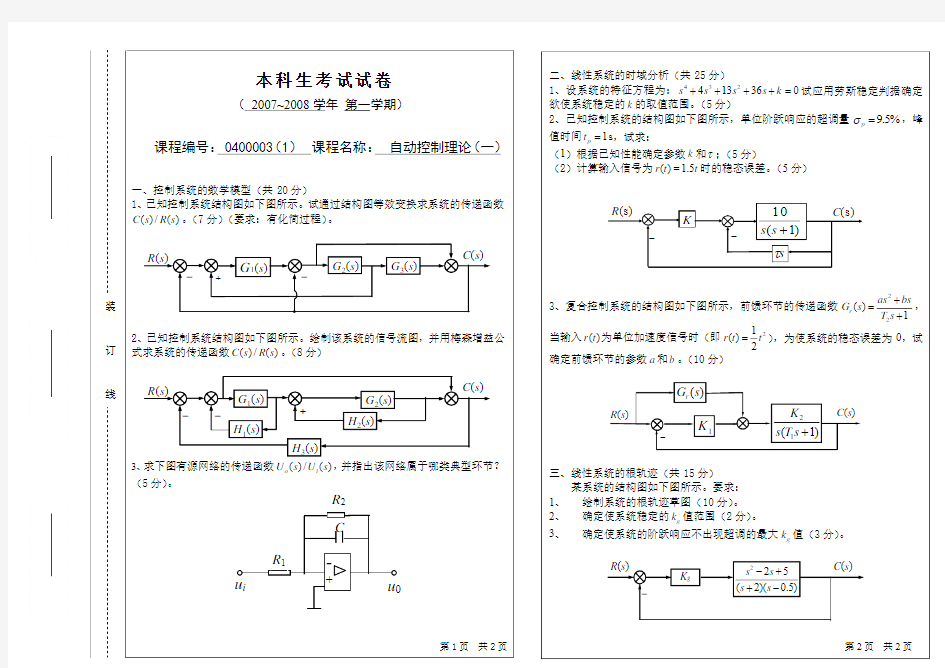
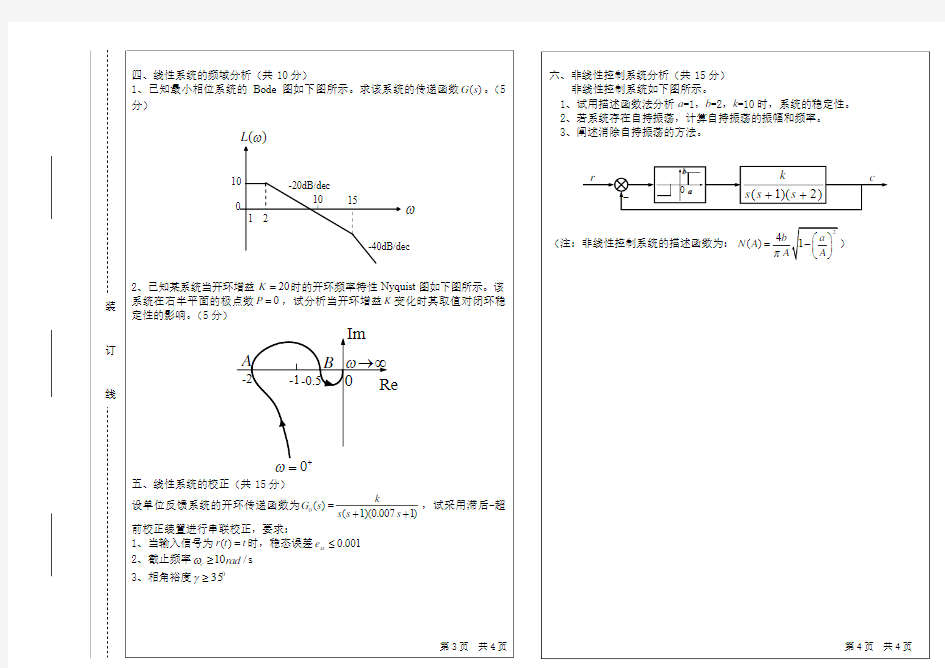
北理工自控期末考试题
北京理工大学汇编语言实验六磁盘文件存取实验报告
第六章磁盘文件存取实验(设计性实验) 一、实验要求和目的 1.理解文件、目录的概念; 2.了解FCB(文件控制块)方式文件管理方法; 3.掌握文件代号式文件存取方式; 4.学习使用文件指针读取文件 二、软硬件环境 1.硬件环境:计算机系统windows; 2.软件环境:装有MASM、DEBUG、LINK、等应用程序。 三、实验涉及的主要知识单元 DOS功能调用中断(INT 21H)提供了两类磁盘文件管理功能,一类是FCB(文件控制块)方式,另一类是文件代号式存取方式。 对于文件的管理,实际上是对文件的读写管理,DOS 设计了四种存取文件 方式:顺序存取方式、随机存取方式、随机分块存取方式和代号法存取方式。文件的处理步骤 A)写之前必须先建立文件、读之前必须先打开文件。 B)写文件之后一定要关闭文件。通过关闭文件,使操作系统确认此 文件放在磁盘哪一部分,写后不关闭会导致写入文件不完整。 1、文件代号式存取方式: 当用户需要打开或建立一个文件时,必须提供文件标识符。文件标识符用ASCII Z 字符串表示。ASCII Z 字符串是指文件标识符的ASCII 字符串后面再加1 个“0”字符。文件标识符的字符串包括驱动器名、路径名和文件名。其格式为 [d:][path]filename[.exe] 其中d 为驱动器名,path 为路径名,.exe 为文件名后缀。 中断 21H 提供了许多有关目录和文件操作的功能,其中文件代号式存取方式常用的功能如下: 2、操作目录的常用功能 39H——创建目录 3BH——设置当前目录 3AH——删除目录 47H——读取当前目录 有关中断功能的详细描述和调用参数在此从略,需要查阅者可参阅相关资料 之目录控制功能。 3、用文件句柄操作文件的常用功能 3CH——创建文件 4EH——查找到第一个文件 3DH——打开文件 4FH——查找下一个文件 3EH——关闭文件 56H——文件换名 3FH——读文件或设备 57H——读取/设置文件的日期和时间 40H——写文件或设备 5AH——创建临时文件 41H——删除文件 5BH——创建新文件
大学期末考试题
一、单项选择题(本大题共 20 小题,每小题 1 分,共 20 分) 1.咨询顾问最核心的能力是其( D ) A.专业水平B.策划力C.技术能力D.影响力 2.在设备结构优化战略实施过程中,为实行大批量生产,企业应提高比重的设备是(D) A.服役期短的设备B.技术水平高的设备C.通用型设备D.专用型设备 3.一般来讲,新兴产业的收入弹性系数( C ) A.小于 1 B.等于 1 C.大于 l D.不确定 4.一般来讲,标准产品的适宜推销方式是( D ) A.人员推销B.展示会C.关系营销D.广告 5.企业战略涉及期限较长,一般认为应( C ) A.至少 3 年B.3~5 年C.至少 5 年D.至少 10 年 6.财务管理咨询的主要对象是( C ) A.企业经营活动B.企业生产活动C.企业资本活动D.商品流通活动 7.为实现企业的目标利润而把成本费用控制在合理的水平之下的谋划与方略,属于 ( D ) A.成本结构优化战略B.成本控制战略C.节约成本战略D.目标成本战略 8.山东水泥厂张才奎同志身先士卒,不图报酬,参加全厂最苦的“打窑皮”,带领全厂职工一举扭转十年亏损的局面。张才奎实施的方案属于( B ) A.企业员工共同信念战略方案B.企业凝聚力方案C.企业整体战略方案D.企业职工形象方案 9.企业行为识别系统的简称是( B ) A.MI B.BI C.VI D.CIS 10.咨询机构在具体职位的设计中,首先应考虑( A ) A.工作的需要B.咨询人员的素质C.人际关系D.心理结构 11.企业使命和战略目标的咨询属于组织结构内( A) A.最高层次的咨询B.中间层次的咨询C.第二层次的咨询D.第三层次的咨询 12.企业成长第三阶段有可能发生的危机是( B ) A.专制危机B.控制危机C.领导危机D.丧失活力危机 13.新产品一般是指在以下哪一范围内第一次试制鉴定确认的产品?( C ) A.企业内B.企业所在地区C.一个省、市、自治区D.全国
北理工微机原理实验三 使用8251A的串行接口应用实验
本科实验报告 实验名称:实验三使用8251A的串行接口应用实验 课程名称:计算机原理与应用实验实验时间: 任课教师:实验地点: 实验教师: 实验类型:□原理验证■综合设计□自主创新 学生姓名: 学号/班级:组号:学院:同组搭档:专业:成绩:
1. 实验目的 1) 掌握串行通信原理及半双工和全双工的编程方法; 2) 掌握用8251A接口芯片实现微机间的同步和异步通信; 3) 掌握8251A芯片与微机的接口技术和编程方法。 2. 实验原理和内容 8251A是一种可编程的同步/异步串行通信接口芯片,具有独立的接收器和发送器,能实现单工、半双工、双工通信。 1) 8251A内部结构 8251A通过引脚D0~D7和系统数据总线直接接口,用于和CPU传递命令、数据、状态信息。读写控制逻辑用来接收CPU的控制信号、控制数据传送方向。CPU对8251A的读写操作控制表如表3-4所示。 表3-4 CPU对8251A的读写操作控制表 2) 8251A的方式控制字和命令控制字 方式控制字确定8251A的通信方式(同步/异步)、校验方式(奇校/偶校/不校)、字符长度及波特率等,格式如图3-10所示。 命令控制字使8251A处于规定的状态以准备收发数据,格式如图3-11所示。 方式控制字和命令控制字无独立的端口地址,8251A 根据写入的次序来区分。 CPU对8251A初始化时先写方式控制字,后写命令控制字。
3) 状态寄存器 8251状态寄存器用于寄存8251A的状态信息,供CPU查询,定义如图3-12所示。TXRDY位:当数据缓冲器空时置位,而TXRDY引脚只有当条件( 数据缓冲器空?/CTS?TXE)成立时才置位。 溢出错误:CPU没读走前一个字符,下一个字符又接收到,称为溢出错误。
北京理工大学汇编实验五
一、实验目的 1、掌握子程序有关基本知识,学会子程序设计方法; 2、掌握主程序与子程序之间的调用关系及调用方法; 3、掌握汇编语言字符串处理方法; 4、掌握字符串的输入输出程序设计方法; 5、掌握数制转换程序实现方法。 二、实验软硬件环境 1、硬件环境:惠普64 位一体化计算机及局域网; 2、软件环境:windows 8,红蜘蛛管理系统,MASM for Windows。 三、实验相关知识 把功能相对独立的程序段单独编写和调试,作为一个相对独立的模块供程序使用,就性成子程序。子程序可以实现源程序的模块化,可简化源程序结构,可以提高编程效率。 1) 子程序的定义语句格式 汇编语言子程序以proc 语句行开始,以endp 语句行结束。如: 过程名PROC near[或far] 过程体 .......................... 过程名ENDP 在主程序中用CALL 过程名调用。主程序和子程序之间传递参数通常通过栈来进行,当然也可以用某些缺省的寄存器或内存来传递。但以通过栈来传递参数程序的通用性最强。 2) 子程序调用说明 子程序从PROC 语句开始,以ENDP 语句结束,程序中至少应当包含一条RET 语句用以返回主程序。在定义子程序时,应当注意其距离属性:当子程序和调用程序在同一代码段中时,用NEAR 属性;当子程序及其调用程序不在同一个代码段中时,应当定义为FAR 属性。当由DOS 系统进入子程序时,子程序应当定义为FAR 属性。为执行子程序后返回操作系统,在子程序的前几条指令中设置返回信息。 3) 子程序使用中的问题 A、主程序调用子程序是通过CALL 指令来实现的。子程序执行后,通过RET 指令, 返回主程序调用指令CALL 的下一条指令,继续执行主程序。一个子程序可以由 主程序在不同时刻多次调用。如果在子程序中又调用了其他的子程序,则称为子程 序的嵌套。特别是当子程序又能调用子程序本身时,这种调用称为递归。 B、调用子程序时寄存器及所用存储单元内容的保护。如果子程序中要用到某些寄存器 或存储单元时,为了不破坏原有的信息,要将寄存器或存储单元的原有内容压栈保 护,或存入子程序不用的寄存器或存储单元中。 C、用于中断服务的子程序则一定要把保护指令安排在子程序中,这是因为中断是随机 出现的,因此无法在主程序中安排保护指令。 D、调用程序在调用子程序时需要传送一些参数给子程序,这些参数是子程序运算中所 需要的原始数据。子程序运行后要将处理结果返回调用程序。原始数据和处理结果 的传递可以是数据,也可以是地址,统称为参数传递。 E、参数传递必须事先约定,子程序根据约定从寄存器或存储单元取原始数据(称入口 参数);进行处理后将处理结果(称出口参数)送到约定的寄存器或存储单元,返回到调用程序。参数传递一般有下面三种方法:用寄存器传递:适用于参数传递较少、
大学人工智能期末考试题库
《人工智能与专家系统》试卷(1)参考答案与评分标准 问答题(每题5分,共50分) 1.人工智能是何时、何地、怎样诞生的?(5分) 答:人工智能于1956年夏季在美国达特茅斯(Dartmouth)大学诞生。(3分)1956年夏季,美国的一些从事数学、心理学、计算机科学、信息论和神经学研究的年轻学者,汇聚在Dartmouth大学,举办了一次长达两个月的学术讨论会,认真而热烈地讨论了用机器模拟人类智能的问题。在这次会议上,第一次使用了“人工智能”这一术语,以代表有关机器智能这一研究方向。这是人类历史上第一次人工智能研讨会,标志着人工智能学科的诞生,具有十分重要的意义。(2分) 2.行为主义是人工智能的主要学派之一,它的基本观点是什么?(5分) 答:行为主义,又称进化主义或控制论学派。这种观点认为智能取决于感知和行动(所以被称为行为主义),它不需要知识、不需要表示、不需要推理。其原理是控制论和感知——动作型控制系统。 3.什么是知识表示?在选择知识表示方法时,应该考虑哪几个因素?(5分)答:知识表示是研究用机器表示知识的可行性、有效性的般方法,是一种数据结构与控制结构的统一体,既考虑知识的存储又考虑知识的使用。知识表示实际上就是对人类知识的一种描述,以把人类知识表示成计算机能够处理的数据结构。对知识进行表示的过程就是把知识编码成某种数据结构的过程。(3分)在选择知识表示方法时,应该考虑以下几个因素:(1)能否充分表示相关的领域知识;(2)是否有利于对知识的利用;(3)是否便于知识的组织、维护和管理;(4)是否便于理解和实现。(2分) 4.框架表示法有什么特点?(5分) 答:框架表示法有如下特点:结构性、继承性、自然性。(5分) 5.何谓产生式系统?它由哪几部分组成?(5分) 答:把一组产生式放在一起,让它们相互配合,协同作用,一个产生式生成的结论可以供另一个产生式作为已知事实使用,以求得问题的解,这样的系统称为产生式系统。(2分) 产生式系统一般由三个基本部分组成:规则库、综合数据库和推理机。(3分) 6.产生式系统中,推理机的推理方式有哪几种?请分别解释说明。(5分)答:产生式系统推理机的推理方式有正向推理、反向推理和双向推理三种。 正向推理:正向推理是从己知事实出发,通过规则库求得结果。 反向推理:反向推理是从目标出发,反向使用规则,求证已知的事实。 双向推理:双向推理是既自顶向下又自底向上的推理。推理从两个方向进行, 直至在某个中间界面上两方向结果相符便成功结束;如两方衔接不上,则推理失败。
北京理工大学自动控制实验报告模板
实验1 控制系统的模型建立 一、实验目的 1. 掌握利用MATLAB 建立控制系统模型的方法。 2. 掌握系统的各种模型表述及相互之间的转换关系。 3. 学习和掌握系统模型连接的等效变换。 二、实验原理 1. 系统模型的 MATLAB描述 系统的模型描述了系统的输入、输出变量以及内部各变量之间的关系,表征一个系统的模型有很多种,如微分方程、传递函数模型、状态空间模型等。这里主要介绍系统传递函数(TF)模型、零极点增益(ZPK)模型和状态空间(SS)模型的MATLAB 描述方法。 1)传递函数(TF)模型 传递函数是描述线性定常系统输入-输出关系的一种最常用的数学模型,其表达式一般为 在MATLAB 中,直接使用分子分母多项式的行向量表示系统,即 num = [bm, bm-1, … b1, b] den = [an, an-1, … a1, a0] 调用tf 函数可以建立传递函数TF 对象模型,调用格式如下: Gtf = tf(num,den) Tfdata 函数可以从TF 对象模型中提取分子分母多项式,调用格式如下: [num,den] = tfdata(Gtf) 返回cell 类型的分子分母多项式系数 [num,den] = tfdata(Gtf,'v') 返回向量形式的分子分母多项式系数 2)零极点增益(ZPK)模型 传递函数因式分解后可以写成 式中,z1,z2…zm称为传递函数的零点,p1,p2…pn?称为传递函的极点,k 为传递系数(系统增益)。 在MATLAB 中,直接用[z,p,k]矢量组表示系统,其中z,p,k 分别表示系统的零极点及其增益,即:
z=[ z1,z2…zm]; p=[p1,p2…pn]; k=[k]; 调用zpk 函数可以创建ZPK 对象模型,调用格式如下: G= zpk(z,p,k) 同样,MATLAB 提供了zpkdata 命令用来提取系统的零极点及其增益,调用格式如下:[z,p,k] = zpkdata(Gzpk) 返回cell 类型的零极点及增益 [z,p,k] = zpkdata (Gzpk,’v’) 返回向量形式的零极点及增益 函数pzmap 可用于求取系统的零极点或绘制系统得零极点图,调用格式如下:pzmap(G) 在复平面内绘出系统模型的零极点图。 [p,z] = pzmap(G) 返回的系统零极点,不作图。 3)状态空间(SS)模型 由状态变量描述的系统模型称为状态空间模型,由状态方程和输出方程组成: 其中:x 为n 维状态向量;u 为r 维输入向量; y 为m 维输出向量; A 为n×n 方阵,称为系统矩阵; B 为n×r 矩阵,称为输入矩阵或控制矩阵;C 为m×n 矩阵,称为输出矩阵; D为m×r 矩阵,称为直接传输矩阵。 在MATLAB 中,直接用矩阵组[A,B,C,D]表示系统,调用ss 函数可以创建ZPK 对象模型,调用格式如下: Gss = ss(A,B,C,D) 同样,MATLAB 提供了ssdata 命令用来提取系统的A、B、C、D 矩阵,调用格式如下:[A,B,C,D] = ssdata (Gss) 。它返回系统模型的A、B、C、D 矩阵。 4)三种模型之间的转换 上述三种模型之间可以互相转换,MATLAB 实现方法如下 TF 模型→ZPK 模型:zpk(SYS)或tf2zp(num,den) TF 模型→SS 模型:ss(SYS)或tf2ss(num,den) ZPK 模型→TF 模型:tf(SYS)或zp2tf(z,p,k) ZPK 模型→SS 模型:ss(SYS)或zp2ss(z,p,k) SS 模型→TF 模型:tf(SYS)或ss2tf(A,B,C,D)
北京理工大学汇编语言实验报告实验五 子程序设计实验
实验五子程序设计实验(设计性实验) 一、实验要求和目的 1.熟悉汇编语言程序设计结构; 2.熟悉汇编语言子程序设计方法; 3.熟悉利用汇编语言子程序参数传递方法; 4.熟悉汇编语言字符串处理基本指令的使用方法; 5.掌握利用汇编语言实现字符串的输入输出程序设计方法; 6.掌握数制转换程序实现方法。 二、软硬件环境 1、硬件环境:计算机系统windows; 2、软件环境:装有MASM、DEBUG、LINK、等应用程序。 三、实验涉及的主要知识 A)子程序知识要点: 1、掌握子程序的定义语句; 过程名 PROC [near/far] 过程体 RET 过程名 ENDP 2.子程序结构形式 一个完整的子程序一般应包含下列内容: 1. )子程序的说明部分 在设计了程序时,要建立子程序的文档说明,使用户能清楚此子程序的功能和调用方法. 说明时,应含如下内容: .子程序名:命名时要名中见意. .子程序的功能:说明子程序完成的任务; .子程序入口参数:说明子程序运行所需参数及存放位置; .子程序出口参数:说明子程序运行结果的参数及存放位置; .子程序所占用的寄存器和工作单元; .子程序调用示例; 2、)掌握子程序的调用与返回 在汇编语言中,子程序的调用用CALL,返回用RET 指令来完成。 .段内调用与返回:调用子程序指令与子程序同在一个段内。因此只修改IP; .段间调用与返回:调用子程序与子程序分别在不同的段,因此在返回时,需同时修改CS:IP。 3.)子程序的现场保护与恢复 保护现场:在子程序设计时,CPU 内部寄存器内容的保护和恢复。 一般利用堆栈实现现场保护和恢复的格式: 过程名PROC [NEAR/FAR]
四川大学期末考试试题(A卷).doc
四川大学期末考试试题(A卷) (2013——2014 学年第一学期) 课程号:303066030课序号:课程名称:计算机基础及C程序设计语言 任课教师:刘亚梅刘洋任瑞玲曾晓东余勤罗伟王茂宁王忠邓丽华成绩: 适用专业年级:2012级学生人数:印题份数:学号:姓名: 考试须知 四川大学学生参加由学校组织或由学校承办的各级各类考试,必须严格执行《四川大学考试工作管理办法》和《四川大学考场规则》。有考试违纪作弊行为的,一律按照《四川大学学生考试违纪作弊处罚条例》进行处理。 四川大学各级各类考试的监考人员,必须严格执行《四川大学考试工作管理办法》、《四川大学考场规则》和《四川大学监考人员职责》。有违反学校有关规定的,严格按照《四川大学教学事故认定及处理办法》进行处理。 一、单项选择题(每题1.5分,共45分)(注:本题及以下各题均以VC++6.0为软件编程平台) 1.一个C程序总是从_______开始执行的。 A)main函数B)程序的第一行 C)程序的第一个函数D)不固定位置 2.以下对C语言的描述正确的是。 A)函数允许嵌套定义B)编译时不检查语法 C)用户所定义的标识符必须以字母开头D)转义字符以“\”开头 3.下列C语言中运算对象必须是整型的运算符是。 A) %= B) && C) = D) *= 4.若有以下程序段:int c1, c2=3, c3=2; c1=(float)c2/c3;则执行后,c1、c2的值分别是。 A)0,3.0 B) 1,3.0 C) 0,3 D) 1,3 5.下列变量定义中合法的是。 A)short_a=0xda; B)double b=1+5e2.5; C)int a=‘A’; D)float 2_and=1-e-3; 6.若变量已正确定义并赋值,符合C语言语法的表达式是。 A)++(a+1) B)a=7+b/c=a++ C)a=a+7=c+b D)a=’\0’ 7.设int a=1,b=2,c=3,m=4,n=5,p=3;,则执行表达式(a=m
17春北理工《自动控制理论I》在线作业
2017秋17春北理工《自动控制理论I》在线作业 一、单选题(共20 道试题,共60 分。) 1. 开环控制系统特征是没有()环节。 A. 给定 B. 放大 C. 反馈 D. 执行 正确答案: 2. 系统在作用下的稳态误差,说明( )。 A. 型别ν<2 B. 系统不稳定 C. 输入幅值过大 D. 闭环传递函数中有一个积分环节 正确答案: 3. 最小相位系统的开环增益越大,其()。 A. 振荡次数越多 B. 稳定裕量越大 C. 相位变化越小 D. 稳态误差越小 正确答案: 4. 开环频域性能指标中相角裕度对应时域性能指标( ) 。 A. 超调 B. 稳态误差 C. 调整时间 D. 峰值时间 正确答案: 5. 两个或多个环节具有同一输入信号,而以各自环节输出信号代数和作为系统总输出信号,这种结构成为()。 A. 串联 B. 并联 C. 开环 D. 闭环 正确答案: 6. 系统的数学模型是指()的表达式。 A. 输入信号 B. 输出信号
C. 系统动态特性 D. 系统的特征方程 正确答案: 7. 在信号流图中,支路上标明的是()。 A. 输入 B. 引出点 C. 比较点 D. 传递函数 正确答案: 8. 分析的性能指标,哪个指标是反映相对稳定性的()。 A. 上升时间 B. 峰值时间 C. 调整时间 D. 最大超调量 正确答案: 9. 二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为()。 A. 0.6 B. 0.707 C. 0 D. 1 正确答案: 10. 下列哪种措施对提高系统的稳定性没有效果( )。 A. 增加开环极点 B. 在积分环节外加单位负反馈 C. 增加开环零点 D. 引入串联超前校正装置 正确答案: 11. 已知单位反馈控制系统在阶跃函数作用下,稳态误差为常数,则此系统为()。 A. 0型系统 B. I型系统 C. II型系统 D. 高阶系统 正确答案: 12. 主导极点的特点是()。 A. 距离虚轴很近 B. 距离实轴很近 C. 距离虚轴很远 D. 距离实轴很远 正确答案: 13. 对于代表两个或两个以上输入信号进行()的元件又称比较器。 A. 微分 B. 相乘 C. 加减
北理工_自动控制理论matlab实验
MATLAB在自动控制理论中应用 实验报告 姓名: 班级: 学号:
一、实验目的 实验一 1. 掌握利用MATLAB建立控制系统模型的方法。 2. 掌握系统的各种模型表述及相互之间的转换关系。 3. 学习和掌握系统模型连接的等效变化。 实验二 1.学习和掌握利用MATLAB进行系统时域响应求解和仿真的方法。 2.考察二阶系统的时间响应,研究二阶系统参数对系统暂态特性的影响。 实验三 1.学习和掌握利用MATLAB绘制根轨迹图的方法 2.学习和掌握利用系统根轨迹图分析系统的性能。 实验四 1.学习和掌握利用MATLAB绘制系统Nyquist图和Bode图的方法。 2.学习和掌握利用系统的频率特性分析系统的性能。 一、实验原理 1)传递函数模型(TF) gtf=tf(num,den) 2)零极点增益模型(ZPK) Gzpk=zpk(z,p,k) 3)状态空间模型(SS) Gss=ss(a,b,c,d) 4)三种模型之间的转换 TF→ZPK: z pk(sys) TF→SS: ss(sys) ZPK→TF: t f(sys) ZPK→SS: s s(sys) SS→TF: tf(sys) SS→ZPK: z pk(sys) 5)绘制系统零极点图 Pzmap(gzpk); Grid on; 6)系统模型的串联 G(s)=G1(s)*G2(s)
7)系统模型的并联 G(s)=G1(s)+G2(s) 8)系统模型的反馈连接 T=feedback(G,H) T=feedback(G,H,sign) 9)绘制阶跃响应 step(sys) step(sys,T) 10)线性时不变系统仿真工具 ltiview 11)绘制系统根轨迹图 rlocus(sys) rlocus(sys,k) [r,k]=rlocus(sys) 12)计算鼠标选择点处根轨迹增益值和闭环极点值 [k,poles]=rlocfind(sys) 13)在连续系统根轨迹或零极点图上绘制出栅格线 sgrid(‘new’) sgrid(z,Wn) 14)绘制系统的Nyquist图 nyquist(SYS) nyquist(sys,w) 15)绘制系统的Bode图 bode(sys) bode(sys,w) 16)从频率响应数据中计算幅度裕度,相位裕度及对应角频率 margin(sys) [mag,phase]=bode(sys,w) 二、实验结果
北京理工大学汇编试题
一、数制转换,以下数为带符号数,表达成字节或字的形式:(10分) (-327)10 = ()2 (70b6)16=()10 (11010001)2 =()10 (0101010101011001)2=()10 ( 2572)10 =()16 二、指出划线部分的寻址方式,并计算其物理地址:(10分) 已知: (CS)=2100H, (DS)=2400H, (ES)=2800H, (SS)=2600H, (BX)=0600H, (DI)=0200H, (SI)= 0300H, (BP)=0400H, BUF=1000H 1、MOV CL ES:[1500H] ;寻址方式:物理地址: 2、CMP SI, [DI] ;寻址方式:物理地址: 3、ADD AX, BUF [BP] [SI] ;寻址方式:物理地址: 4、CALL WORD PTR CS:[SI] ;寻址方式:物理地址: 5、LEA DX, [BX+SI] ;寻址方式:物理地址: 三、已知一程序数据段如下,请在右边表格中填写该数据段数据存储的形式。(12 分,未初始化的单元填写“xx”) DATA SEGMENT Array C=50H BUFFER DB 'B',0BH, B_BYTE LABEL BYTE DATA1 DW 0FFAAH ORG $+1 DATA2 DW B_BYTE DATA3 DW C DATA4 DB 3 DUP(20H),0FFH DATA ENDS 四、写出下列程序段的运行结果,并逐条注释每条指令。
1. 该程序段执行后,BX= .,为什么?(用图表示)(9分)ADDR DW PROC0,PROC1,PROC2,PROC3,PROC4,PROC5,PROC6 DW PROC7,PROC8,PROC9 LEA SI,ADDR ADD SI,2 MOV BX,[SI] INC SI INC SI PUSH BX MOV AX,[SI] INC SI INC SI PUSH AX PUSH BP MOV BP,SP MOV DX,[BP+2] CALL [SI] … PROC1 PROC MOV BX,1 RET PROC1 ENDP PROC2 PROC MOV BX,2 RET PROC2 ENDP PROC3 PROC MOV BX,3 RET PROC3 ENDP 余此类推… (9分)2. 下面这段程序的功能是。
大学C期末考试题库
一、单选题: 1. 能作为C++程序的基本单位是( )。 A. 字符 B. 语句 C. 函数 D. 源程序文件 2. 程序中主函数的名字为( )。 A. main B. MAIN C. Main D. 任意标识符 3. 关于C++与C 语言的关系的描述中,( )是错误的。 A. C 语言是C++的一个子集; B. C 语言与C++是兼容的; C. C++对C 语言进行了一些改进; D. C++和C 语言都是面向对象的 4. 可用作C++语言用户标识符的一组标识符是( )。 A. void define +WORD B. a3_b3 _123 YN C. for -abc Case D. 2a DO sizeof 5. 存储以下数据,占用存储字节最多的是( )。 A. 0 B. ‘0’ C. “0” D. 0.0 6. 设int a=12;则执行完语句a+=a*a ;后,a 的值是( )。 A. 12 B. 144 C. 156 D. 288 7. 假设在程序中 a 、b 、c 均被定义成整型,所赋的值都大于1,则下列能正确表示代数式abc 1的表达式是( )。 A. 1.0/a*b*c B. 1/(a*b*c) C. 1/a/b/(float)c D. 1.0/a/b/c 8. 以下说法中正确的是( )。 A. C++程序总是从第一个定义的函数开始执行 B. C++程序总是从main 函数开始执行 C. C++函数必须有返回值,否则不能使用函数 D. C++程序中有调用关系的所有函数必须放在同一个程序文件中 9. 下面有关构造函数的描述中,正确的是( )。 A. 构造函数可以带有返回值 B. 构造函数的名字与类名完全相同 C. 构造函数必须带有参数 D. 构造函数必须定义,不能缺省 10.在声明类时,下面的说法正确的是( )。 A. 可以在类的声明中给数据成员赋初值 B. 数据成员的数据类型可以是register C. private ,public ,protected 可以按任意顺序出现 D. 没有用private ,public ,protected 定义的数据成员是公有成员 11.在下面有关析构函数特征的描述中,正确的是( )。 A. 一个类可以有多个析构函数 B. 析构函数与类名完全相同 C. 析构函数不能指定返回类型 D. 析构函数可以有一个或多个参数 12.构造函数是在( )时被执行的。 A. 程序编译 B. 创建对象 C. 创建类 D. 程序装入内存 13. 下面有关静态成员函数的描述中,正确的是( ) A. 在静态成员函数中可以使用this 指针 B. 在建立对象前,就可以为静态数据成员赋值 C. 静态成员函数在类外定义是,要用static 前缀 D. 静态成员函数只能在类外定义 14.下面有关友员函数的描述中,真确的说法是( ) A. 友员函数是独立于当前类的外部函数
北理工17春秋自动控制理论I在线作
一、单选题(共20道试题,共60分。)V1.开环控制系统特征是没有()环节。 A.给定 B.放大 C.反馈 D.执行 2.系统在作用下的稳态误差,说明()。 A.型别ν<2 B.系统不稳定 C.输入幅值过大 D.闭环传递函数中有一个积分环节 3.最小相位系统的开环增益越大,其()。 A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 4.开环频域性能指标中相角裕度对应时域性能指标()。 A.超调 B.稳态误差 C.调整时间 D.峰值时间 5.两个或多个环节具有同一输入信号,而以各自环节输出信号代数和作为系统总输出信号,这种结构成为()。 A.串联 B.并联 C.开环 D.闭环 6.系统的数学模型是指()的表达式。 A.输入信号 B.输出信号 C.系统动态特性 D.系统的特征方程 7.在信号流图中,支路上标明的是()。 A.输入 B.引出点 C.比较点 D.传递函数 8.分析的性能指标,哪个指标是反映相对稳定性的()。 A.上升时间 B.峰值时间 C.调整时间 D.最大超调量 9.二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为()。 A.0.6 B.0.707
C.0 D.1 10.下列哪种措施对提高系统的稳定性没有效果()。 A.增加开环极点 B.在积分环节外加单位负反馈 C.增加开环零点 D.引入串联超前校正装置 11.已知单位反馈控制系统在阶跃函数作用下,稳态误差为常数,则此系统为()。 A.0型系统 B.I型系统 C.II型系统 D.高阶系统 12.主导极点的特点是()。 A.距离虚轴很近 B.距离实轴很近 C.距离虚轴很远 D.距离实轴很远 13.对于代表两个或两个以上输入信号进行()的元件又称比较器。 A.微分 B.相乘 C.加减 D.相除 14.闭环控制系统通常对()进行直接或间接的测量,通过反馈影响控制信号。 A.输入量 B.输出量 C.扰动量 D.设定量 15.系统的频率特性() A.是频率的函数 B.与输入幅值有关 C.与输出有关 D.与时间t有关 16.系统稳定的充分必要条件是其特征方程式的所有根均在根平面的()。 A.右半部分 B.左半部分 C.实轴上 D.虚轴上 17.带动控制对象,直接改变被控变量的控制元件称为()。 A.放大元件 B.执行元件 C.测量元件 D.补偿元件 18.典型欠阻尼二阶系统,当开环增益K增加时,系统() A.阻尼比增大,超调量增大
自控实验三
东南大学能源与环境学院 实验报告 课程名称:自动控制基础 实验名称:闭环电压控制系统研究 院(系):能源与环境学院专业:热能与动力工程 姓名:周兴学号:03011127 实验室:418 实验组别:XX 同组人员:张亚丽实验时间:2013年10月30 日评定成绩:审阅教师:
目录 一.实验目的 (3) 二.实验设备 (3) 三.实验原理 (3) 四.实验线路图 (4) 五.实验步骤 (4) 六.报告要求 (5) 七.实验结果与分析 (5) 八.思考与回答 (11) 九.实验总结 (17)
一.实验目的 (1)通过实例展示,认识自动控制系统的组成、功能及自动控制原理课程所要解决的问题; (2)学会正确实现闭环负反馈; (3)通过开、闭环实验数据说明闭环控制效果。 二.实验设备 1. THBDC-1型控制理论·计算机控制技术实验平台; 2. PC机一台(含上位机软件)、数据采集卡、37针通信线1根、16芯数据排线、采接卡接口线。 三.实验原理 (1)利用各种实际物理装置(如电子装置、机械装置、化工装置等)数学上的“相似性”,将各种实际物理装置经过简化、并抽象成数学形式。我们在设计控制系统时,不必研究每一种实际装置,而用几种“等价”的数学形式来表达、研究和设计。又由于人本身的自然属性,人对纯数学而言,不能直接感受它的自然物理属性,这给我们分析和设计带来了困难。所以,我们又用替代、模拟、仿真的形式把纯数学形式再变成“模拟实物”来研究。这样,就可以“秀才不出门,遍知天下事”。实际上,在后面的课程里,不同专业的学生将面对不同的实际物理装置,而“模拟实物”的实验方式可以举一反三,我们就是用下列“模拟实物”——电路,也有实际物理装置——电机,替代各种实际物理装置。 (2)自动控制的根本是闭环,尽管有的系统不能直接感受到它的闭环形式,如步进电机控制,专家系统等,从大局看,还是闭环。闭环控制可以带来想象不到的好处,两个演示实例说明这一点。本实验就是用开环和闭环在负载扰动下的实验数据,说明闭环控制效果。自动控制系统性能的优劣,其原因之一就是取决调节器的结构和算法的设计(本课程主要用串联校正、极点配置),本实验为了简洁,采用单闭环、比例算法K。通过实验证明:不同的统K,对系性能产生不同的影响。说明正确设计调节器算法的重要性。 (3)为了使实验有代表性,本实验采用三阶(高阶)系统。这样,当调节器K值过大时,控制系统会产生典型的现象——振荡。本实验可以认为是真实
北京理工大学汇编实验二报告
北京理工大学汇编实验二报告
本科实验报告实验名称:算术运算类操作实验
一、实验要求和目的 1、了解汇编语言中的二进制、十六进制、十进制、BCD 码的表示形式; 2、掌握各类运算类指令对各状态标志位的影响及测试方法; 3、熟悉汇编语言二进制多字节加减法基本指令的使用方法; 4、熟悉无符号数和有符号数乘法和除法指令的使用; 5、掌握符号位扩展指令的使用。 6、掌握 BCD 码调整指令的使用方法 二、软硬件环境 1、硬件环境:计算机系统 windows; 2、软件环境:装有 MASM、DEBUG、LINK、等应用程序。 三、实验涉及的主要知识 1、加减法处理指令 主要有加法指令 ADD,带进位加法 ADC,减法指令 SUB,带进位减法指令 SBB。 2.乘除法指令和符号位扩展指令 主要有无符号数乘法指令MUL,带符号数乘
法指令IMUL,无符号数除法指令DIV,带符号数除法指令 IDIV,以及符号位从字节扩展到字的指令 CBW 和从字扩展到双字的指令 CWD。 3.BCD 码的调整指令 主要有非压缩的BCD 码加法调整指令DAA,压缩的 BCD 码减法调整指令 DAS,非压缩的 BCD 码加法调整指令 AAA,非压缩的 BCD 码减法调整指令 AAS,乘法的非压缩 BCD码调整指令 AAM,除法的非压缩 BCD 码调整指令 AAD。 8088/8086 指令系统提供了实现加、减、乘、除运算的上述基本指令,可对表 1 所示的数据类型进行数据运算。 表 1-2-1 数据类型数据运算表
四、实验内容与步骤 1、对于两组无符号数,087H 和 034H,0C2H 和5FH,试编程求这两组数的和差积商,并考虑计算结果对标志寄存器中状态标志位的影响:(1)实验流程 将一组 操作数 分别用 ADD,SUB,MUL,DIV 运算 (2)实验代码: DATAS SEGMENT BUF1 DB 087H BUF2 DB 034H BUF3 DB 4 DUP(?);此处输入数据段代码 DATAS ENDS
大学英语一期末考试题以与答案
大学英语(一) 行政班级分级班级学号 (请将答案写在答题卡上) PartⅠListening Comprehension (15%) 听力题(共 15题,每题1分,共15分) Directions: This part is to test your listening ability. It consists of 3 sections. Section A Directions:There are 5 recorded questions in it. After each question, there is a pause. The question will be spoken only once. 1. A. A testing system. B. A monitor system. C. A measuring system. D. A control system. 2. A. Car prices. B. Car services. C. The company’s business. D. The company’s culture. 3. A. It’s easy to do. B. It’s challenging. C. He can get a high pay. D. He did the same job before. 4. A. She’ll meet a friend. B. She’ll take a flight. C. She’ll attend an interview at 5:00. D. She’ll see a doctor before 5:00. 5. A. She will report the complaint to the manager. B. The manager refused to talk to the man. C. The manager was on a business trip. D. She will deal with the complaint. Section B Directions:There are 2 recorded dialogues in it. After each dialogue, there are some recorded questions. Both the conversations and questions will be spoken two times. Conversation 1
北理工微机实验四
北理工微机实验四
实验4 A/D和D/A转换 一、实验目的 1.了解A/D转换的基本原理,掌握ADC0809芯片的使用方法。 2.了解D/A转换的基本原理,掌握DAC0832芯片的使用方法。 3.了解直流电机控制的基本方法。 二、实验内容与步骤 (一)A/D转换部分 1. 接线:CS /0809 接 Y3 /IO地址 IN0 /0809 接0~5V /直流信号 EOC 接总线的IRQ 2. 实验电路原理图如图1.通过实验台左下角电位器RW1输出0 ~ 5V 直流电压送入 ADC0809通道0(IN0),利用 debug 的输出命令启动A/D 转换器,输入命令读取转换结果,验证输入电压与转换后数字的关系。 启动IN0开始转换:OUT 298H
读取转换结果:IN 298H 图1 模数转换电路 3. 用万用表测量 CLOCK、ADD-C、ADD-B、ADD-A 在实验系统上如何联系的? 4. 编程按中断方式采集IN0输入的电压,在屏幕上显示出转换后的数据(用16进制数)。 5. 考虑如果采用IN7输入的电压,启动开始转换和读取转换结果的地址应该是多少? 6. 按查询方式采集IN0输入的电压,软硬件如何实现? ● 编程提示 1. ADC0809的IN0口地址为298H.
2. IN0 单极性输入电压与转换后的数字的关系为: 其中,为输入电压,为参考电压,这里的参考电压为+5V电源。 3. 一次A/D 转换的程序可以为: MOV DX , port OUT DX , AL ;延时 IN AL , DX (二)D/A转换部分 1. 接线:CS /0832 接Y2 /IO 地址 用万用表测量WR2和XFER在实验系统上如何联系的? 2. 实验电路原理如图2所示: 图2 DAC0832电路原理图
北京理工大学汇编实验五实验报告概要
本科实验报告实验名称:子程序设计实验
实验五子程序设计实验(设计性实验) 一、实验要求和目的 1.熟悉汇编语言程序设计结构; 2.熟悉汇编语言子程序设计方法; 3.熟悉利用汇编语言子程序参数传递方法; 4.熟悉汇编语言字符串处理基本指令的使用方法; 5.掌握利用汇编语言实现字符串的输入输出程序设计方法; 6.掌握数制转换程序实现方法。 二、软硬件环境 1、硬件环境:计算机系统windows; 2、软件环境:装有MASM、DEBUG、LINK、等应用程序。 三、实验涉及的主要知识 A)子程序知识要点: 1、掌握子程序的定义语句;过 程名PROC [near/far] 过程 体 RET 过程名ENDP 2.子程序结构形式一个完整的子程序一般应包含下列内容: 1. )子程序的说明部分 在设计了程序时,要建立子程序的文档说明,使用户能清楚此子程序的功能和调用方法. 说明时,应含如下内容: .子程序名:命名时要名中见意. .子程序的功能:说明子程序完成的任务; .子程序入口参数:说明子程序运行所需参数及存放位置; .子程序出口参数:说明子程序运行结果的参数及存放位置; .子程序所占用的寄存器和工作单元; .子程序调用示例; 2、)掌握子程序的调用与返回在汇编语言中,子程序的调用用CALL,返回用RET指令 来完成。 .段内调用与返回:调用子程序指令与子程序同在一个段内。因此只修改IP; .段间调用与返回:调用子程序与子程序分别在不同的段,因此在返回时,需同时修改CS:IP。 3.)子程序的现场保护与恢复保护现场:在子程序设计时,CPU内部寄存器内容的
保护和恢复。 一般利用堆栈实现现场保护和恢复的格式:过程名PROC [NEAR/FAR] PUSH AX PUSH BX . . PUSH DX . . . POP DX . . . POP AX RET 过程名ENDP 4.子程序的参数传递方法 1.寄存器传递参数这种方式是最基本的参数传递方式。 2.存储器单元传(变量)递参数 这种方法是在主程序调用子程序前,将入口参数存放到约定的存储单元中;子程序运行时到约定存储位置读取参数;子程序执行结束后将结果也放在约定存储单元中。 3.用堆栈传递参数 利用共享堆栈区,来传递参数是重要的的方法之一。 B)字符、字符串输入输出知识要点: 在实际应用中,经常需要从键盘输入数据并将结果等内容显示到屏幕上,方便程序控制及查看结果。汇编语言的数据输入和输出分成两类,一是单个字符数据的输入输出,一是字符串数据的输入输出。都可以通过DOS功能调用来实现,下面就分别介绍下用来实现数据输入输出的功能调用的使用方法。 1、单个字符输入 单个字符输入可以利用DOS的1号功能调用来完成,使用方法为: MOV AH,1 INT 21H 这两条语句执行后,光标会在屏幕上闪烁,等待输入数据,输入的数据以ASCII 码形式存储在AL寄存器中。 2、单个字符输出 单个字符输出可利用DOS2号功能调用来完成,使用方法为: MOV DL,’?’ MOV AH,2