1500运动控制常见功能所用编程指令
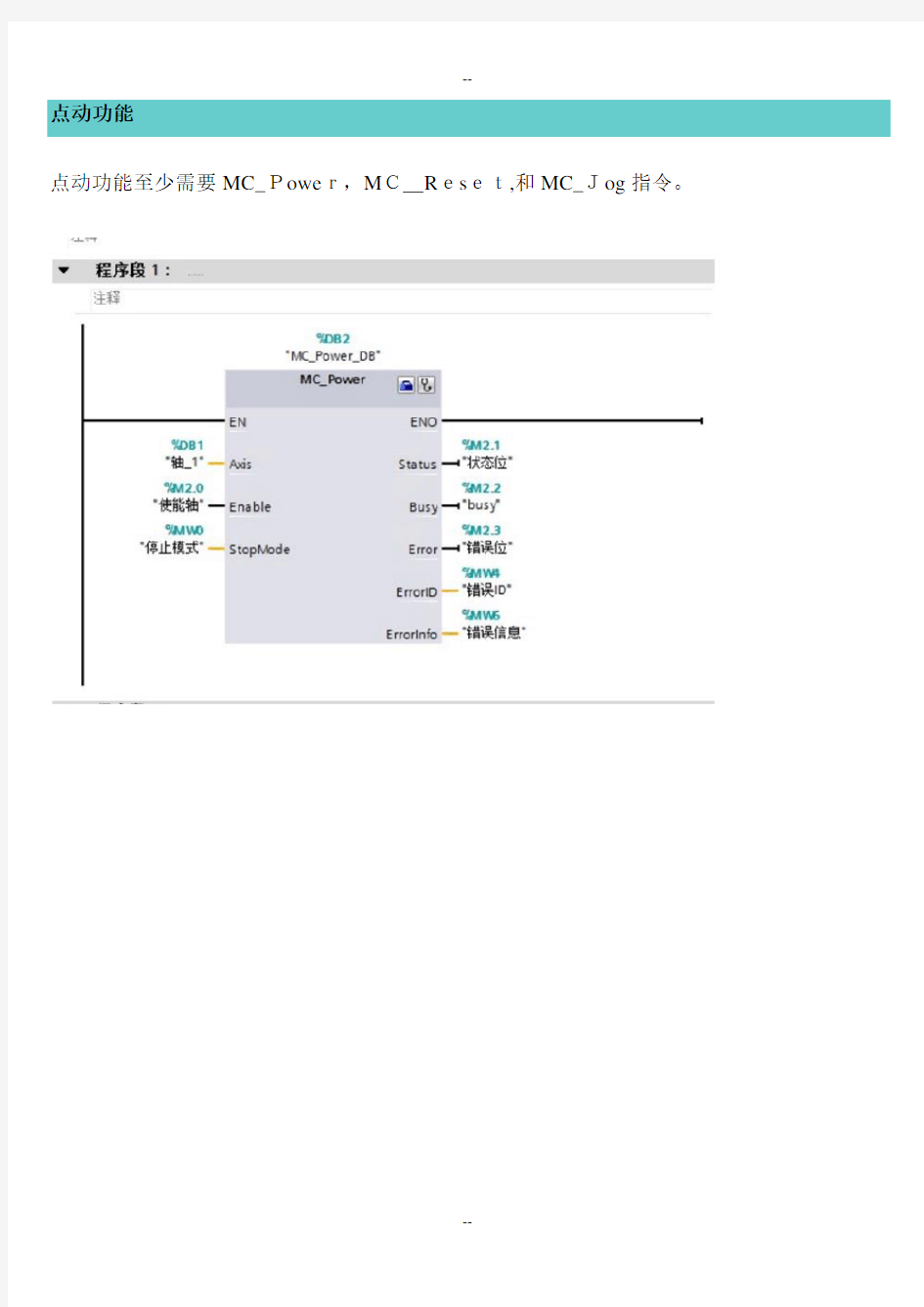
点动功能
点动功能至少需要MC_Power,MC_Reset,和MC_Jog指令。
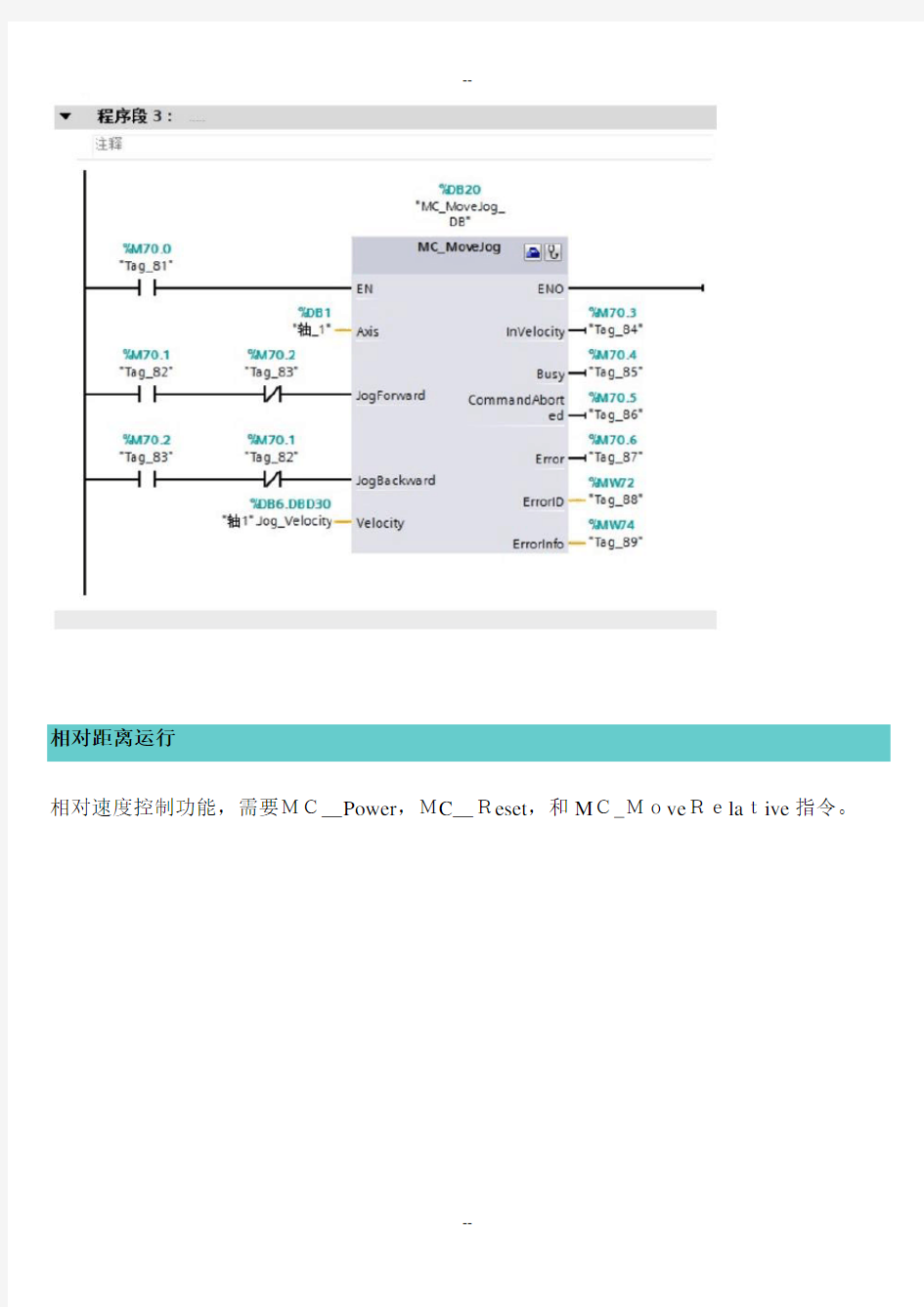
相对距离运行
相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveRelative指令。
以速度连续运行
相对速度控制功能,需要MC_Power,MC_Reset,和MC_MoveVolcity,以及MC_Halt 指令。
启用/禁用工艺对象:MC_Power
确认报警.重新启动工艺对象Mc_rest
相对定位轴:Mc_MoveVelocity
暂停轴:MC_halt
S7-1200运动控制指令
用户组态轴的参数,通过控制面板调试成功后,就可以开始根据工艺要求编写控制程序了。
关于运动控制指令有几点需要说明:
1. 打开OB1块,在Portal软件右侧“指令”中的“工艺”中找到“运动控制”指令文件夹,展开“S7-1200 MotionControl”可以看到所有的S7-1200运动控制指令。可以使用拖拽或是双击的方式在程序段中插入运动指令,如下图所示,以MC_Power指令为例,用拖拽方式说明如何添加Motion Control指令。
这些Motion Control指令插入到程序中时需要背景数据块,如下图所示,可以选择手动或是自动生成DB块的编号。
添加好背景DB后的MC_Power指令如下图所示。
『注意』运动控制指令之间不能使用相同的背景DB,最方便的操作方式就是在插入指令时让Portal软件自动分配背景DB块。
2. 运动控制指令的背景DB块在“项目树”-->“程序块”--> “系统块”-->“程序资源”中找到。用户在调试时可以直接监控该DB块中的数值,如下图所示。
3. 每个轴的工艺对象都一个背景DB块,用户可以通过下面的方式打开这个背景DB块:
可以对DB块中的数值进行监控或是读写。
以实时读取“轴_1”的当前位置为例,如下图所示,轴_1的DB块号为DB1,用户可以在OB1调用MOVE指令,在MOVE指令的IN端输入:DB1.Position,则Portal软件会自动把DB1.Position更新成:“轴_1”.Position。用户可以在人机界面上实时显示该轴的实际位置。
运动技能学习与控制(作业),DOC
1.简述运动技能的四个特征 指向目标,即动作技能都有操作目标; 动作技能的操作具有随意性; 动作技能需要身体、头、和/或肢体的运动来实现任务目标; 为了实现技能的操作目标,需要对动作技能进行学习或再学习;在金泰尔的分类法中,动作技能分类的两个纬度分别是什么 操作的环境背景特征:①调节条件 ②尝试间变化 表征技能的动作功能:①身体定向 ②操纵 在金泰尔的分类系统中调节条件是指什么 调节条件是指技能操作中必然存在并影响操作者运动特征的环境背景。 第二章 什么是操作结果测量、操作过程测量两者的差异根据两者测量的方法举出三至四个运动教学中运动技能 测量的例子。 操作结果测量:指为了说明动作技能操作结果而进行测量。 操作过程测量:为了说明在动作操作过程中运动控制系统某些方面的操作状态而进行的一种动作技能操作测量。
①操作结果测量没有提供产生操作结果前肢体或身体行为的任 何信息; ②没有关于运动过程中参与工作的肌肉系统的活动信息; 举例: 操作结果测量:①一英里跑或打一个字所用的时间; ②从发令枪响到起跑动作开始的时间; ③垂直纵跳的高度; 操作过程测量:①动作过程中肢体经过的高度; ②动作过程中肢体运动速度; ③运动中加速或减速的模式; 2.简述简单反应时、选择反应时和辨别反应时及区别。(1)简单反应时:指测试情景中只包含单一刺激并要求被试者做出单一反应动作,这时所测的反应时称为简单反应时。 (2)选择反应时:指测试情景中包含两个或两个以上的信号,每个信号需要特定的反应形式,这时测得的反应时为选择反应时。 (3)辨别反应时:指测试情景中包含两个或两个以上的信号,但被试者只需对其中的一个做出反应,对其他信号不做反应,这时测得的反应时为辨别反应时。 区别:①从刺激信号的数量来判断是不是简单反应 时;②从做出的反应的信号数量来判断是不是辨别反应时。
双轴运动控制器操作手册
双轴运动控制器操作手册 目录 一 与外部驱动器及IO(输入输出)接线图 (3) 二 用户管理操作 (4) 三 系统参数设置 (5) 四 IO(输入输出)设置 (6) 五 系统自检操作 (8) 六 手动操作 (9) 七 编程操作 (11) 八 自动执行 (13) 九 指令详解 (14) 十 电子齿轮计算及公式 (15) 十一 编程案例 (17)
十二 常见问题及处理 (19)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线) 注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二 用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。 用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO 设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分4屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。 修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。若保存成功则提示“参数保存成功”。
运动控制卡简介
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
运动控制指令介绍
运动及轴命令 ACC 类型:轴指令 语法: ACC(rate) 注意:这个指令用来和旧的Trio控制器兼容。在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。 说明:同时设定加速度率和减速度率 参数:rate:加速率,单位:UNITS/SEC/SEC 例子: 例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机 ACC(120) ‘ 加减速同时设为 120 units/sec/sec SPEED=14.5 ‘ 电机速度设为 14.5 units/sec MOVE(200) ‘ 电机走 200个units的增量距离 ADD_DAC 类型:轴指令 语法: ADD_DAC(轴) 说明: ADD_DAC指令提供双反馈控制。允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。 这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。 当一个运动轴,带两个反馈编码器时,用到这条指令。实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上 如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。 注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。 使用ADD_DAC(-1)取消连接 参数:轴 速度参考输出到基本轴,设置-1取消连接,并返回正常操作。 参阅: AXIS,ADDAX,OUTLIMIT
例1: BASE(1) ‘使两轴编码器在相同的线性距离反馈回相同的计数 ENCODER_RATIO(counts_per_mm2, counts_per_mm1) UNITS AXIS(1) = counts_per_mm1 UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同 ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上 ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上 ‘到现在,两轴已经准备就绪 MOVE(1200) WAIT IDLE ADDAX 类型:运动控制指令 语法: ADDAX(轴号) 说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
S71200 运动控制 回原点(2)
MC_Home 指令名称:回原点指令 功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。 使用要点:轴做绝对位置定位前一定要触发MC_Home指令。 『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。 ①Position:位置值 ?Mode = 1时:对当前轴位置的修正值 ?Mode = 0,2,3时:轴的绝对位置值 ②Mode:回原点模式值 ?Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值 ?Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置+ 参数“Position”的值 ?Mode = 2:被动回零点,轴的位置值为参数“Position”的值 ?Mode = 3:主动回零点,轴的位置值为参数“Position”的值 下面详细介绍模式0和模式1. Mode = 0绝对式直接回原点 以下图为例进行说明。该模式下的MC_Home指令触发后轴并不运行,也不会去寻找原点开关。指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是MC_Home指令的“Position”管脚的数值。例子中,“Position”=0.0mm,则轴的当前坐标值也就更新成了0.0mm。该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动。
『优点』MC_Home的该模式可以让用户在没有原点开关的情况下,进行绝对运动操作。 Mode = 1相对式直接回原点 与Mode = 0相同,以该模式触发MC_Home指令后轴并不运行,只是更新轴的当前位置值。更新的方式与Mode = 0不同,而是在轴原来坐标值的基础上加上“Position”数值后得到的坐标值作为轴当前位置的新值。如下图所示,指令MC_Home指令后,轴的位置值变成了210mm.,相应的a和c点的坐标位置值也相应更新成新值。 Mode = 2和Mode = 3已在前面介绍过,这里不再赘述。 『注意』用户可以通过对变量<轴名称>.StatusBits.HomingDone = TRUE与运动控制指令“MC_Home”的输出参数Done = TRUE进行与运算,来检查轴是否已回原点。
伺服电机与运动控制卡的连接
伺服电机与运动控制卡的连接 1、初始化参数 2、在接线之前,先初始化参数。 在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。 在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置 3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。 6、调整闭环参数
运动控制向导为运动轴创建的指令
运动控制向导为运动轴创建的指令 运动向导根据所选组态选项创建唯一的指令子程序,从而使运动轴的控制更容易。各运动指令均具有“AXIS x_”前缀,其中x代表轴通道编号。由于每条运动指令都是一个子程序,所以11 条运动指令使用11 个子程序。 说明:运动指令使程序所需的存储空间增加多达1700 个字节。可以删除未使用的运动指令来降低所需的存储空间。要恢复删除的运动指令,只需再次运行运动向导。
详细的运动控制指令介绍请参考:S7-200 SMART 系统手册 运动控制指令使用准则 必须确保在同一时间仅有一条运动指令激活。 可在中断例程中执行AXISx_RUN 和AXISx_GOTO。但是,如果运动轴正在处理另一命令时,不要尝试在中断例程中启动指令。如果在 中断程序中启动指令,则可使用AXISx_CTRL 指令的输出来监视运动轴是否完成移动。 运动向导根据所选的度量系统自动组态速度参数(Speed 和C_Speed)和位置参数(Pos 或C_Pos)的值。对于脉冲,这些参数为DINT 值。对于工程单位,这些参数是所选单位类型对应的REAL 值。例如:如果选择厘米(cm),则以厘米为单位将位置参数存储为REAL 值并以厘米/秒(cm/sec) 为单位将速度参数存储为REAL 值。 有些特定位置控制任务需要以下运动指令: 要在每次扫描时执行指令,请在程序中插入AXISx_CTRL 指令并使用SM0.0 触点。
?要指定运动到绝对位置,必须首先使用AXISx_RSEEK 或AXISx_LDPOS 指令建立零位置。 ?要根据程序输入移动到特定位置,请使用AXISx_GOTO 指令。 ?要运行通过位置控制向导组态的运动包络,请使用AXISx_RUN 指令。 其它位置指令为可选项。 常用运动控制指令介绍 1. AXISx_CTRL 功能:启用和初始化运动轴,方法是自动命令运动轴每次CPU 更改为RUN 模式时加载组态/包络表。 图1. AXISx_CTRL指令 注意: 在您的项目中只对每条运动轴使用此子例程一次,并确保程序会 在每次扫描时调用此子例程。使用SM0.0(始终开启)作为EN 参数的输入。
三菱PLC运动控制指令的对比、使用
三菱PLC运动控制指令的对比、使用 今天来说说以下这些指令功能的区别以及使用场合。主要有PLSY、PLSR、PLSV、DRVI、DRVA 五个指令的不同。 1、PLSY脉冲输出 指令语句 PLSY S1 S2 D1 S1是指定频率,S2是脉冲数量,D1是脉冲输出端口,从这个指令看出没有旋转方向控制或者说方向不能自动识别,在实际运转中需要指令方向,它的脉冲寄存器是累计型的就是说无论正反转脉冲数量都是增加的,不随着旋转方向的改变进行增减计数,这样就决定了指令中断后没有位置记忆。 指令在OFF后,再次ON的时候是从最初开始的,意思是说,要走2000个脉冲,走到1000突然指令中断,重新ON后,又需要走2000个才停下来。需要注意的是指令执行中修改S1有效,S2无效,需要下次执行有效,指令中断后立即停止脉冲输出没有加减速。可以看出这只是一个简单的定位指令,
缺点: ①旋转方向不自动识别,需要指定 ②没有位置记忆功能 ③没有加减速功能 2、PLSR加减速脉冲输出 指令语句 PLSR S1 S2 S3 D1,相比于PLSY,PLSR指令多了一个加减速时间S3,在输出脉冲时,可以进行加减速脉冲输出,其他都一样。此外数据S1 S2指令运行中修改无效,在下一次的指令驱动时,更改内容有效。 3、PLSV可变速脉冲输出 指令语句PLSV S1 D1 D2,S1是脉冲频率,D1是脉冲输出端,D2是旋转方向输出,从指令看出它的旋转方向不需要指定,能够自动输出旋转方向,没有指定的定位功能,但可以从脉冲寄存器获得位置信息。 注意: a.S1的值可设置为负 b.指令运行中可改变S1频率的值(特别注意在换符号时需要先将S1设为0再修改,比如 频率有+200改为-500,必须要先将值有200设置为0再由0改为-500) c.脉冲寄存器的增减计数由S1的符号决定,同样旋转方向也是 d.可通过置位特殊辅助继电器M8338激活加减速功能,加减速通过特殊数据寄存器设置完 成,在遇到指令断开、正反转极限标志减速停止。 相比于PLSY、PLSR而言,PLSV带有加减速功能,旋转方向可控,具有位置记忆,在定位需要计算目标位置的距离与方向。 4、DRVI相对单速定位
AB集成运动控制系统培训手册
WOD动手实验室 集成运动控制系统Motion Control On Logix 培训实验教材
欢迎来到WOD的动手实验室 这个实验,将展示Kinetix集成运动控制的如下理念: à提高使用效率、并节省时间 à强大功能和卓越的性能 在这个实验中您将学习到RSLogix 5000 软件环境――罗克韦尔的集成运动解决方案中配置、编程和调试以及故障诊断的唯一软件工具,以及在这样一个简单的环境中方便的调整和规划您的运动过程。通过如下的步骤,您将轻松的体验到如何创建一个集成化的运动控制系统 à通过使用RSLogix 5000创建和配置运动轴 à学习一些基本的运动控制指令并学习编写运动控制的程序 à高级运动指令的学习。 在这个实验中您将会知道Logix 是如何帮助您在减少软硬件的数量的同时又使得在控制系统中对大量数据、信息的访问更加灵活方便。 实验设备和材料: 在这个实验中您将需要如下软硬件材料 *软件 您的PC电脑需要安装RSLogix5000 和RSLinx *硬件 1756- Lxx 控制器模块 1 1756-ENBT 以太网模块 1 1756-M0xSE 光纤伺服模块 1 1756-PAx 电源模块 1 伺服驱动DEMO 一套,其中包括 在您开始这个实验之前,请先确认以上软硬件是否已经到位,并且按照正确的方法安装并连线,如果准备就绪,您现在可以开始今天的实验了。
一.离线(OFF LINE)创建和配置运动轴 1.打开RSLogix5000。从‘File’菜单或在快捷按钮条中选择新建‘New’。 2.在‘Controller Type’中选择控制器、电源板以及在电源板上的槽号,命名程序名称,以及确定程序的存储路径。
FX系列plc常用运动控制指令
FX系列plc常用运动控制指令 1、PLSR:带加减速功能的定脉冲数脉冲输出指令,以指定的速度输出一定数量的脉冲,并且,启动时有加速过程,停止时有减速过程。 指令输入方式:[PLSR K3000 K2000 K300 Y0] K3000:最高输出频率 K2000:脉冲数量 K300:加减速时间(单位ms) Y0:脉冲输出点 2、PLSY:基本脉冲输出指令,以一定的频率输出指定数量的脉冲,但是没有加减速过程。 指令输入方式:[PLSY K2000 D0 Y0] K2000:指定的脉冲输出频率 D0指定的脉冲输出数,当该值为0时,输出脉冲不受限制 Y0:指定的脉冲输出端子 3、PLSV:可调脉冲输出指令,可以实时改变脉冲频率。该指令无法设置发出脉冲的总数,也就是不能通过指令定位。 指令输入方式:[PLSV D0 Y0 Y3] D0:脉冲输出频率 Y0:发出脉冲的输出点 Y3:方向点 4、DRVA:绝对定位指令,它的脉冲总数实际是它要到达的目标值,也就是和各高速点计数寄存器相匹配,例如,当你输入脉冲目标值为4000,而你高速点的计数寄存器中是6000,这时它会朝着反向发出2000个脉冲。 指令输入方式:[DRVA K4000 K3000 Y0 Y3] K4000:脉冲总数 K3000:脉冲频率 Y0:脉冲的输出点 Y3:脉冲的方向点 注意:每个高速脉冲输出点都有自己的脉冲计数寄存器,无论通过哪个指令发出脉冲,高速脉冲输出点都会有一个特定的寄存器记录所发出的脉冲数,包括正向的和反向的,可做为运动控制中每个轴的坐标。
5、DRVI:相对定位指令,它的脉冲总数是以当前位置为起点将要运动的距离,而不考虑高速点计数器中的脉冲数。 指令输入方式:[DRVI K4000 K3000 Y0 Y3] K4000:脉冲总数 K3000:脉冲频率 Y0:脉冲的输出点 Y3:脉冲的方向点 6、ZRN:回原点指令,该指令触发后PLC开始输出脉冲控制电机以第一速度运动,在原点信号的上升沿切换到第二速度运动,在原点信号的下降沿停止运动。 指令输入方式[ZRN K6000 K1000 X0 Y0] K6000:运动到原点之前的第一运动速度 K1000:运动到原点之后的第二运动速度 X0:原点信号 Y0:脉冲的输出点
运动控制系统基本概念介绍
运动控制系统基本概念介绍 作者:激情如火,2005-10-26 19:06:00 发表于:《运动控制论坛》共有8人回复,1051次点击加为好友发送留言 一个运动控制系统一般包括,处理运动算法和信号的控制器;一个能增强信号、可供应执行器提供运动输出放大器;反馈(传感器/变送器)系统,可基于输出和输入的比较值,调节过程变量。 系统还包括一个操作员界面或主机终端前端处理(front-end)设备。反馈意味着大多数运动控制系统是闭环系统;但是,也不排除一些是开环系统,特别是步进电机系统中。执行器有各种形式--电动机、汽缸、螺旋线圈等,可以是电气的、液压的、气动的或其他类型的设备。 轴:机械或系统的任何可移动的部分,需要被控制的运行。不少的运动轴能合并在一个同等的多轴系统中; 圆弧形补间运动:两个独立的运动轴的协调运动可产生一个圆形的运动。它通过软件算法以一系列的近似直线来实现; 换相:电动机线圈的连续的激励可在转子和定子磁场中维持相对的相位角,在规定的范围内,控制电动机的输出。在有刷DC电动机中,这一功能由机械整流器和碳刷完成;在无刷电动机中,以转子位移反馈完成; 电子齿轮:通过电子方式模拟机械传动的一种方法,以变量比方式"强制"一个闭环回路轴从动于另一个轴(开环或闭环回路); 编码器:一个反馈设备,能解释机械运动,以电子信号表现执行器的位移。增量和绝对编码器较为常用,型号多样;同样,它们的输出也表示出位移的增加和绝对改变值; 前馈:一种方法,根据电动机、驱动器或负荷特性得出的已知的误差,提前补偿一个控制回路,以提高响应。它仅取决于指令,而不是测量误差; 分度器:一个电子单元,可将来自于主机、PLC或操作员面板的高层命令转换为步进电机驱动器所需的阶跃和指向脉冲信号;
三菱PLC运动控制指令的对比、使用
指令语句 PLSY S1 S2 D1 S1 三菱PLC 运动控制指令的对比、使用 今天来说说以下这些指令功能的区别以及使用场合。主要有 PLSY 、PLSR 、PLSV 、DRVI 、 DRVA 五个指令的不同。 融冲输出 r ■ ■ PLSR J 1、PLSY 脉冲输出 是指定频率,S2是脉冲数量,D1是脉冲输出端口,从这个 指令看出没有旋转方向控制或者说方向不能自动识别, 在实际运 转中需要指令方向, 它的脉 冲寄存器是累计型的就是说无论正反转脉冲数量都是增加的, 不随着旋转方向的改变进行增 减计数,这样就决定了指令中断后没有位置记忆。 指令在OFF 后,再次ON 的时候是从最初开始的, 意思是说,要走2000个脉冲,走到1000 突然指令中断,重新 ON 后,又需要走 2000个才停下来。需要注意的是指令执行中修改 S1有效,S2无效,需要下次执行有效,指令中断后立即停止脉冲输出没有加减速。可以看 込理I 挖制指十 脉沖输山
出这只是一个简单的定位指令, 缺点: ①旋转方向不自动识别,需要指定 ②没有位置记忆功能 ③没有加减速功能 2 、PLSR 加减速脉冲输出 指令语句PLSR S1 S2 S3 D1,相比于PLSY, PLSR指令多了一个加减速时间S3,在输出脉 冲时,可以进行加减速脉冲输出,其他都一样。此外数据S1 S2 指令运行中修改无效,在下一次的指令驱动时,更改内容有效。 3 、PLSV 可变速脉冲输出 指令语句PLSV S1 D1 D2 , S1 是脉冲频率, D1 是脉冲输出端, D2 是旋转方向输出,从指令看出它的旋转方向不需要指定, 能够自动输出旋转方向, 没有指定的定位功能, 但可以从脉冲寄存器获得位置信息。 a. S1 的值可设置为负 b. 指令运行中可改变S1 频率的值(特别注意在换符号时需要先将S1 设为0 再修改, 比如频率有+200 改为-500 , 必须要先将值有200 设置为0 再由0 改为-500) c. 脉冲寄存器的增减计数由S1 的符号决定,同样旋转方向也是 d. 可通过置位特殊辅助继电器M8338 激活加减速功能, 加减速通过特殊数据寄存器设置完成,在遇到指令断开、正反转极 限标志减速停止。 相比于PLSY、PLSR 而言, PLSV 带有加减速功能,旋转方向可控,具有位置记忆,在定位 需要计算目标位置的距离与方向。 4 、DRVI 相对单速定位
运动控制器的程序设计
运动控制器的程序设计 本系统采用的下位机为翠欧运动控制器MC206,根据本课题的要求,为了方便进行系统的调试和控制,缠绕机的工作方式分为手动、自动和半自动三种[7]。手动工作状态是单独控制小车轴和主轴的运动来实现指定缠绕;自动工作状态是控制主轴和小车同步运动;半自动工作状态是运用其BASIC 语言用电子齿轮运动,其中齿轮比是可调的。自动控制方式下,为实现玻璃钢的锥形的同步缠绕,Trio basic 语言中的MOVELINK 命令可以实现主轴和小车的运动,通过设定连接轴和被连接轴的加减速的距离,从而实现预期缠绕。以下为自动的控制方式下的流程图: MOVELINK 为运动控制类命令,在基本轴产生直线运动,并通过电子齿轮比与连接轴的测量位置连接。其具体使用格式如下: 开始 自动 选择主轴 程序退出 启动缠 自动加减速缠 N
MOVELINK(distance,link dist,link acc,link dec,link axis[,link options][,link start]) 具体参数含义: distance 连接开始至结束当前基准轴(连接轴)增量运动距离; link dist 在用户单位下,从连接开始到结束,被连接轴(主轴)移动的正向距离; link acc 基准轴加速过程中,主轴转过的正向距离; link dec 基准轴减速过程中,主轴转过的正向距离; link axis 连接轴、主轴; link options 1当主轴色标信号触发时,从轴与主轴开始连结; 2当主轴运动到设定的绝对位置,从轴与主轴开始连结; 4 MOVELINK自动重复连续双向运行。设置REP_OPTION=1,取消此操作; link pos 这个参数是绝对位置,当参数6设成2,MOVELINK在这个位置开始连结; 参数6和7可选。 其中,参考参数为AXIS,REP_OPTION,UNITS 参数表明,连接轴可以向任意方向驱动输出,基本轴的距离使得连接轴移动相应的距离。连接轴驱动基准轴的移动距离可以分成三个阶段分别是加速、匀速、减速部分。其中加速度和减速由link acc和link dec参数设置。常速连接距离由总连接距离和以上两个参数。这三个阶段可以用三个独立的MOVELINK指令也可以将其叠加在一条指令中。并且使用本指令有两条规律。