旋转变压器在控制系统中的应用
旋转变压器在控制系统中的应用
王炳星
(扬州大学能源与动力工程学院,江苏扬州 225000)
摘要:本文简单介绍了旋转变压器的工作原理,之后就几种典型的旋转变压器在工业控制系统中的应用作了简单介绍,重点介绍了旋转变压器及转换器在电动轨道车辆中的应用,设计了AD2S1200与旋转变压器和TMS320F2812之间的接口电路,针对实际应用中出现的问题,重点阐述了转子位置信号的数字处理方法。
关键词:旋转变压器;DSP;伺服系统;TMS320F2812
Application of Resolver in Control System
Domintracy Wang
(SEPE Yangzhou University,Yangzhou Jiangsu 225000,China) Abstract: In this paper, the principle of resolver is briefly introduced. Then some typical applications of typical resolvers in industrial control system were introduced, espically the application of resolver in electric trial vehicle. The interface circuit for RDC and resolver and that for AD2S1200 and TMS320F2812 were designed. Finally methods of processing position signals were presented emphatically aimed at problems in application.
Key Words: Resolver; DSP; Servo System; TMS320F2812
前言
旋转变压器(Resolver)简称旋变,又称作解算器。由于结构简单,坚固耐用,抗干扰性强,能够适应各种恶劣的条件,因此广泛应用在伺服控制系统中。旋转变压器常在自动控制系统中作解算元件,可进行矢量求解、坐标变换、加减乘除运算、微分积分运算,也可在角度传输系统中作自整角机使用。
用于解算装置中的旋转变压器,分为以下四种基本型式:
①正余弦旋转变压器;②线性旋转变压器;③比例式旋转变压器;④特殊函数旋转变压器。本文主要介绍线性旋转变压器的应用。
感应移相器是一种输出电压幅值恒定、而相位角与转子转角成线性函数关系的交流控制电机。它的结构形式和正余弦旋转变压器相同。实际上,它是旋转变压器的一种特殊工作方式。
1 旋转变压器的工作原理
旋转变压器有旋变发送机和旋变变压器之分,作为旋变发送机它的励磁绕
组是由单相电压供电,电压可以写为:
11()sin m U t U t ω= (1.1)
其中,1m U —励磁电压的幅值,ω—励磁电压的角频率。励磁绕组的励磁电流产生的交变磁通,在次级输出绕组中感生出电动势。当转子转动时,由于励磁绕组和次级输出绕组的相对位置发生变化,因而次级输出绕组感生的电动势也发生变化。又由于次级输出的两相绕组在空间成正交的90°电角度,因而两相输出电压如下式所示:
22()sin()sin Fs Fm F U t U t ωαθ=+ (1.2) 22()sin()cos Fc Fm F U t U t ωαθ=+ (1.3)
其中,U 2Fs —正弦相的输出电压,U 2Fc —余弦相的输出电压,U 2Fm —次级输出电压的幅值;αF —励磁方和次级输出方电压之间的相位角;θ—发送机转子的转角。可以看出,励磁方和输出方的电压是同频率的,但存在着相位差。正弦相和余弦相在电的时间相位上是同相的,但幅值彼此随转角分别作正弦和余弦函数变化。
2 旋转变压器在控制系统中的应用
2.1 旋转变压器在伺服系统中的应用
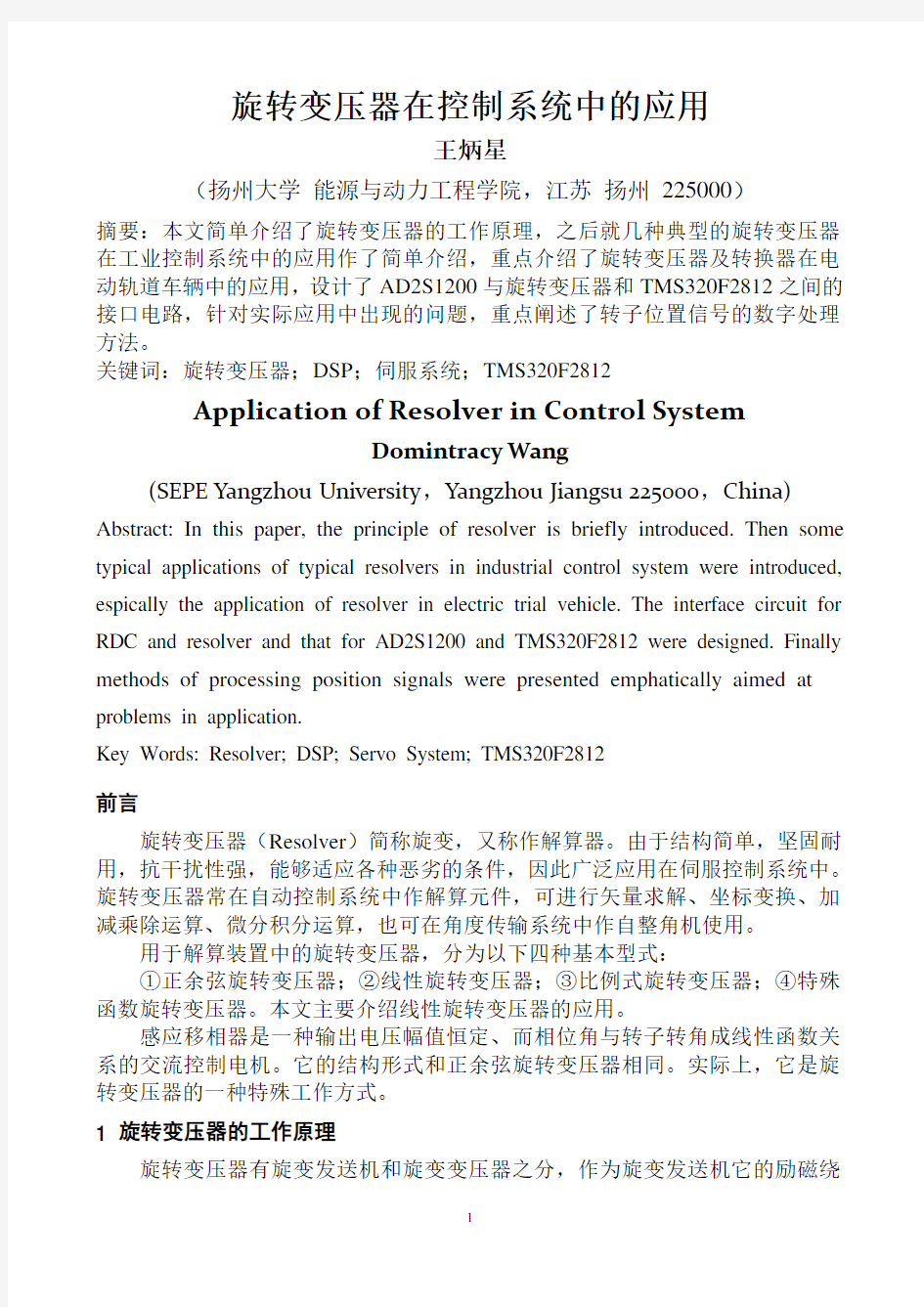
图1为某伺服系统的原理框图,该系统为四框架稳定系统,每一个框架都安装有角位置解算装置—旋转变压器,对系统的内外方位,俯仰四路角度信息进行解算,获得角度位置信息,其直接输出量为角位移量。内电机控制内框架转动的同时,内解算器测量内外框架的位移差,CPU 采集该值,转化为系统所需的数字信号,CPU 的主要作用是接收各通道的角度数字信号,根据相应的耦合算法,获取角度位置信息,通过角度换算后作为外位置控制器的输入,外位置控制器由软件实现,其控制量通过D/A 转换后输入外测速回路,对外电机实施控制,通过传动装置实现外框架的转动,从而精确有效的控制伺服系统的运动。
图1 某伺服系统原理框图
2.2 感应移相器在雷达脉冲测距系统中的应用
雷达脉冲测距系统原理是由发射机发出的探测脉冲遇到目标后形成反射波,再通过雷达接收机接收。显然,知道了测量电波从发出到返回所用的时间t ,便可测定到目标的距离s ,即: 12
s ct = (1.4) 为了能精确测定雷达与目标之间的距离值,通常采用顺序测距法。通过在精测距管的水平板上加一定的正弦电压进行扫描,若显示一次扫描的时间为6.67s μ,即正弦扫描电压的半个周期,则脉冲经过的距离为1km ,如图2所示。
图2 精测距管中用正弦扫描电压来量测距离 图3 用感应移相器使正弦扫描电压产生相位移
进行测距的原理图
正弦扫描电压的移相是通过感应移相器来完成的,它和雷达的距离操纵盘同轴。雷达观测员在测距时,转动距离操纵盘,移相器转子也随之偏转,并使正弦扫描电压产生相位移,从而使反射波的光点处于精测距管的准线位置,达到测距的目的。
设正弦扫描电压的周期为T ,当正弦波扫描电压移?相角时,与此相对应的距离值为:
'224c cT s T ??ππ
== (1.5) 在顺序测距法中,精测距管是通过量测感应移相器所产生的相位移,确定扫描电压在一个周期中的时差,并计算出几十米的目标距离。与正弦扫描电压周期成整数倍的时差nT 以及相对应的整公里的距离,可在粗测距管的距离操纵盘上直接读出。两者之和为目标的全距。
2.3 旋转变压器及转换器在电动轨道车辆中的应用
永磁同步电动机矢量控制调速系统中,需要实时检测转子位置,以实现转矩、速度及位置的闭环控制。常用的位置检测传感器有光电编码器和旋转变压器。光电编码器抗冲击性较差,而旋转变压器结构简单,更能适应抗冲击的要
求。因此,在抗震性能要求较高的场合,如永磁同步电动机牵引的轨道车辆中,多使用旋转变压器。
另一方面,旋转变压器需要外加励磁信号作为输入信号,同时其输出为两路正交的模拟信号,因而必须通过模数转换及运算得到对应位置的数字信号,方可输入到控制芯片。
本系统使用AD公司的数字转换(RDC)芯片AD2S1200完成旋转变压器励磁信号的产生及输出信号至数字式绝对位置信号的转换,同时采用TI公司TMS320F2812型数字信号处理器作为调速系统的核心控制芯片,共同实现转子位置检测及调速系统控制。实验表明该方案可靠易行,具有较好的控制效果。
2.3.1 数字转换器(RDC)的接口电路设计
图4 旋转变压器与AD2S1200接口电路原理图
AD2S1200的引脚EXC与EXC输出交流励磁信号,励磁信号经过一级反相放大及一级跟随电路驱动,作为旋转变压器的激励信号。该信号的频率可通过引脚FS1和FS2的电平配置。在图4所示的电路中励磁信号频率设置为10kHz。旋转变压器的输出是两路正交的sin信号和cos信号,分别引入AD2S1200的SIN-SINLO端口和COS-COSLO端口。AD2S1200负责将两路模拟信号转换成数字式绝对位置信号,输出到数据总线。
2.3.2 AD2S1200与TMS320F2812接口电路
图5 AD2S1200与TMS320F2812接口电路原理图
AD2S1200有三种模式输出数字信号:并行模式、串行模式及增量编码器模式。本系统采用并行模式实现位置信号获取,如图4所示,充分发挥并行输出模式速度快、实时性好的优势。具体地,AD2S1200将旋转变压器输出的模拟信号转换为12位数字信号,利用电平转换芯片74LVT16245将AD2S1200输出信号5V电平转换成DSP的3.3V电平标准,并与系统数据总线相连。TMS320F2812通过读取该信号获得转子的实际位置。接口电路原理图如图5所示。
2.3.3 转子位置信号处理
AD2S1200输出的数字信号表示电机转子在机械角度一周内的位置,其数值范围:0x000~0xFFF。这里规定转子逆时针旋转,转速数值为正数;反之为负数。在相邻两个PWM信号周期中DSP读取的位置数值可能会位于零位置的两侧。如图6所示,当前及上一PWM信号周期位置对应数值分别为1和4095。针对转子位置过零情况,通过设置门限差值的方法进行处理。
图6 转子位置过零示意图
本系统采用中值滤波结合限幅补偿的方法对转子位置进行处理。以转子逆时针方向旋转为例,规定:转速范围200~750r/min为电机高速运行区段,0~200r/min为低速运行区段。软件处理算法如下:
图7 转子位置软件处理流程图
在电动轨道车辆调速系统中,使用旋转变压器作为转子位置传感器,数字转换芯AD2S1200及其接口电路配合旋转变压器完成信号解调,通过对转子位置数据进行软件处理,实现了转子位置的有效测量。
参考文献
[1] 杨渝钦. 控制电机[M]. 北京: 机械工业出版社(第二版), 2010.
[2] 任高辉, 潘宏侠. 旋转变压器在伺服稳定系统中的应用[J]. 机电技术, 2011(2): 58-63
[3] 曾重, 骆光照, 赵君. 旋转变压器及转换器在电动轨道车辆中的应用 [J]. 微特电机, 2008(12): 34-39
[4] 孟凡涛. 全数字交流伺服系统中旋转变压器信号的处理[J]. 电力电子技术, 2002(2): 51.
[5] 曲家骐, 王季秩. 伺服控制系统中的传感器[M]. 北京: 机械工业出版社, 2001.
第四章旋转变压器
第四章 旋转变压器 工作原理:一、二次绕组的电磁感应耦合程度由转子的转角决定。当旋转变压器的一次侧外施单相交流电压励磁时,二次侧的输出电压将与转子转角严格保持某种函数关系。 第一节 旋转变压器的结构特点和分类 结构: 旋转变压器的典型结构由定子和转子两部分构成。 铁心:高磁导率的铁镍软磁合金片或硅钢片经冲制、绝缘、叠装而成。定、转子之间的气隙是均匀的,绕组:两个轴线在空间互相垂直的分布绕组。 转子绕组引出线和滑环相接,滑环应有四个,固定在转轴的一端, 分类: 按照输出电压和转子转角的函数关系来分: 1) 正余弦旋转变压器(代号XZ) 2) 线性旋转变压器(代号XX) 3) 比例式旋转变压器(代号XL) 4) 特殊函数旋转变压器(正切函数、倒数函数、圆函数、对数函数等) 按照电机极对数多少来分:单极对和多极对(可以提高系统的精度)。 按照有无电刷与滑环间的滑动接触来分:接触式和无接触式两类。 第二节 正余弦旋转变压器的工作原理 4.2.1正弦绕组 在旋转变压器中常用的绕组有两种形式,即双层短距分布绕组和同心式正 弦绕组。 双层短距分布绕组能够达到较高的绕组精度并有良好的工艺性,但在绕组中存在一定量的谐波磁动势分量,其所引起的正余弦函数的误差达0.01%-0.07%,再加上工艺因素引起的误差,使旋转变压器的精度受到一定的限制,故双层短距分布绕组只适合对精度要求不很高的旋转变压器。 同心式正弦绕组为高精度绕组,它使各次谐波削弱到相当小,正余弦函数的误差从0.06%降到0.03%以下。缺点为工艺性差,绕组系数低。 正弦绕组是指绕组各元件的导体数沿定子内圆或转子外圆按正弦规律分布的同心式绕组。通常有两种分布形式:第一类是绕组的轴线对准槽的中心线,第二类是绕组的轴线对准齿的中心线。旋转变压器大都采用这两类正弦绕组。 图4-2表示了正弦绕组中各元件在空间沿转子圆周外圆分布的情况及空间磁动势的分布情况。为了使正弦绕组中各元件匝数沿圆周按正弦分布,各元件的匝数应满足 Z )i (cos N N cm ci π 12-= 正弦绕组每相的总匝数为 ])142cos(...3cos [cos 4 1 Z Z Z Z N N N cm Z i ci π ππ-+++==∑= 4.2.2 正余弦旋转变压器的工作原理 正余弦旋转变压器通常为两极结构,定子和转子分别安装两套互相垂直的正弦绕组。 定子绕组:21D D ——励磁绕组,43D D ——交轴绕组(或补偿绕组)。 转子绕组(输出绕组):21Z Z ——正弦绕组,43Z Z ——余弦绕组。定、转子间的气隙是均匀的。 图4-2 正弦绕组 f U α 图4-1 正余弦旋转变压器 的原理示意图
旋转变压器基础知识
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。 按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。 线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。后者(XDX )称单绕组线性旋转变压器。 3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。 二、 旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z 为阻抗。设加在定子绕组的激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为 sin sin sin θθω== (4-2)B s m V KV KV t (4—2) 式中K ——旋转变压器的变化;—的幅值m s V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。如果转子 安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过 的角度,它间接反映了机床工作台的位移。 由式(4-2)可知,转子绕组中的感应电势 B V 为以角速度ω随时间t 变化的交变电压信号。 其幅值 sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。因此,只要测量出转子绕组中的感 应电势的幅值,便可间接地得到转子相对于定子的位置,即θ角的大小。 以上是两极绕组式旋转变压器的基本工作原理,在实际应用中,考虑到使用的方便性和检测精度等因素,常采用四极绕组式旋转变压器。这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。 1.鉴相式工作方式 鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。如 图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。图中12S S 为定子主绕组,12 K K 为定子辅助绕组。当12S S 和12K K 中分别通以交变激磁电压时 s m V V cos (43);V V sin (44)ωω--= = t t (4—3) s m (43);V V sin (44)ω-- = t t (4—4) 根据线性叠加原理,可在转子绕组12B B 中得到感应电势B V ,其值为激磁电压s V 和k V 在12B B 中产生 感应电势BS V 和BK V 之和,即
变压器基本工作原理
第1章 变压器的基本知识和结构 1.1变压器的基本原理和分类 一、变压器的基本工作原理 变压器是利用电磁感应定律把一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能。 变压器工作原理图 当原边绕组接到交流电源时,绕组中便有交流电流流过,并在铁心中产生与外加电压频率相同的磁通,这个交变磁通同时交链着原边绕组和副边绕组。原、副绕组的感应分别表示为 dt d N e Φ-=1 1 dt d N e Φ-=2 2 则 k N N e e u u ==≈2 12121 变比k :表示原、副绕组的匝数比,也等于原边一相绕组的感应电势与副边一相绕组的感应电势之比。 改变变压器的变比,就能改变输出电压。但应注意,变压器不能改变电能的频率。 二、电力变压器的分类 变压器的种类很多,可按其用途、相数、结构、调压方式、冷却方式等不同来进行分类。 按用途分类:升压变压器、降压变压器; 按相数分类:单相变压器和三相变压器;
按线圈数分类:双绕组变压器、三绕组变压器和自耦变压器; 按铁心结构分类:心式变压器和壳式变压器; 按调压方式分类:无载(无励磁)调压变压器、有载调压变压器; 按冷却介质和冷却方式分类:油浸式变压器和干式变压器等; 按容量大小分类:小型变压器、中型变压器、大型变压器和特大型变压器。 三相油浸式电力变压器的外形,见图1,铁心和绕组是变压器的主要部件,称为器身见图2,器身放在油箱内部。 1.2电力变压器的结构 一、铁心 1.铁心的材料 采用高磁导率的铁磁材料—0.35~0.5mm厚的硅钢片叠成。 为了提高磁路的导磁性能,减小铁心中的磁滞、涡流损耗。变压器用的硅钢片其含硅量比较高。硅钢片的两面均涂以绝缘漆,这样可使叠装在一起的硅钢片相互之间绝缘。
【毕业设计】基于PLC的变频调速电梯控制系统设计与实现
1. 基于C8051F单片机直流电动机反馈控制系统的设计与研究 2. 基于单片机的嵌入式Web服务器的研究 3. MOTOROLA单片机MC68HC(8)05PV8/A内嵌EEPROM的工艺和制程方法及对良率的影响研究 4. 基于模糊控制的电阻钎焊单片机温度控制系统的研制 5. 基于MCS-51系列单片机的通用控制模块的研究 6. 基于单片机实现的供暖系统最佳启停自校正(STR)调节器 7. 单片机控制的二级倒立摆系统的研究 8. 基于增强型51系列单片机的TCP/IP协议栈的实现 9. 基于单片机的蓄电池自动监测系统 10. 基于32位嵌入式单片机系统的图像采集与处理技术的研究 11. 基于单片机的作物营养诊断专家系统的研究 12. 基于单片机的交流伺服电机运动控制系统研究与开发 13. 基于单片机的泵管内壁硬度测试仪的研制 14. 基于单片机的自动找平控制系统研究 15. 基于C8051F040单片机的嵌入式系统开发 16. 基于单片机的液压动力系统状态监测仪开发 17. 模糊Smith智能控制方法的研究及其单片机实现 18. 一种基于单片机的轴快流CO〈,2〉激光器的手持控制面板的研制 19. 基于双单片机冲床数控系统的研究 20. 基于CYGNAL单片机的在线间歇式浊度仪的研制 21. 基于单片机的喷油泵试验台控制器的研制 22. 基于单片机的软起动器的研究和设计 23. 基于单片机控制的高速快走丝电火花线切割机床短循环走丝方式研究 24. 基于单片机的机电产品控制系统开发 25. 基于PIC单片机的智能手机充电器 26. 基于单片机的实时内核设计及其应用研究 27. 基于单片机的远程抄表系统的设计与研究 28. 基于单片机的烟气二氧化硫浓度检测仪的研制 29. 基于微型光谱仪的单片机系统 30. 单片机系统软件构件开发的技术研究 31. 基于单片机的液体点滴速度自动检测仪的研制 32. 基于单片机系统的多功能温度测量仪的研制 33. 基于PIC单片机的电能采集终端的设计和应用 34. 基于单片机的光纤光栅解调仪的研制 35. 气压式线性摩擦焊机单片机控制系统的研制 36. 基于单片机的数字磁通门传感器 37. 基于单片机的旋转变压器-数字转换器的研究 38. 基于单片机的光纤Bragg光栅解调系统的研究 39. 单片机控制的便携式多功能乳腺治疗仪的研制 40. 基于C8051F020单片机的多生理信号检测仪 41. 基于单片机的电机运动控制系统设计 42. Pico专用单片机核的可测性设计研究 43. 基于MCS-51单片机的热量计 44. 基于双单片机的智能遥测微型气象站 45. MCS-51单片机构建机器人的实践研究 46. 基于单片机的轮轨力检测 47. 基于单片机的GPS定位仪的研究与实现 48. 基于单片机的电液伺服控制系统 49. 用于单片机系统的MMC卡文件系统研制 50. 基于单片机的时控和计数系统性能优化的研究 51. 基于单片机和CPLD的粗光栅位移测量系统研究 52. 单片机控制的后备式方波UPS 53. 提升高职学生单片机应用能力的探究 54. 基于单片机控制的自动低频减载装置研究 55. 基于单片机控制的水下焊接电源的研究 56. 基于单片机的多通道数据采集系统 57. 基于uPSD3234单片机的氚表面污染测量仪的研制 58. 基于单片机的红外测油仪的研究 59. 96系列单片机仿真器研究与设计 60. 基于单片机的单晶金刚石刀具刃磨设备的数控改造 61. 基于单片机的温度智能控制系统的设计与实现 62. 基于MSP430单片机的电梯门机控制器的研制 63. 基于单片机的气体测漏仪的研究 64. 基于三菱M16C/6N系列单片机的CAN/USB协议转换器 65. 基于单片机和DSP的变压器油色谱在线监测技术研究 66. 基于单片机的膛壁温度报警系统设计 67. 基于AVR单片机的低压无功补偿控制器的设计 68. 基于单片机船舶电力推进电机监测系统 69. 基于单片机网络的振动信号的采集系统 70. 基于单片机的大容量数据存储技术的应用研究 71. 基于单片机的叠图机研究与教学方法实践 72. 基于单片机嵌入式Web服务器技术的研究及实现 73. 基于AT89S52单片机的通用数据采集系统 74. 基于单片机的多道脉冲幅度分析仪研究 75. 机器人旋转电弧传感角焊缝跟踪单片机控制系统 76. 基于单片机的控制系统在PLC虚拟教学实验中的应用研究 77. 基于单片机系统的网络通信研究与应用 78. 基于PIC16F877单片机的莫尔斯码自动译码系统设计与研究 79. 基于单片机的模糊控制器在工业电阻炉上的应用研究 80. 基于双单片机冲床数控系统的研究与开发 81. 基于Cygnal单片机的μC/OS-Ⅱ的研究 82. 基于单片机的一体化智能差示扫描量热仪系统研究 83. 基于TCP/IP协议的单片机与Internet互联的研究与实现 84. 变频调速液压电梯单片机控制器的研究 85. 基于单片机γ-免疫计数器自动换样功能的研究与实现 86. 基于单片机的倒立摆控制系统设计与实现 87. 单片机嵌入式以太网防盗报警系统 88. 基于51单片机的嵌入式Internet系统的设计与实现 89. 单片机监测系统在挤压机上的应用 90. MSP430单片机在智能水表系统上的研究与应用 91. 基于单片机的嵌入式系统中TCP/IP协议栈的实现与应用 92. 单片机在高楼恒压供水系统中的应用 93. 基于ATmega16单片机的流量控制器的开发 94. 基于MSP430单片机的远程抄表系统及智能网络水表的设计 95. 基于MSP430单片机具有数据存储与回放功能的嵌入式电子血压计的设计 96. 基于单片机的氨分解率检测系统的研究与开发 97. 锅炉的单片机控制系统 98. 基于单片机控制的电磁振动式播种控制系统的设计 99. 基于单片机技术的WDR-01型聚氨酯导热系数测试仪的研制 100. 一种RISC结构8位单片机的设计与实现 101. 基于单片机的公寓用电智能管理系统设计 102. 基于单片机的温度测控系统在温室大棚中的设计与实现 103. 基于MSP430单片机的数字化超声电源的研制 104. 基于ADμC841单片机的防爆软起动综合控制器的研究 105. 基于单片机控制的井下低爆综合保护系统的设计 106. 基于单片机的空调器故障诊断系统的设计研究 107. 单片机实现的寻呼机编码器 108. 单片机实现的鲁棒MRACS及其在液压系统中的应用研究 109. 自适应控制的单片机实现方法及基上隅角瓦斯积聚处理中的应用研究 110. 基于单片机的锅炉智能控制器的设计与研究 111. 超精密机床床身隔振的单片机主动控制 112. P IC单片机在空调中的应用 113. 单片机控制力矩加载控制系统的研究 项目论证,项目可行性研究报告,可行性研究报告,项目推广,项目研究报告,项目设计,项目建议书,项目可研报告,本文档支持完整下载,支持任意编辑!选择我们,选择成功! 项目论证,项目可行性研究报告,可行性研究报告,项目推广,项目研究报告,项目设计,项目建议书,项目可研报告,本文档支持完整下载,支持任意编辑!选择我们,选择成功! 单片机论文,毕业设计,毕业论文,单片机设计,硕士论文,研究生论文,单片机研究论文,单片机设计论文,优秀毕业论文,毕业论文设计,毕业过关论文,毕业设计,毕业设计说明,毕业论文,单片机论文,基于单片机论文,毕业论文终稿,毕业论文初稿,本文档支持完整下载,支持任意编辑!本文档全网独一无二,放心使用,下载这篇文档,定会成功! 目录 摘要 ....................................................................................................................... I Abstract ................................................................................................................ II 第1章绪论 (1) 1.1课题的研究背景 (1) 1.2电梯的国内外发展状况 (2) 1.3PLC在电梯控制中的应用以及发展前景 (3)
旋转变压器原理及应用
旋轉變壓器原理及應用 上海贏雙電機有限公司 ⒈概述 ⒈⒈旋轉變壓器的發展 旋轉變壓器用於運動伺服控制系統中,作為角度位置的傳感和測量用。早期的旋轉變壓器用於計算解答裝置中,作為模擬電腦中的主要組成部分之一。其輸出,是隨轉子轉角作某種函數變化的電氣信號,通常是正弦、余弦、線性等。這些函數是最常見的,也是容易實現的。在對繞組做專門設計時,也可產生某些特殊函數的電氣輸出。但這樣的函數只用於特殊的場合,不是通用的。60年代起,旋轉變壓器逐漸用於伺服系統,作為角度信號的產生和檢測元件。三線的三相的自整角機,早於四線的兩相旋轉變壓器應用於系統中。所以作為角度信號傳輸的旋轉變壓器,有時被稱作四線自整角機。隨著電子技術和數字計算技術的發展,數字式電腦早已代替了模擬式電腦。所以實際上,旋轉變壓器目前主要是用於角度位置伺服控制系統中。由於兩相的旋轉變壓器比自整角機更容易提高精度,所以旋轉變壓器應用的更廣泛。特別是,在高精度的雙通道、雙速系統中,廣泛應用的多極電氣元件,原來採用的是多極自整角機,現在基本上都是採用多極旋轉變壓器。 旋轉變壓器是目前國內的專業名稱,簡稱“旋變”。俄文裏稱作“ВращающийсяТрансформатор” ,詞義就是“旋轉變壓器”。英文名字叫“resolver”,根據詞義,有人把它稱作為“解算器”或“分解器”。 作為角度位置傳感元件,常用的有這樣幾種:光學編碼器、磁性編碼器和旋轉變壓器。由於製作和精度的緣故,磁性編碼器沒有其他兩種普及。光學編碼器的輸出信號是脈衝,由於是天然的數字量,數據處理比較方便,因而得到了很好的應用。早期的旋轉變壓器,由於信號處理電路比較複雜,價格比較貴的原因,應用受到了限制。因為旋轉變壓器具有無可比擬的可靠性,以及具有足夠高的精度,在許多場合有著不可代替的地位,特別是在軍事以及航太、航空、航海等方面。 隨著電子工業的發展,電子元器件集成化程度的提高,元器件的價格大大下降;另外,信號處理技術的進步,旋轉變壓器的信號處理電路變得簡單、可靠,價格也大大下降。而且,又出現了軟體解碼的信號處理,使得信號處理問題變得更加靈活、方便。這樣,旋轉變壓器的應用得到了更大的發展,其優點得到了更大的體現。和光學編碼器相比,旋轉變壓器有這樣幾點
旋转变压器原理及其在自动控制中的应用
旋转变压器原理及其在自动控制中的应用.txt婚姻是键盘,太多秩序和规则;爱情是鼠标,一点就通。男人自比主机,内存最重要;女人好似显示器,一切都看得出来。旋转变压器原理及其在自动控制中的应用 摘要:介绍旋转变压器(简称旋变)分类、结构特点、工作原理和解码方法,以及在各行各业中的应用,还有与其相关的工业设备(SMARTCAM)的应用特点。 关键词:旋转变压器,SMARTCODER,SMARTCAM 旋转变压器 简称旋变是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。 按输出电压与转子转角间的函数关系,主要分三大类旋转变压器: 1.正--余弦旋转变压器----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2.线性旋转变压器----其输出电压与转子转角成线性函数关系。线性旋转变压器 按转子结构又分成隐极式和凸极式两种。 3.比例式旋转变压器----其输出电压与转角成比例关系。 结构说明 由于我公司只销售日本多摩川公司的正余弦旋转变压器,所以在此介绍的旋转变压器皆为正余弦型的。 旋变由转子和定子绕组构成,并且两者相互独立,初级和次极线圈都绕在定子上,转子由两组相差90度线圈组成,采用无刷设计,如图1所示。 转子绕组定子绕组 图1 图2是旋转变压器电气示意图。 ER1-R2 励磁电压
Ve ES2-S4 图2 旋变的输入输出电压之间的具体函数关系如下所示: 设转子转动角度为θ,初级线圈电压(即励磁电压): ER1-R2=E*Sin2πft f:励磁频率, E:信号幅度 那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ K:传输比,θ:转子偏离原点的角度 令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图3所示, 图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。 不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。只需达到一定的电压数值即可, 一般来讲3V~120%额定电压。 (旋变转子旋转角度) 电气角 图3 解码 日本多摩川公司推出了自己的多款解码芯片,其原理都基本相同,如图4所示,解码芯片原理框图中如果图中Vsr=0, 那么θm=θrd. 即可解码出转子转角。 乘法器 SIN COS D/A θrd 相敏解 调器 积分器 压控振 荡器 VSR=kE1sinωt*sin(θm-θrd) 1相励磁,两相出力
单相变压器的基本工作原理和结构
变压器是一种静止电器,它通过线圈间的电磁感应,将一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能. 3.1 变压器的基本工作原理和结构 3.2 单相变压器的空载运行 3.3 单相变压器的负载运行 3.4 变压器的参数测定 3.5 变压器的运行特性 隐形专家改编于2009-05
3.1 变压器的基本工作原理和结构 3.1.1 基本工作原理和分类 一、基本工作原理 变压器的主要部件是铁心和套在铁心上的两个绕组。两绕组只有磁耦合没电联系。在一 次绕组中加上交变电压,产生交链一、二次绕 组的交变磁通,在两绕组中分别感应电动势。 1 u 1 e 2 e 2u 1i 2 i Φ 1 U 2 U 1 u 2u L Z 1 2 12d Φe =-N dt d Φe =-N dt 只要(1)磁通有 变化量;(2)一、二次绕组的匝数不同,就能达到改变压的 目的。
二、分类 按用途分:电力变压器和电子变压器。 按绕组数目分:单绕组(自耦)变压器、双绕组变压器、三绕组变压器和多绕组变压器。 按相数分:单相变压器、三相变压器和多相变压器。 按铁心结构分:心式变压器、壳式变压器、环形变压器。 按工作频率分:低频(工频)与高频变压器
3.1.2基本结构 一、铁心 变压器的主磁路,为了提高导磁性能和减少铁损,用厚为 0.35-0.5mm、表面涂有绝缘漆的硅钢片叠成或卷绕而成。 二、绕组 变压器的电路,一般用绝缘铜线或铝线绕制而成。 三、胶心 胶心也可称骨架,用塑料压制而成,用来固定线圈。 四、固定夹 固定夹也可称牛夹,用铁板冲压而成,用来将变 压器固定在底板上。
旋转变压器分类及接口电路
摘要:本文简要介绍编码器、旋转变压器应用特点和接口方法,其中重点介绍产品通信协议和硬件接口电路以及专用的接收芯片AU5561应用方法。 编码器发展历史 早期的编码器主要是旋转变压器,旋转变压器IP值高,能在一些比较恶劣的环境条件下工作,虽然因为对电磁干扰敏感以及解码复杂等缺点而逐渐退出,但是时至今日,仍然有其特有的价值,比如作为混合动力汽车的速度反馈,几乎是不可代替的,此外在环境恶劣的钢铁行业、水利水电行业,旋转变压器因为其防护等级高同样获得了广泛的应用。随着半导体技术的发展,后来便有霍尔传感器和光电编码器,霍尔传感器精度不高但价格便宜,而且不能耐高温,只适合用在一些低端场合,光电编码器正是由于克服了前面两种编码器的缺点而产生,它精度高,抗干扰能力强,接口简单使用方便因而获得了最广泛的应用。 编码器的生产厂家很多,这里以多摩川的产品为例进行介绍。 下面以旋转变压器、增量式编码器、绝对式编码器为例逐一进行介绍。 旋转变压器 简称旋变是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。 按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。用户往往选择BRT型的旋变,因为它易于解码。 旋转变压器解码 图4旋转变压器电气示意图。 旋变的输入输出电压之间的具体函数关系如下所示: 设转子转动角度为θ,初级线圈电压(即励磁电压):ER1-R2=E*Sin2πft f:励磁频率,E:信号幅度 那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ K:传输比, θ:转子偏离原点的角度 令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图5所示, 图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。 不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。只需达到一定的电压数值即可,一般来讲3V~1.2倍额定电压都可满足解码需求。 多摩川为自己的旋变开发了专门的解码芯片AU6802N1,并且艾而特公司有现成的解码板可供使用,解码板支持10KHZ励磁频率,0.5的传输比,可以同时提供增量式和绝对式信号输出,增量式输出
旋转变压器(resolver)原理
§4—1旋转变压器 旋转变压器是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 一、旋转变压器的结构 旋转变压器的结构和两相绕线式异步电机的结构相似,可分为定子和转子两大部分。定子和转子的铁心由铁镍软磁合金或硅钢薄板冲成的槽状心片叠成。它们的绕组分别嵌入各自的槽状铁心内。定子绕组通过固定在壳体上的接线柱直接引出。转子绕组有两种不同的引出方式。根据转子绕组两种不同的引出方式,旋转变压器分为有刷式和无刷式两种结构形式。 图4-1是有刷式旋转变压器。它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与滑环是机械滑动接触的,所以旋转变压器的可靠性差,寿命也较短。 图4-1 有刷式旋转变压器
图4-2 无刷式旋转变压器 图4—2是无刷式旋转变压器。它分为两大部分,即旋转变压器本体和附加变压器。附加变压器的原、副边铁心及其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。旋转变压器本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及使用寿命,但其体积、质量、成本均有所增加。 常见的旋转变压器一般有两极绕组和四极绕组两种结构形式。两极绕组旋转变压器的定子和转子各有一对磁极,四极绕组则有两对磁极,主要用于高精度的检测系统。除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。 二、旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z为阻抗。设 加在定子绕组的激磁电压为
变压器基本工作原理
第1章 变压器的基本知识和结构 1.1变压器的基本原理和分类 一、变压器的基本工作原理 变压器是利用电磁感应定律把一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能。 变压器工作原理图 当原边绕组接到交流电源时,绕组中便有交流电流流过,并在铁心中产生与外加电压频率相同的磁通,这个交变磁通同时交链着原边绕组和副边绕组。原、副绕组的感应分别表示为 则 k N N e e u u ==≈2 12121 变比k :表示原、副绕组的匝数比,也等于原边一相绕组的感应电势与副边一相绕组的感应电势之比。 改变变压器的变比,就能改变输出电压。但应注意,变压器不能改变电能的频率。 二、电力变压器的分类 变压器的种类很多,可按其用途、相数、结构、调压方式、冷却方式等不同来进行分类。 按用途分类:升压变压器、降压变压器; 按相数分类:单相变压器和三相变压器; 按线圈数分类:双绕组变压器、三绕组变压器和自耦变压器; 按铁心结构分类:心式变压器和壳式变压器; 按调压方式分类:无载(无励磁)调压变压器、有载调压变压器; 按冷却介质和冷却方式分类:油浸式变压器和干式变压器等; 按容量大小分类:小型变压器、中型变压器、大型变压器和特大型变压器。 三相油浸式电力变压器的外形,见图1,铁心和绕组是变压器的主要部件,称为器身见图2,器身放在油箱内部。
1.2电力变压器的结构 一、铁心 1.铁心的材料 采用高磁导率的铁磁材料—0.35~0.5mm厚的硅钢片叠成。 为了提高磁路的导磁性能,减小铁心中的磁滞、涡流损耗。变压器用的硅钢片其含硅量比较高。硅钢片的两面均涂以绝缘漆,这样可使叠装在一起的硅钢片相互之间绝缘。 2.铁心形式 铁心是变压器的主磁路,电力变压器的铁心主要采用心式结构 。 二、绕组 1.绕组的材料 铜或铝导线包绕绝缘纸以后绕制而成。 2.形式
多关节工业机器人设计---毕业设计开题报告
本 科 生 毕 业 设 计(论 文) 开题报告 题目: 多关节工业机器人设计— 机械系统 姓 名: 学 号: 指导教师: 班 级: 所在院系: 机电工程学院
陕西科技大学毕业设计(论文)开题报告内容 课题的目的、意义;国内外技术现状及发展趋势 课题的目的及意义 随着我国工业化进程的不断加快,劳动力成本的不断增大,工业机器人的长足发展已是一个必然的趋势。现如今,机器人技术在我国工业领域已经有了较广泛的应用,所以,通过对此课题的研究,一方面可以使我在走上工作岗位之前将理论知识与实践环节进行一次紧密的联系,将所学知识可以进行系统性的回顾与应用,从而更加深刻的理解和掌握所学的知识。另一方面,通过这次课题的设计,可以加强我的实践能力,为最终顺利走上工作岗位打下坚实的基础。 国内外技术现状及发展趋势 国内在普及第一代工业机器人的基础上,第二代工业机器人已经推广,成为主流安装机型,第三代智能机器人已占有一定比重(占日本1998年安装台数的10%,销售额的36%)。(1)在机械结构方面,已关节型为主流,80年代发明的使用于装配作业的平面关节机器人约占总量的1/3。90年代初开发的适应于窄小空间、快节奏、360度全工作空间范围的垂直关节机器人大量用于焊接和上、下料。应3K和汽车、建筑、桥梁等行业需求,超大型机器人应运而生。(如焊接数10米长、10吨以上大构件的弧焊机器人群,采取蚂蚁啃骨头的协作机构。)CAD、CAE等技术已普遍用于设计,仿真和制造中。(2)在控制技术方面,大多数采用32位CPU,控制轴数多达27轴,NC技术、离线编程技术大量采用。协调控制技术日趋成熟,实现了多手与变位机、多机器人的协调控制,正逐步实现多智能体的协调控制。采用基于PC的开放结构的控制系统已成为一股潮流,其成本低、具有标准现场网络功能。(3)在驱动技术方面,80年代发展起来的AC侍服驱动已成为主流驱动技术用于工业机器人中。DD驱动技术则广泛地用于装配机器人中。2、新一代的侍服电机与基于微处理器的智能侍服控制器相结合已由FANUC等公司开发并用于工业机器人中,在远程控制中已采用了分布式智能驱动新技术。(4)装有视觉传感器的机器人数量呈上升趋势,不少机器人装有两种传感器,有些机器人留了多种传感器接口。(5)大部分机器人采用了Ether网络通讯方式,占总量的41.3,其它采用RS-232、RA-422、RS-485等通讯接口。(6)目前,最快的装配机器人最大合成速度为16.5m/s。位置重复精度为正负0.01mm。但有一种速度竞达到80m/s;而另一种并连机构的NC机器人,其位置重复精度大1微秒。 在国外,应用于制造业的机器人取得了较显著进展,已成为一种标准设备而得到工业界广泛应用,从而也形成了一批在国际上较有影响力的、知名机器人公司。如德国的KUKA、瑞典的ABB、日本的安川等。据专家预测,机器人产业是继汽车、计算机之后出现的一种新的大型高技术产业。据联合国欧洲经济委员会(UNECE)和国际机器人联合会(IFR)的统计,2002年至2004年,世界机器人市场年增长率平均在10%左右,2005年达到创纪录的30%,2007年全球机器人实际安装量达到650万台,机器人安装量比2006年增加3%,达到了114365台。据统计,近年来全球机器人行业发展迅速,2008年全球机器人行业总销售量比2006年增长25%。而无论在使用、生产还是出口方面,日本一直是全球领先者,目前日本已经有130余家专业的机器人制造商。 在发达国家,以工业机器人为基础的自动化生产线成套装备已成为自动化装备的主流及未来发展方向。国外汽车行业、电子电器行业、工程机械等行业已大量使用机器人自动化生产线,以保证产品质量和生产效率。目前,典型的成套装备有:大型轿车壳体冲压自动化系统技术和成套装备,大型机器人车体焊装自动化系统技术和成套装备,电子电器等机器人柔性自动化装配及检测成套技术和装备,机器人发动机、变速箱装配自动化系统技术成套装备及板材激光拼焊成套装备等。这些机器人自动化成套装备的使用,大大推动了其行业的快速发展。
旋转变压器开关应用
旋转变压器在开关电源上的应用 摘要:介绍了非接触式旋转高频链变压器在旋转机构电源上的应用,CRFT 的使用代替了传统的电能传递方式,即电刷电能传递方式,大大延长了旋转机构电源系统的使用寿命和使用可靠性。采用软开关技术,减少了电能在磁场中传递而进行变换产生的电磁干扰,解决了与静止供电完全没有物理接触的旋转电路的供电问题。实验证明,CRFT 完全可以在旋转机构供电场合代替电刷及滑环。 关键词:开关电源/ 非接触式旋转高频链变压器;旋转机构 ------------------------------------------------------------------------------------ 引言 任何电子设备都需要电源,旋转机构系统也是如此,如石油钻井、造纸机械、直升机旋翼等机构上的传感器及测试设备的供电,卫星、雷达等需要将电能传递到旋转用电设备的场合等。 以卫星电源为例,卫星在绕地球轨道运行的过程中,自身始终以一定的角速率旋转。而卫星的太阳能电池板为了最大限度地利用太阳能,必须始终正对太阳照射的向。随着卫星在轨道上位置的变化,伺服机构实时调节太阳能电池板的朝向。太阳能电池板和卫星星体之间的电能传递传统上是通过石墨电刷与铜制滑环之间的接触实现的。石墨电刷因相对运动产生磨损,从而导致碳粉的掉落、接触的松动、供电不稳以及产生电火花等不良影响,最终导致电刷与滑环脱离接触,无法完成供电,成为该类旋转机构电源寿命延长的瓶颈。 而使用非接触式旋转高频链变压器,则可以从根本上解决接触磨损的问题。美国在1996 年成功研制出传递功率达400 W 的非接触式旋转变压器电源,但使用的是400 Hz 的中频硅钢片变压器,重量较大。2002 年,欧洲和法国玛特拉宇航系统公司联合研制 出了传递功率达到100 W 的旋转高频链开关电源,该电源系统不仅可以传递电能,还可以传递19.2 k/s 的信息数据[1]。非接触式旋转高频链逆变器可用于所有需向旋转机 构提供电能的领域。 1 CRFT 的结构和基本原理 CRFT 的工作频率为100 kHz 左右,因此,变压器所使用的磁性材料为锰锌铁氧体,它具有磁导率和电阻率较高,矫顽力较低的特点。在实际应用中,使绕组产生激磁电流就能产生较高的磁感应强度,传递较大的功率,同时具有较小的铁耗和涡流损耗。 图1 示出在CRFT 内部绕组放置的位置系。为防止意外的摩擦,绕组之间相互留有间隙。磁心之间也留有相对运动的间隙。旋
磁阻式多极旋转变压器的工作原理
磁阻式多极旋转变压器的工作原理 普通旋转变压器的精度较低,为角分的数量级,一般应用于精度要求不高或大型机床的粗测和中测系统中。为提高精度,近年来数控系统中广泛采用磁阻式多极旋转变压器。 磁阻式多极旋转变压器(又称细分解算器,或游标解算器),它是一种多极角度传感元件,实际上是一种非接触式磁阻可变的耦合变压器,其结构与传统的多极旋转变压器不同之处在于其励磁绕组和输出绕组均安置在定子铁心的槽中,转子仅由带齿的选片叠制而成,不放任何绕组,实现无接触运行。定子冲片内圆冲制有若干大齿(也称为极靴),每个大齿上又冲制若干等分小齿,绕组安放在大齿槽中。转子外圆表面冲制有若干等分小齿,其数与擞对数相等。输出和输入绕组均为集中绕制,其正余弦绕组的匝数控正弦规律变化。而传统结构的多极旋转变压器是采用分布式绕组。图6-4所示为磁阻式多极旋转变压器的原理示意图,其中画出了5个定子齿,4个转于齿。定子槽内安置了逐槽反向串接的输入绕组1-1和两个间隔绕制反向串接的输出绕组2-2,3-3。当给输入绕组1-1加上交流正弦电压时,两个输出绕组2-2、3-3中分别得到两个电压,其幅值主要取决于定子和转子齿的相对位置间气隙磁导的大小。当转子相对定子转动时,空间的气隙磁导发生变化,转子每转过一个转子齿距,气隙磁导变化一个周期;而当转子转过一周时,气隙磁导变化的周期数等于转子齿数。这样,转子的齿数就相当于磁阻式多极旋转变压器极对数,从而达到多极的效果。气隙磁导的变化,导致输入和输出绕组之间互感的变化,输出绕组感应的电势亦发生变化。实际应用中是通过输出电压幅值的变化而测得转子的转角的。
磁阻式多极旋转变压器没有电刷和滑环接触,工作可靠、抗冲击能力强,并能连续高速运行、寿命长,多用于高精度及各种控制式电气变速双通道系统,提高数控机床定位精度。尽管它的测量精度不如感应同步器和光栅,但高于普通旋转变压器,误差不超过3.5角秒,而且成本低,不需维修,输出信号电平高(0.5—1.5V.最高可达4V),所以在数控机床上的应用很有前途。
旋转变压器的工作原理及应用
旋转变压器的工作原理及应用 旋转变压器的工作原理及应用 旋转变压器又称分解器,是一种控制用的微电机,它将机械转角变换成与该转角呈某一函数关系的电信号的一种间接测量装置。在结构上与二相线绕式异步电动机相似,由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。激磁电压接到转子绕组上,感应电动势由定子绕组输出。常用的激磁频率为400Hz,500Hz,1000Hz和5000Hz。 旋转变 压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。因此,在数控机床上广泛应用。 通常应用的旋转变压器为二极旋转变压器,其定子和转子绕组中各有互相垂直的两个绕组。另外,还有一种多极旋转变压器。也可以把一个极对数少的和一个极对数多的两种旋转变压器做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。 什么是旋转变压器以及应用方式 什么是旋转变压器以及应用方式 旋转变压器又称分解器,是一种控制用的微电机,它将机械转角变换成与该转角呈某一函数关系的电信号的一种间接测量装置。 在结构上与二相线绕式异步电动机相似,由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。激磁电压接到转子绕组上,感应电动势由定子绕组输出。常用的激磁频率为400Hz,500Hz,1000Hz和5000Hz。 旋转 变压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。因此,在数控机床上广泛应用。 通常应用的旋转变压器为二极旋转变压器,其定子和转子绕组中各有互相垂直的两个绕组。另外,还有一种多极旋转变压器。也可以把一个极对数少的和一个极对数多的两种旋转变压器做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。 旋转变压器的应用 旋转变压器作为位置检测装置有两种应用方式:鉴相方式和鉴幅方式。 1.鉴相工作方式 在旋转变压器定子的两相正交绕组(正弦用s和和余弦用c表示),一般称为正弦绕组和余弦绕组上,分别输入幅值相等,频率相同的正弦、余弦激磁电压 Us=Umsinωt Uc=Umcosωt 两相激磁电压在转子绕组中会产生感应电动势。根据线性叠加原理,在转子绕组中感应电压为 U=kUssinθ机+kUccosθ机=kUmcos(ωt-θ机)
论文开题报告
开题报告填写要求 一、开题报告主要内容: 1.课题来源、目的、意义。 2.国内外研究现况及发展趋势。 3.预计达到的目标、关键理论和技术、主要研究内容、完成课 题的方案及主要措施。 4.课题研究进度安排。 5.主要参考文献。 二、报告内容用小四号宋体字编辑,采用A4号纸双面打印,封面与 封底采用浅蓝色封面纸(卡纸)打印。要求内容明确,语句通顺。 三、指导教师评语、教研室(系、所)或开题报告答辩小组审核意 见用蓝、黑钢笔手写或小四号宋体字编辑,签名必须手写。四、理、工、医类要求字数在3000字左右,文、管类要求字数在 2000 字左右。 五、开题报告应在第八学期第二周之前完成。
一、课题来源、目的、意义 机械动力设备的扭矩变化是其运行状况的重要信息,扭矩测试是各种机械产品开发、质量检测、优化控制、工况监测和故障诊断等必不可少的内容。扭矩传感器是扭矩测试中不可或缺的重要部分。它将扭力的变化转化成电信号,其精度关系到整个检测系统的精度。因此,随着对检测系统精度及应用范围要求的不断提高,扭矩传感器也不断发展。扭矩传感器已广泛应用与各种机械设备的动力驱动系统的优化设计和智能控制上。 将旋转物体的转速转换为电输出的传感器是转速传感器。转速传感器属于间接式测量装置,可用机械、电气、磁、光和混合式等方法制造。 按信号形式的不同,转速传感器可分为模拟式和数字式两种。前者的输出信号值是转速的线性函数,后者的输出信号频率与转速成正比,或其信号峰值间隔与转速成反比。 转速传感器的种类繁多、应用极广,其原因是在自动控制系统和自动化仪表中大量使用各种电机,在不少场合下对低速(如每小时一转以下)、高速(如每分钟数十万转)、稳速(如误差仅为万分之几)和瞬时速度的精确测量有严格的要求。 常用的转速传感器有光电式、电容式、变磁阻式以及测速发电机等。 随着低功耗微电子技术的发展,各类转矩/转速传感器被赋予了新的生命,其性能也越来越好,可测的精度与转速也越来越高。从传感器的分类来说,以往所有的转矩传感器都属于结构型传感器,由于都要利用弹性元件的机械变形,因此转矩传感器具有体积大、耗材多等缺点。但由于工艺成熟、牢固可靠、价格低廉,与微电子技术和计算机技术结合后易实现数字化、自动化,所以仍有十分广阔的应用前景。 扭矩/转速传感器的发展趋势是: (1)市场化、低成本化发展。 (2)智能化、数字化和网络化发展。 (3)随着新材料技术和其它传感器技术的不断发展,扭矩传感器必将向着不断开 发的新型材料、新技术方向发展。 (4)向两极化发展(即小型化和大型化发展)。
单列双层停车车位之机械结构总体设计方案
1 塑料注射模设计与成型工艺毕业设计。 2 奶瓶清洗机的拨瓶机构及滚筒设计。 3 奶瓶清洗机构的刷瓶机构设计。 4 DTⅡ型带式输送机设计。 5小模数齿轮工艺及滚齿机床夹具设计。 6叉车减震垫动态刚度测试仪总体设计之结构设计。 7 PHLJDQ-3025M型小型平衡力式密封电磁继电器。 8 放大镜的模具设计与制造'。 9 塑料端盖注射模具的结构设计。 10 78型轮胎省力扳手的设计。 11 单列双层停车车位之机械结构总体设计 12 双层车位设计——液压驱动方式之总体结构设计。 13 瓶灌装封口机传动装置设计。 14 机械零、部件模型建立——蜗轮蜗杆减速器整体动态模型。 15 滤清器接头螺母加工工艺、夹具及刀具设计。 16 端盖注射模具的结构设计33。 17 C6163普通车床主轴箱设计。 18 汽车主减总成疲劳寿命实验台的设计。 19 镗孔车端面组合机床总体及夹具设计。 20 镗孔车端面组合机床总体及液压系统设计。 21 58型轮胎省力扳手的设计。 22 拖拉机零件右壳体的工艺设计、多轴组合钻床设计、夹具设计。
23 叉车减震垫动态刚度检测仪---数据采集,总体设计。 24 68型轮胎省力扳手的设计。 25 JHJDQ-1M型微型密封极化继电器。 26 基于响应曲面法的铣削加工表面粗糙度预测模型 27 基于神经网络的铣削加工表面粗糙度预测模型。 28 基于改进粒子群优化LS-SVM的滴灌滴头水力性能预测 29 SVM的滴灌滴头水力性能预测。 30 基于CADCFD的滴灌滴头结构优化设计。 31 典型腔盖类零件CADCAM。 32 列车齿轮式手制动机设计及强度校核 33 基于CADCFD的滴灌滴头流场动力学分析 34 锥形流量计的设计。 36 汽油滤清器接头螺母加工工艺及数控专用机床设计。 如果您需要要上题目的毕业设计请加QQ1583858400 联系我! 《数控原理与系统》试卷1 一、填空题<每空1.5分,共30分) 1. 数控机床是用数字化代码来控制刀具与工件的相对运动, 从而完成零件的加工。 2. CPU是CNC装置的核心,它由运算器和控制器两个部分组成,运算器是对数据进行算术和逻辑运算的部件,控制器是统一指挥和控制数控 系统各部件的中央机构。 3. 所谓“插补”就是指在一条已知起点和终点的曲线上进行数据点的密化的过程。 4.数控系统按照有无检测反馈装置分为开环数控机床和闭环数控机床两种类型。 5.对于以坐标原点为起点的第一象限直线OA,其偏差函数为:,若