注射机和标准模架的选型
注射机选型:
1)注射量计算
(1)塑件质量、体积计算
由Pro/E得:塑件体积V1=2.798cm3 m1=ρv=1.2×2.798=3.3576(取PC的密度
为1.2g/cm3),流道凝料的质量m2还是未知数,按塑件质量的0.2倍来估算,又
因为是一模两腔,所以注射量为:
m=1.2nm1=1.2×2×3.3576=8.05824g
V=m/ρ=8.05824/1.2=6.7152cm3
(2) 塑件和流道凝料在分型面上的投影面积及所需锁模力的计算
流道凝料在分型面上的投影面积A2,在模具设计前是个未知值,根据多型腔模
的统计分析,A2是每个塑件在分型面上的投影面积A1的0.2倍~0.5倍,因此可
用0.35nA来计算估计,所以:
A=nA1+A2=nA1+0.35nA1=1.35nA1
A1=B×L=26.4×111.7=2948.88mm2
A2=0.35nA1=0.35×2×2948.88=2064.216mm2
模具所需锁模力F m=AP型=7961.976×35=278.669KN(式中型腔压力P型取35MPa)
2)选取注射机:
根据以上每一生产周期的注射量和锁模力的计算值
由V型≤0.8V注
F m<F锁
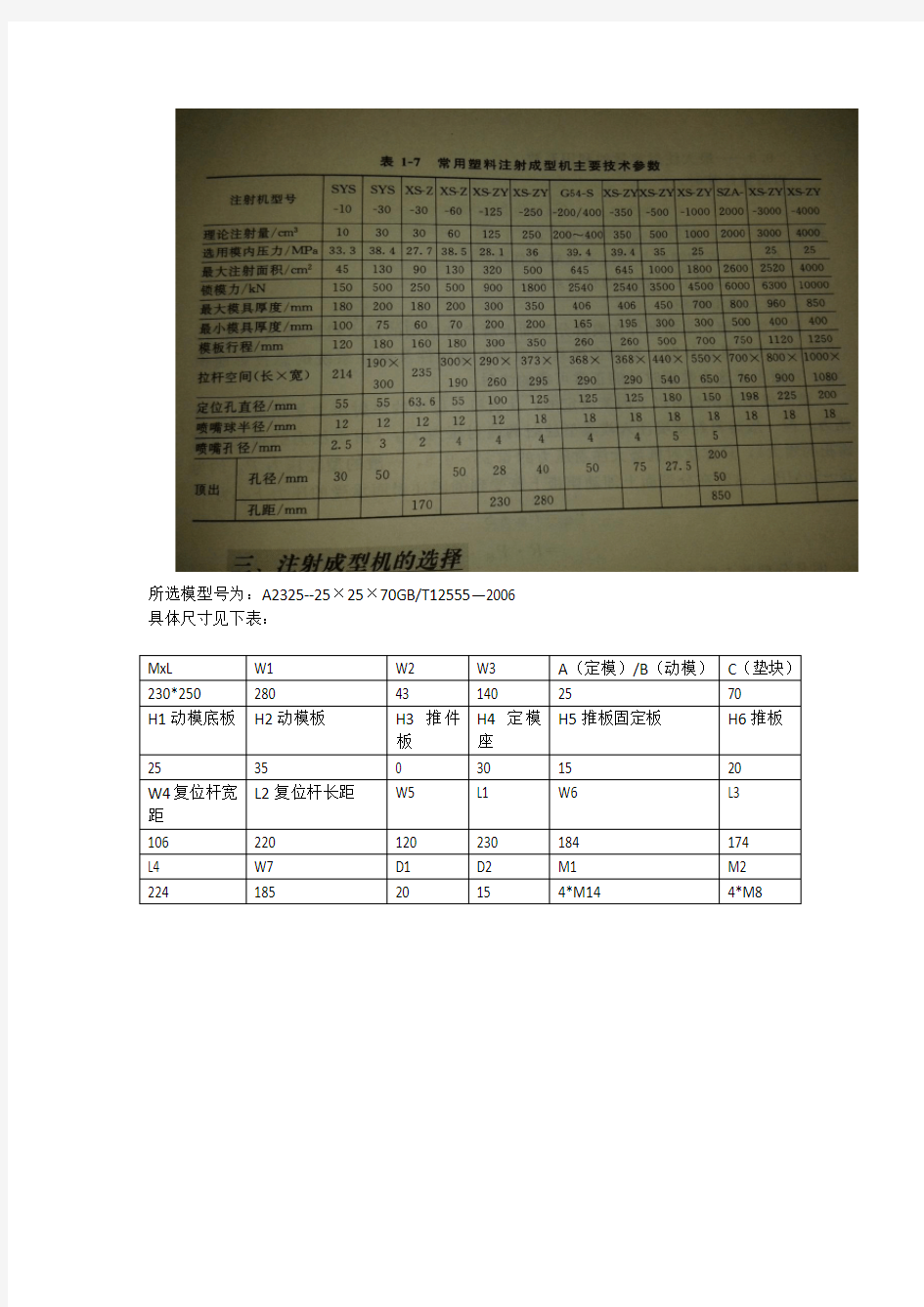
初选SYS—30型
所选模型号为:A2325--25×25×70GB/T12555—2006 具体尺寸见下表:
电机安装技术规范
电机安装技术规范 1?目的 规范电机选型、采购、验收、安装、维护、修理、报废七项管理职责。2?适用对象 本工艺标准适用于一般工业安装工程固定式交、直和同步电动机及其附属安装。 3准备 设备及材料要求: 电动机应有铭牌,注明制造厂名,出厂日期,电动机的型号、容量、 频率、电压、电流、接线方法、转速、温升、工作方法、绝缘等级等有关 技术数据。 电动机的容量、规格、型号必须符合要求,附件、备件齐全,并有出厂合格证及有关技术文件。 电动机的控制、保护和起动附属设备,应与电动机配套,并有铭牌, 注明制造厂名,出厂日期、规格、型号及出厂合格证等有关技术资料。 各种规格的型钢均应符合设计要求,型钢无明显的锈蚀。并有材质证明。 螺栓:除电机稳装用螺栓外,均应采用镀锌螺栓,并配相应的镀锌螺母平垫圈、弹簧垫。 作业条件: 在室外安装的电机,应有防雨措施。 电动机的基础、地脚螺栓孔、沟道、电缆管位置尺寸应符合设计质量 要求。 电动机安装场地应清理干净、道路畅通。
电动机驱动设备已安装完毕,且初检合格4操作规范 设备拆箱点件: 设备拆箱点件检查应有安装单位、供货单位、建设单位共同进行,并作好记录; 按照设备供货清单、技术文件,对设备及其附件、备件的规格、型号、数量进行详细核对; 电动机本体、控制和起动设备外观检查应无损伤及变形,油漆应完好; 电动机及其附属设备均应符合设计要求。 安装前的检查 电动机安装前应进行以下检查: 电动机应完好,不应有损伤现象。盘动转子应轻快,不应有卡阻及异 常声响。 电机的附件、备件应齐全无损伤。 电动机的安装: 电动机安装应由电工、事业部维修人员,大型电动机的安装需要搬运和吊装时应有起重工配合进行。 应审核电动机安装的位置是否满足检修操作运输的方便。 固定在基础上的电动机,一般应有不小于1.2m维护通道。 采用水泥基础时,如无要求,基础重量一般不小于电动机重量的3倍。基础各边应超出电机底座边缘100?150mm
proe3-4-5标准件库安装方法和使用教程
Pro/Engineer标准零件库林清安版安装介绍 网上很难找,找到也下载不了,我费了十几个小时不眨眼在网上转总算也小有收获,网上的方法都是安装版的PROE安装方法,而我目前正在用的是绿色版本的PROE4.0和PROE5.0,自已用起来得心应手,不想再去找安装版,体积又大又笨重,而且重系统崩溃后还得重装重破解,还是用绿色版好。在我之前没有发现绿色版下的安装教程,那就我来写好了!!!!!! 如果想要软件,大家可以到网上下载,我这里有PORE4.0M100和PROE5.0M010两个全都是绿色破解版的。标准件库是林清安PROE标准件库StdPart2.1_chs,这款软件是为PORE3设计的,免费下载免费注册,但木马放羊我本人也无法提供下载地址,非常抱歉! 所以我们现在用的4.0和5.0有很多需要改动的地方。具体问题和下载地址联系我QQ:21547057 木马放羊 本次以proe5.0为例进行安装 第一部分,在绿色版PROE下的安装: (注:如果是正常安装版可以跳过第一部分内容) 首先打开注册表:开始/运行/regedit 如果是绿色版本你会发现和安装版的不太一样,那就是在注册表中没有如下部分的注册内容,需手动添加到注册表内: 在HKEY_LOCAL_MACHINE\SOFTWAEW\PTC项下面建立以下各子项:pro/ENGINEER\windfire 3.0,并键入值(如上图),注意地址位置,是根据PROE安装位置而定的,依实际情稍做改动,(实际上右侧键值中只要Intalldir一行即可,把位置改正确) 经过木马放羊本人测试,此种安装方法可以在PROE3.0、proe4.0和proe5.0上正常使用,6.0没有测试过,哪位网友有兴趣可以试试。 然后按第二部分内容进行
电机选型知识
旋转电机选型知识 一、电机的基本运行条件 GB755-2000《旋转电机定额和性能》中规定的电动机的基本运行条件包括:对海拔高度、环境温度、冷却介质和相对湿度的要求,电气条件,运行期间电压和频率的变化,电机的中点接地等规定。 1、海拔:一般不超过1000M。特殊要求,如微特电机的运行的海拔高度可达2500~31200m。 2、最高环境空气温度:电机运行地点的环境温度随季节而变化,一般不超过40℃。但一些专用电机可超过40℃,微特电机的最高环境温度为125℃。 3、最低环境温度:对已安装就位处于运行或断电停转电机,运行地点的最低环境温度为-15℃;对微特电机最低空气温度为-55℃。对于用水作为初级或次级冷却介质的电机的最低环境空气温度为5℃。 4、环境空气相对湿度:电机运行地点的最湿月份月平均最高相对湿度为90%,同时,该月月平均最低温度不高于25℃。 5、电压和电流的波形对称性:对于交流电动机,其电源电压波形的正弦性畸变率不超过5%;对于多相电动机,电源电压的负序分量不超过5%(长期运行)或1.5%(不超过几分钟的短式运行),且电压的零序分量不超过正序分量的1%。 6、运行期间电压的偏差:当电动机的电源电压(如为交流电源时,频率为额定)在额定值的95%~105%之间变化,输出功率仍能维持额定值。当电压发生上述变化时,电机的性能和温升允许偏离规定。 7、运行期间的频率偏差:但交流电机的频率(电压为额定)额定值的偏差不超过±1%时,输出功率仍能维持额定值。 8、电压和频率同时发生偏差:电压和频率同时发生偏差(两者偏差分别不超过±5%和±1%),若两者都是正值,且其和不超过6%;或两者均为负值,或分别为正值和负值,且其绝对值之和不超过5%时,电机输出功率仍能维持额定值。 9、电机的中性点接地:交流电机(Y连结)应能在中性点处于接地电位或接近接地电位的情况下连续运行。如果电机绕组的线端与中性点端的绝缘不同,应在电机的使用说明书中说明,未征得电机厂同意,不允许将电机的中性点接地或将多台电机的中性点相互连接。 二、电机的电压和频率的选取 1、我国的工频及电压:我国的工频电的频率是50Hz,电压等级分为:220V、380V、660V、1140V、3300V、6000V、10000V。
电机分类及选型
电机分类及选型 一、电机分类: 电机是发电机和电动机的统称。其中发电机分为三相同步发电机和单相同步发电机。而电动机分为同步电动机和异步电动机。并且异步电动机更加广泛使用。异步电动机又分为:三相异步电动机和单相异步电动机。三相异步电动机还分为铸铁壳和铝壳两种,一般铸铁居多(标注字母Y、Y2、AS、JO2、JW、YS),铝壳较少(标注字母MS)。单相异步电动机包含有:1.单相电容起动异步电动机:YC(CO2)、JY、MC(铝壳);2.单相电阻起动异步电动机:YU(BO2)、JZ 、MU(铝壳);3.单相电容运转异步电动机:YY(DO2)、MY(铝壳);4.单相双值电容异步电动机:YL、ML(铝壳);5.罩极电动机。 二、电机主要性能对比:
三、电机型号命名: Y 2 100 L 2 — 4 系第中机铁极 列二心座心数 代次高长长 号设 计 1、系列代号: Y 2、设计代号: 2为第二次设计(改进) 1 为第一次设计 3、中心高H:从电机轴伸中心轴线至底脚平面的高度。按标准有:56、63、71、80、90、100、112、132、160、180、225、280、315及以上(中型电机) 4、机座长(L):按长短分S—短、M—中、L—长 5、铁心长:1—短、功率小;2—长、功率大 6、极数:影响电机转速。约:2极—2850r/min 4极:1450r/min 6极—930r/min 8极:720r/min 四、电机主要性能指标: 效率η:输出功率/输入功率0.4~0.9 功率因素:Cosφ0.6~0.98 起动转矩:0.5~3.0 起动电流:起动电流/额定电流=4~7倍 最大转矩:1.6~2.2倍 最小转矩:大于1.2倍
步进电机的选用及电机型号参数尺寸标准
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。一般地说最大静力矩Mjmax大的电机,负载力矩大。 选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分辨率,不改变其精度。精度是由电机的固有特性所决定。论文天地欢迎您 选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。 选择步进电机需要进行以下计算: (1)计算齿轮的减速比 根据所要求脉冲当量,齿轮减速比i计算如下: i=(φ.S)/(360.Δ) (1-1) 式中φ---步进电机的步距角(o/脉冲)
S ---丝杆螺距(mm) Δ---(mm/脉冲) (2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。 Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2) 式中Jt ---折算至电机轴上的惯量(Kg.cm.s2) J1、J2 ---齿轮惯量(Kg.cm.s2) Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N) S ---丝杆螺距(cm) (3)计算电机输出的总力矩M M=Ma+Mf+Mt (1-3) Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4) 式中Ma ---电机启动加速力矩(N.m) Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2) n---电机所需达到的转速(r/min) T---电机升速时间(s) Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5) Mf---导轨摩擦折算至电机的转矩(N.m) u---摩擦系数 η---传递效率 Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6) Mt---切削力折算至电机力矩(N.m) Pt---最大切削力(N) (4)负载起动频率估算。数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为 fq=fq0[(1-(Mf+Mt))/Ml)÷(1+Jt/Jm)] 1/2 (1-7) 式中fq---带载起动频率(Hz)
电动机的选型
电动机的选型 1.负载的种类、特性与要求 为防止电动机因选配不当而发生故障或损坏,在选定电动机时必须详细了解被拖动负载的种类、特性和要求,然后尽可能去选择满足这些特性和要求的电动机。 1.1被拖动负载应考虑的主要事项 (1)被拖动负载的类型; (2)被拖动负载所需的功率; (3)被拖动负载所需的转速; (4)被拖动负载的转速—转矩特性; (5)是否需要进行转速调节(分有级变速、无级变速); (6)被拖动负载转动惯量的大小; (7)被拖动负载要求的起动方式(分手动、自动及遥控等); (8)被拖动负载的制动方式(分一般制动、快速制动等); (9)被拖动负载的工作制(分连续、短时、断续、变负载工作制等); (10)被拖动负载是否需要可逆运转; (11)被拖动负载的安装型式; (12)工作时的环境条件(温度、湿度高低,有无腐蚀、爆炸性气体和液体,有无滴水和粉尘等)。 1.2电动机的技术要求 当根据被拖动负载以上的要求去选择确定电动机时,须考虑以下的技术要求: (1)电动机的类型; (2)电动机的额定功率; (3)电动机的额定电压、相数及频率; (4)电动机的额定转速; (5)电动机的起动转矩及最大转矩; (6)电动机的转速—转矩特性; (7)电动机的工作定额(连续、短时、断续定额等);
(8)电动机能否进行转速调节; (9)电动机的绝缘等级; (10)电动机的外壳防护型式; (11)电动机轴伸中心高及轴伸尺寸; (12)电动机的安装型式(分卧式、立式和凸缘式等); (13)供电电源容量; (14)电动机所使用的起动和控制设备; (15)相关附件(如安装用底座等)。 选择电动机的步骤和内容主要有:应以被拖动机械、设备的具体要求出发,并考虑使用场所的电源、工作环境、防护等级,以及电动机的功率因数、效率、过载能力、安装方式、传动设备、产品价格、运行和维护费用等情况来选择电动机的电气性能和机械性能,使被选定的电动机能安全、经济、节能和合理地运行。选择电动机的过程中其功率的确定极为重要,选择原则应该是在电动机能够满足被拖动负载要求的前提下,最经济、合理地确定电动机功率的大小。如果电动机的功率选得过大,不仅使设备投资费用增加,而且还会因电动机长期轻载运行致使其功率因数和效率降低;相反,若电动机的功率选得过小,电动机将经常过载运行,从而使电动机温升增高、绝缘老化以致使用寿命缩短;此外还有可能出现起动困难和经受不起冲击性负载等情况。因此,必须慎重权衡、正确合理地选择电动机的功率。 对于所选电动机的类型应能够满足生产机械各个方面的要求,如被拖动负载的性质、工作制、转速、起动特性、制动要求、过载能力及调速特性等;并应按经济合理的原则来选择电动机的类型,如电流种类、结构型式、电压等级和冷却方法等;同时所选电动机的类型除应能满足生产机械工艺过程的要求外,还应满足电源的要求,如对于供电容量较小的电源则应考虑起动时保持供电线路电压稳定,以及使电源的功率因数保持在合理范围;此外所选电动机还应适当留有备用功率,一般均使用电动机的负载率为0.75~0.9左右。电动机的结构型式和绝缘等级应满足安装与使用环境的要求,以保证电动机能够长期、可靠、安全地运行。 1.3动机类型的选择
步进电机选型
步进电机选型 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1) 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A 偏移(て-1/3て)=2/3て。如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这
气动马达选型参考资料
气动马达选型 随着经济的发展,气动马达在工业自动化领域得到了广泛应用,托高公司长期致力于气动马达,气动设备的研发、设计、制造、销售与服务,我们在长期的生产制造实践中掌握了各类气动马达的结构,性能及特性,我们在气动马达选型方面有着非常丰富的经验,我们很乐意和大家一起分享气动马达选型和使用中的一些经验。 气动马达选型取决于四大因素:①功率;②扭矩;③转速;④耗气量 1.根据您的实际应用可以选择不同功率,不同扭矩,转速的马达,在此例举部分应用的选 型在工作压力增高,马达的输出功率、转矩和转速均大幅度增加;当工作压力不变时,其转速、转矩及功率均随外加载荷的变化而变化,样本所有数据和曲线都是在马达供气压力为6bar时测得的。以下图表表明的是压力对速度,指定扭矩,功率和耗气量的影响。 在(图一)曲线中从使用的供气压力点开始,然后向上看功率,扭矩和耗气量曲线。 举例:在4bar供气压力下,功率只有的0.55倍,扭矩0.67倍,速度0.87倍,耗气量0.65倍在6bar时参数. 这个实例表明如果供气压力下降,功率是如何下降的。空气必须通过合适尺寸的管子供给,以减少控制回路中任何的潜压降。 节流 最通常降低气马达速度的方法是在进气口安装流量调节阀。当马达用进气口也可用于排气口。流量调节也用于主要排气口上,这样可以在两个方向上控制速度。 压力调节 通过在上游供气处安装一只减压阀,也可以调节速度和扭矩。当连续供给马达低压的空气并且马达减速时,会在输出轴上产生很低的扭矩。 工作扭矩 (图二)表中曲线当负荷不断增加,空气马达停止,这就是停止扭矩。当负荷减少时马达恢复工作,马达不会烧毁,这就是气马达的最大特点,由于受润滑和摩擦的影响,起动扭矩一般是停止扭矩的75-80%,从图中可看出马达功率变得最大值的位置,大约是马达一半的旋转速度时。因此,可以通过降低马达速度获得马达最大功率,扭矩,并可以节约气源消耗。 马达减速 如果空气供应压力有限制,可通过减速得到高扭矩,举例5:1,10:1的减速,性能曲线变得如(图三)表所示,最大马力维持不变,即使在减速时,扭矩曲线是主要倾向由于扭矩的减速幅度曲线变化很大。 运行速度 1.活塞式空气马达是低速大扭矩型。但是,当它被认为是脉动变得比低速旋转限制较少。 即使是大扭矩,马力变小。当空气马达加减速结构,在这种情况下并行使用,它成为在低转速大扭矩,并能使用几乎在最大马力。推荐的旋转范围为(0.2-1)在最大输出转速. 2.叶片式气动马达是高速型,但空气马达寿命是比不上活塞马达,如果它与远远超过了在最大输出转速旋转使用,马达的效率变得比较低,最好在低速交替使用。在最大输出(0.3-1)建议旋转范围。 气动马达的供气 1.要供给马达的空气必须是经过过滤和减压的。方向控制阀需要向马达供气并在需要时
proe5.0库安装方法(修改版)
proe5.0 挂载标准件库MONLibs. 1.解压MONLibs文件夹,并全部拷贝在D:\下,若不是则对后边步骤中的路径做相应的改动。 2.打开proe5.0安装目录D:\Program Files\proeWildfire 5.0\text中的Config.pro, 添加下面5行: pro_material_dir D:\MONLibs\Materials pro_library_dir D:\MONLibs\ pro_catalog_dir D:\MONLibs\ protkdat D:\MONLibs\protk.dat save_objects changed 3.编辑D:\Program Files\MONLibs内的protk.dat 文件(用记事本打开),修改如下两行: EXEC_FILE D:\Program Files\MONLibs\MON4.dll (proe5.0也是这样写) TEXT_DIR D:\Program Files\MONLibs\text 4.添加系统变量,电脑的控制面板下——系统——高级——环境变量——在系统变量下添加以下语句: MONLIBS_DIR D:\MONLibs pro_library_dir D:\MONLibs 5.将将目录内文件mfc80.dll 和msvcr80.dll文件复制到C:\WINDOWS\system32目录下。 6.解压后点击安装proe5.0的安装目录中的i486_nt\pvx里的pvx.exe,安装到D:\Program Files (注:pvx.exe这个文件如果找不到可以复制4.0里面的,或者别人电脑里的;再如果找不到i486_nt,运行安装目录下bin\i486_nt_ptc_setvars.exe生成;也可以到这里下载pvx.exe文件https://www.360docs.net/doc/bd18627026.html,/s/1hqigbtU) 7.复制完成后,请依此分别运行下面两个程序 (1)双击D:\MONLibs\pbc.exe生成菜单,然后将生成的MONLibs.ctg.1文件复制到D:\proeWildfire 5.0\bin 文件夹内; (2)双击D:\Program Files\proeWildfire 5.0\bin\pro_build_library_ctg.bat更新菜单. 8.做完以上步骤后,打开proe5.0,新建装配图,就会发现在右上角多出了一个瀑布式的菜单管理器,恭喜你,安装成功了,如果出现“MENU文件不存在或文件名不正确”是说你的标准件库里面相应文件,也就是GBLib文件夹内没有标准文件给PVX打开,到了这里已经和PVX没有关系了,说明你已经正确安装好了,有标准件在文件夹内就不会再出现这个提示了 9. 出现“MENU文件不存在或文件名不正确”时,应该把每个标准件解压后把解压文件放置D:\MONLibs\GBLib中。。。(注意:解压文件一般解压出来在解压的文件夹里面还有一个同名的文件,应该吧这个同名的文件放置在安装目录中。)
UG标准件库的使用方法
1.将stdlib整个文件夹COPY到X:\Program Files\EDS\Unigraphics NX 2.0目录下(X为UG的安装盘符); 2.用记事本打开X:\Program Files\EDS\Unigraphics NX 2.0\UGII\menus目录下的custom_dirs.dat文件,在最后增加一行输入stdlib 文件夹的绝对路径(X:\Program Files\EDS\Unigraphics NX 2.0\stdlib),保存; 3.重新启动UG. 4.进入UG之后,在自定义里把标准件工具条拿出来就可以用了。 一、基于UG的标准件库的建立原则 1.每个标准件都应有一个中心基准(如基准点或基准轴或基准面,主要使用三面基准),建立标准件时,坐标系(相对坐标和绝对坐标)应在该标准件的对称中心位置。 2.应尽量减少特征数,特征间尺寸用关系表达式表示。将特征数分为主参数和次要参数,用主参数去控制和约束次要参数。 3.每个标准件应在菜单“装配(Assemblies)”中设置“参考集(Reference Rets)”,调出时仅显示特征实体(Solid)。 4.对于一个由几个标准零件装配在一起而组成的标准部件,要注意建立标准部件内各个标准零件之间的参数值传递,即建立各个标准零件之间的尺寸链接关系,并用一个主要的标准零件去控制和约束其它的次要标准零件。 二、标准件的创建方法 1.电子表格(SpreadSheet)法 (1)File→New,输入一个标准件Part文件名。 (2)Application→Modeling,选取适当参数和方法步骤建立标准件中的一个具体零件(Template Part),由于建立Template Part 的方法和步骤将直接决定参数的选取,故应从整体考虑。 (3)Toolbox→Expression,对参数表达式进行Rename和Edit。 (4)Toolbox→Part Families,在Available Columns栏内选定参数,点击Add Column放在Chose Column栏内,待选定所有参数后,点击Create进入Spreadsheet(电子表格)内。 (5)填写并编辑Spreadsheet。在Spreadsheet内要输入零件号(Part_Name)和相关参数值。填写完毕后,可选Part Family的Verify Part来生成某零件,以明确参数选定否正确。待上述工作准确无误后,可选Part Family的Save Family来存贮该电子表格。(6)标准件的调用。Assemblies→Edit structure,点击Add;在Part Name内指定所选标准件;在Point Subfunction内指定欲加入零件的位置[如(0,0,0)],样标准零件即在指定点处生成。 优点:提供了一个用UG 3D实体格式定义的标准件库系统,创建直观、容易,并能通过直观的图形界面调入装配体;可使标准件具有子装配功能,并可以封装到IMAN和UG/Manager中,是建立UG标准件库系统的通用方法。缺点:调用时须改名存入,如果不改名只能存入当前目录且不能修改,当型号选好后又需要换型号时则必须重新装配。 2.关系表达式(Expression)法 (1)File→New,输入一个标准件Part文件名。 (2)Application→Modeling,选取适当参数和方法步骤建立标准件中的一个具体零件(Template Part)。 (3)To olbox→Expression,对参数表达式进行用户化命名(Rename)和编辑(Edit)。 表达式的编辑方法:1)在“编辑多个表达式”对话框中,点击“输出”,在目录下给定一个文件名(如e.exp)并退出UG。2)对表达式文件e.exp进行编辑并存储。3)返回UG,打开该Part文件,进入“编辑多个表达式”对话框,点击“输入”,输入将该表达式文件。(4)File→Save,存储该零件(.prt)。 (5)零件调用。Assemblies→Edit structure,点击Add;在Part Name内指定所选标准件;在Point Subfunction内指定欲加零件的位置[如(0,0,0)],这样标准零件即在指定点处生成。然后,将该零件以另一名称存储,转成装配模型中的一个具体零件。最后,将该零件转成工作零件并修改其参数,使之符合设计要求。 优点:创建容易,修改比较方便。缺点:装配调入的只是一个模板,完成装配后需修改其变量;需查标准件手册来修改变量值。3.用户自定义特征(.udf)法 (1)File→New输入一个标准件Part文件名,Application→Modeling生成一个Part文件。 (2)Toolbox→Expression对参数表达式进行用户化命名(Rename)和编辑(Edit)。 (3)File→Export,生成、定义、存储一个udf文件。
电机选型
电机选型 一、概况 Y、YR系列.YKK、YRKK、YKS、YRKS系列高压三相异步电动机(中心高355-630豪米)是JS、JSQ、JR和JRQ老系列产品的更新换代产品。 本系列电动机用料考究、制造精良、具有力能指标高、噪声及振动小,可靠性高,使用安装维修方便等优点。 本系列电动机的功率等级、安装尺寸、电气性能均符合国家标准GB755《旋转电机基本技术要求》,国际电工委员IEC标准和机械电子工业部企业标准JB/DQ3134,JB/DQ3135,JB/DQ3436和JB/DQ3437。 本系列电动机各部分机械尺寸、公差均符合国家标准G B1800-1804和国际标准化委员会ISO标准。 本系列电动机的外壳防护等极根据GB4942-1和IEC34-5《电机外壳防护等级》有IP23和IP44两种,防滴式IP23电动机也可按用户提出的要求制成管道通风式IPR44。如果用户需要其他防护等级如IP24及IP5 4等可另行协商。本系列电动机的冷却方式根据GB1993和IEC34-6《电机冷却方法》的标准,有IC01、I C611和IC81W等三种。如果用户要求其他冷却方法可另行协商。 本系列电动机基本安装方式为卧式带底脚(IMD3)结构,符合GB997和IEC34-7《电动结构及安装型式代号》的规定。 二、型号说明(Nomenclature) 本系列电动机按照转子类型、防护等级及冷却方式可分为以下六个系列: According to the type of rotor,enclosure protection degree and type Cooling. The motors of these series are classilfed as follows: 三、结构说明 电动机采用箱式结构。机座采用钢板焊成的箱型结构,重量轻、刚度好。机座两侧面及顶部均有窗孔,可以安装防护罩或盖板,拆下防护罩或盖板后可以观察及触及电机内部,便利电机的维护和修理。
proe5.0标准件库安装教程
标准件库安装教程(64位) 步骤1: 1.解压MONLibs文件夹,并全部拷贝在E:\MONLibs下。
2.打开启动目录下的Config
3.编辑E:\MONLibs\内的文件(用记事本打开),修改如下两行:EXEC_FILE E:\MONLibs\ TEXT_DIR E:\MONLibs\text
4.添加系统变量,电脑的控制面板下——系统——高级——环境变量——在系统变量下添加以下语句: MONLIBS_DIR E:\MONLibs pro_library_dir E:\MONLibs
5.将将目录内文件和文件复制到C:\WINDOWS\system32目录下。 6.安装E:\MONLibs\Pvx\
7.请依此分别运行下面两个程序 (1)双击E:\MONLibs\生成菜单,然后将生成的文件复制到PROE程序安装目录下的\\bin 文件夹内; (2)双击程序安装目录下的更新菜单. 最后打开如果弹出出现无法产生应用程序“Mon”,发生读取错误“No such file or directory,或者无法启动“mon”。就需要你在中删除protkdat D:\gb\MONLibs\然后重新寻找再加载后保存一遍,重启。蓝色字的部分我未做 标准件库安装成功啦!
伺服电机如何进行选型
伺服电机选型技术指南 1、机电领域中伺服电机的选择原则 现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。 各种电机的T-ω曲线 (1)传统的选择方法 这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。很显然。电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。用ω峰值,T峰值表示最大值或者峰值。电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。 (2)新的选择方法 一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。 在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。选择一个合适的传动比就能平衡这相反的两个方面。通常,应用有如下两种方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。一是,从电机得到的最大速度小于电机自身的最大速度ω电机,最大;二是,电机任意时刻的标准扭矩小于电机额定扭矩M额定。
惯量匹配和电机选型
惯量匹配和电机选型标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
惯量匹配和伺服电机的选型 惯量匹配 在伺服系统选型及调试中,常会碰到惯量问题。其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机。在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。 根据牛顿第二定律:“进给系统所需力矩T=系统传动惯量J×角加速度θ”。加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。如果θ变化,则系统反应将忽快忽慢,影响加工精度。由于电机选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。进给轴的总惯量J=伺服电机的旋转惯性动量JM+电机轴换算的负载惯性动量JL。负载惯量JL由(以工具机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到电机轴上的惯量组成。JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。如果希望J变化率小些,则最好使JL所占比例小些。这就是通俗意义上的“惯量匹配”。 传动惯量对伺服系统的精度,稳定性,动态响应都有影响。惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
冲压模具标准模架
附录9冲压模具标准模架表9-1滑动导向对角导柱模架规格 蚀真UN £?
(续〉 凹棋周算 闭合高度 (>#)H 丰件件号.名称及标准编号 1 2 3 4 1 6 上棋座 GB/T 2855.1—90 下模座 GB/T 2855. 2—90 导tt GB/T2861.1—90 GB/T2861. 6—90 数ft L B M>b 量大 1 1 1 1 1 1 规格 200 100 140 170 200 X 100X35 200 X 100X40 130 130 85X38 85X38 160 190 150 ISO 160 195 200X100X40 200X100X50 150 ^oX " ■ ■ 1 ISO Z5X 90X38 28 X ------------------- 90X38 190 225 180 180 125 125 120 150 125X125X30 125X125X3S 110 110 80X28 80X28 140 165 130 oo \z 130 140 170 125X125X35 125X125X45 LG A ■■■ 130 130 85X33 zsx --------------------- 85X33 160 190 150 150 )60 140 170 160X125X35 160X125X40 130 130 85X33 85X33 160 190 150 150 170 205 160X125X40 160X125X50 160 160 95X38 95X38 )90 225 l?0 180 200 140 170 200X125X35 200X125X40 130 130 Z5X 85X33 28 X 85X33 160 190 150 150 170 205 200 X 125X4U ZWX 12b XbU 160 160 95X38 95X38 190 225 180 180 250 160 200 250X125X40 250X)25X45 150 150 100X38 100X38 180 220 “ 170 170 190 235 250X125X45 250X125X55 180 180 ZoX —- 110X43 32X- 110X43 210 255 200 200 160 160 160 200 160X160X40 )60X160X45 150 150 100X38 100X38 180 220 170 170 190 235 160X160X45 160X160X55 180 180 110X43 110X43 210 255 200 200 200 160 200 200X160X40 200X160X45 150 150 60 X 100X38 34 X M 1 ' 100X38 180 220 170 170 190 235 200X160X45 200X160X55 180 180 110X43 110X43 210 255 200 200 250 170 210 250X160X45 250X160X55 160 ?160 105X43 xz 105X43 35X -------------------- 115X48 200 240 190 190 200 245 250X160X50 250X160X60 190 190 SZX??'?’ 115X48 220 265 210 210 200 200 170 210 200X200X45 200X200X50 160 160 105X43 105X43 200 240 190 190 200 245 200X200X50 200X200X60 190 190 115X48 115X48 220 265 210 210 250 170 210 250X200X45 250X200X50 160 160 30 X 105X43 105X43 200 240 190 190 200 245 250X200X50 250X200X60 190 190 115X48 115X48 220 265 210 210
proe标准件库之目前的几种安装方法概述
proe标准件库之目前的几种安装方法概述 关于proe标准件库的几种安装方法简述陈中富2009/12/29日 在proe中,有时我们会用到一些重要零件,如:国标零件,及一些自定义的常用标准件;那么,要如何从proe中很方便的一下子找到 这些零件及这些零件的目录?并且调用零件装配至组件保存后在下次打开时组件能成功打开,不出现失败现象呢? 关于目前国内总体的标准库大体的安装方法;经本人总结大体有3种; 一.简单型安装; 直接建个搜索文件,在proe调用标准件后在下次打开时组件利用这个搜索文件找到调用之标准件使组件打开不失败。 二.较复杂型安装; 建菜单文件(*.mnu)并编辑菜单文件,在下次打开proe时用菜单文件找到标准件,使组件打开不失败;这个很多proe版本能用。 三.复杂型安装(但使用最方便); 编写proe植入程序,直接将国标库植入proe系统,使之紧密挂接。 纵观以上3种安装方法,第三种使用最方便,但安装较麻烦。第二种最实用,因它几乎可与proe的所有版本挂接;但安装也较麻烦。 第一种安装较简单,但用起来不是那么直观方便;而当标准件库位置较多时容易出错,不易修改。 下面我们就简单把这3种方法介绍一下: 第一种: 1.先设置proe库(pro/library)目录;配置文件:pro_library_dir输入后点浏览找到你存放标准件库的位置。保存; 2.建搜索文件,文件名任意,可用中文名(当然,英文更没问题);可放置硬盘任意位
置。建立方法见下: 建个*.txt格式文件(此文件在proe打开时起搜索作用),打开这个*.txt文件,把标准件库终端的完整地址 (*prt、*asm、xxx......位置)输入文件;一行一个地址;如: F:\003-PROE\proe_GB_ku\MONLibs\GBLib\dianqi\xxx... F:\003-PROE\proe_GB_ku\MONLibs\GBLib\gear\xxx... 输入完毕后保存文件退出。 3.设置config.pro配置,打开proe选项,输入配置文件:search_path_file点浏览找到上面建立的那个搜索文件打开并保存。 标准件库的第一种安装方法就安装完毕,当你打开proe装配完标准件并在下次打开时你会发现它不会失败。 第二种: 首先:你下载的国标库必须有“文件生成器:pbc.exe”。这个文件必须放在你的库目录里。然后做以下设置: 1.设置proe库(pro/library)目录;配置文件:pro_library_dir输入后点浏览找到你存放标准件库的位置。保存。 注:库目录名可为中文名。但库内所有标准件文件必须为非中文名。 2.设置文件生成器的目录配置,配置文件:pro_catalog_dir输入后点浏览找到你上面设置的库目录位置。保存。 3.再输入配置:save_objects选changed项,保存。 4.设置系统变量:新建:pro_library_dir=你的库目录路径;如:pro_library_dir=F:\003-PROE\proe_GB_ku。 5.建菜单搜索文件:后缀为*mnu文件;从库目录开始(库目录也要有),每个文件内必须有一个菜单文件,文件名就为上级文件名。 例:F:\003-PROE\proe_GB_ku的菜单文件就为:proe_GB_ku.mnu 6.编辑菜单文件,文件内容就为本文件内的所有文件名描述,当然,要按proe规定的格式编辑;那么是一种什么样的格式呢?见下:
电机选型计算公式总结
电机选型计算公式总结功率:P=FV(线性运动) T=9550P/N(旋转运动) P——功率——W F——力——N V——速度——m/s T——转矩——N.M 速度:V=πD N/60X1000 D——直径——mm N——转速——rad/min 加速度:A=V/t A——加速度——m/s2 t——时间——s
力矩:T=FL 惯性矩:T=Ja L——力臂——mm(圆一般为节圆半径R)
J ——惯量——kg.m2 a ——角加速度——rad/s2 1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量) 8 2MD J = 对于钢材:341032-??= g L rD J π ) (1078.0264s cm kgf L D ???- M-圆柱体质量(kg); D-圆柱体直径(cm); L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。 2.丝杠折算到马达轴上的转动惯量: 2i Js J = (kgf·cm·s 2) J s –丝杠转动惯量(kgf· cm·s 2); i-降速比,1 2 z z i = 3. 工作台折算到丝杠上的转动惯量 g w 22? ?? ???=n v J π g w 2s 2 ? ?? ??=π(kgf·cm·s 2) 角加速度a=2πn/60t v -工作台移动速度(cm/min); n-丝杠转速(r/min); w-工作台重量(kgf); g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm) 2. 丝杠传动时传动系统折算到驱轴上的总转动惯量: ()) s cm (kgf 2g w 1 22 22 1????? ???????? ??+++=πs J J i J J S t J 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf·cm·s 2); J s -丝杠转动惯量(kgf·cm·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg). 5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量