行星齿轮传动设计详解
1 绪论
行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。
1.1 发展概况
世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。
1.2 3K型行星齿轮传动
在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,
因而,该转臂H又可称为行星轮支架(简称为行星架)。
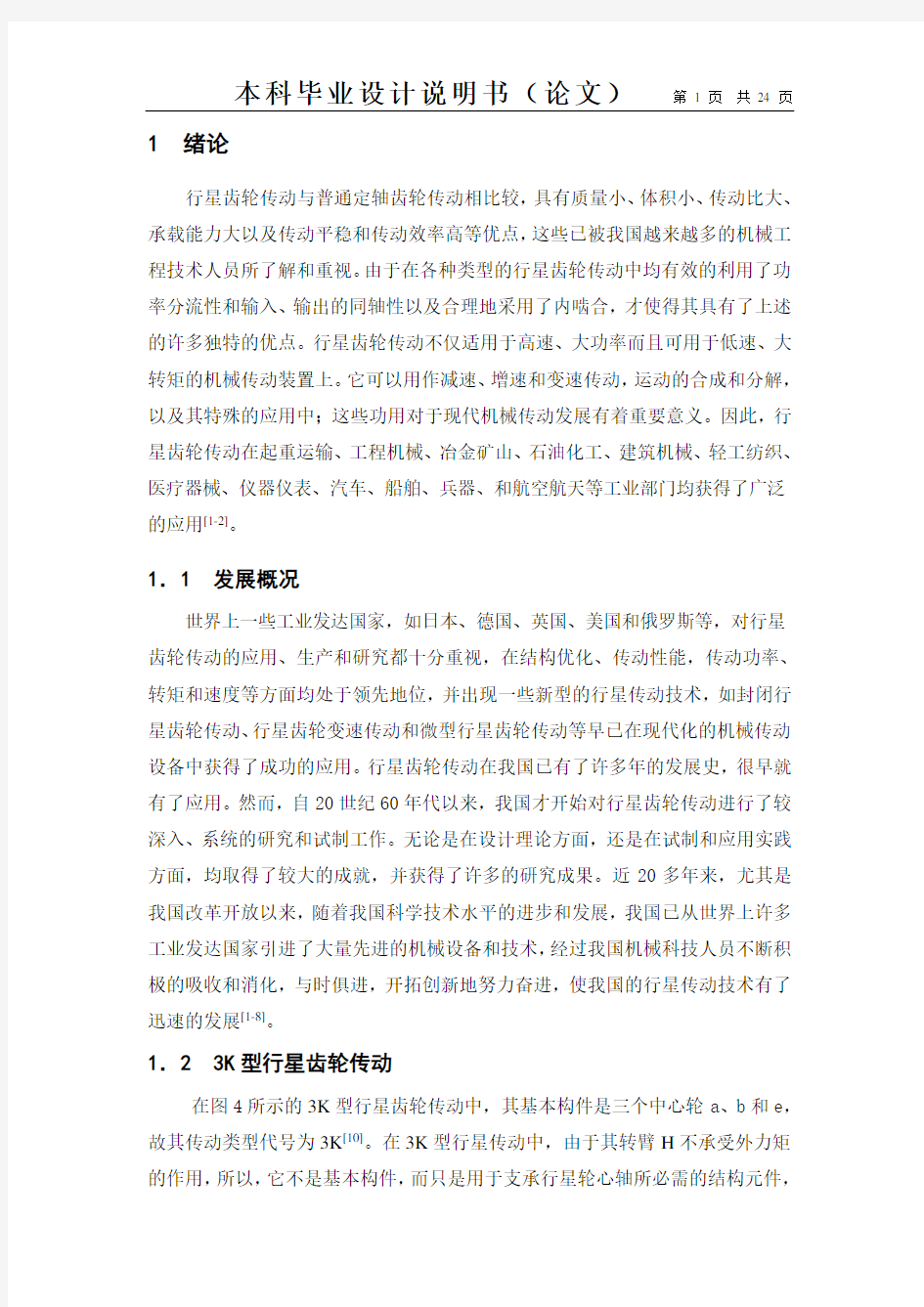
(a) 3K(Ⅰ)型 (b) 3K(Ⅱ)型 (c) 3K(Ⅲ)型
图1-1.3K型行星齿轮传动
(1)3K(Ⅰ)型具有双齿圈行星轮的3K型行星齿轮传动,如图1-1(a)所示。它的结构特点是:内齿轮b固定,而旋转的中心轮a和e分别与行星轮c 和d相啮合,故可用传动代号3K(Ⅰ)表示。在各种机械传动中,它已获得了较广泛的应用。
(2)3K(Ⅱ)型具有单齿圈行星轮c的3K型行星齿轮传动,如图1(b)所示。该3K型行星传动的结构特点是:三个中心轮a、b和e同时与单齿圈行星轮c相啮合;即内齿轮b固定,两个旋转的中心轮a和e同时与行星轮c相啮合,故可用传动代号3K(Ⅱ)表示。一项较新型的行星齿轮传动,目前该项传动新技术在我国的齿轮传动中已获得了日益广泛的应用。
(3)3K(Ⅲ)型具有双齿圈行星轮的3K型行星齿轮传动,如图1(c)所示。它的结构特点是:内齿轮c固定,两个旋转的中心轮a和b与同一个行星轮c相啮合,而另一个行星轮d与固定内齿轮e相啮合;故可用传动代号3K(Ⅲ)表示。在实际运用中,一般很少采用3K(Ⅲ)型行星齿轮传动[10]。
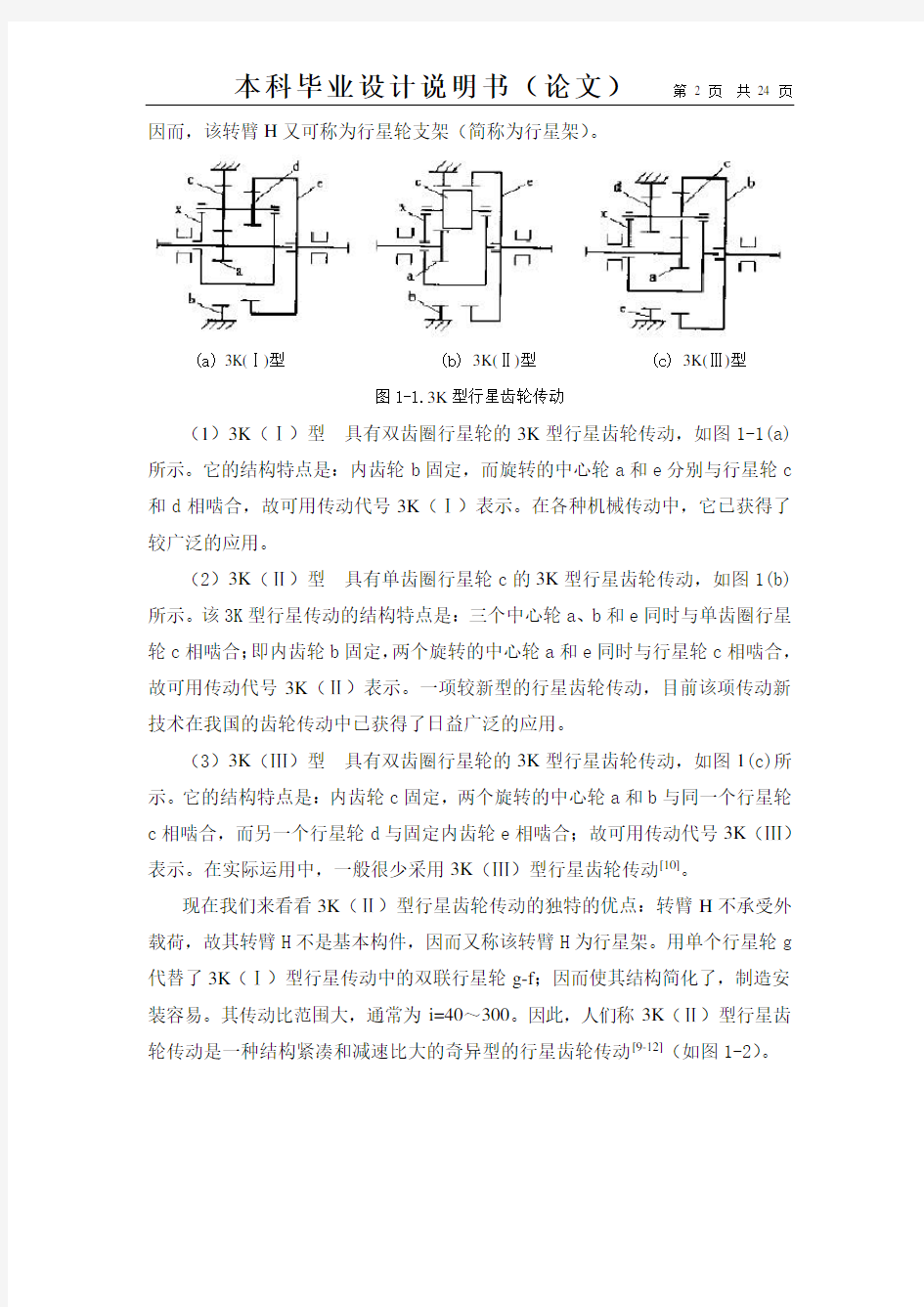
现在我们来看看3K(Ⅱ)型行星齿轮传动的独特的优点:转臂H不承受外载荷,故其转臂H不是基本构件,因而又称该转臂H为行星架。用单个行星轮g 代替了3K(Ⅰ)型行星传动中的双联行星轮g-f;因而使其结构简化了,制造安装容易。其传动比范围大,通常为i=40~300。因此,人们称3K(Ⅱ)型行星齿轮传动是一种结构紧凑和减速比大的奇异型的行星齿轮传动[9-12](如图1-2)。
图1-2.3K (Ⅱ)型行星齿轮传动
2 行星齿轮传动的设计计算
2.1 选取行星齿轮传动的传动类型和传动简图
根据毕业设计任务书设计要求,为了装配方便,结构更加紧凑,选用具有单齿圈行星轮的3K (Ⅱ)型行星齿轮传动,传动简图如图1-1(b )。
2.2 配齿计算
据3K (Ⅱ)型行星传动的传动比i p 值和按其配齿计算公式可求得内齿轮b 、c 和行星轮e 的齿数z b 、z c 和z e 。现考虑到该行星齿轮传动的外廊尺寸较小,故选择中心轮a 的齿数15z a =和行星轮数目3n p =。为了使内齿轮b 与e 的齿数尽可能小,即应取3n z z p b e ==-。再将z a 、n p 和i p 值代入公式,则得内齿轮b 的齿数z b 为
30 )]315()133(3154)315([21
)]
n (z -)1(4)n (z [21
z 2p a 2p a b =+--??++=+-++=p p a i n z 式(2-1)
由此可得内齿轮e 的齿数z e 为
33330n z z p b e =+=+= 式(2-2) 因181533z z a e =-=-为偶数,按公式可求得行星轮c 的齿数z c 为
81)1533(2
1
1)(21z c =--=--=
a e z z 式(2-3) 验算其实际的传动比b
ae i 为
33)29
3333
)(15301())(1(=-+=-+
=b e e a b b ae z z z z z i 式(2-4)
其传动比误差i ?为 033
3333=-=
-=
?p
b ae
p i i i i 式(2-5)
故满足传动比误差的要求,即得该行星齿轮传动实际的传动比为33=b
ae i 。最后
确定该行星传动各轮的齿数为8z 33z 30z 15c e b ====和、、a z 。
2.3 初步计算齿轮的主要参数
齿轮材料和热处理的选择:中心轮a 和行星轮c 均采用20CrMnTi ,渗碳淬火,齿面硬度58~62HRC ,查图可取2H lim N/mm 1400=σ和2Flim N/mm 340=σ[16],中心轮a 和行星轮c 的加工精度6级;内齿轮b 和c 均采用42CrMo ,调质硬度217~259HB ,查图可取2H lim N/mm 780=σ和2Flim N/mm 260=σ[16],内齿轮b 和e 的加工精度7级。
按弯曲强度的初算公式计算齿轮的模数m 为 3
Flim
2
1d Fa1
FP F A 1m z Y K K K T K m σφ∑= 式 (2-6) 现已知2Flim 1N/mm 34015z ==σ,。 小齿轮名义转矩
m N 329.01450315
.09549n n P 9549T 1p 11?=??== 式(2-7)
取算式系数12.1 K m =;查表取使用系数 1.5 K A =;取综合系数 1.8K F =∑;取接触强度计算的行星轮间载荷分布不均匀系数 1.2K H p =,由公式可得
+=-+=1)1K (5.11K H p Fp 3.1)12.1(5.1=-;由图查得齿形系数67.2Y 1Fa =;由表查得齿宽系数6.0d =φ[16];则得齿轮模数m 为
)(49.0340
156.067
.23.18.15.1329.01.12m 3
2
mm =??????= 式 (2-8) 取齿轮模数m =0.6mm 。
2.4 啮合参数计算
在三个啮合齿轮副a-c 、b-c 和e-c 中,其标准中心距a 为
)
(5.7)833(6.021
)(21)(6.6)830(6.021
)(21)(9.6)815(6.021
)(21mm z z m a mm z z m a mm z z m a c e ec c b bc c a ac =-?=-==-?=-==+?=+=
式
(2-9) 由此可见,三个齿轮副的标准中心距均不相等,且有bc ac ec a >a >a 。因此,该行星齿轮传动不能满足非变位的同心条件。为了使该行星传动既能满足给定的传动比33=p i 的要求,又能满足啮合传动的同心条件,即应使各齿轮副的啮合中心距'a 相等,则必须对该3K(Ⅱ)型行星齿轮传动进行角度变位。
根据各标准中心距之间的关系bc ac ec a >a >a ,现选取其啮合中心距
mm 2.7a a'ec ==作为各齿轮副的公用中心距值。
已知22z z 23z z c b c a =-=+,和25z z c e =-,mm 5.7'a mm 6.0m ==,及压力角?=20α,按公式计算3K(Ⅱ)型行星齿轮传动角度变位的啮合参数。对各齿轮副的啮合参数计算结果见表2-1。
表2-1. 3K(Ⅱ)型行星传动啮合参数计算
项目 计算公式
a-c 齿轮副
b-c 齿轮副
e-c 齿轮副
中心距变动系数y
m
a
a y -=
' 1=a y 5.1=b y 0=c y
啮合角'α )cos a'
a arccos('αα=
?=2.30'ac α ?=22.34'bc α
?
==20'ec αα
变位系数和∑χ )'(tan 2z αααχinv inv -=∑
∑
2589.1ac =∑χ 0537.2bc =
∑χ
)
(0
21ec χχχ==∑
齿顶高动系数?y
y -y ∑=?χ
2589
.0y a =? 5537
.0y b =?
0y =?e
重合度ε
=ε)]
'tan (tan z )'tan (tan [212211ααααπ
-±-a a z 7855.0=a ε
7638
.0=
a ε
0733
.1=
a ε
确定各齿轮的变位系数x 。
(1)a-c 齿轮副 在a-c 齿轮副中,由于中心轮a 的齿数17z 15 z min a =<=,
342z 23z z min c a =<=+和中心距mm 5.7a'mm 9.6a ac =<=。由此可知,该齿轮副的变位目的是避免小齿轮a 产生根切、凑合中心距和改善啮合性能。其变位方式也应采用角度变位的正传动,即0x x x c a ac >+=∑
当齿顶高系数1h a =*,压力角?=20α时,避免根切的最小变位系数min χ为 1176.017
15
1717z 17a min =-=-=
χ 式 (2-10) 按公式可求得中心轮a 的变位系数a χ为
χχχχ?+??
?????-+--=∑∑)(5.0a ac a c a
c ac a y z z z z
08.0)2589.02589.1(1581582589.15.0+??
?
???-+--=
1176.08616.0min =>=χ 式 (2-11)
查公式可得行星轮c 的变位系数c χ为
3973.08616.02589.1=-=-=∑a ac c χχχ 式 (2-12) (2)b-c 齿轮副 在b-c 齿轮副中,178min =<=z z c ,34222min =<=-z z z c b 和mm a mm a bc 5.7'6.6=<=。据此可知,该齿轮副的变位目的是为了避免齿轮c 产生根切、凑合中心距和改善啮合性能。故其变位方式也应采用角度变位的正传动,即0>-=∑c b bc χχχ
现已知其变位系数和0537.2=∑bc χ和3973.0=c χ,则可得内齿轮b 的变位系数为451.23973.00537.2=+=+=∑c bc b χχχ。
(3)e-c 齿轮副 在e-c 齿轮副中,min z e >χ,34225min =<=-z z z c e 和
mm a a ec 5.7'==。由此可知,该齿轮副的变位目的是为了改善啮合性能和修复啮合齿轮副。故其变位方式应采用高度变位,即0=-=∑c e ec χχχ。则可得内齿轮e 的变位系数为3973.0==c e χχ。
2.5 几何尺寸计算
对于该3K(Ⅱ)型行星齿轮传动可按书中的计算公式进行其几何尺寸的计算。各齿轮副的几何尺寸的计算结果见表2-2。
表2-2. 3K(Ⅱ)型行星传动几何尺寸计算
项 目 计 算 公 式
a-c 齿轮副
b-c 齿轮副 e-c 齿轮副
变位系数χ 1
21
χχχχ ∑=
3973
.08616
.021==χχ
451
.23973
.021==χχ
3973
.03973
.021==χχ
分度圆
直径d 221
1mz d mz d ==
8
.4d 9d 21==
18
d 8.4d 21==
8
.19d 8.4d 21==
基圆直径d b
α
αcos d d cos d d 22b 11b ==
5105
.4d 4572
.8d 2b 1b ==
9145
.16d 5105.4d 2b 1b ==
6059
.18d 5105
.4d 2b 1b ==
节圆直径'd 1
22
21
21
1
'
a 2d '
a 2d z z z z z z ±=±=‘‘
0087
.5d 3913
.9d '2
'1==
8857
.19d 4857
.5d '2
'
1==
8
.19d 8
.4d '2
'
1==
齿顶圆直径d a
外啮合 y
h m d d y h m d d a a a a ?-++=?-++=*
*
222111(2)
(2χχ 16608
.692324.1021==a a d d
内啮合 )0()(2)
(212222111>-=?+--=++=∑*
*χχχχχy h m d d h m d d a a a a
e d a ?-=47676.61
00155.6=
07676.192=a d
)
)(2.15,()
(2'2)
(2)(22
2
2112222111z h m e m C a d d h m d d e
h m d d a f a a a a a χχχχχ-=?=++=--=?-++=*
**
*
插齿
10039.0=?e
e d a ?-=47676.61
00155.6=
07676.192=a d
齿根圆直径d f 外啮合 )
(2)
(2222111χχ-+-=-+-=*
*
**
C h m d d C h m d d a
f a f
77676
.353392
.821==f f d d
内啮合
)
(2)
(2002111插齿a f a f d a d C h m d d +=-+-=**χ
079
.2177676.321==f f d d
685
.2177676.321==f f d d
式中*a h -齿顶高系数,取1=*
a h ;
*C -顶隙系数,取25.0=*C 。
△e-齿顶间隙,可按下式计算:2
2
2)(2.15z h m e a χ-=?*
关于用插齿刀加工内齿轮,其齿根圆直径a d 的计算。
已知模数mm .60m =,插齿刀齿数250=z ,齿顶圆系数25.10
=*
a h ,变位系数00=χ。试求被插齿内齿轮的齿根圆直径2f d 。
齿根圆直径2f d 按下式计算,即 '02022a d d a f +=
式中 0a d —插齿刀的齿顶圆直径;
'
02a —插齿刀与被加工内齿轮的中心距。
)(5.16)025.1(6.02256.0)(20000mm
h m mz d a a =+?+?=++=*χ 式(2-13) 现对内齿轮齿轮副b-c 和e-c 分别计算如下。 (1) b-c 内齿轮齿轮副(451.22=χ,30=b z )。
αχχαinv z z inv b +-?
-=
02'
0220tan )(2
37174.02025
3020tan )0451.2(2=?+-?
-=
inv 式(2-14)
查表可知?=52'
02α[16]。
3158.1)152cos 20cos (22530)1cos cos (2'
02
002=-??
-=--=
ααz z y b 式(2-15) 加工中心距'
02a 为
)(28948.2)3158.12
25
30(6.0)2(
020'
02mm y z z m a b =+-=+-= 式(2-16) 按公式计算内齿轮b 齿根圆直径为
)(079.2128948.225.162'
0202mm a d d a f =?+=+= 式(2-17)
(2) e-c 内啮合齿轮副(3973.02=χ,33=c z )。
仿上,αα
χχαinv z z inv +--=
202'
02tan )(2
0511.02025
3320tan )03973.0(2=?+-?
-=
inv 式(2-18)
查表得'3329'
02?=α[16]。
3208.0)1'3329cos 20cos (22533)1cos cos (2'
02
002=-??
-=--=
ααz z y e 式(2-19) )(59248.2)3208.02
25
33(6.0)2(
020'
02mm y z z m a b =+-=+-= 式(2-20) 则得内齿轮e 的齿根圆直径为
)(685.2159248.225.162'
0202mm a d d a f =?+=+= 式
(2-21) 2.6 装配条件的验算
对于所设计的上述行星齿轮传动应满足如下的装配条件。
(1)邻接条件 按公式p
ac ac n a d π
sin
2'
<验算其邻接条件
将已知的'ac ac a d 、和p n 值代入上式,则得
)(9904.123
180
sin 7.52)6.16608(mm mm =??< 式 (2-22) 即满足邻接条件。
(2)同心条件 按公式
'
'cos cos cos ec
c
e bc c b ac c a z z z z z z ααα-=-=+‘ 式(2-23) 验算该3K(Ⅱ)型行星传动的同心条件,根据所求的代人上式,得
61.2620cos 25
22.34cos 222.30cos 23=?
=?=?
则满足同心条件。
(3)安装条件 验算其安装条件,)(21333
30)(153
30
15整数整数=+=+=+=+p c b b a n z z np z z 式(2-24)
所以,满足其安装条件。
2.7 传动效率的计算
由表2-2的几何尺寸计算结果可知,内齿轮b 的节圆直径mm d b 8857.19'
=大干内齿轮e 的节圆直径mm 8.91d e =‘,即‘
’e b d d >,
故该3K(Ⅱ)行星传动的传动效率b ae η可采用公式x
be
b ae
p
i φη11198.0b ae -++
=
式(2-25)
进行计算,已知33=b
ae i 和2==
a
b
z z p 其啮台损失系数x
m e x m b x be φφφ+= 式(2-26)
x mb
φ和x
me φ可按公式)11(
2
)1
1(2
e
c m x
me b c m x
mb z z f z z f -=
-=
πε
φπε
φ 式(2-27)
计算。
取轮齿的啮合摩擦因数0.1 =m f ,重合度8.0=ε,且将z c 、z b 和z e 代入式(2-27),可得
0119.0)33
181(1.0201152.0)30
1
81(1.02=-?==-?=πεφπε
φx me
x
mb 式(2-28)
即有 02342
.0=+=x
m e x m b x be φφφ 所以,其传动效率为
%78794.002342.012
133
198.011198.0b
ae >=?-++
=-++
=
x
be
b ae
p
i φη 式(2-29)
可见,该行星齿轮传动的传动效率满足任务书要求。
2.8 齿轮强度验算
由于3K(Ⅱ)型行星齿轮传动具有短期问断的工作特点,且具有结构紧凑、外廓尺寸较小和传动比大的特点。针对其工作特点,只需按其齿根弯曲应力的强
度条件公式P F F σσ≤进行校核计算
首先按公式P F F F V A F K K K K K αβσσFo = 式(2-30) 计算齿轮的齿根应力,齿根应力的基本值Fo σ可按公式
βεσY Y Y Y bm
F Sa Fa t
=
Fo 式(2-31) 计算,许用齿根应力Fp σ可按公式
X RrelT relT F NT
ST F F Y Y Y S Y Y P
δσσmin
lim =
式(2-32)
计算。
现将该3K(Ⅱ)行星传动按照三个齿轮副a-c 、b-c 和e-c 分别验算如下。(1)a-c 齿轮副 ① 名义切向力F t 。
中心轮a 的切向力tca t F F =可按公式
)(2000
'
N T d n F a a
p ca =
式(2-33) 计算;已知m 0.987N T a ?=,3 n p =和mm d a 391.9'
=。则得
N)(1.70391.93987
.020002000'
=??==
a
p a t d n T F 式(2-34)② 有关系数
a. 使用系数A K 。
使用系数A K 按轻微冲击查表得35.1K A =[16]。 b. 动载荷系数V K 。
19100
)
('x a a x
n n d v -= 式(2-35)
其中 )/(33.4832
11450
1s m p n n a x =+=+=
式
(2-36)
所以 )/(475.019100
)
33.4831450(391.9s m v x =-=
式(2-37)
已知中心轮a 和行星轮c 的精度为6级,即精度系数6=C ;再按公式计算动载荷系数V K ,即
B
x
v A A
-??
????+=200K V 式(2-38)
式中 25.0)56(25.0)5(25.0667.0667.0=-=-=C B 式(2-39)
92)25.01(5650)1(5650=-+=-+=B A 式(2-40)
则得
06.132009292
K 25
.0V =?
?
?????+=- 式(2-41)
c. 齿轮载荷分布系数βF K 。
F b μθβ)1(1K F -+= 式(2-42) 42.09
5
.75.0'5.0=?==
a d d a φ 式(2-43)
由3.1=d φ代入式(2-43),则得
3.11)13.1(1=?-+=βF K 式(2-44)
d. 齿间载荷分配系数αF K 。查表得 1.1=αF K [16]
e. 行星轮间载荷分配系数FP K 。
)1(5.11-+=HP FP K K 式(2-45) 已取2.1=HP K ,则得
3.1)12.1(5.11=-+=FP K 式(2-46)
f. 行星轮间载荷分配系数Fa Y 。
查表得 58.21=Fa Y 33.22=Fa Y [16]
g. 应力修正系数Sa Y 。
查表得 63.11=Sa Y 73.12=Sa Y [16]
h. 重合度系数t Y 。 1875.18
.075
.025.075
.025.0=+
=+
=ac
t Y ε 式(2-47)
i. 螺旋角系数βY 。 查图得1=βY [16]
因行星轮c 不仅与中心轮a 啮合,且同时与内齿轮b 和e 相啮合,故取齿宽
mm b 6=
③ 计算齿根弯曲应力F σ。
FP F F V A t Sa Fa t
F K K K K K Y Y Y Y bm
F αββσ1111= 式(2-48) 2/43.2873.11.13.106.15.111875.163.158.26
.061
.70mm N =??????????=
FP F F V A t Sa Fa t
F K K K K K Y Y Y Y bm
F αββσ2222=
式(2-49) 2/5.2753.11.13.106.15.111875.173.133.26
.061
.70mm N =??????????=
取弯曲应力2/300mm N F =σ。
④ 计算许用齿根应力:
X RrelT BrelT NT ST F F F Y Y Y Y Y S P
min
lim
σσ=
式(2-50)
已知齿根弯曲疲劳极限2Flim N/mm 340=σ。 查表得最小安全系数6.1min =F S [16]。
式中各系数T Y S 、NT Y 、BrelT Y 、RrelT Y 和X Y 取值如下。 应力系数T Y S ,按所给定的Flim σ区域图取Flim σ时,取2S =T Y [16]。 寿命系数:
02
.06)103(L
NT
N Y ?= 式(2-51)
式中应力循环次数L N 按下面公式计算,且可按每年工作300天,每天工作16h ,即
51074.13)33.4831450(60)(60?=?-=-=t n n n N p x a L 式(2-52) 则得 06.1)1074.1103(02
.05
6=??=NT
Y 式(2-53) 齿根圆角敏感系数:
1=BrelT Y
相对齿根表面状况系数:
1.0)1(529.0674.1+-=Z RrelT R Y 式(2-54) 取齿根表面微观不平度m R Z μ5.12=,代入上式得:
98.0)15.12(529.0674.11.0=+-=RrelT Y 式(2-55)
尺寸系数
04.1101.005.101.005.1=?-=-=n X m Y 式(2-56) 可得许用齿根应力为: )/(15.45904.198.0106.126
.1340
2mm N P F =?????=
σ 式(2-57) 因齿根应力)/300(2mm N F =σ小于许用齿根应力)/(15.4592mm N P F =σ,即
P
F F σσ<。所以,a-c 齿轮副满足齿根弯曲强度条件。
(2) b-c 齿轮副 在内啮合齿轮副b-c 中只需要校核内齿轮b 的齿根弯曲强度,即仍按公式(2-49)计算其齿根弯曲应力2F σ及式(2-50)计算许用齿根应力Fp σ。已知302==b z z ,2Flim N/mm 260=σ。
仿上,通过查表或采用相应的公式计算,可得到取值与外啮合不同的系数为
11.1=V K ,26.1=βF K ,1.12=αF K ,1=P F K 053.22=Fa Y ,65.22=Sa Y ,212.12=t Y ,92.0=NT Y , 03.1=BrelT Y 和01.1=X Y [16]。代入公式(2-49)则得
FP F F V A t Sa Fa t
F K K K K K Y Y Y Y bm
F αββσ122=
式(2-58)
2/3.29611.126.111.15.11212.165.2053.26
.061
.70mm N =??????????=
取 )/300(2mm N F =σ
)/(30501.198.003.192.026
.1260
2min
lim mm N Y Y Y S Y Y X RrelT relT F NT
ST F F P
=?????=
=
δσσ 可见,2F Fp σσ>,故b-c 齿轮副满足齿根弯曲强度条件。
(3) e-c 齿轮副 仿上,e-c 齿轮副只需要校核内齿轮e 的齿根弯曲强度,即仍按公式计算2F σ和Fp σ。仿上,与内齿轮b 不同的系数为02.1=P F K 和03.1=t Y 。代入上式,则得
FP F F V A t Sa Fa t
F K K K K K Y Y Y Y bm F αββσ222=
式(2-59) 2/84.25602.11.126.111.15.1103.165.2053.26
.061
.70mm N =??????????=
因 )/5.275(21mm N F =σ 取 )/280(2mm N F =σ
X RrelT relT F NT
ST F F Y Y Y S Y Y P
δσσmin
lim =
式(2-60)
)/(30501.198.003.192.026
.1260
2mm N =?????=
可见,F Fp σσ>,故e-c 齿轮副满足弯曲强度条件。
3 结构设计
根据3K(Ⅱ)型行星传动的工作特点、传递功率的大小和转速的高低等情况,对其进行具体的结构设计。首先应确定中心轮(太阳轮)a 的结构,因为它的直径d 较小,所以,轮a 应该采用齿轮轴的结构型式;即将中心轮a 与输入轴连成一个整体。且按该行星传动的输入功率P 和转速n 初步估算输入轴的直径d A ,同时进行轴的结构设计。为了便于轴上零件的装拆,通常将轴制成阶梯形。总之,在满足使用要求的情况下,轴的形状和尺寸应力求简单,以便于加工制造。
内齿轮b 采用了十字滑块联轴器的均载机构进行浮动;即采用齿轮固定环将内齿轮b 与箱体的端盖连接起来,从而可以将其固定。内齿轮e 采用了将其与输出轴连成一体的结构,且采用平面辐板与其轮毂相联接。
行星轮c 采用带有内孔的结构,它的齿宽b 应当加大;以便保证该行星轮c 与中心轮a 的啮合良好,同时还应保证其与内齿轮b 和c 相啮台。在每个行星轮的内孔中,可安装两个滚动轴承来支承着。而行星轮轴在安装到转臂H 的侧板上之后,还采用了矩形截面的弹性挡圈来进行轴向固定。
由于该3K 型行星传动的转臂H 不承受外力矩,也不是行星传动的输人或输出构件;而且还具有3 n p =个行星轮。因此,其转臂H 采用了双侧板整体式的结构型式。该转臂H 可以采用两个向心球轴承支承在中心轮a 的轴上。
转臂H 上各行星轮轴孔与转臂轴线的中心距极限偏a f 可按公式
)(1000
'
83mm a f a ±≤ 式(3-1)
计算。现已知啮合中心距mm 5.7a'=,则得
)(01566.01000
5
.781000'833mm a f a =±=±≤ 式
(3-2) 取m 7.15f a μ=
各行星轮轴孔的孔距相对偏差1δ可按公式
)(1000
'
)
5.4~3(1mm a ±≤δ 式(3-3)
计算,即
)(0123.0~0082.01000
5.7)5.4~3(1000')
5.4~3(1mm a ==±≤δ 式(3-4) 取m 10mm 01.01μδ==
转臂H 的偏心误差χe 约为孔距相对偏差1δ的1/2,即m e μδχ52
1
=≈
在对所设计的行星齿轮传动进行了其啮合参数和几何尺寸计算,验算其装配条件,且进行了结构设计之后,现在可以绘制该行星齿轮传动结构图。
3.1 初估轴径
选取轴的材料为45钢,调质处理,查表取1120=A [16],得 mm n P A d 26.51450
15
.011233
110min =?== 式(3-3)
输出轴的最小直径是用与安装联轴器。为使所选直径与联轴器的孔径相适应,故需同时选取联轴器型号。
联轴器的计算转矩3T K T A ca =,考虑扭矩变化很小,取3.1=A K ,则 m N T K T A ca ?=?==4277.0329.03.1 式 (3-4) 查手册,选用TL1弹性套柱销联轴器,取轴径mm d 10=。
kw P P 1185
.0%7915.012=?=?=η 式(3-5) min /94.4333
1450
333300r n n n n n n n n i a e e a b e b a b
ae ===?=--=--=
式(3-6)
可知mm n P A d e 59.1594
.431185
.011233
20min 2=?== 式(3-7)
因而输出轴可选用YL3凸缘联轴器,取轴径mm d 16=。
3.2 轴的结构设计
如果安装齿轮处的轴径d 满足
m d d f 5.22
4
≤-(f d —齿根圆直径),则齿轮
与轴做成一体,而且一般4d d f >,以便齿轮加工时退刀。但当齿轮顶圆直径较小时,其齿根圆直径允许小于相邻的轴径[17]。
图3-1.轴1结构图
图3-2.轴2结构图
3.3 拟定轴上零件的装配方案并选择支承的结构型式
轴上零件的装配方案及轴支承结构型式的不同,轴的结构形状、尺寸也将不同,可通过分析比较选择一个好的方案。圆柱齿轮、套筒、左端轴承、轴承端盖和联轴器依次由轴的左端装入,仅有右端轴承从轴的右端装入。轴的支承结构型式采用的是两端(单向)固定型式。
3.4 轴承的选择
据情况可选择深沟球轴承6003,mm d 17=,mm D 35=,mm B 10=,深沟球轴承6203,mm d 17=,mm D 40=,mm B 12=,深沟球轴承6010,mm d 50=,
mm D 80=,mm B 16=
3.5 行星架的选择
双壁整体式行星架的刚性好,如轴与行星架一体,轴与行星架为法兰式连接,带齿的浮动行星架,焊接式行星架等应采用双壁整体式行星架。
双壁分开式行星架结构复杂,主要用于传动比较小的情况(如4≤b
aH i )的
NGW型传动。
单臂式行星架结构较简单,可容纳较多的行星轮,但行星轮心轴为悬臂状态,受力情况不好。
综上所述,选双壁整体式行星架。
NGW型行星齿轮减速器——行星轮的设计
目录 一.绪论 (3) 1.引言 (3) 2.本文的主要内容 (3) 二.拟定传动方案及相关参数 (4) 1.机构简图的确定 (4) 2.齿形与精度 (4) 3.齿轮材料及其性能 (5) 三.设计计算 (5) 1.配齿数 (5) 2.初步计算齿轮主要参数 (6) (1)按齿面接触强度计算太阳轮分度圆直径 (6) (2)按弯曲强度初算模数 (7) 3.几何尺寸计算 (8) 4.重合度计算 (9) 5.啮合效率计算 (10) 四.行星轮的的强度计算及强度校核 (11) 1.强度计算 (11) 2.疲劳强度校核 (15) 1.外啮合 (15) 2.内啮合 (19) 3.安全系数校核 (20)
五.零件图及装配图 (24) 六.参考文献 (25)
一.绪论 1.引言 渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。 渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。 NGW型行星齿轮传动机构的主要特点有: 重量轻、体积小。在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3; 传动效率高; 传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高; 装配型式多样,适用性广,运转平稳,噪音小; 外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。 因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。 2.本文的主要内容 NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,
齿轮传动设计
机械原理 课程设计说明书 设计题目:齿轮传动设计 学院:工程机械学院 专业:机械设计制造及其自动化班级:25040808
设计者:刘春(学号:25) 指导教师:张老师 2011-01-13 课程设计说明书 一、设计题目:齿轮传动设计 如图所示,齿轮变速 箱中,两轴中心距为80㎜, 各轮齿数为Z1=35,Z2=45, Z3=24,Z4=55, Z5=19,Z6=59,模数均为 m=2㎜,试确定各对齿轮的传动传动类型,并设计这三对齿轮传动。 二、全部原始数据:
Z1=35,Z2=45,Z3=24,Z4=55,Z5=19,Z6=59, m=2mm,ha*=1,c*=0.25, α=20,a'=80mm 三、设计方法及原理: (一)传动的类型及选择: *按照一对齿轮的变位因数之和(X1+X2)的不同,齿轮传动可分为三种类型。 1.零传动(X1+X2=0) a.标准齿轮传动:X1=X2=0 传动特点:设计简单,便于互换。 b.高度变为齿轮传动:X1=-X2≠0,X1+X2=0。一般小齿轮 采用正变位,大齿轮采用负变位。 传动特点:互换性差,需成对设计和使用,重合度略有降低。 2.正传动(X1+X2>0) 传动特点: ①可以减小齿轮机构的尺寸。 ②可以减轻齿轮的磨损程度。 ③可以配凑中心距。 ④可以提高两轮的承载能力,由于两轮都可以采用正变。
位,可以增加两齿轮的齿根厚度,从而提高两齿轮的抗弯能力。 ⑤互换性差,需成对设计,制造和使用。 ⑥重合度略有降低。 3.负传动(X1+X2<0) 传动特点: ①重合度略有降低。 ②互换性差,需成对设计,制造和使用。 ③齿厚变薄,强度降低,磨损增大。 综上所述,正传动的优点突出,所以在一般情况下,采用正传动;负传动是最不理想的传动,除配凑中心距的不得已情况下,尽量不用;在传动中心距等于标准中心距时,为了提高传动质量,可采用高度变位齿轮传动代替标准齿轮传动。 (二)变位因数的选择: *根据设计要求,可在封闭图上选择变位因数。 封闭图内容解释: 1.封闭图中阴影区是不可行区,无阴影区是可行区。所选择的变位因数的坐标点必须在可行区内。 2.根据不发生根切的最小变位因数算出两个齿轮不发生根切的限制线X1min,X2min分别平行于两坐标轴,若变位因数X1在X1min线的右边,变位因数X2在X2min线的上方,则所设计的齿轮完全不发生根切。
齿轮传动强度计算例题01
同济大学《机械设计》 JXSJ 51 直齿圆柱齿轮传动例题: 如图设计带式输送机减速器的高速级齿轮传动。已知输入功率P 1=40KW ,小齿轮转速n 1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(每年 工作300天),两班制,带式运输机工作平稳,转向不变。 解: 1. 选择齿轮类型、材料、精度等级和齿数 1) 选用直齿轮。 2) 材料:考虑到功率较大,大小齿轮均用硬齿面. 3) 材料为40Cr ;调质后表面淬火,齿面硬度为48~55HRC. 4) 选取精度等级:初取7级精度 5) 齿数:Z1=24;Z2=uZ1=77 2. 按齿面接触疲劳强度设计 1)设计公式: 2)确定各参数值 (1) 初取K t =1.3 (2) 转矩 T 1=95.5×105P/n 1=95.5×105×40/960=3.98×105N·m (3) 选取齿宽系数. ψd =0.9 (4) 弹性影响系数. ZE=189.8Mpa1/2 (5) 许用应力 a) 接触疲劳强度极限 σHlim = σHlim1= σHlim2=1170Mpa b)应力循环次数: N 1=60n 1γL h =60?960?1?(2?8?300?15)=4.147?109 N 2=N 1/u=4.147?109/3.2=1.296?109 c)寿命系数:K N1=0.88 K N2=0.90 d)许用安全系数 [s]=1 e)许用应力: [σHlim1]= K N1σHlim1/s=0.88?1170/1=1030Mpa [σHlim2]= K N2σHlim1/s=0.9?1170/1=1053Mpa [σHlim ]= [σHlim1]=1030Mpa (6) 初算直径 3)修正计算 (1) 速度: v=πd 1n 1/60?1000=3.14?68.39?960/60?1000=3.44(m/s) (2) 齿宽 b=ψd d 1t =0.9?68.39=61.55mm (3) 计算齿宽与齿高之比 模数:m t =d 1t/Z 1=68.39/24=2.85 齿高:h=2.25m t =2.25?2.85=6.413 b/h=61.55/6.413=9.6 (4) 计算载荷系数 a)动载系数 K v =1.12 b)使用系数 K A =1 b) 齿间载荷分配系数 设K A F t /b ≥100N/mm 则:K H α=K F α=1.1 c) 齿向载荷分布系数:K H β=1.43,K F β=1.37 载荷系数: K H =K A K V K H β K F β=1?1.12?1.1?1.43=1.72 K F = K A K V K H β K F β=1?1.12?1.1?1.37=1.69 (5) 修正分度圆: (6) 计算模数m m=d 1/Z 1=75.08/24=3.128mm 2.按齿面弯曲疲劳强度设计 1) 计算公式 2) 确定公式内的各参数值 (1) K F =1.69;T 1=3.98?105;ψd =0.9;Z 1=24 (2) 许用应力 a) 极限应力: σF1=σF2=680Mpa b) 寿命系数: K FN1=0.88;K FN2=0.90 c) 安全系数:S=1.4 d) 许用应力: [σF1]=K FN1σF1/S=0.88?680/1.4=427.4Mpa [σF2]=K FN2σF2/S=0.90?680/1.4=437.14Mpa (3) 齿形系数:Y Fa1=2.65;Y Fa2=2.226 (4) 应力校正系数:Y Sa1=1.58;Y Sa2=1.764 (5) 计算Y Fa Y Sa/[σF ] Y Fa1Y Sa1/[σF1]=2.65?1.58/427.4=0.0098 Y Fa2Y Sa2/[σF2]=2.226?1.764/437.14=0.00898 Y Fa Y Sa /[σF ]=0.0098 3) 计算 3. 几何计算 1) 分度圆直径: d 1=75mm ;d 2=mZ 2=3?80=240 2) 模数:由接触疲劳强度和弯曲疲劳强度计算,取m=3mm 3) 齿数:Z 1=d 1/m=75/3=25 Z 2=uZ 1=3.2?25=80 4) 齿轮宽度:b=ψd d 1=0.9?75=67.5mm 取B 1=73mm ;B 2=68mm 5) 验算: F t =2T 1/d 1=2?3.98?105=10613.33N K A F t /b=1?10613.33/68=156.08N/mm>100N/mm 合适 4. 结构设计(略) 1 2 3 4 5 6 7 []3 2 1112 32.2??? ? ??±≥H E d Z u u KT d σψ[])(39.6810308.1892.312.39.0103983.12 32.212 32.2325 3 2 11mm Z u u T K d H E d t t =? ?? ??±???=??? ? ??±≥σψ) (08.753.1/72.139.683311mm K K d d t t =?==[] 32 11 2sa Fa F d Y Y z KT m σψ≥mm m 94.20098.0249.01098.369.1232 5 =?????≥
(完整word版)NGW型行星轮中太阳轮的设计和计算要点
目录 一.绪论 (1) 二.拟定传动方案及相关参数 (3) 1.机构简图的确定 (3) 2.齿形与精度 (3) 3.齿轮材料及其性能 (4) 三.设计计算 (4) 1.配齿数 (4) 2.初步计算齿轮主要参数 (5) 3.几何尺寸计算 (8) 4.重合度计算 (9) 四.太阳轮的强度计算及强度校核 (10) 1.强度计算 (10) (1)外载荷 (12) (2)危险截面的弯矩和轴向力 (12) 2.疲劳强度校核 (14) (1)齿面接触疲劳强度 (14) (2)齿根弯曲疲劳强度 (18) 3.安全系数校核 (21) 五.零件图和装配图 (25) 六.参考文献 (26)
一.绪论 渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。 渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。 NGW型行星齿轮传动机构的主要特点有: 1、重量轻、体积小。在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3; 2、传动效率高; 3、传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高; 4、装配型式多样,适用性广,运转平稳,噪音小; 5、外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。 NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,以基本构件命名,
齿轮设计说明书
设计计算说明书设计题目:齿轮 学院: 专业: 班级: 学号: 姓名: 指导老师:
计算内容计算说明结果 1.计算齿轮传动 比i2根据ω=2πn,v=ωr ,求得 n=ω/2π=1.96*60=117.6r/min 由此算出i2=1500/(2.5*117.6)=5.1 传动比i2=5.1 2选择齿轮材料,并确定许用应力大丶小齿轮都采用CrMnTi,渗碳淬火,齿面硬度 HRC60.根据参考文献[1]图10-38和图10-39查出齿 轮的疲劳极限强度,确定许用应力。 σHlim 1=σHlim 2=1500MPa σFlim 1=σFlim=460MPa [σH]=0.9σHlim 1=0.9*1500=1350MPa [σF]=1.4σFlim 1=1.4*460=644MPa 材料:大丶小齿轮都采 用CrMnTi,渗碳淬火 许用应力。 σHlim1=σHlim2=1500MPa σFlim1=σFlim=460MPa [σH]=1350MPa [σF]=644MPa 3.选取设计参数取最小齿轮齿数Z1=17,则 Z2=i2Z1=5.1*17=86.7,取大齿轮齿数Z2=87 Z1=17 Z2=87 4计算齿数比U=Z2/Z1=5.1 U=5.1 5计算相对误差是 否合理由于传动比误差为|(u-i)/i|*100%=0.39%<3%~5%, 所以齿轮数选择合理 合理 6选齿宽系数Φd参考表10—11选齿宽系数Φd =0.5 (齿轮相对于轴承为对称布置) Φd =0.5
7计算系数 A m、A d 初选螺旋角β=10°, 根据表10—8,系数A m=12.4,A d=756 A m=12.4 A d=756 8计算小齿轮的功率P1和小齿轮的转 速n1取传动带的效率 η=0.95,P1=P c*0.95=28.8*0.95=27.36w n1=V/i=1500/2.5=600(r/min) P1=27.36w n1=600(r/min) 9计算小齿轮的转 矩T1T1=9550*(P1/n1) =9550*(27.36/600)=435.48(N·m) T1=435.48(N·m) 10计算当量齿数按式(10-32)计算齿轮当量齿数 Z V1=Z1/cos3β=17/cos310°=17.8 Z V2=Z2/cos3β=87/cos310°=91.1 Z V1=17.8 Z V2=91.1 11计算模数m n根据表10—10查出复合齿形系数 Y SF1=4.49,Y SF2=3.85 取载荷系数K=1.2 m n≥A m31Y KT FS1/Φd Z12[σF] =12.4*) 644 * 2 ^ 17 * 5.0 /( ) 49 .4 * 48 . 435 * 2.1( 3=3.6 按表10—1取标准值m n=4mm M n=4mm 11计算中心距a a=[m n(z1+z2)]/2cosβ =[4*(17+87)]/2*cos10°=211.2mm 取a=212mm a=212mm
直齿锥齿轮传动计算例题
例题10-3试设计一减速器中的直齿锥齿轮传动。已知输入功率P=10kw,小齿轮转速n1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(设每年工作300天),两班制,带式输送机工作平稳,转向不变。 [解]1.选定齿轮类型、精度等级、材料及齿数 (1)选用标准直齿锥齿轮齿轮传动,压力角取为20°。 (2)齿轮精度和材料与例题10-1同。 (3)选小齿轮齿数z1=24,大齿轮齿数z2=uz1=3.224=76.8,取z2=77。 2.按齿面接触疲劳强度设计 (1)由式(10-29)试算小齿轮分度圆直径,即 1) =1.3 计算小齿轮传递的转矩。 9.948 选取齿宽系数=0.3。 查得区域系数 查得材料的弹性影响系数。 [] 由图 由式( , 由图10-23查取接触疲劳寿命系数 取失效概率为1%,安全系数S=1,由式(10-14)得 取和中的较小者作为该齿轮副的接触疲劳许用应力,即
2)试算小齿轮分度圆直径 (2) 1 3.630m/s ②当量齿轮的齿宽系数 0.342.832mm 2) ①由表查得使用系数 ②根据级精度(降低了一级精度) ④由表 由此,得到实际载荷系数 3)由式(10-12),可得按实际载荷系数算得的分度圆直径为 及相应的齿轮模数 3.按齿根弯曲疲劳强度设计 (1)由式(10-27)试算模数,即
1)确定公式中的各参数值。 ①试选 ②计算 由分锥角 由图 由图 由图查得小齿轮和大齿轮的齿根弯曲疲劳极限分别为 由图取弯曲疲劳寿命系数 ,由式(10-14)得 因为大齿轮的大于小齿轮,所以取 2)试算模数。 =1.840mm
行星齿轮传动设计详解
1 绪论 行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。 1.1 发展概况 世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。 1.2 3K型行星齿轮传动 在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,
二级展开式圆柱齿轮传动减速器设计说明书Ⅱ
目录 设计任务书 (5) 一.工作条件 (5) 二.原始数据 (5) 三.设计内容 (5) 四.设计任务 (5) 五.设计进度 (6) 传动方案的拟定及说明 (6) 电动机的选择 (6) 一.电动机类型和结构的选择 (7) 二.电动机容量的选择 (7) 三.电动机转速的选择 (7) 四.电动机型号的选择 (7) 传动装置的运动和动力参数 (8) 一.总传动比 (8) 二.合理分配各级传动比 (8) 三.传动装置的运动和动力参数计算 (8) 传动件的设计计算 (9) 一.高速啮合齿轮的设计 (9) 二.低速啮合齿轮的设计 (14) 三.滚筒速度校核 (19)
轴的设计计算 (19) 一.初步确定轴的最小直径 (19) 二.轴的设计与校核 (20) 滚动轴承的计算 (30) 一.高速轴上轴承(6208)校核 (30) 二.中间轴上轴承(6207)校核 (31) 三.输出轴上轴承(6210)校核 (32) 键联接的选择及校核 (34) 一.键的选择 (34) 二.键的校核 (34) 连轴器的选择 (35) 一.高速轴与电动机之间的联轴器 (35) 二.输出轴与电动机之间的联轴器 (35) 减速器附件的选择 (36) 一.通气孔 (36) 二.油面指示器 (36) 三.起吊装置 (36) 四.油塞 (36) 五.窥视孔及窥视盖 (36) 六.轴承盖 (37) 润滑与密封 (37) 一.齿轮润滑 (37)
二.滚动轴承润滑 (37) 三.密封方法的选择 (37) 设计小结 (37) 参考资料目录 (38)
五.设计进度 1、第一阶段:传动方案的选择、传动件参数计算及校核、绘 制装配草图 2、第二阶段:制装配图; 3、第三阶段:绘制零件图。 传动方案的拟定及说明 一个好的传动方案,除了首先满足机器的功能要求外,还应当工作可靠、结构简单、尺寸紧凑、传动效率高、成本低廉以及维护方便。要完全满足这些要求是很困难的。在拟订传动方案和对多种传动方案进行比较时,应根据机器的具体情况综合考虑,选择能保证主要要求的较合理的传动方案。 根据工作条件和原始数据可选方案二,即展开式二级圆柱齿轮传动。因为此方案工作可靠、传动效率高、维护方便、环境适应行好,但也有一缺点,就是宽度较大。其中选用斜齿圆柱齿轮,因为斜齿圆柱齿轮兼有传动平稳和成本低的特点,同时选用展开式可以有效地减小横向尺寸。 示意图如下: 1—电动机;2—联轴器;3—齿轮减速器;4—联轴器;5—鼓轮;6—带式运输机 实际设计中对此方案略微做改动,即:把齿轮放在靠近电动机端和滚筒端。(其他们的优缺点见小结所述)
机械设计基础习题
《机械设计基础》习题 机械设计部分 目录 8 机械零件设计概论 9 联接 10 齿轮传动 11 蜗杆传动 12 带传动 13 链传动 14 轴 15滑动轴承 16 滚动轴承 17 联轴器、离合器及制动器 18 弹簧 19机械传动系统设计 8机械零件设计概论 思考题 8-1 机械零件设计的基本要求是什么? 8-2 什么叫失效?机械零件的主要失效形式有几种?各举一例说明。 8-3 什么是设计准则?设计准则的通式是什么? 8-4 复习材料及热处理问题。复习公差与配合问题。 8-5 什么是零件的工艺性问题?主要包含哪几方面的问题? 8-6 什么是变应力的循环特性?对称循环应力和脉动循环应力的循环特性为多少?8-7 什么是疲劳强度问题?如何确定疲劳极限和安全系数? 8-8 主要的摩擦状态有哪四种? 8-9 磨损过程分几个阶段?常见的磨损有哪几种? 8-10 常见的润滑油加入方法有哪种?
9 联 接 思 考 题 9-1 螺纹的主要参数有哪些?螺距与导程有何不同?螺纹升角与哪些参数有关? 9-2 为什么三角形螺纹多用于联接,而矩形螺纹、梯形螺纹和锯齿形螺纹多用于传动?为 什么多线螺纹主要用于传动? 9-3 螺纹副的自锁条件是什么?理由是什么? 9-4 试说明螺纹联接的主要类型和特点。 9-5 螺纹联接为什么要预紧?预紧力如何控制? 9-6 螺纹联接为什么要防松?常见的防松方法有哪些? 9-7 在紧螺栓联接强度计算中,为何要把螺栓所受的载荷增加30%? 9-8 试分析比较普通螺栓联接和铰制孔螺栓联接的特点、失效形式和设计准则。 9-9 简述受轴向工作载荷紧螺栓联接的预紧力和残余预紧力的区别,并说明螺栓工作时所 受的总拉力为什么不等于预紧力和工作载荷之和。 9-10 简述滑动螺旋传动的主要特点及其应用。 9-11 平键联接有哪些失效形式?普通平键的截面尺寸和长度如何确定? 9-12 为什么采用两个平键时,一般布置在沿周向相隔180°的位置,采用两个楔键时,相 隔90°~120°,而采用两个半圆键时,却布置在轴的同一母线上? 9-13 试比较平键和花键的相同点和不同点。 9-14 简述销联接、焊接、粘接、过盈联接、弹性环联接和成形联接的主要特点和应用场合。 习 题 9-1 试证明具有自锁性螺旋传动的效率恒小于50%。 9-2 试计算M24、M24×1.5螺纹的升角,并指出哪种螺纹的自锁性好。 9-3 图示为一升降机构,承受载荷F =150 kN ,采用梯形螺纹,d = 60 mm ,d 2 = 56 mm ,P = 8 mm ,线数n = 3。支撑面采用推力球轴承,升降台的上下移动处采用导向滚轮,它们的摩擦阻力近似为零。试计算: (1)工作台稳定上升时的效率(螺纹副当量摩擦系数为0.10)。 (2)稳定上升时加于螺杆上的力矩。 (3)若工作台以720 mm/min 的速度上升,试按稳定运转条件求螺杆所需转速和功率。 (4)欲使工作台在载荷F 作用下等速下降,是否需要制动装置?加于螺杆上的制动力矩是多少? 题9-3图 题9-4图 题9-5图 9-4 图示起重吊 钩最大起重 量F = 50 kN ,吊钩材 料为35钢。牵曳力F R F F 导向滚轮 齿轮 制动轮 推力球轴承
行星齿轮设计【模板】
第二章 原始数据及系统组成框图 (一)有关原始数据 课题: 一种行星轮系减速器的设计 原始数据及工作条件: 使用地点:减速离合器内部减速装置; 传动比:p i =5.2 输入转速:n=2600r/min 输入功率:P=150w 行星轮个数:w n =3 内齿圈齿数b z =63 第五章 行星齿轮传动设计 (一)行星齿轮传动的传动比和效率计算 行星齿轮传动比符号及角标含义为: 123i 1—固定件、2—主动件、3—从动件 1、齿轮b 固定时(图1—1),2K —H (NGW )型传动的传动比b aH i 为 b aH i =1-H ab i =1+b z /a z 可得 H ab i =1-b aH i =1-p i =1-5.2=-4.2 a z =b z /b aH i -1=63*5/21=15 输出转速: H n =a n /p i =n/p i =2600/5.2=500r/min 2、行星齿轮传动的效率计算: η=1-|a n -H n /(H ab i -1)* H n |*H ψ H ψ=*H H H a b B ψψψ+ H a ψ为a —g 啮合的损失系数,H b ψ为b —g 啮合的损失系数,H B ψ为轴承的损失系数,H ψ 为总的损失系数,一般取H ψ=0.025 按a n =2600 r/min 、H n =500r/min 、H ab i =-21/5可得
η=1-|a n -H n /(H ab i -1)* H n |*H ψ=1-|2600-500/(-4.2-1)*500|*0.025=97.98% (二) 行星齿轮传动的配齿计算 1、传动比的要求——传动比条件 即 b aH i =1+b z /a z 可得 1+b z /a z =63/5=21/5=4.2 =b aH i 所以中心轮a 和内齿轮b 的齿数满足给定传动比的要求。 2、保证中心轮、内齿轮和行星架轴线重合——同轴条件 为保证行星轮g z 与两个中心轮a z 、b z 同时正确啮合,要求外啮合齿轮a —g 的中心距等于内啮合齿轮b —g 的中心距,即 w (a )a g - =()w b g a - 称为同轴条件。 对于非变位或高度变位传动,有 m/2(a z +g z )=m/2(b z -g z ) 得 g z =b z -a z /2=63-15/2=24 3、保证多个行星轮均布装入两个中心轮的齿间——装配条件 想邻两个行星轮所夹的中心角H ?=2π/w n 中心轮a 相应转过1?角,1?角必须等于中心轮a 转过γ个(整数)齿所对的中心角, 即 1?=γ*2π/a z 式中2π/a z 为中心轮a 转过一个齿(周节)所对的中心角。 p i =n/H n =1?/H ?=1+b z /a z 将1?和H ?代入上式,有 2π*γ/a z /2π/w n =1+b z /a z 经整理后γ=a z +b z =(15+63)/2=24 满足两中心轮的齿数和应为行星轮数目的整数倍的装配条件。 4、保证相邻两行星轮的齿顶不相碰——邻接条件 在行星传动中,为保证两相邻行星轮的齿顶不致相碰,相邻两行星轮的中心距应大于两轮齿顶圆半径之和,如图1—2所示
机械设计齿轮传动设计答案解析
题10-6 图示为二级斜齿圆柱齿轮减速器, 第一级斜齿轮的螺旋角 1 β的旋 向已给出。 (1)为使Ⅱ轴轴承所受轴向力较小,试确定第二级斜齿轮螺旋角β的旋向, 并画出各轮轴向力、径向力及圆周力的方向。 (2)若已知第一级齿轮的参数为:Z 1 =19,Z 2 =85,m n =5mm,0 20 = n α,a=265mm, 轮1的传动功率P=,n 1 =275 r/min。试求轮1上所受各力的大小。 解答: 1.各力方向:见题解10-6图。 2.各力的大小:m N 045 . 217 m N 275 25 .6 9550 9550 1 1 1 ? = ? ? = ? =n P T 148 . 11 , 9811 .0 265 2 ) 85 19 ( 5 2 ) ( cos2 1 1= = ? + ? = + =β β a z z n m ; mm 83 . 96 cos 1 1 = =β z n m d; N 883 tan , N 1663 cos tan , N 4483 2000 1 1 1 1 1 1 1 1 1 = = = = = =β β α t a t r t F F n F F d T F ; 题10-7图示为直齿圆锥齿轮-斜齿圆柱齿轮减速器,为使Ⅱ轴上的轴向力 抵消一部分,试确定一对斜齿圆柱齿轮螺旋线的方向;并画出各齿轮轴向力、径向 力及圆周力的方向。 解答:齿轮3为右旋,齿轮4为左旋; 力的方向见题解10-7图。 题解 题
↓ 题10-9 设计一冶金机械上用的电动机驱动的闭式斜齿圆柱齿轮传动, 已知:P = 15 kW,n 1 =730 r/min,n 2 =130 r/min,齿轮按8级精度加工,载荷有严重冲击,工作时间t =10000h,齿轮相对于轴承为非对称布置,但轴的刚度较大,设备可靠度要求较高,体积要求较小。(建议两轮材料都选用硬齿面) 解题分析:选材料→确定许用应力→硬齿面,按轮齿的弯曲疲劳强度确定齿轮的模数→确定齿轮的参数和几何尺寸→校核齿轮的接触疲劳强度→校核齿轮的圆周速度 解答:根据题意,该对齿轮应该选用硬齿面,其失效形式以轮齿弯曲疲劳折断为主。 1. 选材料 大、小齿轮均选用20CrMnTi 钢渗碳淬火([1]表11-2),硬度为56~62HRC ,由[1]图 11-12 和[1]图11-13查得:MPa 1500,MPa 430lim lim ==H F σσ 2.按轮齿弯曲疲劳强度进行设计 (1)确定FP σ 按[1]式(11-7 P227)计算,取6.1,2min ==F ST S Y ;齿轮的循环次数: 8111038.41000017306060?=???==at n N ,取11=N Y ,则: 538MPa MPa 16 .124301m in lim 1=??== N F ST F FP Y S Y σσ (2)计算小齿轮的名义转矩T 1
机械专业齿轮设计课程设计说明书范本
机械设计课程设计说明书 设计题目:带式输送机传动装置中的二级圆柱齿轮减速器 机械系机械设计与制造专业 设计者: 指导教师: 2010 年07月02日
目录 一、前言 (3) 1.作用意义 (3) 2.传动方案规划 (3) 二、电机的选择及主要性能的计算 (4) 1.电机的选择 (4) 2.传动比的确定 (5) 3.传动功率的计算 (6) 三、结构设计 (8) 1.齿轮的计算 (8) 2.轴与轴承的选择计算 (12) 3.轴的校核计算 (14) 4.键的计算 (17) 5.箱体结构设计 (17) 四、加工使用说明 (20) 1.技术要求 (20) 2.使用说明 (21) 五、结束语 (21) 参考文献 (22)
一、前言 1.作用及意义 机器一般是由原动机、传动装置和工作装置组成。传动装置是用来传递原动机的运动和动力、变换其运动形式以满足工作装置的需要,是机器的重要组成部分。传动装置是否合理将直接影响机器的工作性能、重量和成本。合理的传动方案除满足工作装置的功能外,还要求结构简单、制造方便、成本低廉、传动效率高和使用维护方便。 本设计中原动机为电动机,工作机为皮带输送机。传动方案采用了两级传动,第一级传动为二级直齿圆柱齿轮减速器,第二级传动为链传动。 齿轮传动的传动效率高,适用的功率和速度范围广,使用寿命较长,是现代机器中应用最为广泛的机构之—。本设计采用的是二级直齿轮传动(说明直齿轮传动的优缺点)。 说明减速器的结构特点、材料选择和应用场合。 综合运用机械设计基础、机械制造基础的知识和绘图技能,完成传动装置的测绘与分析,通过这一过程全面了解一个机械产品所涉及的结构、强度、制造、装配以及表达等方面的知识,培养综合分析、实际解决工程问题的能力, 2.传动方案规划 原始条件:胶带运输机由电动机通过减速器减速后通过链条传动,连续单向远传输送谷物类散粒物料,工作载荷较平稳,设计寿命10年,运输带速允许误差为% 。 5 原始数据:
带传动和齿轮传动设计 说明书
机械设计大作业(二) 题目:带传动与齿轮传动设计 院系:过程装备与控制工程09(1)班姓名:沈益飞 学号:B09360114
目录 一、任务书 (3) (一)原始数据 (3) (二)工作量 (3) 二、电机的选择 (3) (一)各级效率 (3) (二)工作机所需功率 (3) (三)电机所需功率 (3) (四)电机所需转速范围 (3) (五)电机选择 (3) 三、传动参数的计算 (4) (一)各级传动比分配 (4) (二)各轴转速 (4) (三)各轴功率 (4) (四)各轴转矩 (4) (五)汇总数据 (4) 四、V带传动的设计计算 (5) (一)计算功率 (5) (二)选择V带带型 (5) (三)确定带轮基准直径并验算带速 (5) (四)确定中心距,并选择V带的基准长度 (5) (五)验算小带轮包角 (5) (六)确定带的初拉力与压轴力 (6) (七)带轮的材料与结构形式 (6) 五、齿轮传动的设计计算 (6) (一)选定齿轮类型、精度等级、材料与齿数 (6) (二)按齿面接触强度设计 (6) (三)按齿根弯曲强度设计 (7) (四)几何尺寸计算 (7)
一、任务书 (一)原始数据 选择题号4:减速器输出轴转矩T=249 N.m 减速器输出轴转速n=96 r/min V 带传动与齿轮传动简图 见《机械设计作业集1》p41 (二)工作量 1.小带轮零件图一张 2.大齿轮零件图一张 3.设计说明书一份 二、电机的选择 (一)各级效率 由《机械设计课程设计》表2-4(p7)机械传动的效率概略值 0.940.9850.955=?=带η 0.9550.9850.97=?=柱η (二)工作机所需功率 kw n T p w 503.2962499550/=?=?= (三)电机所需功率 kw p p w o 788.28977.0/503.2/===η (四)电机所需转速范围 由《机械设计课程设计》表2-1(p4)常用机械传动的单机传动比推荐值 min /2304min /57696)246(r r n i n o --=?-=?' ='? (五)电机选择 由《机械设计课程设计》表20-1(p196)Y 系列三相异步电机技术数据 得Y132S-6型号电机的额定功率Pm=3 kw ,满载转速:Nm=960 r/min
3Z型行星齿轮减速器设计
1.绪论 1.1课题研究的背景和意义 “十一五”期间我国将按照国家储备与企业储备相结合,以国家储备为主的方针,统一规划,分批建设国家战略石油储备基地。为了快速建立起我国独立的石油储备基地,根据我国国情石油储备形式以大型工业油罐为主。 在使用大型油罐进行原油储备的过程中,遇到最关键的问题就是油泥的问题,储运重未经提炼制的原油重平均约含2.2%的油泥,即对一个10万立方的储罐来说,灌满原油后其中约有2200立方的油泥成点在油罐底部。如不及时清除,再次加入原油是油泥将继续累积在一起,形成硬块,为油罐的检查及清洗增加困难。而且数量如此巨大的油泥存在于油罐底部,不经减小油罐的有效储存空间,降低储存周期寿命,造成进出阀的阻塞,而且较厚的油泥层使浮顶灌的浮顶不能不下降到底而引起浮顶倾斜,对储油安全造成威胁。因此大型原油储罐在建立时就必须增设油泥防止和消除系统,以增加油罐的储油效率,提高储油安全性,减小清灌难度。 大型原油储罐灌底油泥的防止和消除方法主要是在灌内增加油泥的混合搅拌系统,使油泥破碎细化,便于通过管线输出,我们选用了旋转喷射搅拌器。但是,其喷嘴口径相对于大型储罐的直径而言是很小的,喷嘴固定是射流束的搅拌范围是有限的,于是,在旋转喷射器入口处设置轴流涡轮,考循环油泵加压后的原油流动带动轴流涡轮高速旋转,旋转的涡轮通过主轴带动结构上完全隔绝的传动箱内一系列的减速传动使喷嘴缓慢旋转,而且通过传动箱内有关参数的选择来调节喷嘴旋转的速度,是从喷嘴喷出的射流也随之缓慢旋转,射流可打击到油罐底周向任一位置的油泥,实现彻底清除油泥,不留死角的功能。 可见,旋转喷射器中减速箱是工业油罐底油泥旋转喷射混合系统中重要的一部分。高速旋转的涡轮带动喷水嘴低速的转动,中间需要一个传动比很大的减速器连接。 1.2行星齿轮减速器研究现状及发展动态 行星齿轮传动与普通定州齿轮传动相比较,具有质量小,体积小,传动比大,承载能力大以及传动平稳和传动效率高等优点,这些已经被我过越来越多的机械工程技术人员所了解和重视。由于在各种类型的行星齿轮传动种均有效地利用了功率分流性和输入,输出地同轴性以及合理的采用了内啮合,才使得其具有了上述的许多独特的优点。行星齿轮传动不仅适用于高速,大功率而且可用于低速,大转矩的机械传动装置上。它可以用作减速,增速和变速传动,运动的合成和分解,以及其特殊的应用中:
行星减速器设计
目录 第一章概述 (1) 第二章要求分析 (2) (一) ............................................................... 原始数据2(二) ........................................................... 系统组成框图2 第三章方案拟定 (4) 第四章传动系统的方案设计 (5) 传动方案的分析与拟定 (5) 1. 对传动方案的要求 (5) 2. 拟定传动方案 (5) 第五章行星齿轮传动设计 (6) (一)行星齿轮传动比和效率计算 (6) (二)行星齿轮传动的配齿计算 (6) 1. 传动比条件 (6) 2. 同轴条件 (6) 3. 装配条件 (7) 4. 邻接条件 (7) (三)行星齿轮传动的几何尺寸和啮合参数计算 (8) (四) ............................................... 行星齿轮传动强度计算及校核10 1 、行星齿轮弯曲强度计算及校核 (10) 2、................................................... 齿轮齿面强度的计算及校核11 3、..................................................... 有关系数和接触疲劳极限11 (五) .................................................. 行星齿轮传动的受力分析13(六) .......................................... 行星齿轮传动的均载机构及浮动量15(七) ................................................... 轮间载荷分布均匀的措施15第六章行星轮架与输出轴间齿轮传动的设计 (17) (一)................................................... 选择齿轮材料及精度等级17(二)..................................................... 按齿面接触疲劳强度设17(三)................................................... 按齿根弯曲疲劳强度计算18
机械基础-案例07 闭式斜齿圆柱齿轮传动
闭式斜齿圆柱齿轮传动 设计一闭式斜齿圆柱齿轮传动。已知传递的功率P 1=20kW ,小齿轮转速 n 1=1000r/min ,传动比i=3,每天工作16h ,使用寿命5年,每年工作300天,齿轮对称布置,轴的刚性较大,电机带动,中等冲击,传动尺寸无严格限制。 解:设计步骤见表 1.选定材料、热处理方式、精度等级、齿数等 小轮:40Cr 调质 HB 1=241~286,取260HBW ; 大轮:45调质 HB 2=197~255,取230HBW ; 7级精度 取z 1=27,则大轮齿数z 2=i z 1=3×27=81, 对该两级减速器,取z=1。 初选螺旋角 =14° 2.确定许用弯曲应力 δHlim1=710MPa ,δHlim2=580MPa , δFlim1=600MPa ,δFlim2=450MPa , 安全系数取S Hlim =1.1 S Flim =1.25 N 1=60×1000×5×300×16=14.4×108 N 2= N 1/i=14.4×108/3=4.8×108 得:Z N1=0.975 Z N2=1.043 Y N1=0.884 Y N2=0.903 MPa S Z H N H H 3 .6291.1975.0710][min 1 1lim 1=?== σσ MPa S Z H N H H 550 1 .1043 .1580][min 2 2lim 2=?= = σσ MPa S Y Y F X N F F 32 .42425.11884.0600][min 1 11lim 1=??== σσ MPa S Y Y F X N F F 08 .32525 .11 903.0600][min 2 22lim 2=??= = σσ
杨可桢《机械设计基础》(第6版)复习笔记及课后习题详解(含考研真题)-齿轮传动【圣才出品】
第11章齿轮传动 11.1复习笔记 【通关提要】 本章主要介绍了标准直齿圆柱齿轮传动、标准斜齿圆柱齿轮传动及标准直齿锥齿轮传动的作用力和强度计算。学习时需要掌握齿轮传动的作用力分析及计算、失效形式及设计准则、计算载荷及参数选择,多以选择题、填空题和简答题的形式出现。针对三种齿轮传动的强度计算,由于计算难度较大,通常以选择题和简答题的方式考查其中的重难点,比如设计计算中,许用应力的计算和选取,齿轮的受力分析等。复习本章时不应以计算为重点,需理解记忆其中要点。 【重点难点归纳】 一、轮齿的失效形式和设计计算准则 1.轮齿的失效形式(见表11-1-1) 表11-1-1轮齿的失效形式
2.齿轮设计计算准则 (1)对于闭式齿轮传动,必须计算轮齿弯曲疲劳强度和齿面接触疲劳强度。对于高速重载齿轮传动,还必须计算其抗胶合能力。对于一般的传动,选择恰当的润滑方式和润滑油的牌号和粘度。 (2)对于开式传动,只需计算轮齿的弯曲疲劳强度,以免轮齿疲劳折断。 二、齿轮材料及热处理(见表11-1-2) 表11-1-2齿轮材料及热处理
三、齿轮传动的精度 1.误差对传动的影响 (1)影响传递运动的准确性; (2)影响传动的平稳性; (3)影响载荷分布的均匀性。 2.齿轮传动精度等级的选用 齿轮的精度按国家标准规定,可分为13个精度等级:0级最高,12级最低。常用的是6~9级精度。 四、直齿圆柱齿轮传动的作用力及计算载荷(见表11-1-3) 表11-1-3直齿圆柱齿轮传动的作用力及计算载荷
五、直齿圆柱齿轮传动的齿面接触强度计算(见表11-1-4) 表11-1-4直齿圆柱齿轮传动的齿面接触强度计算