基于LABVIEW串口通讯的LED控制
基于串口通讯的LED控制前言:LABVIEW的宣言”Software is instrument!”如果我们使用LABVIEW只停留在软件设计上,那就不能完全符合这个宣言的含义!其实NI为LABVIEW提供了一个强大的标准接口驱动应用——NI-VISA。
(https://www.360docs.net/doc/ec1489273.html,/nisearch/app/main/p/bot/no/ap/tech/lang/zhs/pg/1/sn/catnav:du,n8:3.25 .123.1640,ssnav:sup/)
只要你在LABVIEW的基础上再安装这个驱动,那你就可以设计一些连接硬件的实用型VI了!
1.功能说明:
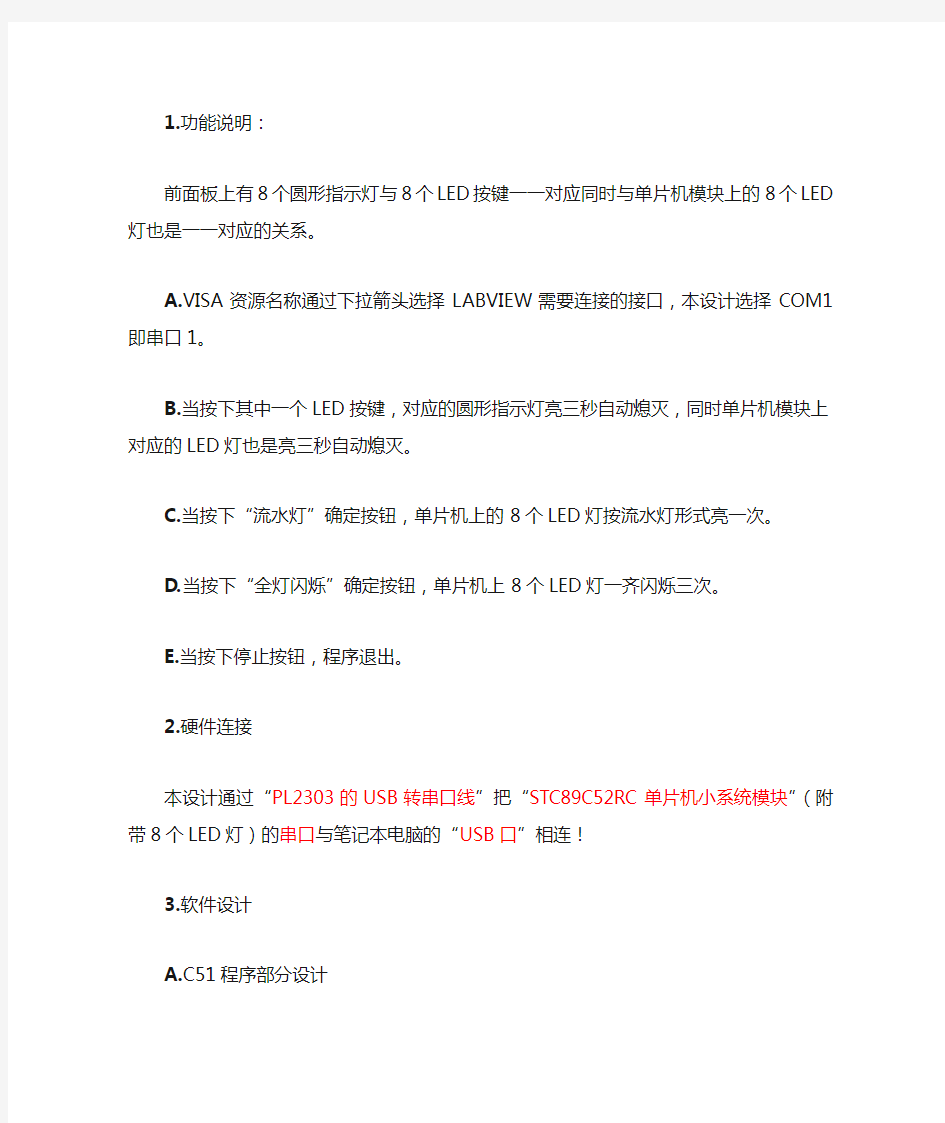
前面板上有8个圆形指示灯与8个LED按键一一对应同时与单片机模块上的8个LED 灯也是一一对应的关系。
A.VISA资源名称通过下拉箭头选择LABVIEW需要连接的接口,本设计选择COM1即串口1。
B.当按下其中一个LED按键,对应的圆形指示灯亮三秒自动熄灭,同时单片机模块上对应的LED灯也是亮三秒自动熄灭。
C.当按下“流水灯”确定按钮,单片机上的8个LED灯按流水灯形式亮一次。
D.当按下“全灯闪烁”确定按钮,单片机上8个LED灯一齐闪烁三次。
E.当按下停止按钮,程序退出。
2.硬件连接
本设计通过“PL2303的USB转串口线”把“STC89C52RC单片机小系统模块”(附带8个LED灯)的串口与笔记本电脑的“USB口”相连!
3.软件设计
A.C51程序部分设计
使用KEIL软件编写下位机程序,即写入到单片机的程序。
程序代码如下:
#include
typedef unsigned char uchar;
typedef unsigned int uint;
//****************************************IO端口定义***************************************
sbit L ED1=P2^0;
sbit L ED2=P2^1;
sbit L ED3=P2^2;
sbit L ED4=P2^3;
sbit L ED5=P2^4;
sbit L ED6=P2^5;
sbit L ED7=P2^6;
sbit L ED8=P2^7;
uchar RX_Byte=0;
//************************************串口初始化*********************************************************
void StartUART( void )
{ //波特率4800
SCON = 0x50;
TMOD = 0x20;
TH1 = 0xFA;
TL1 = 0xFA;
PCON = 0x00;
TR1 = 1;
}
//************************************通过串口将数据发送给PC端**************************************
void TX_S_Byte(uchar TX_Byte)
{
SBUF = TX_Byte;
while( TI == 0 ); //查询法
TI = 0;
}
//************************************通过串口接收PC端的数据**************************************
void RX_S_Byte(void)
{
while( RI == 0 ); //查询法
RX_Byte = SBUF ;
RI = 0;
}
//*********************ms延时函数*************************************** void Delay(uint x)
{
uint i,j;
for(i=0;i for(j=0;j<110;j++); } //************************跑马灯函数*************************** void loop_led(void) { uchar i,j; for(i=0;i<1;i++) { P2=0xfe; Delay(500); for(j=0;j<7;j++) { P2<<=1; P2|=0x01; Delay(500); } } } //****************************全灯闪烁***************************** void shan(void) { uchar i; for(i=0;i<3;i++) { P2=0; Delay(500); P2=0xff; Delay(500); } } //************************************主函数************************************************************ void main(void) { uchar TX_data=0x0f;//定义发送数据 StartUART();//串口初始化 P2=0xff;//8个LED灯初始化,全灭 Delay(100);//延时100ms while(1)//主循环 { RX_S_Byte();//接收串口数据 switch(RX_Byte)//匹配数据,执行对应分支操作 { case 0x01: LED1=0;Delay(3000);LED1=1;break;//LED1灯亮3S熄灭 case 0x02: LED2=0;Delay(3000);LED2=1;break; //LED2灯亮3S熄灭 case 0x03: LED3=0;Delay(3000);LED3=1;break; //LED3灯亮3S熄灭 case 0x04: LED4=0;Delay(3000);LED4=1;break; //LED4灯亮3S熄灭 case 0x05: LED5=0;Delay(3000);LED5=1;break; //LED5灯亮3S熄灭 case 0x06: LED6=0;Delay(3000);LED6=1;break; //LED6灯亮3S熄灭 case 0x07: LED7=0;Delay(3000);LED7=1;break; //LED7灯亮3S熄灭 case 0x08: LED8=0;Delay(3000);LED8=1;break; //LED8灯亮3S熄灭 case 0x09: loop_led();P2=0xff;break;//8个LED灯执行流水灯一次后全灭 case 0x0a: shan();break;//8个LED灯闪烁3次 default: break;//乱码跳出 } } } https://www.360docs.net/doc/ec1489273.html,BVIEW程序部分设计 1.在前面板添加以下几个控件:8个圆形指示灯、10个确定按钮(8个为LED按钮,2个为功能启动按钮)、VISA资源名称(新式—I/O—VISA资源名称)、停止按钮 2.切换到程序框图窗口,先在上面添加以下两个函数: 串口配置函数和串口关闭函数。其中串口配置函数中有几个配置端,分别需要配置串口的波特率、数据位数、奇偶校验位数、停止位数。注:需在函数连线端子右键菜单创建常量,此方法比自己创建常量方便且可靠性更强。然后按下图连接,那么,你的VI 串口配置就完成了。注:“串口关闭函数”作用是退出主循环后关闭串口! 3.添加一个While循环结构,作为主循环。把停止按钮连接到循环停止端,为真则退出循环。 4.在循环结构内添加一个条件结构,在内添加一些函数(如下图),作为事件1即前面板上按下对应一个LED的按键,前面板和单片机模块上的LED灯亮3S自动熄灭。 其中涉及到一个“串口写入”函数(仪器IO—串口—VISA配置串口—串口写入)。 5.其它9个事件与事件1并列(无先后顺序,故不用事件结构,但用着也无妨)且类同,不再具体赘述,整个程序框图连接见下图。 注: 1.本设计涉及到的串口部分函数都在“仪器IO—串口—VISA配置串口”子版块中可以找到。 2.使用串口等其它标注接口做VI时,必须先安装NI-VISA驱动,链接上面已给出。 3.单片机模块必须使用11.0592的晶振(为产生标准波特率,防止通讯出错)。 LabVIEW单片机通讯 1.串口扩展的问题: 先说一下串口的扩展问题,一般的台式机或工控机上都至少有二个串口,一般都是够用的,但是现在市场上已经很难找到带串口的笔记本了,而有时候在外出调试时需要在笔记本中使用到串口的,这时一般是使用USB-RS232的转接线,价格从十几到一百多都有,很多朋友反应在使用价格低的转接线时会出现乱七八糟的问题,而贵一点的线就很少听说有其它问题的,所以大家在使用便宜的USB-RS232转接线时要特别注意线的质量,遇到一些奇怪的问题时先考虑换一根好一点的线。PCI-RS232扩展卡也同理,便宜的卡也容易出问题,尽量买好一点的,以免因小失大。PCI-RS232一般至少能扩展2个串口,有些BT一点的可以扩展到8-16个,一堆线和接头。转接线和扩展卡一般是要装驱动的。 2.串口功能的确认: 在使用串口之前,最好先确认一下串口是否正常,特别是使用转换接或扩展卡的。检查的方法很简单,就是将串口的2、3脚短接起来,3脚是发送数据,2脚接收数据,就是这个串口自发自收。电脑上的串口软件一般是用串口调试助手,很出名的,也好用。如下图所示:图1 串口调试助手 打开软件,选择已经短接好的串口号,点击“手动发送”,如果串口是好的,2、3脚又短接起来了,马上就可以在上面的接收框里看到接收的数据就是发送的数据。稍微要注意一下的是有些电脑的COM1和COM2的位置是反过来的,所以要确定好串口调试助手左上角的串口上择的是已经短接的那一个,如果COM1没接收到,可以再先COM2再发一次看一下。 3.串口线的检查: 检查好串口后,一般也要注意一下使用的串口线,标准的串口线是9根线都是用上的,但有一些是只使用了三根线的:2、3、5。第3个脚管是发送,第2个管脚接收,另一个5是地线,这里叫它简化的串口线,简化的串口线能用上的地方,标准的串口线也肯定能用上,因为标准线的9根线已经包括了简化串口线中的3根线,但标准串口线能用上的地方,简化串口线就不一定能用上,所以在使用串口线之间一定要确定好串口线的类型,一般买的串口线都是标准线,但自制的串口线因为应用场合不同就要先确定一下。 G串口线还有一个地方需要注意一下的,就是2、3脚的接法,标准接法中是2、3脚交叉的,即这边的2接另一边的3,这边的3接另一边的2,扭了一下,所以叫交叉线,因为正常使用时,这边第二脚是发送数据,另一边第三脚是接收数据,所以要将这二个管脚连接起来,这样才能正常使用。但是有些情况下,2、3是直连的,即这边的第2脚连接另一边的第2脚,第3脚连接第3脚,这种叫直连线,这种线一般是用于延长串口的,比如需要将工控机的串口接头引到机柜表面上时,就使用这种线,这样机柜表面的串口线的定义还是跟电脑接出来的一样,外面的那一根串口线再使用交叉线。从电脑主板上将串口引到主机后面板上的线就是这样的直连线。购买串口线的时候一般也会问你买直连的还是交叉的,要区别对待。 串口线还有一个要稍微注意一下的就是DB头,因为电脑上接出来的一般是公头(针),要跟电脑接的话要母头(孔),一般仪器的串口也是公头,所以二边都是母头的串口线比较常见。串口的接头一般是DB9的,也有DB25的,但比较少用,有些比较BT的仪器厂家居然用RJ11(水晶头那种)作为串口头,让人不爽! 总之,使用串口前一定要先确定好硬件没问题,不然很浪费时间的。 4.串口参数设置: 在LabVIEW中使用串口时,有几个参数比较重要,需要先说明一下的。一个是串口初始化这个节点的“终止符”和“禁用终止符?”这二个输入端,这二个输入端是相互作用的,“终止符”默认值为10,它的十六进制是“0x0A”,这是一个ASCII码,是一个换行符,可以从LabVIEW中的字符串的不同显示形式看出来,如下图: 运动控制的基础 概观本教程是在NI测量基础系列的一部分。每个在这个系列的教程,教你一个常用的测量应用的特定主题的解释理论概念,并提供实际的例子。在本教程中,学习运动控制系统的基础知识,包括软件,运动控制器,驱动器,电机,反馈装置,I / O。您还可以查看交互式演示,通过本教程的材料在自己的步伐。有关更多信息,返回到NI测量基础主页。目录运动控制系统的组成部分软件配置,原型设计,开发运动控制器移动类型电机放大器和驱动器汽车和机械要素反馈装置和运动的I / O NI相关产品运动控制系统的组成部分图1显示了一个运动控制系统的不同组件。图1。运动控制系统组件应用软件-您可以使用应用软件,以命令的目标位置和运动控制型材。运动控制器-运动控制系统的大脑作用到所需的目标位置和运动轨迹,并建立电机的轨迹遵循,但输出±10 V的伺服电机或步进和方向脉冲信号,步进电机。 放大器或放大器(也称为驱动器)驱动器-从控制器的命令和需要开车或关闭电机的电流产生。电机-电机机械能变成电能和生产所需的目标位置移动到所需的扭矩。机械部件-电机的设计提供一些力学的扭矩。这些措施包括线性滑轨,机械手臂,和特殊的驱动器。反馈装置或位置传 感器-位置反馈装置是不是需要一些运动控制应用(如步进电机控制),但重要的是为伺服电机。反馈装置,通常是一个正交编码器,感应电机的位置和结果报告控制器,从而结束循环的运动控制器。软件配置,原型设计,开发应用软件分为三大类:配置,原型和应用程序开发环境(ADE)。图2说明了运动控制系统的编程过程和相应的NI产品设计过程:图2。运动控制系统开发过程组态 做的第一件事情之一,是您的系统配置。为此,美国国家仪器公司提供测量与自动化浏览器(MAX),不仅运动控制,但所有其他NI硬件配置的交互式工具。对于运动控制,MAX 提供交互式的测试和调整面板,帮助您验证系统功能之前,你的程序。图3 NI MAX是一个交互式工具,用于配置和调整您的运动控制系统。 应用笔记 了解伺服调谐 使用1D互动的环境测试电机功能 轴运动控制器的配置 轴运动控制器设置 运动控制器的编码器设置 运动控制器的参考设置 数字运动控制器的I / O设置原型 当你配置你的系统,你可以开始原型和开发应用程序。在 串口通信的基本概念 串口通信的基本概念 1,什么是串口? 2,什么是RS-232? 3,什么是RS-422? 4,什么是RS-485? 5,什么是握手? 1,什么是串口? 串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal Serial Bus或者USB混淆)。大多数计算机包含两个基于RS232的串口。串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。同时,串口通信协议也可以用于获取远程采集设备的数据。 串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米; 而对于串口而言,长度可达1200米。 典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参 数必须匹配: a,波特率:这是一个衡量通信速度的参数。它表示每秒钟传送的bit的个数。例如300波特表示每秒钟发送300个bit。当我们提到时钟周期时,我们就是指波特率例如如果协议需要4800波特率,那么时钟是4800Hz。这意味着串口通信在数据线上的采样率为4800Hz。通常电话线的波特率为14400,28800和36600。波特率可以远远大于这些值,但是波特率和距离成反比。高波特率常常用于放置的很近的仪器间的通信,典型的例子就是GPIB 设备的通信。 b,数据位:这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据不会是8位的,标准的值是5、7和8位。如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准 ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,术语“包”指任何通信 的情况。 检测技术与仪表实验 课程设计 题 目 基于labview 的智能家居控制设计 姓 名 徐鑫涛 黄敏瑶 学 号 3100404112 3100404129 专业班级 10电气工程及自动化2班 任课教师 李园/钟伟红 分 院 信息科学与工程学院 完成日期 2012年12月20日 宁波理工学院 摘要 随着嵌入式技术的发展和高速宽带网络的普及, 利用网络实现远程监控已为人们广泛接受,嵌入式网络监控技术正是在此条件下逐步发展成熟起来的. 用户使用Web 浏览器,通过以太网远程访问内置Web 服务器的监控摄像机, 不但可以实现对现场的远程视频监控, 而且可以向监控现场发送指令. 在整个系统的实现过程中, 嵌入式Web 服务器起着十分重要的作用,实现智能化离不开运算和控制单元。 本文中,我们探讨实现室内外温度,湿度,光照强度的智能控制采用虚拟仪器技术,数据采集并测得电气物理量,如电压、电流、温度等,基于数据采集以及labview仿真,通过软硬件与计算机的结合,实现了测量的自动化并提供可分析数据,对于温度程序的核心思想,其实就是利用这个系统能够根据温度的变化做出相应的处理,比如说外部温度比设定的温度高那么我就需要让制冷设备发挥作用来降低温度,设置相关反馈环节,基于LabView的温度控制系统,主要讲述控制系统软件方面的设计,首先对温度传感器采集到的温度信号(转化并处理为电压信号)输入到采集卡模拟输入端口,采集卡将信号送入LabView程序处理后从模拟输出端输出相关有效的PWM调制波形,实现了测量的自动化并提供可分析数据,实现使室内的温度、湿度、光照度等保持一个基本平衡的状态的智能化系统。 Internet向普通家庭生活不断扩展,消费电子、计算机、通讯一体化趋势日趋明显,现代智能家居由于其安全、方便、高效、快捷、智能化等特点在21 世纪将成为现代社会和家庭的新时尚。当家庭智能网关将家庭中各种各样的家电通过家庭总线技术连接在一起时,就构成了功能强大、高度智能化的现代智能家居系统。而基于嵌入式系统的家庭智能系统在国内才刚刚出现,随着嵌入式技术更加广泛的应用,随着成本的逐步降低,中国的智能家居最终将走向嵌入式。 关键词:温度反馈嵌入式系统 labview 数据采集 基于LabVIEW的控制系统仿真 摘要 在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。 文中详细介绍了该实验教学系统的设计思路与设计过程。主体部分是对系统各个子模块的理论分析、相应的算法分析和虚拟仪器程序的编写,此外还涉及程序的动态调用和发布应用程序等内容。 关键词:控制系统;仿真;LabVIEW;倒立摆;实时交互 Simulation of Control System Based on LabVIEW Abstract In the teaching and experimental process of control theory, there exist problems such as equipment shortages, monotonous teaching methods and etc. We can use Virtual Instrument to solve these problems effectively. This paper introduces the significance and research status of the control system simulation, puts forward and determines the implement scheme of the Control System Simulation Based on LabVIEW. Use NI's products (LabVIEW 2009, Control Design Toolkit) as software development tools to realize computer simulation of the control system modeling, analysis and design process. After writing programs and publishing applications, we can achieve an interactive experimental and teaching system. The system consists of four sub-modules: signal generator, typical elements, the mass-spring-damper system and the single inverted pendulum system. Users can do research in control system modeling, performance analysis, PID design, LQR design and other aspects. Each sub-module of the system runs well, the whole system has the features as follows: simple, friendly interface and real-time interactive. It will provide the teaching and experiment field with reform and innovation. This paper describes the thinking and design process of the system in details. Theoretical analysis and algorithm analysis for the sub-module and Virtual Instrument programs writing are the main parts. It also discusses the dynamic program invocation and publishing applications and so on. Keywords:Control System; Simulation; LabVIEW; Inverted Pendulum; Real-Time Interaction 基于A VR单片机和LabVIEW的丝杆步进电机运动控制系统 A VR单片机为核心的嵌入式系统,配备专用步进电机驱动器实现对丝杆步进电机运动的控制工作,LabVIEW软件构建虚拟仪器系统并创建友好交互界面。单片机和LabVIEW之间确定串口通信规则,使LabVIEW能够发送相应字符串到单片机从而实现对丝杆步进电机启停、运动方向、运动步数的直接控制,并能够读取电机相关运动状态。文章设计的丝杆电机运动控制系统具有工作稳定,易于操作和可移植性强的特点。 标签:单片机;LabVIEW;步进电机;串口通信 1 概述 丝杆步进电机,又称线性步进电机,由于其特殊的机械机构和工作机理,在日常实验研究及工业生产等相关领域发挥着越来越大的作用。随着技术的不断发展创新,对于丝杆步进电机运动的控制方法已经不仅仅只限于单种技术的使用,而是多技术混合,结合各自的独特优势来实现最优化的系统设计。本系统以A VR 单片机为核心搭建硬件工作电路,LabVIEW软件创建虚拟仪器系统,解决了步进电机工作噪声较大,控制操作不便等问题。 2 系统组成 系统主要由装有LabVIEW软件的计算机,A VR单片机、电机驱动器和丝杆步进电机组成,系统组成框图如图1所示。 其中本系统中选用美国国家仪器(NI)公司研制开发的2014版LabVIEW 软件,LabVIEW是一种图形化的编程语言的开发环境,可以方便地建立自己的虚拟仪器,利用其编写的上位机程序控制下位机;下位机选用ATMEL公司中8位系列单片机的ATmega128系列单片机,该款单片机稳定性极高,功耗也很低,单片机与计算机之间通过USB线连接;电机驱动器选用TB6600型号的两相式步进电机驱动器,可实现正反转控制,通过3位拨码开关选择7档细分控制,3位拨码快关选择8档电流控制,能达到低振动、小噪声、高速度的效果;丝杆步进电机选用机身长度40mm,相电流1.7A,保持转矩43N·cm,导程8mm的42丝杆步进电机。 3 系统功能实现 本系统是一种丝杆步进电机运动控制系统,最终可通过LabVIEW直接发送控制丝杆步进电机启停、运动方向以及运动步数的命令,并能读取电机相关运动状态。要完成上述功能需要单片机硬件控制电机、单片机与LabVIEW串口通信和LabVIEW状态机三个基本功能的实现。 3.1 单片机硬件控制电机 基于LabVIEW的几种简单测量与控制系统 李鹏雄徐熙炜 指导老师:俞熹 (复旦大学物理系上海 200433) 摘要:本文介绍了虚拟仪器的概念,LabVIEW的概念、来源、特点以及应用,着重讨论了几种简化的实用测量与控制系统。对红绿灯系统提出改进,使其更接近于生活中的实际情况。最后有对本实验的理解。 关键词:虚拟仪器 LabVIEW 计算机实测与控制温度计光强红绿灯 一.引言 虚拟仪器(Virtual Instruments)指的是用计算机软件将计算机硬件与仪器硬件结合在一起,利用计算机强大的计算以及模拟能力和仪器设备实现控制和测量的目的的工具。区别于传统的仪器,虚拟仪器没有一套固定的设备、固定的外观和功能等,其很大一部分功能是依赖于计算机来实现的。所以虚拟仪器往往能缩小体积,减少硬件成本。 LabVIEW是实验室虚拟仪器集成环境(Laboratory Virtual Instrument Engineering Workbench)的简称,是美国国家仪器公司(NATIONAL INSTRUMENTS,简称NI)的创新软件产品。其功能是用编程的方法创建虚拟仪器,但是和传统的编程不同的是,它使用的是图形化的程序语言,称为“G”语言,编写的程序后缀为.VI。使用这种语言编程时,基本上不写程序代码,取而代之的是图标和流程图。它尽可能利用了技术人员、科学家、工程师所熟悉的术语、图标和概念,因此,LabVIEW是一个面向最终用户的工具。LabVIEW集成了与满足GPIB、VXI、RS-232 和RS-485协议的硬件及数据采集卡通讯的全部功能。它还内置了便于应用TCP/IP、ActiveX等软件标准的库函数。这是一个功能强大且灵活的软件。使用它进行原理研究、设计、测试并实现仪器系统时,可以大大提高工作效率。它广泛地被工业界、学术界和研究实验室所接受,视为一个标准的数据采集和仪器控制软件。它也是目前应用最广、发展最快、功能最强的图形化软件集成开发环境。 二.LabVIEW下的几种简单测量与控制系统 使用LabVIEW开发平台编制的程序称为虚拟仪器程序,简称为VI。VI包括三个部分:程序前面板、框图程序和图标/连接器。程序前面板用于设置输入数值和观察输出量,用于模拟真实仪表的前面板。而每一个程序前面板都对应着一段框图程序。框图程序用LabVIEW图形编程语言编写,可以把它理解成传统程序的源代码。图标/连接器是子VI被其它VI调用的接口。 1.温度计 温度计程序是一个典型的测量用虚拟仪器。 图1就是温度计程序的前面板,可以看到上面有酒精温度计的图案,数字显示,还有两个显示电压和温度的框,以及一个停止按钮。 成绩评定表 课程设计任务书 目录 1 目的及基本要求 (1) 2 基本原理 (1) 2.1程序原理 (1) 2.2设计步骤 (1) 3 电梯控制设计和仿真 (2) 3.1 总体程序设计 (2) 3.2 控件描述 (3) 3.3 子程序设计 (4) 4 结果及性能分析 (6) 4.1 运行结果 (6) 4.2 性能分析 (7) 参考文献 (7) 1 目的及基本要求 熟悉LabVIEW开发环境,掌握基于LabVIEW的虚拟仪器原理、设计方法和实现技巧,运用专业课程中的基本理论和实践知识,采用LabVIEW开发工具,实现国际象棋设计和仿真。 基本要求: 本程序是参照日常电梯使用规则而设计的,实现的功能是:程序运行后,可以选择要去的层数一层或者多层,电梯会从低到高的依次在已选择的层数停下来,然后在继续到下一个被选中的层数停下,当都已选楼层停下后,按钮会灭掉,回到一层,等待下一次的楼层选择。本程序基于电梯的特点利用LabVIEW制作的一款简单的电梯控制程序。 2 基本原理 2.1程序原理 设计上可大致分为以下几个部分: 1)主面板部分即电梯主界面的设置 2)控件部分即按钮的设置 3)控制部分就是通过操作按键来控制电梯移动 4)逻辑部分进行判断电梯走动没有,是否运行,同时布尔灯的亮灭 5)显示部分就是将电梯所到层数显示出来 运行原理: 程序运行后,首先规定电梯停在大楼的一层,然后根据右边所点亮的布尔控件上显示的数字层数,电梯经过时间的判断开始运行,向上或者向下移动,到达所选的楼层后,电梯停止,布尔灯灭掉,继续向下一个所选的楼层移动,直到所有的所选楼层全部停完后, 先是英文资料,后面有详细的中文资料。 https://www.360docs.net/doc/ec1489273.html,/devzone/cda/tut/p/id/2897 Serial Instrument Control Tutorial 目录 1.Overview of Serial Bus 2.Connecting and Setting up a Serial Instrument Control System 3.How to Create a VISA Resource for the Instrument in MAX 4.Instrument Control Software Articles and Related Links Overview of Serial Bus Serial is a common device communication protocol for instrument control because most computers and many remote instruments include at least one serial port. Single applications can be used across a variety of instruments with few modifications, reducing programming and test time. For more information on the serial protocol, including information on transfer speeds and important parameters, please refer to Serial Communication Overview. Connecting and Setting up a Serial Instrument Control System 苏州大学机电工程学院 Soochow University of Mechanical and Electrical Engineering 课程设计报告 Curriculum design 课题名称:基于LabVIEW软件的PID自动控制学院: ********院 专业:********* 姓名:*** 学号:**** 目录 一、PID控制原理 (1) 1、PID控制介绍 (1) 2、PID控制规律 (1) 3、PID 控制的性能指标 (3) 4、PID 控制器参数整定的分类 (3) 5、PID相关控制 (5) 6、数字PID (7) 二、LabVIEW8.5软件 (9) 1、简介 (9) 2、特点 (10) 3、虚拟仪器 (11) 4、应用领域 (12) 三、前期练习题目与内容 (14) 四、设计内容与要求 (17) 1、设计内容 (17) 2、设计要求 (17) 五、设计方案 (18) 1、设计思路 (18) 2、程序框图设计 (20) 3、控制面板设计 (21) 六、最终设计结果及运行情况 (22) 1、程序框图 (22) 2、控制面板 (22) 七、课程设计心得 (25) 基于LabVIEW软件的PID自动控制 一、PID控制原理 1、PID 控制介绍 PID 控制是过程控制中广泛应用的一种控制,简单的说就是按偏差的比例(proportional)、积分(Integral)、微分(Derivative)进行的控制。当今,尽管各种高级控制在不断的完善,但目前在实际生产过程中应用最多的仍是常规PID 控制,其原因是: 1) 各种高级控制在应用上还不完善; 2) 大多数控制对象使用常规PID 控制即可以满足实际的需要; 3) 高级控制难以被企业技术人员掌握。 PID 控制器具有结构简单,参数易于调整等优点。在长期的工程实践中,人们对PID控制己经积累了丰富的经验。特别是在那些实际过程控制中,控制对象的精确数学模型难以建立,系统参数又经常发生变化,常采用PID 控制器,并根据经验进行在线整定。 以下将从PID 控制规律、PID 控制的性能指标及PID 控制参数整定三个方面对PID 控制做进一步的介绍。 2、PID 控制规律 PID(Proportional,Integral and Differential)控制器是一种基于“过去”,“现在”和“未来”信息估计的简单算法。 LabVIEW串口通信详解 串口可以说是我们最容易见到,也最容易接触到的一种总线,台式机上一般都有二个,而现在很多下位机、仪器等很多都还是使用串口通信的。论坛上很多朋友都经常会使用到串口,并遇到一些问题,这里有必要做一个详细的说明,以方便广大会员朋友,文章请勿转载到其它地方,谢谢。 论坛上早先发布过一个贴子,叫《串口WORD资料》,里面有一些中英文的串口的资料,这个文章是对那个资料的补充,如果是初接触串口的朋友建议先看一下上一个贴子先。上一个贴子中提到过的内容这里不再进行补充。 首先补充一个比较重要的问题,就是在LabVIEW中使用串口的话一定要先安装VISA这个驱动,然后生成的EXE运行时也需要在目标机上安装VISA Runtime Engine,可以在打包时一起打包。 VISA的驱动可以在NI网站上下载到:https://www.360docs.net/doc/ec1489273.html,/nidu/cds/view/p/id/1605/lang/zhs 1.串口扩展的问题: 先说一下串口的扩展问题,一般的台式机或工控机上都至少有二个串口,一般都是够用的,但是现在市场上已经很难找到带串口的笔记本了,而有时候在外出调试时需要在笔记本中使用到串口的,这时一般是使用USB-RS232的转接线,价格从十几到一百多都有,很多朋友反应在使用价格低的转接线时会出现乱七八糟的问题,而贵一点的线就很少听说有其它问题的,所以大家在使用便宜的USB-RS232转接线时要特别注意线的质量,遇到一些奇怪的问题时先考虑换一根好一点的线。PCI-RS232扩展卡也同理,便宜的卡也容易出问题,尽量买好一点的,以免因小失大。PCI-RS232一般至少能扩展2个串口,有些BT一点的可以扩展到8-16个,一堆线和接头。转接线和扩展卡一般是要装驱动的。 2.串口功能的确认: 在使用串口之前,最好先确认一下串口是否正常,特别是使用转换接或扩展卡的。检查的方法很简单,就是将串口的2、3脚短接起来,3脚是发送数据,2脚接收数据,就是这个串口自发自收。电脑上的串口软件一般是用串口调试助手,很出名的,也好用。如下图所示:图1 串口调试助手 打开软件,选择已经短接好的串口号,点击“手动发送”,如果串口是好的,2、3脚又短接起来了,马上就可以在上面的接收框里看到接收的数据就是发送的数据。稍微要注意一下的是有些电脑的COM1和COM2的位置是反过来的,所以要确定好串口调试助手左上角的串口上择的是已经短接的那一个,如果COM1没接收到,可以再先COM2再发一次看一下。 3.串口线的检查: 检查好串口后,一般也要注意一下使用的串口线,标准的串口线是9根线都是用上的,但有一些是只使用了三根线的:2、3、5。第3个脚管是发送,第2个管脚接收,另一个5是地线,这里叫它简化的串口线,简化的串口线能用上的地方,标准的串口线也肯定能用上,因为标准线的9根线已经包括了简化串口线中的3根线,但标准串口线能用上的地方,简化串口线就不一定能用上,所以在使用串口线之间一定要确定好串口线的类型,一般买的串口线都是标准线,但自制的串口线因为应用场合不同就要先确定一下。 G串口线还有一个地方需要注意一下的,就是2、3脚的接法,标准接法中是2、3脚交叉的,即这边的2接另一边的3,这边的3接另一边的2,扭了一下,所以叫交叉线,因为正常使用时,这边第二脚是发送数据,另一边第三脚是接收数据,所以要将这二个管脚连接起来,这样才能正常使用。但是有些情况下,2、3是直连的,即这边的第2脚连接另一边的第2脚,第3脚连接第3脚,这种叫直连线,这种线一般是用于延长串口的,比如需要将工控机的串口接头引到机柜表面上时,就使用这种线,这样机柜表面的串口线的定义还是跟电脑接出来的一样,外面的那一根串口线再使用交叉线。从电脑主板上将串口引到主机后面板上的线就是这样的直连线。购买串口线的时候一般也会问你买直连的还是交叉的,要区别对待。 串口线还有一个要稍微注意一下的就是DB头,因为电脑上接出来的一般是公头(针),要跟电脑接的话要母头(孔),一般仪器的串口也是公头,所以二边都是母头的串口线比较常见。串口的接头一般是DB9的,也有DB25的,但比较少用,有些比较BT的仪器厂家居然用RJ11(水晶头那种)作为串口头,让人不爽! 总之,使用串口前一定要先确定好硬件没问题,不然很浪费时间的。 4.串口参数设置: 在LabVIEW中使用串口时,有几个参数比较重要,需要先说明一下的。一个是串口初始化这个节点的“终 基于LabVIEW的控制系统仿真毕业设计 目录 1 绪论......................................................................................................................................... I 1.1 课题背景 ....................................................................................................................................... - 1 - 1.2 控制系统仿真的意义.................................................................................................................... - 1 - 1.3 控制系统仿真的研究现状............................................................................................................ - 2 - 1.4 本课题研究内容 ........................................................................................................................... - 2 - 2 LabVIEW概述 .................................................................................................................. - 4 - 2.1 虚拟仪器技术 ............................................................................................................................... - 4 - 2.2 控制设计工具包 ........................................................................................................................... - 5 - 3 系统方案的选定............................................................................................................... - 7 - 3.1 系统概述 ....................................................................................................................................... - 7 - 3.2 系统方案的比较与选定................................................................................................................ - 7 - 3.3 系统子模块的规划........................................................................................................................ - 9 - 4 系统设计......................................................................................................................... - 10 - 4.1 信号发生器 ................................................................................................................................. - 10 - 4.1.1 确定方案 ............................................................................................................................. - 10 - 4.1.2 VI设计................................................................................................................................. - 10 - 4.2 典型环节 ..................................................................................................................................... - 13 - 4.2.1 建模及理论分析 ................................................................................................................. - 13 - 4.2.2 VI设计................................................................................................................................. - 14 - 4.3 质点-弹簧-阻尼器系统.......................................................................................................... - 18 - 4.3.1 建模与模型转换及其VI设计........................................................................................... - 18 - 4.3.2 模型分析及其VI设计....................................................................................................... - 21 - 4.3.3 PID设计及其VI设计......................................................................................................... - 25 - 4.4 一级倒立摆系统 ......................................................................................................................... - 29 - 4.4.1 建模与分析及其VI设计................................................................................................... - 30 - 4.4.2 LQR设计及其VI设计....................................................................................................... - 36 - 4.4.3 实时仿真及其VI设计....................................................................................................... - 41 - 4.5 动态调用VI的设计 ................................................................................................................... - 44 - 4.5.1 VI的动态调用..................................................................................................................... - 44 - 4.5.2 VI设计................................................................................................................................. - 45 - Labview虚拟仪器课程设计 The Design of Temperature Measurement System Based on Virtual Instrument Technology 题目 : LAB VIEW 在交通灯中的应用 指导老师 : 刘宏 专业班级 : 电子091班 姓名 : 杨晓燕 学号 : 15 实习时间 : 2012.9.24-2012.9.28 Labview在交通灯中的运用 一、概论 实现路口信号灯控制系统的方法很多,可以用可编程控制器PLC、单片机、标准逻辑器件等实现。但其功能修改及调试都需要硬件电路的支持,在一定程度上增加了设计难度。提出基于labview的智能交通灯控制系统,可实现3种颜色灯的交替点亮、各种信息提示、实时监测交通灯工作状态等功能。不仅编程简单、灵活、可靠性高,而且成本低、具有良好的经济效益。为实现交通系统智能控制提供了一条新途径。 近年来,在快速城市化进程和经济发展的影响下,城市交通迅速增长,交通问题成为困扰许多大城市发展的通病,已成为日趋严峻的国际性问题。其中,十字路口则是造成交通堵塞的主要”瓶颈”。世界发达国家都在积极探索如何最大限度地发挥道路通行能力,尽量减少交通堵塞造成的各种损失。实现十字路口信号灯控制系统的方法有很多,可以通过可编程控制器PLC、单片机、标准逻辑器件等方案实现。但是这些控制方法的功能修改及调试都需要硬件电路的支持,在一定程度上增加了设计难度,提高了设计成本。随着计算机技术的迅猛发展,虚拟仪器技术在数据采集、自动测试和仪器控制领域得到广泛应用,促进并推动测试系统和测量控制的设计方法与实现技术发生了深刻的变化。”软件就是仪器”已经成为测试与测量技术发展的重要标志。 我设计了基于labview的智能交通灯控制系统,该系统可实现3种颜色灯的交替点亮,通过信息提示指挥车辆和行人安全通行,并能实时监测交通灯工作状LabVIEW与单片机通讯
运动控制的基础
Labview串口通信开发实例(值得拥有)
基于labview的智能家居控制设计
基于LabVIEW的控制系统仿真
基于AVR单片机和LabVIEW的丝杆步进电机运动控制系统
基于LabVIEW的几种简单测量与控制系统.
基于labview的电梯控制设计
Labview串口
基于LabVIEW软件的PID自动控制
非常好--LabVIEW串口通信详解
基于LabVIEW的控制系统仿真毕业设计
基于labview的交通灯控制