画出下列有限自动机的状态转换图
习题3
3-1 画出下列有限自动机的状态转换图,并说明它所识别或接受的语言是什么?
①M=({S,A,B,C},{0,1},f,S,{S}),其转换函数为:
f(S,0)=B f(B,0)= S
f(S,1)=A f(B,1)= C
f(A,0)=C f(C,0)= A
f(A,1)=S f(C,1)= B
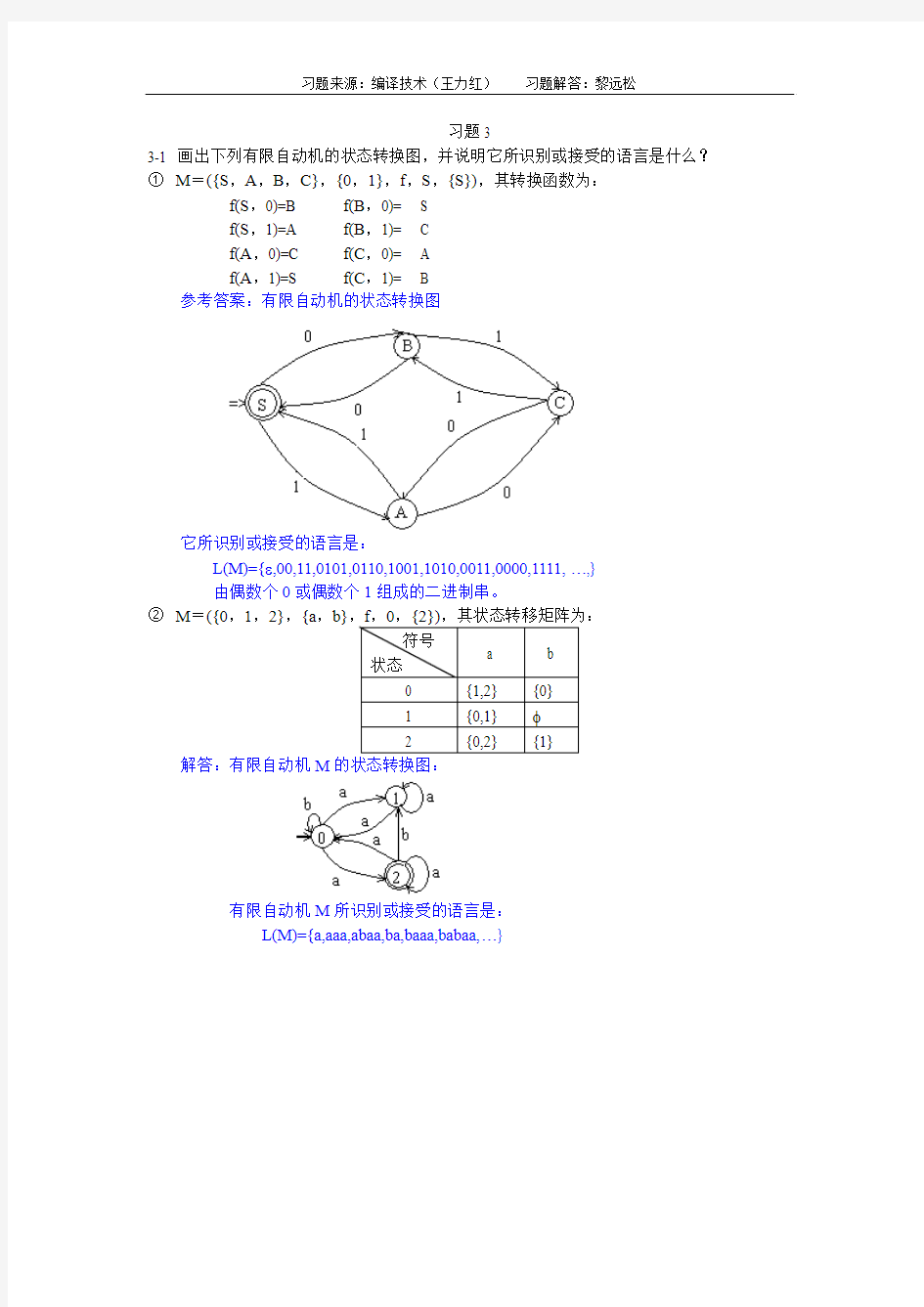
参考答案:有限自动机的状态转换图
它所识别或接受的语言是:
L(M)={ε,00,11,0101,0110,1001,1010,0011,0000,1111,…,}
由偶数个0或偶数个1组成的二进制串。
②M=({0,1,2},{a,b}
解答:有限自动机M的状态转换图:
有限自动机M所识别或接受的语言是:
L(M)={a,aaa,abaa,ba,baaa,babaa,…}
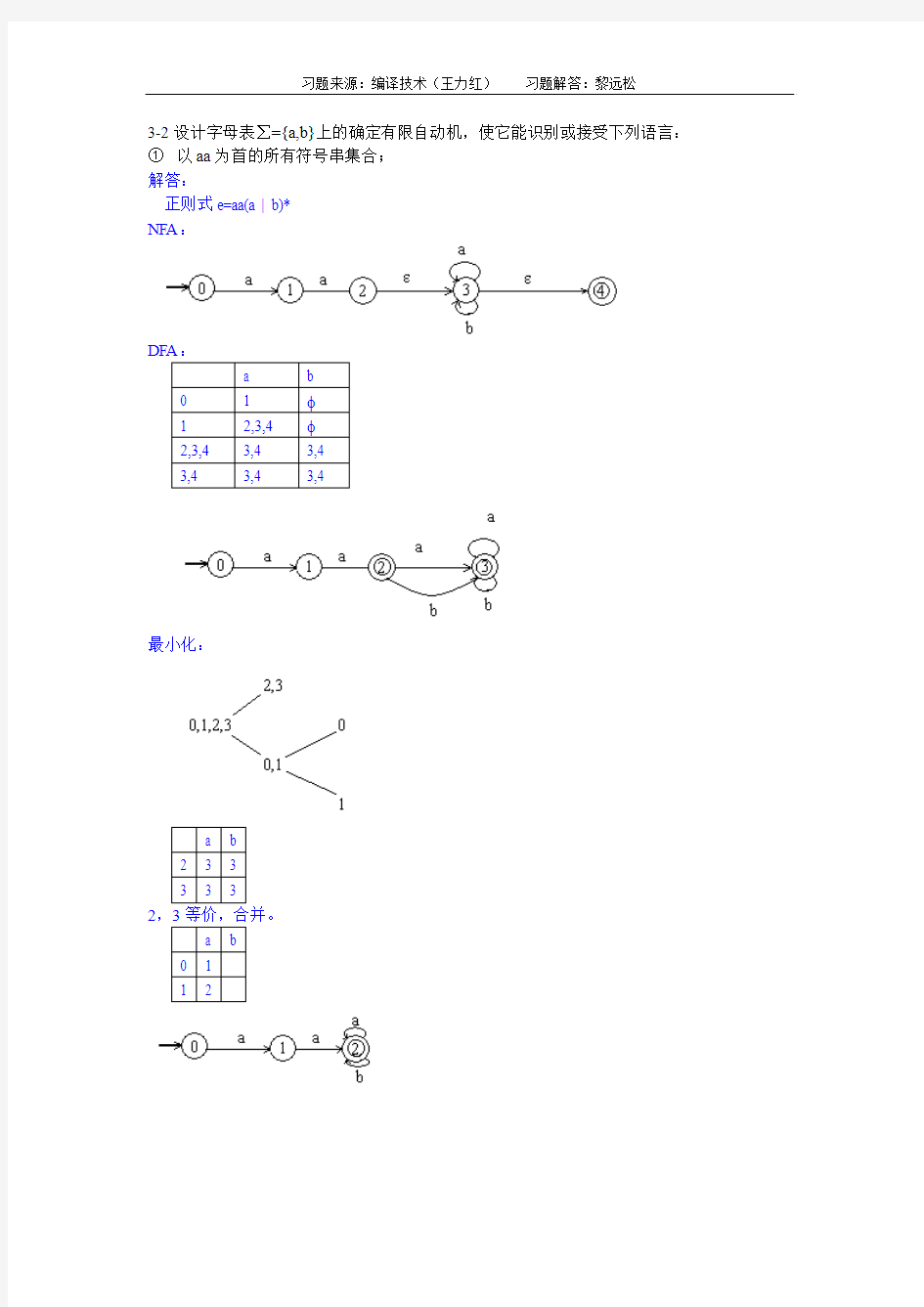
3-2设计字母表∑={a,b}上的确定有限自动机,使它能识别或接受下列语言:①以aa为首的所有符号串集合;
解答:
正则式e=aa(a | b)*
NFA:
最小化:
2
②以aa结尾的所有符号串集合;
e=(a|b)*aa
{X}为0
{X,A}为1
③含有相继两个a或相继两个b的所有符号串集合。
e=(a|b)*(aa|bb)(a|b)*
3-3 试把下述NFA变换为DFA。
解答:
最基本的方法是子集法:
重命名:
{0}为0,{1}为1,{1,2}为2,包含原终态2的{1,2}为新终态,于是所求DFA为:
解:最基本的方法:子集法:
重命名:
3-4 试把下列εFA变换为非εFA。
参考答案:
用子集法:
3-5 试把下列FA确定化(若需要的话)和最小化。
参考答案:
2,4状态是死状态,应删除。
只有一个状态的FA肯定是确定化的和最小化的。
此FA是DFA,不需要确定化。
最小化:
首先按终态与非终态划分:{0,1},{2,3,4,5};然后计算:
对于输入a,b,{0,1}1等价。
对于输入a,{2,4}后继属于同一集合{0,1},{3,5}后继属于同一集合{3,5},故可继续划分为:{2,4},{3,5}。进一步计算:
3,5等价。
合并等价状态,最小化为:
3-6 构造下列正则表达式对应的确定有限自动机。
①a(b | a)*aba
②a(abab* | a(bab)*a)*b
3-7 写出下列FA所对应的正则表达式。
①在FA M的转换图上加进一个初态结X和一个终态结Y。消去(0,1,b)这条弧:
e=(a(b+a)*)*
②消去(2,1,a)这条弧:e=ab(ab|ba|a)*
3-8 构造正则文法GLsl
·S‘mBI m
B?’mB nSlm
所对应的有限白动机。
3-9 给出下面的确定有限自动机所对应的正则文法。
3-11 用某种高级语言写出:
①非确定有限自动机确定化的算法;
②有限自动机简化的算法;
③把正则表达式转换为有限自动机的算法。
不确定有限状态自动机的确定化
编译原理实验报告 实验名称不确定有限状态自动机的确定化 实验时间 院系计算机科学与技术学院 班级 学号 姓名
1.试验目的 输入:非确定有限(穷)状态自动机。 输出:确定化的有限(穷)状态自动机 2.实验原理 一个确定的有限自动机(DFA)M可以定义为一个五元组,M=(K,∑,F,S,Z),其中: (1)K是一个有穷非空集,集合中的每个元素称为一个状态; (2)∑是一个有穷字母表,∑中的每个元素称为一个输入符号; (3)F是一个从K×∑→K的单值转换函数,即F(R,a)=Q,(R,Q∈K)表示当前状态为R,如果输入字符a,则转到状态Q,状态Q称为状态R的后继状态; (4)S∈K,是惟一的初态; (5)Z?K,是一个终态集。 由定义可见,确定有限自动机只有惟一的一个初态,但可以有多个终态,每个状态对字母表中的任一输入符号,最多只有一个后继状态。 对于DFA M,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记符连接形成的字符串可为DFA M所接受。若M的初态结点同时又是终态结点,则称ε可为M所接受(或识别),DFA M所能接受的全部字符串(字)组成的集合记作L(M)。 一个不确定有限自动机(NFA)M可以定义为一个五元组,M=(K,∑,F,S,Z),其中: (1)k是一个有穷非空集,集合中的每个元素称为一个状态; (2)∑是一个有穷字母表,∑中的每个元素称为一个输入符号; (3)F是一个从K×∑→K的子集的转换函数; (4)S?K,是一个非空的初态集; (5)Z?K,是一个终态集。 由定义可见,不确定有限自动机NFA与确定有限自动机DFA的主要区别是: (1)NFA的初始状态S为一个状态集,即允许有多个初始状态; (2)NFA中允许状态在某输出边上有相同的符号,即对同一个输入符号可以有多个后继状态。即DFA中的F是单值函数,而NFA中的F是多值函数。 因此,可以将确定有限自动机DFA看作是不确定有限自动机NFA的特例。和DFA一样,NFA也可以用矩阵和状态转换图来表示。 对于NFA M,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记(ε除外)连接形成的字符串可为M所接受。NFA M所能接受的全部字符串(字)组成的集合记作L(M)。 由于DFA是NFA的特例,所以能被DFA所接受的符号串必能被NFA所接受。 设M 1和M 2 是同一个字母集∑上的有限自动机,若L(M 1 )=L(M 2 ),则称有 限自动机M 1和M 2 等价。
有限状态自动机模型
龙源期刊网 https://www.360docs.net/doc/1616404224.html, 有限状态自动机模型 作者:刘威 来源:《新课程·教师》2015年第09期 当我们用计算机进行问题的求解时,首先需要用适当的数据进行问题表示,然后再设计 相应的算法对这些数据进行变换处理来获得问题的求解结果。因此,对问题进行建模和形式化表示,然后进行处理是进行计算机求解的基本途径。数理逻辑、自动机理论给出了如何描述一些基本问题以及如何建立问题的抽象表示,并通过对这些抽象化的表示的性质和它的变化方法进行研究。这些模型都是问题数学模型的典范,给计算机问题求解提供了坚实的理论基础,是计算机求解问题的重要方法和思想。 计算机科学与技术学科是以数学和电子学科为基础发展起来的,一方面研究计算机领域 中的一些普遍规律,描述计算的基本概念与模型,其重点是描述现象、解释规律。另一方面是包括计算机硬件、软件的计算机系统设计和实现的工程技术,简单地说,计算机科学与技术学科通过在计算机上建立模型并模拟物理过程来进行科学调查和研究,它系统地研究信息描述和变换算法,主要包括信息描述和变换算法的理论、分析、效率、实现和应用。 所有问题的描述都要以计算机能识别的语言来实现,计算机语言的文法描述提供了生成 语言的手段,但是,对于语言句子的识别来说,我们需要一些识别语言的模型,我们可以称这种模型为语言的识别模型。这种识别模型应该满足必要的约束条件,首先模型具有有穷个状态,不同的状态代表不同的意义。按照实际的需要,模型可以在不同的状态下完成特定语言的识别。我们可以将输入数据中出现的符号组成一个字符的列表。模型将输入数据作为线性表来进行处理和变换。模型有一个初始的状态,它是系统的开始状态,系统在这个状态下开始进行问题的求解。模型中还有一些状态表示它到目前为止所读入的字符构成的字符串是模型从开始状态引导到这种状态的所有字符串构成的语言就是模型所能识别的输入。我们可以将此模型对应成有穷状态自动机的物理模型,在处理问题的时候,它可以接受一个关于问题的输入数据,数据以字符串的形式提供,我们把这些输入数据划分成一系列的小部分,每个部分由若干字符组成,为了不让输入数据量影响该模型对问题的处理,我们约定,输入数据从开始输入时的时间点开始处理,输入状态可以是无穷的,这就是说,从输入第一部分数据开始,输入端可以有任意长度的输入序列。而且,模型有一个有穷状态控制器,该控制器的状态只有有穷多个,并且规定,模型的每一个动作分为三步,读入待输入的字符,根据当前的状态和读入的字符改变有穷控制器的状态,读下一部分输入数据。计算机的各个组成部分,既包括硬件系统也包括软件系统,都可以对其进行形式化的定义,计算机的硬件系统包括中央处理器、存储器、外部设备,可以形式化地用一个三元组来描述,对计算机个各个硬件部分进行管理的软件的功能也可以用形式化的方法来描述,例如,操作系统的各个功能模块、处理器管理、线程调度、文件系统、设备驱动程序、网络通信管理、虚拟内存管理等都可以进行形式化的定义。有穷状态机就是进行这种形式化定义的模型,有穷状态机是一个五元组,分别是描述状态的有穷非空集合,它称为有穷状态机的一个状态,输入符号表,所有输入有穷状态机的关于问题的描述都是这个符号表中的符号组成的字符串。状态转换函数,表示有穷状态自动机在某一状态读入字符,将
编译原理词法分析--A__状态转换图-直接转向法-伪代码描述
int code, value; strToken := ““; GetChar(); //将下一字符读入ch中, 搜索指示器前移一个字符位置 GetBC(); //检查ch中的字符是否为空白,若是调用GetChar直至读入非空白字符if (IsLetter())//判断ch中的字符是否为字母 begin while (IsLetter() or IsDigit()) begin Concat(); //将ch中的字符连接到strToken之后 GetChar(); End Retract(); //将搜索指示器回退一个字符位置, 将ch置为空 code = Reserve(); //对strToken中的字符串查找保留字表,若是,返回编码;否则返回0 if (code = 0) begin value := InsertId(strToken); //将strToken中的标识符插入符号表,返回指针 return ($ID, value); end else return (code, -); end else if (IsDigit())//判断ch中的字符是否为数字 begin while (IsDigit)) begin Concat(); GetChar(); End Retract(); Value := InsertToken(); //将strToken中的标识符插入常数表,返回指针 return ($INT, value); end else if (ch = ‘=’)return ($ASSIGN, -); else if (ch = ‘+’)return ($PLUS, -); else if (ch = ‘*’) begin GetChar(); if (ch = ‘*’) return ($POWER,-); Retract(); return ($STAR,-); end else if (ch = ‘;’)return ($SEMICOLON, -); else if (ch = ‘(’)return ($LPAR, -);
有限状态自动机的确定化
有限状态自动机的确定化 姓名:翟彦清学号:E10914127 一、实验目的 设计并实现将 NFA确定化为DFA的子集构造算法,从而更好地理解有限自动机之间的等价性,掌握词法分析器自动产生器的构造技术。该算法也是构造LR分析器的基础。 输入:非确定有限(穷)状态自动机。 输出:确定化的有限(穷)状态自动机二、实验原理 一个确定的有限自动机(DFA M可以定义为一个五元组,M k( K,E, F, S, Z),其中: (1)K是一个有穷非空集,集合中的每个元素称为一个状态; (2)刀是一个有穷字母表,刀中的每个元素称为一个输入符号; (3)F是一个从K XE^ K的单值转换函数,即 F (R, a)= Q ( R, Q€ K)表示当前状态为R,如 果输入字符 a,则转到状态 Q,状态Q称为状态R的后继状态; (4)S€ K,是惟一的初态; (5)Z K,是一个终态集。 由定义可见,确定有限自动机只有惟一的一个初态,但可以有多个终态,每个状态对字母表中的任一输入符号,最多只有一个后继状态。 对于DFAM,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记符连接形成的字符串可为DFAM所接受。若M的初态结点同时又是终态结点,则称&可为 M所接受(或识别),DFA M所能接受的全部字符串(字)组成的集合记作 L(M)。 一个不确定有限自动机(NFA M可以定义为一个五元组,M=(K, E, F, S, Z), 其中:( 1) k 是一个有穷非空集,集合中的每个元素称为一个状态; (2)E是一个有穷字母表,E中的每个元素称为一个输入符号; (3)F是一个从K xE^ K的子集的转换函数; (4)S K,是一个非空的初态集; (5)Z K,是一个终态集。 由定义可见,不确定有限自动机 NFA与确定有限自动机DFA的主要区别是: (1)NFA的初始状态S为一个状态集,即允许有多个初始状态; (2)NFA中允许状态在某输出边上有相同的符号,即对同一个输入符号可以有多个后继状态。即DFA中的F是单值函数,而NFA中的F是多值函数。 因此,可以将确定有限自动机DFA看作是不确定有限自动机NFA的特例。和DFA—样,NFA也可以用矩阵和状态转换图来表示。 对于NFAM,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记(&除外)连接形成的字符串可为M所接受。NFAM所 能接受的全部字符串(字)组成的集合记作 L(M)。 由于DFA是 NFA的特例,所以能被DFA所接受的符号串必能被NFA所接受。 设M和M是同一个字母集E上的有限自动机,若 L (M)= L (M),贝U称有限自动机M和M等价。 由以上定义可知,若两个自动机能够接受相同的语言,则称这两个自动机等价。DFA是 NFA的特例,因此对于每一个 NFAM总存在一个DFAM,使得L (M) 二L (M)。即一个不确定有限自动机能接受的语言总可以找到一个等价的确定有限自动机来接受该
计算机模型
前言: 话说梦想关于计算机有一天能像人一样思考的科幻作品是一个已经比较古老的主题了。甚至还有人专门设计了的类似“机械人三原则”之类的具体设想,以此来分析将来计算机智能一旦发展到人的智商我们究竟会面临哪些问题。 不过对于另一些科学家来说,往往他们考虑问题的深度可能不够,他们通常更多的是先考虑如何实现某个技术,至于实现该技术后带来的一切社会、政治问题他们都先不作考虑。我想大概研究武器的科学家比较突出吧。总而言之,无论计算机智能高度发展可能带来什么样的危机。能够实现计算机高度拟人化思维的设想永远是计算机研究者的一个梦想。 然而,计算机本身是否具有能像人一样思考的潜力呢?计算机想要模拟人的思考方式究竟要向那些方向发展呢?我在学习了计算机运算原理之后得到了很大的启示。在此跟大家分享一下,好引起激烈争论,活跃论坛气氛。 PS:本人向来拒绝一切用高深词汇和难以理解的专用名词把一个本来容易理解的问题变得难以接受。下面的内容我尽量的用浅显的道理解释。特别是希腊字母我又打不出来,因此涉及专门的数学证明的地方有兴趣的朋友可以参考相关资料。 1,什么是计算机的运算原理(Theory of computation) 所谓运算原理,或者计算原理。就是研究计算机究竟是用什么方法来工作的。通过理解计算机的工作方法,我们可以推断出计算机究竟能做什么和不能做什么。以及用什么方法才能完成某些工作。这就相当于我们研究一下收音机是如何工作的,就能知道收音机能接受什么信号,不能接受什么信号。 计算机科学虽然发展的越来越快,计算机的性能从数字上越来越高。但是仍然有些事情是单靠发展计算机性能无法实现的。就好像你加大收音机的接受频段,也不可能打出一张X光相片一样。 这里需要指出一点,对于有一定编程基础的朋友而言要区分计算机运算原理并不是计算机算法原理。所谓算法,大家都清楚,是用一个类似程序的流程方法把程序表述出来。比如排序算法,你可以选择大数往后排,或者小的数字往前排。然后考虑一下哪种算法在哪种情况下运行效率比较高,哪种算法存储空间效率比较高等等。计算原理完全是另一个概念,它往往不会具体到某一个算法,它可以告诉你计算机“能”或“不能”执行某一种任务。以及一旦要执行一个非常困难的任务,我们应该向哪个方向考虑。这里面更多的是用数学的概念来进行推导和证明。 那么为了研究计算机的运算方法,我们把计算机简化成为几种非常简单的模型。根复杂的计算机系统比,这些模型看起来可以用简陋形容。但是他们对于我们理解计算机的能力却又是必不可少的工具。 计算机的简单模型主要分为三种:有限状态自动机Finite Automaton(FA),下推自动机Push Down Automaton(PDA),以及图灵机Turing machine。这三种模型一个比一个复杂,一个比一个功能更强大。当然这些名词看起来有点玄。我马上用简单的语言给大家解释一下。 2,有限状态自动机(简称FA) 所谓自动机,其实就是不需要人为干预指可以自动执行某个任务的机器。说白了也就是计算
不确定有穷状态自动机的确定化实验报告
编译原理实验报告(二) E01214055 鲁庆河 1.实验名称: 不确定有穷状态自动机的确定化 2.实验目的: a)输入:非确定有穷状态自动机NFA b)输出:确定化的有穷状态自动机DFA 3.实验原理: a)NFA确定化为DFA 同一个字符串α可以由多条通路产生,而在实际应用中,作为描述控制过程的自动机,通常都是确定有限自动机DFA,因此这就需要将不确定有限自动机转换成等价的确定有限自动机,这个过程称为不确定有限自动机的确定化,即NFA确定化为DFA。 b)NFA的确定化算法 ----- 子集法: ●若NFA的全部初态为S1,S2,…,S n,则令DFA的初态为: S=[S1,S2,…,S n],其中方括号用来表示若干个状态构成的某一状态。 ●设DFA的状态集K中有一状态为[S i,S i+1,…,S j],若对某符号a∈∑,在NFA中有F({ S i,S i+1,…,S j},a) ={ S i’,S i+1’,…,S k’ },则令F({ S i,S i+1,…,S j },a)={ S i’,S i+1’,…,S k’ }为DFA的一个转换函数。 若[ S i’,S i+1’,…,S k‘ ]不在K中,则将其作为新的状态加入到K中。 ●重复第2步,直到K中不再有新的状态加入为止。 ●上面得到的所有状态构成DFA的状态集K,转换函数构成DFA的F,DFA的字母表仍然是NFA的字母表∑。 ●DFA中凡是含有NFA终态的状态都是DFA的终态。 c)closure(I)函数,move(I,a)函数的 假设I是NFA M状态集K的一个子集(即I∈K),则定义ε-closure(I)为: 1.若Q∈I,则Q∈ε-closure(I); 2.若Q∈I,则从Q出发经过任意条ε弧而能到达的任何状态Q’,则Q’∈closure(I)。 3.状态集ε-closure(I)称为状态I的ε闭包。 假设NFA M=( K,∑,F,S,Z ),若I∈K,a∈∑,则定义I a=closure(J),其中J是所有从closure(I)出发,经过一条a弧而到达的状态集。 NFA确定化的实质是以原有状态集上的子集作为DFA上的一个状态,将原状态间的转换为该子集间的转换,从而把不确定有限自动机确定化。经过确定化后,状态数可能增加,而且可能出现一些等价状态,这时就需要简化。 4.实验思路:(数据结构及变量设计等)
不确定有限状态自动机的确定化(NFA TO DFA)
不确定有限状态自动机的确定化(NFA TO DFA)
不确定有限状态自动机的确定化(NFA TO DFA)2008-12-05 22:11 #include
void eclouse(char c,string &he,edge b[]) { int k; for(k=0;k 第32卷第9期2010年9月 北京科技大学学报Jou rnal of U niversity of Sc i ence and T echno l ogy B eijing V o.l 32No .9Sep .2010 模糊数学和有限状态机矩阵形式描述的人工情绪模型 史雪飞 王志良 张 琼 北京科技大学信息工程学院,北京100083 摘 要 根据大脑的情绪加工环路提出了三个层次的人工情绪框架结构.重点对智能体的底层情绪模型进行了研究,分别采用模糊关系理论和有限状态机的矩阵形式建立了相应的情绪激活状态和行为输出方程.模型考虑了心境和需求对当时情绪的影响,利用矩阵模型可以直接计算出不同情绪状态下的输出行为,解决了单纯用表的形式记录/事件)情绪)行为0序列对的存储空间和查表问题.选择了婴儿的情感行为数据来验证模型的正确性.仿真结果表明:模型在考虑了敏感因子和心境对情绪激活阀值影响的因素后,在机器系统中可以建立有效的情绪与行为输出模型.关键词 模糊关系;有限自动机;情绪模型;人工智能分类号 T P 181 M odelli ng e moti on based on fuzzy mathe m atics and m atrix descri pti on of fi nite state machi nes S H I Xue -fei ,WAN G Zh i -li ang ,ZHANG Q iong School of Infor mati on E ngi neeri ng ,U n i vers it y of Science and T echnology Be iji ng ,Beijing 100083,Ch i na AB STRACT A t hree -l ayer emo ti on m ode l structure based on bra i n science was proposed firstly .T hen a bo ttom -leve l emo ti on m ode l o f t he i ntelli g ent syste m was presented in de tai.l Itw as constructed by usi ng fuzzy m athe m atics andm a trix descr i pti on o f fi n ite state m a -ch i nes .A f uzzy re l a ti on bet w een sti m u l us and e m otion w as produced to de ter m i ne the ac tive e m otion i n conside ration o fm ood and de -sire a t that ti m e .The outpu t behav i o r w as calculated by a m atr i x sty l e o f fi n ite sta te m ach i nes wh ile the active e m oti on w as g iven .T he m ode l constructed in this w ay cou l d reduce m e m ory spaces used only f o r st o ri ng the correspond i ng re l ations a m ong sti m u l us ,emo ti on and behav i or .T he si m ulati on result and concl us i on are presen ted i n the end .K EY W ORDS f uzzy relation ;fi n ite autom aton ;e m otion mode llin g ;artificial i nte lli g ence 收稿日期:2009 --11--16基金项目:国家高技术研究发展计划资助项目(2007AA04Z218);北京市自然科学基金重点项目(KZ200810028016) 作者简介:史雪飞(1973)),女,讲师,博士研究生,E-m ai:l sxf 1245@i es .u st https://www.360docs.net/doc/1616404224.html, .cn;王志良(1956)),男,教授,博士生导师 人工智能的研究从20世纪50年代开始发展到现在已经达到了较高的水平,它的研究内容也从模拟人的感知觉、推理和学习等认知智能逐渐扩展到人的情绪和情感.目前人工情感已成为人工智能领域的研究热点.其中,如何赋予机器情感智力(即情绪建模问题)是研究的核心,其基础和根本是对自然情绪实质的理解和表示.近年来,国内外已有许多人工情绪的模型 [1- -7].由于情绪的复杂性以及人类对自身情感产生和变化规律的研究尚不完善,情绪建模的研究工作进行得比较艰难甚至对这一问题本身的提出也存在着争议.尽管如此,目前在情感计算领域己经有很多 人工情绪模型的出现,它们至少从功能的角度上实现了对人类情绪有限的模仿.最早的经典情绪模型是1988年O rtony 等 [1] 提出的/OCC 情绪认知模 型0.它是基于情绪的认知理论和基于规则的建模, 因为很容易用计算机实现而得到广泛使用.然而,情绪不仅由单一的认知评价过程产生,还与一些低层次的非认知性因素影响有密切联系.英国伯明翰大学的S l o m an [2] 提出的/Cog A ff 模型0同时考虑了 低层的身体反应机制和高层的心理认知对情感的影响,建立了情感的三层体系结构,但是这些抽象的模 型没有提供一个具体的可供计算机执行的情感建模方法.人类情绪的激活具有一定程度的不确定性, 元胞自动机N a S c h模型及其M A T L A B代码 标准化管理部编码-[99968T-6889628-J68568-1689N] 元胞自动机N a S c h模型及其M A T L A B代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: 模型参数取值:Lroad=1000,p=0.3,Vmax=5。 边界条件:周期性边界。 数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。 基本图(流量-密度关系):需整个密度范围内的。 时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致,画500个时间步即可)。 指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。 流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 时间、空间和车辆速度都被整数离散化。道路被划分为等距离的离散的格子,即元胞。 每个元胞或者是空的,或者被一辆车所占据。 车辆的速度可以在(0~Vmax)之间取值。 2、NaSch模型运行规则 在时刻t到时刻t+1的过程中按照下面的规则进行更新: (1)加速:vnmin(vn1,vmax) 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:vnmin(vn,dn) 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0) 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:vnxnvn,车辆按照更新后的速度向前运动。其中vn,xn分别表示第n辆车位置和速度;l(l≥1)为车辆长度; p表示随机慢化概率;dnxn1xn1表示n车和前车n+1之间空的元胞数; vmax为最大速度。 3、NaSch模型实例 计算机组成原理与结构期末论文 有限自动机的原理及示例 学院: 专业: 姓名: 学号: 有限自动机的原理及示例 本文将介绍几种重要有限自动机的基本原理,并通过例子说明它们的运行过程。 一. 语言的基本概念 一张字母表是一个非空有限集合∑,字母表∑中的每个元素x 称为∑中的一个字母,也称符号、终止符或者字符。 ∑中有限个字符1,,n a a 有序地排列起来 12n x a a a = 就称为∑上的一个字符串,n 称为它的长度。其中有一个特殊的串ε,它的长度为零。 若1∑和2∑都是字母表,则它们的乘积12∑∑定义为 {}12121122,a a a ∑∑=∈∑∈∑:a , 特别地, 0121 {} n n ε-∑=∑=∑ ∑=∑∑ ∑=∑∑ 令 *01k k k k ∞=∞+=∑=∑∑=∑ 若*,,x y z ∈∑,且 z xy = 则称,x y 是z 的子串。 字母表∑上的一种语言是*∑的一个子集L 。 二. 有限状态自动机的原理和运算实例 1.基本原理 一个有限状态自动机的物理模型通常包括两部分: (1)一个输入存储带,带被分解为多个单元,每个单元存放一个输入符号(字 母表上的符号),整个输入串从带的左端点开始存放,而带的右端可以无限扩充。 (2)一个有限状态控制器(FSC ),该控制器的状态只能是有限个;FSC 通过一个读头和带上单元发生耦合,可以读出当前带上单元的字符。初始时,读头对应带的最左单元,每读出一个字符,读头向右移动一个单元。 有限状态自动机的一个动作为:读头读出带上当前单元的字符;FSC 根据当前FSC 的状态和读出的字符,改变FSC 的状态;并将读头右移一个单元。 接着给出有限状态自动机的数学模型。 字母表∑上的一个有限状态自动机(FSAM)是一个五元组 ()0,,,,,FSAM Q q F δ=∑ 其中, i)Q 是一个有限状态的集合; ii)∑是字母表,它是输入带上的字符的集合; iii)0q Q ∈是开始状态; iv)F Q ?是接收状态(终止状态)集合; v):Q Q δ?∑→是状态转换函数,(,)q x q δ'=表示自动机在状态q 时,扫描字符x 后到达状态q '。 对于有限状态自动机M ,给定字母表上的串12n w w w w = ;初始时,自动机M 处于开始状态0q ;从左到右逐个字符地扫描串12n w w w w = ;在011(,)q w q δ=的作用下,自动机M 处于状态1q ,在122(,)q w q δ=的作用下,自动机M 处于状态2q ,……当将串w 扫描结束后,若自动机处于某一个接收状态,则称有限状态自动机能够接收(识别)串w 。对于自动机而言,从开始状态开始,在扫描串的过程中,状态逐个地变化,直到某个接收状态,把状态的变化过程称为自动机的一条路径,而这条路径上所标记的字符的连接,就是自动机所识别的串。 有时为了表述方便,也采用如下定义的扩展的状态转换函数 **:Q Q δ?∑→ *(,)q w q δ'= 不确定有限状态自动机的确定化 【实验目的】 输入:非确定有限(穷)状态自动机。 输出:确定化的有限(穷)状态自动机。 【实验原理】 同一个字符串α可以由多条通路产生,而在实际应用中,作为描述控制过程的自动机,通常都是确定有限自动机DFA,因此这就需要将不确定有限自动机转换成等价的确定有限自动机,这个过程称为不确定有限自动机的确定化,即NFA确定化为DFA。 NFA确定化的实质是以原有状态集上的子集作为DFA上的一个状态,将原状态间的转换为该子集间的转换,从而把不确定有限自动机确定化。经过确定化后,状态数可能增加,而且可能出现一些等价状态,这时就需要简化。 【程序代码】 #include string first;//边的初始结点 string change;//边的条件 string last;//边的终点 }; int N;//NFA的边数 vector 有限自动机ATM机状态转换 0引言 有限自动机源于20世纪40年代,是一种用于研究离散事件动态系统的数学模型,1943年麦克卡赛(McCulloch)与皮特斯(Pitts)建立了模拟神经网络的自动机。1956年莫尔(Moore)建立了描述计算机的时序机的概念。此后,自动机理论迅速发展,与计算机技术密切结合,在人工智能、自动控制等领域有广泛应用。有限自动机是计算机科学的重要基石,它可以用来研究时序线路与计算机的构造,是计算机硬件的理论基础。由于计算机中的数以二进制形式表示,所以计算机基本的加法器功能可以用有限自动机来实现。计算机的操作系统在信息处理进程中需要一定资源。在不同资源条件下,进程处于不同的状态。进程活动中要不断提出申请资源和归还资源的请求,这些请求与进程的状态和资源的条件有关。操作系统的这些活动体现了一个有限自动机的功能特征,因此操作系统的信息处理过程可以用有限自动机来刻画。 1 ATM机状态分析 ATM机是当前银行较为常用的一种用户自助操作的机器,它是以实时操作系统软件基础实现的强实时系统。ATM机具有事务的基本特性,即:原子性、一致性、隔离性、持久性。其中,原子性保证了事务的操作是一个完整的过程,要么做,要么不做;一致性:保证事务从一个一致性状态转换到另外一个一致性状态,此特性与原子性密切相关;隔离性:即一个事务的执行不被其他事务所干扰,各事务之间执行互不干扰;持久性:即一个事务一旦提交,它对数据库中的数据改变就是永久性的。从插卡到某个动作操作成功为一个原子操作,要么成功,提交事务,更新数据库;要么失败,退回到插卡前的操作,数据库中数据仍为原来的数据,不发生改变。本文从ATM机的基本状态出发来讨论ATM机中的状态迁移。 ATM机的基本状态包含了插卡,输入密码,余额查询,取款,存款,转账,退出这几个基本状态。其中初始阶段为等待插卡阶段,此阶段等待磁卡的插入;插入以后则系统状态变为插卡状态,此状态判断插入的磁卡是否有效,有效则跳转到输入密码状态,系统状态变为登录状态,此时可以根据需要进行查询、取款、存款、转账等状态的转换;若输入密码错误则继续保持插卡状态等待正确的用户 操 作 说 明 书 市瑞林工控自动化设备 : 审核(Checked) 周军 2013-8-1. 制定(Prepared) 艳平 2013-8-1 5.4 人机界面操作说明:(操作人机界面时请勿用硬物触击) 界面分为:欢迎画面,主画面,自动画面,手动画面,参数设定画面,,产品数据画面,,产量清除画面(弹出画面),留言画面。 5.4.1 欢迎画面: 在欢迎画面中有本设备制造公司的名称、地址、网址、传真、。以方便客户与本公司联系。 图2: 欢迎画面 注:进入操作,需密码许可。用户名;1,密码:565638 5.4.3自动画面: 在自动画面上也可对目标产量进行设定,可显示实际产量、达成率 ,可对自动/手动、连动/单动,真空泵等按键进行控制.可点击相应按键进入手动画面.有报警信息显示窗口 有报警 时,在此 处可显示 报警原因 图4: 自动画面 1) 换盘清零:当料盘没有做完需换盘时,请按此键清零,否则会按上一盘的取料顺序 进行取料。 2) 拔料关:关闭此开关,拔料动作不做,请根据产品拔料情况进行选择。 4) 真空泵开关:此开关是用来控制真空泵是否工作,如关闭则真空泵不工作,自动运行时 请打开真空泵,否则无法启动。 5)单步关:单步打开时,在自动运行状态下,按一下启动按钮,就做一个动作。 6) 程序复位: 当程序动作做到一半时,不想继续做完时,需按“程序复位”键进行复位, 然后重新启动。。 7)手动/自动转换键:此按键是用来进行手动/自动模式转换的,在手动模式时,机器只能进行手动。在自动模式时,机器才能进行自动运行。 8) 单动/连动:此键只有在自动模式时才有效,在单动时,机器起动后只做一个单循环动, 然后自动停止。连动模式时,机器可连续动作,直到按下停止键、急停键或有异常发 生时,机器才会停止。 9)画面转换键:点击“主画面”键,可进入主画面,点击“手动画面”键,可进入手动第一个画。 PCwrite PCSource=00 ALUSrcA=00 ALUSrcB=01 IorD=0 IRwrite MemRead ALUop=0000 开始取指令 ALUSrcA=00 ALUSrcB=11 ALUop=0000 指令译码寄存器取数 ALUSrcA=01 ALUSrcB=10 ALUop=0000 Op=’LW ’ or Op=’SW ’ MemRead IorD=1 1 储存器访问 Op=’SW ’ MemWrite IorD=1 Op=’LW ’ 储存读完成 MemRead IorD=1 Op=’J ’ PCwrite PCSource =10 Op=BEQ ALUSrcA=01 ALUSrcB=00 ALUop=01 PCWriteCond PCSource=01 CondControl=00 RegWrite Regist=0 MemtoReg =0 储存地址计算 Op=BLTZ ALUSrcA=01 ALUSrcB=00 ALUop=0001 PCSource=01 PCWriteCond CondControl=01 Op=BGTZ ALUSrcA=01 ALUSrcB=00 ALUop=0111 PCSource=01 PCWriteCond CondControl=10 Op=’SLTI ’ ALUSrcA=01 ALUSrcB=10 ALUop=0101 Op=ADD-Sub-Xor-And-Or-Nor-SLT-ALLV-SRA V ALUSrcA=01 ALUSrcB=00 ALUop=0011 R 型完成 Op=SLT ALUSrcA=01 ALUSrcB=00 ALUop=0011 RegDst=1 RegWrite MemtoReg=0 ALUSrcA=00 ALUSrcB=00 ALUop=0011 Op=SLL-SRL-SRA ‘SRA’ or ’SRL ’ Op=’Jr ’ ALUSrcA=01 ALUSrcB=00 ALUop=0011 PCSource=01 PCWrite ALUSrcA=01 ALUSrcB=10 ALUop=1000 ALUSrcA=01 ALUSrcB=10 ALUop=1100 ALUSrcA=01 ALUSrcB=10 ALUop=1101 ALUSrcA=01 ALUSrcB=10 ALUop=1110 OP = ‘ADDI’ OP = ‘ADI’ OP = ‘ORI’ OP = ‘XORI’ 此指令周期结束, 进入下一指令周期(取指) 元胞自动机NaSch模型及其MATLAB代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: 模型参数取值:Lroad=1000,p=0.3,Vmax=5。 边界条件:周期性边界。 数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。 基本图(流量-密度关系):需整个密度范围内的。 时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。 指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。 流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 时间、空间和车辆速度都被整数离散化。道路被划分为等距离的离散的格子, 即元胞。 每个元胞或者是空的,或者被一辆车所占据。 车辆的速度可以在(0~Vmax)之间取值。 2、NaSch模型运行规则 在时刻t到时刻t+1的过程中按照下面的规则进行更新: (1)加速:vn min(vn 1,vmax) 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:vn min(vn,dn) 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化:以随机概率p进行慢化,令:vn min(vn-1,0) 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:vn xn vn,车辆按照更新后的速度向前运动。其中vn,xn 分别表示第n辆车位置和速度;l(l≥1)为车辆长度; p表示随机慢化概率;dn xn1xn1表示n车和前车n+1之间空的元胞数;vmax为最大速度。 3、NaSch模型实例 根据题目要求,模型参数取值:L=1000,p=0.3,Vmax=5,用matlab软件进行编程,扔掉前11000个时间步,统计了之后500个时间步数据,得到如下基本图和时空图。 3.1程序简介 元胞自动机程序 L=100,中间两位为1,其余为零,迭代100次,做250种时空。 原程序:yubaozdj=zeros(256,8,'int8');%zeros为产生256*8的矩阵h=0; for i1=0:1 for i2=0:1 for i3=0:1 for i4=0:1 for i5=0:1 for i6=0:1 for i7=0:1 h=h+1; yubaozdj(h,1)=i1; yubaozdj(h,2)=i2; yubaozdj(h,3)=i3; yubaozdj(h,4)=i4; yubaozdj(h,5)=i5; yubaozdj(h,6)=i6; yubaozdj(h,7)=i7; end end end end end end end for i=1:256 figure x=zeros(100,1,'int8');x(50)=1;x(51)=1; for p1=1:100 for p2=1:100 if( x(p2)==1 ) plot(p2,p1,'*'); end end temp=x(1); for p3=1:100 temp1=x(p3); if(p3>1&&p3<100) x(p3)=yubaozdj(i,temp2*4+x(p3)*2+x(p3+1)+1); elseif(p3==1) x(1)=yubaozdj(i,x(100)*4+x(1)*2+x(2)+1); else x(100)=yubaozdj(i,temp2*4+x(100)*2+temp+1); end temp2=temp1; end end end模糊数学和有限状态机矩阵形式描述的人工情绪模型
元胞自动机NaSch模型及其MATLAB代码精修订
有限自动机的原理及示例
不确定有限状态自动机的确定化
有限自动机ATM机状态转换
自动机操作说明书1
状态转换图总图
元胞自动机NaSch模型和MATLAB代码
数学建模——元胞自动机模型