FDD-LTE干扰与定位浅析
FDD-LTE干扰与定位浅析
概述
FDD-LTE系统采用同频组网方式,是一个噪声敏感系统。某运营商开始规模建设LTE-FDD试验网初期,由于采用1750MHz-1770MHz和1850MHz-1870MHz两个未使用过的40MHz频段,该频段内很容易存在来自系统内外的干扰。而FDD-LTE 系统内外干扰问题是网络维护优化时必须要考虑的关键问题之一。本文基于以上考虑,研究对该频段可能的干扰情况。并结合实际案例进行分析并提出找出干扰源的方法。
关键字FDD-LTE,干扰,频段划分, RBW,扫频。
1、 FDD LTE干扰分类
1.1系统内干扰
FDD-LTE采用同频组网方式,整个系统覆盖范围内的所有小区可以使用相同的频带为本小区内的用户提供服务,因此频谱效率高。但是对各子信道之间的正交性有严格的要求,否则会导致干扰。
1.1.1. 小区内干扰
由于OFDM的各子信道之间是正交的,这种特点决定了小区内干扰可以通过正交性加以克服。如果由于载波频率和相位的偏移等因素造成子信道间的干扰,可以在物理层通过采用先进的无线信号处理算法使这种干扰降到最低。因此,一般认为OFDMA系统中的小区内干扰很小。
振动时效设备https://www.360docs.net/doc/667464689.html,/
1.1.
2. 小区间干扰
LTE系统采用更灵活的频率复用策略,任何一个小区都有可能使用所有的频谱资源,因此小区间的干扰不可避免。对于小区间的同频干扰,可以采用干扰抑制技术,主要包括干扰随机化、干扰消除和干扰协调。干扰随机化和干扰消除是一种被动的干扰抑制技术,对网络的载干比并无影响。
1.2系统间干扰
目前FDD-LTE可是使用的频率包括1.8GHz(1755-1785MHz/1850-1880MHz) 和2.1GHz(1955-1980MHz/2145-2170MHz)频段。目前某运营商使用的是1.8GHz ( 1755-1785MHz/1850-1880MHz)频段。系统间干扰又包括:
1、邻频干扰:如果不同的系统工作在相邻的频率,由于发射机的邻道泄漏和接收机邻道选择性的性能的限制,就会发生邻道干扰。
2、杂散辐射:由于发射机中的功放、混频器和滤波器等器件的非线性,会在工作频带以外很宽的范围内产生辐射信号分量, 包括热噪声、谐波、寄生辐射、频率转换产物和互调产物等。当这些发射机产生的干扰信号落在被干扰系统接收机的工作带内时,抬高了接收机的噪底,从而减低了收灵敏度。
3、互调干扰:主要是由接收机的非线性引起的,后果也是抬高底噪,降低接收灵敏度。种类包括多干扰源形成的互调、发射分量与干扰源形成的互调和交调干扰。
4、阻塞干扰:阻塞干扰并不是落在被干扰系统接收带内的,但由于干扰信号过强,超出了接收机的线性范围,导致接收机饱和而无法工作。为了防止接收机过载,收信号的功率一定要低于它的1dB压缩点。
振动时效设备https://www.360docs.net/doc/667464689.html,/
振动时效设备 https://www.360docs.net/doc/667464689.html,/ 2、频谱干扰分析
2.1 LTE 频段理论底噪 RBW (ResolutionBandwidth )扫频仪频率分辨率,代表两个不同频率的信号能够被清楚的分辨出来的最低频宽差异 NFrev (NoiseFactor )为扫频仪接收噪声系数,决定扫频仪接收机灵敏度 底部噪声
=-174+10*log (RBW )+NFrev
测试过程中,设置以下参数:
RBW 取值为30KHz ,NFrev 根据扫频仪厂家提供为6dB (Tektronix 扫频仪灵敏度),得到本次测试的底部噪声为-123dBm 。
2.2 LTE 频谱干扰分析
对1750MHz-1770MHz 和1850MHz-1870MHz 的频段进行可能的干扰分析:
1750MHz-1770MHz 频段
1、该频段被非法占用
2、阻塞干扰:DCS1800(上行频段1710MHz-1755MHz )
3、杂散干扰:DCS1800(上行频段1710MHz-1755MHz )
4、互调干扰:
a) DCS1800(上行频段1710MHz-1755MHz,下行1805MHz-1850MHz)
b) GSM900/E-GSM(上行频段889MHz-909MHz)
c) CDMA下行频段(下行频段870MHz-880MHz)
5、二次谐波:
a) GSM900/E-GSM(上行频段889MHz-909MHz使用)
b) CDMA下行频段(870MHz-880MHz)
1850MHz-1870MHz频段
1、该频段被非法占用
2、阻塞干扰:
a) DCS1800(下行频段1805MHz-1850MHz)
b) F频段(1880MHz-1920MHz)
3、杂散干扰:
a) DCS1800(下行频段1805MHz-1850MHz)
b) F频段(1880MHz-1920MHz)
4、互调干扰:
a) GSM900/E-GSM(下行频段934MHz-954MHz)
振动时效设备https://www.360docs.net/doc/667464689.html,/
振动时效设备 https://www.360docs.net/doc/667464689.html,/ b) DCS1800(上行频段1710MHz-1755MHz ,下行1805MHz-1850MHz )
5、二次谐波:
a) GSM900/E-GSM (下行频段934MHz-954MHz )
3
、干扰定位案例
【问题描述】
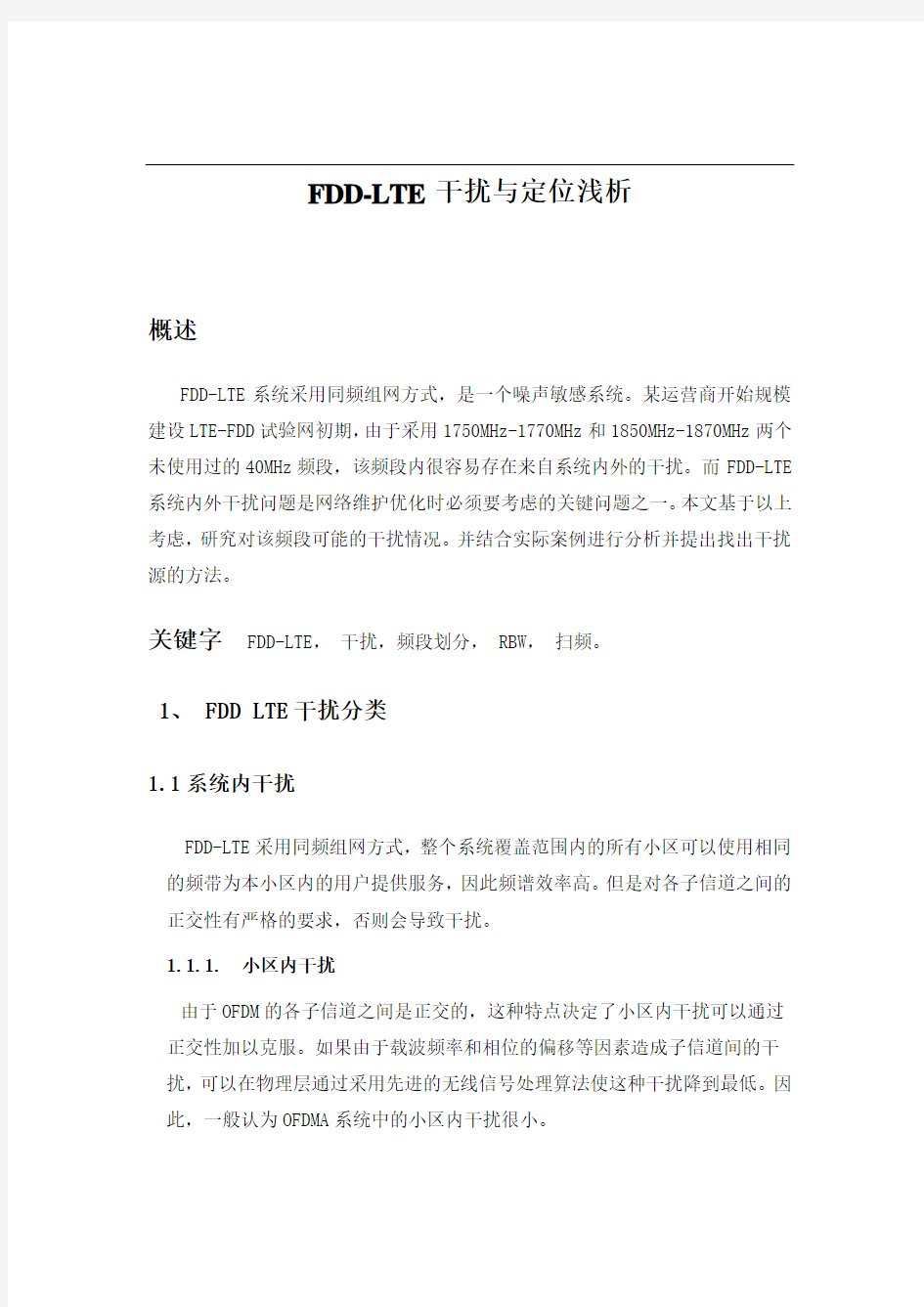
武汉簇9优化过程中,测试发现轻轨二桥基站下UE 占上0小区就会掉线,现场测试发现轻轨二桥基站RSRP 在-60dBm 左右,SINR 在3dB 左右。
【原因分析】
后台检测该站三个小区RSSI 如下图所示:
从上图中,我们可以看到如图所示轻轨二桥站三个小区在1750MHz-1770MHz 整体都有信号强度为-110dBm左右的信号干扰。并且0小区干扰最为严重。根据该干扰信号的特点,初步估计为该频段被非法占用。
【处理过程】
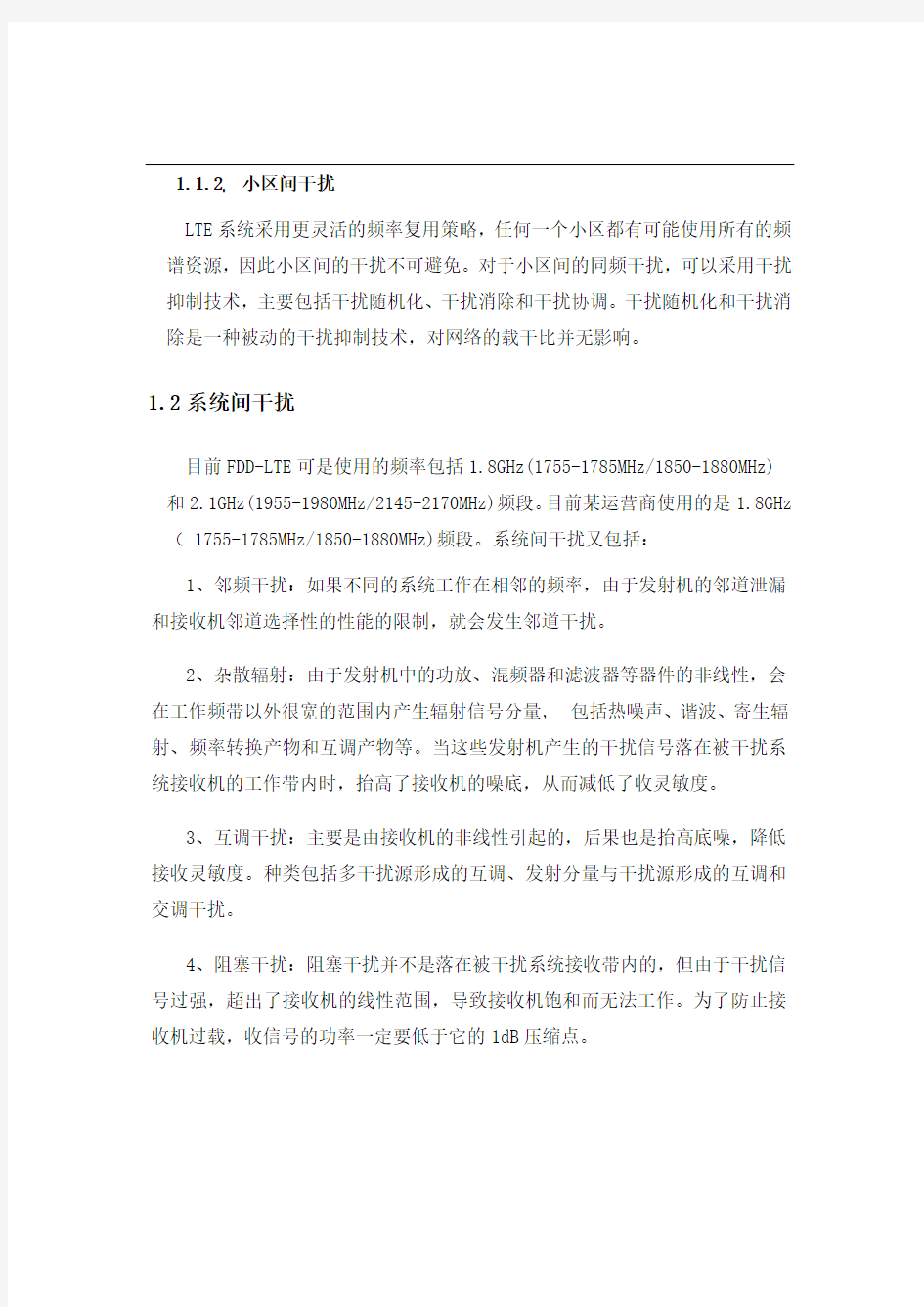
测试人员携带频谱分析仪(Tektronix)来到距离轻轨二桥0小区仅20米远的一处某运营商基站下(下图一),根据第2.2章节频谱干扰分析以及之前扫频分析,怀疑某运营商非法占用1750MHz-1770MHz和1850MHz-1870MHz两个频段。关闭轻轨二桥三个小区和所携带的UE终端。现场测试依旧在1750MHz-1770MHz和
1850MHz-1870MHz两个频段发现强度为-85dBm左右,频宽大于100MHz的干扰信号(下图二、三)。
振动时效设备https://www.360docs.net/doc/667464689.html,/
图一(测试点位于某运营商小区下)
振动时效设备https://www.360docs.net/doc/667464689.html,/
图二(上行测试情况)
振动时效设备https://www.360docs.net/doc/667464689.html,/
图三(下行测试情况)
【结论】
该核查结果符合初步估计的结果,在测试过程中,当八木天线指向目标干扰源的时候,频谱仪上干扰明显出现,其他方向干扰基本没有,因此干扰的产生可能是铁通大楼上的某运营商基站非法占用1750MHz-1770MHz和1850MHz-1870MHz
两个频段。
振动时效设备https://www.360docs.net/doc/667464689.html,/
振动时效设备 https://www.360docs.net/doc/667464689.html,/
干扰小区位置图
【案例总结】
对于上行干扰问题处理:
1、通过后台网管找出RSSI异常的小区。通过小内各RB噪声功率值初步判断干
扰信号的频段分布。
2、使用频谱仪频对受干扰小区附近可能存在的干扰源进行扫频测试,并通过关
闭受干扰小区和UE终端等手段。确定干扰信号的场强及频率分布。
3、结合2.1章节频谱干扰分析方法及干扰信号频率分布、强度的特性判断干扰
信号的分类。
4、利用八木天线的指向性,进一步确定干扰源。
4、结束语
FDD-LTE网络是一个可以同频组网的全PS业务网络,网络干扰水平的大小直接影响承载各项业务的吞吐率高低以及网络整体的容量,进而影响到用户的实际体验和感知,因此FDD-LTE网络的干扰排查工作显得尤为重要。文章在基于武汉轻轨二桥基站干扰排查相关经验总结的基础上,结合湖北现网实际情况,浅析了FDD-LTE网络干扰的主要因素与原因,并结合案例对系统间干扰进一步分析,并给出排查方法,对某运营商FDD-LTE建网以及后续网络质量提升工作在降低干扰方面有一定的指导和借鉴意义。
振动时效设备https://www.360docs.net/doc/667464689.html,/
高精度超短基线在水下定位中的应用
高精度超短基线在水下定位中的应用高精度超短基线定位系统在水下定位中的应用 1 2张粤宁刘鹏 (1.武汉长江航道救助打捞局,武汉430014;2.上海地海仪器有限公司,上海200233) 摘要:声学定位系统(Acoustic Positioning System)的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。本文以某品牌超短基线定位系统为例,就超短基线 hort BaseLine)声学定位系统的原理、应用范围等几个方面展开讨论,同时介绍(Ultra S 了高精度超短基线工程中的实际应用,对使用过程中影响定位性能的主要因素进行了简单分析。 关键词: 超短基线水下定位 1 概述 20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基 线(简称USBL)水下设备大地定位技术也获得了长足的发展。高精度水下定位系统具有 广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考 古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料, 因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
1(1关于水下声学定位系统 20世纪50,60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。 声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。对大多数用户来说,可重复性精度要比绝对精度重要。 在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。 长基线(LBL):长基线定位能在宽广的区域内提供高精度的位置,它需要至少3个应答器组 成的阵列部署在海底上的已知点上,水面舰只安装一个换能器。换能器测量出到水底应答器的斜距,从而计算出自身的坐标位置。
高干扰小区排查方法
高干扰小区排查方法 1.概述 目前GSM干扰主要来自网内和网外的干扰。网内干扰主要是频率资源有限,频率复用越紧密,网络容量越大,复用距离越小,干扰就越大;网外干扰主要来自GSM往外的干扰,如干扰器、雷达等产生影响。干扰的大小是影响网络的关键因素,对通话质量、掉话、切换、拥塞均有显著影响。 经筛选,目前石家庄网络共177个小区存在4-5级干扰,如下: 目前7个小区存在外部干扰,需要用相关的扫频设备进行扫频;134个宏站存在频点或者互调干扰,可修改频点或者携带相关设备仪器进行天馈排查;另外36个室分小区存在互调干扰,需要排查室分干放设备,小区列表如下: 干扰小区列表.xls 2.干扰排查 目前干扰发现主要是测试和华为OMC操作台。上行干扰是BTS在空闲时可以利用一幀中的空闲时隙对其TRX所用频点的上行频率进行扫描,并统计到五个等级干扰带中,通过WEB LMT可实时观察目前载频干扰带分布和等级,在话统可以提取出五个等级的干扰带的统计。石家庄现网中统计4-5级干扰带所占比例,4-5级干扰带比例越高,则小区的干扰越强。
3.干扰处理流程 根据上图,在OMC的操作台的话统统计中统计4-5级干扰带比例,确定小区是否存在上行干扰。在凌晨时段定时发空闲的Burst后,根据干扰带变化和最近一段时间中全天的走势和强度,以及所有干扰小区的分布区域,初步确定是否存在外部干扰,如果确定外部干扰,则要对外部干扰区域进行扫频。 如果确定不是外部干扰,可通过iManager Nastar检查该小区的频点,从频点的干扰程度和复用程度判定是否修改频点。确定不是频点干扰后,可将干扰定位为设备的互调干扰,根据互调干扰定位方法进行分析。 3.1.外部干扰小区排查 观察话统统计,SJGH0115师大图书馆在早忙时8点干扰突然上升,通过对比前天的干扰带指标,干扰是突发出现,对用户的通话质量造成了一定的影响,该站掉话次数明显增加。下图为造成干扰的区域:
通信卫星干扰源定位 (3)
基于时延差和频移差参数的通信卫星干扰源定位方法 摘要 关键词:
1.问题重述 1.1 研究意义 随着对卫星通信既可提供实时的,也可以提供存储-转发的延时通信服务工具的日益加深的认识,卫星通信已经进入了军事侦察、通信广播、电视直播、导航定位。气象预报、资源探测、环境探测和灾害防护等国防和民用的各个领域,而令它已经成为了不可或缺的通信手段。但卫星对地静止轨道只有一条,随着卫星通信业务的迅速发展,竞争更加激烈,有限的轨道资源变得更加紧张,电磁环境也将更加恶化。卫星通信系统是一个开放式的系统,具有覆盖面广和信道“透明”的特点。它公开的暴露在空间轨道上,又生存在这样一个濒繁复杂的电磁环境中,所以它很容易受到干扰甚至摧毁,并且很难查出干扰源 所以,当我们受益于它覆盖过大、不受地理条件限制、通信频带宽、容量大、激动灵活等众多优点时,容易受到自然现象、设备故障、临星干扰、人为原因,又或是它们彼此之间相交叉等各种干扰这一弊端也就不得不引起我们的注意,因为它很大程度上影响了通信卫星的正常运行,继而扰乱了我们的正常生活。 虽然一些国际组织和各国卫星公司进行轨道、频率和功率的分配和协调,但是仍未完全避免卫星通信受到干扰,众所周知的最近几年相继发生的中央电视台第一套卫星节目受干扰;深证证券交易所、国家地震预报监测网通信受干扰;法轮功攻击鑫诺卫星等时间便是明显的例证。 对卫星非法访问,给卫星的运营商和用户造成了严重的影响。未经授权地向卫星发射通信信号或载波,能够干扰卫星上一个或者多个转发器的正常业务,使通信质量下降。如果干扰信号功率足够大,还可能造成卫星上合法业务的中断。全球每年较大的卫星通信干扰事件达到几千次之多,而且随着卫星通信业务量的增加,地球同步卫星轨道的拥塞,这个数目还会逐渐地增加。这种干扰主要来自人为错误或设备故障,也不能排除蓄意窃取转发器资源或者恶意阻断业务。 目前,为了进一步提高卫星干扰源的定位精度,还需要对干扰源测量方法进行深入的研究。完善我国卫星干扰源定位系统,这对于我国的卫星广播通信及其它卫星应用的正常运行和信息安全有重要的作用[6]。 1.2 卫星干扰源定位的用途 对卫星的干扰一般分为有意干扰和无意干扰两种情况[1],不论哪种情况都需要准确知道干扰源的位置和干扰频率,所以卫星干扰源定位系统在解决卫星无线电频率冲突问题上有十分重要的作用。随着信息化时代的到来,国内外都很重视信息安全问题。特别是卫星广播电视系统的安全问题日益受到政府部门的重视,
TD-LTE系统远距离同频干扰解决思路
TD-LTE系统远距离同频干扰能解决吗? 传统的同频干扰可以通过优化频点配置、干扰白噪化、功率控制、干扰协调、波束赋型等方式来对抗。对于时分双工模式(TDD)系统,(学习更多LTE知识,请关注红松微信公众号“hongsongchina”)要求基站保持严格的时间同步。不同基站之间的时间同步包括帧头同步和上下行转换同步。同时,由于TDD系统的上行和下行传输共享同样的频率,TDD系统中除存在传统的小区间的干扰外,还存在远端基站的下行信号干扰目标小区上行信号的情形。TDD系统的远距离同频干扰发生在相距很远的基站间。随着传播距离的增加,远端发射源的信号经过传播延迟到达近端同频的目标基站后,可能会进入目标基站的其他传输时隙,从而影响近端目标系统的正常工作,如图所示。由于基站的发射功率远大于终端的发射功率,因此远距离同频干扰主要表现为远端小区下行信号干扰近端目标基站的上行接收。
前面我们已经可以定位出TD-LTE系统远距离同频干扰源,TD-LTE的帧结构设计,使得系统可以通过有效的辅以基站间信息交互,(学习更多LTE知识,请关注红松微信公众号“hongsongchina”)实现相关小区自动配置,使得系统可以通过有效的判断和基站间信息交互的方式,利用TD-LTE系统的协议特点使相关小区实现自动配置,以消除远距离同频干扰或减轻远距离同频干扰带来的影响。 根据配置方式的不同,列举几种不同的TD-LTE系统远距离同频干扰解决方案。 方法一:PRACH自适应 当确定了受扰基站是受到远距离同频干扰后,受扰基站PRACH自动改为非Format 4格式,避免随机接入受扰,使得上行性能损失较小。 距离同频干扰多发地区,也可以固定在非UpPTS时隙传输上行PRACH信号(非Format 4格式),将可能受扰基站的PRACH移到不会受到干扰的其他上行时隙(例如第2个上行时隙),以避免远距离同频干扰的发生。即便是PRACH配置在UpPTS,采用Format 4,也可以配置成与P-SCH在频域错开,避免远端基站主辅同步信道造成的干扰。 方法二:特殊时隙自动配置 通过缩短DwPTS数据部分可以增大GP时长,从而加大远距离同频干扰的保护距离。在保护距离内,不会产生远距离同频干扰,但是下行吞吐量有一定损失。具体实施包括施扰基站和受扰基站的自动配置。
水下和海底大地坐标的精确测量
文章编号:1009-671X(2003)09-0019-03 水下和海底大地坐标的精确测量 张 炜1,王大成2 (1.中国人民解放军91550部队,辽宁大连 116000;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001)摘 要:潜艇水下高精度定位,长期以来一直是水下导航定位领域的一个难题.为了解决潜艇在水下长时间航行过程中的高精度定位问题,提出了一种比较实用的解决方案.该方案构建了由DGPS 定位和水声定位相结合的水下定位系统.系统采用系缆浮筏作为潜艇,利用DGPS 进行水下定位的中继站,利用水声相对定位技术将DGPS 水面定位向水下延伸,使潜艇在工作潜深就可以直接获得自身的大地经纬度坐标.系统将DGPS 的优良性能与超短基线在水下定位中的优势很好地结合在一起,其定位精度可以保证与DGPS 水面定位精度在同一量级.关 键 词:DGP S;高精度;水下定位中图分类号:T B568 文献标识码:A Precision measurement of coordinates of underwater and sea bed ZHANG Wei 1,WANG Da cheng 2 (1.T he Chinese Peo ple s Liberation Army No.91550,Dalian 116000,China;2.School of U nder water Acoust ic Engineer ing ,Harbin Eng ineering U niversity ,Har bin 150001,China) Abstract:For a long time,high precision positioning for underw ater submarine has been a difficult problem in the field of underw ater navigation and positioning.The traditional positioning for submarine depends on inertial navigation system (INS).But the positioning error of INS accumulates along w ith time.In order to solve the problem of high precision positioning for underw ater subm arine,this paper proposed a relatively practical scheme.T his scheme constructs an underw ater positioning system based on the combination of DG PS and acoustical positioning.This method makes use of acoustical relative positioning technique for ex tend ing the DGPS positioning technique for surface applications to underw ater cases.With this positioning sys tem ,the submarine can directly get its long itude and latitude,and the positioning precision can ensure the same level as the surface application cases of DGPS. Key words:DGPS;high precision;underwater positioning 大地坐标点的测量有两种工作状态需要考虑.第一,水中和海底运动目标大地坐标的实时测量.这在ROV 、水下机器人等的水下作业和潜艇、潜器、水下无人作战平台等军事武备水下实验过程中是经常遇到的.第二,固设于海底处的大地测量控制点坐标的测量.这是被称为 海洋大地测量!任务的一项基础性工作[1],它对于潜艇水下航行、各种水下作业、海底地图测绘等有重要作用. 近年来,由于差分式全球定位系统(DGPS)和高精度水声定位技术的飞速发展,为水下以及海底高精度大地坐标的精确测量提供了更先进的技术手段.尤其是国家海事局在北起大三山、南至防城和三亚港,沿整个海岸线建成的包括总计有20个差分站组成的RBN/DGPS 系统,使无线电差分信号有效地覆盖了我国以海岸为基线的大约300km 的水域范围.再加上美国出于自身商业利益的考虑,取消了C/A 码上的精度干扰,使得DGPS 系统的应用更加方便和有效. 近年来国内外的水声定位技术不断发展,定位精度不断提高,轻便易用的超短基线水声定位系统(USBL 系统)原有的相位模糊(目标定位位置跳象限)、在与基阵面垂直向下的方向和水平方向存在低精度区等缺点,已被克服,加上采用一系列的近代信号处理技术,使USBL 系统能以稳定的高精度测量结果参与水下或海底点坐标测量系统[2,5]. 收稿日期:2002-06-28. 作者简介:张 炜(1961-),男,工程师,主要研究方向:测控技术. 第30卷第9期 应 用 科 技 Vol.30,?.92003年9月 Applied Science and Technology Sep.2003
上行干扰定位及解决方法
3 上行干扰定位及解决方法 3.1 上行干扰定位步骤根据实际项目中干扰排查统计,出现上行干扰最多的情况是干放设备导致的,其次是空腔合路器和外部干扰。因此,在上行干扰问题排查过程中,排查思路和原则有两个:一是先排查出现上行干扰可能性最大的情况,二是排查按照由易到难的顺序。 3.2 上行干扰定位方法 3.2.1 基站侧干扰定位 (1)互调干扰定位 ?首先通过互调计算小工具(见附录),分析该基站频点之间的互调信号是否会对该站点上行构成干扰。通常认为互调信号刚好落到上行频点或邻频点上时,会对该站点上行形成干扰。?互调干扰的特点是:通常只干扰上面互调计算时得到的频点,基本不会干扰所有的频点。?其次,互调干扰验证测试:只在产生互调干扰的频点上,满功率发空闲burst测试,并和其他频点满功率发空闲burst测试情况进行对比。若前者测试上行干扰大,而后者测试上行干扰正常,则可判定存在互调干扰,建议重新规划频点。 (2)空腔合路器干扰定位 断开室内分布系统,将基站输出端口直接接上低互调电缆和低互调负载,或者为了工程操作方便,基站输出经过30dB衰减器后连接室内小天线。然后所有载频,满功率发空闲burst 测试,如果上行干扰带等级在0或1级,则说明空腔合路器没有问题。否则更换空腔合路器。 3.2.2 室内分布系统干扰定位 排除了基站侧不存在上行干扰问题后,可进一步定位干扰源位置。 ?首先,所有载频满功率发空闲burst测量,逐台关闭干放,观察上行干扰变化情况,当关闭某台干放后,上行干扰恢复正常,则可定位到该台干放支路存在问题。 ?其次,定位到某台干放支路引起上行干扰后,检查干放上下行增益设置是否合理,如果上行增益设置过大,则调整上行增益后再验证测试。 ?第三,如果上行增益设置正常,则需要检查干放输入信号是否过强,如果超出干放设备正常输入范围之外,则需要在输入端增加衰减器,使干放工作在线形工作状态。 ?第四,如果定位到某台干放后,上行增益和干放输入功率都设置正确,且已经排除基站本身和外部干扰,那么需要更换干放,然后验证测试。 ?第五,若按照以上方法仍不能定位,则需要检查室内分布系统中的无源器件(方法:测试各节点驻波系数)。尤其是基站输出合路器。 3.2.3 外部干扰定位 ?当关闭干放,上行干扰恢复正常,而又排除了干放设备问题,则外部干扰的可能性就很大。 ?采用扫频仪,或者采用频谱仪和外接定向天线,在覆盖区域扫频测试上行频段,确认干扰源位置。注意需要选择精度较高的频谱仪。
隧道人员精确定位方案2020
隧道人员精准定位方案(精度小于0.5米) 北京华星北斗智控技术有限公司 2020年3月
目录 一、技术先进性简介 (3) 二、定位原理 (4) 三、系统拓扑图 (5) 3.1、网桥传输模式 (5) 3.1、有线传输模式 (7) 四、定位系统功能介绍 (8) 4.1、精确的定位功能 (8) 4.2、自动考勤统计功能 (10) 4.3、轨迹回放功能 (12) 4.4、一键呼救功能 (13) 4.5、电子围栏功能 (14) 4.6、标签基站管理功能 (16) 4.7、长时间静止报警功能 (17) 4.8、气体检测功能 (18) 4.9、LED投屏功能 (21) 五、定位基站的供电 (22) 六、定位标签的供电 (23) 七、定位基站的安装 (24) 八、定位基站参数 (27) 九、定位标签参数 (30) 十一、项目案例 (33) 2
一、技术先进性简介 华星智控隧道人员定位管理系统采用我司具有自主知识产权的UWBLOC技术,该技术基于无线脉冲通信原理实现定位,UWBLOC技术利用纳秒至微秒级的非正弦波窄脉冲传输数据。通过在较宽的频谱上传送极低功率的信号,UWBLOC能在300米左右的范围内实现数百Mbit/s至数Gbit/s的数据传输速率。 UWBLOC技术抗干扰性能强,传输速率高,系统容量大发送功率非常小。UWBLOC系统发射功率非常小,通信设备可以用小于1mW的发射功率就能实现通信。低发射功率大大延长系统电源工作时间。而且,发射功率小,其电磁波辐射对人体的影响不到手机千分之一。 UWBLOC隧道人员定位系统定位精度最高可以做到10厘米,毫秒级的延迟实时显示人员的位置,可以实现隧道内的2维或1维精确定位。 UWBLOC系统信号几乎不对工作于同一频率的无线设备造成干扰,信号具有极强的穿透能力,可在室内和地下空间比如隧道、管廊等进行精确定位,相比于GPS卫星定位系统只能工作在露天环境,在定位卫星的可视范围之内;UWBLOC定位系统可以实现室内室外的精确定位,部署更为方便价格更为便宜。 3
LTE干扰排查指导书
LTE干扰排查指导 1.1 LTE常见干扰 F频段常见干扰: DCS1800杂散干扰; DSC1800阻塞干扰; DCS1800互调干扰; GSM900谐波干扰; 其他干扰(PHS、电信FDD-LTE等); D频段常见干扰: 广电MMDS; CDMA800三次谐波; 公安机关监控的电源控制箱; 1.2 干扰波形特征 1.2.1 DCS1800杂散干扰波形特征 杂散干扰波形特征:前40个RB底噪偏高,底噪随RB数逐渐增大而降低。 举例1:cell1\cell2存在杂散干扰
举例2:cell2小区存在杂散干扰 1.2.2 DCS1800阻塞干扰波形特征 DCS1800阻塞干扰波形特征:20M带宽内100个RB噪声整体偏高。 举例1:Cell1存在阻塞干扰,整体100个RB噪声升高。 举例2:广州榕溪工业区FE1小区存在阻塞干扰,整体RB底噪偏高,去掉1865MHz~1875MHz频点后,干扰消失;
1.2.3 DCS1800互调干扰波形特征 DCS1800互调干扰波形特征:底噪高低起伏,底噪有高有低。 举例1:cell1存在DCS1800互调干扰。 举例2:LTE1、2、3小区存在互调干扰存在DCS1800互调干扰。
1.2.4 GSM900谐波干扰波形特征 GSM900谐波干扰波形特征:带内个别RB噪声较高,没有突起的RB底噪较低。 举例1:小区2存在GSM900谐波干扰 1.2.5 PHS干扰波形特征 小灵通干扰的小区NI曲线,一般会使靠近1900MHZ附近NI噪声抬升。靠近1900MHZ 处噪声至1880MHZ处噪声幅度逐渐降低。 举例1: 举例2:棠下上社2FE收到PHS干扰
TD-LTE上行干扰定位方法与排查指导手册(诺西主设备)V01
TD-LTE上行干扰定位方法与排查指导手册(诺西主设备) V0.1 中国移动通信集团浙江有限公司 2014年3月
目录 第一章前言 (2) 第二章TD-LTE高干扰小区筛选方法 (3) 2.1 RSSI统计指标提取步骤 (4) 2.2 NPI干扰跟踪操作步骤 (7) 2.3 RSSI统计数据输出呈现 (12) 2.4 NPI干扰跟踪输出呈现 (12) 第三章TD-LTE高干扰小区干扰分析和确认 (13) 3.1干扰分析准备工作和排查指导 (13) 3.2 后台排查流程 (17) 3.3 前台排查流程 (18) 3.4 系统内干扰分析和确认 (18) 3.4.1系统内干扰分析 (18) 3.4.2系统内干扰确认 (19) 3.4.3系统内干扰整治 (20) 3.4.3系统内干扰案例 (20) 3.5阻塞干扰分析和确认 (22) 3.5.1阻塞干扰分析(宁波暂时未发现阻塞干扰) (22) 3.5.2阻塞干扰确认 (22) 3.5.3 阻塞干扰整治 (23) 3.6互调干扰分析和确认 (23) 3.6.1互调干扰分析 (23) 3.6.2互调干扰确认 (24) 3.6.3 互调干扰整治 (24) 3.6.3 互调干扰案例 (25) 3.7杂散干扰分析和确认 (26) 3.7.1杂散干扰分析 (26) 3.7.2杂散干扰确认 (27) 3.7.3 杂散干扰整治 (28) 3.7.4 杂散干扰案例 (28) 第四章相关经验干扰排查经验分享 (31)
第一章前言 对于移动通信网络,保证业务质量的前提是使用干净的频谱,即该频段没有被其他系统使用或干扰。否则,会使受干扰系统的性能以及终端用户感受都会产生较大的负面影响。 随着4G LTE基站的逐步建设,目前已形成了2/3/4G基站共存的局面,系统间干扰的概率也大幅提升,在目前已建设的基站中,已发现大量的TD-LTE基站受到上行干扰。这些干扰主要包括2/3G小区对TD-LTE小区的阻塞、互调和杂散干扰,此外还有其他无线电设备,如PHS基站带来的外部同频干扰,具体如下表: 表1:TD-LTE各频段上行容易受到的干扰 从上表可以看出,由于F频段与干扰源系统的频率比较接近,因此F频段受到的干扰最多,本文侧重于实际操作,因此对于TD-LTE各频段所受干扰的分析具体可见中国移动研究院编撰的《TD-LTE系统间干扰排查与规避指导手册》。 按照诺西提出的要求,NPI全频段20M>=-109,认为存在干扰,需要处理。 本TD-LTE干扰排查指导手册以诺西宏站为排查对象,通过诺西的小区级RSSI话统筛选出上行RSSI>-89dBm且持续5天时间出现10次的小区,并通过NPI 上行干扰跟踪功能,NPI>=-109dbm定位为干扰小区,结合2/3G基站工参信息,采用上下行分离的PC-Tel扫频仪现场进行干扰排查,并与2/3G网管配合对干扰进行网管确认,最后进行现场确认并进行干扰整治,总体流程如下图所示:
RFID人员精确定位服务方案
沃科RFID人员精确定位方案 沃科合众科技(北京)有限公司 Walk Horizon Version 1.0 2011年11月
目录 1.系统概述 (3) 2.系统目标 (3) 3.设计原则 (3) 4.系统及产品特点 (4) 5.系统组成及组件功能 (4) 6.系统网络构成示意图 (5) 7.系统功能 (6) 7.1.系统基本功能 (6) 7.2.人员的定位功能 (6) 7.3.敏感区域或人流密集区域监控功能 (6) 7.4.保安人员巡逻监督功能 (7) 7.5.系统的电子地图功能 (7) 7.6.系统多时间区段功能 (7) 8.产品介绍 (8)
1.系统概述 RFID人员精确定位系统是通过远距离、非接触式采集电子标签的信息,实现人员在移动状态下的自动识别,从而实现目标的自动化管理。该系统产品集计算机软硬件、信息采集处理、数据传输、网络数据通讯、等技术综合应用为一体的高性能识别技术,是实现信息化和自动化管理的基础产品之一,是一种能有效对社区人员进行自动识别和联网监管的重要科技手段。 2.系统目标 1、保安巡检点追踪,关键路线的全部覆盖; 2、工作人员出/入社区自动记录; 3、人员定位查询,了解具体人员所处的区域; 4、关键区域内人数统计分析: 关键区域可设定为:区域A,区域B,设备间,消防间,办公区等; 定义报警阙值,当区域内人员的数量达到报警值,系统提出警示,便于安全管理和及时疏散人群。 3.设计原则 ?实用性 系统具备完备的功能和实用水准,系统设置强调实用化;符合国内外有关规范的要求,使用简捷,操作方便。 ?先进性 系统在满足可靠性和实用性前提下保持了技术的先进性,特别符合计算机技术和网络通信技术最新发展潮流并且应用成熟。 ?安全可靠性 系统具有极高的安全性、可靠性。具有长期和稳定工作的能力。
精确定位和解决频点干扰问题的方法
上海贝尔阿尔卡特股份有限公司
ASB SSM-ISE 工程服务部
精确定位和解决频点干扰问题的方法
ASB 工程服务部 夏赟
一,概述
在常规的网络优化中, 我们一般通过实际路测来了解现有网络实时情况, 而路测中最常 见的问题就是频点干扰问题.现在我们用来定位和解决频点问题的方法主要有两种: 1,回放测试数据,使用 mapinfo 软件查看基站的地理位置和测试时的地理环境,利用 easyRNP 软件导入最新基站数据库文件来了解频点分布情况,以此判断可能存在的 频点干扰问题,然后提交 RNP 修改相关频点. 2,当在实测中未发现明显的频点干扰问题时,就对问题小区(C/I 值较低的频点所在小 区)进行 Abis 口信令跟踪,查看各载频下行质量,路径损耗等指标是否异常,当发 现异常后将问题频点提交给 RNP 修改相关频点. 但是相信许多同事都遇到过这样的问题: 当我们进行了上述操作后, 复测时发现效果不 是很好或者更糟,又或是现网的基站数据库不准或不全,如此一来对路测分析和 RNP 改频 造成了很大的困难,浪费了许多的精力,时间和财力往往结果不尽如人意.针对这个问题, 我所在的泰州项目组采用了一种更为行之有效的方法:现场使用手机扫频.
二,手机扫频主要测试方法
当使用常规方法无法有效解决频点干扰造成的质量问题时,我们将会采用现场手机扫 频,其主要方法如下: 1,首先让 RNP 挑选出与问题区域周边无干扰的频点,做成列表,当然这个工作可以也 可以自己利用 easyRNP 来完成. 2,路经问题路段,下车步行,如果无法不行(像大桥,高速公路等情况)就尽量减慢 车速,使用测试手机 OT290 进入工具栏—〉testtool—〉scanning—〉scanning RF. 3,缓慢的走过问题路段,不停观察早先准备的频点电平是否都持续较低(一般小于 -100) ,如果这些频点电平不稳定或较高则现场直接挑选电平持续较低(一般选择小 于-100) 的频点, 然后将这些频点一一记录, 再提交给 RNP 进行相关的调整和修改. 4,RNP 对问题小区的频点进行修改后,路测工程师对问题路段进行复测,如果测试结 果仍然不好就重复上述步骤,直至解决该问题.
ASB2005GSM001
移动通信经验交流汇编
1/4
LTE干扰处理
LTE干扰处理_ 王楠 一、TD-L TE干扰概述 1.TD-LTE频段分析 目前TD-LTE主要使用三个频段,F、D、E。
2.TD-LTE内外干扰分析 1)内部干扰 交叉时隙干扰:上下行时隙干扰 远距离同频干扰:站A和站B间距>GP传播距离 GPS失步:失步基站与周围基站上下行收发不一致,相互干扰 小区间同频干扰:同PCI同mod3 设备故障:RRU故障;天馈故障 2)外部干扰 同频干扰:杂散干扰,互调干扰,谐波干扰 异频干扰:阻塞干扰
3)干扰表现 上行底噪≥=105db ping包延时大于正常小区,或无法ping成功KPI:切换、接通、掉线 4)外部干扰分频段分析
①F频点干扰状况 ?DCS1800阻塞干扰:16~30dB底噪抬升,UL吞吐量损失严重,甚至无法建立连 接 ?DCS1800杂散干扰:5dB的底噪抬升, UL吞吐量损失约10% ?DCS1800互调干扰:8~16dB的底噪抬升, UL吞吐量损失超过30% ?GSM900谐波干扰:约5dB的底噪抬升 ?PHS杂散:一般情况下轻微干扰,严重时TD-S或TD-L无法建立连接
②E频段干扰状况 ?E频段和Wifi相隔30MHz,比较近,且Wifi不遵循3GPP协议,射频指标比较差?普通室分系统下,80dB的合路器基本可以消除干扰,两者频率越远,受到的影响 越小。 ?外挂情况下,空间隔离需1m以上 ③D频段干扰状况 ?从频谱状况来说,存有各运营商TD-LTE间的干扰、与雷达间、射频天文、北斗、 Wifi以及MMDS、Wimax间的干扰 ?MMDS和WiMAX对D频段的同频干扰,可使底噪抬升20dB以上,严重时更会 导致TD-LTE业务无法建立连接
TD-LTE上行干扰定位方法与排查指导手册(华为主设备)V01(DOC)
TD-LTE上行干扰定位方法与排查指导手册(华为主设备) V1.0 中国移动通信集团浙江有限公司 2013年12月
目录 第一章前言 (2) 第二章TD-LTE干扰小区筛选 (4) 第三章TD-LTE高干扰小区小区级和PRB级干扰轮询 (8) 3.1 TD-LTE高干扰小区的小区级干扰轮询 (8) 3.2 TD-LTE高干扰小区PRB级干扰轮询 (9) 第四章TD-LTE高干扰小区干扰分析和确认 (12) 4.1干扰分析其他准备工作 (12) 4.2阻塞干扰分析和确认 (12) 4.2.1阻塞干扰分析 (12) 4.2.2阻塞干扰确认 (14) 4.2.3 阻塞干扰整治 (14) 4.3互调干扰分析和确认 (15) 4.3.1互调干扰分析 (15) 4.3.2互调干扰确认 (17) 4.3.3 互调干扰整治 (18) 4.4杂散干扰分析和确认 (18) 4.4.1杂散干扰分析 (18) 4.4.2杂散干扰确认 (20) 4.4.3 杂散干扰整治 (20) 4.5互调干扰分析和确认 (21) 4.5.1互调干扰分析 (21) 4.5.2互调干扰确认 (23) 4.5.3 互调干扰整治 (23) 第五章项目管理相关经验 (24) 第六章附录 (24)
第一章前言 对于移动通信网络,保证业务质量的前提是使用干净的频谱,即该频段没有被其他系统使用或干扰。否则,会使受干扰系统的性能以及终端用户感受都会产生较大的负面影响。 随着4G LTE基站的逐步建设,目前已形成了2/3/4G基站共存的局面,系统间干扰的概率也大幅提升,在目前已建设的基站总,已发现大量的TD-LTE基站受到干扰。这些干扰主要包括2/3G小区对TD-LTE小区的阻塞、互调和杂散干扰,此外还有其他无线电设备,如PHS基站带来的外部同频干扰,具体如下表: 表1:TD-LTE各频段上行容易受到的干扰 从上表可以看出,由于F频段与干扰源系统的频率比较接近,因此F频段受到的干扰最多,本文侧重于实际操作,因此对于TD-LTE各频段所受干扰的分析具体可见中国移动研究院编撰的《TD-LTE系统间干扰排查与规避指导手册》,请见本文最后的附录1。 干扰对TD-LTE上行性能影响如下表:
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施 1 保证安装在砼灌注桩中钢筋笼位置的准确的方法1.1 桩基定位要准确和做好保护桩的工作在桩施工前,首先要进行桩基位置的定位,桩位的准确是保证桩基及钢筋笼子位置准确的前提条件,这里就涉及到工程施工中桩基的定位的问题,施工员的工作不仅要把桩基的位置找准,而且还要做好保护桩的工作,以备桩基施工钢筋定位等后期使用。施工现场都要出入一些大型工程车辆,一不注意就将事先布置好的保护桩碾压破坏掉,因此在做保护桩的时候,考虑的是不仅能方便恢复桩位点,而且还要尽量避免做好的保护桩遭到破坏。以上只是最基本的保证桩基位置准确的方法,更重要的是保证钢筋笼在桩基中混凝土位置的准确,下面进行一些简要的介绍。1. 2 护筒的质量、规格要满足施工的要求钻孔使用的护筒要圆而且制作护筒的钢板不能小于8 毫米(冲击钻施工时用的护筒的钢板不能小于12 毫米),护筒的直径应比桩基的直径大约200~300 毫米左右即可(冲击钻施工时护筒的直径要比上述值适当大些),埋设护筒时使其中心与桩位的中心重合,(规范中规定误差不能超过50 毫米,实际操作中要控制在20 毫米内),因为护筒是保证钢筋笼位置准确的第一个屏障,钢筋笼子要通过护筒安装进桩基钻孔内。另外护筒周围的回填土要尽量用不易渗水的粘土或煤矸石粉沫等回填,并要夯打结实。防止钻孔施工时外溢的泥浆渗过护筒周围的回填土,从而使护筒的位置倾斜或者发生位置改变。1. 3 做到钻杆中心和桩位中心重合埋好护筒后开始稳钻机,钻机的基础平
台要平整和结实,稳钻机时最重要的是保证钻杆的中心和桩位的中心要重合,并且要保证钻机的竖直,使钻机的磨盘中心和桩位的中心重合为止(通过吊线坠检查两者误差不宜超过10 毫米);冲击钻是使其钢丝绳中心和桩位的中心重合,经校和无误后才能制备泥浆准备钻孔。在钻孔的过程,通过保护桩恢复桩位中心,在钻孔时,要经常检查、校和钻杆的中心是否与桩位中心重合。1.4 壁杆与吊线坠相结合的方法来控制钢筋笼子的位置准确性为了保证安装后的钢筋笼能在钻孔灌注桩的中心位置,通常在安装钢筋笼之前,用长6m~8m,直径50~80mm 的钢管在一端焊接上?型的挂钩,制作4~6 个壁杆,均匀挂在护筒的四周后,才能开始安装钢筋笼子。在护筒的周围均匀安装4~6 个壁杆的目的是能使钢筋笼在壁杆的挤靠下,在钻孔内保持垂直,同时也能有效防止钢筋笼嵌入孔壁的泥里,设计上在钢筋笼周围上焊接几个长几十厘米长的]型的钢筋来做混凝土的保护层几乎是没有用的,经过实践检验,壁杆的作用基本上能控制住钢筋笼的位置,使其不会有产生太大的偏差,使钢筋笼子的位置基本上能满足规范规定的要求。精确的控制还要用吊线坠来实现,在安装完钢筋笼后,通过保护桩恢复桩位的中心点,然后抽孔内的泥浆,直到漏出钢筋笼的顶面,在钢筋笼的顶端挂十字线,用线坠来校和钢筋笼上挂的十字线中心与桩位的中心是否重合,否则用大锤、钢管敲打、撬动钢筋笼的吊筋使其中心与桩位的中心重合为止。但当钢筋笼的顶面至泥浆的上面距离较大时,抽泥浆的方法往往容易造成塌方,因此用吊线坠的方法就不再适用。
GPS干扰检测与定位技术综述
GNSS干扰检测与定位技术综述 摘要:当前,我国的新一代卫星导航系统正在建设中,为了满足导航战的应用需求,对干扰源的自主监测与定位是大势所趋。本文首先分析了导航战环境下干扰监测系统研制的必要性,然后分析了当前GNSS系统所采用的常用干扰检测方法(包括相关前干扰检测与相关后干扰检测)以及干扰源的定位方法(包括移动AOA定位、TDOA定位以及干扰监测网定位方法),并对各种方法优缺点进行了比较,最后通过上述分析,并结合我国的实际情况,对我国干扰监测与定位系统的研制提出了建议。 关键词:GNSS;干扰监测;干扰定位;AOA;TDOA Summarizing on interference detection and localization of Gnss system Abstract: Currently, as th e g lobal sate llite n avigation s ystem of our country is under bu ilding, for satisf ying the app lication requirement of “navigation war”, we must develop the technique of interference detection and localization. Firstly, the necessity of developing interference monitoring s ystem was anal yzed in the pap er. Th en s ome important commonl y used in terference detection m ethods includ ing pre-correlation and post-corr elation detection, fo llowing with th e interference sour ces localization methods including AOA, TDOA and network structure were presented and analyzed. Finally, taking the practical condition of our country into consideration, some constructive advices of developing interference monitoring system were presented. Key words: GNSS; interference detection; interference localization; AOA; TDOA 1 导航战环境下干扰监测与定位的必要性 “导航战”是继电子战、信息战之后提出的新的作战样式。导航战是指在战场环境下综合运用导航技术掌握主动权,并利用电子办法对抗敌方导航系统的工作,以及针对敌方对己方导航系统的干扰开展反对抗,有效提高己方的战斗力,有效掌握战场主动权。导航战的核心是有效依赖和借助卫星导航系统的介入,为军事行动和指挥提供精确的三维位置、速度、时间等重要信息,以确定明确的目标。通过以上定义可以看出,导航战主要包括进攻与防御两个方面:分别是导航干扰与抗干扰,也可看作是卫星导航的反使用与使用。 卫星导航信号具有固有的脆弱性,功率为1W的干扰机可以使85公里以内的C/A码接收机无法工作,干扰功率每增加6dB,有效干扰距离就增加1倍[19]。考虑到目前面临的各种直接和潜在的导航干扰威胁,为了满足我国导航战防御体系的需求,使我国的卫星导航系统能在战时发挥重要作用,建设导航信号的干扰监测系统具有不可质疑的必要性。随着我国全球导航系统建设步伐的日益加快,为了防止敌方对我系统的恶意干扰,干扰监测系统的研制工作也愈显紧迫。
如何实现人员精确定位
如何实现人员精确定位 ——基于WSN技术的第三代人员定位系统 作者:中国矿业大学教授华钢安徽烽讯电子科技公司金灏 井下人员定位系统示意图 随着我国对煤矿安全日益重视,监管力度不断加强,大中型煤矿和众多乡镇小煤矿均已大量装备了煤矿安全监控系统,有效地遏制了重大瓦斯煤尘爆炸事故的发生。 生产安全的核心是人的安全。煤矿迫切需要利用相应的矿井人员跟踪定位设备,全天候对煤矿入井人员进行实时自动跟踪和考勤,随时掌握每个员工在井下的位置及活动轨迹、全矿井下人员的位置分布情况以及井下人员位置。矿用人员定位系统是集井下人员考勤、跟踪定位、灾后急救、日常管理等于一体的综合性应用系统。这一科技成果的实现,将为煤炭企业的安全生产、日常管理以及事故急救带来可靠指挥依据。 实现人员跟踪定位 矿用人员定位跟踪系统以标示卡为基本采集单位,完成对下井者地理信息和工作信息的采集、存储、处理、显示和打印,同时可以对各种异常状态进行预警、报警。系统主要由标识卡、读卡器、人员检测分站、通信接口、服务器、打印机等组成。 从结构上划分,人员定位跟踪系统主要包括主站、分站和移动分站。主站模块既是系统的信息处理中心,又是用户的信息获取源。从各种总线传输汇总的数据,经过主站模块完成数据筛选、信息存储、异常处理后,与用户进行信息交流;分站模块包括各种基站、读卡器和标示卡,共同形成一个动态信息采集监控区,并通过一定的信息传送方式,将数据汇总至主站模块。 从功能上划分,人员定位跟踪系统基本功能包括实时数据采集与存储、井下人员的电子考勤、动态定位、地图管理、历史路径查询与显示、数据联网、报表生成,以及
报警提示井下人员进入危险区域及限制区域,矿难时提供井下人员搜救帮助等功能。 以WSN技术为核心 人员定位跟踪系统的核心主要涉及传感器及其组网技术与人员信息的地理化显示处理技术。特别是前者的升级换代,从根本上标志着人员定位跟踪系统的发展阶段;后者作为决策支持的主要工具,体现了系统智能化、专家化的程度。 传感器及其组网技术 在无线技术基础上的煤矿井下人员定位系统经历了三个主要阶段,前两个阶段都采用RFID技术。RFID的中文全称是无线射频识别技术,它利用无线电波对记录媒体进行读写。与其他识别技术相比,RFID技术具有防水、防磁、耐高温、使用寿命长、读取距离大、标签上数据可以加密、存储数据容量更大、存储信息更改自如等优点。但是这种技术的读卡器价格昂贵,如果要实现人员位置的密集跟踪,系统造价将难以承受。而人员检测与管理系统作为一个综合性系统,与安全监控系统具有同等重要性,若只实现小范围的人员检测,难以体现其价值,更难以发挥其应用前景。 随着现代传感器网络的发展,无线传感器网络(WSN)技术走向成熟,并在多个领域有成功应用。因此,基于WSN技术的第三代人员定位跟踪系统成为近年来的研究热点。WSN由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通信方式形成一个自组织的网络系统,其目的是协作地感知、采集和处理网络覆盖区域中被感知对象的信息,并发送给观察者。 WSN家族非常庞大,包含多个协议族。根据煤矿应用的特点,第三代人员定位跟踪系统不约而同地把研究的焦点取在Zigbee标准上。Zigbee是基于IEEE 802.15.4无线标准研制开发的关于组网、安全和应用软件等方面的技术标准。完整的Zigbee协议套件由高层应用规范、应用会聚层、网络层、数据链路层和物理层组成。 应用汇聚层是把不同的应用映射到Zigbee网络上,主要包括安全属性设置和多个业务数据流的汇聚等功能;网络层则可实现网络的自组织和自维护,从而降低了网络的维护成本。Zigbee技术具有低功耗、短时延、低速率、近距离、低成本、大容量、高安全性、免执照频段等特点,因此在短距离无线通信领域有着较大的优势。而煤矿巷道在空间上本身具有局限性,若采用基于Zigbee技术的低成本传感器密集分布,将为当前的井下人员跟踪带来质的飞跃。 人员信息的地理化显示技术 用户并不关心传感器网络采用何种类型,其主要的系统体验来源于人员地理信息的可视化效果。如何将井下人员信息直观地传达给用户,并在灾害过程中为决策者提供临场感,是人员定位跟踪系统面临的另一难题。 人员定位系统的未来