光学三维测量技术综述
光学三维测量技术综述
1.引言
客观景物三维信息的获取就是计算机辅助设计、三维重建以及三维成像技术中的基础环节,被测物体的三维信息的快速、准确的获得在虚拟现实、逆向工程、
生物与医学工程等领域有着广泛的应用[1]。
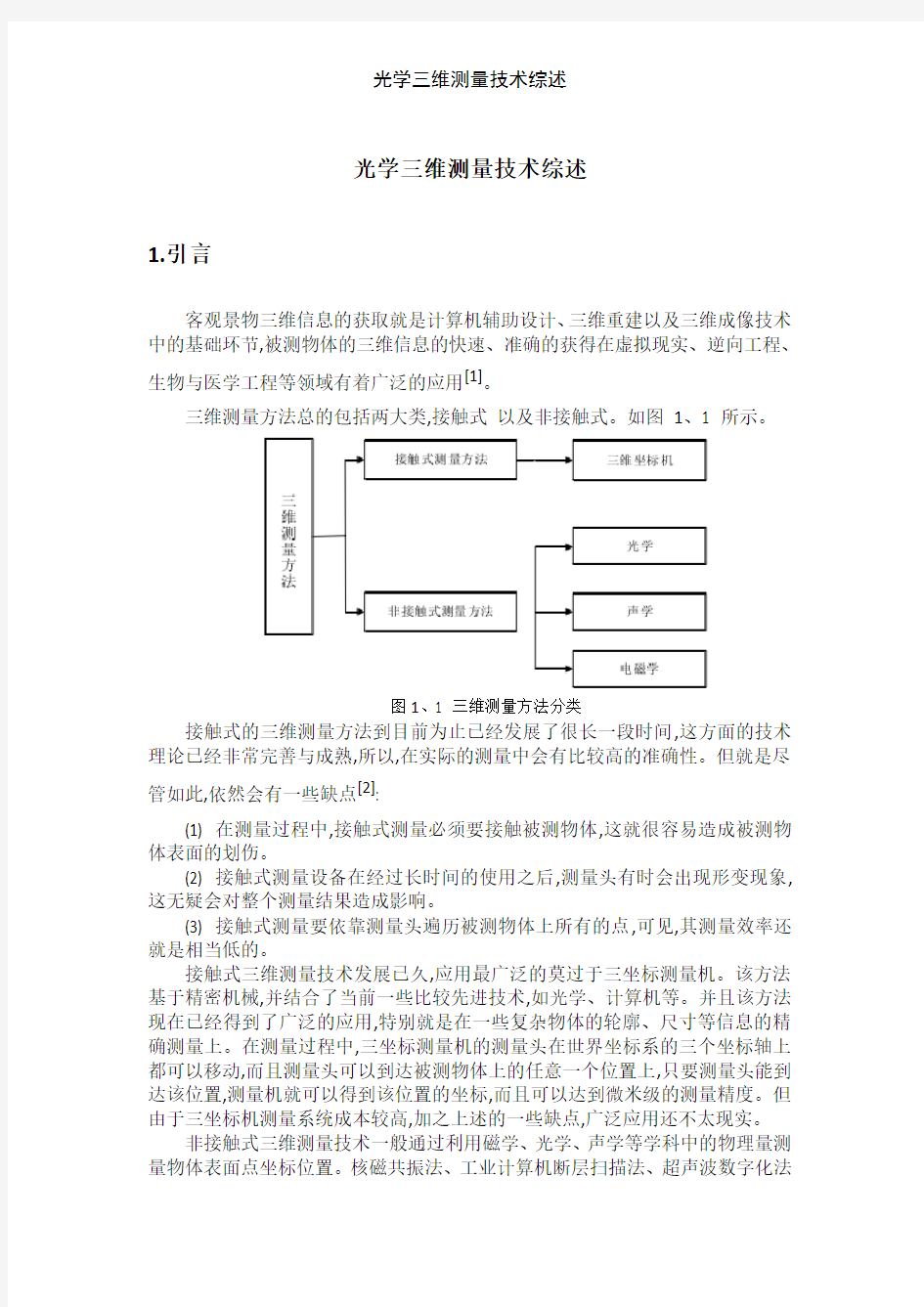
三维测量方法总的包括两大类,接触式以及非接触式。如图1、1 所示。
图1、1 三维测量方法分类
接触式的三维测量方法到目前为止已经发展了很长一段时间,这方面的技术理论已经非常完善与成熟,所以,在实际的测量中会有比较高的准确性。但就是尽
管如此,依然会有一些缺点[2]:
(1) 在测量过程中,接触式测量必须要接触被测物体,这就很容易造成被测物体表面的划伤。
(2) 接触式测量设备在经过长时间的使用之后,测量头有时会出现形变现象,这无疑会对整个测量结果造成影响。
(3) 接触式测量要依靠测量头遍历被测物体上所有的点,可见,其测量效率还就是相当低的。
接触式三维测量技术发展已久,应用最广泛的莫过于三坐标测量机。该方法基于精密机械,并结合了当前一些比较先进技术,如光学、计算机等。并且该方法现在已经得到了广泛的应用,特别就是在一些复杂物体的轮廓、尺寸等信息的精确测量上。在测量过程中,三坐标测量机的测量头在世界坐标系的三个坐标轴上都可以移动,而且测量头可以到达被测物体上的任意一个位置上,只要测量头能到达该位置,测量机就可以得到该位置的坐标,而且可以达到微米级的测量精度。但由于三坐标机测量系统成本较高,加之上述的一些缺点,广泛应用还不太现实。
非接触式三维测量技术一般通过利用磁学、光学、声学等学科中的物理量测量物体表面点坐标位置。核磁共振法、工业计算机断层扫描法、超声波数字化法
等非光学的非接触式三维测量方法也都可以测量物体的内部及外部结构的表面信息,且不需要破坏被测物体,但就是这种测量方法的精度不高。而光学三维轮廓测量由于其非接触性、高精度与高分辨率,在CAD /CAE、反求工程、在线检测与质量保证、多媒体技术、医疗诊断、机器视觉等领域得到日益广泛的应用,被公
认就是最有前途的三维轮廓测量方法[3]。由于光不能深入物体内部,所以光学三
维测量只能测量物体表面轮廓,因此,本文中所言光学三维测量即指光学三维轮廓测量,此后不再单独解释。
光学三维测量技术总体而言可以分为主动式光学三维测量与被动式光学三维测量,根据具体的原理又可以分为双目立体视觉测量法、离焦测量法、飞行时间法、激光三角法、莫尔轮廓术与结构光编码法等。下面就刚刚提到的几种光学三维测量技术的原理进行逐一讲解。
2、测量原理
2、1被动式光学三维测量
2、1、1双目立体视觉测量法
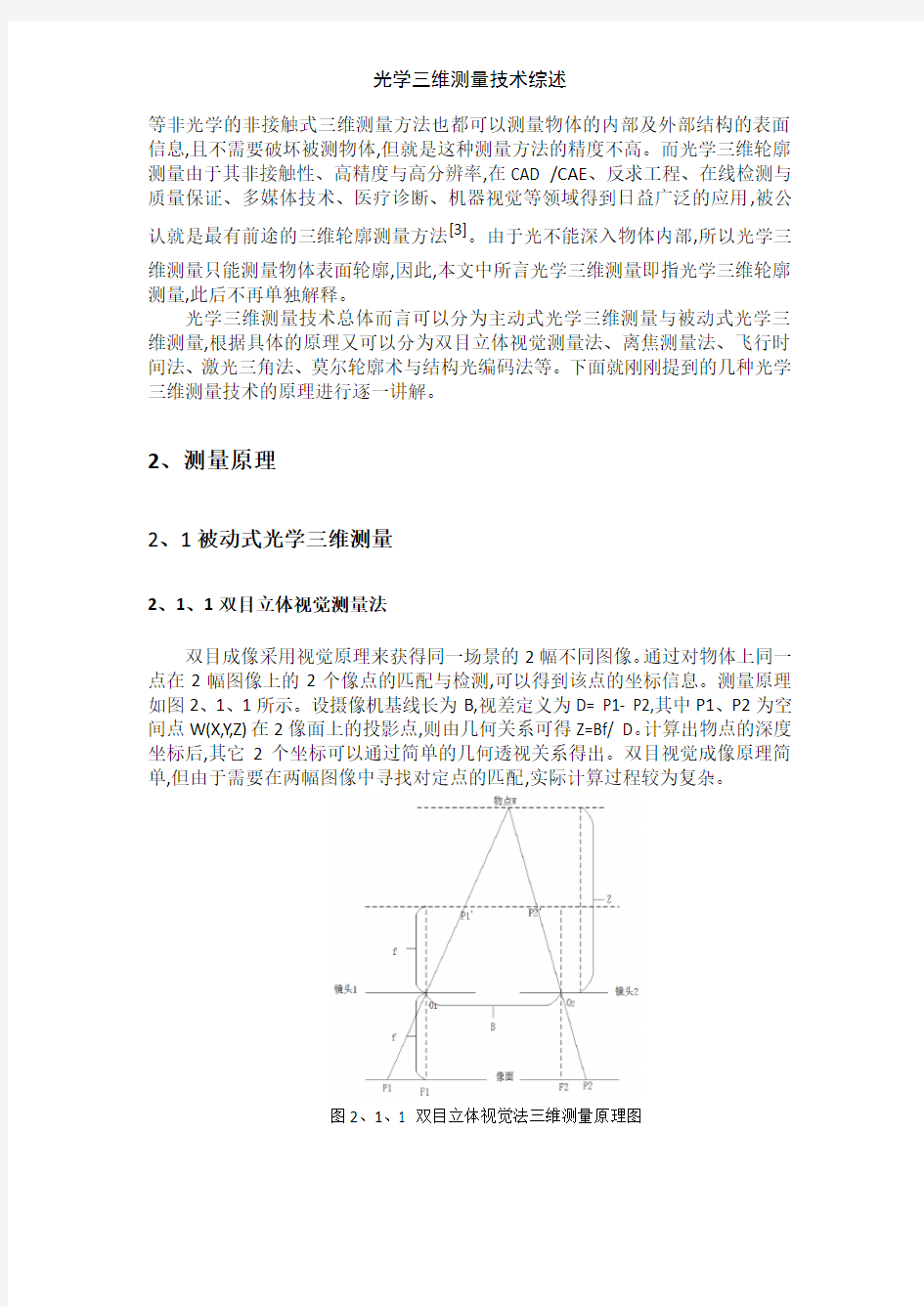
双目成像采用视觉原理来获得同一场景的2幅不同图像。通过对物体上同一点在2幅图像上的2个像点的匹配与检测,可以得到该点的坐标信息。测量原理如图2、1、1所示。设摄像机基线长为B,视差定义为D= P1- P2,其中P1、P2为空间点W(X,Y,Z)在2像面上的投影点,则由几何关系可得Z=Bf/ D。计算出物点的深度坐标后,其它2个坐标可以通过简单的几何透视关系得出。双目视觉成像原理简单,但由于需要在两幅图像中寻找对定点的匹配,实际计算过程较为复杂。
图2、1、1 双目立体视觉法三维测量原理图
2、1、2离焦测量法
离焦测量法根据标定出的离焦模型计算被测点相对于摄像机的距离。测量模型如图2、1、2所示。参考点A成像在像平面上的A'点,物体表面上的B点成像在B'点,则在像面上形成两个像点B1与B2,测出两点之间的距离则可以得到物体上点B的坐标。镜头前挡板上挖的两个小孔保证了探测器上最外围的两像点就是由轴上物点形成的。离焦测量法避免了寻找精确的聚焦位置,但却增加了标定过程的复杂性。另外,由于每次只能获取一个轴上点的三维坐标,所以离焦测量法需要通过二维扫描来完成物体轮廓面上各离散点的坐标测量,因此测量效率比较低。
图2、1、2 离焦测量法原理图
2、2主动式光学三维测量
2、2、1飞行时间法
飞行时间法(Time of Flight,简称TOF)简单而言就就是通过激光或者其她光源脉冲发射时间,通过测量飞行时间达到测量的目的,测量系统模型如图2、2、1所示。该测量方法具体如下:首先利用系统发射的激光或其她光源脉冲照射被测物体,通过反射原理到达系统接收器接收,就可以计算出激光或者其她光源脉冲的运行时间及距离。通过对被测量物体外部形态逐步扫描在通过数据处理得到物体的三维原始外貌。该测量方法运用激光或者其她光源脉冲飞行时间进行及接收器的带宽、灵敏度等进行测量,并且时间间隔的误差在一个很小的范围之内。因此运
用飞行时间法的测量系统目前误差已经达到微米级[3]。
为了进一步使该系统的测量精度提高,目前比较常用的方法就是提高测量系统工作时的频率,同时可以通过相位调制的方法。当激光束幅度被正弦波调制时,测量系统与被测物体之间的距离就可以由发射光束与接收光束之间的相位差得到。相位调制测量方法与脉冲调制方法相比较要复杂许多,然而减小了带宽,而且通过正弦波相位调制能够获得比较大的测量视角。基于飞行时间法的测量系统装置复杂,并要求配备带宽大、灵敏性高以与热稳定性好的电子设备,因而造价偏高,这些因素制约了其实际应用。
图2、2、1 飞行时间法原理图 2、2、2激光三角法
近年来随着激光技术的发展,激光三角形法逐渐得到广泛应用。它所采用的光源主要有点结构、线结构与双线结构。其基本原理就是光学三角形原理,如图2、2、2所示。由图可以得到
=/tan(), arctan(/)L B d f αγγ-= (2、2-1)
由此可以得到深度信息L 。这种方法具有原理简单、测量速度快与精度高等优点;缺点就是对物体表面特性与反射率、复杂程度等有较大限制[4]。
图2、2、2 激光三角法 2、2、3莫尔轮廓术
莫尔轮廓术又可以称为莫尔等高线法,就是一种非接触式三维测量方法,1970年由 H 、Taksaki 首次提出。莫尔轮廓术得到莫尔条纹的方法如下:一个基准光栅与投影到三维物体表面上受到物体表面高度调制的变形光栅叠合来形成莫尔条