现代控制理论作业 一
一、 已知下列系统模型,试用MATLAB 将其转换成其它三种形式的模型:
1、
题中给出的是系统函数的多项式型函数,需将它转换成状态空间型、零
极点型和极点留数型。
(1) 多项式型转换到状态空间。
matlab 中提供的多项式到状态空间转换函数及其调用格式如下:
[A,B,C,D]=tf2ss(b,a)
所以转换程序为:
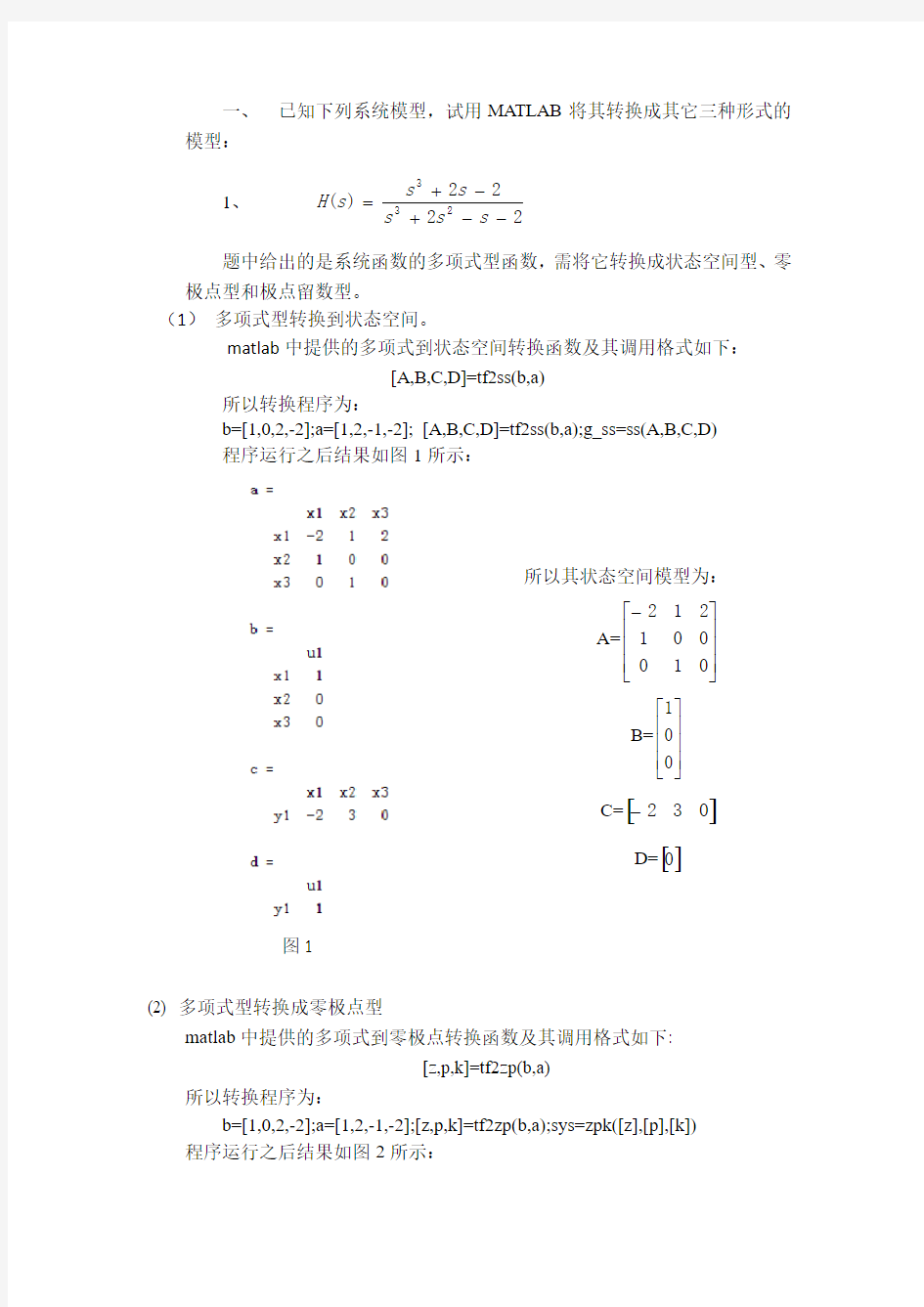
b=[1,0,2,-2];a=[1,2,-1,-2]; [A,B,C,D]=tf2ss(b,a);g_ss=ss(A,B,C,D) 程序运行之后结果如图1所示:
图1
所以其状态空间模型为:
A=????
??????-010001212 B=????
?
?????001 C=[]032-
D=[]
(2) 多项式型转换成零极点型
matlab 中提供的多项式到零极点转换函数及其调用格式如下:
[z,p,k]=tf2zp(b,a)
所以转换程序为:
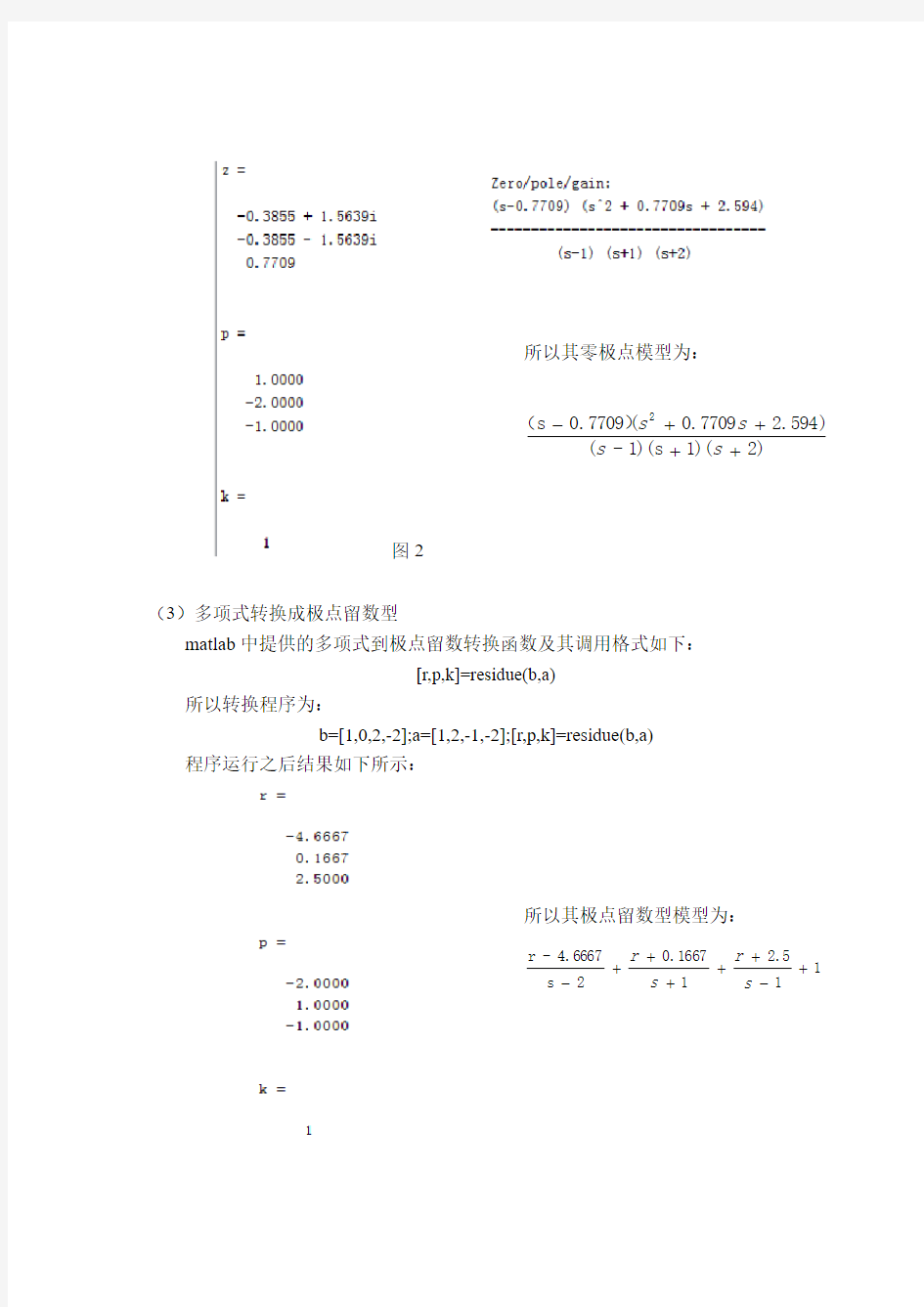
b=[1,0,2,-2];a=[1,2,-1,-2];[z,p,k]=tf2zp(b,a);sys=zpk([z],[p],[k]) 程序运行之后结果如图2所示:
2
22
2)(23
3--+-+=s s s s s s H
图2
所以其零极点模型为:
)
2)(1s )(1-()
594.27709.0()7709.0s (2++++-s s s s
(3)多项式转换成极点留数型
matlab 中提供的多项式到极点留数转换函数及其调用格式如下:
[r,p,k]=residue(b,a)
所以转换程序为:
b=[1,0,2,-2];a=[1,2,-1,-2];[r,p,k]=residue(b,a)
程序运行之后结果如下所示:
所以其极点留数型模型为:
1
1
5.21
1667.02
s 6667.4-r +-++
+++
-s r s r
2、??????--=6221A ,??
????-=23B ,[]21=C ,]0[=D
题中给出的是系统函数的状态空间模型,需将它转换成多项式型、零极
点型和极点留数型。
(1)状态空间转换成多项式型
matlab 中提供的状态空间到多下多项式转换函数及其调用格式如下:
[b,a]=ss2tf(A,B,C,D)
所以转换程序为:
A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D);sys=tf(b,a) 程序运行之后结果如下所示:
所以其多项式模型为
2
56
s 2
-+-s s :
(2)状态空间转换成零极点型:
matlab 中提供的状态空间到零极点型转换函数及其调用格式如下:
[z,p,k]=ss2zp(A,B,C,D)
所以转换程序为:
A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[z,p,k]=ss2zp(A,B,C,D); sys=zpk([z],[p],[k]) 程序运行之后结果如下所示:
(3)状态空间转换成极点留数型:
先将状态空间转换成多项式型,再将多项式型转换成极点留数型。第一步已经得出该系统的多项式型模型为:
2
56
s 2
-+-s s
,将它转换成
极点留数型程序为:
A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D); [r,p,k]=residue(b,a)
程序运行之后结果如下所示:
所以系统极点留数模型为:
3723.09797
.03723.5s 9797.1r +-+-+s r
3、
题中给出的是系统函数的零极点模型,需将它转换成多项式型、状态空间和
极点留数型。
(1) 零极点型转换成多项式型
matlab 中提供的零极点到多项式型转换函数及其调用格式如下:
[b,a]=zp2tf(z,p,k)
所以转换程序为:
z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);sys=tf(b,a)
程序运行之后得出多项式型模型如下所示:
(2) 零极点转换成状态空间
matlab 中提供的零极点到状态空间型转换函数及其调用格式如下:
[A,B,C,D]=zp2ss(z,p,k)
3
)1(2
)(+-=
s s s s H
所以转换程序为:
z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k);g_ss=ss(A,B,C,D) 程序运行之后结果如下所示:
所以其状态空间模型为:
A=????
?
?????01001-2-2-10001
0001- B=?????
?????0001 C=[]1000
D=[]
(3) 零极点转换成极点留数型
需先将零极点转换成多项式型,再将多项式型转换成极点留数型,转换程序如下:
z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);[r,p,k]=residue(b,a) 程序运行之后结果如下所示:r = 2.0000 2.0000 3.0000 -2.0000
p = -1.0000 -1.0000 -1.0000 0
k = []
所以系统极点留数型模型为:
s
s r s r s r H 2
r 1-31212)s (-+++-++-+=
二、状态方程的解
1、 设系统的微分方程为: (a) 写出系统的状态方程和输出方程。
(b) 若输入信号)(5)(f t t e t ε-=,初始状态1)0()0()0(321===x x x ,
试求状态变量)(),(),(321t x t x t x 和输出y(t)的零输入响应、零状态响应和全响应。
(a)首先将微分方程装换多项式型传递函数,再将其转换成成状态空间模型,转换程序如下:num=[4 10];den=[1 8 19 12];sys1=tf(num,den)
sys=ss(sys1)
程序运行后结果如下: a = x1 x2 x3 x1 -8 -4.75 -1.5 x2 4 0 0 x3 0 2 0
b = u1 x1 2 x2 0 x3 0
c = x1 x2 x3 y1 0 0.5 0.625
d = u1 y1 0
所以其状态方程为:f x x x ?????
?????+??????????---=??????????0020200045.175.48x 321 输出方程为:x y ]625.05.00[= (b)在MATLAB 环境下编写以下程序:
t=0:0.01:15;
A=[-8 -4.75 -1.5;4 0 0;0 2 0]; B=[2;0;0];C=[0 0.5 0.525];D=[0]; zi=[1 1 1]; %初始条件 f=5*exp(-t); sys=ss(A,B,C,D)
[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应
)
(10)(4)(12)(19)(8)(t f t f t y t y t y t y +'=+'+''+'''
f=5*exp(-t);
zi=[0 0 0]; %令初始条件为零
yzs=lsim(sys,f,t,zi); %计算零状态响应
figure(1)
plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'-..','linewidth',2)
legend('x(1)','x(2)','x(3)') %显示图例
title('状态变量波形')
xlabel('t(sec)')
figure(2)
plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2)
legend('y','yzi','yzs')
title('系统响应,零输入相应,零状态响应')
xlabel('t,(sec)')
程序运行后结果如下:
状态变量波形
t(sec)
图1 初始状态下状态变量波形
图2 输出y(t)的零输入响应、零状态响应和全响应曲线
2、设系统函数为
(a) 写出系统的状态方程和输出方程
(b) 若输入信号)(e 3)()(f
2t t t e t t εε-+-=,初始状态1)0(1=x 0)0(2=x ,1)0(3=x ,2)0(4=x 试求状态变量)(),(),(321t x t x t x ,)(4t x 和输
出y(t)的零输入响应、零状态响应和全响应。
(a)首先将零极点型换成状态空间模型,转换程序如下:
z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k)
程序运行后结果如下:
A = -1 0 0 0 1 0 0 0 1 -2 -2 -1 0 0 1 0
B = 1 0 0 0
C =
0 0 0 1 D = 0
00.511.522.5t,(sec)
系统响应,零输入相应,零状态响应
3
)1(2)(+-=
s s s s H
所以系统状态方程为:u x x x x ?
???????????+????????????----=??????????????00010100122100010001x 4321 输出方程为:[]x y 1000= (b)在MATLAB 环境下编写以下程序:
t=0:0.01:15;
A=[-1 0 0 0;1 0 0 0;1 -2 -2 -1;0 0 1 0]; B=[1;0;0;0];C=[0 0 0 1];D=[0]; zi=[1 0 1 2]; %初始条件 f=exp(-t)+3*exp(-2*t); sys=ss(A,B,C,D)
[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应 f=exp(-t)+3*exp(-2*t);
zi=[0 0 0 0]; %令初始条件为零 yzs=lsim(sys,f,t,zi); %计算零状态响应 figure(1)
plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'--',t,x(:,4),':','linewidth',2) legend('x(1)','x(2)','x(3)','x(4)') %显示图例 title('状态变量波形') xlabel('t(sec)') figure(2)
plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2) legend('y','yzi','yzs')
title('系统响应,零输入相应,零状态响应') xlabel('t,(sec)')
程序运行之后得出以下结果:
图3 初始状态下状态变量波形
图2 输出y(t)的零输入响应、零状态响应和全响应曲线
-8-6-4-2024t(sec)
状态变量波形
-8-6-4-2024t,(sec)
系统响应,零输入相应,零状态响应
现代控制理论习题解答..
《现代控制理论》第1章习题解答 1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为: x Ax Bu y Cx Du =+=+ 线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,而对线性时变系统,其系数矩阵A ,B ,C 和 D 中有时变的元素。线性定常系统在物理上代表结构和参数都不随时间变化的一类系统, 而线性时变系统的参数则随时间的变化而变化。 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下: 1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点? 答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。对于n 阶传递函数 121210 1110 ()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++, 分别有 ⑴ 能控标准型: []012 101 210100000100000101n n n x x u a a a a y b b b b x du ---????? ???????????? ???=+?? ???????? ? ?????----???? ? =+??
⑵ 能观标准型: []0011221100010 00 100010 1n n n b a b a x a x u b a b y x du ---?-?? ????? ??-????? ?????=-+???? ? ????? ??????-???? ?=+?? ⑶ 对角线标准型: []1212 001001001n n p p x x u p y c c c x du ????? ??????? ???=+?????? ????? ??????=+? 式中的12,, ,n p p p 和12,,,n c c c 可由下式给出, 12121012 1 11012 ()n n n n n n n n n b s b s b s b c c c G s d d s a s a s a s p s p s p ------++++=+=+++ +++++--- 能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。 能观标准型的特点:能控标准型的对偶形式。 对角线标准型的特点:状态矩阵是对角型矩阵。 1.4 对于同一个系统,状态变量的选择是否惟一? 答:对于同一个系统,状态变量的选择不是惟一的,状态变量的不同选择导致不同的状态空间模型。 1.5 单输入单输出系统的传递函数在什么情况下,其状态空间实现中的直接转移项D 不等 于零,其参数如何确定? 答: 当传递函数)(s G 的分母与分子的阶次相同时,其状态空间实现中的直接转移项D 不等于零。 转移项D 的确定:化简下述分母与分子阶次相同的传递函数 1110 111)(a s a s a s b s b s b s b s G n n n n n n n ++++++++=---- 可得: d a s a s a s c s c s c s G n n n n n ++++++++=----0 11 10 111)( 由此得到的d 就是状态空间实现中的直接转移项D 。 1.6 在例1. 2.2处理一般传递函数的状态空间实现过程中,采用了如图1.12的串联分解,试 问:若将图1.12中的两个环节前后调换,则对结果有何影响?
现代控制理论大作业
现代控制理论 (主汽温对象模型) 班级: 学号: 姓名:
目录 一. 背景及模型建立 1.火电厂主汽温研究背景及意义 2.主汽温对象的特性 3.主汽温对象的数学模型 二.分析 1.状态空间表达 2.化为约当标准型状态空间表达式并进行分析 3.系统状态空间表达式的求解 4.系统的能控性和能观性 5.系统的输入输出传递函数 6.分析系统的开环稳定性 7.闭环系统的极点配置 8.全维状态观测器的设计 9.带状态观测器的状态反馈控制系统的状态变量图 10.带状态观测器的闭环状态反馈控制系统的分析 三.结束语 1.主要内容 2.问题及分析 3.评价
一.背景及模型建立 1.火电厂主汽温研究背景及意义 火电厂锅炉主汽温控制决定着机组生产的经济性和安全性。由于锅炉的蒸汽容量非常大、过热汽管道很长,主汽温调节对象往往具有大惯性和大延迟,导致锅炉主汽温控制存在很多方面的问题,影响机组的整个工作效率。主汽温系统是表征锅炉特性的重要指标之一,主汽温的稳定对于机组的安全运行至关重要。其重要性主要表现在以下几个方面: (1) 汽温过高会加速锅炉受热面以及蒸汽管道金属的蠕变,缩短其使用寿命。例如,12CrMoV 钢在585℃环境下可保证其应用强度的时间约为10万小时,而在 595℃时,其保证应用强度的时间可能仅仅是 3 万小时。而且一旦受热面严重超温,管道材料的强度将会急剧下降,最终可能会导致爆管。再者,汽温过高也会严重影响汽轮机的汽缸、汽门、前几级喷嘴和叶片、高压缸前轴承等部件的机械强度,从而导致设备损坏或者使用年限缩短。 (2) 汽温过低,会使得机组循环热效率降低,增大煤耗。根据理论估计可知:过热汽温每降低10℃,会使得煤耗平均增加0.2%。同时,汽温降低还会造成汽轮机尾部的蒸汽湿度增大,其后果是,不仅汽轮机内部热效率降低,而且会加速汽轮机末几级叶片的侵蚀。此外,汽温过低会增大汽轮机所受的轴向推力,不利于汽轮机的安全运行。 (3) 汽温变化过大会使得管材及有关部件产生疲劳,此外还将引起汽轮机汽缸的转子与汽缸的胀差变化,甚至产生剧烈振动,危及机组安全运行。 据以上所述,工艺上对汽温控制系统的质量要求非常严格,一般控制误差范围在±5℃。主汽温太高会缩短管道的使用寿命,太低又会降低机组效率。所以必须实现汽温系统的良好控制。而汽温被控对象往往具有大惯性、大延时、非线性,时变一系列的特性,造成对象的复杂性,增加了控制的难度。现代控制系统中有很多关于主汽温的控制方案,本文我们着重研究带状态观测器的状态反馈控制对主汽温的控制[1] 。 2.主汽温对象的特性 2.1主汽温对象的静态特性 主汽温被控对象的静态特性是指汽温随锅炉负荷变化的静态关系。过热器的传热形式、结构和布置将直接影响过热器的静态特性。现代大容量锅炉多采用对流过热器、辐射过热器和屏式过热器。对流过热器布置在450℃~1000℃烟气温度的烟道中,受烟气的横向和纵向冲刷,烟气以对流方式将热量传给管道。而辐射过热器则是直接吸收火焰和高温烟气的辐射能。屏式过热器布置在炉膛内上部
现代控制理论1-8三习题库
信息工程学院现代控制理论课程习题清单
正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线性变换,线性定常系统状态方程的求解方法。 重点容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本性质,传递函数矩阵的定义。要求熟练掌握通过传递函数、微分方程和结构图建立电路、机电系统的状态空间表达式,并画出状态变量图,以及能控、能观、对角和约当标准型。难点:状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。 预习题 1.现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别? 2.状态、状态空间的概念? 3.状态方程规形式有何特点? 4.状态变量和状态矢量的定义? 5.怎样建立状态空间模型? 6.怎样从状态空间表达式求传递函数? 复习题 1.怎样写出SISO系统状态空间表达式对应的传递函数阵表达式 2.若已知系统的模拟结构图,如何建立其状态空间表达式? 3.求下列矩阵的特征矢量 ? ? ? ? ? ? ? ? ? ? - - = 2 5 10 2 2 1- 1 A 4.(判断)状态变量的选取具有非惟一性。 5.(判断)系统状态变量的个数不是惟一的,可任意选取。 6.(判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输 出关系的系统,表达为状态空间描述。 7.(判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定 常系统中应用,也可以在时变系统中应用. 8.如果矩阵A 有重特征值,并且独立特征向量的个数小于n ,则只能化为 模态阵。 9.动态系统的状态是一个可以确定该系统______(结构,行为)的信息集 合。这些信息对于确定系统______(过去,未来)的行为是充分且必要 的。 10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时, 则称这样的系统为______(线性定常,线性时变)系统。如果这些元素 中有些是时间t 的函数,则称系统为______(线性定常,线性时变)系 统。 11.线性变换不改变系统的______特征值,状态变量)。 12.线性变换不改变系统的______(状态空间,传递函数矩阵)。 13.若矩阵A 的n 个特征值互异,则可通过线性变换将其化为______(对 角阵,雅可比阵)。 14.状态变量是确定系统状态的______(最小,最大)一组变量。 15.以所选择的一组状态变量为坐标轴而构成的正交______(线性,非线性) 空间,称之为______(传递函数,状态空间)。
现代控制理论复习题库
一、选择题 1.下面关于建模和模型说法错误的是( C )。 A.无论是何种系统,其模型均可用来提示规律或因果关系。 B.建模实际上是通过数据、图表、数学表达式、程序、逻辑关系或各种方式的组合表示状态变量、输入变量、输出变量、参数之间的关系。 C.为设计控制器为目的建立模型只需要简练就可以了。 D.工程系统模型建模有两种途径,一是机理建模,二是系统辨识。 &&&&的类型是( B ) 。 2.系统()3()10() y t y t u t ++= A.集中参数、线性、动态系统。B.集中参数、非线性、动态系统。 C.非集中参数、线性、动态系统。D.集中参数、非线性、静态系统。 3.下面关于控制与控制系统说法错误的是( B )。 A.反馈闭环控制可以在一定程度上克服不确定性。 B.反馈闭环控制不可能克服系统参数摄动。 C.反馈闭环控制可在一定程度上克服外界扰动的影响。 D.控制系统在达到控制目的的同时,强调稳、快、准、鲁棒、资源少省。 x Pz说法错误的是( D )。 4.下面关于线性非奇异变换= A.非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。 B.对于线性定常系统,线性非奇异变换不改变系统的特征值。 C.对于线性定常系统,线性非奇异变换不改变系统的传递函数。 D.对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。 5.下面关于稳定线性系统的响应说法正确的是( A )。 A.线性系统的响应包含两部分,一部是零状态响应,一部分是零输入响应。 B.线性系统的零状态响应是稳态响应的一部分。 C.线性系统暂态响应是零输入响应的一部分。 D.离零点最近的极点在输出响应中所表征的运动模态权值越大。 6.下面关于连续线性时不变系统的能控性与能观性说法正确的是( A ) 。 A.能控且能观的状态空间描述一定对应着某些传递函数阵的最小实现。 B.能控性是指存在受限控制使系统由任意初态转移到零状态的能力。 C.能观性表征的是状态反映输出的能力。 D.对控制输入的确定性扰动影响线性系统的能控性,不影响能观性。 7.下面关于系统Lyapunov稳定性说法正确的是( C ) 。
现代控制理论基础试卷及答案
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: ) 一.填空题(共27分,每空分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T为周期进 行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为__________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义能量, V(x, t)称为___________。8." 9.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函数的所有 极点具有______。 10.控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的 _________、_________和较强的_________。 11.所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 12.实际的物理系统中,控制向量总是受到限制的,只能在r维控制空间中某一个控制域内取值,这个控制域称为_______。 13._________和_________是两个相并行的求解最优控制问题的重要方法。二.判断题(共20分,每空2分) 1.一个系统,状态变量的数目和选取都是惟一的。(×) 2.传递函数矩阵的描述与状态变量选择无关。(√) 3.状态方程是矩阵代数方程,输出方程是矩阵微分方程。(×) 4.对于任意的初始状态) ( t x和输入向量)(t u,系统状态方程的解存在并且惟一。(√) 5.( 6.传递函数矩阵也能描述系统方程中能控不能观测部分的特性。(×) 7.BIBO 稳定的系统是平衡状态渐近稳定。(×)
现代控制理论第一章答案1
习题解答 2-1 2-2 2-3 2-4 2-5 2-6 2-7 2-8 2-9 2-10 2-11 2-12 2-13 2-14 2-15 2-16 2-17 2-18
2-1 如题图2-1所示为RLC 电路网络,其中()i U t 为输入电压,安培表的指示电流)(t i o 为输出 量。试列写状态空间模型。 题图2-1 解: (1) 根据回路电压和节点电流关系,列出各电压和电流所满足的关系式. ()()() 1 ()()()()() i L C L C R C C d U t L i t U t dt d i t i t i t C U t U t dt R =+=+=+ (2) 在这个电路中,只要给定了储能R 元件电感L 和电容C 上的i L 和U C 的初始值,以及t ≥t 0 时刻后的输入量U i (t ),则电路中各部分的电压、电流在t ≥t 0时刻以后的值就完全确定了。也就是说,i L 和U C 可构成完整的描述系统行为的一组最少个数的变量组,因此可选i L 和为U C 状态变量,即 x 1(t )=i L , x 2(t )=u C (3) 将状态变量代入电压电流的关系式,有 1221211 11 i dx x U dt L L dx x x dt C RC =-+=- 经整理可得如下描述系统动态特性的一阶矩阵微分方程组--状态方程 11i 22110110x x L U L x x C RC ??-??????????=+???? ???? -???????????? (4) 列写描述输出变量与状态变量之间关系的输出方程, 1221110C x y U x x R R R ????===?? ?????? (5) 将上述状态方程和输出方程列写在一起,即为描述系统的状态空间模型的状态空间表达 式 11i 221211011010 x x L U L x x C RC x y x R ??-?????????? =+????????-? ??????????? ??? ?=????? ???
现代控制理论大作业 北科
现代控制理论大作业分析对象:汽车悬架系统 指导老师:周晓敏 专业:机械工程 姓名:白国星 学号:S2*******
1.建模 悬架是车轮或车桥与汽车承载部分之间具有弹性的连接装置的总称,具有传递载荷、缓和冲击、衰减振动以及调节汽车行驶中的车身位置等作用。传统汽车悬驾系统是被动悬驾,其参数不能改变,无法控制其对不同路面激励的响应,因此对不同路面的适应性较差。为提高汽车的行驶平顺性、操纵稳定性和制动性等性能,人们开始用主动悬架系统来代替传统的被动悬架系统。主动悬架系统能根据路面的情况通过一个动力装置改变悬挂架的参数,改善汽车的各方面性能。 对悬驾系统进行仿真计算首先要建立悬驾系统动力学模型,随后对所建立的模型进行仿真分析。为了简化模型,取汽车的一个车轮的悬驾系统进行研究,该模型可简化为一维二自由度的弹簧阻尼质量系统,图1所示为该模型的模拟图。 图1 悬架系统模型的模拟图 其中u为动力装置的作用力,w为路面位移,x1为车身位移,x2为悬驾位移,用车身位移来度量车身的振动情况,并视为系统的输出。路面状况以w为尺度,并视为系统的一个干扰输入。当汽车从平面落入坑时,w可用一个阶跃信
号来模拟。u 为主动悬架的作用力,它是系统的控制量。 进行受力分析,由牛顿第二规律可得车身悬架系统的动力学方程为: ()()()()() 1121212212122s s t m x K x x b x x u m x K x x b x x u K w x ?=-+-+?? =-+--+-??& &&&&&&& 设系统状态变量为: []1 2 12x x x x x =&& 则上面系统动力学方程可改写为状态空间表达式: x Ax Bu y Cx Du =+?? =+?& 其中: ()1 1 1 1222 200 100001s s s t s K K b b A m m m m K K K b b m m m m ????????--=????-+??-??? ? 12 200 001 01t B m K m m ?? ??????=????-???? []1000C = []00D = u u w ??=???? Matlab 系统模型程序代码: m1=800;m2=320;ks=10000;b=30000; kt=10*ks;
现代控制理论大作业
现代控制理论 直流电动机模型的分析 姓名:李志鑫 班级:测控1003 学号:201002030309
2 1直流电动机的介绍 1.1研究的意义 直流电机是现今工业上应用最广的电机之一,直流电机具有良好的调速特性、较大的启动转矩、功率大及响应快等优点。在伺服系统中应用的直流电机称为直流伺服电机,小功率的直流伺服电机往往应用在磁盘驱动器的驱动及打印机等计算机相关的设备中,大功率的伺服电机则往往应用在工业机器人系统和CNC铣床等大型工具上。[1] 1.2直流电动机的基本结构 直流电动机具有良好的启动、制动和调速特性,可以方便地在宽范围内实现无级调速,故多采用在对电动机的调速性能要求较高的生产设备中。 直流伺服电机的电枢控制:直流伺服电机一般包含3个组成部分: - 图1.1 ①磁极: 电机的定子部分,由磁极N—S级组成,可以是永久磁铁(此类称为永磁式直流伺服电机),也可以是绕在磁极上的激励线圈构成。 ②电枢: 电机的转子部分,为表面上绕有线圈的圆形铁芯,线圈与换向片焊接在一起。 ③电刷: 电机定子的一部分,当电枢转动时,电刷交替地与换向片接触在一起。 直流电动机的启动
电动机从静止状态过渡到稳速的过程叫启动过程。电机的启动性能有以下几点要求: 1)启动时电磁转矩要大,以利于克服启动时的阻转矩。 2)启动时电枢电流要尽可能的小。 3)电动机有较小的转动惯量和在加速过程中保持足够大的电磁转矩,以利于缩短启动时间。 直流电动机调速可以有: (1)改变电枢电源电压; (2)在电枢回路中串调节电阻; (3)改变磁通,即改变励磁回路的调节电阻Rf以改变励磁电流。 本文章所介绍的直流伺服电机,其中励磁电流保持常数,而有电枢电流进行控制。这种利用电枢电流对直流伺服电机的输出速度的控制称为直流伺服电机的电枢控制。如图1.2 Bm 电枢线路图1.2 ——定义为电枢电压(伏特)。 ——定义为电枢电流(安培)。 ——定义为电枢电阻(欧姆)。 ——定义为电枢电感(亨利)。 ——定义为反电动势(伏特)。 ——定义为励磁电流(安培)。 ——定义为电机产生的转矩(牛顿?米) ——定义为电机和反射到电机轴上的负载的等效粘带摩擦系数(牛顿?米∕度?秒) —定义为电机和反射到电机轴上的负载的等效转动惯量(千克?米)。 1.3建立数学模型 电机所产生的转矩,正比于电枢电流I与气隙磁通Φ的乘积,即: Φ (1-1) 而气隙磁通Φ又正比于激励电流,故式(1-1)改写为 (1-2)
现代控制理论大作业
现代控制理论大作业-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
分类号:TH89 单位代码:10110 学号: 中北大学 综合调研报告题目: 磁盘驱动器读写磁头的定位控制 系别: 计算机科学与控制工程学院 专业年级: 电气工程与智能控制2014级 姓名: 何雨贾晨凌朱雨薇贾凯张钊中袁航 学号: 14070541 39/03/04/16/33/47 指导教师: 靳鸿教授崔建峰讲师 2017年5月7日
摘要 硬盘驱动器作为当今信息时代不可缺少的存储设备,在人们日常生活中正扮演着越来越重要的角色,同时它也成为信息时代科学技术飞速发展的助推器。然而,随着信息量的日益增长,人们对硬盘驱动器存储容量的要求越来越高。但另一方面由于传统硬盘驱动器的低带宽、低定位精度,导致磁头很难准确地定位在目标磁道中心位置,从而限制了存储容量的持续增加。 自IBM公司于1956年向全球展示第一台磁盘存储系统R.AMAC以来,随着存储介质、磁头、电机及半导体芯片等相关技术的不断发展,硬盘的存储容量成倍增长、读写速度不断提高。要保证可靠的读写性能,盘片的转速控制和磁头的定位控制问题具有重要意义。其中磁头的定位控制主要包括寻道控制与定位跟踪控制两个问题,如PID控制、自适应控制、模态切换控制等,这些控制方法大大提高了硬盘磁头伺服系统的性能。为达到更高的精度,磁头双级驱动模型成近年的研究热点,多种控制策略已有相关报道,但目前仍处于实验水平。 关键词: 磁盘驱动器;磁头;定位;控制 Abstract Hard disk drive (HDD), acted as requisite storage equipment in current information age,plays a more and more vital role in people’s daily life, and it becomes a roll booster in rapid development of science and technology. However, with the increase of information capacity, we put forward a severe request for HDD data storage capacity. Unfortunately, due to the low bandwidth, low positioning accuracy in conventional HDD, magnetic head is hard to be positioned onto the destination track center, thus it limits the continuing increase in storage capacity. Since IBM brought the first disk-the random access memory accounting machine(RAMAC) to market in 1956, the storage capacity and read/write speed have continuously increased along with the development of the techniques of media,read/write head, actuators and semiconducting chips. The problems of R/W head's settling control is definitely important in order to ensure the reliability of read and write performance. Track seeking and track following are two main stages of the hard disk servo system. Researchers have developed kinds of control strategies to implement the servo control from PID control to advanced control methods.Dual-stage actuator has attracted many researchers and engineers for its broaderbandwidth compared with single-stage actuator. Key Words:Hard Disk Drive;Heads; Location; Control
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 1611166 13153 46 1 51 41 31 33 222 11+ - - =+-==+ + - - == =? ? ? ? ? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????????? ???????????=??????? ? ?????????? ????+?? ???????? ?????????????????????? ? ??? ? ???????? ?---- -=??????????????????????????????6543211654321111111126543 2100 0001 000000 00 0000 0001 00100000 000 000 10 x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图
现代控制理论
1、什么是对偶系统,从传递函数矩阵,特征多项式和能控、能观性说明互为对偶的两个系统之间的关系。 答:定义:如果两个系统满足A2=A1T,B2=C1T,C2=B1T,则称这两个系统互为对偶函数。互为对偶系统传递函数矩阵互为转置特征多项式相同,一个函数的能控性等价于另一个函数的能观性。 2、什么是状态观测器?简述构造状态观测器的原则。 答:系统的状态不易检测,以原系统的输入和输出为输入量构造,一动态系统,使其输出渐近于原系统状态,此动态系统为原系统的状态观测器。原则:(1)观测器应以原系统的输入和输出为输入量;(2)原系统完全能观或不能观于系统是渐近稳定的;(3)观测器的输出状态应以足够快速度超近于原系统状态;(4)有尽可能低的维数,以便于物理实现。 3、说明应用李氏第二法判断非线性系统稳定性基本思想和方法步骤和局限性。 答:基本思想:从能量观点分析平衡状态的稳定性。(1)如果系统受扰后,其运动总是伴随能量的减少,当达到平衡状态时,能量达到最小值,则此平衡状态渐近稳定:(2)如果系统不断从外界吸收能量,储能越来越大,那么这个平衡状态就是不稳定的:(3)如果系统的储能既不增加也不消耗,那么这个平衡状态时李亚普诺夫意义下的稳定。方法步骤:定义一个正定的标量函数V(x)作为虚构的广义能量函数,然后根据V(x)=dV(x)/dt的符号特征来判别系统的稳定性。局限性:李雅普诺夫函数V(x)的选取需要一定的经验和技巧。 4、举例说明系统状态稳定和输出稳定的关系。 答:关系:(1)状态稳定一定输出稳定,但输出稳定不一定状态稳定;(2)系统状态完全能观且能控=状态稳定与输出稳定等价。 举例: A的特征值 =-1 =1 所以状态不是渐进稳点的,W(s)的极点S=-1,所以输出稳点。 5、什么是实现问题?什么是最小实现?说明实现存在的条件。 答:(1)由系统的运动方程或传递函数建立SS表达式的问题叫做实现问题;(2)维数最小的实现方式时最小实现;(3)存在条件是m小于等于n。 6、从反馈属性、功能和工程实现说明状态反馈和输出反馈的优缺点。 答:(1)状态反馈为全属性反馈,输出反馈为部分信息反馈;(2)状态反馈在功能上优于输出反馈;(3)从工程上讲输出反馈优于状态反馈。 7、说明李氏第一法判断稳定性的基本思想和局限性。 答:(1)基本思想:将状态方程在平衡状态附近进行小偏差线性化,由系统矩阵的特征值判断系统稳定性。(2)局限性:对非线性系统,只能得出局部稳定性;系统虚轴上有特征值时不能判断稳定性。 8、简述线性时不变系统能控性定义,并说出两种判断能控性的方法。 答:(1)定义:如果存在一个分段连续的输入U(t),能在有限时间区间{t0,tf}内,使系统由某一初始化状态x(t0),转移到指定的任一终端状态x(tf),则此状态是能控的。若系统所有状态都是能控的,则完全能控,否则不完全能控。(2)方法:约旦标准型判据,秩判据。 9、说明系统传递函数零、极点对消与系统能控能观性关系。
现代控制理论大作业
现代控制理论大作业 一、位置控制系统----双电位器位置控制系统 由系统分析可知,系统的开环传递函数: 2233.3 s =s s 2*0.07s*s 205353G ()(+1)*(++1) 另:该系统改进后的传递函数: 223.331s =s s 2*0.07s*s 3455353G ( )(+1)*(++1) 1、时域数学模型 <1>稳定性 >> s=tf('s'); >> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sys Transfer function: 9.915e007 ----------------------------------------------------------- 53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007 >> pzmap(sys) 由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:
>> p=pole(sys) p = 0.0453 +45.2232i 0.0453 -45.2232i -13.7553 +26.9359i -13.7553 -26.9359i 系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态 <2>稳态误差分析 稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。改进后系统(G1)如下,求其特征方程的极点: >> s=tf('s'); >> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1)); >> sys2=feedback(G1,1); >>p=pole(sys2); p = 1.0e+002 * -3.4492 -0.0206 + 0.5258i -0.0206 - 0.5258i -0.0338 可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析: 由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。系统是电位器位置控制,信号的输入应该是一种瞬时变化,类似于系统的阶跃响应,所以查稳态误差与系统结构参数、输入信号特性之间关系一览表,可得系统G1的稳态误差为零。 <3>动态响应分析(主要是单位阶跃响应,其他响应一般是用于静态性能的测试) ①系统的单位阶跃响应: >> s=tf('s'); >> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)) >>sys=feedback(G,1); >> step(sys)
现代控制理论课后习题答案
绪论 为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。 根据老师要求,本次任务分组化,责任到个人。我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。2.题解详略得当,老师要求的步骤必须写上。3.遇到一题多解,要尽量写出多种方法。 本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!
这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。 本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正! 2014年6月2日 第一章 控制系统的状态空间表达式 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 解:由图,令32211,,x u x i x i c ===,输出量22x R y =
现代控制理论-大作业-倒立摆
现代控制理论-大作业-倒立 摆 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
摘要 倒立摆系统是一个复杂的、高度非线性的、不稳定的高阶系统,是学习和研究现代控制理论最合适的实验装置。倒立摆的控制是控制理论应用的一个典型范例,一个稳定的倒立摆系统对于证实状态空间理论的实用性是非常有用的。 本文主要研究的是二级倒立摆的极点配置方法,首先用Lagrange方程建立了二级倒立摆的数学模型,然后对二级倒立摆系统的稳定性进行了分析和研究,并给出了系统能控能观性的判别。基于现代控制理论中的极点配置理论,根据超调量和调整时间来配置极点,求出反馈矩阵并利用Simulink对其进行仿真,得到二级倒立摆的变化曲线,实现了对闭环系统的稳定控制。 关键词:二级倒立摆;极点配置;Simulink
目录 1.绪论 (1) 2 数学模型的建立和分析 (2) 2.1 数学建模的方法 (2) 2.2 二级倒立摆的结构和工作原理 (2) 2.3 拉格朗日运动方程 (3) 2.4推导建立数学模型 (4) 3 二级倒立摆系统性能分析 (10) 3.1 稳定性分析 (10) 3.2 能控性能观性分析 (11) 4 状态反馈极点配置 (12) 4.1 二级倒立摆的最优极点配置1 (12) 4.2 二级倒立摆最优极点配置2 (14) 5. 二级倒立摆matlab仿真 (16) 5.1 Simulink搭建开环系统 (16) 5.2 开环系统Simulink仿真结果 (16) 5.3 Simulink搭建极点配置后的闭环系统 (17) 5.4极点配置Simulink仿真结果 (18) 5.4.1 第一组极点配置仿真结果 (18) 5.4.2 第二组极点配置仿真结果 (20) 6.结论 (22) 7.参考文献 (23) 附录一 (24)
现代控制理论课程设计(大作业)
现代控制理论课 程设计报告 题目打印机皮带驱动系统能控能观和稳定性分析 项目成员史旭东童振梁沈晓楠 专业班级自动化112 指导教师何小其 分院信息分院 完成日期 2014-5-28
目录 1. 课程设计目的 (3) 2.课程设计题目描述和要求 (3) 3.课程设计报告内容 (4) 3.1 原理图 (4) 3.2 系统参数取值情况 (4) 3.3 打印机皮带驱动系统的状态空间方程 (5) 4. 系统分析 (7) 4.1 能控性分析 (7) 4.2 能观性分析 (8) 4.3 稳定性分析 (8) 5. 总结 (10)
项目组成员具体分工 打印机皮带驱动系统能控能观和稳定性 分析 课程设计的内容如下: 1.课程设计目的 综合运用自控现代理论分析皮带驱动系统的能控性、能观性以及稳定性,融会贯通并扩展有关方面的知识。加强大家对专业理论知识的理解和实际运用。培养学生熟练运用有关的仿真软件及分析,解决实际问题的能力,学会使用标准、手册、查阅有关技术资料。加强了大家的自学能力,为大家以后做毕业设计做很好的铺垫。 2.课程设计题目描述和要求 (1)环节项目名称:能控能观判据及稳定性判据 (2)环节目的: ①利用MATLAB分析线性定常系统的可控性和客观性。 ②利用MATLAB进行线性定常系统的李雅普诺夫稳定性判据。 (3)环节形式:课后上机仿真 (4)环节考核方式: 根据提交的仿真结果及分析报告确定成绩。 (5)环节内容、方法: ①给定系统状态空间方程,对系统进行可控性、可观性分析。 ②已知系统状态空间方程,判断其稳定性,并绘制出时间响应曲线验
证上述判断。 3.课程设计报告内容 3.1 原理图 在计算机外围设备中,常用的低价位喷墨式或针式打印机都配有皮带驱动器。它用于驱动打印头沿打印页面横向移动。图1给出了一个装有直流电机的皮带驱动式打印机的例子。其光传感器用来测定打印头的位置,皮带张力的变化用于调节皮带的实际弹性状态。 图1 打印机皮带驱动系统 3.2 系统参数取值情况 表1打印装置的参数
《现代控制理论》课后习题全部答案(最打印版)
第一章习题答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 阿 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为
[]????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ????????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 0000000100 10000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 L1L2 U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为:
现代控制理论复习题[1]
《现代控制理论》复习题1 一、(10分,每小题2分)试判断以下结论的正确性,若结论是正确的,则在其左边的括号 里打√,反之打×。 ( √ )1. 由一个状态空间模型可以确定惟一一个传递函数。 ( × )2. 若一个对象的连续时间状态空间模型是能控的,则其离散化状态空间模型也一定 是能控的。 ( × )3. 对一个给定的状态空间模型,若它是状态能控的,则也一定是输出能控的。 ( √ )4. 对系统Ax x =&,其Lyapunov 意义下的渐近稳定性和矩阵A 的特征值都具有负实部是一致的。 ( √ )5. 根据线性二次型最优控制问题设计的最优控制系统一定是渐近稳定的。 二、(15分)考虑由下式确定的系统: 2 33 )(2 +++= s s s s G 试求其状态空间实现的能控标准型、能观标准型和对角线标准型,并画出能控标准型的状态变量图。 解: 能控标准形为 []? ? ? ???=??????+??????? ?????--=??????21212113103210x x y u x x x x & & 能观测标准形为 []? ? ? ???=??????+??????? ?????--=??????21212110133120x x y u x x x x & & 对角标准形为 []? ? ? ???-=??????+????????????--=??????21212112112001x x y u x x x x && 三、(10分)在线性控制系统的分析和设计中,系统的状态转移矩阵起着很重要的作用。对系统 x x ?? ????--=3210 & 求其状态转移矩阵。 解:解法1。