飞行器自动控制导论_第三章飞行器的运动方程
第三章飞行器的运动方程 3.1 刚体动力学方程的推导 1.刚体飞行器运动的假设
1)认为飞行器不仅是刚体,而且质量是常数;
2)假设地面为惯性参考系,即假设地面坐标为惯性坐标; 3)忽略地面曲率,视地面为平面; 4)假设重力加速度不随飞行高度而变化;
5)假设机体坐标系的z o x --平面为飞行器对称平面,且飞行器不仅几何外形对称,而且内部质量分布亦对称,惯性积0==zy xy I I 2.旋转坐标系中向量的导数
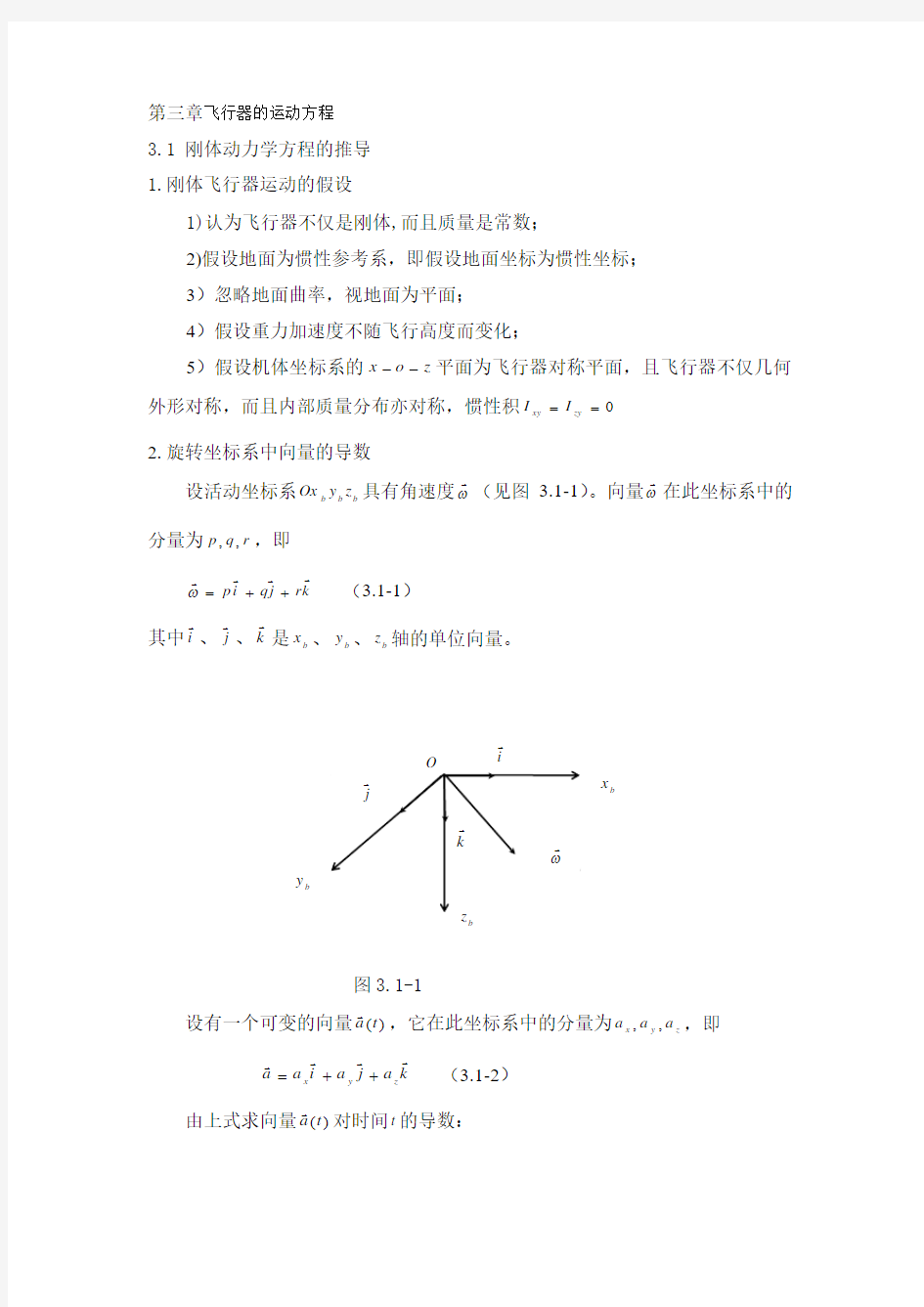
设活动坐标系b b b z y Ox 具有角速度ω (见图3.1-1)。向量ω
在此坐标系中的分量为r q p ,,,即
k r j q i p
++=ω (3.1-1)
其中i
、j
、k
是b x 、b y 、b z 轴的单位向量。
图3.1-1
设有一个可变的向量)(t a
,它在此坐标系中的分量为z y x a a a ,,,即
k a j a i a a z y x
++= (3.1-2)
由上式求向量)(t a
对时间t 的导数:
b x
ω
b y
b z
O
i
j
k
dt
k d a dt j d a dt i d a k dt da j dt da i dt da dt a
d z y x z y
x
+++++= (3.1-3)
从理论力学知,当一个刚体绕定点以角速度ω
旋转时,刚体上任何一点P 的速度为
r
dt r d ?=ω (3.1-4)
其中r
是从
O 点到P 点的向径。
现在,把单位向量i
看作是活动坐标系中一点P
的向径,于是可得:
i dt
i d
?=ω (3.1-5)
同理可得:
j dt
j d
?=ω (3.1-6) k dt
k d
?=ω (3.1-7)
将式(3.1-5)、(3.1-6)及(3.1-7)代入式(3.1-3)中,可得:
)(k a j a i a k dt
da j dt da i dt da dt a
d z y x z y x
++?+++=ω (3.1-8) 或写为:
a
t
a dt
a d
?+=
ωδδ (3.1-9)
其中k dt da j dt da i dt da t a
z y x
++=δδ t
a
δδ 称为在活动坐标系中的“相对导数”,相当于站在此活动坐标系中的观察
者所看到的向量a 的变化率。而dt
a
d
则称为“绝对导数”,相当于站在固定坐标系
中的观察者所看到的向量a 的变化率。例如,若a 是某点的向径,则t
a
δδ
代表该
点的相对速度(相对于动坐标系),而
dt
a
d 则代表该点的绝对速度。
3.在机体坐标系(活动坐标系)中刚体飞行器质心动力学方程
由牛顿第二定律得:
i V m dt
d F |)( =∑
(3.1-10)
式中:F
——外力
m ——物体的质量 V
——物体的速度
i
|——表示相对于惯性坐标系
在图3.1-2中,考察飞机上的一个质量元m δ。
图3.1-2 飞机上的质量元 列出牛顿第二定律方程
dt
V d m F
δδ= (3.1-11)
式中:F
δ——作用在质量元上的外力
V
——质量元相对惯性坐标系的速度
作用在飞机上总的外力是这些微元的和,即
F F =∑δ
(3.1-12)
质量元的速度为
dt
r
d V V c +
= (3.1-13)
b
b z
式中:c V
——飞机的质心的速度;
dt
r d ——微元相对于质心的速度。
将式(3.1-13)代入式(3.1-11),两边求和得:
m
dt
r
d V dt d F F c δδ)( +∑==∑ (3.1-14)
假设飞机的质量是常数,式(3.1-14)可改写为
m dt
r
d dt d dt V d m F c δ ∑+= (3.1-15)
或
m r dt
d
dt V d m F c δ ∑+=22 (3.1-16)
由于r
是从质心度量,所以和式0=∑m r δ
。式(3.1-16)简化为
dt
V d m F c
= (3.1-17) 这个方程把作用在飞机上的外力和飞机质心的运动联系起来。
由式(3.1-9)得
)(|c B c V m dt
V d m F
?+=ω
(3.1-18)
ω
,,V F 用机体坐标系上的分量表示为
k F j F i F F z y x
++= (3.1-19)
k r j q i p
++=ω (3.1-20)
k w j v i u V c
++= (3.1-21)
则有:
?
??
??-+=-+=-+=)()()(qu pv w
m F pw ru v
m F rv qw u
m F z y x (3.1-22)
这就是在机体坐标系(活动坐标系)下刚体飞行器质心动力学方程。 4.在机体坐标系(活动坐标系)中刚体飞行器绕质心转动的力矩方程。
由牛顿第二定律得:
i
H dt
d M | =∑ (3.1-23)
式中: M
——外力矩
H ——物体的动量矩(角动量) i
|——表示相对于惯性坐标系
用类似方法。对于质量微元m δ,力矩方程可以写为
m
V r dt d H dt d M δδδ)( ?== (3.1-24)
质量微元的速度可以用质心的速度和质量元相对于质心的速度表达,即
r
V dt
r
d V V c c ?+=+=ω (3.1-25)
总的动量矩可以写作
m
r r m V r m
r V r m V r H H c c δωδδωδδ)()()]([)(
??∑+?∑=?+?∑=?∑=∑= (3.1-26)
速度c V
对于求和来说是常数,可以拿到求和符号的外面,即
m r r V m r H c δωδ)]([
??∑+?∑= (3.1-27)
式(3.1-27)中的第一项为0,因为0=∑m r δ
,前面已经解释过。 设
k z j y i x r
++=
(3.1-28)
将式(3.1-20)和(3.1-28)代入(3.1-27),得
k
m y x r m yz q m xz p j m yz r m z x q m xy p i
m xz r m xy q m z y p H
])([])([])([2
22
22
2δδδδδδδδδ+∑+∑-∑-+∑-+∑+∑-+∑-∑-+∑=
(3.1-29)
如果定义
m z y I x δ)(2
2
+∑=,m xy I xy δ∑=,m z x I y δ)(2
2+∑=
(3.1-30)
xzdm I xz ∑=,m y x I z δ)(2
2+∑=,m yz I yz δ∑=
(3.1-31)
则有
??
?
??+--=-+-=--=z yz
xz
z yz y xy y
xz
xy
x
x rI qI
pI
H rI qI pI H
rI
qI
pI H (3.1-33)
由式(3-9)得
H dt
H d M B
?+=ω| (3.1-34)
设
k N j M i L M
++=
(3.1-35)
将式(3-20)、(3-35)代入式(3-34),则有
??
?
?
???
-+=-+=-+=x y
z
z x
y
y
z
x
qH pH H N pH rH
H
M rH
qH
H
L
(3.1-36)
因为假设xz 平面是飞机的对称平面,所以
0==xy yz I I
(3.1-37)
将式(3.1-33)、(3.1-37)代入(3.1-36),得
?
?
?
??
+-++-=-+-+=--+-=qr I I I pq r I p I N r p I I I rp q
I M pq I I I qr r I p
I L xz x y z xz xz z x y xz y z xz x )()()()(22 (3.1-37) 3.2 飞行器的运动学方程 3.2.1 飞行器的线运动方程
1)由地面坐标系g S 绕g z 轴转动偏航角ψ到过渡坐标系''''z y Ox S -,转换关系为
??
?
?
?
?????????????
??-=??????????g g g z y x z y x 10
0cos sin 0sin cos '''ψψψψ
(3.2-1) 2)由过渡坐标系''''z y Ox S -绕'y 轴转动θ到过渡坐标系''''''''z y Ox S -,转换关系为
????
?
???????????????-=??????????'''cos 0
sin 010sin 0cos ''''''z y x z y x θθ
θθ
(3.2-2)
3)由过渡坐标系''''''''z y Ox S -绕''x 轴转动滚转角φ到机体坐标系b S ,转换关系为
???
?
?
???????????????-=??????????''''''cos sin 0
sin cos 0001z y x z y x φφ
φφ (3.2-3)
由地面坐标系g S 到机体坐标系b S ,转换关系为
??
?
??
?????????????
??
-++--=??
??
?
???????????????-??????????-??????????-=??????????g g
g g g g z y x z y x z y x φθφ
ψφψθφ
ψφψθφθφψφψθφψφψθθ
ψ
θψθψψ
ψψ
θθθθ
φφ
φφcos cos sin cos cos sin sin sin sin cos cos sin sin cos cos cos sin sin sin cos sin sin cos sin sin sin cos cos cos 10
0cos sin 0sin cos cos 0
sin 010
sin 0cos cos sin 0
sin cos 00
01
(3.2-4)
由机体坐标系b S 到地面坐标系g S ,转换关系为
??
?
?
?
?????????????
??--++-=????
?
???????
?
??
?
????-++--=??????????z y
x z y x z y x T
g g g φθφ
θθ
φψφψθφ
ψφψθψθφψφψθφψφψθψθφθφ
ψφψθφψφψθφ
θφψφψθφψφψθθ
ψ
θψθcos cos sin cos sin sin cos cos sin sin cos cos sin sin sin sin cos sin sin cos cos sin cos sin sin cos sin cos cos cos cos sin cos cos sin sin sin sin cos cos sin sin cos cos cos sin sin sin cos sin sin cos sin sin sin cos cos cos (3.2-5)
对式(3.2-5)两边对t 求导得:
???????
?
???
?
??????????????--++-=??????
?
?????????dt
dz
dt dy
dt
dx
dt
dz dt dy dt dx g g g
φθφ
θθφψφψθφ
ψφψθψθφψφψθφψφψθψθcos cos sin cos sin sin cos cos sin sin cos cos sin sin sin sin cos sin sin cos cos sin cos sin sin cos sin cos cos (3.2-6)
或
??
?
?
?
???????????????--++-=??????
?
?????????w v u dt
dz dt dy dt dx g g g φθφ
θθφψφψθφ
ψφψθψθφψφψθφψφψθψθcos cos sin cos sin sin cos cos sin sin cos cos sin sin sin sin cos sin sin cos cos sin cos sin sin cos sin cos cos
(3.2-7)
由速度坐标系的定义可建立速度坐标系与地轴系间的转换关系:
??
?
??
?????????????
??
-++--=??????????g g
g a a a z y x z y x μγμ
χμγχμ
χμγχμγμχμγχμχμγχγ
γ
χγχcos cos sin cos cos sin sin sin sin cos sin cos sin cos cos cos sin sin sin cos sin sin sin cos sin cos sin cos cos (3.2-8)
由速度坐标系的定义可建立速度坐标系与机体轴系间的转换关系:
??
?
?
?
?????????????
??---=??????????z y x z y x a a a αα
βαββαβαββ
αcos 0
sin sin sin cos sin cos cos sin sin cos cos (3.2-9)
式(3.2-9)中的转换矩阵右乘(3.2-4)的转换矩阵也表示从地轴系向速度轴系的转换,与式(3.2-8)中转换矩阵相等,由此可得下列几何关系式。
??
???
?
?--=+++-+=+-=θ
φβφβαθβαγμψθφφψβθψφφψβαθψβαγχθ
φβφβαθβαγcos )sin cos cos sin (sin sin sin cos cos sin )sin sin sin cos (cos sin )sin sin cos sin cos (cos sin cos sin cos cos cos sin cos )sin sin cos cos (sin sin cos cos sin (3.2-10) 3.2.2 飞行器的角运动方程
角速度分量(r q p ,,)与姿态角变化率(ψφθ ,,)之间的几何关系如图3.2-1所示。
图3.2-1 角速度分量(r q p ,,)与姿态角变化率(ψφθ ,,)之间的几何关系 飞机三个姿态角变化率的方位如下:
ψ
——沿g oz 轴的向量,向下为正。
θ
——在水平面内与ox 轴在水平面内投影线相垂直,向右为正。
φ
——沿ox
轴的向量,向前为正。
为了得到姿态角变化率与绕机体轴三个角速度间的转换关系,将三个姿态角变化率向机体轴上投影,得
?
??
??
+-=+=-=φθψφθφθψφθθ
ψφcos cos sin sin cos cos sin r q p (3.2-11)
或
???
?????????????????--=??????????ψθφ
φθφ
φθφθ
cos cos sin 0
sin cos cos 0sin 01r q p (3.2-12)
从式(3.2-12)可以解出姿态角变化率
??
??
?
??????????????
?-=??????????r q p θφθ
φφφθφθφψθφ
sec cos sec sin 0sin cos 0tan cos tan sin 1 (3.2-13) 积分这个方程可以求出欧拉角(姿态角)
应当指出,θ ,φ 和ψ
在一般情况下并不是互相垂直的正交向量,但r
q p ,,却互
相垂直的正交,并有
k r j q i p
++=++=ψφθω (3.2-14) 3.3重力和推力
重力通过质心作用在飞机上,由于机体坐标系固定在质心上所以重力不产生力矩。它作为外力作用在飞机上,并沿机体坐标轴产生分量。
重力沿机体坐标轴的分量为
?
??
??==-=φ
θφθθcos cos sin cos sin mg G mg G mg G z y x (3.3-1) 推进系统产生的推力可能沿体坐标轴的各方向产生分量。此外,如果推力不通过质心,也可能产生力矩。图3.3-1表示推进系统可能产生的力矩的例子。
图3.3-1 推力系统产生的力和力矩
作用在机体坐标系的推力和力矩为
T P x X F =)(,T P y Y F =)(,T P z Z F =)( (3.3-2)
T T Tz M =
T T y T T N )(21-=
现将飞行器的动力学方程和运动学方程总结如下: 力方程:
???
??-+=+-+=+-+=-)(sin cos )(sin cos )(sin qu pv w m mg Z pw ru v
m mg Y rv qw u
m mg X φθφθθ (3.3-3) 力矩方程:
?
?
?
??
+-++-=-+-+=--+-=qr I I I pq r I p I N r p I I I rp q
I M pq I I I qr r I p
I L xz x y z xz xz z x y xz y z xz x )()()()(22 (3.3-4) 绕质心转动的运动学方程
机体角速度用欧拉角和欧拉角速度表示:
???
?????????????????--=??????????ψθφ
φθφ
φθφθ
cos cos sin 0
sin cos cos 0sin 01
r q p (3.3-5)
欧拉角速度用欧拉角和机体角速度表示:
??
?
?
?
??????????????
?-=??????????r q p θφθ
φφφθφθφψθφ
sec cos sec sin 0sin cos 0tan cos tan sin 1 (3.3-6)
飞行器质心运动的运动学方程
??
?
?
?
???????????????--++-=??????
?
?????????w v
u dt
dz dt dy dt dx g g g
φθφ
θθφψφψθφ
ψφψθψθφψφψθφψφψθψθcos cos sin cos sin sin cos cos sin sin cos cos sin sin sin sin cos sin sin cos cos sin cos sin sin cos sin cos cos (3.3-7) 3.4 小扰动原理
3.1节导出的方程可以通过小扰动原理进行线性化。在小扰动原理中,需假定飞机的运动只在稳定飞行条件附近具有小的偏离。很明显,这个原理不能用于大幅度运动的问题。但是在很多情况下,小扰动原理对于实际工程能得到足够的精度。
动力学方程中的所有变量用一个基准值加上一个偏差或扰动代替,即
?????
??
???+=?+=?+=?+=?+=?+=?+=?+=?+=?+=?+=?+=?+=δ
δδ0000000000000,,,,
,,,,
L L L N N N M M M Z Z Z Y Y Y X X X r r r q q q p p p w w w v v v u u u (3.4-1) 作为一个例子,考虑x 方向力方程,即
)(sin rv qw u
m mg X -+=- θ (3.4-2) 把小扰动变量代入上面方程,得
]
)(())(()([
)sin(0000000v v r r w w q q u u dt
d m mg X X ?+?+-?+?++?+=?+-?+θθ (3.4-3)
如果忽略扰动量的乘积,并假定
00000000=======ψφr q p v w (3.4-4)
则有
u
m mg X X ?=?+-?+)sin(00θθ (3.4-5) 因为
θ
θθθθθ?+?=?+sin cos cos sin )sin(000
假设θ?比较小,可以认为θθθ?≈?≈?sin ,1cos 所以式(3.4-6)可化为
u
m mg X X ?=?+-?+)cos (sin 000θθθ (3.4-7) 如果假定上式中的扰动量为0,得到基准飞行条件为
0sin 00=-θmg X (3.4-8)
用上式代入(3.4-7),得
u
m mg X ?=?-?0cos θθ (3.4-8) 其中X ?是x 方向的空气动力和推力,可以用台劳级数展开。
如果假定X ?只是T e w u δδ,,,的函数,则X ?可以表示为
T T
e e
X X w w
X u u
X X δδδδ???+
???+
???+
???=
? (3.4-9)
其中
u
X ??、
w
X ??、
e
X δ??、
T
X δ??为稳定性导数,在基准飞行条件下计算。e δ?、T
δ?分别为升降舵角度和油门位置的变化。
将式(3.4-9)代入式(3.4-8),得
u
m mg X X w w
X u u
X T T
e e
?=?-???+
???+
???+
???0cos θθδδδδ (3.4-10) 整理后得
T T
e e
X X mg w w
X u u X dt d m
δδδδθθ???+
???=
?+???-
???-)cos ()(0 (3.4-11)
两边除以质量m ,得到更为方便的形式,即
T e w u T e X X g w X u X dt
d δδθθδδ?+?=?+?-?-)cos ()(0 (3.4-12)
其中m u
X X u /??=
,m
w
X X
w
/??=等,都是空气动力导数除以飞机的质量。
下面列出空气动力和力矩的台老级数展开式。
????
???
?
????+???+???+???+???+???=????+???+???+???=????+???+???+???=?T T
e
e r r
T
T
e e Z
Z q q Z w w Z w w Z u u Z Z Y r r Y p p Y v v Y Y X X w w X u u X X δδδδδδδδδδ (3.4-13) ????
???
?????+???+???+???+???=????+???+???+???+???+???=????+???+???+???+???=?a a
r
r T T
e
e a
a
r r L N r r N p p N v v N N M
M q q M w w M w w M u u M M L L r r L p p L v v L L δδδδδδδδδδδδ (3.4-14) 空气动力和力矩可以表示为所有运动变量的函数,但是在上面的方程中只把那些有显著影响的项包含进来。
同理可以得到其它线性化方程。下面归纳如下: 纵向通道
???
?
?
?
????+?=?-+?+-?-?+?=?-+-?--+?-?+?=?+?-?-T e q w w u T e q
w w u T e w u T e T e T e M M dt d M dt d w M dt d M u M Z Z g dt d Z u w Z dt d Z u Z X X g w X u X dt d
δδθδδθθδδθθδδδδδδ)()(]sin )[())1[()cos ()(2
2
000 (3.4-15)
横侧向通道
???
?
??????+?=?-+?+-?-?+?=?+-?-+?-?=?-?-+?-?-r a r p
z xz v r a r x xz p
v r r p v r a r a r N N r N dt d p N dt d I I v N Z L r L dt d I I p L dt d v L Y g r Y u p Y v Y dt d
δδδδδφθδδδδδ)()()()()cos ()()(00(3.4-16)
飞行器总体设计试题
一、填空题(25分,每空1分) 1. 飞机设计可分为3个阶段,分别是 (1) 、 (2) 、 (3) 。 2. 最重要的三个飞机总体设计参数是 (4) 、 (5) 、 (6) 。 3. 飞机空机重量可分为3部分,分别是 (7) 、 (8) 、 (9) ,飞机空机重量系数随起飞重量的增加而 (10) 。 4. 在飞机重心的第一次近似计算中,如果飞机重心不在规定的范围内,则须对飞机重心进行调整。调整飞机重心最常用的2种方法是 (11) 、 (12) 。 5. 超音速进气道的压缩方式有3种,分别是: (13) 、 (14) 和 (15) 。 6. 喷气式飞机在 (16) 状态下达到最远航程,此时其翼载荷为 (17) ;螺旋桨飞机在 (18) 状态下达到最远航程,此时其翼载荷为 (19) (假设飞机的极曲线为)。 7. 要缩短飞机起飞/着陆滑跑距离,可以采用 (20) 翼载荷 的方法。 8. 亚音速飞机的最大升阻比取决于 (21) 。 9. 进气道总压恢复系数是 (22) 与 (23) 之比。 10. 从飞机设计的角度来看,对发动机的主要设计要求可归结为2个方面,即要求发动机的 (24) 大和 (25) 大。 二、选择题(20分,每题1分,正确的选择“+”,错误的选择“-”) 1. 减小翼载荷对飞机的巡航性能有利。 2 0y x x C A C C ?+=
(+) (-) 2. 将喷气式发动机安装到飞机上,需要考虑装机修正和推进装置阻力。(+) (-) 3. 进气道的功用是将流入进气道的空气减速增压。(+) (-) 4. 机身结构重量大致与机身浸湿面积成正比。(+) (-) 5. 现代战斗机上常使用高涵道比的涡扇发动机。(+) (-) 6. 飞机起飞重量一定时,增加飞机的航程和航时会降低飞机的机动性。(+) (-) 7. 飞机的寿命周期成本包括研制成本和使用维护成本两部分。(+) (-) 8. 如技术水平一定,则飞机设计要求都要以一定的重量代价来实现。(+) (-) 9. 飞机的载油量是根据飞机所执行任务的任务剖面要求确定的。(+) (-) 10. 超音速飞行时,涡轮风扇发动机的耗油率小于涡轮喷气发动机。(+) (-) 11. 前三点式起落架几何参数选择时,应考虑的主要因素之一是防止飞机翻倒和防止飞机倒立。(+) (-) 12. 飞机起落架的重量一般占该机起飞重量的15%左右。(+) (-) 13. 雷达隐身飞机要求减小镜面反射和角反射器反射。(+) (-) 14. 按面积律设计的飞机能减小跨音速波阻。(+) (-) 15. 满足设计要求的起飞重量最小的飞机是设计先进的。(+) (-) 16. 设计要求不变时,结构重量增加1千克使飞机起飞重量也增加1千克。(+) (-)
(完整版)航空概论
飞行器:在地球大气层内飞行和在地球大气层外空间飞行的器械之总称。 飞艇:有动力装置、可控制飞行的轻于空气额航空器。 声速:声速是弱扰动波的传播速度。 阻力:阻力是与飞行方向相反的空气动力分量。 最大平飞速度:最大平飞速度是指一架水平飞行的飞机在一定的距离内,发动机推力最大时,所能达到的最大平衡速度。 最小平飞速度:最小平飞速度是指飞机保持平飞所必需的最低速度。 起飞阶段:地面滑跑——离地——爬升降落阶段:下滑——拉平——平飘——滑跑 战斗机的主要任务是消灭空中和地面敌机、夺取制空权。按重量可分为轻型战斗机和重型战斗机。 轻于空气的航空器:气球、飞艇重于空气的航空器:固定翼航空器、旋翼航空器、其他航空器;固定翼航空器:滑翔机、伞翼机、飞机;旋翼航空器:直升机、旋翼机。 飞机按用途来分类:军用飞机、民用飞机、研究机。飞机飞行必经起飞和着陆两个阶段。小速度着陆很平稳,大速度着陆不舒服。 速度和风的关系:空气动力和物体的运动速度密切相关,遵守相对运动原理、连续性原理、伯努利定理。 阻力可分为摩擦阻力和压差阻力两种。阻力是与飞行方向相反的空气动力分量。 垂直机动性:爬升性能、俯冲性能。 飞机的升限有两种:一种是理论升限,一种是实用升限。飞机上既有升力也有阻力。 平尾上的升降舵、垂尾上的方向舵和机翼上的副翼,是飞机上的三个主要操纵面。有飞机的横向操纵、飞机的纵向操纵、飞机的航向操纵。 飞机就不再能保持平飞,开始飘飞,直至坠下与地面接触,开始地面滑行。(机翼升力〈飞机重力飞机不再保持平飞) 气流通过激波时,速度骤然下降,压力、密度和温度骤然升高,但总温保持不变。 要使飞机稳定平飞,重力要等于升力。 冲压发动机没有涡轮和压气机,依靠高速迎面气流进入发动机后的减速来实现空气增压,然后在燃烧室中与燃料混合并燃烧,最后经尾喷管高速喷出而产生推力。 压气机的作用是提高进入燃烧室的空气的压力。 降低翼根弯距用于大型飞机。增大升力系数用于轻型飞机。 航空武器采用固体火箭发动机,速度高,但射程较短。采用涡喷/涡扇发动机射程较远,但速度较低。 利用前翼和机翼之间有利的涡干扰又可增大飞机升力,这些都有利于改善飞机的机动性。 燃气涡轮发动机分为涡轮喷气、涡轮风扇、涡轮螺旋桨、桨扇和涡轮轴发动机。燃气涡轮发动机主要由进气口、压气机、燃烧室、涡轮和尾喷管组成。 流体的状态参数:速度、温度、压力、密度;理想流体流速大的地方压强低,流速小的地方压强高;p+1/2p(密度)v平方=常数 飞机按用途来分类:军用飞机、民用飞机、研究机。教练机可分为:初级教练机、中级教练机、高级教练机。 直接反作用装置包括:火箭发动机、组合发动机、冲压发动机、涡轮风扇发动机、涡轮喷气发动机。 航空燃气涡轮发动机的主要性能指标有:推力/功率、推重比/功重比、耗油率;主要设计参数有:增压比、涡轮进口温度和涵道比等;衡量可靠性、耐久性的指标有:翻修寿命、空中停车率、机上时间、航班整点率。 发动机在飞机上的安装位置:1、安装在机身内2、安装在机翼下吊舱内3、安装在翼根内
飞行器总体设计报告1要点
大型固定翼客机分析报告 2014-4-28 学院:计算机科学与工程学院 201322060608 学号:马丽姓名:201322060629 号:学姓潘宗奎名: 目录
总结----马丽、潘宗奎............................................................ I 1 大型固定翼客机总体设计.................................................... - 1 - 1.1 客机参 数 ............................................................ - 1 - 1.2 飞机的总体布 局 ...................................................... - 1 - 1.2.1 飞机构型....................................................... - 1 - 1.2.2 三面图......................................................... - 2 - 1.2.3 客舱布置....................................................... - 2 - 2 客机的重量设计............................................................ - 4 - 3 大型固定翼客机的外形设计.................................................. - 6 - 3.1 翼 型 ................................................................ - 6 - 3.2 机翼平面形状的设 计 .................................................. - 7 - 3.3尾翼................................................................. - 8 - 4 重量分析................................................................. - 11 - 5 气动特性分析............................................................. - 13 - 6 性能分析................................................................. - 22 - 6.1 商载—航程 图 ....................................................... - 22 - 6.2 起飞距 离 ........................................................... - 23 - 6.3 进场速 度 ........................................................... - 24 - 6.4 着落距 离 ........................................................... - 24 -
飞机动力学模型建立
建立飞机飞行动力学模型 飞机的本体飞行动力学模型分为非线性模型和线性模型。如图所示,线 性模型常用于飞机的飞行品质特性分析和飞行控制律设计,而非线性模型通常用于飞机稳定性和操纵性特征的精确估计,从而进行各种非线性特征和线性模型的误差分析。另外,非线性模型还特别用在一些特殊的飞行任务,例如大迎角和快速机动飞行等线性模型不适用的场合。 建立全量非线性六自由度运动方程 (1)刚体飞机运动的假设['3]: ①飞机为刚体且质量为常数; ②固定于地面的坐标系为惯性坐标系; ③固定于机体的坐标系以飞机质心为原点; ④忽略地球曲率,即采用所谓的“平板地球假设”; ⑤重力加速度不随飞行高度变化; 以上假设是针对几云J<3,H<30加飞机的。 (2)坐标系说明: ①地面坐标轴系凡一O。x:夕。29:在地面上选一点09,使xg轴在水平面内并指向某一方向,z。轴垂直于地面并指向地心,yg轴也在水平面内并 垂直于x。轴,其指向按照右手定则确定,如图2一3(a) ②机体坐标轴系凡一d朴忆:原点O取在飞机质心处,坐标系与飞机固 连,x轴在飞机对称面内并平行于飞机的设计轴线指向机头,y轴垂直
于飞机对称面指向机身右方,:轴在飞机对称面内,与x轴垂直并指向机身下方,如图2一3(b)。 (3)刚体飞机的全量六自由度非线性运动方程为: 力方程组: 力矩方程组: 运动方程组:
导航方程组: 符号说明: 建立飞机小扰动线化方程 (l)基本假设: ①小扰动假设:我们把运动状态与飞机基准运动状态差别很小的扰动运动 称为小扰动运动。采用小扰动假设线化后的方程,在大多数情况下均能 给出足够满意的结果。这是因为:a、在大多数飞行情况下,各主要气 动参数的变化与扰动量成线性关系;b、飞行中即使遇到相当强烈的扰 动,在有限的时间内飞机的线速度和角速度也往往只有很小的变化量。 ②飞机具有对称面(气动外形和质量分布均对称)则且略去 机体内转动部件的陀螺力矩效应。 ③在基准运动中,对称平面处于铅垂位置(即θ=0), 且运动所在平面与飞机对称平面相重合(即β=O)。 在满足上述条件下,可以推论出:纵向气动力和力矩对横侧参数在其基准运动状态下的倒数均等于零。 横侧气动力和力矩对纵向运动参数在基准运动状态下的导数也均等于零。
骑士飞行棋实训报告
山东理工大学计算机学院 实训报告 《DOS界面开发基础实训》 班级 姓名 学号 指导教师 二○一二年七月五日 实训任务书及成绩评定 课题名称骑士飞行棋 Ⅰ、题目的目的和要求: 1、设计目的 本实训是实践性教学环节之一,旨在锻炼学生的实践操作能力和综合应用能力,希望通过案例实践,帮助学生掌握DOS界面的开发和应用,具备熟练使用C语言开发界面、感受游戏开发过程等。 2.要求学生掌握: (1)、C语言的规范、结构和标记。 (2)、数组、链表的定义和使用。 (3)、C语言的程序设计基础、面向对象编程、操作、事件处理和特效,感受游戏的开发过程等 (4)、综合应用各种前台技术开发DOS页面。 2、设计题目要求: 第一部分 游戏端首页 (1)角色的分配及及游戏规则: 游戏规则和传统的飞行棋一样,支持两人对战 采用100格小型游戏棋盘 游戏规则:对战双方轮流掷骰子控制自己的骑兵前进或后退,在游戏棋盘上设置有关卡普通 地雷 暂停 时空隧道
幸运轮盘(提供两种运气:交换位置和轰炸) 棋盘上的关卡只在骑兵第一次移动遇到时有效 (2)棋盘示例: 第二部分:游戏过程 (1)地图显示思路: 将对战地图划分成4个部分分别显示 奇数行:顺序输出地图数组中代号对应图像 右竖行:先输出空格,再输出数组中代号对应图像 偶数行:逆序输出地图数组中代号对应图像 (2)游戏进行中的界面 第三部分:游戏结束,玩家胜负已分 Ⅱ、设计进度及完成情况 日期内容 分析所给题目,初步划分侧重点,并初步制定流程 对所给题目进行详细的研究并细读有关资料 做出所给题目,讨论研究并调试检查错误, 对所给题目进行综合考虑,并进行再次修改 答辩,思考老师的评价 Ⅲ、系统实现--主要功能代码 void Welcome() { printf("※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※\n"); printf("操 2.孙权 3.刘备 \n"); printf("请玩家1选择角色:");个玩家轮流掷骰子,如果上轮走到暂停关卡,停掷一次\n\n"); printf("2.若玩家走到幸运轮盘,则和对方交换位置或者对方后退6步\n\n"); printf("3.若玩家走到某格,而对方也在此格,则对方退回原点\n\n"); printf("4.若遇到地雷后退6步\n\n"); printf("5.若遇到暂停则此玩家下一回合停止掷骰子\n\n"); printf("6.若遇到时空隧道再前进10步\n\n");
北航-飞行器总体设计期末整理
1.飞机设计的三个主要阶段是什么?各有些什么主要任务? ?概念设计:飞机的布局与构型,主要参数,发动机、装载的布置,三面图,初步估算性能、方案评估、参数选择与权衡研究、方案优化 ?初步设计:冻结布局,完善飞机的几何外形设计,完整的三面图和理论外形(三维CAD模型),详细绘出飞机的总体布置图(机载设备、分系统、载荷和结构承力系统),较精确的计算(重量重心、气动、性能和操稳等),模型吹风试验 ?详细设计:飞机结构的设计和各系统的设计,绘出能够指导生产的图纸,详细的重量计算和强度计算报告,大量的实验,准备原型机的生产 2.飞机总体设计的重要性和特点主要体现在哪些方面? ?重要性:①总体设计阶段所占时间相对较短,但需要作出大量的关键决策②设计前期的失误,将造成后期工作的巨大浪费③投入的人员和花费相对较少,但却决定了一架飞机大约80%的全寿命周期成本?特点(简要阐述) ①科学性与创造性:飞机设计要应用航空科学技术相关的众多领域(如空气动力学、材料学、自动控制、动力技术、隐身技术)的成果;为满足某一设计要求,可以由多种可行的设计方案。 ②反复循环迭代的过程 ③高度的综合性:需要综合考虑设计要求的各个方面,进行不同学科专业间的权衡与协调 3.B oeing的团队协作戒律 ①每个成员都为团队的进展与成功负责 ②参加所有的团队会议并且准时达到 ③按计划分配任务 ④倾听并尊重其他成员的观点 ⑤对想法进行批评,而不是对人⑥利用并且期待建设性的反馈意见 ⑦建设性地解决争端 ⑧永远致力于争取双赢的局面(win-win situations) ⑨集中注意力—避免导致分裂的行为 ⑩在你不明白的时候提问 4.高效的团队和低效的团队 1. 氛围-非正式、放松的和舒适的 2. 所有的成员都参加讨论 3. 团队的目标能被充分的理解/接受 4. 成员们能倾听彼此的意见 5. 存在不同意见,但团队允许它的存在 6. 绝大多数的决定能取得某种共识 7. 批评是经常、坦诚的和建设性的,不是针对个人的 8. 成员们能自由地表达感受和想法 9. 行动:分配明确,得到接受 10. 领导者并不独裁 11. 集团对行动进行评估并解决问题1. 氛围-互不关心/无聊或紧张/对抗 2. 少数团队成员居于支配地位 3. 旁观者难以理解团队的目标 4. 团队成员不互相倾听,讨论时各执一词 5. 分歧没有被有效地加以处理 6. 在真正需要关注的事情解决之前就贸然行动 7. 行动:不清晰-该做什么?谁来做? 8. 领导者明显表现出太软弱或太强硬 9. 提出批评的时候令人尴尬,甚至导致对抗 10. 个人感受都隐藏起来了 11. 集团对团队的成绩和进展不进行检查 5.飞机的设计要求有哪些基本内容? ①飞机的用途和任务 ②任务剖面 ③飞行性能 ④有效载荷⑤功能系统 ⑥隐身性能要求 ⑦使用维护要求 ⑦机体结构方面的要求 ⑦研制周期和费用 ⑦经济性指标 11环保性指标 6.飞机的主要总体设计参数有哪些? ①设计起飞重量W0 (kg)②动力装置海平面静推力T (kg)③机翼面积S (m2) 组合参数④推重比T/W0⑤翼载荷W0 /S (kg/m2) 7.毯式图的 步骤 ①保持推重比不变,改变翼载(x轴变量),获得总重曲线(y轴变量) ②推重比更改为另一个值后确定不变,改变翼载(x轴变量),获得总重(y轴变量)。同时需将y轴向左移动一任意距离。
飞机总体设计课程设计报告
国内使用的喷气式公务机设计 班级: 0111107 学号: 011110728 姓名:于茂林
一、公务机设计要求 类型 国内使用的喷气式公务机。 有效载重 旅客6-12名,行李20kg/人。 飞行性能: 巡航速度: 0.6 - 0.8 M 最大航程: 3500-4500km 起飞场长:小于1400-1600m 着陆场长:小于1200-1500m 进场速度:小于230km/h 据世界知名的公务机杂志B&CA发布的《2011 Purchase Planning Handbook》,可以将公务机按照价格、航程、客舱容积等数据分为超轻型、轻型、中型、大型、超大型。 根据设计要求,可以确定我们设计的公务机属于轻型公务机:价格在700-1800万美元、航程在3148-5741公里、客舱容积在8.5-19.8立方米的公务机。与其他公务机相比,轻型公务机主要靠较低的价格、低廉的运营成本、在较短航程内的高效率来取得竞争优势。 由此,从中选出一些较主流机型作为参考 二、确定飞机总体布局 1、参考机型 庞巴迪航空:里尔45xr、里尔60xr 巴西航空:飞鸿300、 塞斯纳航空:奖状cj3 机型座位数巡航速度M 起飞场长m 着陆场长m 航程km 最大起飞重量kg 里尔45XR 9 0.79 1536 811 3647 9752 里尔60XR 9 0.79 1661 1042 4454 10659 飞鸿300 9 0.77 1100 890 3346 8207 奖状CJ3 9 0.72 969 741 3121 6300
2、可能的方案选择: 正常式 前三点起落架 T型平尾 / 高置平尾 + 单垂尾 尾吊双发涡轮喷气发动机 / 翼吊双发喷气发动机 / 尾吊双发喷气发动机 小后掠角梯形翼+下单翼 / 小后掠角T型翼+中单翼 / 直机翼+上单翼 3、最终定型及改进 1)正常式、T型平尾、单垂尾 ①避免机翼下洗气流和螺旋浆滑流的影响:1、减小尾翼振动;2、减小尾翼结构疲劳;3、避免发动机功率突然增加或减小引起的驾驶杆力变化 ②“失速”警告(安全因素) ③外形美观(市场因素) ④由于飞机较小,平尾不需要太大,对垂尾的结构重量影响不大 2)小后掠角梯形翼(带翼梢小翼)、下单翼 ①本次公务机设计续航速度0.6-0.8M,处于跨音速范围,故采用小展弦比后掠翼,后掠角大约30左右,能有效地提高临界M数,延缓激波的产生,避免过早出现波阻。 ②翼梢小翼的功能是抵御飞机高速巡航飞行时翼尖空气涡流对飞机形成的阻力作用,提高机翼的高速巡航效率,同时达到节油的效果。 ③采用下单翼,起落架短、易收放、结构重量轻;发动机和襟翼易于检查和维修;从安全考虑,强迫着陆时,机翼可起缓冲作用;更重要的是,因为公务机下部无货物仓,减轻机翼结构重量。 3)尾吊双发涡轮喷气发动机,稍微偏上 ①主要考虑对飞机的驾驶比较容易,座舱内噪音较小,符合易操纵性和舒适性的要求。 ②机翼升力系数大 ③单发停车时,由于发动机离机身近,配平操纵较容易; ④起落架较短,可以减轻起落架重量。 ⑤由于机翼与客舱地板平齐有点偏高,为了使发动机的进气不受影响,故将发动机安排的稍稍偏上。 4)前三点起落架,主起落架安装在机翼上 ①适用于着陆速度较大的飞机,在着陆过程中操纵驾驶比较容易。 ②具有起飞着陆时滑跑的稳定性。 ③飞行员座舱视界的要求较容易满足。 ④可使用较强烈的刹车,缩短滑跑距离。
飞机总体设计大作业
飞机设计要求 喷气支线飞机 有效载荷:70人,75kg/人,每人行李重20kg 巡航速:0.7Ma 最大飞行高度:10000m 航程:2300km 待机时间:45分钟 爬升率:0~10000m<25分钟 起飞距离:1600m 接地速度<220km/h 一、相近飞机资料收集: 二、飞机构型设计 正常式布局:技术成熟,所积累资料丰富 T型尾翼:避开发动机喷流的不利干扰,但重量较重 机身尾部单垂尾 后掠翼:巡航马赫数0.7,后掠翼能有效提高临界马赫数,延缓激波的产生,避免过早出现波
阻 下单翼 :气动干扰经整流后可明显降低,结构布置容易,避免由于机翼离地太高而出现的问题 -发动机数目和安装位置:双发短舱式进气、尾吊布局,可以保持机翼外形的干净,流过机翼的气流免受干扰。 -起落架的型式和收放位置 :前三点 可以显著提高飞机的着陆速度,具有滑跑稳定性,飞行员视界要求易于满足,可以强烈刹车,有利于减小滑跑距离。安装于机身 三、确定主要参数 重量的预估 1.根据设计要求: –航程:Range =2800nm=5185.6km –巡航速度:0.8M –巡航高度:35000 ft=10675m ;声速:a=576.4kts=296.5m/s 2.预估数据(参考统计数据) –耗油率C =0.6lb/hr/lb=0.0612kg/(h·N)(涵道比为5) –升阻比L/D =14 3.根据Breguet 航程方程: ? ?? ? ? ??? ??= D L M C a R a n g e W W f i n a l i n i t i a l )l n ( 代入数据: Range = 1242nm ; a = 581 Knots (巡航高度35000ft) C = 0.5lb/hr/l b (涵道比为5) L/D = 14 M = 0.7 计算得: 115 .1=f i n a l i n i t i a l W W
飞行器控制实验报告剖析
H a r b i n I n s t i t u t e o f T e c h n o l o g y 飞行器制导与控制 实验报告 专业:自动化 班级: 学号:1120410333 姓名: 设计时间:2015/12/12
上机实验1: 使用四阶龙格库塔法求解微分方程 sin()ω=+dy t b dx (1) 先定义参数,ωb ,初值条件可以自己任取。 1. 源程序: function [x,y] = M1(fun,x0,xt,y0,PointNum) if nargin<4 | PointNum<=0 PointNum=100; end if nargin<3 y0=0; end y(1,:)=y0(:)'; h=(xt-x0)/(PointNum-1); x=x0+[0:(PointNum)]'*h; for k=1:(PointNum) f1=h*feval(fun,x(k),y(k,:)); f1=f1(:)'; f2=h*feval(fun,x(k)+h/2,y(k,:)); f2=f2(:)'; f3=h*feval(fun,x(k)+h/2,y(k,:)); f3=f3(:)'; f4=h*feval(fun,x(k)+h,y(k,:)); f4=f4(:)'; y(k+1,:)=y(k,:)+(f1+2*(f2+f3)+f4)/6; end 2、运行文件: x0=0; xt=2; Num=100; h=(xt-x0)/(Num-1); x=x0+[0:Num]*h; a=1; yt=1-exp(-a*x); fun=inline('-y+1','x','y'); y0=0; PointNum=100; [xr,yr]=M1(fun,x0,xt,y0,Num); M1_x=xr'
航空概论试题
航空概论试题 一、绪论部分 1、何谓国际标准大气? 因为大气物理性质(温度、密度、压强等)是随所在地理位置、季节和高度而变化的,为了在进行航空器设计、试验和分析时所用大气物理参数不因地而异,也为了能够比较飞机的飞行性能,所建立的统一标准。它也是由权威机构颁布的一种“模式大气”。 叫做国际标准大气。 2、何谓飞机机翼的展弦比?根梢比? 展弦比:翼展l和平均几何弦长bav的比值叫做展弦比,用λ表示,其计算公式可表示为:λ= l / bav。同时,展弦比也可以表示为翼展的平方于机翼面积的比值。 根梢比:根梢比是翼根弦长b0与翼尖弦长b1的比值,一般用η表示,η=b0/b1。 3、简答:大气层如何分层,各有什么特点?适合飞机飞行的大气 层是哪层? 以大气中温度随高度的分布为主要依据,可将大气层划分为对流层、平流层、中间层、热层和散逸层。( 1 )对流层温度随高度而降低,空气对流明显,集中了全部大气质量的约 3/4 和几乎全部的水气,是天气变化最复杂的层次,其厚度随纬度和季节而变化,低纬度地区平均 16-18km ,中纬度地区平均 10-12km ,高纬度地区平均 8-9km 。( 2 )平流层位于对流层之上,顶部到
50-55km ,随着高度增加,起初气温不变或者略有升高;到20-30km 以上,气温升高很快,可到 270k-290k ;平流层内气流比较稳定,能见度好。( 3 )中间层, 50-55km 伸展到 80-85km ,随着高度增加,气温下降,空气有相当强烈的铅垂方向的运动,顶部气温可低至 160k-190k 。( 4 )热层,从中间层延伸到 800km 高空,空气密度级小,声波已难以传播,气温随高度增加而上升,空气处于高度电离状态。( 5 )散逸层,是地球大气的最外层,空气极其稀薄,大气分子不断向星际空间逃逸。 飞机主要在对流层上部和同温层下部活动。 4、第一架飞机诞生的时间是哪一天? 1903年12月17日 5、目前世界上公认的第一个提出固定机翼产生升力理论的人是 谁?哪个国家的? 乔治·凯利,英国 6、飞行器一般分为几类?分别是什么? 三类:航空器;航天器;火箭和导弹 7、率先解决滑翔机的稳定和操纵方法的人是谁?哪个国家的? 李林达尔,德国 8、我国主要的飞机设计单位有哪些?其代表作品和内部代号是 什么? 601所沈阳飞机设计研究所歼八各型 602所中国直升机设计研究所(景德镇)直升机
飞行器总体设计教学大纲
《飞行器总体设计》教学大纲 学时数:64学时讲授 授课对象:飞行器设计工程专业大学本科 前期课程:理论力学、材料力学、结构力学、自动控制原理、空气动力学与 飞行性能计算 一、课程地位:本课程是飞行器设计工程专业必修的专业主干课,是一门综 合性、实践性很强的课程。它要求学生在学习本课程中总体设计知识的同时,紧 密结合前期课程中的基础理论,学习和掌握飞机总体设计的一般思路、原理和方法。促进学生把理论和知识、技能转化为飞机总体设计能力的结合点,是培养学 生分析工程实际问题和工程设计能力的重要环节。 二、课程任务:教授现代飞机总体的现代设计原理、综合设计思想理念和设 计技术;培养学生在综合运用广泛理论的基础上对工程实际问题的分析能力、分 析评价方法和设计能力,以及接受和适应深层次设计技术发展的能力;锻炼、培 养学生辩证逻辑思维、创造性思维和系统工程思维。 课程要求:在设计原理、概念、方法等基础方面强调系统全面、深刻精炼、 科学逻辑的有机结合,要使学生能真正掌握和运用;强调理论与实际的有机结合; 强调理论知识综合运用能力的培养,加强主动式教学,启发学生主观能动性,利 用现代技术的高信息含量使学生更多了解国内外飞机总体设计技术和前沿学科 的发展;最终使学生基本掌握现代飞机总体设计的先进设计思想、设计理论和设 计技术,着力于工程设计能力的培养。 三、课程内容: 第一章绪言(2) 1、理解“飞机总体设计”的基本含义,本课程的特点,以及学习本课程的 目的与任务。 2、初步建立如飞机设计阶段、特点等基本概念。 第二章设计的依据与参数选择(8) 1、了解飞机的设计要求 2、了解飞机的设计规范 3、熟悉飞机的总体技术指标 4、掌握飞机总体设计的参数选择
飞行控制系统大作业
《飞行控制系统》课程实验报告 班级 0314102 学号 031410224 姓名孙旭东 成绩 南京航空航天大学 2017年4月
(一)飞机纵向飞行控制系统的设计与仿真 1、分析飞机纵向动力学模态,求飞机的长周期与短周期阻尼与自然频率。 在MATLAB环境下导入数据文件,输入damp(alon),得出结果: Eigenvalue Damping Freq. (rad/s) -2.29e+000 + 4.10e+000i 4.88e-001 4.69e+000 -2.29e+000 - 4.10e+000i 4.88e-001 4.69e+000 -3.16e-002 1.00e+000 3.16e-002 -7.30e-003 + 3.35e-002i 2.13e-001 3.42e-002 -7.30e-003 - 3.35e-002i 2.13e-001 3.42e-002 长周期的根为 -7.30e-003 + 3.35e-002i 和 -7.30e-003 - 3.35e-002i 阻尼为 2.13e-001 自然频率为 3.42e-002(rad/s) 短周期的根为 -2.29e+000 + 4.10e+000i 和 -2.29e+000 - 4.10e+000i 阻尼为 4.88e-001 自然频率为 4.69e+000(rad/s) 2、对升降舵及油门单位阶跃输入下的飞机自然特性进行仿真,画出相应的状态曲线。 sys=ss(alon,blon,clon,dlon) [y,t]=step(sys,500) subplot(221) plot(t,y(:,1,1)) xlabel('t(s)') ylabel('\Deltau(m/s)') subplot(222) plot(t,y(:,1,2)) xlabel('t(s)') ylabel('\Deltau(m/s)') subplot(223) plot(t,y(:,2,1)) xlabel('t(s)') ylabel('\Delta\alpha(deg)') subplot(224) plot(t,y(:,2,2)) xlabel('t(s)') ylabel('\Delta\alpha(deg)')
飞行器设计与工程专业毕业实习报告范文
飞行器设计与工程专业 毕 业 实 习 报 姓名:杜宗飞 学号:2011090118 专业:飞行器设计与工程 班级:飞行器设计与工程01班指导教师:赵建明 实习时间:XXXX-X-X—XXXX-X-X 20XX年1月9日
目录 目录 (2) 前言 (3) 一、实习目的及任务 (3) 1.1实习目的 (3) 1.2实习任务要求 (4) 二、实习单位及岗位简介 (4) 2.1实习单位简介 (4) 2.2实习岗位简介(概况) (5) 三、实习内容(过程) (5) 3.1举行计算科学与技术专业岗位上岗培训。 (5) 3.2适应飞行器设计与工程专业岗位工作。 (5) 3.3学习岗位所需的知识。 (6) 四、实习心得体会 (6) 4.1人生角色的转变 (6) 4.2虚心请教,不断学习。 (7) 4.3摆着心态,快乐工作 (7) 五、实习总结 (8) 5.1打好基础是关键 (8) 5.2实习中积累经验 (8) 5.3专业知识掌握的不够全面。 (8) 5.4专业实践阅历远不够丰富。 (8) 本文共计5000字,是一篇各专业通用的毕业实习报告范文,属于作者原创,绝非简单复制粘贴。欢迎同学们下载,助你毕业一臂之力。
前言 随着社会的快速发展,用人单位对大学生的要求越来越高,对于即将毕业的飞行器设计与工程专业在校生而言,为了能更好的适应严峻的就业形势,毕业后能够尽快的融入到社会,同时能够为自己步入社会打下坚实的基础,毕业实习是必不可少的阶段。毕业实习能够使我们在实践中了解社会,让我们学到了很多在飞行器设计与工程专业课堂上根本就学不到的知识,受益匪浅,也打开了视野,增长了见识,使我认识到将所学的知识具体应用到工作中去,为以后进一步走向社会打下坚实的基础,只有在实习期间尽快调整好自己的学习方式,适应社会,才能被这个社会所接纳,进而生存发展。 刚进入实习单位的时候我有些担心,在大学学习飞行器设计与工程专业知识与实习岗位所需的知识有些脱节,但在经历了几天的适应过程之后,我慢慢调整观念,正确认识了实习单位和个人的岗位以及发展方向。我相信只要我们立足于现实,改变和调整看问题的角度,锐意进取,在成才的道路上不断攀登,有朝一日,那些成才的机遇就会纷至沓来,促使我们成为飞行器设计与工程专业公认的人才。我坚信“实践是检验真理的唯一标准”,只有把从书本上学到的飞行器设计与工程专业理论知识应用于实践中,才能真正掌握这门知识。因此,我作为一名飞行器设计与工程专业的学生,有幸参加了为期近三个月的毕业实习。 一、实习目的及任务 经过了大学四年飞行器设计与工程专业的理论进修,使我们飞行器设计与工程专业的基础知识有了根本掌握。我们即将离开大学校园,作为大学毕业生,心中想得更多的是如何去做好自己专业发展、如何更好的去完成以后工作中每一个任务。本次实习的目的及任务要求: 1.1实习目的 ①为了将自己所学飞行器设计与工程专业知识运用在社会实践中,在实践中巩固自己的理论知识,将学习的理论知识运用于实践当中,反过来检验书本上理论的正确性,锻炼自己的动手能力,培养实际工作能力和分析能力,以达到学以致用的目的。通过飞行器设计与工程的专业实习,深化已经学过的理论知识,提高综合运用所学过的知识,并且培养自己发现问题、解决问题的能力 ②通过飞行器设计与工程专业岗位实习,更广泛的直接接触社会,了解社会需要,加深
航天器总体设计作业【哈工大】
2017年《航天器总体设计》课程作业 1.嫦娥三号探测器航天工程系统的组成及各自的任务 嫦娥三号探测器由月球软着陆探测器(简称着陆器)和月面巡视探测器(简称巡视器)组成。 (1)探测器系统:主要任务是研制嫦娥三号月球探测器。嫦娥三号探测器由着陆器和巡视器组成。着陆月面后,在测控系统和地面应用系统的支持下,探测器携带的有效载荷开展科学探测。 (2)运载火箭系统:主要任务是研制长征三号乙改进型运载火箭,在西昌卫星发射中心,将嫦娥三号探测器直接发射至近地点高度200公里、远地点高度约38万公里的地月转移轨道。 (3)发射场系统:主要任务是由西昌卫星发射中心承担嫦娥三号发射任务。发射场系统通过适应性改造,具备长征三号乙改进型火箭的测试发射能力。 (4)测控系统:主要任务是对运载火箭、探测器在各个飞行阶段以及探测器在月面工作阶段的测控、轨道测量、月面目标定位以及落月后着陆器和巡视器的控制。 (5)地面应用系统:主要任务是根据科学探测任务,提出有效载荷配置需求;制定科学探测计划和有效载荷的运行计划,监视着陆器和巡视器有效载荷的运行状态,编制有效载荷控制指令和注入数据,完成有效载荷运行管理。 2.我国载人航天工程系统的组成及各自的任务 (1)航天员系统:主要任务是选拔、训练航天员,并在载人飞行任务实施过程中,对航天员实施医学监督和医学保障。研制航天服、船载医监医保设备、个人救生等船载设备。 (2)空间应用系统:主要任务是研制用于空间对地观测和空间科学实验的有效载荷,开展相关研究及应用实验。 (3)载人飞船系统:主要任务是研制“神舟”载人飞船。“神舟”载人飞船采用轨道舱、返回舱和推进舱组成的三舱方案,额定乘员3人,可自主飞行7天,具有出舱活动和交会对接功能,可与空间实验室和空间站进行对接并停靠飞行半年。 (4)运载火箭系统:主要任务是研制满足载人航天要求的大推力长征二号F型运载火箭,对长征系列
飞行器自动控制导论_第一章飞行控制系统概述
第一章飞行控制系统概述 1.1飞行器自动控制 1.1.1飞行控制系统的功能 随着飞行任务的不断复杂化,对飞机性能的要求越来越高,不仅要求飞行距离远(例如运输机),高度高(高空侦察机),而且还要求飞机有良好的机动性(例如战斗机)。为了减轻驾驶员在长途飞行中的疲劳,或使驾驶员集中精力战斗,希望用自动控制系统代替驾驶员控制飞行,并能改善飞机的飞行性能。这种系统就是现代飞机上安装的飞行自动控制系统。 飞行控制系统的功能归结起来有两点:1)实现飞机的自动飞行;2)改善飞机的飞行性能。 飞机的自动飞行控制系统在无人参与的情况下,自动操纵飞机按规定的姿态和航迹飞行,通常可实现对飞机的三轴姿态角和飞机三个方向的空间位置的自动控制与稳定。例如,无人驾驶飞行器(如无人机或导弹等),实现完全的飞行自动控制;对于有人驾驶的飞机(如民用客机或军用飞机),虽然有人参与驾驶,但某些飞行阶段(如巡航段),驾驶员可以不直接参与操纵,而由飞行控制系统实现对飞机飞行的自动控制,但驾驶员应完成对自动飞行指令的设置和监督自动飞行的情况,并可以随时切断自动控制而实现人工驾驶。采用自动飞行具有以下优点: 1)长距离飞行时解除驾驶员的疲劳,减轻驾驶员的工作负担; 2)在一些恶劣天气或复杂的环境下,驾驶员难于精确控制飞机的姿态和航迹,自动飞行控制系统可以精确对飞机姿态和航迹的精确控制; 3)有一些飞行操纵任务,驾驶员难于精确完成,如进场着陆,采用自动飞行控制则可以较好地完成任务。 一般来说,飞机的性能和飞行品质是由飞机本身气动特性和发动机特性决定的,但随着飞机飞行高度及飞行速度的增加,飞机的自身特性将会变坏。如飞机在高空飞行时,由于空气稀薄,飞机的阻尼特性变坏,致使飞机角运动产生严重的摆动,靠驾驶员人工操纵将会很困难。此外,设计飞机时,为了减小质量和阻力,提高有用升力,将飞机设计成静不稳定的。对于这种静不稳定的飞机,驾驶员是难于操纵的。在飞机上采用增稳系统或阻尼系统可以很好地解决这些问题。
飞机总体设计大作业
— 飞机设计要求 喷气支线飞机 有效载荷:70人,75kg/人,每人行李重20kg 巡航速: 最大飞行高度:10000m " 航程: 2300km 待机时间:45分钟 爬升率: 0~10000m<25分钟 起飞距离: 1600m \ 接地速度 <220km/h 一、相近飞机资料收集: 二、飞机构型设计 ^
正常式布局:技术成熟,所积累资料丰富 T 型尾翼:避开发动机喷流的不利干扰,但重量较重 机身尾部单垂尾 后掠翼:巡航马赫数,后掠翼能有效提高临界马赫数,延缓激波的产生,避免过早出现波阻 【 下单翼 :气动干扰经整流后可明显降低,结构布置容易,避免由于机翼离地太高而出现的问题 -发动机数目和安装位置:双发短舱式进气、尾吊布局,可以保持机翼外形的干净,流过机翼的气流免受干扰。 -起落架的型式和收放位置 :前三点 可以显著提高飞机的着陆速度,具有滑跑稳定性,飞行员视界要求易于满足,可以强烈刹车,有利于减小滑跑距离。安装于机身 三、确定主要参数 < 重量的预估 1.根据设计要求: –航程:Range =2800nm=5185.6km –巡航速度:0.8M –巡航高度:35000 ft=10675m ;声速:a==296.5m/s 2.预估数据(参考统计数据) –耗油率C =0.6lb/hr/lb=0.0612kg/(h·N)(涵道比为5) ¥ –升阻比L/D =14 3.根据Breguet 航程方程: ??? ????? ??=D L M C a Range W W final initial )ln( 代入数据: Range = 1242nm ;
四旋翼飞行器 设计报告
大学生电子设计竞赛 设计报告 摘要:本设计实现基于STM32开发板的十字形四旋翼飞行器,四旋翼由主控制板、陀螺仪、电机模块、超声波测距、电源和投弹打靶模块等六部分组成。其中,控制核心STM32负责飞行器姿态数据接收和飞行姿态控制;陀螺仪采用MPU6050模块,该模块经过卡尔曼滤波处理采集的数据,输出数据,用PID控制算法对数据进行处理,同时,解算出相应电机需要的的PWM增减量,及时调整电机转速,调整飞行姿态,使飞行器的飞行的更加稳定。电机模块通过电调控制无刷直流电机,超声波传感器进行测距,起飞后悬停在一定高度,打靶后降落。 关键词:四旋翼;PID控制;陀螺仪,姿态角,电机控制
2
目录 1系统方案 (1) 1.1控制系统选择方案 (1) 1.2飞行姿态控制方案论证 (1) 1.3角度测量模块的方案论证 (2) 1.4高度测量模块方案论证.............................................. 错误!未定义书签。2理论分析与计算 (2) 2.1控制模块 .................................................................... 错误!未定义书签。 2.2机翼电机 .................................................................... 错误!未定义书签。 2.3飞行姿态控制单元 (3) 3电路与程序设计 (4) 3.1系统总体设计思路 (4) 3.2主要元器件清单......................................................... 错误!未定义书签。 3.3系统框图 .................................................................... 错误!未定义书签。 3.3.1系统硬件框图 ..................................................... 错误!未定义书签。 3.3.2系统软件框图 ..................................................... 错误!未定义书签。4测试方案与测试结果.. (5) 5结论 (6) 3
飞机总体大作业——四代机方案设计1
飞行器总体设计大作业 歼-50(终结者) 小组成员:
目录 前言 (4) 第一章飞机设计要求 (4) 1.1 任务计划书性能指标 (4) 1.2发动机要求 (5) 1.3有效载荷 (5) 1.4任务剖面 (5) 1.4 概念草图 (6) 第二章总体参数估算 (7) 2.1起飞重量的计算 (7) 2.1.1飞机起飞重量的构成 (7) 2.1.2空机重量系数W e/W0的计算 (9) 2.2 发动机的耗油率C (10) 2.3 升阻比L/D (11) 由浸湿面积比估算出L/D约为13 (13) 2.4 燃油重量系数W f/W0 (13) 2.4.1飞机的典型任务剖面 (14) 2.4.2计算燃油重量系数W f/W0 (16) 2.4.3全机重量计算 (16) 2.5飞机升阻特性估算 (19) 2.5.1确定最大升力系数 (19) 2.5.2估算零升阻力系数C D0及阻力系数C D (20)
2.7 翼载荷的确定 (23) 第三章总体方案设计 (25) 3.1总体布局选择 (25) 3.1.1方案一:总体布局为三翼面布局 (25) 3.1.2方案二:总体布局为正常式布局 (25) 3.2机身布局 (25) 3.3发动机的类型、数目和布置: (26) 3.2进气道布置 (26) 3.3机翼布局 (27) 3.4尾翼布局 (27) 3.5起落架型式 (28) 3.6隐身设计 (28) 第四章部件设计 (29) 4.1机翼设计 (29) 4.1.1机翼具体参数的确定: (29) 4.1.2机翼的气动力特性 (33) 4.1.3机翼的增升装置和副翼 (34) 4.2机身设计 (38) 4.3尾翼及其操纵面的设计 (40) 4.4起落架设计 (42) 4.4.1起落架形式的选择: (42)