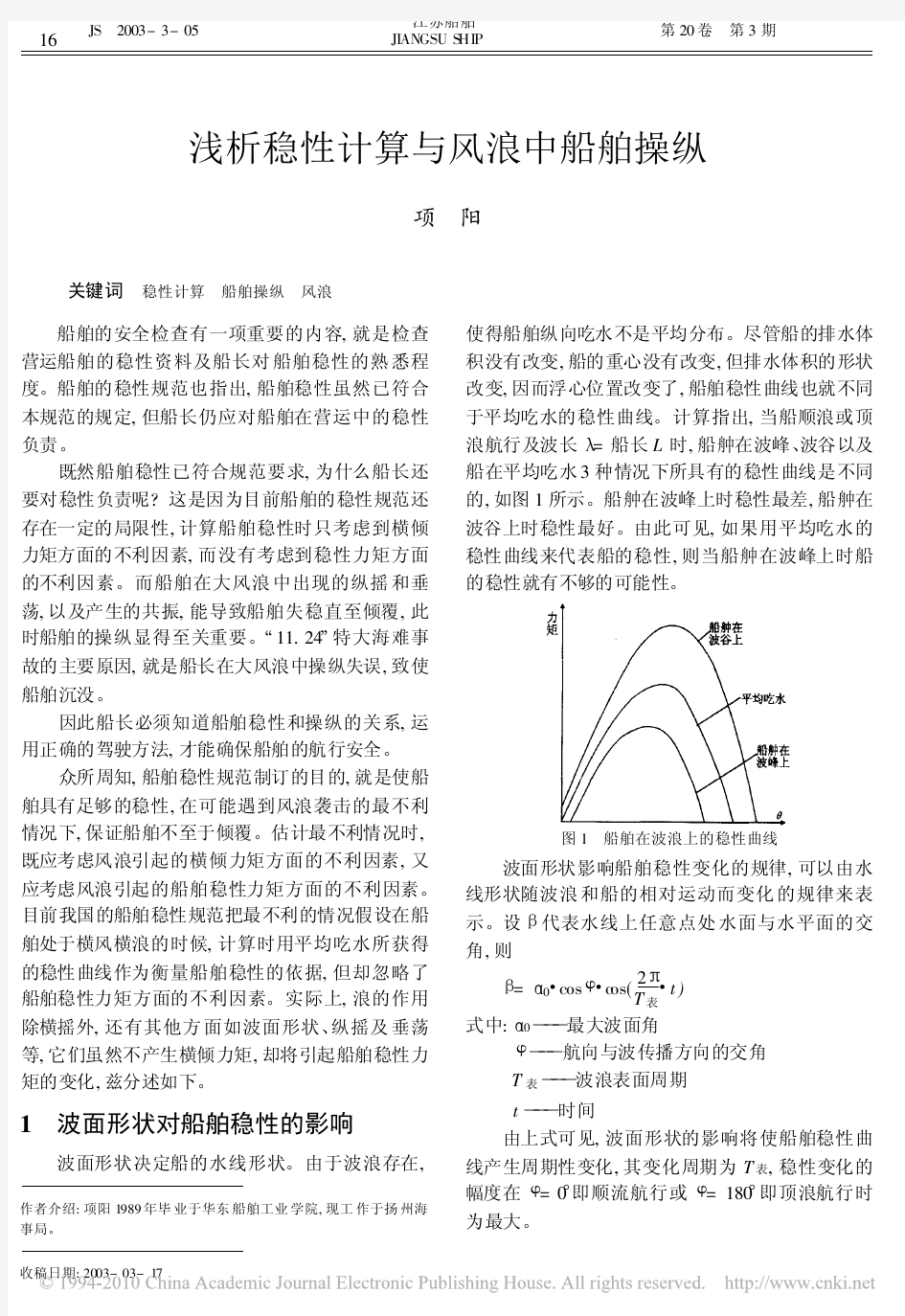
浅析稳性计算与风浪中船舶操纵

第六节 对船舶稳性的要求
第六节对船舶稳性的要求 1.某船舶的宽深比为1.8,稳性衡准数为1.2,按我国法定规则的规定,该船的极限静倾角均可适当减小()。 A.0.8° B.1.5° C.3° D.0° 2.我国《船舶与海上设施法定检验规则》对船舶稳性的要求应()。 A.开航时必须满足 B.航行途中必须满足 C.到港时必须满足 D.整个航程必须满足 3.根据《船舶与海上设施法定检验规则》,对国内航行普通货船完整稳性的基本要求,均应为()后的数值。 A.进行摇摆试验 B.经自由液面修正 C.计及横摇角影响 D.加一稳性安全系数 4.稳性衡准数是()的指标。 A.动稳性 B.初稳性 C.大倾角静稳性 D.纵稳性 5.极限静倾角是()的指标。 A.动稳性 B.初稳性 C.大倾角静稳性 D.纵稳性 是()的指标。 6.GZ 30o A.动稳性 B.初稳性 C.大倾角静稳性 D.纵稳性 7.GM是()的指标。 A.动稳性 B.初稳性 C.大倾角静稳性
D.纵稳性 8.当风压倾侧力矩等于最小倾覆力矩时,稳性衡准数()。 A.等于1 B.大于1 C.小于1 D.以上均有可能 9.《IMO稳性规则》中规定:船舶受稳定横风作用时的风压倾侧力矩可用公式 M W =P W A W Z W 来计算,其中Z W 是指()。 A.A W 的中心至水下侧面积中心的垂直距离 B.A W 的中心至船舶水线的垂直距离 C.A W 的中心至船舶吃水的一半处的垂直距离 D.A或C 10.当风压倾侧力矩小于最小倾覆力矩时,稳性衡准数()。 A.等于1 B.大于1 C.小于1 D.以上均有可能 11.根据《船舶与海上设施法定检验规则》对船舶完整稳性的要求,国内航行的普通货船,在各种装载状态下的稳性衡准数应()。 A.小于1 B.大于1 C.等于1 D.B+C 12.某船舶的宽深比为2.4,稳性衡准数为1.5,按我国法定规则的规定,该船的极限静倾角均可适当减小()。 A.5° B.4° C.3° D.2° 13.我国《船舶与海上设施法定检验规则》对下列()船舶既提出基本稳性衡准要求,又提出特殊衡准要求。 ①散粮船;②集装箱船;③杂货船;④拖轮;⑤油轮;⑥冷藏船;⑦矿石专用船。A.①②③④⑤⑥⑦ B.①②④⑤⑥ C.①②④⑥ D.①②④ 14.我国《海船法定检验技术规则》对国内航行船舶完整稳性的基本要求共有()
船舶操纵性总结
2010年度操纵性总结 1.船舶操纵性含义 船舶操纵性是指船舶借助其控制装置来改变或保持其运动速率、姿态和方向的性能。 2.良好的操纵性应具备哪些特性 具有良好操纵性的船舶,能够根据驾驶者的要求,既能方便、稳定地保持航向、航速,又能迅速地改变航向、航速,准确地执行各种机动任务。 3. 4.分析操舵后船舶在水平面运动特点。 船的重心G做变速曲线运动,同时船又绕重心G做变角速度转动,船的纵中剖面与航速之间有漂角。 5.漂角β的特性(随时间和沿船长的变化)。 船长:船尾处的速度和漂角为最大,向船首逐渐减小,至枢心P点处速度为最小且漂角减小至零,再向首则漂角和速度又逐渐增大,但漂角变为负值。 6. 7.作用在在船上的水动力是如何划分的。 船在实际流体中作非定常运动时所受的水动力,分为由于惯性引起的惯性类水动力和由于粘性引起的非惯性类水动力两类来考虑,并
忽略其相互影响。 8. 9.线性水动力导数的物理意义和几何意义。 物理意义:各线性水动力导数表示船舶在以u=u0运动的情况下,保持其它运动参数都不变,只改变某一个运动参数所引起船体所受水动力的改变与此运动参数的比值。 几何意义:各线性水动力导数表示相应于某一变化参数的受力(矩)曲线在原点处的斜率。 10.常见线性水动力导数的特点。 位置导数:(Yv,Nv)船以u和v做直线运动,有一漂角-β,船首部和尾部所受横向力方向相同,都是负的,所以合力Yv是较大的负值。而首尾部产生的横向力对z轴的力矩方向相反,由于粘性的影响,使尾部的横向力减小,所以Nv为不大的负值。所以,Yv<0, Nv<0。 控制导数:(Yδ,Nδ)舵角δ左正右负。当δ>0时,Y(δ)>0,N(δ)<0。(Z轴向下为正)所以Yδ>0,Nδ<0。 旋转导数:(Yr,Nr) 总横向力Yr数值很小,方向不定。Nr数值较大,方向为阻止船舶转动。所以,Nr<0。 11. 12. 13. 14.一阶K、T方程及K、T含义,可应用什么操纵性试验测得。 在操舵不是很频繁的情况下,船舶的首摇响应线性方程式可近似
船舶原理公式
船舶原理公式汇总 第一章 船型系数: 水线面系数C WP =A W /LB 中横剖面系数C M =A M /Bd 方形系数C B =排水体积/LBd 菱形系数C P =排水体积/A M L=排水体积/C M BdL=C B /CM 垂向菱形系数C VP =排水体积\A W d=排水体积/C WP LBd=C B /C WP 排水体积符号▽ 尺度比: 长宽比L/B :与船的快速性有关 船宽吃水比B/d:与船的稳性、快速性和航向稳定性有关 型深吃水比D/d :与船的稳性、抗沉性、船体的坚固性以及船体的容积有关 船长吃水比L/d :与船的回转性有关,比值越小,船越短小,回转越灵活 梯形法:A=?b a ydx A=l ?b ydx 0 =l(∑=n i yi 0 -(y 0+y 3)/2)注(y 0+y n )/2为首尾修正项 辛氏法:一法,A=1/3l(y 1+4y 2+y 3)二法,A=3l/8(y 1+3y 2+3y 3+y 4) 计算漂心X F =M oy /A W =? -2/2 /L L xydx /? -2 /2 /l l ydx 其中A W =2L δ∑yi ' M oy =2(L δ)2∑kiyi '所以X f =L δ∑kiyi '/∑yi ' 计算横剖面面积型心的垂向坐标Z a =M oy /A s =?d zydz 0 /?d ydz 0 其中横剖面面积As=2?d ydz 0 Moy=2?d zydz 0 又可以表达为As=2d δ∑yi '(注意首位修正) Moy=2(l δ)2∑kiyi '所以可以表达为za=d δ∑kiyi '/∑yi ' 第二章 浮心的计算dM yoz =x F A w d z dM xoy =zA w d z x F 为A w 的漂心纵向坐标 排水体积对中站面yoz 的静距M yoz =?d xfAwdz 0 浮心纵向坐标x B =M yoz /▽=? d xfAwdz 0 /?d Awdz 0 同理可以得排水体积对基平面xoy 的静距和浮心垂向坐标Mxoy=?d zAwdz 0 Zb=Mxoy/▽=?d zAwdz 0/?d Awdz 0 同理根据横剖面计算排水体积和浮心位置 dM yoz =x F A s d x dM xoy =z a A s d x 浮心纵向坐标Myoz=? -2/2 /l l xAsdx X B =Myoz/▽=? -2 /2 /l l xAsdx /? -2 /2 /l l Asdx
MSC.267_85__《2008年国际完整稳性规则》引言和A部分
《2008年国际完整稳性规则》引言和A部分 目录 引言 1 宗旨 2 定义 A部分-强制性衡准 第1章总则 1.1 适用范围 1.2 波浪中的动态稳性现象 第2章-总体衡准 2.1 总则 2.2 关于复原力臂曲线特性的衡准 2.3 强风和横摇衡准(气候衡准) 第3章-某些类型船舶的特殊衡准 3.1 客船 3.2 5,000载重吨及以上的油船 3.3 载运木材甲板货的货船 3.4 散装运输谷物的货船 3.5 高速船
引言 1 宗旨 1.1 本规则旨在提出强制性和建议性的稳性衡准及其他确保安全操作船舶的措施,最大限度地降低对这些船舶、船上人员以及环境构成的风险。本引言和规则的A部分涉及强制性衡准,B部分包含建议和附加的导则。 1.2 除非另行说明,本规则载有适用于长度为24 m及以上的以下类型船舶和其他海上运载工具: .1 货船; .2 运输木材甲板货物的货船; .3 客船; .4 渔船; .5 特种用途船舶; .6 近海供应船; .7 移动式近海钻井装置; .8 平底船;及 .9 甲板上装载集装箱的货船和集装箱船。 1.3 主管机关可以对新颖设计的船舶或本规则未作规定的船舶做出设计方面的补充要求。 2 定义 就本规则而言,下述定义适用。所用术语如未在本规则中定义,则经修订的《1974年安全公约》中的定义适用。 2.1 主管机关系指船舶有权悬挂其国旗的国家的政府。 2.2 客船系指经修正的《1974年安全公约》第I/2条所定义的载运12名以上旅客的船舶。 2.3 货船系指除客船、军事船舶和运兵船、非机动船、原始方式建造的木船、渔船和移动式近海钻井装置以外的任何船舶。 2.4 油船系指主要为了在其货物处所散装油类而建造或改造的船舶,包括混装船和《防污公约》附则II中定义化学品船(当其载运的货物全部或部分为散装油类时)。 2.4.1 混装船系指设计成既可散装运输油类又可散装运输固体货物的船舶 2.4.2 原油船系指从事原油运输的油船。
船舶稳性校核计算书
一、概述 本船为航行于内河B级航区的一条旅游船。现按照中华人民共和国海事局《内河船舶法定检验技术规则》(2004)第六篇对本船舶进行完整稳性计算。 二、主要参数 总长L OA13.40 m 垂线间长L PP13.00 m 型宽 B 3.10 m 型深 D 1.40 m 吃水 d 0.900 m 排水量?17.460 t 航区内河B航区 三、典型计算工况 1、空载出港 2、满载到港
五、受风面积A及中心高度Z 六、旅客集中一弦倾侧力矩L K L K=1 ? 1? n 5lb =0.030 m n lb =1.400<2.5,取 n lb =1.400 式中:C—系数,C=0.013lb N =0.009<0.013,取C=0.013 n—各活动处所的相当载客人数,按下式计算并取整数 n=N S bl=28.000 S—全船供乘客活动的总面积,m2,按下式计算: S=bl=20.000 m2 b—乘客可移动的横向最大距离,b=2.000 m; l—乘客可移动的横向最大距离,b=2.000 m。 七、全速回航倾侧力矩L V L V=0.045V m2 S KG?a2+a3F r d KN?m 式中:Fr—船边付氏数,F r=m 9.81L ; Ls—所核算状态下的船舶水线长,m; d—所核算状态下的船舶型吃水,m; ?—所核算状态下的船舶型排水量,m2; KG—所核算状态下的船舶重心至基线的垂向高,m; Vm—船舶最大航速,m/s;
a3—修正系数,按下式计算; a3=25F r?9 当a3<0,取a3=0;当a3>1时,取a3=1; a2—修正系数,按下式计算; a2=0.9(4.0?Bs/d) 当Bs/d<3.5时,取Bs/d=3.5;当Bs/d>4.0时,取Bs/d=4.0;
船舶操纵性与耐波性总结
船舶操纵性:是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变其航速、航向和位置的能力。航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。 回转性:表示船舶在一定舵角作用下作圆弧运动的性能。转首性:表示船舶应舵转首并迅速进入新的稳定状态的性能. 运动稳定性与机动性制约:小舵角下的航向保持性 、中舵角下的航向机动性 、大舵角下的紧急规避性 固定与运动坐标系的关系: 漂角:速度V 与OX 轴正方向的夹角β。舵角:舵与OX 轴之间的夹角δ。舵速角:重心瞬时速度矢量与O 0X 0轴之间的夹角ψ0。 线性水动力导数意义:船舶作匀速直线运动,在其他参数不变时,改变某一运动参数所引起的作用于船舶的水动力或矩对该参数的变化率。水动力导数:Xu= Yu= 通常可称对线速度分量u 的导数为线性速度导数.如:Xu 等。对横向速度分量v 的导数为位置导数,如:Yv 、Nv 等。对回转角速度r 的导数为旋转导数,如:Nr 、Yr 等。对各加速度分量和角加速度分量的导数为加速度导数Xu 。 ,对舵角δ的导数为控制导数,如:Y δ等。 稳定性:对处于定常运动状态的物体(或系统),若受到极小的外界干扰作用而偏离原定常运动状态;当干扰去除后,经过一定的过渡过程,看是否具有回复到原定常运动状态的能力。若能回复,则称原运动状态是稳定的。直线稳定性:船舶受到瞬时扰动以后,重心轨迹最终恢复成为一条直线,但航向发生了变化。方向稳定性:船舶受到的瞬时扰动消失以后,重心轨迹最终成为原航线平行的另一直线。位置稳定性:船舶受到瞬时扰动,当扰动消失以后,重心轨迹最终恢复成为与原来航线的延长线。 稳定衡准数:C=-Y V (mx G u 1-N r )+N V (mu 1-Y r );C>0 表示船舶在水平面的运动具有直线稳定性;C<0 则不具有直线稳定性。 影响航向稳定性的因素:(1)为改善其航向稳定性,应使Nr 、Yv 二者的负值增加,从C 的表达式可见,此二者之乘积的正值就越大,显然有利于改善稳定性。(2) Nv 对稳定性的影响较大。只要Nv 为正值,船舶就能保证航向稳定性 (3)若沿船纵向设置升力面(如鳍、舵等能产生升力的物体),则将其加在首或尾部都能使Nr 的负值增加,但若加在首部会使Nv 增加负值,而加在尾部会使Nv 变正,故升力面设置在尾部可使Nr 负值增加的同时又使Nv 值变正,故对航向稳定性的贡献比设置在首部要大。与几何形体的关系:增加船长可使Nr 负值增加,增加船舶纵中剖面的侧面积可使Nr 、Yv 的负值增加,增加Nv 的有效方法是,增加纵中剖面尾部侧面积,可采用增大呆木,安装尾鳍,使船产生尾倾等。 船舶回转性各参数:反横距:从船舶初始的直线航线至回转运动轨迹向反方向最大偏离处的距离为S1。正横距:从船舶初始直航线至船首转向90°时,船舶重心所在位置之间的距离为S2。该值越小,则回转性就越好。纵距:从转舵开始时刻船舶重心G 点所在的位置,至船首转向90°时船舶纵中剖面,沿原航行方向计量的距离S3。其值越大,表示船舶对初始时刻的操舵反应越迟钝战术直径:从船舶原来航线至船首转向180°时,船纵中剖面所在位置之间的距离DT 。其值越小,则回转性越好。定常回转直径:定常回转阶段船舶重心点圆形轨迹的直径D 进程R ′:自执行操舵点起至回转圈中心的纵向距离;R′=S3-D/2;它表示船舶对舵作用的应答性,R′越小则应答性越好 回转过程的三个阶段: 转舵阶段:指从开始转舵到舵转至规定角度δ0为止。运动特点:V 。 ≠0 ,r 。≠0 ,v=r=0;过渡阶段:指从转舵结束起到船舶进入定长回转运动为止。运动特点:V 。 、r 。 、V 、r 都不为零且随时间发生变化。 定长回转阶段:当作用于船体的力和力矩相平衡时,船舶就以一定的侧向速度V 和回转角速 度r 绕固定点作定长圆周运动。特点:V 。=r 。 =0,v 、r 为常数。 枢心点P :船舶回转过程中,在船上还存在一个横向速度分量为零的点,称为枢心点p 。枢心点是船舶纵中线上唯一的漂角为零的点;枢心点仅仅是因为船舶转向而存在的;船舶加速时,枢心点会向船舶运动的方向移动 。反操现象:是船舶不具有直线稳定性的一种特征,回转性与稳定性相矛盾。回转衡倾的原因:船舶回转过程中,船体上承受的侧向力其作用点高度各不相同,于是形成对ox 轴的倾侧力矩,产生回转横倾。 野本模型:T r 。+r 。 =K δ 其中 K 、T 为操纵性指数。用参数K 评估回转能力。大K 意味着回转性能好。用参数T 评估直线运动稳定性、初始回转能力和航线改变能力。小T 意味着好的直线运动稳定性、初始回转能力和航线改变能力。K= T= 希望船舶有大K 、小T (但相互矛盾)。T 的单位是S ,K 的单位是S -1 转首性指数p :表示操舵后,船舶行驶一倍船长时,由单位舵角引起的首相角改变量。 诺宾指数:若平>0.3则转首性满足要求。与船体惯性 回转阻尼 舵的回转力矩相关。 操纵性试验:分为模型试验和实船试验两种,模型试验又可分为自由自航模操纵性试验和约束模操纵性试验两种。船舶固有操纵性的试验方法:回转试验、回舵试验、零速启动回转试验、Z 试验、螺线与逆螺线试验、航向改变试验、制动试验和侧向推进装置试验。 回转试验: 1首先在预定的航线上保持船舶直航和稳定航速。 2在开始回转前约一个船长的航程范围内,测量船舶的初始参数,如:航速u 、初始航向角、初始舵角、螺旋桨的初始转速n 0等。 3以尽可能大的转舵速度将舵操至规定舵角δ0并把定舵轮。随后开始测量船舶运动参数随时间的变化,包括船舶的轨迹、航速、横倾角及螺旋桨的转速等。 4待首向角改变540°时,即可结束试验。 螺线试验:评价船舶的直线稳定性,在直航中给船舶以扰动,通过观察扰动去掉后船舶是否能够恢复直航来测定直线稳定性。 1.首先在预定航线上保持匀速直航,并在操舵前测出初始航速、舵角及螺旋桨转速。 2. 执行操舵,以尽可能快的速度将舵转至一舷规定的舵角(如右舷15°) 并保持舵角不变,使船进入回转运动,待回转角速度r 达到稳定值时,记录下r 和相应的舵角δ值。 3. 改变舵角值重复以上过程,测出定常r 值及相应δ值。舵角从右舷15°开始,并按下列次序改变:右15°→右10°→右5°→右3°→右1°→ 0°→左1°→左3°- 左5°→左10°→左15° Z 形操舵试验:测定船舶操舵响应的一种操纵性试验法。进行Z 形试验时,先使船以规定航速保持匀速直航,然后将舵转至右舷规定的舵角(如右舷10°) ,并保持之,则船即向右转向,当首向角达到某一规定的舵角值时(如右舷10°) 立即将舵向左转至与右舵角相等的左舵角(左舷10°) ,并保持之。当反向操舵后,船仍朝原方向继续转向,但向右转首角速度不断减小,直至消失。然后船舶应舵地再向左转向,当左转首向角与舵角值相同时,再向右操舵至前述之右舵角。该过程如此继续,到完成五次操舵为止。 航向改变试验是研究船舶在中等舵角时的转向性能的一种较简易而实用的试验方法。 回舵试验是船舶航向稳定性的定义试验。该试验方法实质为回转试验(或螺线试验)的延续 操纵性船模试验中必须满足的相似条件:1使自航船模与实船保持几何形状相似;2通常保持无因次速度、加速度参数相等,即u/V 、v/V 、rL/V 等相等;3在水动力相似方面,只满足傅汝德数Fn 相等,保证二者重力相似。 实际进行自航模试验时保持:船体几何形状相似;质量、重心位置及惯性矩相似;在决定模型尺度时要考虑临界雷诺数的要求;选择航速时满足傅汝德数相等;机动中保持舵角相等。 船舶固有操纵性指标:直接的判据:它是由自由自航试验直接测定的参数;间接的判据:如野本的K 、T 指数,诺宾的P 指数 操纵性衡准:1回转能力,由回转试验确定。船舶以左(右)350 舵角回转时,回转圈的纵距应
第四章 船舶稳性教案.
第四章船舶稳性 (一)课程导入 (二)新授课 第一节、稳性的基本概念 船舶平衡的3种状态: 1.船舶的平衡状态 船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。 (1)稳定平衡。如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。 (2)随遇平衡。如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。 (3)不稳定平衡。如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。 2.船舶平衡状态的判别 为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。 进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M
之上;船舶随遇平衡时,重心G 和稳心M 重合。因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。 处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。由图(a )可见,该稳性力矩大小为 s M GZ =?? 式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。 船舶稳性的分类: 船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船体能自行恢复到初始平衡状态的能力称为船舶稳性。 船舶稳性通常可按以下方法分类: 1.按船舶倾斜方向分类。可分为横稳性和纵稳性。横稳性指船舶绕纵向轴(x 轴)横倾时的稳性,纵稳性指船舶绕横向轴(y 轴)纵倾时的稳性。由于纵稳性力矩远大于横稳性力矩,故实际营运中不可能因纵稳性不足而导致船舶倾覆。 2.按倾角大小分类。可分为初稳性和大倾角稳性。初稳性(小倾角稳性)指船舶微倾时所具有的稳性,微倾在实际营运中将倾斜角扩大至10°~15°;大倾角稳性指当倾角大于10°~15°时的稳性。 3.按作用力矩的性质分类。可分为静稳性和动稳性。静稳性指船舶在倾斜过程中不计及角加速度和惯性矩时的稳性;动稳性指船舶在倾斜过程中计及角加速度和惯性矩时的稳性。 4.按船舱是否进水分类。可分成完整稳性和破舱稳性。船体在完整状态时的稳性称为完整稳性,而船体破舱进水后所具有的稳性则称为破舱稳性。 第一节 船舶初稳性 船舶初稳性的基本标准: 理论证明:船舶在微倾条件下,倾斜轴过初始水线面的面积中心即初始漂心F ;过初始漂心F 微倾后船舶排水体积不变;当排水量一定时,船舶的稳心M 点为一定点。船舶初稳性是以上述结论为前提进行研究和表述的。 船舶在小倾角条件下,稳性力矩M s 和稳性力臂GZ 可表示为 M s =ΔGM sin θ GZ =GM sin θ 式中:GM ───船舶重心与稳心间的垂直距离,称为初稳性高度(m ); θ───船舶横倾角(°)。 由上式可见,在排水量及倾角一定情况下,静稳性力矩大小取决于重心和稳心的相对位置,即取决于GM 大小。当M 点在G 点之上,GM 为正值,此时船舶具有稳性力矩并与GM 值成正比;当M 点在G 点之下,GM 为负值,此时船舶具有倾覆力矩亦与GM 值成正比;当M 点和G 点重合,GM 为零,此时稳性力矩为零。 由此分析可知,GM 可以作为衡量船舶初稳性大小的基本标志。欲使船舶具有稳性,必须使GM >0。 初稳性高度GM 的计算: 1.由装载排水量查取横稳心距基线高度KM ;
稳性的基本概念
第一节 稳性的基本概念 一、稳性概述 1. 概念:船舶稳性(Stability)是指船舶受外力作用发生倾斜,当外力消失后能够自行 回复到原来平衡位置的能力。 2. 船舶具有稳性的原因 1)造成船舶离开原来平衡位置的是倾斜力矩,它产生的原因有:风和浪的作用、 船上货物的移动、旅客集中于一舷、拖船的急牵、火炮的发射以及船舶回转等,其大小取决于这些外界条件。 2)使船舶回复到原来平衡位置的是复原力矩,其大小取决于排水量、重心和浮心 的相对位置等因素。 S M G Z =?? (9.81)kN m ? 式中: G Z :复原力臂,也称稳性力臂,重力和浮力作用线之间的距离。 ◎船舶是否具有稳性,取决于倾斜后重力和浮力的位置关系,而排水量一定时, 船舶浮心的变化规律是固定的(静水力资料),因此重心的位置是主观因素。 3. 横稳心(Metacenter)M : 船舶微倾前后浮力作用线的交点,其距基线的高度KM 可从船舶资料中查取。 4. 船舶的平衡状态 1)稳定平衡:G 在M 之下,倾斜后重力和浮力形成稳性力矩。 2)不稳定平衡:G 在M 之上,倾斜后重力和浮力形成倾覆力矩。 3)随遇平衡:G 与M 重合,倾斜后重力和浮力作用在同一垂线上,不产生力矩。 如下图所示
例如: 1)圆锥在桌面上的不同放置方法; 2)悬挂的圆盘 5. 船舶具有稳性的条件:初始状态为稳定平衡,这只是稳性的第一层含义;仅仅具 有稳性是不够的,还应有足够大的回复能力,使船舶不致倾覆,这是稳性的另一层含义。 6. 稳性大小和船舶航行的关系 1)稳性过大,船舶摇摆剧烈,造成人员不适、航海仪器使用不便、船体结构容易 受损、舱内货物容易移位以致危及船舶安全。 2)稳性过小,船舶抗倾覆能力较差,容易出现较大的倾角,回复缓慢,船舶长时 间斜置于水面,航行不力。 二、稳性的分类 1. 按船舶倾斜方向分为:横稳性、纵稳性 2. 按倾角大小分为:初稳性、大倾角稳性 3. 按作用力矩的性质分为:静稳性、动稳性 4. 按船舱是否进水分为:完整稳性、破舱稳性 三、初稳性 1. 初稳性假定条件: 1)船舶微倾前后水线面的交线过原水线面的漂心F; 2)浮心移动轨迹为圆弧段,圆心为定点M(稳心),半径为BM(稳心半径)。2.初稳性的基本计算 初稳性方程式:M R = ??GM?sinθ GM = KM - KG
第四章 船舶稳性
第四章船舶稳性 第一节船舶稳性的基本概念 (一)船舶平衡的3种状态 1、稳定平衡 >0 G点在M点之下,GM>0,M R 2、随遇平衡 G点与M点重合,GM=0,M =0 R 3、不稳定平衡 <0 G点在M点之上,GM<0,M R (二)稳性的定义 船舶稳性是指船舶受给定的外力作用后发生倾侧而不致倾覆,当外力消失后仍能回复到原来的平衡位置的能力。 (三)稳性分类 分类方法: 按倾斜方向、倾角大小、倾斜力矩性质、船舱是否进水 ┏破舱稳性 稳性┫┏初稳性(小倾角稳性) ┃┏横稳性┫┏静稳性 ┗完整稳性┫┗大倾角稳性┫ ┗纵稳性┗动稳性 其中,倾角小于等于10-15度称为小倾角,否则称为大倾角。倾斜力矩性质指静力或动力,或者说有无角速度、角加速度。
第二节船舶初稳性(1) (一)船舶初稳性的基本标志 1.稳心M 与稳心距基线高度KM 船舶小倾角横倾前、后其浮力作用线交点称为横稳心,简称稳心。 稳心M距基线的垂向坐标称为稳心距基线高度。 2.初稳性的衡准指标 稳心M至重心G的垂距称为初稳性高度GM。 初稳性高度GM是衡准船舶是否具有初稳性的指标。初稳性高度大于零,即船舶重心在稳心之下,船舶就有初稳性。 3.初稳性中的假设(对于任一给定的吃水或排水量) (1)小倾角横倾(微倾); (2)在微倾过程中稳心M和重心G的位置固定不变; (3)在微倾过程中浮心B的移动轨迹是一段以稳心为圆心的圆弧; (4)在微倾过程中倾斜轴过漂心。 (二)初稳性高度GM的表达式 GM=KB+BM-KG=KM-KG
第二节 船舶初稳性(2) (三) 初稳性高度的求取 1、 KM 可在静水力曲线图、静水力参数表或载重表中查取。 2、 KG 的计算 式中,P i —— 组成船舶总重量(含空船重量等)的第i 项载荷,t Z i —— 载荷P i 的重心距基线高度,m 3、Z i 确定 (1)舱容曲线图表查取法 船舶资料中通常有各个货舱和液舱的舱容曲线图或数据表,利用舱容曲线图表,可方便确定舱内散货或液货的重心高度Z i ,方法如下: i )对于匀质散货或液货,已知货堆表面距基线高度,在图中左纵轴上对应点做水平线交舱容中心距基线高度曲线得B 点,过B 点做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。 ii )对于积载因素相近、合理积载的件杂货,根据所装货物的体积,在下横轴找到相应点向上做垂线,交舱容曲线得A 点,过A 点做水平线交舱容中心距基线高度曲线得B 点,过B 点向上做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。 ) 2.3()m (Z P KG i i ? *∑ =
干散货船稳性安全探析
第10卷 第7期 中 国 水 运 Vol.10 No.7 2010年 7月 China Water Transport July 2010 收稿日期:2010-05-03 作者简介:孙永煜(1971-),男,烟台海员职业中等专业学校工程师。 干散货船稳性安全探析 孙永煜 (烟台海员职业中等专业学校,山东 烟台 264000) 摘 要:近年来,因为稳性问题导致多艘干散货船发生事故,对此,笔者分析了船舶稳性的要求,研究了即将强制实施的IMSBC Code,结合自己的经验提出了应对措施。 关键词:船舶稳性;易流态化;安全;平舱 中图分类号:U698 文献标识码:A 文章编号:1006-7973(2010)07-0004-02 一、前言 自上世纪七八十年代以来,干散货船得到了迅猛发展,据Drewry 统计,目前干散货船队规模已达到4.5亿载重吨左右。虽然近几年国际航运市场低迷,船队运力闲置情况较严重,但据辛浦森航运咨询有限公司(SSY)研究中心主管John Kearsey 预测,依靠中国和印度等新兴市场的贸易大幅增加和发达国家经济的缓慢复苏,2010年的干散货海运贸易仍将呈现超过8%的增幅。的确,今年第一季度全球干散货船队运力规模净增长1,700万吨,而且还有持续上升的趋势。 干散货船兴盛的背后,也让我们看到了一些不谐现象:刚刚过去的4月份,一艘由辽宁锦州驶往江苏常熟的“上源9”货轮在大连海域沉没,事故原因就是满载炼钢铁矿砂的干散货船“上源9”因货物位置发生偏移,船员调整压载舱过程中,造成船偏向另一侧,从而导致沉船;3月份,满载黄沙的“豫信货2699”轮在38°23′N,118°33′E 遇险沉没…… 海损事故的不断发生,让我们不得不深思干散货船的安全问题。从今年刚发生的这几起案例来看,稳性是造成事故的主要元凶。我们再看看前几年发生的干散货船海难事故,看看在港外沉没但却仅有一人生还的“铭扬洲178”轮,也会同样感觉到稳性是影响散货船安全的重要原因。 二、船舶稳性要求 船舶稳性是指受外力矩作用,船舶发生倾侧而不致倾覆,当外力矩作用消失后,仍能回复到原平衡位置的能力。船舶的稳性可分为静稳性、动稳性、初稳性和大倾角稳性、完整稳性和破损稳性,营运中的船舶必须满足船舶稳性要求。鉴于稳性对船舶安全的重要性,IMO 海上安全委员会(MSC)第85次会议于2008年12月4日通过了MSC.267(85)决议——《通过<2008年国际完整稳性规则>》,根据随后通过的1974年海上人命安全公约(SOLAS)修正案,《2008年国际完整稳性规则》(简称《2008年IS 规则》)的引言和A 部分规定成为强制性要求,将于2010年7月1日正式生效。 《2008年IS 规则》的篇章结构为: 前言(Premeale)——回顾; 引言(Introduction)——目的与定义; PART A——强制性的衡准; PARTB——适用于某些类型船舶的建议和附加指南。 《2008年IS 规则》PART A 部分第二章对船长为24m 及以上的货船和客船提出了稳性最低衡准要求,第三章对某些其他类型船舶也提出了特殊衡准要求。对于干散货船装运谷物时,由于谷物的特性对船舶稳性的不利影响,除应满足对所有货船的稳性要求外,还应满足: 经自由液面修正后的初稳性高度应大于或等于0.30m。 由于谷物移动而引起的船舶横倾角应小于或等于12度,1994年1月1日以后建造的船舶应同时满足横倾角小于或等于12度及甲板边缘浸水角。 船舶剩余动稳性值应大于或等于0.075m.rad。 上述衡准要求是满足稳性安全的最低限,一般的,各海运公司为确保航运安全,在IMO 规定的最低限值的基础上,还会提出自己的强制要求。 三、干散货船稳性安全 理论上,船舶满足了《2008年IS 规则》,就能保证稳性安全,但是,从大量的海损事故看,干散货船事故往往是出发时能够满足稳性要求,而在航却发生了问题。2005年12月21日,满载陶土的“铭扬洲178”沉没,事后调查时没有获得散装陶土得到有效平舱处理的证据,经分析,散装陶土在船舶过度横摇时产生移位,从而导致在航船舶倾斜丧失稳性而发生事故。一般说来,在航干散货船极易因货物流态化或平舱不当、货物移位而影响稳性。 1.货物流态化影响船舶稳性 易流态化货物(Cargoes which may liquefy),在《国际海运固体散货安全操作规则》(IMSBC Code)中归为A 类散货,该类货物一般由较细颗粒状的混合物构成,包括精矿、煤粉或类似物理性质的货物。这类货物在海运时的潜在危险是:当它们的含水量超过其“适运水分限量”(TML—Transportable Moisture Limit)时,由于大量含水,在航行中因船舶的颠簸、振动,其水分逐渐渗出,表面形成可流动状态。表层流态化的货物在风浪中摇摆时会流向一舷,而船回摇时却不能完全流回,如此反复,将会使船舶逐渐倾斜
船舶稳性和吃水差计算
船舶稳性和吃水差计算 Ship stability and trim calculations 1.总则General rules 保证船舶稳性和强度在任何时候都保持在船级社认可的稳性计算书规定范围内,防止因受载不当,产生应力集中造成船体结构永久性变形或损伤。Ensure stability and strength of the ship at all times to maintain stability within stability calculations approved by the classification societies in order to prevent due to load improperly resulting in stress concentration which will cause the ship structure permanent deformation or subversion. 2.适用范围Sphere of application 公司所属和代管船舶的稳性、强度要求 To satisfy the requirement of company owned and managed ships stability and strength 3.责任Responsibility 3.1.大副根据本船《装载手册》或《稳性计算手册》等法定装载资料,负责合理配载或对 相关部门提供的预配方案进行核算,确保船舶稳性及强度处于安全允许值范围。Based on the ship "loading manual" or "stability calculations manual" and other legal loading information, the chief officer is responsible for making reasonable stowage plan or adjust accounts of the pre plan from relevant departments to ensure stability and strength of the ship in a safe range of allowed values. 3.2.船长负责审批大副确认的配载方案和稳性计算。 The captain is responsible for checking and approving the stowage plan and stability calculation that has been confirmed by chief officer. 4.实施步骤Implementation steps 4.1.每次装货前,大副必须对相关部门提供的预配方案仔细核算,报船长审核签字后才可 实施。 Every time before loading, the chief officer should carefully adjust accounts of the pre stowage plan from the relevant department and transfer it to captain, the stowage plan should be implemented after captain reviewing and signing. 4.2.船舶装货前后大副应认真进行船舶稳性及强度计算校核,包括装货前的预算和装货后 的船舶局部强度和应力状况的核算,货品发生变化后,要重新进行计算。计算时充分考虑自由液面,油水消耗,污水变化及甲板结冰等对船舶稳性产生的影响,确保船舶在离港、航行、抵港的过程中均满足要求。 Every time before loading, the chief officer should carefully calculate and check the ship’s stability and strength, including calculation before loading and the partial strength and stress condition of the ship after loading, if cargos changes, the stability and strength should be re-calculated. When calculating, should fully consider the free surface, water and oil consumption, sewage and water ice on deck and other changes on the impact of ship stability, to ensure that the ship departure, navigating and arriving at port in the process can meet the requirements. 4.3.开航前,大副应完成初稳性高度和强度的计算。稳性计算结果应满足: Before departure, the chief officer should complete the calculations of height of initial stability and strength. Stability calculation results should be satisfied as below: hc - ⊿h > hL 式中:hc:计算的初稳性高度The calculating height of initial stability ⊿h:自由液面修正值Free surface correction value hL:临界初稳性高度The critical height of initial stability 船舶静水力弯矩和剪力以及局部强度不得超过允许值。 Hydrostatic moment of force, shear force and partial strength of the ship can not to exceed the allowable values. 4.4.大副要将每航次的稳性计算资料包括积载图留存,并将稳性计算中的重要内容摘录记 在航海日志中,报船长审核确认签字。 The chief officer should preserve such documents including stability calculation information and stowage plan, and records the important contents of the stability calculation into the log, which shall be reported to captain to verify and sign.
船舶操纵性总结
哈尔滨工程大学船舶操纵性总结 1.船舶操纵性含义:P1 2.良好的操纵性应具备哪些特性 具有良好操纵性的船舶,能够根据驾驶者的要求,既能方便、稳定地保持航向、航速,又能迅速地改变航向、航速,准确地执行各种机动任务。 3.对于船舶的水平面运动,绘制固定坐标系和运动坐标系。 4.分析操舵后船舶在水平面运动特点。 5.漂角β的特性(随时间和沿船长的变化)。 6.坐标原点在船的重心处时,船舶的运动方程的推导。 7.作用在在船上的水动力是如何划分的。 8.粘性水动力方程线性展开式及无因次化。 9.线性水动力导数的物理意义和几何意义。
物理意义:各线性水动力导数表示船舶在以u=u0运动的情况下,保持其它参数都不变,只改变某一个运动参数所引起船体所受水动力的改变与此运动参数的比值。 几何意义:各线性水动力导数表示相应于某一变化参数的受力(矩)曲线在原点处的斜率。 10.常见线性水动力导数的特点。 11.船舶操纵水平面运动的线性方程组推导及无因次化。 12.写出MMG方程中非线性水动力的三种表达式。 13.首摇响应二阶线性K-T方程推导。 14.一阶K、T方程及K、T含义,可应用什么操纵性试验测得。 15.画图说明船舶在作直线航行时(舵角δ=0),若受到某种扰动后, 其重心运动轨迹的四种可能情况,并说明三种稳定性之间的关系。 16.影响稳定性的因素有哪些? 17.船舶回转过程的三个阶段及船舶在各个过程运动特点(速度、加 速度信息) 18.船舶回转运动主要特征参数。 19.影响定常回转直径的5个因素是什么? 20.推导船舶定常回转时横倾角的确定公式。 21.按照操舵规律由线性响应方程求解舶的回转角速度和艏向角。 22.如何获得船舶的水动力导数? 可以通过理论数值计算、经验公式估算和拘束模型的水动力试验三种方法来获得船舶的水动力导数。
船舶操纵专业英语
船舶操纵专业英语100个单词 1.船舶操纵ship handling 2.船舶操纵性能ship maneuverability 3.定常旋回steady turning . 4.进距advance 5.横距transfer 6.旋回初径tactical diameter 7.旋回直径final diameter 8.滞距reach 9.反移量kick 10.漂角drift angle 11.转心pivoting point 12.横倾list 13.方形系数block coefficient 14.舵面积比rudder area ratio 15.操纵性指数maneuverability indices 16.追随性指数turning lag index 17.旋回性指数turning ability index 18.新航向距distance to new course 19.静航向稳定性statical course stability 20.动航向稳定性dynamical course stability 21.船舶保向性course keeping ability 22.船舶惯性inertia effect 23.紧急停船距离crash stopping distance 24.最短停船距离shortest stopping distance 25.制动纵距head reach 26.制动横距lateral deviation 27.蛇航制动法zig zag stop manoeuvre 28.旋回试验turning test 29.螺旋试验spiral test 30.停船试验stopping test 31.操纵性试验manoeuvring test 32.正螺旋试验direct spiral test 33.逆螺旋试验reverse spiral test 34.固定螺距螺旋桨fixed pitch propeller 35.可变螺距螺旋桨controllable pitch propeller 36.阻力resistance 37.摩擦阻力frictional resistance 38.兴波阻力wave resistance 39.剩余阻力residual resistance 40.涡流阻力eddy-making resistance 41.污底阻力fouling resistance 42.附体阻力appendage resistance 43.空气阻力air resistance 44.汹涛阻力rough water resistance 45.推力thrust 46.吸入流suction current 47.排出流discharge current 48.转距torque 49.滑失slip 50.滑失比slip ratio 51.机器功率machinery horse power 52.收到功率delivered horse power 53.有效功率effective horse power 54.舵力rudder force 55.一字锚flying moor 56.伴流wake 57.舵效steerage 58.首缆head line 59.首横缆fore breast 60.首倒缆fore spring 61.尾缆stern line 62.尾横缆aft breast 63.尾倒缆aft spring 64.吊拖leading ahead 65.顶推pushing 66.傍拖towing alongside 67.尾找风stern to wind 68.受限水域confined water 69.浅水效应shallow water effect 70.岸壁效应bank effect 71.首下沉bow sinkage 72.尾下沉stern sinkage 73.岸吸suction 74.岸推repulsion 75.富余水深under keel clearance 76.船间效应interaction 77.海上船速sea speed 78.备车速度stand by speed 79.串视线transit line 80.墩底striking the bottom 81.单锚泊riding at single anchor 82.八字锚open mooring