第六章:点的运动学
第六章
点的运动学
一、要求
1、能用矢量法建立点的运动方程,求速度和加速度。
2、能熟练地应用直角坐标法建立点的运动方程,求轨迹、速度和加速度。
3、能熟练地应用自然法求点在平面上作曲线运动时的运动方程、速度和加速度,并正确
理解切向加速度和法向加速度的物理意义。
二、重点、难点
点的曲线运动的直角坐标法,点的运动方程,点的速度和加速度在直角坐标轴上的投影。点的曲线运动的自然法(以在平面内运动为主),点沿已知轨迹的运动方程,点的切向加速度与法向加速度。
三、学习指导
点的运动学是整个运动学的基础。三种方法描述同一点的运动,其结果是一样的。如果将矢量法中的矢量r 、v 、a 用解析式表示,就是坐标法;矢量v 、a 在自然轴投影,就得出自然法中的速度与加速度。
直角坐标系与自然轴系都是三轴相互垂直的坐标系。直角坐标系是固定在参考系上,可用来确定每一瞬时动点的位置。点沿空间曲线运动有三个运动方程,点沿平面曲线运动有两个运动方程,点沿直线运动有一个运动方程。自然轴系是随动点一起运动的直角轴系(切向轴τ、法向轴n 及副法向轴b ),因此不能用自然轴系确定动点的位置。自然法以已知轨迹为前提,用弧坐标来建立点的运动方程,以确定动点每一瞬时在轨迹上的位置。
用直角坐标法求速度和加速度是将三个坐标分别对时间取一次和二次导数,得到速
度和加速度在三轴上的投影,然后再求它的大小和方向。用自然法求速度,则将坐标对时间取一次导数,就得到速度的大小和方向。自然法中的加速度物理概念清楚,τa 和n a 分别反映了速度大小和速度方向改变的快慢程度。需注意的是不能将dt
dv 误认为是动点的全加速
度。只有当0=n a 时,才有dt
dv a =
。学员可自行分析,这时点作什么运动。
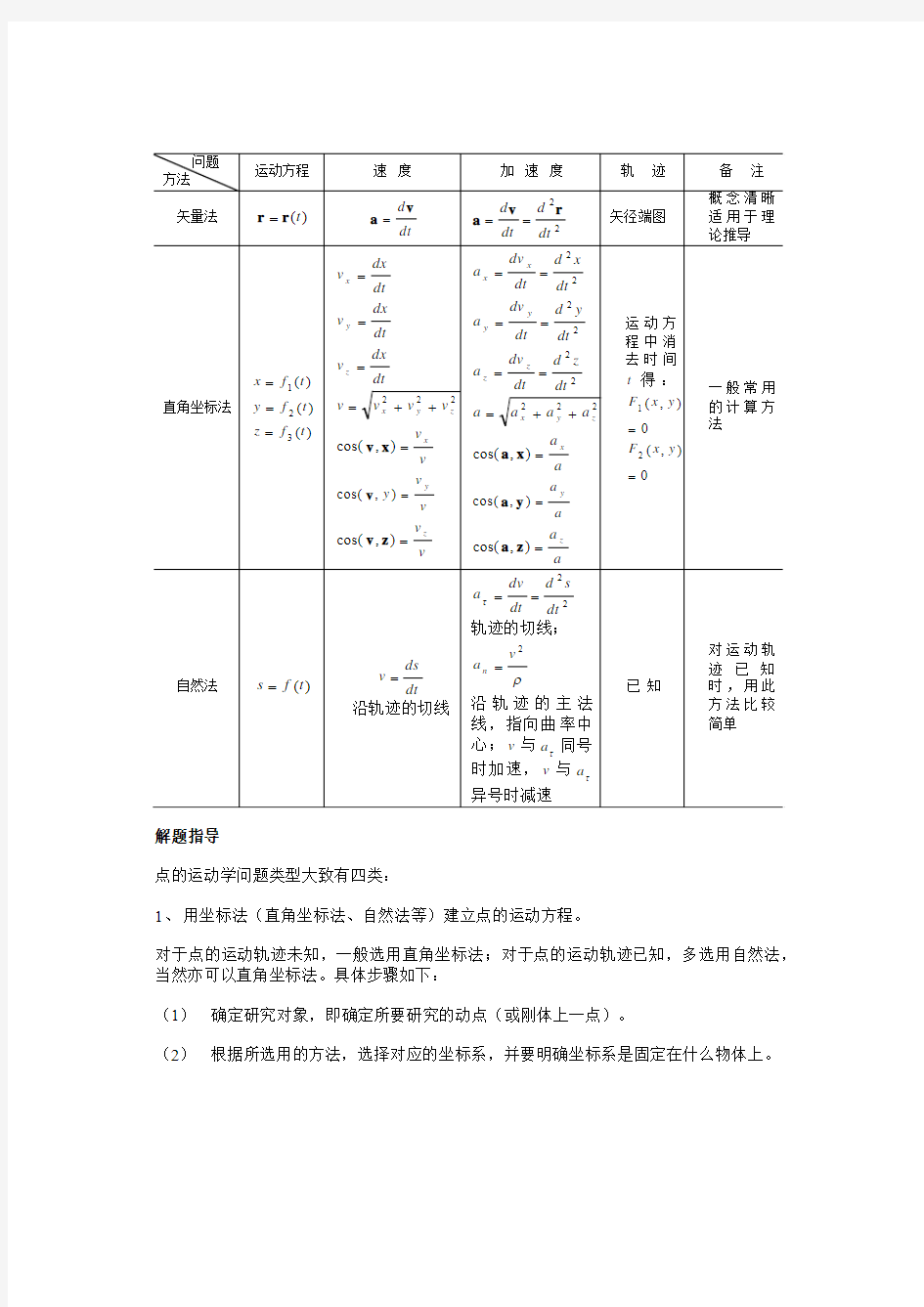
下面对矢量法、直角坐标法与自然法作一总结和比较:
解题指导
点的运动学问题类型大致有四类:
1、用坐标法(直角坐标法、自然法等)建立点的运动方程。
对于点的运动轨迹未知,一般选用直角坐标法;对于点的运动轨迹已知,多选用自然法,当然亦可以直角坐标法。具体步骤如下:
(1)确定研究对象,即确定所要研究的动点(或刚体上一点)。
(2)根据所选用的方法,选择对应的坐标系,并要明确坐标系是固定在什么物体上。
(3) 确定点运动的开始位置,然后将动点放在任意位置,用某一参量表示点的位置。所
选参量应与时间有关。不能将点放在特殊位置(如初、末位置),因为特定时刻的位置不能代表点的位置随时间变化的函数关系。 (4) 代入时间t 找出坐标与时间t 的函数关系,就得到动点在空间的几何位置随时间t 的
变化关系,亦即动点相对于坐标的运动规律——运动方程。。 2、求点的轨迹方程
先要知道直角坐标表示的点的运动方程(包括题给或自行建立),将方程中的时间t 消去,得到动点的空间坐标之间的函数关系,就是动点的轨迹方程。但要注意点的运动轨迹是当t 由0到∞或到指定的时间T 之间,点所经过的路径,它仅是按照数学表达式所画出的曲线上的一部分线段。
3、求点的速度、加速度以及曲率半径
知道运动方程后,根据已知量和需求量,可用数学求导方法,矢量合成法则以及法向加速度公式ρ
2
v
a n =
,来求得动点的速度、切向加速度、法向加速度以及全加速度。
对于求点在轨迹上某处的曲率半径,要联合应用直角坐标法与自然法。
注意在求某一特定瞬时(s t )的动点的速度(s v )或加速度(n a )时,千万不要用某瞬时的特定坐标值或速度瞬时值对时间求导数,求导后总为零。为了求特定时刻的速度与加速度,应该将运动规律和速度规律对时间求导数得出v 和a 是t 的函数关系,再代入特定的时间(s t ),就可以求得s v 和s a 的大小。另外,在求导数时,还要注意数学中的复合函数求导。
4、已知点的加速度或速度,求运动方程
对于已给出动点的加速度或速度方程(包括自行建立的),应用所给定的初始条件,采取数学积分的方法,就可以得到点的运动方程,应该注意,对于不同的初始条件,将得
四、典型例题解析
例题6.1 (填空题)变矢量对自变量的导数是一个( ),方向沿着( )对应点的切线。变矢量的矢导数在任一固定轴上的投影,等于这个矢量( )的导数。
解:新的矢量,矢端图,在该轴上的投影。
例题6. 2 已知动点的运动方程为tm x 50=,m t y 25500-=,求(1)动点的运动轨迹;(2)当0=t 时,动点的切向、法向加速度和轨迹的曲率半径。 解:(1)求动点的运动轨迹
由运动方程中消去时间t ,即得到动点的轨迹方程为
y x
5002500002
-=
可知动点的轨迹为一抛物线。再作进一步分析:根据题意0=t 时,m y x 500,0==,即开
始运动时,动点在抛物线上的点)500,0(A 处。以后,当从零增加
而y 的值减小,从而知动点仅在如图(2.1)中实线所示的半抛物线上运动。所以,该动点的轨迹应为半抛物线
y x 5002500002
-= )0(≥x
(2)求0=t 时,动点的切向、法向加速度和轨迹的曲率半径 由题中所给动点的运动方程求导得:
50.
==x v x ;t y v y 10-==?
(1)
故动点的速度为
(2)
又由式(1)对时间求导得
0==?
x x v a ;10-==?
y y v a
故动点的加速度
2
22/10s m a a a y x =+=
而动点的切向加速度为
2
2510t
t v a +==?
τ (3)
所以动点的法向加速度为
2
2
2
2550t
a a
a n +=
-=
τ (4)
轨迹的曲率半径为
23
2
2
)25(2t a v
n
+==
ρ (5)
将0=t
代入式(3)、(4),求此时动点的切向、法向加速度及曲率半径分别为
=τa , 2/10s m a n =, m
250=ρ
讨论:
(1)求动点的运动轨迹,由运动方程消去时间t 后,应注意再做进一步地分析,以得出轨迹的确切结论。(2)本题有助于读者熟悉直角坐标法表示的动点运动方程、轨迹、速度、加速度之间的关系;熟悉切向加速度、法向加速度、速度、曲率半径之间的关系。
例题6. 3 长方体以等角速度s rad /44.3=ω绕轴AC 转动,转向如图2.3所示,试求点B 的速度与加速度。
解:作AC 的垂线BD ,则有
s mm BD v B /140=?=ω, 2
2
/73.481s mm BD a n
B =?=ω
(本题也可采用直角坐标法求解,学员不妨试试)
s
m t v v v y x /2510
2
2
2
+=+=
图
题2.6
例题6. 4 火箭在B 点处铅直发射,如图2.4所示,kt
=θ
,求火箭的运动方程,以及在
6
π
θ=
,
3
π
时,火箭的速度和加速度。
解:火箭的运动方程为:l
x
=,kt
l y
tan =,速度和加速度为 kt lk dt dy v 2
sec
==
,kt
kt lk dt
y d a tan sec 22
2
2
2
==
当6
π
θ==kt 时,lk
v 3
4=,2
9
38lk
a
=
当3
π
θ=
=kt 时,lk
v
4=,238lk a =
例题6. 5 自行车B 沿近似用抛物线方程2Cx y =(其中)01.01-=m C 描述的轨道向下运动,如图2.5所示,当至点A (m x A 20=,m y A 4=)时,s m v B /8=,
2
/4s
m dt
dv B =,试求该瞬时
B
的加速度大小。假设可将车-人系统看成点。
解:由抛物线方程2Cx y =可求得当至点A
m
y
y 47.62)1''23
2
'=+=(ρ
,由s m v B /8=,
2
/4s
m dt
dv a B B ==
τ
,2
2/0245.1s
m v a B
n
B
==
ρ
由2
22/13.4)
()(s m a a a n B B =+=τ
例题6. 6 小环M 同时套在细杆OA 和半径为r 的固定大圆圈上,如图2.6所示,细杆OA 绕大圆圈上的固定点O 转动,它与水平直径的夹角t ω?=,其中ω为常数。试求小环M 的运动方程,以及它的速度和加速度。
解:采用弧坐标法求解,取小环初瞬时的位置0M 为弧坐标s 的原点,小环M 的运动方向为弧坐标s 的正向,则小环M 的弧坐标为
x
z
图
题3.6图题5.6图题4.6O
t r r M M s ω?220=?== (1)
此即小环M 弧坐标形式的运动方程。 小环M 的速度大小为
ωr s v 2==?
(2)
其方向沿轨迹切向并指向运动前进一方。由上式可知v 为常数,这表明M 沿大圆圈做匀速圆周运动。小环M 的切向与发向加速度分别为
0==?
v a τ;2
2
4ω
r r
v
a n ==
(3)
故小环M 的加速度大小为
2
2
2
4ωτr a a a a n n ==+=
(4)
其方向沿1MO 而指向圆心1O
讨论:
(1)本题也可采用直角坐标法求解,取如图(2)所示固定直角坐标系Oxy ,则小环M 的直角坐标为 (5)
将t
ω?
=代入上式,即得小环M 在直角坐标系中的运动方程为
(6)
上式对时间求一阶导数得
(7)
所以,小环M 的速度大小和坐标轴夹角的方向余弦分别为
(8)
再将(7)式对时间求一阶导数得
(9)
故小环M 的加速度大小和方向余弦分别为
???2cos cos 2cos 2
r r r OM x +==?=?
???2sin cos sin 2sin r r OM y ==?=t
r v a x x ωω2cos 42
-==?
t r v a y y ωω2sin 42
-==?
ω
r v v v y x 22
2
=+=
?
ω2sin 2sin ),cos(-=-==
t v
v x v x ?ω2cos 2cos ),cos(===t v
v y v y
t
r x v x ωω2sin 2-==?
t r y v y ωω2cos 2-==?
)
2cos 1(t r x ω+=t
r y ω2sin =
(10)
(2)本题也可采用极坐标法求解,以O 点为极点,x 轴为极轴,则小环M 的极坐标形式的运动方程为:
t r r OM ω?ρcos 2cos 2=== (11)(a)
t ω?= (11)(b)
所以小环M 的径向和横向速度分别为
t r dt
d v ωωρρsin 2-==
(12)(a) t r dt
d v ωω?ρ
ρcos 2== (12)(b)
故小环M 的速度大小和方向分别为:
ω?ρr v v v 22
2
=+=
?ρρ
?ctg v v v tg -==
),(
即角0090),(?ρ+=∠v ,又由(11)式可得小环M 的径向与横向加速度分别为
t r dt
d dt
d a ωω
?ρρρcos 4)
(2
2
22
-=-=
(13)(a)
t r dt
d dt d dt
d a ωω?ρ?ρ
?sin 42
2
22-=?+= (13)(b)
故小环M 的加速度大小和方向分别为
2
2
2
4ω?ρr a a a =+=
?ρρ
?tg a a a tg ==
),(;00
180
),(?ρ+=∠a
(3)比较以上三种解法可见,在动点运动轨迹已知的情况下,利用弧坐标法求解不仅方便,而且速度、加速度的方向容易确定。如果点的运动轨迹未知,则一般选用直角坐标法求解。
2
224ω
r a a a y x =+=
t
a a x a x ω2cos ),cos(-==
t
a a y a y ω2sin ),cos(-==
运动学基础》题库-无答案(14.5)
2013-2014学年第二学期期末考试 《运动学基础》题库 一、单选题(每小题1分,共30题) 第一章运动学绪论 1 人体运动学的研究对象主要是 A 运动动作 B 运动行为 C 运动治疗方法 D 运动动作与运动行为 2 人体运动学的研究方法有 A 描述与分析 B 动物实验 C 建立抽象的数学模型 D 以上都是 3 运动学研究内容中不正确的是 A 关节运动与骨骼肌运动力学原理 B 运动中能量的供应方式 C 物理治疗 D 运动动作分析 4 学习运动学课程要用唯物辩证的观点去认识()的关系 A 人体与环境 B 结构与功能 C 局部与整体D以上都是 5 下蹲过程中下肢处于封闭运动链,因有 A 髋、膝与踝关节同时运动 B 仅髋关节活动 C 仅膝关节活动 D 仅踝关节活动 6 写字时,上肢运动链处于开放运动链 A 仅有肩关节活动 B 仅有肘关节活动 C 仅有腕关节活动 D 有前臂与腕关节活动 7 环节是指人体身上 A 活动的每个关节 B 相对活动的肢体 C 相对活动的节段 D 相对活动的关节 8 打羽毛球时手臂挥拍向下扣球的动作属于 A 推 B 拉 C 鞭打 D 蹬伸 9 举重动作属于 A 推 B 拉 C 鞭打 D 缓冲 10 腾空起跳落下时的屈膝与屈髋动作属于 A 推 B 拉 C 鞭打 D 缓冲 11 骑自行车,腿的动作有 A 推 B 拉 C 鞭打D蹬伸 12 步行时,伴随骨盆和肢体的转运的运动形式为 A摆动 B 扭转C缓冲D蹬伸 13 仰卧位时,上下肢互相靠拢的运动形式为 A 扭转 B 摆动 C 相向运动 D 鞭打 14 无氧运动是指()运动 A 小强度 B 中等强度 C 大强度D极量强度15 关于有氧运动错误的是 A 运动时间较长 B 中、小强度 C 一般健身锻炼D极量强度 16 动力性运动错误的是 A 产生加速度 B 产生位移 C 抗阻力 D 维持躯体姿势 17 运动动作可以 A 消除肢体肿胀 B 使肌力下降 C 增加关节周围组织粘连 D 使韧带挛缩 18 主动运动是指肌力达()时,即可由骨骼肌主动收缩完成肢体的运动 A 1级 B 2级 C 3级 D 4级 19 相当于本人最大吸氧量55%-65%的运动强度是 A 极量强度 B 亚极量强度 C 中等强度 D 小强度 20 打太极拳,其运动强度属于 A 极量强度 B 亚极量强度 C 中等强度 D 小强度 第二章运动学基础 1 人体运动状态改变的原因是 A 力 B 力矩 C 力和(或)力矩 D 速度 2 骨骼肌张力相对于人体环节而言是 A 均为内力 B 内力和外力 C 外力和内力 D 均为外力 3 人体整体的主动运动的必要条件是 A 摩擦力 B 重力 C 肌力 D 支撑反作用力 4 运动物体的质量和速度的乘积称为 A 动量 B 冲量 C 动能 D 势能 5 人体缓冲动作可以 A 增大冲击力 B 减小冲击力 C 减少重力 D 增大重力 6 物体的惯性与下面哪个物理量有关 A 长度 B 重量 C 速度 D 质量 7 人体站立姿势平衡为 A 上支撑平衡 B 混合支撑平衡 C 上下支撑平衡 D 下支撑平衡 8 人体上支撑平衡从平衡能力来说是 A 有限稳定平衡 B 稳定平衡 C 不稳定平衡 D 随遇平衡 9 对于人体下支撑平衡,稳定角的个数是 A 2个 B 4个 C 8个 D 16个 10 骨的塑形与重建是通过适应力的作用而发生的,这是 A 牛顿定律 B 动量定理 C 沃尔夫定律 D 阿基米德定律 11 人体活动减少或肢体伤后固定,骨的力学特性改变是 A 强度与刚度均下降 B 强度增加,刚度下降 C 强度与刚度均增加 D 强度下降,刚度增加 12 手臂持球以肘关节为支点构成的杠杆是 A 平衡杠杆 B 省力杠杆 C 费力杠杆 D 混合杠杆
理论力学n第六章 点的运动学
第六章 点的运动学 6-1 图示曲线规尺的各杆,长为OA=AB=200mm ,CD=DE=AC=AE=50mm 。如杆OA 以等角速度s rad /5 π ω= 绕O 轴转动,并且当运动开始时,杆OA 水平向右。求尺上点D 的运动方程和轨迹。 解: 1. 取D 点为研究对象,坐标如图, 2. 由图,t π?2.0=,故点D 的运动方程为 t y t x D D ππ2.0s i n 1002.0cos 200== 3. 消去时间t ,得点D 的轨迹方程: 1100 200 2 22 2=+ D D y x 6-2 套管A 由绕过定滑轮B 的绳索牵引而沿导轨上升,滑轮中心到导轨的距离为l ,如图所示。设绳索以等速0v 拉下,忽略滑轮尺寸。求套管A 的速度和加速度与距离x 的关系式。 解: 1. 取套筒A 为研究对象,坐标如图, 2. 设0=t 时,绳上C 点位于B 处,在瞬时t , 到达图示位置,则 =++= +t v l x BC AB 02 2 常量 3. 将上式对时间求导,得套筒A 的速度和 加速度为 32 2 02 20, x l v dt dv a l x x v dt dx v - == +-== 负号表示v, a 的实际方向与x 轴方向相反。 6-3 如图所示,OA 和O 1B 两杆分别绕O ,O 1轴转动,用十字形滑块D 将两杆连接。在运动过程中,两杆保持相交成直角。已知:OO 1=a ;kt =?,其中k 为常数。求滑块D 题6-1图 题6-2图
的速度和相对OA 的速度。 解: 1. 取套筒D 为研究对象, 2. 点D 的轨迹是圆弧,运动方程和速度为 ak s akt R s ==== D v ,θ 3. 点D 在x O '轴向的坐标和速度为 kt ak x kt a x D D sin v ,cos D -='='=' D v 和D v '的方向如图所示。 6-4 小环M 由作平移的丁字形杆ABC 带动,沿着图示曲线轨道运动。设杆ABC 以速度 v =常数向左运动,曲线方程为y 2=2px 。求环M 的速度和加速度的大小(写成杆的位移x 的函数) 解:1.取M 点为研究对象, 2.将px y 22 =对时间求导数, 并注意==v x 常量,0=x ,得:,y x p y = 则:x p v y x v M 212 2 + =+= , x p x v y y x p y a M 242 2 -=-==
理论力学运动学基础
第五章运动学基础 一、是非题 1.已知直角坐标描述的点的运动方程为X=f1(t),y=f2(t),z=f3(t),则任一瞬时点的速度、加速度即可确定。()2.一动点如果在某瞬时的法向加速度等于零,而其切向加速度不等于零,尚不能决定该点是作直线运动还是作曲线运动。()3.切向加速度只表示速度方向的变化率,而与速度的大小无关。()4.由于加速度a永远位于轨迹上动点处的密切面内,故a在副法线上的投影恒等于零。()5.在自然坐标系中,如果速度υ=常数,则加速度α=0。()6.在刚体运动过程中,若其上有一条直线始终平行于它的初始位置,这种刚体的运动就是平动。()7.刚体平动时,若刚体上任一点的运动已知,则其它各点的运动随之确定。()8.若刚体内各点均作圆周运动,则此刚体的运动必是定轴转动。()9.定轴转动刚体上点的速度可以用矢积表示为v=w×r,其中w是刚体的角速度矢 量,r是从定轴上任一点引出的矢径。() 10、在任意初始条件下,刚体不受力的作用、则应保持静止或作等速直线平动。() 二、选择题 1、已知某点的运动方程为S=a+bt2(S以米计,t以秒计,a、b为常数),则点的轨迹。 ①是直线;②是曲线;③不能确定。 2、一动点作平面曲线运动,若其速率不变,则其速度矢量与加速度矢量。 ①平行;②垂直;③夹角随时间变化。 3、刚体作定轴转动时,切向加速度为,法向加速度为。 ①r×ε②ε×r ③ω×v④v×ω 4、杆OA绕固定轴O转动,某瞬时杆端A点的加速度 α分别如图(a)、(b)、(c)所示。则该瞬时的角速度为零, 的角加速度为零。 ①图(a)系统;②图(b)系统;③图(c)系统。 三、填空题
第六章:点的运动学
第六章 点的运动学 一、要求 1、能用矢量法建立点的运动方程,求速度和加速度。 2、能熟练地应用直角坐标法建立点的运动方程,求轨迹、速度和加速度。 3、能熟练地应用自然法求点在平面上作曲线运动时的运动方程、速度和加速度,并正确 理解切向加速度和法向加速度的物理意义。 二、重点、难点 点的曲线运动的直角坐标法,点的运动方程,点的速度和加速度在直角坐标轴上的投影。点的曲线运动的自然法(以在平面内运动为主),点沿已知轨迹的运动方程,点的切向加速度与法向加速度。 三、学习指导 点的运动学是整个运动学的基础。三种方法描述同一点的运动,其结果是一样的。如果将矢量法中的矢量r 、v 、a 用解析式表示,就是坐标法;矢量v 、a 在自然轴投影,就得出自然法中的速度与加速度。 直角坐标系与自然轴系都是三轴相互垂直的坐标系。直角坐标系是固定在参考系上,可用来确定每一瞬时动点的位置。点沿空间曲线运动有三个运动方程,点沿平面曲线运动有两个运动方程,点沿直线运动有一个运动方程。自然轴系是随动点一起运动的直角轴系(切向轴τ、法向轴n 及副法向轴b ),因此不能用自然轴系确定动点的位置。自然法以已知轨迹为前提,用弧坐标来建立点的运动方程,以确定动点每一瞬时在轨迹上的位置。 用直角坐标法求速度和加速度是将三个坐标分别对时间取一次和二次导数,得到速 度和加速度在三轴上的投影,然后再求它的大小和方向。用自然法求速度,则将坐标对时间取一次导数,就得到速度的大小和方向。自然法中的加速度物理概念清楚,τa 和n a 分别反映了速度大小和速度方向改变的快慢程度。需注意的是不能将dt dv 误认为是动点的全加速度。只有当0=n a 时,才有dt dv a = 。学员可自行分析,这时点作什么运动。 下面对矢量法、直角坐标法与自然法作一总结和比较:
第五章 运动学基础
第五章运动学基础 第1节运动学基本概念 运动学是研究物体运动几何性质的科学。运动学仅从几何的角度来研究物体运动的规律,而不考虑引起物体运动的物理因素。 在运动学中,常把物体抽象简化为点或刚体。如果物体的几何尺寸在运动过程中不起主要作用,则可以忽略物体的大小把它抽象为没有大小的点;否则,把物体抽象为具有大小的在任何情况下保持其形状和大小不变的物体,即刚体。 点的运动学主要介绍用矢量法、直角坐标法、自然法三种方法研究点的运动方程、轨迹、速度、加速度。 对点的复杂的运动,介绍点的合成运动的分析方法,讨论点相对于不同参考系的运动以及各种运动之间的关系。此方法也是研究刚体平面运动的基础。 刚体的运动主要介绍刚体的平行移动、刚体的定轴转动、刚体的平面运动。研究刚体做各种运动时的运动规律和特点,以及刚体上各点的速度、加速度的计算。 研究一个物体的机械运动,必须选取另一个物体作为参考,这个参考的物体称为参考体。与参考体固连的坐标系称为参考系。一般工程问题中,都取与地面固连的坐标系为参考系。 第2节点的运动学 一、矢量法 如图5-2-1-1所示,选取参考系上某确定点为O坐标原点,自点O向动点M作矢量r,称r为点M相对原点O的位置矢量,简称矢径。 图5-2-1-1 以矢量表示的点的运动方程为 r=r( t ) 动点M在运动过程中,其矢径r的末端描绘出的一条连续曲线,称为矢端曲线。矢端曲线就是动点M的运动轨迹。 点的速度矢量为 v= dr dt
点的加速度矢量为 a= dv dt = d 2 r d t 2 二、直角坐标法 图5-2-1-2 如图5-2-1-2所示,取固定的直角坐标系Oxyz,则动点M在空间的位置可用三个直角坐标x,y,z表示,动点M的运动方程为 x= f 1 (t) y= f 2 (t) z= f 3 (t) } 消去时间t可得动点M的轨迹方程。它们与矢量法中的矢径的关系为 r=xi+yj+zk 动点M的速度在三个坐标轴上的投影为 v x = dx dt v y = dy dt v z = dz dt } 即 v= v x i+ v y j+ v z k 动点M的加速度在三个坐标轴上的投影为 a x = dvx dt = d 2 x d t 2 a y = d v y dt = d 2 y d t 2 a z = d v z dt = d 2 z d t 2 } 即 a= a x i+ a y j+ a z k 三、自然法
《运动学基础》题库-无答案(14.5)
班级考号姓名 2013-2014 学年第二学期期末考试 《运动学基础》题库 2013 级康复治疗技术 1、2、3 班(学制: 3 年) 题号一二三四五总分合分人 得分 一、单选题(每小题 1 分,共 30 题) 第一章运动学绪论 1人体运动学的研究对象主要是 A 运动动作B运动行为C运动治疗方法D运动动作与运动行为 2 人体运动学的研究方法有 A 描述与分析 B 动物实验C建立抽象的数学模型D以上都是 3运动学研究内容中不正确的是 A关节运动与骨骼肌运动力学原理 B 运动中能量的供应方式 C物理治疗 D 运动动作分析 4学习运动学课程要用唯物辩证的观点去认识()的关系 A人体与环境 B 结构与功能C局部与整体 D 以上都是 5下蹲过程中下肢处于封闭运动链,因有 A 髋、膝与踝关节同时运动B仅髋关节活动C仅膝关节活动D仅踝关节活动 6写字时,上肢运动链处于开放运动链 A 仅有肩关节活动B仅有肘关节活动C仅有腕关节活动D有前臂与腕关节活动 7环节是指人体身上 A 活动的每个关节B相对活动的肢体C相对活动的节段D相对活动的关节 8打羽毛球时手臂挥拍向下扣球的动作属于 A推B拉C鞭打D蹬伸 9举重动作属于 A推B拉C鞭打D缓冲 10腾空起跳落下时的屈膝与屈髋动作属于 A推B拉C鞭打D缓冲 11骑自行车,腿的动作有 A推B拉C鞭打D蹬伸 12步行时,伴随骨盆和肢体的转运的运动形式为 A摆动B扭转C缓冲 D 蹬伸 13仰卧位时,上下肢互相靠拢的运动形式为 A扭转 B摆动C相向运动D鞭打 14 无氧运动是指()运动 A 小强度B中等强度C大强度D极量强度 15关于有氧运动错误的是 A 运动时间较长B中、小强度C一般健身锻炼D极量强度 16动力性运动错误的是 A 产生加速度B产生位移C抗阻力D维持躯体姿势 17运动动作可以 A 消除肢体肿胀B使肌力下降 C 增加关节周围组织粘连 D 使韧带挛缩 18 主动运动是指肌力达()时,即可由骨骼肌主动收缩完成肢体的运动 A1级B2级C3级D4级 19 相当于本人最大吸氧量55%-65%的运动强度是 A 极量强度B亚极量强度C中等强度D小强度 20打太极拳,其运动强度属于 A 极量强度B亚极量强度C中等强度D小强度 第二章运动学基础 1人体运动状态改变的原因是 A 力 B力矩C力和(或)力矩D速度 2骨骼肌张力相对于人体环节而言是 A 均为内力B内力和外力C外力和内力D均为外力 3人体整体的主动运动的必要条件是 A 摩擦力B重力C肌力D支撑反作用力 4运动物体的质量和速度的乘积称为 A动量B冲量C动能D势能 5人体缓冲动作可以 A 增大冲击力B减小冲击力C减少重力D增大重力 6物体的惯性与下面哪个物理量有关 A长度B重量C速度D质量 7人体站立姿势平衡为 A 上支撑平衡B混合支撑平衡C上下支撑平衡D下支撑平衡 8人体上支撑平衡从平衡能力来说是 A 有限稳定平衡B稳定平衡C不稳定平衡D随遇平衡 9对于人体下支撑平衡,稳定角的个数是 A2个B4个C8个D16个 10骨的塑形与重建是通过适应力的作用而发生的,这是 A 牛顿定律 B 动量定理C沃尔夫定律D阿基米德定律 11 人体活动减少或肢体伤后固定, 骨的力学特性改变是 A 强度与刚度均下降B强度增加,刚度下降 C 强度与刚度均增加D强度下降,刚度增加 12手臂持球以肘关节为支点构成的杠杆是 A 平衡杠杆B省力杠杆C费力杠杆D混合杠杆 13坐位时肌松弛,腰部的负荷 第1页共13页
第五章点的运动学
第五章 点的运动学 教学要求: 1、掌握描述点的运动的矢量法、直角坐标法和自然法。 2、能求平面运动点的运动方程、运动轨迹、速度和加速度。 当物体的几何尺寸和形状在运动过程中不起主要作用时,物体的运动可简化为点的运动,如空中飞行的飞机,当研究其飞行轨迹时,可将其简化为点的运动。当物体内各点的运动情况完全相同时,只需分析其中某一点的运动就够了,这样的物体也可简化为点的运动。研究点的运动具有独立的应用意义,也是研究一般物体运动的基础。本章研究点的简单运动,研究点相对某一个参考系的几何位臵随时间的变化规律,包括点的运动方程、运动轨迹、速度和加速度等。 §5-1 矢量法 矢径r ——自参考系坐标原点O 向动点M 所作矢量 矢径r 随时间变化的函数。 运动方程——r=r(t) 以矢量表示的形式 运动轨迹:矢径r 的矢端曲线 速度——v=dr/dt 矢径r 对时间的一阶导数。动点的速度矢沿轨迹的切线,并与点的运动方向一致。单位m/s 加速度——a=dv/dt=d2r/dt2 速度对时间的一阶导数,矢径r 对时间的二阶导数。单位m/s2 §6-2 直角坐标法 建立一个直角坐标系,动点任意瞬时在空间的位臵可用矢径表示,还可用三个直 角坐标表示。 直角坐标与矢径之间的关系:zk yj xi t r ++=)( 运动方程:x=f1(t),y=f2(t),z=f3(t) 轨迹方程:消去运动方程中的时间t 。 ∵r=xi+yj+zk ∴速度:v=dr/dt=dx/dti+dy/dtj+dz/dtk=vxi+vyj+vzk , ,,, 速度的大小和方向余弦:v= cos(v ,i)=v x /v ,cos(v ,j)=v y /v ,cos(v ,k)=v z /v 加速度:a =a x i +a y j +a z k ,加速度的大小和方向余弦: a = ,, cos(a ,i )= a x /a ,cos(a ,j )= a y /a ,cos(a ,k )= a z /a dt dx v x = dt dy v y =dt dz v z =2 2 2z y x v v v + +222z y x a a a ++22dt x d dt dv a x x ==22dt y d dt dv a y y ==2 2dt z d dt dv a z z ==
运动学第六章达朗贝尔原理习题课
达朗贝尔原理 习题课 主讲教师祝瑛 2016年3月27日星期日
ω α = 0 α = 0 α≠0 α≠0 ω ω ω (a ) (b ) (c ) (d ) 1.均质圆盘作定轴转动。试对图示四种情形向转轴进行惯性力系的简化。 2 I F m r ω=2 n I F m r ω=I F m r τ α=2 32 I mr M α =2 2 I mr M α =
1 ω1 α2 ω2 αC A O n I F τ I F IO M n IA F τIA F IA M 2.均质杆OA 长为L ,质量为m,绕O 轴转动的角速度ω1,角加速度α1,圆盘半径为R,质量为M , 相对杆的角速度为ω2,角加速度α2.计算杆对O 点及圆盘对A 点的惯性力系的简化结果.21 21ωml F n I =2 12 1ωl a n C =1213 1ααml J M O IO ==) (2 1212 ααα+==MR J M A A IA l a n A 21 ω=l M F n IA 21 ω=解:杆1 21ατ l a C =121ατml F I =1 ατ l a A =盘 1 ατ Ml F IA =绕O 轴转动平面运动
3.两种情形的定滑轮质量均为m,半径均为r.图a 中的绳所受拉力为W ;图b 中块重力为W . 试分析两种情形下定滑轮的角加速度、绳中拉力和定滑 轮轴承处的约束力是否相同。解: (a)Wr J O =a αWr mr =a 2 2 1αmr W 2a = α0=Ox F mg W F O y +=∑=0O M Oy F Ox F W T a =a αb αOy F Ox F IOa M mg mg F I W IOb M
机器人学第六章(机器人运动学及动力学)
第六章 机器人运动学及动力学 6.1 引论 到现在为止我们对操作机的研究集中在仅考虑动力学上。我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。 机构动力学是一个已经写出很多专著的领域。的确,人们可以花费以年计的时间来研究这个领域。显然,我们不可能包括它所应有的完整的内容。但是,某种动力学问题的方程式似乎特别适合于操作机的应用。特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。 有两个与操作机动力学有关的问题我们打算去解决。向前的动力学问题是计算在施加一 组关节扭矩时机构将怎样运动。也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ 和Θ 。这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ 和Θ ,我们欲求出所需要的关节扭矩矢量τ。这种形式的动力学对操作机的控制问题有用。 6.2 刚体的加速度 现在我们把对刚体运动的分析推广到加速度的情况。在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。即 B B Q Q B B Q Q 0V ()V ()d V V lim dt t t t t t ?→+?-==? (6-1) 和 A A Q Q A A Q Q 0()()d lim dt t t t t t ?→Ω+?-ΩΩ=Ω=? (6-2) 正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号 U A AORG V V = (6-3) 和 U A A ω=Ω (6-4)
6.2.1 线加速度 我们从描述当原点重合时从坐标架{}A 看到的矢量B Q 的速度 A A B A A Q B Q B B V V B R R Q =+Ω? (6-5) 这个方程的左手边描述A Q 如何随时间而变化。所以,因为原点是重合的,我们可以重写(6-5)为 A A B A A B B Q B B d ()V dt B B R Q R R Q =+Ω? (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。 通过对(6-5)求导,我们可以推出当{}A 与{}B 的原点重合时从{}A 中看到的B Q 的 加速度表达式 A A B A A A A Q B Q B B B B d d V (V )()dt dt B B R R Q R Q =+Ω?+Ω? (6-7) 现在用(6-6)两次── 一次对第一项,一次对最后一项。(6-7)式的右侧成为: A B A A A A B Q B B Q B B A A A A B B Q B B V () +Ω?+Ω?+Ω?+Ω? B B B B R R V R Q R V R Q (6-8) 把相同两项合起来 A B A A A A B Q B B Q B B A A A B B B V 2 () +Ω?+Ω?+Ω?Ω? B B B R R V R Q R Q (6-9) 最后,为了推广到原点不重合的情况,我们加上一项给出{}B 的原点的线加速度的项,得到下面的最后的一般公式 A B A A A A BORG B Q B B Q B B A A A B B B V 2 () ++Ω?+Ω?+Ω?Ω? A B B B V R R V R Q R Q (6-10) 对于我们将在本章上考虑的情况,我们总是有B Q 为不变,或 B Q Q V 0== B V (6-11) 所以,(6-10)简化为 A A A A A A Q BORG B B B B B V ()=+Ω?Ω?+Ω? A B B V R Q R Q (6-12) 我们将用这一结果来计算操作机杆件的线加速度。 6.2.2 角加速度 考虑{}B 以A B Ω相对于{}A 转动的情况,而{}C 以B C Ω相对于{}B 转动。为了计算 A C Ω我们把矢量在坐标架{}A 中相加
《理论力学》第六章 刚体的基本运动习题全解
图 题46-第六章 刚体的基本运动 习题全解 [习题6-1] 物体绕定轴转动的运动方程为334t t -=?(?以rad 计,t 以s 计)。试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解: 角速度: 2394)34(t t t dt d dt d -=-== ?ω 角加速度:t t dt d dt d 18)94(2-=-==ωα 速度: )94(2t r r v -==ω 切向加速度:rt t r a t 18)18(-=-==ρα 法向加速度:222 22 )94()]94([t r r t r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+= 物体改变方向时,速度等于零。即: [习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。后因刹车,该点以 )/(1.02s m t a t =作减速运动。设轮半径R=0.4m,求M点在减速运动过程中的运动方程及 t=2s时的速度、切向加速度与法向加速度。 解: t dt d a t 1.04.022-===? ρα (作减速运动,角加速度为负) 02=C ,故运动方程为: 速度方程:1005.02 +-=t v 切向加速度:)/(2.021.01.0|22s m t a t t -=?-=-== 法向加速度:222)25125.0(4.0+-?==t a n ρω [习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。经过5分钟 后,转子的角加速度为)/(600 s rad πω=。试求转子在这段时间内转了多少转? 解:kt dt d ==ωα ππ?60000450 300|3300=?==s t , 转数)30000260000N r (= π π [习题6-4] 图示为把工件送入干燥炉内的机构,叉杆m OA 5.1=,在铅垂面内转动,杆m AB 8.0=,A端为铰链,B端有放置工件的框架。在机构运动时,工件的速度恒为s m /05.0,AB杆始终铅垂。设运动开始时,角0=?。求运动过程中角?与时间的关系。并求点B的轨 迹方程。 解: OA作定轴转动;AB作刚体的平动。 01=C 故
《运动学基础》题库-无答案(14.5)教程文件
《运动学基础》题库-无答案(14.5)
2013-2014学年第二学期期末考试 《运动学基础》题库 2013级康复治疗技术1、2、3班(学制:3年) 一、单选题(每小题1分,共30题) 第一章运动学绪论 1 人体运动学的研究对象主要是 A 运动动作 B 运动行为 C 运动治疗方法 D 运动动作与运动行为 2 人体运动学的研究方法有 A 描述与分析 B 动物实验 C 建立抽象的数学模型 D 以上都是 3 运动学研究内容中不正确的是 A 关节运动与骨骼肌运动力学原理 B 运动中能量的供应方式 C 物理治疗 D 运动动作分析 4 学习运动学课程要用唯物辩证的观点去认识()的关系 A 人体与环境 B 结构与功能 C 局部与整体 D以上都是 5 下蹲过程中下肢处于封闭运动链,因有A 髋、膝与踝关节同时运动 B 仅髋关节活动 C 仅膝关节活动 D 仅踝关节活动 6 写字时,上肢运动链处于开放运动链 A 仅有肩关节活动 B 仅有肘关节活动 C 仅有腕关节活动 D 有前臂与腕关节 活动 7 环节是指人体身上 A 活动的每个关节 B 相对活动的肢体 C 相对活动的节段 D 相对活动的关节 8 打羽毛球时手臂挥拍向下扣球的动作属于 A 推 B 拉 C 鞭打 D 蹬伸 9 举重动作属于 A 推 B 拉 C 鞭打 D 缓冲 10 腾空起跳落下时的屈膝与屈髋动作属于 A 推 B 拉 C 鞭打 D 缓冲 11 骑自行车,腿的动作有 A 推 B 拉 C 鞭打 D蹬伸 12 步行时,伴随骨盆和肢体的转运的运动形式为 A摆动 B 扭转C缓冲 D蹬伸 仅供学习与交流,如有侵权请联系网站删除谢谢2
物理必修二第五章知识点归纳
2017—2018学年度下学期高一物理组 主备教师:夏春青 第五章曲线运动 一、教学目标 使学生在理解曲线运动的基础上,进一步学习曲线运动中的两种特殊运动,抛体运动以及圆周运动,进而学习向心加速度并在牛顿第二定律的基础上推导出向心力,结合生活中的实际问题对曲线运动进一步加深理解。 二、教学内容 1.曲线运动及速度的方向; 2.合运动、分运动的概念; 3.知道合运动和分运动是同时发生的,并且互不影响; 4.运动的合成和分解; 5.理解运动的合成和分解遵循平行四边形定则; 6.知道平抛运动的特点,理解平抛运动是匀变速运动,会用平抛运动的规律解答有关问题; 7.知道什么是匀速圆周运动;8.理解什么是线速度、角速度和周期;9.理解各参量之间的关系;10.能够用匀速圆周运动的有关公式分析和解决有关问题;11.知道匀速圆周运动是变速运动,存在加速度。12.理解匀速圆周运动的加速度指向圆心,所以叫做向心加速度;13.知道向心加速度和线速度、角速度的关系;14.能够运用向心加速度公式求解有关问题;15. 理解向心力的概念,知道向心力大小与哪些因素有关.理解公式的确切含义,并能用来计算;会根据向心力和牛顿第二定律的知识分析和讨论与圆周运动相关的物理现象; 16.培养学生的分析能力、综合能力和推理能力,明确解决实际问题的思路和方法。 三、知识要点 §5-1 曲线运动& 运动的合成与分解 一、@ 二、曲线运动 1.定义:物体运动轨迹是曲线的运动。 2.条件:运动物体所受合力的方向跟它的速度方向不在同一直线上。 3.特点:①方向:某点瞬时速度方向就是通过这一点的曲线的切线方向。
x v 船 v d t =m in ,θsin d x = 水 船v v =θtan ②运动类型:变速运动(速度方向不断变化)。 ③F 合≠0,一定有加速度a 。 ④F 合方向一定指向曲线凹侧。 ⑤F 合可以分解成水平和竖直的两个力。 4.运动描述——蜡块运动 & 三、运动的合成与分解 1.合运动与分运动的关系:等时性、独立性、等效性、矢量性。 2.互成角度的两个分运动的合运动的判断: ①两个匀速直线运动的合运动仍然是匀速直线运动。 ②速度方向不在同一直线上的两个分运动,一个是匀速直线运动,一个是匀变速直线运动,其合运动是匀变速曲线运动,a 合为分运动的加速度。 ③两初速度为 0的匀加速直线运动的合运动仍然是匀加速直线运动。 ④两个初速度不为0的匀加速直线运动的合运动可能是直线运动也可能是曲线运动。当两个分运动的初速度的和速度方向与这两个分运动的和加速度在同一直线上时,合运动是匀变速直线运动,否则即为曲线运动。 四、有关“曲线运动”的两大题型(一)小船过河问题 模型一:过河时间t 最短:模型二:直接位移x 最短:模型三:间接位移x 最短: ) , 当v 水
第六章运动学基础要点
第6章 运动学基础 一、是非题(正确的在括号内打“√”、错误的打“×”) 1.动点速度的大小等于其弧坐标对时间的一阶导数,方向一定沿轨迹的切线。 ( √ ) 2. 动点加速度的大小等于其速度大小对时间的一阶导数,方向沿轨迹的切线。 ( × ) 3.在实际问题中,只存在加速度为零而速度不为零的情况,不存在加速度不为零而速度为零的情况。 ( × ) 4.两个刚体做平动,某瞬时它们具有相同的加速度,则它们的运动轨迹和速度也一定相同。 ( × ) 5.定轴转动刚体的角加速度为正值时,刚体一定越转越快。 ( × ) 6.两个半径不等的摩擦轮外接触传动,如果不出现打滑现象,两接触点此瞬时的速度相等,切向加速度也相等。 ( √ ) 二、填空题 1. 描述点的运动的三种基本方法是矢径法、直角坐标法和自然坐标法。 2. 点做圆周运动,加速度由切向加速度和法向加速度组成,其中切向加速度反映了速度大小随时间的变化率,方向是沿圆周的切线;法向加速度反映了速度的方向随时间的变化率,方向是沿圆周的法线。 3. 质点运动时,如果d d s t 和22d d s t 同号,则质点做加速运动,反之则做减速运动。 4. 刚体运动的两种基本形式为平动和定轴转动。 5. 刚体平动的运动特征是刚体在运动的过程中其内的任一直线始终和原来的位置平行。 6. 定轴转动刚体上点的速度可以用矢积表示,它的表达式为r ωv ?=;刚体上点的加速度可以用矢积表示,它的表达式为v ωr εa ?+?=。 7. 刚体绕定轴转动时,在任一瞬时各点具有相同的角速度和角加速度,且各点轨迹均为 圆周。 8. 定轴转动刚体内点的速度分布规律为任何一条通过轴心的直径上各点的速度,若将速度矢的端点连成直线,此直线通过轴心。 9. 半径均为R 的圆盘绕垂直于盘面的O 轴做定轴转动,其边缘上一点M 的加速度如图6.23所示,试问两种情况下圆盘的角速度和角加速度的大小分别为:图(a):=ω0;=ε R a 。图(b):=ωR a ;=ε0。