线性范围试验测定实验报告
线性范围试验测定实验报告
一、实验目的
线性范围试验用于评价候选方法的分析测量范围。
二、实验材料
1.试剂:40mmol/L葡萄糖标准溶液、5.55mmol/L葡萄糖标准溶液、1、2号血清质控品、GOD- POD试剂盒
2.器材:722型分光光度计、移液管、移液枪、试管等
三、实验方法
1.原理:使用不同浓度的葡萄糖标准溶液,用GOD-POD法试剂测定各自的浓度,以标准预期浓度为横坐标,实际测得的浓度为纵坐标,在方格纸上作图,即可绘制出一条直线,即计量反应曲线,根据建立的直线方程进行线性范围的评价。
2.步骤:1.将40mmol/L葡萄糖标准溶液与生理盐水进行如下稀释,制作系列标准管。
加入物标准管
0 1 2 3 4 5 40mmol/L葡萄糖标准溶液(ul)0 2 4 6 8 10 蒸馏水(ul)20 18 16 14 12 10 GOD- POD应用液(ml) 3 3 3 3 3 3 各管混匀后,37°C水浴10min,在505nm波长下进行比色
2.用GOD-POD法分别测定系列标准管血糖浓度,测定时做二次重复测定,且测定秩序应随机排列。
四、实验结果
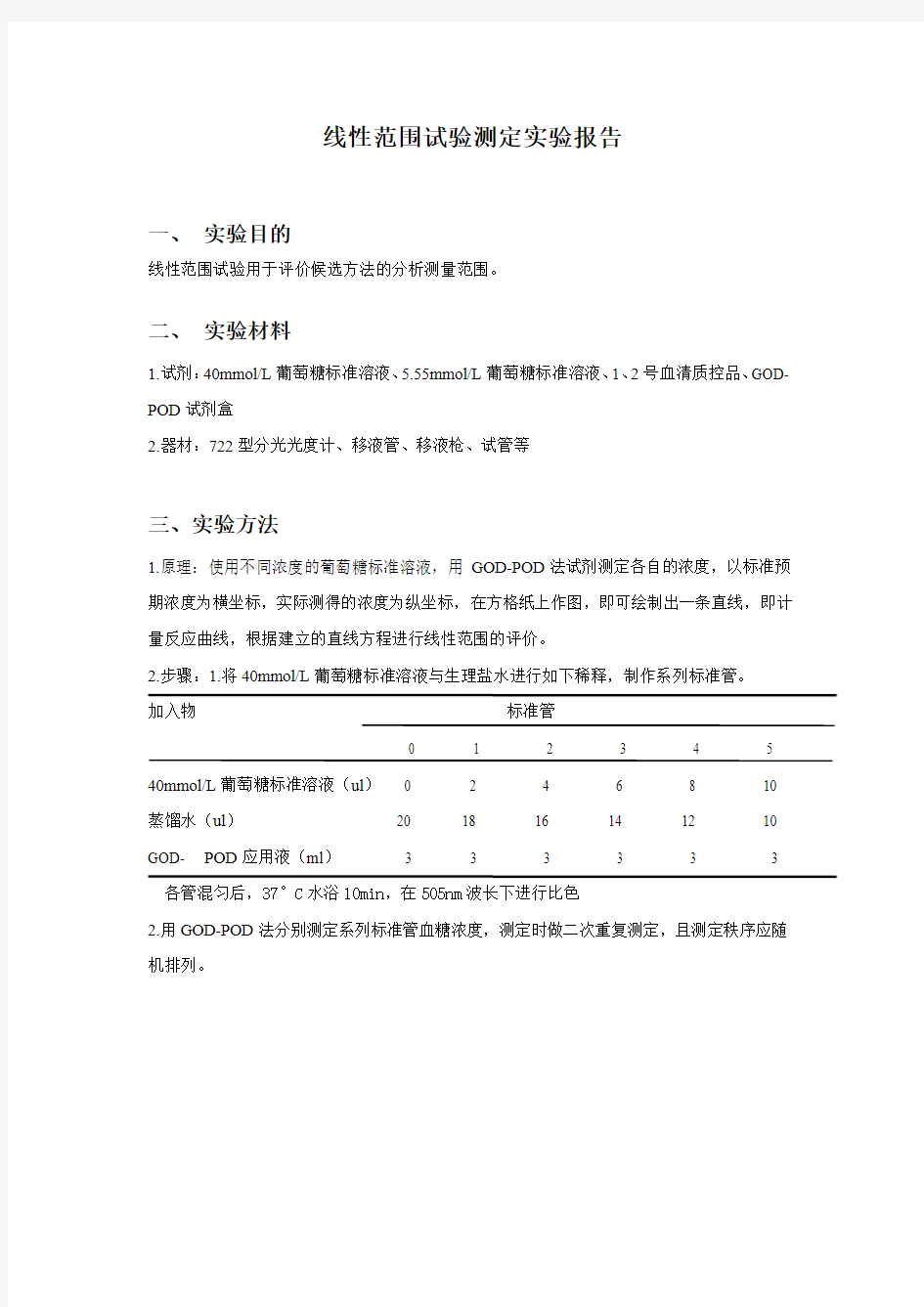
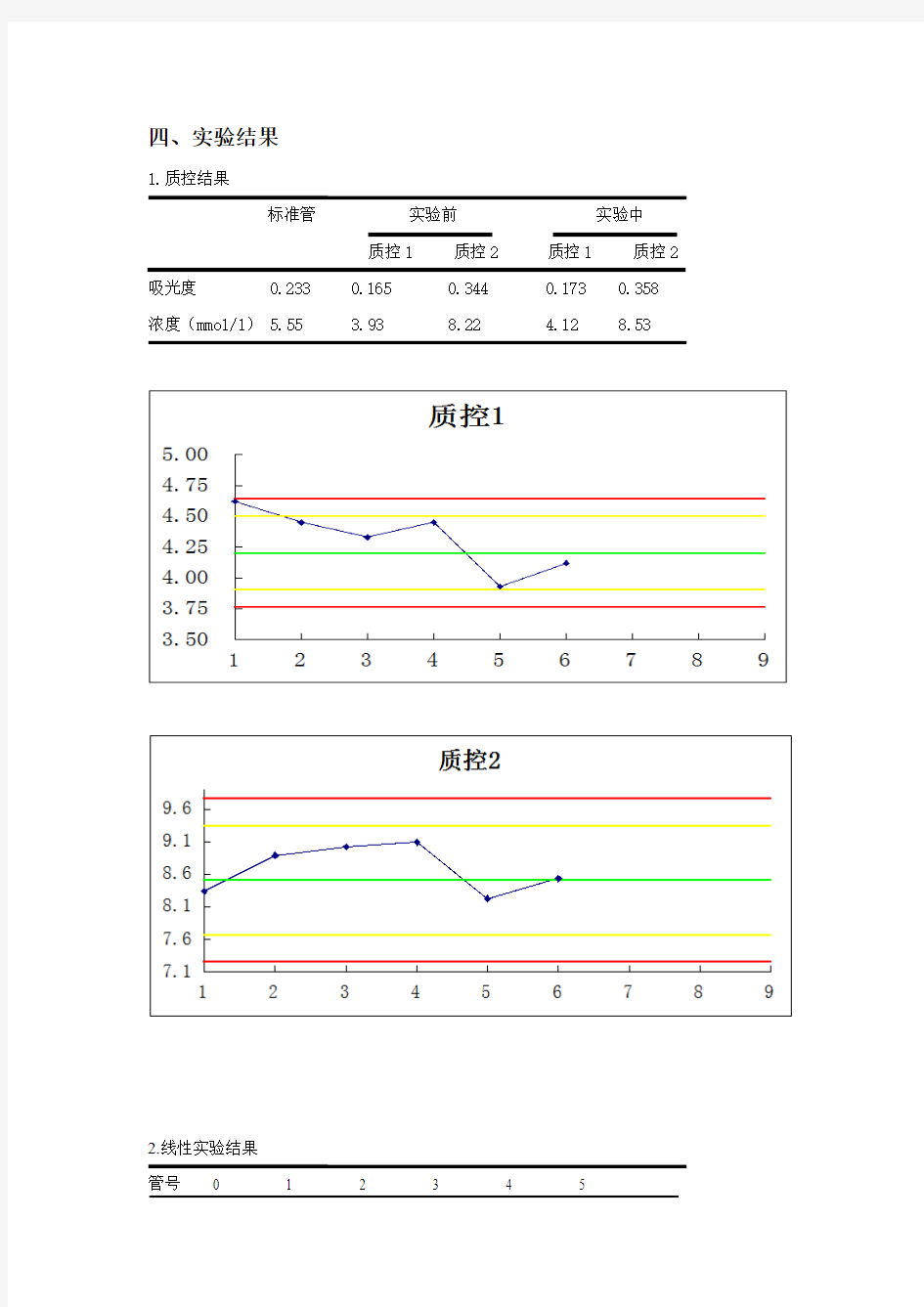
1.质控结果
标准管实验前实验中
质控1 质控2 质控1 质控2 吸光度 0.233 0.165 0.344 0.173 0.358
浓度(mmol/l) 5.55 3.93 8.22 4.12 8.53
2.线性实验结果
管号0 1 2 3 4 5
A1 0 0.205 0.347 0.457 0.588 0.809
A2 0 0.205 0.347 0.458 0.590 0.809
A 0 0.205 0.347 0.458 0.589 0.809 C 0 4.88 8.27 10.91 14.03 19.27
线性评价试验
y = 0.9031x + 0.52860
2468101214161820220246810121416182022
预期浓度
实测浓度
五、结果分析
1.由图可知所有的质控品都在控。
2.线性评价:直线回归方程y = bx+a=0.9031x + 0.5286,a>0,b<0.97,第1、2、5号管实测值与预期值偏差较小,而第3、4号管实测值比预期值小,且偏差较大。
六、实验讨论
1.第3、4号管实测值与预期值小,有较大偏差的可能原因:人为操作因素:加入的40mmol/L 葡萄糖标准溶液量减少或蒸馏水量增加。
2.线性范围变窄的原因:生产中组分投料量不足、生产后组分稳定性差和运输和储存不当等导致试剂组分的含量发生改变可导致线性范围变窄。仪器的稳定性也是重要的影响因素。
七、建议与意见
1.实验前的质控已经做了一支空白对照管,其组分是20ul 蒸馏水和3ml 应用液,与0号管
的组分一样,但在测定其吸光度时两者存在差异(相差0.008),故建议做线性试验时用一开始配的空白管。
2.葡葡糖标准液的加量必须十分准确,应用准确度较高的微量进样器加样。
八、参考文献
1.《临床生物化学实验指导第四版》
实验二 选择结构程序设计 实验报告,DOC
实验二选择结构程序设计 一、实验目的和要求 1.掌握关系表达式和逻辑表达式的使用。 2.熟悉选择结构程序设计。 3.熟练使用if语句进行程序设计。 4.使用switch语句实现多分支选择结构。 二、实验设备 PC机VisualC++6.0 三、实验内容 (一)实验准备 1.从程序流程的角度来看,程序可以分为三种基本结构,即顺序结构、分支(选择)结构、循环结构。 2.If-else语句: 一般形式为:if(表达式) 语句1; else 语句2; 该语句用于实现分支结构,根据表达式的值选择语句1或语句2中的一条执行。首先求解表达式,如果表达式的值为“真”,则执行语句1;如果表达式的值为“假”,则执行语句2. 2.switch语句 switch语句可以处理多分支选择问题,根据其中break语句的使用方法,
一般分为三种情况。 (二)实验项目 1.计算a+|b| #include
线性代数知识点总结汇总
线性代数知识点总结 1 行列式 (一)行列式概念和性质 1、逆序数:所有的逆序的总数 2、行列式定义:不同行不同列元素乘积代数和 3、行列式性质:(用于化简行列式) (1)行列互换(转置),行列式的值不变 (2)两行(列)互换,行列式变号 (3)提公因式:行列式的某一行(列)的所有元素都乘以同一数k,等于用数k 乘此行列式 (4)拆列分配:行列式中如果某一行(列)的元素都是两组数之和,那么这个行列式就等于两个行列式之和。 (5)一行(列)乘k加到另一行(列),行列式的值不变。 (6)两行成比例,行列式的值为0。 (二)重要行列式 4、上(下)三角(主对角线)行列式的值等于主对角线元素的乘积 5、副对角线行列式的值等于副对角线元素的乘积乘 6、Laplace展开式:(A是m阶矩阵,B是n阶矩阵),则 7、n阶(n≥2)范德蒙德行列式
数学归纳法证明 ★8、对角线的元素为a,其余元素为b的行列式的值: (三)按行(列)展开 9、按行展开定理: (1)任一行(列)的各元素与其对应的代数余子式乘积之和等于行列式的值(2)行列式中某一行(列)各个元素与另一行(列)对应元素的代数余子式乘积之和等于0 (四)行列式公式 10、行列式七大公式: (1)|kA|=k n|A| (2)|AB|=|A|·|B| (3)|A T|=|A| (4)|A-1|=|A|-1 (5)|A*|=|A|n-1 (6)若A的特征值λ1、λ2、……λn,则 (7)若A与B相似,则|A|=|B| (五)克莱姆法则 11、克莱姆法则: (1)非齐次线性方程组的系数行列式不为0,那么方程为唯一解
(2)如果非齐次线性方程组无解或有两个不同解,则它的系数行列式必为0 (3)若齐次线性方程组的系数行列式不为0,则齐次线性方程组只有0解;如果方程组有非零解,那么必有D=0。 2 矩阵 (一)矩阵的运算 1、矩阵乘法注意事项: (1)矩阵乘法要求前列后行一致; (2)矩阵乘法不满足交换律;(因式分解的公式对矩阵不适用,但若B=E,O,A-1,A*,f(A)时,可以用交换律) (3)AB=O不能推出A=O或B=O。 2、转置的性质(5条) (1)(A+B)T=A T+B T (2)(kA)T=kA T (3)(AB)T=B T A T (4)|A|T=|A| (5)(A T)T=A (二)矩阵的逆 3、逆的定义: AB=E或BA=E成立,称A可逆,B是A的逆矩阵,记为B=A-1 注:A可逆的充要条件是|A|≠0 4、逆的性质:(5条) (1)(kA)-1=1/k·A-1 (k≠0) (2)(AB)-1=B-1·A-1 (3)|A-1|=|A|-1 (4)(A T)-1=(A-1)T (5)(A-1)-1=A
线性系统理论Matlab实践仿真报告
线性系统理论Matlab实验报告 1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具 有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。 (1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控; 判断能控程序设计如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; Qc=ctrb(A,B) Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 Rc=rank(Qc) Rc =2 Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。 (2)求取状态反馈器中的K,设的期望特征根为-7,-9; 其设计程序如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; P=[-7 -9]; k=place(A,B,P) k = 1.0e+003 * -0.0200 9.0000 0.0072 -0.4500 程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。 2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
线性表实验报告
线性表实验报告 一、实验的目的要求 1、了解线性表的逻辑结构特性,以及这种结构特性在计算机内的两种存储结构。 2、掌握线性表的顺序存储结构的定义及其C语言实现。 3、掌握线性表的链式存储结构——单链表的定义及其C语言实现。 4、掌握线性表在顺序存储结构即顺序表中的各种基本操作。 5、掌握线性表在链式存储结构——单链表中的各种基本操作。 6、认真阅读和掌握实验的程序。 7、上机运行本程序。 8、保存和打印出程序的运行结果,并结合程序进行分析。 二、实验的主要内容 题目:请编制C语言,利用链式存储方式来实现线性表的创建、插入、删除和查找等操作。 具体地说,就是要根据键盘输入的数据建立一个单链表,并输出该单链表;然后根据屏幕 菜单的选择,可以进行数据的插入或删除,并在插入或删除数据后,再输出单链表;最后 在屏幕菜单中选择0,即可结束程序的运行。 三、解题思路分析 在链表中插入数据,不需要进行大量的数据移动,只需要找到插入点即可,可以采用后插入的算法,在插入点的后面添加结点。在链表中删除数据,先找到删除点,然后进行指针赋值操作。 四、程序清单 #include
LNode *L; LNode *creat_L(); void out_L(LNode *L); void insert_L(LNode *L,int i,ElemType e); ElemType delete_L(LNode *L,ElemType e); int locat_L(LNode *L,ElemType e); void main() {int i,k,loc; ElemType e,x; char ch; do{printf("\n"); printf("\n 1.建立单链表"); printf("\n 2.插入元素"); printf("\n 3.删除元素"); printf("\n 4.查找元素"); printf("\n 0.结束程序运行"); printf("\n================================"); printf("\n 请输入您的选择(1,2,3,4,0)"); scanf("%d",&k); switch(k) {case 1:{L=creat_L(); out_L(L); }break; case 2:{printf("\n请输入插入位置:"); scanf("%d",&i); printf("\n请输入要插入元素的值:");
随机化算法实验(Sherwood型线性时间选择)
算法分析与设计实验报告 第八次实验 所需的平均时间为 的可能性。希望获得一个随机化算法 的每一个实例均有。
不输出数组数只输出结果比较:
附录: 完整代码(随机化算法) Sherwood.cpp //随机化算法线性时间选择输入预处理洗牌 #include"RandomNumber.h" #include
template 数学实验报告 学号: , 姓名: , 得分: 实验内容:实验题:交通网络流量分析问题(线性方程组应用) 城市道路网中每条道路、每个交叉路口的车流量调查,是分析、评价及改善城市交通状况的基础。 问题:某城市有下图所示的交通图,每条道路都是单行线,需要调查每条道路每小时的车流量。图中的数字表示该条路段的车流数。如果每个交叉路口进入和离开的车数相等,整个图中进入和离开的车数相等。 求(1)建立确定每条道路流量的线性方程组; (2)分析哪些流量数据是多余的; (3)为了唯一确定未知流量,需要增添哪几条道路的流量统计。 解: (1)由题意得:x1+ x7=400 x1+ x9= x2+300 x2+100=300+ x11 x3+ x7=350+ x8 x4+ x10= x9+ x3 x11+500= x4+ x12 x8+ x5=310 x6+400= x10+ x5 x12+150= x6+290 整理得: x 1+ x 7=400 x 1- x 2+ x 9=300 x 2+ x 11=200 x 3+ x 7- x 8=350 -x 3+x 4+ x 10- x 9=0 -x 4+x 11- x 12=-500 x 5 +x 8=310 - x 5+x 6- x 10=-400 -x 6+ x 12= 140 将方程组写成矩阵向量形式为AX = b 1 0 0 0 0 0 1 0 0 0 0 0 400 x 1 1 -1 0 0 0 0 0 0 1 0 0 0 300 x 2 0 1 0 0 0 0 0 0 0 0 1 0 200 x 3 A= 0 0 1 0 0 0 1 -1 0 0 0 0 b= 350 X= x 4 0 0 -1 1 0 0 0 0 -1 1 0 0 0 x 5 0 0 0 -1 0 0 0 0 0 0 1 -1 -500 x 6 0 0 0 0 1 0 0 1 0 0 0 0 310 x 7 0 0 0 0 -1 1 0 0 0 -1 0 0 -400 x 8 0 0 0 0 0 -1 0 0 0 0 0 1 140 x 9 x 10 x 11 x 12 在MATLAB 环境中,首先输入方程组的系数矩阵A 和方程组右端向量b A=[1,0,0,0,0,0,1,0,0,0,0,0;1,-1,0,0,0,0,0,0,1,0,0,0;0,1,0,0,0,0,0,0,0,0,1,0;0,0,1,0,0,0,1,-1,0,0,0,0;0,0,-1,1,0,0,0,0,-1,1,0,0;0,0,0,-1,0,0,0,0,0,0,1,-1;0,0,0,0,1,0,0,1,0,0,0,0;0,0,0,0,-1,1,0,0,0,-1,0,0;0,0,0,0,-1,0,0,0,0,0,1] b = [400;300;200;350;0;500;310;-400;140] 解得 x 1=- x 9+500 x 2=200 x 3=- x 9+ x 10- x 12 实 验 报 告 课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计 评分 批阅教师签字 一、实验目的 1、 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的 极点对状态的估计误差的影响; 2、 掌握全维状态观测器的设计方法; 3、 掌握带有状态观测器的状态反馈系统设计方法。 二、实验内容 开环系统? ??=+=cx y bu Ax x &,其中 []0100001,0,10061161A b c ????????===????????--???? a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时); 绘制系统的输出阶跃响应曲线。 三、实验环境 MATLAB6、5 四、实验原理(或程序框图)及步骤 利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件就是必须对全部状态变量都能进行测量,但在实际系统中,并不就是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。因此要设法利用已知的信息(输出量y 与输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。该模型就称为状态观测器。若状态观测器的阶次与系统的阶次就是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。 设系统完全可观,则可构造如图4-1所示的状态观测器 图4-1 全维状态观测器 为求出状态观测器的反馈ke 增益,与极点配置类似,也可有两种方法: 方法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出k e ; 方法二:就是可 采用Ackermann 公式: []T o e Q A k 1000)(1Λ-Φ=,其中O Q 为可观性矩阵。 利用对偶原理,可使设计问题大为简化。首先构造对偶系统 ???=+=ξ ηξξT T T b v c A & 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可 实验报告:线性表的基本操作 实验1:实现顺序表各种基本运算的算法 一、实验目的 学会并运用顺序表存储结构及各种运算。 二、实验环境 VC++6.0 三、实验准备 (1) 复习课件中理论知识 (2)练习课堂所讲的例子 四、实验内容 编写一个程序实现SqList.cpp,实现顺序表基本运算,并在此基础上设计个主程序exp1.cpp,完成如下功能: (1)初始化顺序表L; (2)依次插入a、b、c、d、e元素; (3)输出顺序表L; (4)输出顺序表L长度; (5)判断顺序表L是否为空: (6)输出顺序表L的第3个元素; (7)输出元素a的位置; (8)在第4个位置上插入f元素; (9)输出顺序表L; (10)删除顺序表L的第3 个元素; (11)输出顺序表L; (12)顺序表L; 五、实验步骤 1、构造一个空的线形表并分配内存空间 Status InitList_Sql(SqList &L) {L.elem=(ElemType*)malloc(LIST_INIT_SIZE*sizeof(ElemType)); if(!L.elem) exit(OVERFLOW); L.length=0; L.listsize=LIST_INIT_SIZE; return OK; } 2、求线性表的长度 Status ListLength(SqList L) { return L.length; } 3、线性表清空 void ClearList(SqList &L){ L.length = 0; } 4、在顺序线形表 L 中第 i 个位置之前插入新的元素 e Status ListInsert_Sq(SqList &L,int i,ElemType e) 福州大学数学与计算机科学学院 《计算机算法设计与分析》上机实验报告(1) 图中箭头指向表示大的数值指向小的数值,所以根据图 可以看出,在x的右边,每一个包含5个元素的组中至少有3 个元素大于x,在x的左边,每一组中至少有3个元素小于x (保证x分割一边必定有元素存在)。 图中显示的中位数的中位数x的位置,每次选取x作为划 分的好处是能够保证必定有一部分在x的一边。所以算法最坏 情况的递归公式可以写成: ,使用替换法可以得出) (。 n cn T 4、算法代码: #include int a[2000]; int b[2000]; for(int i=0; i<2000; i++) { a[i]=b[i]=rand()%10000; cout< 实验一 误差分析 实验(病态问题) 实验目的:算法有“优”与“劣”之分,问题也有“好”与“坏”之别。对数值方法的研究而言,所谓坏问题就是问题本身对扰动敏感者,反之属于好问题。通过本实验可获得一个初步体会。 数值分析的大部分研究课题中,如线性代数方程组、矩阵特征值问题、非线性方程及方程组等都存在病态的问题。病态问题要通过研究和构造特殊的算法来解决,当然一般要付出一些代价(如耗用更多的机器时间、占用更多的存储空间等)。 问题提出:考虑一个高次的代数多项式 )1.1() ()20()2)(1()(20 1∏=-=---=k k x x x x x p Λ 显然该多项式的全部根为1,2,…,20共计20个,且每个根都是单重的。现考虑该多项式的一个扰动 )2.1(0 )(19=+x x p ε 其中ε是一个非常小的数。这相当于是对()中19x 的系数作一个小的扰动。我们希望比较()和()根的差别,从而分析方程()的解对扰动的敏感性。 实验内容:为了实现方便,我们先介绍两个Matlab 函数:“roots ”和“poly ”。 roots(a)u = 其中若变量a 存储n+1维的向量,则该函数的输出u 为一个n 维的向量。设a 的元素依次为121,,,+n a a a Λ,则输出u 的各分量是多项式方程 01121=+++++-n n n n a x a x a x a Λ 的全部根;而函数 poly(v)b = 的输出b 是一个n+1维变量,它是以n 维变量v 的各分量为根的多项式的系数。可见“roots ”和“poly ”是两个互逆的运算函数。 ;000000001.0=ess );21,1(zeros ve = ;)2(ess ve = ))20:1((ve poly roots + . I 线性系统实验报告 : 院系:航天学院 学号: . . 2015年12月 1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系应用经典力学理论建立系统的动 力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析容主要包括得出原未加控制器时系统的极点分布,系统的能观性,能控性。 3)LQR控制器设计与调节实验 利用线性二次型最优(LQR)调节器MATLAB仿真设计的参数结果对平面二阶倒立摆进行实际控制实验,参数微调得到较好的控制效果,记录实验曲线。 4)改变控制对象的模型参数实验 调整摆杆位置,将摆杆1朝下,摆杆2朝上修改模型参数、起摆条件和控制参数,重复3的容。 3.实验步骤 实验报告 课程名称____数据结构上机实验__________ 实验项目______线性表的应用____________实验仪器________PC机___________________ 系别_____电子信息与通信学院___ 专业________ ___ 班级/学号______ __ 学生姓名______ ___________ 实验日期_______________________ 成绩_______________________ 指导教师_______________________ 实验一.线性表的应用 1.实验目的:掌握线性链表的存储、运算及应用。利用链 表实现一元多项式计算。 2.实验内容: 1)编写函数,实现用链表结构建立多项式; 2)编写函数,实现多项式的加法运算; 3)编写函数,实现多项式的显示; 4)测试:编写主函数,它定义并建立两个多项式,显示 两个多项式,然后将它们相加并显示结果。变换测试用的多项式,检查程序的执行结果。 选做内容:修改程序,选择实现以下功能: 5)多项式求值:编写一个函数,根据给定的x值计算并 返回多项式f(x)的值。测试该函数(从终端输入一个x的值,调用该函数并显示返回结果)。 6)多项式相减:编写一个函数,求两个多项式相减的多 项式。 7)多项式相乘:编写一个函数,求两个多项式的乘积多 项式。 3.算法说明: 1)多项式的建立、显示和相加算法见讲义。可修改显示 函数,使输出的多项式更符合表达规范。 2)多项式减法:同次项的系数相减(缺项的系数是0)。 例如a(x)=-5x2+2x+3,b(x)= -4x3+3x,则a(x)-b(x) =4x3-5x2-x+3。提示:a(x)-b(x) = a(x)+(-b(x))。 3)多项式乘法:两个多项式的相乘是“系数相乘,指数 相加”。算法思想是用一个多项式中的各项分别与另 一个多项式相乘,形成多个多项式,再将它们累加在 一起。例如,a(x)=-5x2+2x+3,b(x)=-4x3+3x,则 a(x)*b(x) = (-4x3)*(-5x2+2x+3)+(3x)*(-5x2+2x+3) = (20x5-8x4-12x3) + (-15x3+6x2+9x) = 20x5-8x4-27x3+6x2+9x。 4.实验步骤: 根据实验报告的要求,我对文件夹里的C文件进行了丰 富和修改,步骤如下: 链表结构建立多项式: typedef struct polynode { float coef; //系数 int exp; //指数 struct polynode *next; //下一结点指针 } PNode; 编写函数,实现多项式的加法运算; PNode * PolyAdd (PNode *f1, PNode *f2) //实现加法功能。 一.实验名称 1.线性表基本操作; 2.处理约瑟夫环问题 二.试验目的: 1.熟悉C语言的上机环境,掌握C语言的基本结构。 2.定义单链表的结点类型。 3.熟悉对单链表的一些基本操作和具体的函数定义。 4.通过单链表的定义掌握线性表的链式存储结构的特点。 5.熟悉对单链表的一些其它操作。 三.实验内容 1.编制一个演示单链表初始化、建立、遍历、求长度、查询、插入、删除等操作的程序。 2.编制一个能求解除约瑟夫环问题答案的程序。 实验一线性表表的基本操作问题描述: 1. 实现单链表的定义和基本操作。该程序包括单链表结构类型以及对单链表操作 的具体的函数定义 程序中的单链表(带头结点)结点为结构类型,结点值为整型。 /* 定义DataType为int类型*/ typedef int DataType; /* 单链表的结点类型*/ typedef struct LNode {DataType data; struct LNode *next; }LNode,*LinkedList; LinkedList LinkedListInit() //初始化单链表 void LinkedListClear(LinkedList L) //清空单链表 int LinkedListEmpty(LinkedList L)//检查单链表是否为空 void LinkedListTraverse(LinkedList L)//遍历单链表 int LinkedListLength(LinkedList L)//求单链表的长度 /* 从单链表表中查找元素*/ LinkedList LinkedListGet(LinkedList L,int i) /* 从单链表表中查找与给定元素值相同的元素在链表中的位置*/ int LinkedListLocate(LinkedList L, DataType x) void LinkedListInsert(LinkedList L,int i,DataType x) //向单链表中插入元素 /* 从单链表中删除元素*/ void LinkedListDel(LinkedList L,DataType x) 算法分析与设计实验报告 第8次实验 附录:完整代码 #include const unsigned long adder=12345L; class RandomNumber{ private: //当前种子 unsigned long randSeed; public: RandomNumber (unsigned long s=0); //构造函数,默认值0表示由系统自动产生种子 unsigned short Random(unsigned long n); //产生0:n-1之间的随机整数 double fRandom(void); //产生[0,1)之间的随机实数 }; RandomNumber::RandomNumber(unsigned long s){ if(s==0) randSeed=time(0); else randSeed=s; } unsigned short RandomNumber::Random(unsigned long n){ randSeed=multiplier*randSeed+adder; return(unsigned short)((randSeed>16)%n); } double RandomNumber::fRandom(void){ return Random(maxshort)/double(maxshort); } template 数值线性代数第二版徐树方高立张平文上机习题第三章实验报告 第三章上机习题 用 你所熟悉的的计算机语言编制利用QR 分解 求解线性方程组和线性最小二乘问题的通用子程序,并用你编制的子程序完成下面的计算任务: (1)求解第一章上机习题中的三个线性方程组,并将所得的计算结果与前面的结果相比较,说明各方法的优劣; (2)求一个二次多项式+bt+c y=at 2 ,使得在残向量 的2范数下最小的意义下拟合表3.2中的数据; (3)在房产估价的线性模型 11 1122110x a x a x a x y ++++= 中,11 2 1 ,,,a a a 分别表示税、浴室数目、占地面积、车库数目、房屋数目、居室数目、房龄、建筑类型、户型及壁炉数目,y 代表房屋价格。现根据表3.3和表3.4给出的28组数据,求出模型中参数的最小二乘结果。 (表3.3和表3.4见课本P99-100) 解 分析: (1)计算一个Householder 变换H : 由于T T vv I ww I H β-=-=2,则计算一个Householder 变换H 等价于计算相应的 v 、β。其中 ) /(2,||||12v v e x x v T =-=β。 在实际计算中, 为避免出现两个相近的数出现的情形,当0 1 >x 时, 令 2 12 221||||)(-x x x x v n +++= ; 为便于储存,将v 规格化为1 /v v v =,相应的,β变为)/(22 1 v v v T =β 为防止溢出现象,用∞ ||||/x x 代替 (2)QR 分解: 利用Householder 变换逐步将n m A n m ≥?,转化为上三 角矩阵A H H H n n 11 -=Λ,则有 实验报告 课程线性系统理论基础实验日期年月日 专业班级姓名学号同组人 实验名称系统的能控性、能观测性、稳定性分析及实现评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌握如何使用MATLAB进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a)了解以下命令的功能;自选对象模型,进行运算,并写出结 果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性; (c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性 数值分析实验报告总结 随着电子计算机的普及与发展,科学计算已成为现代科 学的重要组成部分,因而数值计算方法的内容也愈来愈广泛和丰富。通过本学期的学习,主要掌握了一些数值方法的基本原理、具体算法,并通过编程在计算机上来实现这些算法。 算法算法是指由基本算术运算及运算顺序的规定构成的完 整的解题步骤。算法可以使用框图、算法语言、数学语言、自然语言来进行描述。具有的特征:正确性、有穷性、适用范围广、运算工作量少、使用资源少、逻辑结构简单、便于实现、计算结果可靠。 误差 计算机的计算结果通常是近似的,因此算法必有误差, 并且应能估计误差。误差是指近似值与真正值之差。绝对误差是指近似值与真正值之差或差的绝对值;相对误差:是指近似值与真正值之比或比的绝对值。误差来源见表 第三章泛函分析泛函分析概要 泛函分析是研究“函数的函数”、函数空间和它们之间 变换的一门较新的数学分支,隶属分析数学。它以各种学科 如果 a 是相容范数,且任何满足 为具体背景,在集合的基础上,把客观世界中的研究对象抽 范数 范数,是具有“长度”概念的函数。在线性代数、泛函 分析及相关的数学领域,泛函是一个函数,其为矢量空间内 的所有矢量赋予非零的正长度或大小。这里以 Cn 空间为例, Rn 空间类似。最常用的范数就是 P-范数。那么 当P 取1, 2 ,s 的时候分别是以下几种最简单的情形: 其中2-范数就是通常意义下的距离。 对于这些范数有以下不等式: 1 < n1/2 另外,若p 和q 是赫德尔共轭指标,即 1/p+1/q=1 么有赫德尔不等式: II = ||xH*y| 当p=q=2时就是柯西-许瓦兹不等式 般来讲矩阵范数除了正定性,齐次性和三角不等式之 矩阵范数通常也称为相容范数。 象为元素和空间。女口:距离空间,赋范线性空间, 内积空间。 1-范数: 1= x1 + x2 +?+ xn 2-范数: x 2=1/2 8 -范数: 8 =max oo ,那 外,还规定其必须满足相容性: 所以 实 验 报 告 课程 线性系统理论基础 实验日期 年 月 日 专业班级 学号 同组人 实验名称 系统的能控性、能观测性、稳定性分析及实现 评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌 握如何使用MATLAB 进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a )了解以下命令的功能;自选对象模型,进行运算,并写出结 果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,18 2710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性; (c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性 已知两个单位负反馈系统的开环传递函数分别为 s s s s G s s s s G 457.2)(,457.2)(232231-+=++= 用Bode 图法判断系统闭环的稳定性。 (d )判断下列系统是否状态渐近稳定、是否BIBO 稳定。 []x y u x x 0525,100050250100010-=????? ?????+??????????-= 数据结构实验报告全集 实验一线性表基本操作和简单程序 1.实验目的 (1)掌握使用Visual C++ 上机调试程序的基本方法; (2)掌握线性表的基本操作:初始化、插入、删除、取数据元素等运算在顺序存储结构和链表存储结构上的程序设计方法。 2.实验要求 (1)认真阅读和掌握和本实验相关的教材内容。 (2)认真阅读和掌握本章相关内容的程序。 (3)上机运行程序。 (4)保存和打印出程序的运行结果,并结合程序进行分析。 (5)按照你对线性表的操作需要,重新改写主程序并运行,打印出文件清单和运行结果 实验代码: 1)头文件模块 #include >验目的 掌握顺序栈的基本操作:初始化栈、判栈空否、入栈、出栈、取栈顶数据元素等运算以及程序实现方法。 2.实验要求 (1)认真阅读和掌握和本实验相关的教材内容。 (2)分析问题的要求,编写和调试完成程序。 (3)保存和打印出程序的运行结果,并分析程序的运行结果。 3.实验内容 利用栈的基本操作实现一个判断算术表达式中包含圆括号、方括号是否正确配对的程序。具体完成如下: (1)定义栈的顺序存取结构。 (2)分别定义顺序栈的基本操作(初始化栈、判栈空否、入栈、出栈等)。 (3)定义一个函数用来判断算术表达式中包含圆括号、方括号是否正确配对。其中,括号配对共有四种情况:左右括号配对次序不正确;右括号多于左括号;左括号多于右括号;左右括号匹配正确。 (4)设计一个测试主函数进行测试。 (5)对程序的运行结果进行分析。 实验代码: #include < > #define MaxSize 100 typedef struct { int data[MaxSize]; int top; }SqStack; 东南大学自动化学院 实 验 报 告 课程名称: 自动控制基础 实验名称: 状态观测器的设计 院 (系): 自动化学院 专 业: 自动化 姓 名: 吴静 学 号: 08008419 实 验 室: 机械动力楼417室 实验组别: 同组人员: 实验时间:2011年05月13日 评定成绩: 审阅教师: 一、实验目的 1. 理解观测器在自动控制设计中的作用 2. 理解观测器的极点设置 3. 会设计实用的状态观测器 二、实验原理 如果控制系统采用极点配置的方法来设计,就必须要得到系统的各个状态,然后才能用状态反馈进行极点配置。然而,大多数被控系统的实际状态是不能直接得到的,尽管系统是可以控制的。怎么办?如果能搭试一种装置将原系统的各个状态较准确地取出来,就可以实现系统极点任意配置。于是提出了利用被控系统的输入量和输出量重构原系统的状态,并用反馈来消除原系统和重构系统状态的误差,这样原系统的状态就能被等价取出,从而进行状态反馈,达到极点配置改善系统的目的,这个重构的系统就叫状态观测器。 另外,状态观测器可以用来监测被控系统的各个参量。 观测器的设计线路不是唯一的,本实验采用较实用的设计。 给一个被控二阶系统,其开环传递函数是G (s )=12 (1)(1)K T s T s ++ ,12 K K K =观测器如图示。 设被控系统状态方程 构造开环观测器,X ∧ Y ∧ 为状态向量和输出向量估值 由于初态不同,估值X ∧ 状态不能替代被控系统状态X ,为了使两者初态跟随,采用输出误差反馈调节,加入反馈量H(Y-Y)∧ ,即构造闭环观测器,闭环观测器对重构造的参数误差也有收敛作用。 也可写成 X =(A-HC)X +Bu+HY Y CX ? ∧ ∧ ∧∧ = 只要(A-HC )的特征根具有负实部,状态向量误差就按指数规律衰减,且极点可任意配置,一般地,(A-HC )的收敛速度要比被控系统的响应速度要快。工程上,取小于被控系统最小时间的3至5倍,若响应太快,H 就要很大,容易产生噪声干扰。 实验采用X =A X +Bu+H(Y-Y)? ∧ ∧∧ 结构,即输出误差反馈,而不是输出反馈形式。 取:1212min 35 20,5,2,0.5,0.2K K T T t λ-= =====,求解12g g ?????? 三、实验设备: THBDC-1实验平台 THBDC-1虚拟示波器 Matlab/Simulink 软件 四、实验步骤 按要求设计状态观测器 (一) 在Matlab 环境下实现对象的实时控制 1. 将ZhuangTai_model.mdl 复制到E:\MATLAB6p5\work 子目录下,运行matlab ,打开ZhuangTai_model.mdl 注:‘实际对象’模块对应外部的实际被控对象,在simulink 下它代表计算机与外部接口: ● DA1对应实验面板上的DA1,代表对象输出,输出通过数据卡传送给计算机; ● AD1对应实验面板上的AD1,代表控制信号,计算机通过数据卡将控制信号送给实际对象;线性代数实验题04-交通网络的流量分析
全维状态观测器的设计
数据结构实验报告——线性表
线性时间选择算法
数值分析实验报告
二阶倒立摆实验报告
数据结构线性表的应用实验报告
线性表实验报告
舍伍德线性时间选择
数值线性代数第二版徐树方高立张平文上机习题第三章实验报告
系统的能控性,能观测性,稳定性分析
数值分析实验报告总结
系统的能控性、能观测性、稳定性分析
数据结构实验报告全集
状态观测器的设计——报告