基于UG的平面连杆机构运动仿真和分析
基于UG的平面连杆机构运动仿真和分析
宋晓华;汪建平
【期刊名称】《农机化研究》
【年(卷),期】2005(000)001
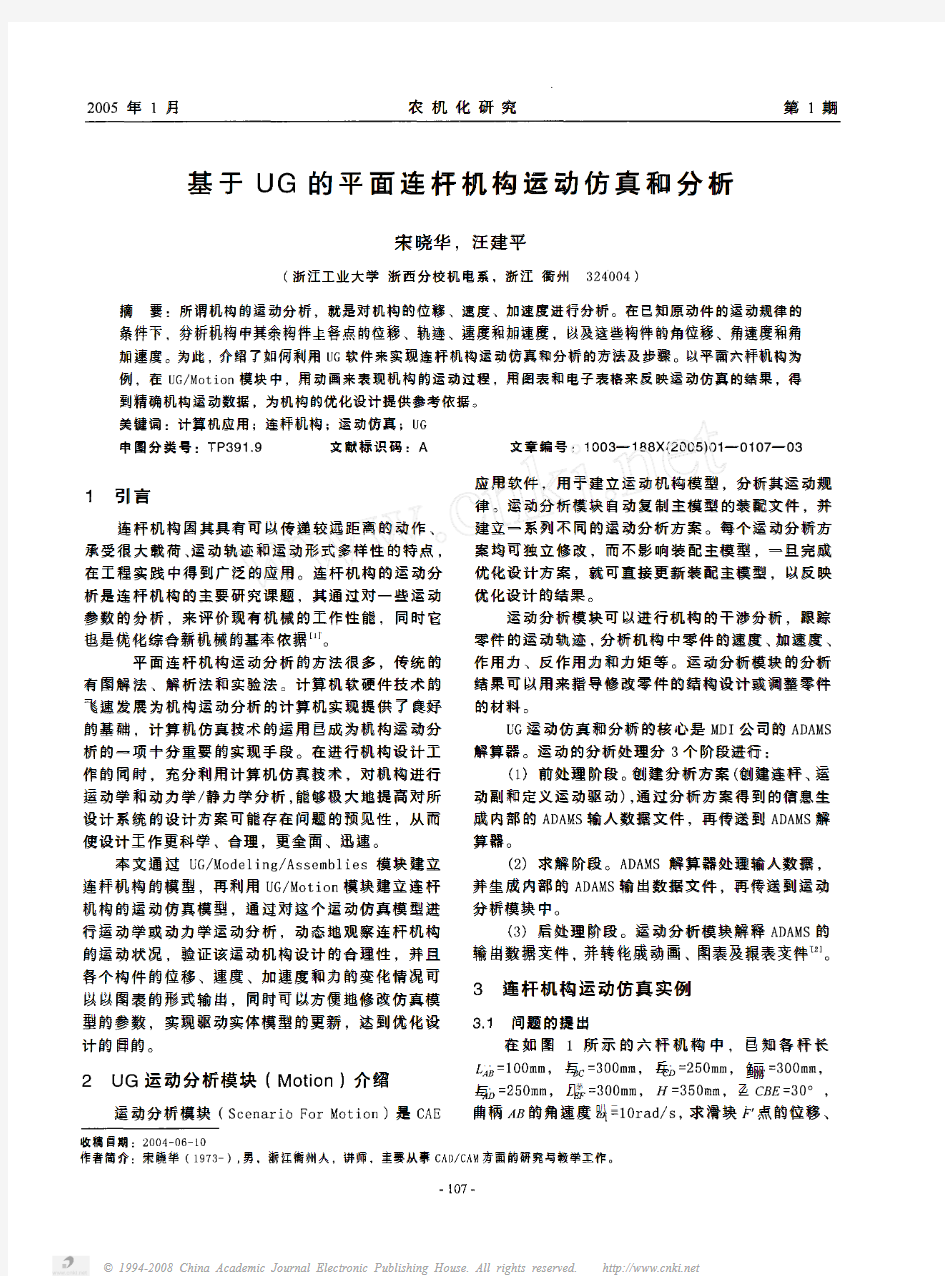
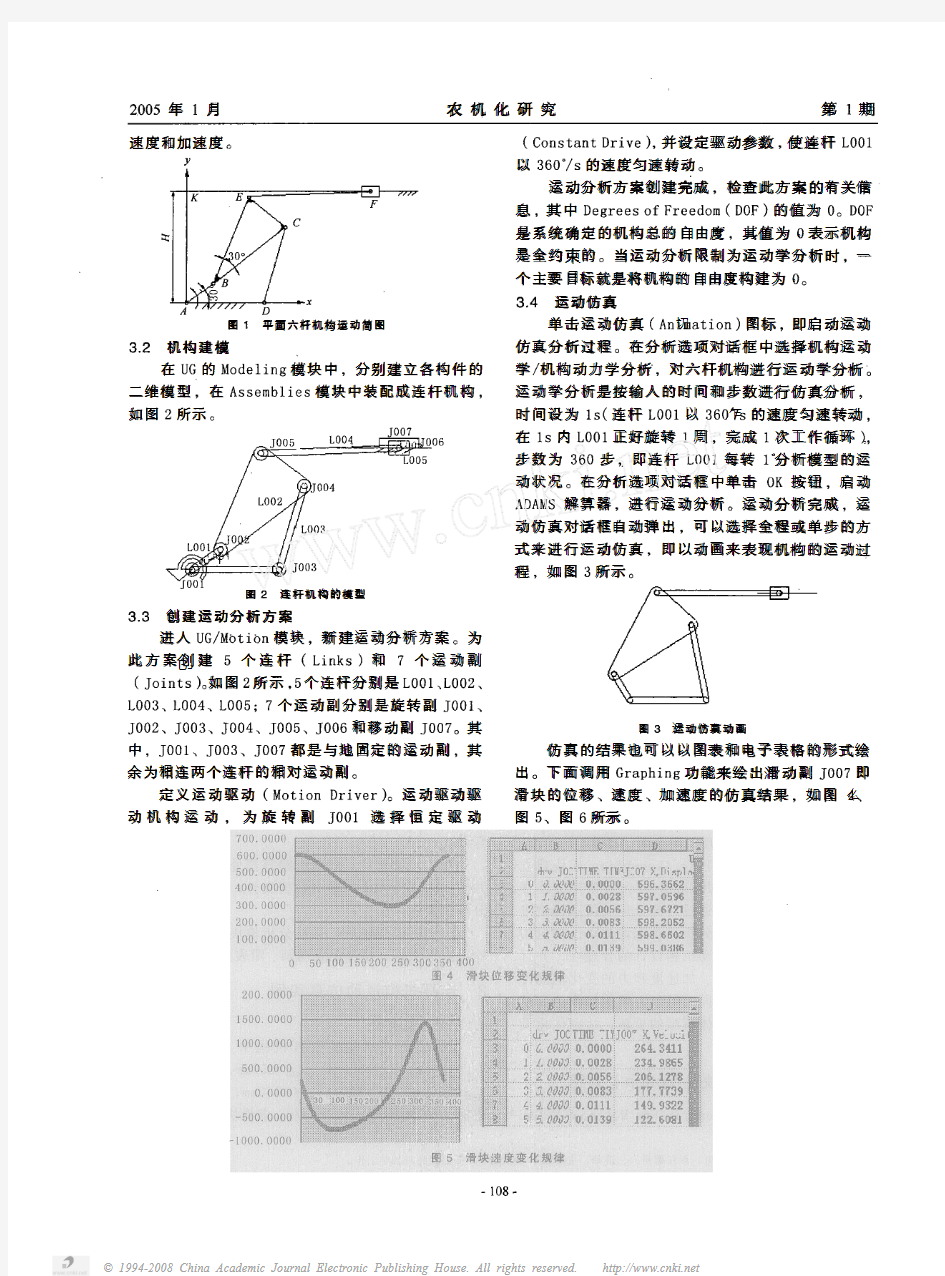
【摘要】所谓机构的运动分析,就是对机构的位移、速度、加速度进行分析.在已知原动件的运动规律的条件下,分析机构中其余构件上各点的位移、轨迹、速度和加速度,以及这些构件的角位移、角速度和角加速度.为此,介绍了如何利用UG 软件来实现连杆机构运动仿真和分析的方法及步骤.以平面六杆机构为例,在UG/Motion模块中,用动画来表现机构的运动过程,用图表和电子表格来反映运动仿真的结果,得到精确机构运动数据,为机构的优化设计提供参考依据.
【总页数】3页(107-109)
【关键词】计算机应用;连杆机构;运动仿真;UG
【作者】宋晓华;汪建平
【作者单位】浙江工业大学,浙西分校机电系,浙江,衢州,324004;浙江工业大学,浙西分校机电系,浙江,衢州,324004
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于UG的发动机曲柄连杆机构三维建模及运动仿真 [J], 孙慧; 王峰
2.基于UG NX4.0的连杆机构运动学仿真 [J], 郑立斌; 陈全园; 李轲
3.基于UG的平面连杆机构的运动分析与应用 [J], 葛晓忠; 詹葵华; 钟克
4.基于UGNX的空间连杆机构运动仿真分析 [J], 杨南
相关主题