履带式机器人运动学分析
履带式机器人运动学分析
彭春江;武利生;李元宗
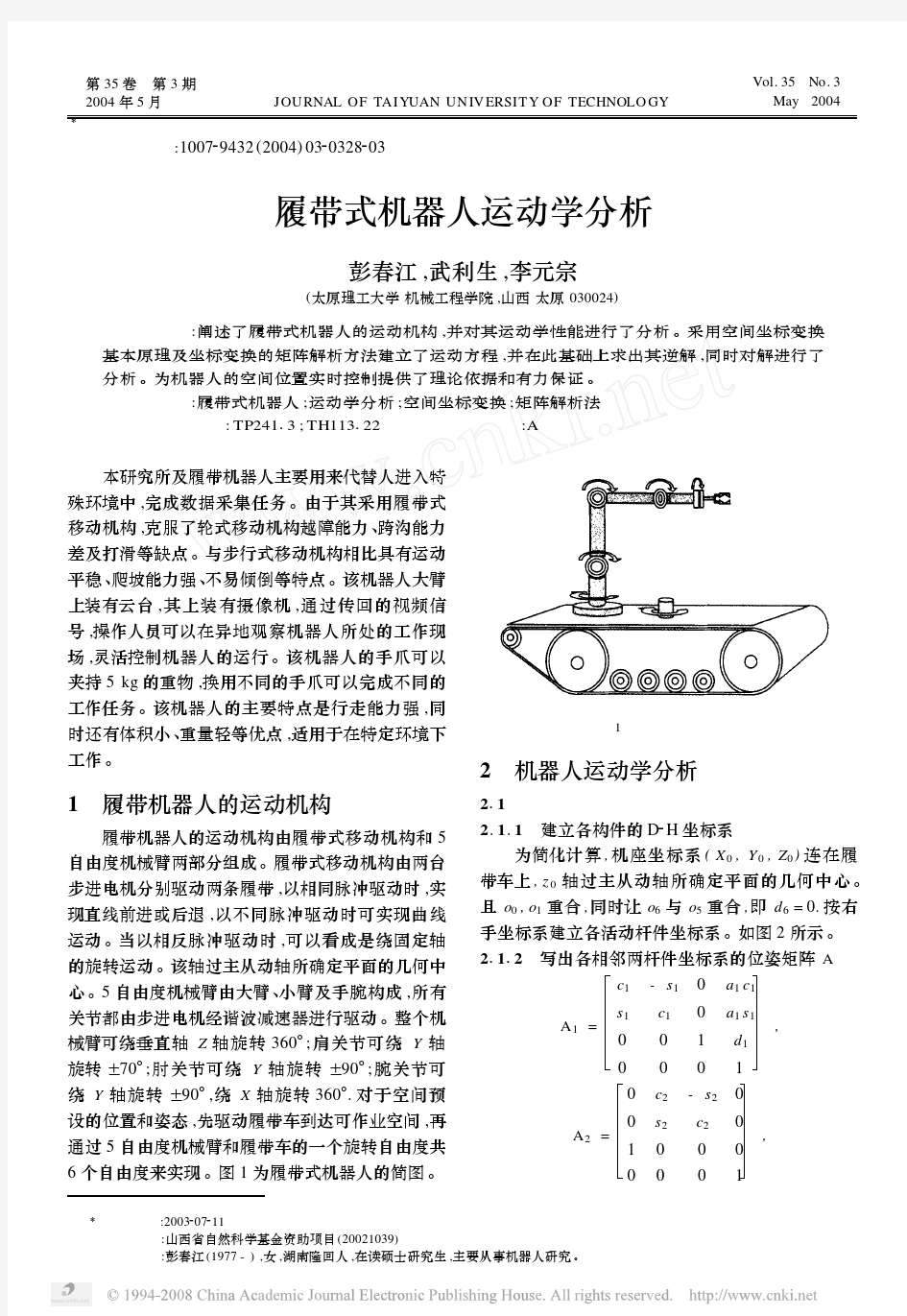
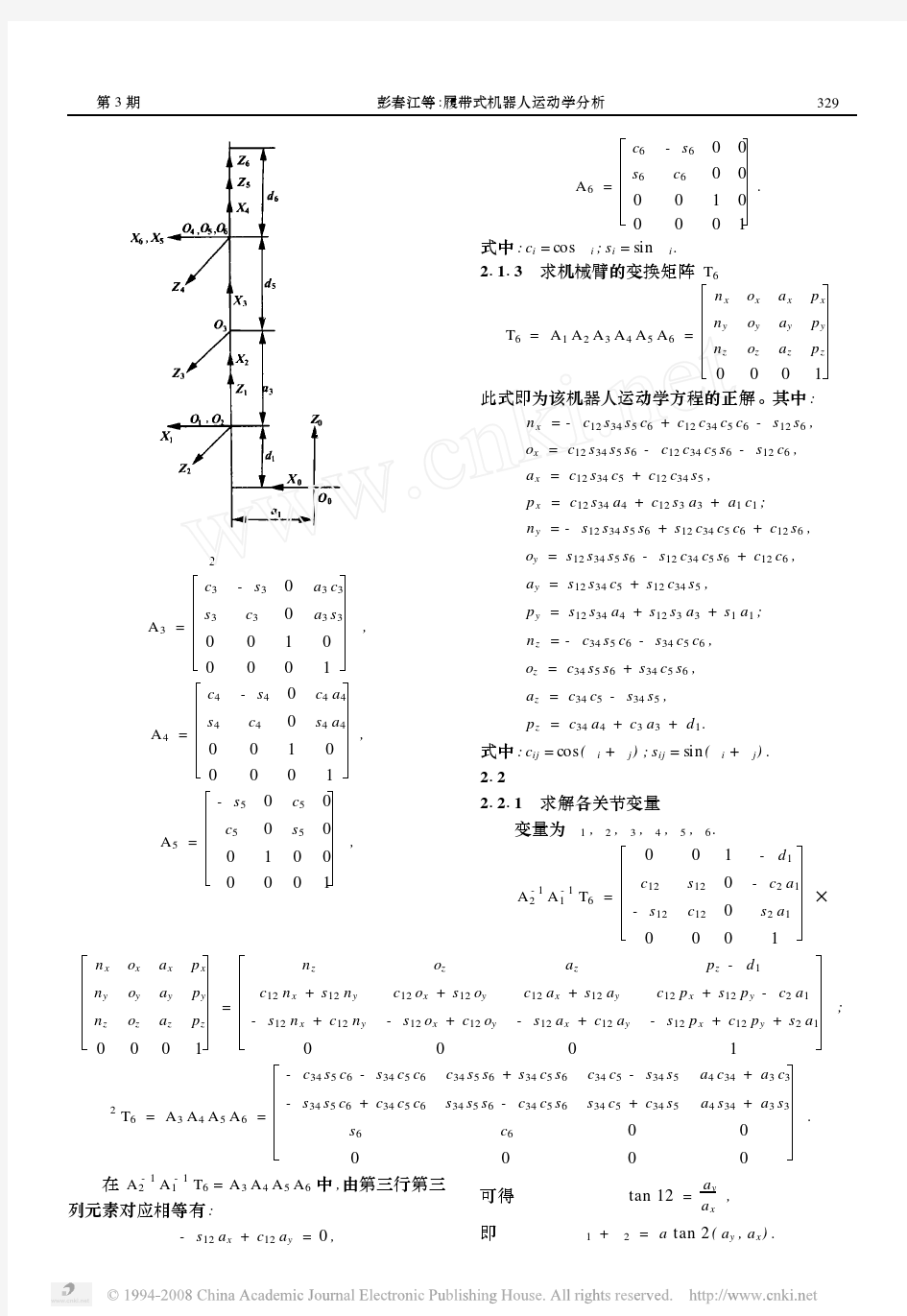
【摘要】阐述了履带式机器人的运动机构,并对其运动学性能进行了分析.采用空间坐标变换基本原理及坐标变换的矩阵解析方法建立了运动方程,并在此基础上求出其逆解,同时对解进行了分析.为机器人的空间位置实时控制提供了理论依据和有力保证.
【期刊名称】《太原理工大学学报》
【年(卷),期】2004(035)003
【总页数】4页(P328-331)
【关键词】履带式机器人;运动学分析;空间坐标变换;矩阵解析法
【作者】彭春江;武利生;李元宗
【作者单位】太原理工大学,机械工程学院,山西,太原,030024;太原理工大学,机械工程学院,山西,太原,030024;太原理工大学,机械工程学院,山西,太原,030024
【正文语种】中文
【中图分类】基础科学
第 35 卷第 3 期 2004 年 5 月太原理工大学学报JOURNAL OF TAIYUAN UNIVERSITY OF TECHNOLOGY Vol.35No.3May2004 文章编号: 1 007 9432(2004)03-0328-03 履带式机器人运动学分析彭春江,武利生,李元宗(太原理工大学机械工程学院,山西太原 030024)摘要:阐述了履带式机器人的运动机构,并对其运动学性能进行了分析。采用空间坐标交换基本原理及坐标交换的
相关主题