三维点云数据处理的技术研究
三维点云数据处理的技术研究
中国供求网
【摘要】本文分析了大数据领域的现状、数据点云处理技术的方法,希望能够对数据的技术应用提供一些参考。
【关键词】大数据;云数据处理;应用
一、前言
随着计算机技术的发展,三维点云数据技术得到广泛的应用。但是,受到设备的影响,数据获得存在一些问题。
二、大数据领域现状
数据就像货币、黄金以及矿藏一样,已经成为一种新的资产类别,大数据战略也已上升为一种国家意志,大数据的运用与服务能力已成为国家综合国力的重要组成部分。当大数据纳入到很多国家的战略层面时,其对于业界发展的影响那是不言而喻的。国家层面上,发达国家已经启动了大数据布局。2012年3月,美国政府发布《大数据研究和发展倡议》,把应对大数据技术革命带来的机遇和挑战提高到国家战略层面,投资2亿美元发展大数据,用以强化国土安全、转变教育学习模式、加速科学和工程领域的创新速度和水平;2012年7月,日本提出以电子政府、电子医疗、防灾等为中心制定新ICT(信息通讯技术)战略,发布“新ICT计划”,重点关注大数据研究和应用;2013年1月,英国政府宣布将在对地观测、医疗卫生等大数据和节能计算技术方面投资1(89亿英镑。
同时,欧盟也启动“未来投资计划”,总投资3500亿欧元推动大数据等尖端技术领域创新。市场层面上,美通社发布的《大数据市场:2012至2018年全球形势、发展趋势、产业
分析、规模、份额和预测》报告指出,2012年全球大数据市场产值为63亿美元,预计2018年该产值将达483亿。国际企业巨头们纷纷嗅到了“大数据时代”的商机,传统数据分析企业天睿公司(Teradata)、赛仕软件(SAS)、海波龙(Hy-perion)、思爱普(SAP)等在大数据技术或市场方面都占有一席之地;谷歌(Google)、脸谱(Facebook)、亚马逊(Amazon)等大数据资源企业优势显现;IBM、甲骨文(Oracle)、微软(Microsoft)、英特尔(Intel)、EMC、SYBASE等企业陆续推出大数据产品和方案抢占市场,比如IBM公司就先后收购了SPSS、发布了IBMCognosExpress和InfoSphereBigInsights
数据分析平台,甲骨文公司的OracleNoSQL数据库,微软公司WindowsAzure
上的HDInsight大数据解决方案,EMC公司的
GreenplumUAP(UnifiedAnalyticsPlat-form)大数据引擎等等。
在中国,政府和科研机构均开始高度关注大数据。工信部发布的物联网“十二五”规划上,把信息处理技术作为四项关键技术创新工程之一提出,其中包括了海量数据存储、数据挖掘、图像视频智能分析,这都是大数据的重要组成部分,而另外三项:信息感知技术、信息传输技术、信息安全技术,也都与大数据密切相
关;2012年12月,国家发改委把数据分析软件开发和服务列入专项指南;2013年科技部将大数据列入973基础研究计划;2013年度国家自然基金指南中,管理学部、信息学部和数理学部都将大数据列入其中。2012年12月,广东省启了《广东省实施大数据战略工作方案》;北京成立“中关村大数据产业联盟”;此外,中国科学院、清华大学、复旦大学、北京航空航天大学、华东师范大学等相继成立了近十个从事数据科学研究的专门机构。中国互联网数据中心(IDC)对中国大数据技术和服务市场2012,2016年的预测与分析指出:该市场规模将会从2011年的7760万美元增长到2016年的6。17亿美元,未来5年的复合增长率达51(4%,市场规模增长近7倍。数据价值链和产业链初显端倪,阿里巴巴、百度、腾
讯、华为、大智慧等数据资源型和研发应用型企业初步涌现,并引领着数据产业的发展。2010年4月,淘宝推出“数据魔方”应用,开展基于淘宝网交易数据的分析和挖掘。2012年,华为公司推出了大数据解决方案和大数据存储产品。
大数据领域的研究最早集中于大数据处理技术的发展,随着数据量发展到PB、EB级甚至更大,客观上要求能够更快地处理分析。大数据专用计算机、分布式计算机集群、多类型多来源数据的处理和分析、数据网络等复杂结构数据的分析、秒级时间分析等通用技术以及各种面向领域的应用技术成为大数据发展的驱动力。
三、三维点云数据处理流程
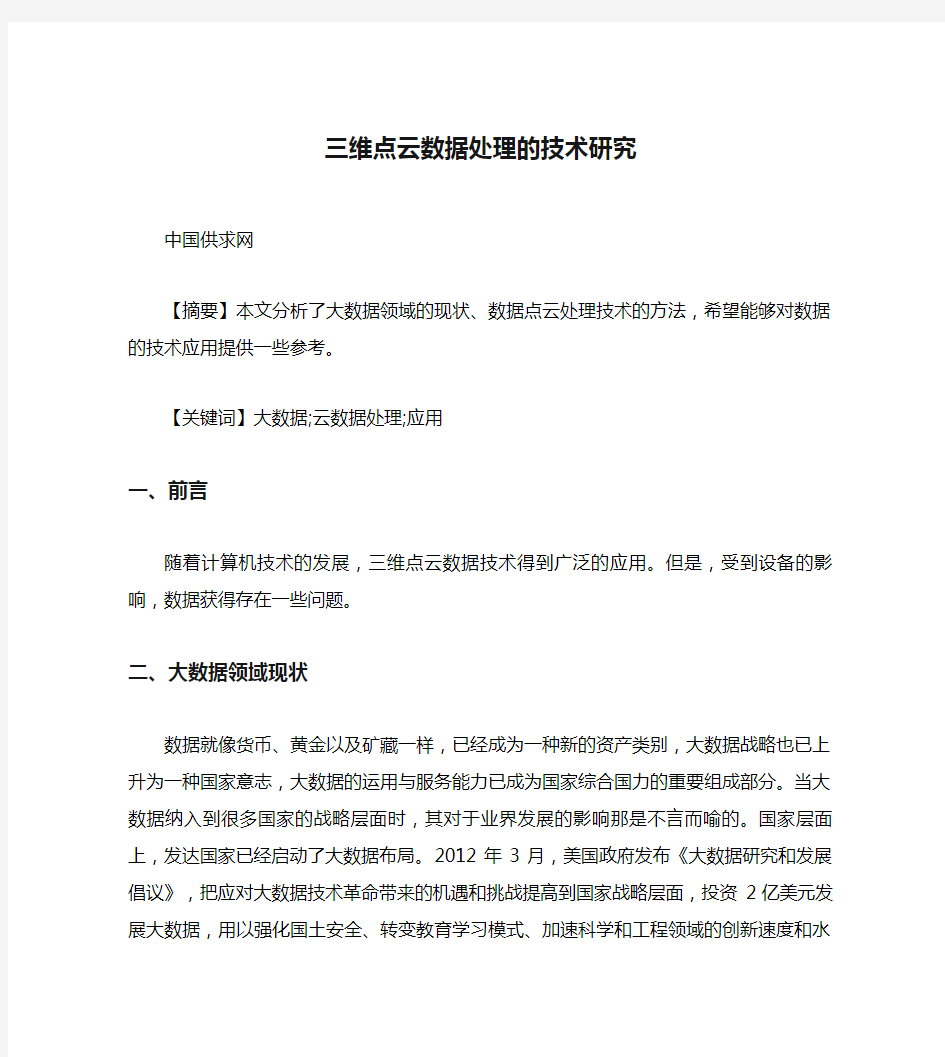
三维点云数据处理的关键技术主要包括冗余数据的删除、孤立点检测与滤除、数据平滑、点云数据精简、多视拼接、特征识别、区域分割、几何估算、模型重建等,处理流程图如图1所示。
图1点云数据处理流程图
图1只是点云数据处理的一般流程,针对不同的点云数据以及不同的需求可以选择性的调整相关的处理顺序或只选择其中的某些步骤进行数据处理。由图1可知三维点云数据的孤立点自动检测、数据平滑、多视拼接不仅是三维点云数据处理的关键技术,也是后续处理技术的的基础。
四、大型水轮机叶片的数据点云处理技术
由于实物几何和测量手段的制约,在数据测量时,会存在部分测量盲区和缺口,给后续的造型带来影响。“点云”是三维空间中的数据点的集合。因此,有必要对测量数据进行有效地处理,使得后续的模型重构方便可行。对于叶片的点云数据,在模型重构之前需要对其作一些列的前期处理,如数据平滑、可视化分析、数据分割等。测量数据处理技术是产品逆向建模的重要基础。下面结合大型水轮机叶片点云实际,说明点云数据处理技术。
图2白山1#机转轮叶片9#(宁波嘉?加工)型线精密检测
1、数据格式转换与补偿
目前,市场上应用的CAD/CAM软件类型较多,而且每一种CAD/CAM系统都有自己的数据文件格式,这给实现这些CAD/CAM软件之间的数据通信带来了许多不便。正由于市场上流行的CAD/CAM系统内部产品模型的数据结构和格式各不相同,影响了数据传输和程序衔接的自动化,也给三坐标测量机与CAD/CAM之间的数据通信带来困难。另外,在UG软件对大型水轮机叶片曲面进行重构之后,也要降UG软件的数据格式转换到MasterCAM软件中进行自动编程与后置处理。而且在逆向工程的数据处理中,有些数据扫描系统,特别是接触式扫描系统,扫描获得零件表面的坐标值并非接触点的坐标值,而是反映测头中心或顶部的值,为了描述零件表面上点的实际坐标值,必须对这些坐标值进行补偿转换。
2、噪声点剔除
在大型水轮机叶片曲面的实际测量过程中,由于各种人为或随机因素的影响,导致获得的原始数据点跟着产生噪声数据,即所谓的噪声点。根据经验和实践积累,这部分数据大约占数据总量的0.1%,5%。传统中使用的最简单的噪声剔除方法是人机交互,通过图形显示,判别明显坏点,在数据序列中将这些点剔除。还有一种去除噪声点的方法是角度判别法,以去除一些断点噪声。本文采用的UG软件进行大型水轮机叶片曲面的数据处理,采用的方法就是使用角度判别法进行自动断点探测。
3、多视数据整合对齐
多视数据整合对齐有两种方式:一种是事后的数据对齐处理;一种是通过专用的测量装置实现测量数据的直接对齐。通过长期的研究和实践,通常将事后的数据对齐处理分为数据的直接对齐(它是直接对数据点集进行操作实现数据对齐)和基于图形的对齐(基于图形的操作快捷、结果准确,多视数据整合对齐大多采用事后数据直接对齐)两种方法。
4、数据点精化
在大型水轮机叶片数据点精化的研究中,提出了各种处理方法。用均匀网格精化数据,选择图像处理过程中的中值滤波。
五、结束语
总之,随着信息技术的发展和进步,点云数据处理技术也将更加科学完善,数据获得也更加准确。
三维激光扫描分类及工作操作规范
三维激光扫描分类及工作 操作规范 Revised by Hanlin on 10 January 2021
一、地面激光扫描系统 1、概述 地面激光扫描仪系统类似于传统测量中的全站仪,它由一个激光扫描仪和一个内置或外置的数码相机,以及软件控制系统组成。二者的不同之处在于激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。这些点云数据可以直接用来进行三维建模,而数码相机的功能就是提供对应模型的纹理信息。 2、工作原理 三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算日标点P与扫描仪距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。三维激光扫描测量一般为仪器自定义坐标系。X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。获得P的坐标。进而转 换成绝对坐标系中的三维空间位置坐标或三维模型。 3、作业流程 整个系统由地面三维激光扫描仪、数码相机、后处理软件、电源以及附属设备构成,它采用非接触式高速激光测量方式,获取地形或者复杂物体的几何图形数据和影像数据。最终由后处理软件对采集的点云数据和影像数据进行处理转换成绝对坐标系中的空间位置坐标或模型,以多种不同的格式输出,满足空间信息数据库的数据源和不同应用的需要。(1)、数据获取 利用软件平台控制三维激光扫描仪对特定的实体和反射参照点进行扫描,尽可能多的获取实体相关信息。三维激光扫描仪最终获取的是空间实体的几何位置信息,点云的发射密度值,以及内置或外置相机获取的影像信息。这些原始数据一并存储在特定的工程文件
三维点云数据处理的技术研究
三维点云数据处理的技术研究 中国供求网 【摘要】本文分析了大数据领域的现状、数据点云处理技术的方法,希望能够对数据的技术应用提供一些参考。 【关键词】大数据;云数据处理;应用 一、前言 随着计算机技术的发展,三维点云数据技术得到广泛的应用。但是,受到设备的影响,数据获得存在一些问题。 二、大数据领域现状 数据就像货币、黄金以及矿藏一样,已经成为一种新的资产类别,大数据战略也已上升为一种国家意志,大数据的运用与服务能力已成为国家综合国力的重要组成部分。当大数据纳入到很多国家的战略层面时,其对于业界发展的影响那是不言而喻的。国家层面上,发达国家已经启动了大数据布局。2012年3月,美国政府发布《大数据研究和发展倡议》,把应对大数据技术革命带来的机遇和挑战提高到国家战略层面,投资2亿美元发展大数据,用以强化国土安全、转变教育学习模式、加速科学和工程领域的创新速度和水平;2012年7月,日本提出以电子政府、电子医疗、防灾等为中心制定新ICT(信息通讯技术)战略,发布“新ICT计划”,重点关注大数据研究和应用;2013年1月,英国政府宣布将在对地观测、医疗卫生等大数据和节能计算技术方面投资1(89亿英镑。 同时,欧盟也启动“未来投资计划”,总投资3500亿欧元推动大数据等尖端技术领域创新。市场层面上,美通社发布的《大数据市场:2012至2018年全球形势、发展趋势、产业
分析、规模、份额和预测》报告指出,2012年全球大数据市场产值为63亿美元,预计2018年该产值将达483亿。国际企业巨头们纷纷嗅到了“大数据时代”的商机,传统数据分析企业天睿公司(Teradata)、赛仕软件(SAS)、海波龙(Hy-perion)、思爱普(SAP)等在大数据技术或市场方面都占有一席之地;谷歌(Google)、脸谱(Facebook)、亚马逊(Amazon)等大数据资源企业优势显现;IBM、甲骨文(Oracle)、微软(Microsoft)、英特尔(Intel)、EMC、SYBASE等企业陆续推出大数据产品和方案抢占市场,比如IBM公司就先后收购了SPSS、发布了IBMCognosExpress和InfoSphereBigInsights 数据分析平台,甲骨文公司的OracleNoSQL数据库,微软公司WindowsAzure 上的HDInsight大数据解决方案,EMC公司的 GreenplumUAP(UnifiedAnalyticsPlat-form)大数据引擎等等。 在中国,政府和科研机构均开始高度关注大数据。工信部发布的物联网“十二五”规划上,把信息处理技术作为四项关键技术创新工程之一提出,其中包括了海量数据存储、数据挖掘、图像视频智能分析,这都是大数据的重要组成部分,而另外三项:信息感知技术、信息传输技术、信息安全技术,也都与大数据密切相 关;2012年12月,国家发改委把数据分析软件开发和服务列入专项指南;2013年科技部将大数据列入973基础研究计划;2013年度国家自然基金指南中,管理学部、信息学部和数理学部都将大数据列入其中。2012年12月,广东省启了《广东省实施大数据战略工作方案》;北京成立“中关村大数据产业联盟”;此外,中国科学院、清华大学、复旦大学、北京航空航天大学、华东师范大学等相继成立了近十个从事数据科学研究的专门机构。中国互联网数据中心(IDC)对中国大数据技术和服务市场2012,2016年的预测与分析指出:该市场规模将会从2011年的7760万美元增长到2016年的6。17亿美元,未来5年的复合增长率达51(4%,市场规模增长近7倍。数据价值链和产业链初显端倪,阿里巴巴、百度、腾
基于云计算物联网的大数据搜集处理技术审批稿
基于云计算物联网的大数据搜集处理技术 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
基于云计算物联网的大数据搜集处理技术 摘要: 随着云计算云储存物联网等新技术的应用,人们通过社交网络电子商务平台及移动智能终端等途径搜集,处理各种数据呈爆炸型增长,在容量关系和复杂性等方面已超出了传统的处理能力和认知范围。 在解析物联网两层基本涵义的基础上, 提出了包括底层网络分布、汇聚网关接入、互联网络融合、终端用户应用四部分的物联网系统架构;设计了由网络通信协议、网络控制平台、应用终端平台组成的面向物联网的网络协议体系, 并从硬件和软件两个层面讨论了实现物联网的关键技术;在分析当前物联网标准、技术、安全以及应用方面存在问题的基础上提出了未来物联网发展的六个重要理念。 大数据时代已经来临数据已经成为经济增长和,社会价值创造的源泉为人们提供无限机遇。然而我们也应该注意到快速发展的数据挖掘与利用技术使个人在网络空间从匿民变成透明。 关键词:云计算,物联网,大数据收集与处理 引言: 近年来,社交网络、电子商务、数字城市、在线视频等新一代大规模互联网应用发展迅猛。这些新兴的应用具有数据存储量大、业务增长速度快等特点。为了解决上述问题,2006 年Google、Amazon等公司提出了“云计算”的构想。根据美国国家标准与技术研究院(NIST)的定义,云计算是一种利用互联网实现随时随地、按需、便捷地访问共享资源池(如计设施、存储设备、应用程序等)的计算模式。到2018年互联网与经济社会各领域融合发展,进一步深
化,基于互联网的新业态成为新的经济增长动力,互联网支撑大众创业万众创新的作用进一步增强,网络经济与实体经济协同互动的发展格局基本形成。无处不在的物联网通信时代即将来临,世界上所有的物体,从轮胎到牙刷从房顶到纸巾都可以通过互联网进行信息交换。 物联网(Internet of Things , IoT)作为一种新兴网络技术和产业模式 , 在业界受到广泛关注.从国际电信联盟(ITU)在信息社会世界峰会上发布的《互联网报告2005 :物联网》中可以总结出物联网所体现的两层基本涵义:(1)目前的三大网络, 包括互联网(Internet)、电信网、广播电视网是物联网实现和发展的基础, 物联网是在三网基础上的延伸和扩展;(2)用户应用终端从人与人之间的信息交互与通信扩展到了人与物、物与物、物与人之间的沟通连接, 因此, 物联网技术能够使物体变得更加智能化.从目前的发展形势看, 最有可能率先获得智能连接功能的物体包括家居设备、电网设备、物流设备、医疗设备以及农业设备, 并基于此实现人类与自然环境的系统融合开创经济,新时代。专家指出,当前我国经济进入新常态,平稳度过新旧产业与核动能转化期需要强劲有力和恒久持续的支持力量。抢占经济制高点,促进大众创业,万众创新,提升公共服务水平必须走互联网融合创新之路。 一、云计算 1.云计算基础 云计算是并行计算(Parallel Computing)、分布式计算(Distributed Computing)、网格计算(Grid Computing)的发展,或者说是这些计算机科学概念的商业实现。云计算是虚拟化(Virtualization)、效用计算(Utility
云计算与大数据处理技术知识讲解
云计算与大数据处理技术 今天,随着IT规模越来越大,数据规模呈几何级数增长,已经超出了传统技术方法所能解决的范畴。为此,人们把目光转向了刚刚兴起的云计算,希望通过云计算来实施海量数据处理解决方案,实现以更小的成本来处理更大规模数据的目标,并成为目前云计算应用所面对的极大挑战。本课程基本思想如下:1,目前,“云计算”已经不是一个刚刚流行的时髦概念了,在一些传统IT 方法显得无能为力的场合,云计算正在开始大展拳脚,表现了强大的解决问题的能力,海量数据存储与处理正是属于这种场合。我们如何在云计算分布式环境下正确设计大数据量数据模型?如何在设计中解决资源、效率、安全性、可靠性等一系列极难平衡的问题?如何通过云计算帮助我们解决在传统IT技术中看似解决不了的敏感问题?这些都是我们在云计算架构设计中需要深入研究的键问题。 2,理解问题最好的方法是分析成功案例,本课程分别从多个角度分析在面对海量数据处理的困难时,不同的应用体系是如何解决问题并获得成功的。研究这些已有的体系不是目的,而是希望学员能够通过学习这些解决问题的方法和思路,通过归纳整理深入理解,再根据自己所面对的领域特征,形成解决具体实际问题的方案。这也是让云计算在海量数据处理领域真正发挥作用的有效途径。 3,云计算是一种服务,在云计算应用架构设计中,就必须考虑作为服务与普通的产品设计有哪些不同?需要考虑的产品的服务特征有哪些?如何搭建面向不同层次、合适的服务平台?在这个过程中,我们需要考虑哪些问题?有哪些成功的案例?有些什么解决方案?
4,云计算应用最重要的问题是安全问题。安全不是一个后期需要解决的独立问题,而是在前期就需要投入巨大精力来考虑的产品策略。可以说,安全性与可用性是云计算能否顺利实施与应用的关键点,也是云计算架构设计的关键因素。我们应该如何考虑安全问题?如何解决诸如数据安全、网络安全、主机安全、数据管理以及灾难恢复等一系列问题?如何制定合适的安全性与可用性策略?在 实践中有什么经验和教训? 5,为了把传统数据中心改造为基于云计算的服务系统,虚拟化是一个重要手段。我们必须深入研究虚拟化技术是如何实现的。虚拟化技术有哪几个层面的问题?如何正确应用虚拟化技术来实现把基础设施向服务转型?各种虚拟化技 术有些什么优点?有哪些陷阱?如何规划技术解决方案?如何正确进行云计算 体系结构设计? 本课程不是一个泛泛的理论性、概念性的介绍课程,而是针对问题讨论解决方案的深入课程。教师对于上述领域有深入的理论研究与实践经验,在课程中将会针对这些问题与学员一起进行研究,在关键点上还会搭建实验环境进行实践研究,以加深对于这些解决方案的理解。通过本课程学习,希望推动国内云计算项目开发上升到一个新水平。 云计算与大数据处理技术 第一讲云计算的概念与现状 1)云计算的概念 2)云计算发展现状 3)云计算实现机制 4)云计算的发展环境
数据处理点云处理
非接触三维扫描测量数据的处理研究 1 点云数据的处理 1.1 噪声点的剔除和失真点的查找.在非接触三维扫描测量过程中,受测量方式、被测量物体材料性质、外界干扰等因素的影响,不可避免地会产生误差很大的点(噪声点)和失真点(跳点).因此在数据处理的第一步,就应利用相关专用软件所提供的去噪声点功能除去那些误差大的噪声点和找出可能存在的失真点[3].失真点的查找需要一定的技巧和经验,下面介绍3种方法供大家参考:①直观检查法.通过图形显示终端,用肉眼直接将与截面数据点集偏离较大的点或存在于屏幕上的孤点剔除.这种方法适合于数据的初步检查,可从数据点集中筛选出一些比较大的异常点.②曲线检查法.通过截面的首末数据点,用最小二乘法拟合得到一条样条曲线,曲线的阶次可根据曲面截面的形状决定,通常为3~4阶,然后分别计算中间数据点pi到样条曲线的距离‖e‖,如果‖e‖大于等于[ε]([ε]为给定的允差),则认为pi是坏点,应予以剔除(见图1).③弦高差方法.连接检查点的前后2点,计算中间数据点pi到弦的距离‖e‖,如果‖e‖ [ε]([ε]为给定的允差),则认为pi是坏点,应予以剔除.这种方法适合于测量点均匀且较密集的场合,特别是在曲率变化较大的位置(见图2). 图1 曲线检查法剔除坏点 图2 弦高差方法 1.2 数据精简.非接触三维扫描测量的突出特点是点云十分密集,数据量极其庞大(在1m2的范围内有数十万个点).若将如此庞大的数据量直接用于曲面构建不仅需要巨大的计算机资源(普通微机可能无法胜任)和很长的计算时间,而且整个处理过程也将变得难以控制,更何况并非所有的测试数据对曲面的构建都有用.因此,有必要在保证一定精度的前提下,对测试数据进行精简.数据精简的原则是在扫描曲率较大的地方保持较多的数据点,在曲率变化较小的地方保持较少的数据点.不同类型的点云采用不同的精简方式.散乱点云可通过随机采样的方法来精简,而对于扫描线点云和多边形点云可采用等间距、倍率、等量及弦偏差等方法进行精减.此外均匀网格法与非均匀网格法也可用来精减点云数据.其中均匀网格法只需选取其中的某些点,无需改变点的位置,可以很好地保留原始数据,特别适合简单零件表面瑕点的快速剔除.由于均匀网格法没有考虑被测物体的表面形状特征,因此它不适合对形状复杂的重要工程部件测试数据的处理.与之相反,非均匀网格法可以根据被测工程部件外部形状特征的实际需要来确定网格的疏密,因此它可在保证后继曲面构建精度的前提下减少数据量,这在处理尺寸变化较大的自由形体方面显得十分有效. 1.3 数据的平滑处理.点云数据中的随机误差将影响到后续曲面的构建及生成三维实体模
三维激光扫描数据处理操作说明
三维激光扫描数据处理操作说明 中国地质大学三峡中心 钟成 2015年12月
1. 配置要求 扫描要求:密度高,扫描全面,站间重叠度高。 系统配置:XP系统,32位,有D盘盘符。 软件安装: ILIRS-3D软件包(绿色) polyworks_10_0_3_32bit.exe, chanzhuang.exe和配套库, Geomagic Studio10, TexCapture1.1。 Matlab 10.0 2. 数据预处理 2.1. 数据转换 2.1.1. 数据导入 打开ILIRS-3D软件包中Parser 5.0.1.4中Parser.exe,界面如图2.1.1: 图2.1.1 点击Add找到笔记本中存储扫描数据的文件夹:
出现以下界面: 图2.1.3 工具栏中放大缩小按钮可用于观察扫描范围。 2.1.2. 基本设置 然后点击setting对解压过程进行设置,出现如2.1.4界面。
图2.1.4 其中,Outputfile界面,主要设置输出路径和格式。默认路径在保存点云文件夹下,不用改。默认选择PIF格式,24-bit texture,也就是有颜色信息的点云,如果是8-bit scaled 则是点云强度信息。PIF格式是polyworks支持的格式。如果选择XYZ格式,则以ASCII码形式输出,也可以定义是否需要输出颜色信息。该格式可直接被Geomagic打开。 图2.1.5 2.1. 3. 颜色设置 然后,在最左边列表里选择Color Channel,出现如下界面:
选中, 默认的在会出现相应的照片信息,如果没有,则检查存储扫描数据的文件夹里是否有照片文件。 在里,默认是没有文件内容的,点击,到“ILIRS-3D”软件包,找到文件“10384 CameraCalParam.txt”即可。 2.1.4. 平移参数设置 然后在最左边列表里选择Pan tilt Transform,出现如下界面:
点云滤波方法
点云滤波方法-CAL-FENGHAI.-(YICAI)-Company One1
激光雷达点云数据滤波算法综述 滤波对象及目的:通过机载激光雷达快速获取高精度三维地理数据,对它所获取的点云数据的滤波过程就是将LIDAR点云数据中的地面点和非地面点分离的过程。 滤波方法:对数学形态学的滤波算法、基于坡度的滤波法、基于TIN的LIDAR点云过滤算法、基于伪扫描线的滤波算法、基于多分辨率方向预测的LIDAR点云滤波方法。 (一)LIDAR数据形态学滤波算法: (1)离散点云腐蚀处理。遍历LIDAR点云数据,以任意一点为中心开w×w大小的窗口,比较窗口内各点的高程,取窗口内最小高程值为腐蚀后的高程(2)离散点膨胀处理。再次遍历LIDAR点云数据,对经过腐蚀后的数据用同样大小的结构窗口做膨胀。即以任意一点为中心开w×w大小的窗口,此时,用腐 蚀后的高程值代替原始高程值,比较窗口内各点的高程,取窗口内最大高程值 为膨胀后的高程 (3)地面点提取。设Z p是p点的原始高程,t为阈值,在每点膨胀操作结束时,对该点是否是地面点作出判断。如果p点膨胀后的高程值和其原始高程值Z p 之差的绝对值小于或等于阈值t,则认为p点为地面点,否则为非地面点 该算法有两种滤波方式:一种是按离散点进行滤波,一种是按格网滤波。(1)按离散点滤波:是对每个激光点进行腐蚀和膨胀操作各一次,结构窗口内数据的选取按距离来量度。 (2)按格网滤波:指将每个格网看成一个“像素”,按照数字图像处理中取邻域的方法来开取结构窗口。腐蚀时,格网的“像素值”即为w×w邻域所包含格网的最小高程值;膨胀时,格网的“像素值”即为w×w邻域所包含格网的最大高程值。 优缺点:总体上,数学形态学算法存在的主要问题是坡度阈值的人工选取和细节地形的方块效应。如果阈值设定太大,可能保留一些低矮的地物目标,设定太小,则可能削平地形特征。现在各种阈值的选取一般根据研究者的经验设定,或者根据地形特征设定的,没有考虑全局的特征因素,不具有普适性。解决这些问题的方法是根据地形的起伏大小和高程变化自适应的进行滤波窗口调整。但此方法在大范围地区及地形变化强烈山区的有效性还有待进一步 研究。 实际应用:从应用上,Lindenberger将数字形态学方法引人到机载激光雷达数据滤波中,首先采用水平结构单元对机载激光测高数据进行开运算,过滤剖面式激光扫描数据,然后利用自回归过程改善了开运算结果。 (二)基于坡度变化的滤波算法 滤波基本思想:基于坡度变化的滤波算法是根据地形坡度变化确定最优滤波函数,对于给定的高差值,随着两点间距离的减小,高程值大的激光脚点属于地面点的可能性就越小。
大数据处理技术发展现状及其应用展望
. ,.. 大数据处理技术发展现状及其应用展望 一、定义 著名的管理咨询公司麦肯锡曾预测到:“数据,已经渗透到当今每一个行业和业务职能领域, 成为重要的生产因素。人们对于海量数据的挖掘和运用,预示着新一波生产率增长和消费者 盈余浪潮的到来。”这是大数据的最早定义。业界(于2012年,高德纳修改了对大数据的定义)将大数据的特征归纳为4个“V”(量Volume,多样Variety,价值Value,速Velocity),或者说特点有四个层面:第一,海量数据量。大数据计量单位至少是PB级别;第二,数据 类型繁多。比如,网络日志、视频、图片、地理位置信息等等都是囊括进来。第三,商业价 值高。第四,处理速度快。 在大数据时代,三分技术,七分数据,得数据者得天下。在大数据时代已经到来的时候要用 大数据思维去发掘大数据的潜在价值。Google利用人们的搜索记录挖掘数据二次利用价值, 比如预测某地流感爆发的趋势;Amazon利用用户的购买和浏览历史数据进行有针对性的书 籍购买推荐,以此有效提升销售量;Farecast利用过去十年所有的航线机票价格打折数据, 来预测用户购买机票的时机是否合适。 大数据分析相比于传统的数据仓库应用,具有数据量大、查询分析复杂等特点。对于“大数据”(Big data)研究机构Gartner给出了这样的定义。“大数据”是需要新处理模式才能具 有更强的决策力、洞察发现力和流程优化能力的海量、高增长率和多样化的信息资产。 二、大数据的技术 技术是大数据价值体现的手段和前进的基石。我将分别从云计算、分布式处理技术、存储技术和感知技术的发展来说明大数据从采集、处理、存储到形成结果的整个过程。 2.1、云技术 大数据常和云计算联系到一起,因为实时的大型数据集分析需要分布式处理框架来向数十、 数百或甚至数万的电脑分配工作。可以说,云计算充当了工业革命时期的发动机的角色,而大数据则是电。 云计算思想的起源是麦卡锡在上世纪60年代提出的:把计算能力作为一种像水和电一样的 公用事业提供给用户。如今,在Google、Amazon、Facebook等一批互联网企业引领下,一 种行之有效的模式出现了:云计算提供基础架构平台,大数据应用运行在这个平台上。 业内是这么形容两者的关系:没有大数据的信息积淀,则云计算的计算能力再强大,也难以找到用武之地;没有云计算的处理能力,则大数据的信息积淀再丰富,也终究只是镜花水月。 那么大数据到底需要哪些云计算技术呢?这里暂且列举一些,比如虚拟化技术,分布式处理技术,海量数据的存储和管理技术,NoSQL、实时流数据处理、智能分析技术(类似模式识
【WO2019216707A1】使用点云数据处理三维物体图像的方法和设备【专利】
( 1 (51)International Patent Classification:(81)Designated States(unless otherwise indicated,for every G06T15/10(2006.01)G06T15/08(2011.01)kind o f national protection av ailable).AE,AG,AL,AM, AO,AT,AU,AZ,BA,BB,BG,BH,BN,BR,BW,BY,BZ, (21)International Application Number: CA,CH,CL,CN,CO,CR,CU,CZ,DE,DJ,DK,DM,DO, PCT/KR2019/005655 DZ,EC,EE,EG,ES,FI,GB,GD,GE,GH,GM,GT,HN, (22)International Filing Date:HR,HU,ID,IL,IN,IR,IS,JO,JP,KE,KG,KH,KN,KP, 10May2019(10.05.2019)KR,KW,KZ,LA,LC,LK,LR,LS,LU,LY,MA,MD,ME, MG,MK,MN,MW,MX,MY,MZ,NA,NG,NI,NO,NZ, (25)Filing Language:English OM,PA,PE,PG,PH,PL,PT,QA,RO,RS,RU,RW, SA, (26)Publication Language:English SC,SD,SE,SG,SK,SL,SM,ST,SV,SY,TH,TJ,TM,TN, TR,TT,TZ,UA,UG,US,UZ,VC,VN,ZA,ZM,ZW. (30)Priority Data: 20184101767910May2018(10.05.2018)IN(84)Designated States(unless otherwise indicated,for every 20184101767930April2019(30.04.2019)IN kind o f regional protection available).ARIPO(BW,GH, GM,KE,LR,LS,MW,MZ,NA,RW,SD,SL,ST,SZ,TZ, (71)Applicant:SAMSUNG ELECTRONICS CO.,LTD.UG,ZM,ZW),Eurasian(AM,AZ,BY,KG,KZ,RU,TJ, [KR/KR];129,Samsung-ro,Yeongtong-Gu,Suwon-Si,TM),European(AL,AT,BE,BG,CH,CY,CZ,DE,DK, Gyeonggi-do16677(KR).EE,ES,FI,FR,GB,GR,HR,HU,IE,IS,IT,LT,LU,LV, (72)Inventors:VELAPPAN,Raghavan;A204,Rajini Ashish MC,MK,MT,NL,NO,PL,PT,RO,RS,SE,SI,SK,SM, Apartments,Tuberahalli,Varthur Road,Bangalore,Kar?TR),OAPI(BF,BJ,CF,CG,Cl,CM,GA,GN,GQ,GW, nataka,560066(IN).VETTUKUZHYPARAMBHIL,KM,ML,MR,NE,SN,TD,TG). Suresh Kumar KrishnanKutty;VettuKuzhiParambhil, Kottamuri P O,Throkkodithanam Changanacherry,Kerala,Published: 686105(IN).DUSI,Pavan Kumar;202,Shivaganga Com?—with international search report(Art.21(3)) plex,Kaggadasapura Main road,Bangalore,Karnataka, 560065(IN).HOLLA,Raghavendra;28/180,15th Main Road,J C Nagar,Bengalur,Karnataka,560086(IN).YA- DAV,Amit;Flat002,Pragathi Corel,K.G.F.Munireddy Layout,B Narayanapura,Mahadevapura,Bangalore,Kar? nataka,560048(IN).DAS,Nachiketa;F6,Chennu homes, 1st cross,Kaggadasapura main road,Bangalore,Karnata? ka,560093(IN).CHUCHRA,Divyanshu;A-302,Nagar- juna Greenwoods Apts,Kadubeesnahalli,Outer Ring Road, Bangalore,Karnataka,560103(IN). (74)Agent:Y.P.LEE,MOCK&PARTNERS;12F Daelim Acrotel,13Eonju-ro30-gil,Gangnam-Gu,Seoul06292 (KR). (54)Title:METHOD AND APPARATUS FOR PROCESSING THREE DIMENSIONAL OBJECT IMAGE USING POINT CLOUD DATA (57)Abstract:An apparatus and method are provided for compressing a three-dimensional(3D)object image represented by point cloud data.The method includes positioning the3D object image into a plurality of equi-sized cubes for compression;determining3D local coordinates in each of the plurality of equi-sized cubes and a cube index for each point of the3D object image positioned in the plurality of equi-sized cubes;generating two-dimensional(2D)image data based on the3D local coordinates and the cube indexes;and storing the2D image data in a memory.The2D image data includes at least one of2D geometry data,2D meta data,or2D color data.
点云数据处理
点云数据处理 ICP点云配准就是我们非常熟悉的点云处理算法之一。实际上点云数据在形状检测和分类、立体视觉、运动恢复结构、多视图重建中都有广泛的使用。点云的存储、压缩、渲染等问题也是研究的热点。随着点云采集设备的普及、双目立体视觉技术、VR和AR的发展,点云数据处理技术正成为最有前景的技术之一。PCL是三维点云数据处理领域必备的工具和基本技能,这篇博客也将粗略介绍。 三维点云数据处理方法 1. 点云滤波(数据预处理) 1. 点云滤波(数据预处理) 点云滤波,顾名思义,就是滤掉噪声。原始采集的点云数据往往包含大量散列点、孤立点,比如下图为滤波前后的点云效果对比。 点云滤波的主要方法有:双边滤波、高斯滤波、条件滤波、直通滤波、随机采样一致滤波、VoxelGrid滤波等,这些算法都被封装在了PCL点云库中。 2. 点云关键点 我们都知道在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提取算法,这种特征点的思想可以推广到三维空间。从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理了速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。
常见的三维点云关键点提取算法有一下几种:ISS3D、Harris3D、NARF、SIFT3D 这些算法在PCL库中都有实现,其中NARF算法是博主见过用的比较多的。 3. 特征和特征描述 如果要对一个三维点云进行描述,光有点云的位置是不够的,常常需要计算一些额外的参数,比如法线方向、曲率、文理特征等等。如同图像的特征一样,我们需要使用类似的方式来描述三维点云的特征。 常用的特征描述算法有:法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。 PFH:点特征直方图描述子,FPFH:跨苏点特征直方图描述子,FPFH是PFH的简化形式。这里不提供具体描述了,具体细节去谷歌吧。 4. 点云配准 点云配准的概念也可以类比于二维图像中的配准,只不过二维图像配准获取得到的是x,y,alpha,beta等放射变化参数,二三维点云配准可以模拟三维点云的移动和对其,也就是会获得一个旋转矩阵和一个平移向量,通常表达为一个4×3的矩阵,其中3×3是旋转矩阵,1*3是平移向量。严格说来是6个参数,因为旋转矩阵也可以通过罗格里德斯变换转变成1*3的旋转向量。 常用的点云配准算法有两种:正太分布变换和著名的ICP点云配准,此外还有许多其它算法,列举如下: ICP:稳健ICP、point to plane ICP、point to line ICP、MBICP、GICP NDT 3D、Multil-Layer NDT
三维激光扫描仪点云数据处理与建模
三维激光扫描仪点云数据处理与建模点云的预处理由于三维激光扫描仪在扫描过程中,外界环境因素对扫描目标的阻挡和遮掩,如移动的车辆、行人树木的遮挡,及实体本身的反射特性不均匀,需要对点云经行过滤,剔除点云数据内含有的不稳定点和错误点。实际操作中,需要选择合适的过滤算法来配合这一过程自动完成。 点云配准使用控制点配准,将点云配准到控制网坐标系下;靶标缺失的点云,利用公共区域寻找同名点对其进行两两配准,当同名点对不能找到时,利用人工配准法。后两种方法均为两两配准,为了将所有点云转换到统一的控制网坐标系下与控制点配准法得到点云配在一起,两两配准时要求其中一站必须为已经配到控制网坐标系下的点云。 点云拼接外业采集的数据导入至软件时会根据坐标点自动拼接,但由于人为操作和角架的误差,一些点云接合处不太理想,这时需要进行手动拼接,对一些无坐标补扫面的拼接也需手动处理。手动拼接时对点云应适当压缩,选择突出、尖角、不同平面的特征点,以降低操作误差。如采用1cm激光间隔扫描时拼接后的误差在3mm以下较为理想。 建立三维模型当建筑物数字化为大量离散的空间点云数据后,在此基础上来构造建筑物的三维模型。
点云的漏洞修复由于点云本身的离散性,会导致模型存在一定缺陷,需要在多边形阶段对其进行修补、调整等操作后,才能得到准确的实物数字模型。由于建筑物形状复杂多样,所以目前网格的修补难以实现全自动化。三维激光扫描仪点云数据的漏洞修复主要采用两种方法:当空洞出现在平面区域内,比如窗户或者墙面上的洞,可采用线性插值的方法填补空洞数据;当空洞出现在非平面区域,如圆柱上出现的漏洞,可采取二次曲面插值方法。
“云计算与海量数据处理技术”公开课
“云计算与海量数据处理技术”公开课 中国科学院计算技术研究所是国家专门的计算技术研究机构,同时也是中国信息化建设的重要支撑单位,中科院计算所培训中心是致力于高端IT类人才培养及企业内训的专业培训机构。中心凭借科学院的强大师资力量,在总结多年大型软件开发和组织经验的基础上,自主研发出一整套课程体系,其目的是希望能够切实帮助中国软件企业培养高级软件技术人才,提升整体研发能力,迄今为止已先后为国家培养了数万名计算机专业人员,并先后为数千家大型国内外企业进行过专门的定制培训服务。 云计算提供了一种对资源“按需索取服务”的能力,确保了使用时间与需要时间的完全一致,从而建立了一种分布式、高效率、低成本的IT商业模式。正是这些特点,使云计算成为IT发展的潮流与趋势。为解决广大系统设计人员深入研究与开发云计算系统的需要,培训中心特举办“云计算与海量数据处理技术”培训班,具体事宜通知如下: 一、培训对象 1,系统架构师、系统分析师、高级程序员、资深开发人员。 2,牵涉到海量数据处理的机构数据中心运行、规划、设计负责人。 3,云服务运营服务提供商规划负责人。 4,高校、科研院所牵涉到大数据与分布式数据处理的项目负责人。 二、学员基础 1,对IT系统设计有一定的理论与实践经验。 2,数据仓库与大数据处理有一定的基础知识。 三、师资 由业界知名云计算专家亲自授课: 杨老师主要研究网络信息分析以及云计算相关技术,长期从事通信网管系统、网络信息处理、商务智能(BI)以及电信决策支持系统的研究开发工作,主持和参与了多个国家和省部级基金项目,具有丰富的工程实践及软件研发经验。 李老师国内知名企业云平台技术负责人,中国云亲身实践者。 四、培训要点
大数据及其智能处理技术
云计算环境下大数据及其智能处理技术 1、什么是大数据 “大数据”“是一个体量特别大,数据类别特别大的数据集,并且这样的数据集无法用传统数据库工具对其内容进行抓取、管理和处理。“大数据”首先是指数据体量(volumes) 大,指代大型数据集,一般在10TB 规模左右,但在实际应用中,很多企业用户把多个数据集放在一起,已经形成了PB级的数据量;其次是指数据类别(variety)大,数据来自多种数据源,数据种类和格式日渐丰富,已冲破了以前所限定的结构化数据范畴,囊括了半结构化和非结构化数据。 IBM将大数据归纳未三个标准,即3V:类型(variety)、数量(volume)和速度(velocity)。其中类型(variety)指数据中有结构化、半结构化和非结构化等多种数据形式;数量(volume)指收集和分析的数据量非常大;速度(velocity)指数据处理速度要足够快。 大数据对于悲观者而言,意味着数据存储世界的末日,对乐观者而言,这里孕育了巨大的市场机会,庞大的数据就是一个信息金矿,随着技术的进步,其财富价值将很快被我们发现,而且越来越容易。大数据本身是一个现象而不是一种技术,伴随着大数据的采集、传输、处理和应用的相关技术就是大数据处理技术,是系列使用非传统的工具来对大量的结构化、半结构化和非结构化数据进行处理,从而获得分析和预测结果的一系列数据处理技术。 2、“大数据”的缘由 根据IDC作出的估测,数据一直都在以每年50%的速度增长,也就是说每两年就增长一倍(大数据摩尔定律),这意味着人类在最近两年产生的数据量相当于之前产生的全部数据量,预计到2020年,全球将总共拥有35亿GB的数据量,相较于2010年,数据量将增长近30倍。这不是简单的数据增多的问题,而是全新的问题。举例来说,在当今全球范围内的工业设备、汽车、电子仪表和装运箱中,都有着无数的数字传感器,这些传感器能测量和交流位置、运动、震动、温