设备和仪器三、实验数据及处理引伸仪标距l =mm 实验前 2低碳钢弹性模量测定 E? 实验后 ?F?l = (?l)?A 屈服载荷和强度极限载荷 3载荷―变形曲线(F―Δl曲线)及结果四、问题讨论(1)比较低碳钢与铸铁在拉伸时的力学性能;(2)试从不同的断口特征说明金属的两种基本破坏形式。 4篇二:工程力学实验报告工程力学实验报告自动化12级实验班 1-1 金属材料的拉伸实验一、试验目的 1.测定低碳钢(Q235 钢)的强度性能指标:上屈服强度ReH,下屈服强度ReL和抗拉强度Rm 。 2.测定低碳钢(Q235 钢)的塑性性能指标:断后伸长率A和断面收缩率Z。 3.测定铸铁的抗拉强度Rm。 4.观察、比较低碳钢(Q235 钢)和铸铁的拉伸过程及破坏现象,并比较其机械性能。 5.学习试验机的使用方法。二、设备和仪器 1.试验机(见附录)。 2.电子引伸计。 3.游标卡尺。三、试样 (a) (b) 图1-1 试样拉伸实验是材料力学性能实验中最基本的实验。为使实验结果可以相互比较,必须对试样、试验机及实验方法做出明确具体的规定。我国国标GB/T228-2002 “金属材料室温拉伸试验方法”中规定对金属拉伸试样通常采用圆形和板状两种试样,如图(1-1)所示。它们均由夹持、过渡和平行三部分组成。夹持部分应适合于试验机夹头的夹持。过渡部分的圆孤应与平行部分光滑地联接,以保证试样
飞机大战实验报告
飞机大战实验报告 专业:网络工程132班 学号:139074298 姓名:孙仁强 计算机科学与技术学院二零一六年十二月
一、软件运行所需要的软硬件环境 本系统是以Windows系统为操作平台,用Java编程语言来实现本系统所需功能的。本机器的配置如下: 处理器:CORE i7 主频:1.2Hz以上 内存:4G以上 硬盘:HHD 50G 编程语言:Java 开发环境:windows7 开发软件:Eclipse Mars 二、游戏流程 1.用户打开游戏,进入开始菜单。 2.用户点击开始游戏按钮,进入游戏界面; 3.用户通过触屏方式控制玩家飞机上下左右移动,躲避与子弹相撞; 4.游戏失败后,显示本次游戏得分,用的秒数和水平; 5.退出游戏 三、主要代码 1、准备代码设置窗口使用双缓冲使飞机不闪烁 Constant设置窗口大小 package com.ahut.准备代码; publicclass Constant { publicstaticfinalint GAME_WIDTH = 350; publicstaticfinalint GAME_HEIGHT = 600; } package com.ahut.准备代码; import java.awt.Image; import java.awt.image.BufferedImage;
import java.io.IOException; import https://www.360docs.net/doc/9b3695210.html,.URL; public class GameUtil { private GameUtil () {} public static Image getImage(String path) { BufferedImage bi = null; try { URL u = GameUtil.class.getClassLoader().getResource(path); bi = javax.imageio.ImageIO.read(u); } catch (IOException e) { // TODO Auto-generated catch block e.printStackTrace(); } return bi; } } package com.ahut.准备代码; import java.awt.Frame; import java.awt.Graphics; import java.awt.Image; import java.awt.event.WindowAdapter; import java.awt.event.WindowEvent; public class MyFrame extends Frame{ public void lauchFrame() { setSize(Constant.GAME_WIDTH, Constant.GAME_HEIGHT); setLocation(100, 100); setVisible(true); new PaintThread().start(); addWindowListener(new WindowAdapter() { @Override public void windowClosing(WindowEvent e) { System.exit(0); } }); }
模电仿真实验 共射极单管放大器
仿真实验报告册 仿真实验课程名称:模拟电子技术实验仿真仿真实验项目名称:共射极单管放大器 仿真类型(填■):(基础■、综合□、设计□) 院系:专业班级: 姓名:学号: 指导老师:完成时间: 成绩:
一、实验目的 (1)掌握放大器静态工作点的调试方法,熟悉静态工作点对放大器性能的影响。 (2)掌握放大器电压放大倍数、输入电阻、输出电阻及最大不失真输出电压的测试方法。 (3)熟悉低频电子线路实验设备,进一步掌握常用电子仪器的使用方法。 二、实验设备及材料 函数信号发生器、双踪示波器、交流毫伏表、万用表、直流稳压电源、实验电路板。 三、实验原理 电阻分压式共射极单管放大器电路如图所示。它的偏置电路采用(R W +R 1)和R 2组成的分压电路,发射极接有电阻R 4(R E ),稳定放大器的静态工作点。在放大器的输入端加入输入微小的正弦信号U i ,经过放大在输出端即有与U i 相位相反,幅值被放大了的输出信号U o ,从而实现了电压放大。 在图电路中,当流过偏置电阻R 1和R 2的电流远大于晶体管T 的基极电流I B 时(一般5~10倍),则它的静态工作点可用下式进行估算(其中U CC 为电源电压): CC 21W 2 BQ ≈ U R R R R U ++ (3-2-1) C 4 BE B EQ ≈I R U U I -= (3-2-2) )(43C CC CEQ R R I U U +=- (3-2-3) 电压放大倍数 be L 3u ||=r R R β A - (3-2-4) 输入电阻 be 21W i ||||)(r R R R R += (3-2-5) 图 共射极单管放大器
六自由度运动模拟器
基于模型的阻抗控制六自由度电液斯图尔平台 摘要—本文详细描述了一个以模型为基础的阻抗控制六自由度电液斯图尔平台,刚体和电液伺服阀模型,包括所用伺服阀模型和一套完整的系统方程,也包括摩擦和泄漏液压原件。所设计的控制器是采用系统动力学和液压模型产生伺服阀电流。控制规则包括反馈和前馈两个单独的部分。根据指定的特性阻抗过滤器会修改所需的轨迹,修改后的轨迹被送入系统模型,以减少非线性液压动力的影响。提出了模拟的典型期望轨迹,并得到了拥有良好性能的控制器。 1.导言 最早的6自由度(DOF)斯图尔特高夫平台是在1954年发明的。在1965年,样机的平行机构被用做一个具有六自由度运动平台的飞行模拟器。此后,许多关于这种机构以及相关研究被发表,该机构可以是电动也可以是液动。许多研究人员已经研究了斯图尔特平台的动力学和运动学。然而驱动力却没有被考虑完全。虽然电动斯图尔平台已被广泛运用,但是很少有研究是关于包括驱动和控制的完整动力学。 阻抗控制被认为是一种积极的兼容的运动控制,主要需要行业应用并于周围环境相互作用,例如数控机床,铣床等。这种控制器同时具有安全性和灵活性,相对而言是首选。 液压科学与控制相结合,得到了新的液压系统的应用。这也是为什么液压系统会被作为一些工业和移动式应用机电驱动的首选。包括它们大批量快速生产的能力,它们的耐久性和刚度,还有他们的响应速度,液压体系不同于机电体系,在液压体系中力或例句输出与执行器的电流是不成真比的,因此,液压执行器不能作为力矩的来源模仿,但是可以作为受控阻抗,所以,要设计出了控制机器人的控制器。驱动力/力矩的虚拟设置在这里始终不可行。 控制技术被用来补偿电动液压伺服系统的非线性。研究人员已经提出了关于液压伺服系统的非线性自适应控制技术的假设、反推以及方式。一个强力的控制器是在非线性定量反馈理论的基础上设计的,已被工业液力执行机构所实现,同时考虑了系统和环境的不确定性。一个电动机械手控制的统一方式适用于任何提案。运动学约束议案,以及机机械臂及其环境之间的动态交互研究已经通过审查。制定所需的机械臂阻抗技术和对一个给定应用程序选择适当的阻抗的技术的最优化理论已经被提出。这里有两种控制机电驱动高夫斯图尔特并行平台机械阻抗的空间几何方法,第一种基于球形位置函数,第二种则是利用指数映射关联有限位移与扭转位移平衡的平台。 一个基于模型的高性能的压接头液压伺服系统前馈反馈阻抗控制器已经被提出,在这里,一个阻抗根据在自由空间或空间接触的行为来调整过滤器所需的轨迹,类似已提交的工作,其中基于位置阻抗控制器工业液压机械手已开发。此外,阻抗控制器研究已在遥控轮式液压伺服系统和重型工程中实施。 在这篇论文中,提及了一种基于模型的六自由度电液伺服斯图尔特关节对称平台阻抗控制器,用于描述刚体斯图尔特平台和液压驱动系统,对比其它方法,这里有伺服模型和摩擦模型。先进的控制方案在分析方案时,应用了刚体、驱动力学和伺服阀的输入电流矢量。控制规律包括两个信号,反馈信号和前馈信号。根据指定的行为阻抗过滤器会修改所需的轨迹。修改后的轨迹被送入系统模型,以减少非线性液压动力的影响。现金控制器的性能说明使用了典型的轨迹。拟议的方法可以扩展到串行或闭链机器人和模拟器。 2系统建模 在本节中,研究了六自由度电液伺服斯图尔特平台的动态模型,这是一个由支架和六个线性驱动器组成的闭环运动体系,该体系的原理如图1所示:
六自由度测试系统
第19卷第4期仪 器 仪 表 学 报V o l.19 №4 1998年8月CH I N ESE JOU RNAL O F SC IEN T IF I C I N STRUM EN T A ug. 1998 六自由度测试系统3 孙长库 周富强 刘 越 叶声华 (天津大学精密测试技术与仪器国家重点实验室 天津 300072) 摘要 本文所描述的测试系统基于激光全息分光技术和激光干涉测长技术,同时测定目标物体六个自由度的偏差。采用激光漂移补偿技术建立了稳定的激光束基准,采用磁光调制技术减小 光强不稳定等因素对滚转角测量精度的影响,实现了多自由度较高精度的准直。实验表明,在激光 光源距靶标1m时,该系统Ρ重复性误差:线位移小于4Λm,角位移小于4″,整个系统结构简单,测 量效率高。 关键词 六自由度误差 全息透镜 磁光调制 干涉测长 1 引 言 目前,在国内外相继研制的多自由度测量系统中,大都采用多激光束进行,在光路中加多个分光元件,将单一激光束分为多束作为测量基准,利用每一束光所带的位移信息,采用和一般准直仪相同的测试原理,来测量出各自由度的偏差〔1,2〕。这种简单的分光方法所分出的光束独立性不好,作为测量基准时,其相对位置精度难以保证,而且多元件的采用使得测试系统的可动部分不易小型化。近年来出现的双目视觉法六自由度测量系统〔3〕,虽然结构简单,但标定复杂,测量精度难以保证。 本文描述一种利用全息透镜分光和干涉计量的方法,结合激光漂移补偿技术和磁光调制技术同时探测空间物体六自由度偏差,并能保证各被测参数之间的相对独立,实现对空间物体位置精度的动态检测。 2 基本测试原理 测试系统结构示意如图1所示,坐标原点确定为全息透镜的中心O。一准直扩束光束经分光镜分为两束,一束进入干涉系统,被用来测量物体沿Z轴位移。另一束经磁光调制器后入射到全息透镜,被分为三路:非衍射光束2、会聚光束3和发射光束4,利用这三束光所携带的信息来测量其它五个自由度偏差。 当准直光束中心线以方向角Α、Β、Χ入射到全息透镜的中心时,在菲涅尔近似条件下(Α≈Β3 本文于1996年10月收到。
MFC_陨石撞飞机实验报告
.. . .. . 一、题目 陨石撞飞机综合性实验 二、中文摘要 用MFC设计一个陨石撞飞机的平面游戏:陨石不断地向下落,飞机通过上下左右键移动以躲避陨石。当陨石碰撞了飞机时,显示提示对话框,及飞机爆炸图像。确定后在碰撞位置重新开始游戏。三次碰撞后显示提示对话框,游戏结束。 三、关键词 MFC、Bitmap、timer、键盘响应(WM_KEYDOWN) 四、前言 此程序大多代码出自参考资料,一小部分代码为搜索资料并加工完成,其功能尚有不完善之处。 五、软件开发过程 (一)、新建MFC APPWizard[exe]单文档工程文件 在Visual C++中新建一个工程,命名为Plane。工程类型为:MFC AppWizard[exe]。在MFC AppWizard-Step1对话框中设置应用程序的类型,建立一个单文档工程文件,得到一个应用程序框架文件。 (二)、添加资源:、飞机位图、陨石位图、爆炸位图。 在[插入]-[资源…]选择Bitmap选项,单击[新建]即可。绘出一个飞机,ID 为(IDB_BITMAP1)、五个陨石(IDB_BITMAP2~IDB_BITMAP6)和一个炸弹位..
专业软件工程年级、班级09级8班 课程名称计算机综合性实验实验项目陨石撞飞机 实验时间2010 年 6 月20 日 实验指导老师黄荔实验评分 图(IDB_BITMAP7),如下图。 飞机位图陨石位图爆炸位图 (三)、在planeView.h头文件中声明所需变量和函数CBitmap m_plane; //声明一个CBitmap类型的飞机变量m_plane int mx,my;//表示飞机坐标 CBitmap m_bump; //爆炸位图变量 int mpx,mpy;//表示爆炸位图的坐标 int t; //爆炸次数 //声明陨石位图的成员变量为CBitmap类型的变量 CBitmap m_stone1,m_stone2,m_stone3,m_stone4,m_stone5; //声明陨石的坐标变量为int类型: int nstone1x,nstone1y; int nstone2x,nstone2y; int nstone3x,nstone3y;
模电仿真实验报告。
模拟电路仿真实验报告 张斌杰生物医学工程141班 MUltiSim软件使用 一、实验目的 1、掌握MUltiSim软件的基本操作和分析方法。 二、实验内容 1、场效应管放大电路设计与仿真 2、仪器放大器设计与仿真 3、逻辑电平信号检测电路设计与仿真 4、三极管Beta值分选电路设计与仿真 5、宽带放大电路设计与仿真 三、MUItiSim软件介绍 MUItiSim是美国国家仪器(NI)有限公司推出的以WindOWS为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。工程师们可以使用MUItiSinl交互式地搭建电路原理图,并对电路进行仿真。MUltiSiIn提炼了SPICE 仿真的复杂内容,这样工程师无需懂得深入的SPlCE技术就可以很快地进行捕获、仿真和分析新的设计,这也使其更适合电子学教育。通过MUItiSiIn和,PCB设计工程师和电子学教育工作者可以完成从理论到原理图捕获与仿真再到和测试这样一个完整的综合设计流程。 实验名称:
仪器放大器设计与仿真 二、实验目的 1、 掌握仪器放大器的设计方法 2、 理解仪器放大器对共模信号的抑制能力 3、 熟悉仪器放大器的调试功能 4、 掌握虚拟仪器库中关于测试模拟电路仪器的使用方法,如示波器,毫伏 表信 号发生器等虚拟仪器的使用 三、设计实验电路图: 四、测量实验结果: 出为差模放大为399mvo 五、实验心得: 应用MUIti S im 首先要准备好器件的PSPiCe 模型,这是最重要的,没有这个 东西免谈,当然SPiCe 高手除外。下面就可以利用MUItiSinl 的元件向导功 能制作 差模分别输入信号InW 第二条线与第三条线: 共模输入2mv 的的电压,输出为2mv 的电压。 第一条线输
六自由度
物体在空间具有六个自由度,即沿X、Y、Z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。因此,要完全确定物体的位置,就必须清楚这六个自由度。 六自由度运动平台是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。 空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用 L(i), (i=1、2、3、4、5、6)表示。整个运动模型如下: L(i)=TT(α,β,γ,X,Y,Z) 其中,TT是一个空间转换矩阵模型。由此实时算出每一运动时刻液压油缸的行程。液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。 多自由度运动控制 多自由度控制系统中,自由度最多为六自由度,并且六自由度运动控制难度最大,设备及系统最复杂,下面主要介绍我公司设计、生产的六自由度运动台。 六自由度运动平台是由六支直线伺服电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只伺服电动缸)执行器)的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出
六自由度摇摆平台
大黄蜂机器人六自由度摇摆台 大黄蜂机器人有限公司的六自由度平台系统由采用Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。六自由度运动平台(如下图)的下平台安装在地面上,上 平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下: 本设备主要由以下部分组成:运动上平台、下平台(基座)、电动缸及伺服 电机、驱动器系统、综合控制及监测系统。 各自功能如下: 上平台:是有效载荷的安装基面,提供六自由度的摇摆运动。 下平台:是六自由度摇摆台的安装基面,需要承受足够大的冲击力。 电动缸及伺服电机:通过控制电动缸活塞杆的行程,实现运动平台台体的六自由度运动,共6套。 驱动器系统:接收用户控制指令,通过控制伺服电机的输入,对伺服电机的输出转速和转角进行控制,达到控制电动缸活塞杆出速度和行程的目的,共6套。 综合控制监测系统:硬件为用户计算机,软件为研制方配合开发;同时,它 还对平台的运动过程进行监测,预防和处理系统的异常情况。
平台总体运动能力指标如上表,具体表述如下: a.平台定位精度及重复定位精度为0.5mm及0.1mm; b.平台转动精度及重复转动精度为0.1°及0.05°; c.行程回差小于0.2mm; d.平台X方向运动速度可从0mm/s到250mm/s连续变化;YZ方向运动 速度可从0mm/s到250mm/s连续变化; e.单支杆可承受轴向力不小于700N; f.单支杆的运动速度可从0m/s到250mm/s连续变化; g.平台中位位置固有频率:不小于40Hz; h.机械组件需具有开放性,可拆卸组装; i.机械设计安全系数不小于 2.0,驱动裕度不小于 3.0; j.额定载荷下,全行程往复工作寿命不小于1×104次,存储寿命不小于48月;
QTP测试实验报告-飞机票订票系统
QTP自动化功能测试实践 一、实验目的 1、熟悉QTP自动化功能测试流程 2、能够利用QTP进行B/S或者C/S架构程序的自动化功能测试 二、实验内容 功能测试是针对应用系统进行测试,是基于产品功能说明书,是在已知产品所应具有的功能,从用户角度来进行功能验证,以确认每个功能是否都能正常使用。本项目主要使用QuickTest对其自带的MercuryTours网站/飞机票订票系统进行功能测试,要求录制预订机票的完整过程,然后执行测试脚本并分析结果。 三、实验要求 1、独立完成; 2、提交测试脚本 3、提交测试用例说明书及缺陷报告。 四实验内容 1脚本的录制与回放测试及检查点的设置验证 脚本代码: Dialog("Login").WinEdit("Agent Name:").Check CheckPoint("Agent Name:") '验证乘客名字文本框中的值标准检查点 Dialog("Login").WinEdit("Agent Name:").Set "123456" '输入用户名 Dialog("Login").WinEdit("Password:").Set "mercury" '输入密码 Dialog("Login").WinButton("OK").Click '单击OK按钮登陆 Window("Flight Reservation").Static("Static").Check CheckPoint("Static") '检查页面中的图片元素是否加载 Window("Flight Reservation").ActiveX("MaskEdBox").Type "011218" Window("Flight Reservation").WinComboBox("Fly From:").Select "London" Window("Flight Reservation").WinComboBox("Fly To:").Select "Paris" Window("Flight Reservation").WinButton("FLIGHT").Click Window("Flight Reservation").Dialog("Flights Table").WinList("From").Select "12534 LON 08:00 AM PAR 10:00 AM AF $165.50" Window("Flight Reservation").Dialog("Flights Table").WinButton("OK").Click Window("Flight Reservation").WinEdit("Name:").Set "gcc" Window("Flight Reservation").WinEdit("Tickets:").SetSelection 0,1
北航飞行力学实验班飞机典型模态特性仿真实验报告(精)
航空科学与工程学院 《飞行力学实验班》课程实验飞机典型模态特性仿真 实验报告 学生姓名:姜南 学号:11051136 专业方向:飞行器设计与工程 指导教师:王维军 (2014年 6 月29日 一、实验目的 飞机运动模态是比较抽象的概念, 是课程教学中的重点和难点。本实验针对这一问题,采用计算机动态仿真和在人-机飞行仿真实验平台上的驾驶员在环仿真实验,让学生身临其境地体会飞机响应与模态特性的关系,加深对飞机运动模态特性的理解。 二、实验内容 1.纵向摸态特性实验 计算某机在某状态下的短周期运动、长周期运动的模态参数;进行时域的非实时或实时仿真实验,操纵升降舵激发长、短周期运动模态,并由结果曲线分析比较模态参数;放宽飞机静稳定性,观察典型操纵响应曲线,并通过驾驶员在环实时仿真体验飞机的模态特性变化。
2.横航向模态特性实验 计算某机在某状态下的滚转、荷兰滚、螺旋模态参数;进行时域仿真计算,操纵副翼或方向舵,激发滚转、荷兰滚等运动模态,并由结果曲线分析比较模态参数。 三、各典型模态理论计算方法及模态参数结果表 1 纵向模态纵向小扰动运动方程 0000 1 00 0e p e p e p u w e u w q p u w q X X u u X X g Z Z w w Z Z Z q q M M M M M δδδδδ δδδθθ????????-???? ????????? ? ???????????=+??????????????????? ?????????????????? A =[ X
u X ?w Z u Z w 0?g Z q 0M ?u M ?w0 M q 010] =[?0.01999980.0159027?0.0426897?0.04034850?32.2869.6279 0?0.00005547?0.001893500?0.54005010] A 的特征值方程 |λ+0.0199998?0.01590270.0426897 λ+0.0403485032.2 ?869.627900.000055470.001893500λ+0.540050 ?1λ |=0 特征根λ1,2=?0.290657205979137±1.25842158268078i λ3,4=?0.00954194402086311±0.0377636398212079i 半衰期t 1/2由公式t 1/2=? ln2λ 求得,分别为 t 1/2,1=2.38475828674173s t 1/2,3=72.6421344585972s 振荡频率ω分别为 ω1=1.25842158268078rad/s ω3=0.0377636398212079rad/s 周期T 由公式T =
并联六自由度运动平台
并联六自由度运动平台 1.概述 并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。 图0-1:六自由度及其坐标系定义图 我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。 六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。 2.系统组成 2.1液压伺服类 典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。 液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。 控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。 控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。 2.2 电动伺服类 电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增 加运动控制单元。具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。 3.主要技术参数 以下参数为液压类平台典型值,具体可按用户要求设计制造。 3.1平台主要参数 平台最大负载:静态≥2000KG,动态≥3000KG。 上平台球铰分布园直径1400mm,相邻球心距离157mm; 下平台球铰分布园直径1600mm,相邻球心距离167mm; 伺服缸最小球铰球心距离800mm,最大长度1200mm;(采用Φ63/45~400缸体)。 平台初始高度约700mm。 3.2 泵站技术指标 额定流量:90L/min 最大系统压力:12Mpa; 泵站电机功率:22KW; 空间尺寸:1400×1200×1320 3.3 运动参数 伺服缸运动速度≥200mm/S;有效行程≥400mm。 主要运动参数如下表:
六轴工业机器人实验报告
六轴工业机器人模块 实验报告 姓名:张兆伟 班级:13 班 学号:30 日期:2016年8月25日
六轴工业机器人模块实验报告 一、实验背景 六自由度工业机器人具有高度的灵活性和通用性,用途十分广泛。本实验是在开放的六自由度机器人系统上,采用嵌入式多轴运动控制器作为控制系统平台,实现机器人的运动控制。通过示教程序完成机器人的系统标定。学习采用C++编程设计语言编写机器人的基本控制程序,学习实现六自由度机器人的运动控制的基本方法。了解六自由度机器人在机械制造自动化系统中的应用。 在当今高度竞争的全球市场,工业实体必须快速增长才能满足其市场需求。这意味着,制造企业所承受的压力日益增大,既要应付低成本国家的对手,还要面临发达国家的劲敌,二后者为增强竞争力,往往不惜重金改良制造技术,扩大生产能力。 机器人是开源节流的得利助手,能有效降低单位制造成本。只要给定输入成值,机器人就可确保生产工艺和产品质量的恒定一致,显著提高产量。自动化将人类从枯燥繁重的重复性劳动中解放出来,让人类的聪明才智和应变能力得以释放,从而生产更大的经济回报。 二、实验过程 1、程序点0——开始位置 把机器人移动到完全离开周边物体的位置,输入程序点 0。按下手持操作示教器上的【命令一览】键,这时在右侧弹出指令列表菜单如图:按手持操作示教器【下移】键,使{移动 1}变蓝后,按【右移】键,打开{移动 1}子列表,MOVJ 变蓝后,按下【选择】键,指令出现在命令编辑区。修改指令参数为需要的参数,设置速度,使用默认位置点 ID 为 1。(P1 必须提前示教好)。按下手持操作示教器上的【插入】键,这时插入绿色灯亮起。然后再按下【确认】键,指令插入程序文件记录列表中。此时列表内容显示为: MOVJ P=1 V=25 BL=0 (工作原点) 2、程序点1——抓取位置附近(抓取前) 位置点1必须选取机器人接近工件时不与工件发生干涉的方向、位置。(通常在抓取位置的正上方)按下手持操作示教器上的【命令一览】键按手持操作示教器【下移】键,使{移动 1}变蓝后,按【右移】键,打开{移动 1}子列表,MOVJ
单自由度实验报告
[键入公司名称] 单自由度振动系统固有频率及阻尼的测定实验 报告 班级:结02 实验人:陈伟 同组人:陈光赵煜民 2011/10/31 理论力学实验报告
一、实验目的 1. 掌握测定单自由度系统固有频率、阻尼比的几种常用方法; 2. 掌握常用振动仪器的正确使用方法。 二、实验内容 1. 记录水平振动台的自由衰减振动波形; 2. 测定水平振动台在简谐激励下的幅频特性; 3. 测定水平振动台在简谐激励下的相频特性; 4. 根据上面测得的数据,计算出水平振动台的固有频率、阻尼比。 三、实验原理 具有粘滞阻尼的单自由度振动系统,自由振动微分方程的标准形式为 022=++q p q n q ,式中q 为广义坐标,n 为阻尼系数,eq eq m C n /2=,eq C 为广义阻力系数,eq m 为等效质量;p 为固有的圆频率,eq eq m K p /2=,eq K 为等效刚度。在阻尼比 1/<=p n ζ的小阻尼情况下,运动规律为)sin(22α+-=-t n p Ae q nt ,式中A ,α由 运动的起始条件决定, d f n p π222=-。 具有粘滞阻尼的单自由度振动系统,在广义简谐激振力t H t s ωsin )(=作用下,系统强 迫振动微分方程的标准形式为t h p q n q ωsin 22 =++ ,式中/eq h H m =。系统稳态强迫振 动的运动规律)sin(?ω-=t B q ,式中 振幅2 2 2 20 2 2 2 22 4)1(4)(λ ζλω ω+-= +-= B n p h B 相位差2 2212arctg 2arctg λ ζλ ωω?-=-=p n 其中eq k H p h B == 2 0,p ωλ=。 由台面、支撑弹簧片及电磁阻尼器组成的水平振动台,可视为单自由度系统,它在瞬时或持续的干扰力作用下,台面可沿水平方向振动。 1. 衰减振动:
六自由度汽车驾驶运动模拟器设计
摘要 汽车驾驶模拟器是一种用于汽车产品开发、“人—车—环境”交通特性研究或驾驶培训的重要工具。近年来,由于具有安全性高、再现性好、可开发性强、成本低等显著特点,研究开发驾驶模拟器已经成为国内外一个重要发展方向。 本文在查阅国内外大量资料的基础上,结合老师的研究课题主要对六自由度汽车驾驶模拟器液压系统部分进行设计。六自由度汽车运动模拟器采用液压伺服阀控制液压缸来驱动模拟平台的运动,以实现汽车驾驶模拟器运动姿态模拟。本文主要进行机械机构的设计、液压伺服系统设计、液压泵站设计和液压缸的设计等。 通过模拟器的机构设计和驱动液压伺服系统设计,结合电气系统能够实现汽车在不同运行状态的模拟,当驾驶员坐在驾驶舱系统的座椅上进行模拟驾驶时,完全能够感受到实际汽车驾驶的各种体感,为实车训练驾驶提供了可替代的模拟平台;本设计也为今后的进一步研究及其在娱乐模拟器、动感电影等产业的实际推广和应用方面奠定了基础。 关键词:汽车驾驶模拟器六自由度运动平台液压伺服系统运动姿态控制
Abstract The Automobile-driving i an important tool which used for the development of auto mobile product and the study of the transportation characteristics of “man-car-environment”or the driver training .In recent years, the study of the automobile-driving simulator used for development has become an important development direction in the world because of the notable characteristics of high safety, well reappearance of scene, easy to develop and low cost. This article is based on searching the large quantity of information about at home and abroad, and combines with the tea cher’s research task which mainly designs the part of 6-dof driving Simulator of hydraulic system .The 6-dof motion simulator adopts valves of hydraulic servo to control actuator to drive the movement of driving simulation platform, and to achieve the movement posture simulation of the automobile driving simulator. This article is mainly about the designing of machine, the system of hydraulic servo, hydraulic pump station, and actuator and so on. According to the designing of agencies of simulator and hydraulic servo system, it can combines the electrical system which can bring out the imitation of cars in different movement conditions, when the driver simulating drive on the seat of cockpit system, you can feel the feeling of driving a true car, and it also offer the simulator platform which can be replaced for true driving training. At the same time, this designing is also establishes for the further researches and the practice extension and use. Keywords:Driving-automobile simulator, 6-dof of motion platform, the system of hydraulic servo, the control of campaign attitude
六自由度液压伺服平台实验报告
六自由度液压伺服平台实验报告 一、实验目的。 1、掌握电液位置伺服控制系统的基本原理; 2、掌握六自由度平台的结构解算的概念及其软件实现; 3、掌握VB6.0软件与下位机PAC通过以太网通信的方法; 4、掌握6SPT-1六自由度液压伺服平台复现指令信号的实施方 法。 二、实验方式:演示实验。 三、实验内容。 1、根据六自由度平台系统原理图和相关电气元器件接线说明设 计电控系统,演示模拟地震实验; 2、了解影片动作文件的编辑,熟练操作六自由度影片播放软件; 3、熟练操作六自由度平台调试软件; 四、实验原理。 1、电液位置伺服控制系统的基本原理 电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。控制系统结构图如图3.1所示:
图3.1电液位置伺服控制系统结构图 2.六自由度平台逆解算法 图3.2 空间机构位置关系示意图 六自由度平台又称为Stewart平台,其结构如图3.2所示,Stewart 平台由上、下两个平台、六个驱动关节和连接球铰组成,上平台为运动平台,下平台为基座,上、下平台的六个铰点分别组成一个六边形,连接6个液压缸作为驱动关节,每个液压缸两端各连接一个球铰。六个驱动关节的伸缩运动是独立的,由液压比例压力阀控制各液压缸作伸缩运动,从而改变各个驱动缸的长度,使动平台在空间的位置和姿态发生变化。因此该平台是通过六个驱动杆的协调动作来实现三个线性移动及三个转动共六个自由度的运动。 Stewart平台机构的空间位置关系是指运动平台的六个自由度与六个驱动杆长度的关系,是研究该并联机构最基本的任务,也是机构速度、加速度、误差分析、工作空间分析、动力分析等的基础。 对于6-SPS平台机构,其特点是动静平台铰点共面,考虑到工作空间的对称性要求,将平台的6个铰点分成3组,三组铰点沿圆周
数据结构(C语言)实验报告_飞机订票系统
《数据结构》课程设计报告 一、订票系统 【需求分析】 本订票系统要能够实现航班情况的录入功能、航班的查询功能、订票功能、退票功能以及管理本系统的功能即能够修改航班信息。 具体分析如下: 1、录入功能 可以录入航班信息,如录入航班号,到达城市,起飞时间,飞机票数,票价。 2、查询功能 可以查询航班的各项信息,如可以查询起降时间,起飞抵达城市,航班票价,确定航班是否满仓,航班号。 3、订票功能 可以订票并且记录下乘客的相关信息如记录下乘客,,所订航班的航班号以及所订的票数。 4、退票功能 可以退票并且记录乘客的相关信息以及退票信息。 5、修改功能 可以根据需要由管理员对航班信息进行修改更正。 【概要设计】 1、算法设计:每个模块的算法设计说明如下: (1)录入模块: 查找单链表的链尾,在链尾插入一个“航班信息”的新结点。 (2)查询模块: 提供两种查方式:按航号和按航线查询,1代表按航号查询,2代表按航线查询。0则表示退出查询。 顺着单链表查找,如果与航班号(航线)一致,输出相关信息,否则,查询不成功。 (3)订票模块: 查找乘客要订的航班号,判断此航班是否有空位,有则输入乘客有关信息,订票成功,否则失败。 (4)退票模块: 输入要退票的乘客以及证件,查找乘客资料的链表中是否有这位乘客,有则删去此结点,并在空位加上1,无则退票失败。 (5)修改模块: 输入密码,确认是否有权限对航班信息进行修改,有则在航班信息链表中查找要修改的结点,进行修改,否则不能修改。 2.存储结构设计: (1)航班的信息:为了便于查找和修改,航班的情况存储结构采用单链表,每个元素表示一个航班的情况,包括航班号、起飞达到的时间、空座和目的的、票价以及限座七个数据项:
模拟电子线路multisim仿真实验报告
MULTISIM 仿真实验报告
实验一单级放大电路 一、实验目的 1、熟悉multisim软件的使用方法 2、掌握放大器的静态工作点的仿真方法,及对放大器性能的影响。 3、学习放大器静态工作点、电压放大倍数,输入电阻、输出电阻的仿真方法,了解共 射级电路的特性。 二、虚拟实验仪器及器材 双踪示波器信号发生器交流毫伏表数字万用表 三、实验步骤 1.仿真电路图 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 1 R7 5.1kΩ 9 XMM1 6 E级对地电压25.静态数据仿真
仿真数据(对地数据)单位;V计算数据单位;V 基级集电极发射级Vbe Vce RP 2.834 6.126 2.2040.63 3.92210k 26.动态仿真一 1.单击仪表工具栏的第四个,放置如图,并连接电路。 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 R7 5.1kΩ XSC1 A B Ext Trig + + _ _+_ 6 1 9
2.双击示波器,得到如下波形 5.他们的相位相差180度。 27.动态仿真二 1.删除负载电阻R6 V1 10mVrms 1kHz 0° R1 100kΩ Key=A 10 % R2 51kΩ R3 20kΩ R4 5.1kΩ Q1 2N2222A R5 100Ω R6 1.8kΩ C1 10μF C2 10μF C3 47μF 3 7 V2 12 V 4 5 2 XSC1 A B Ext Trig + + _ _+_ 6 1 9 2.重启仿真。