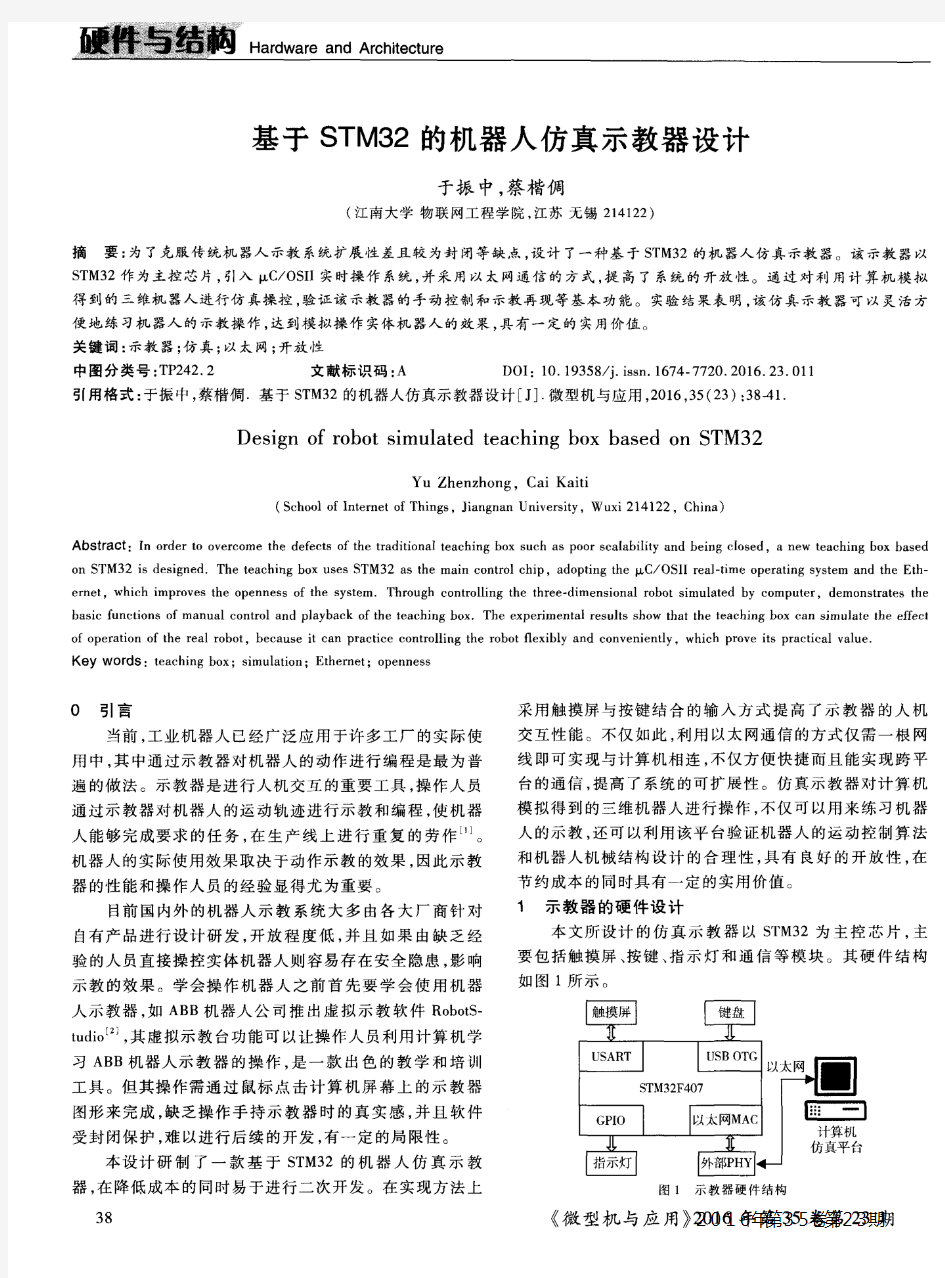
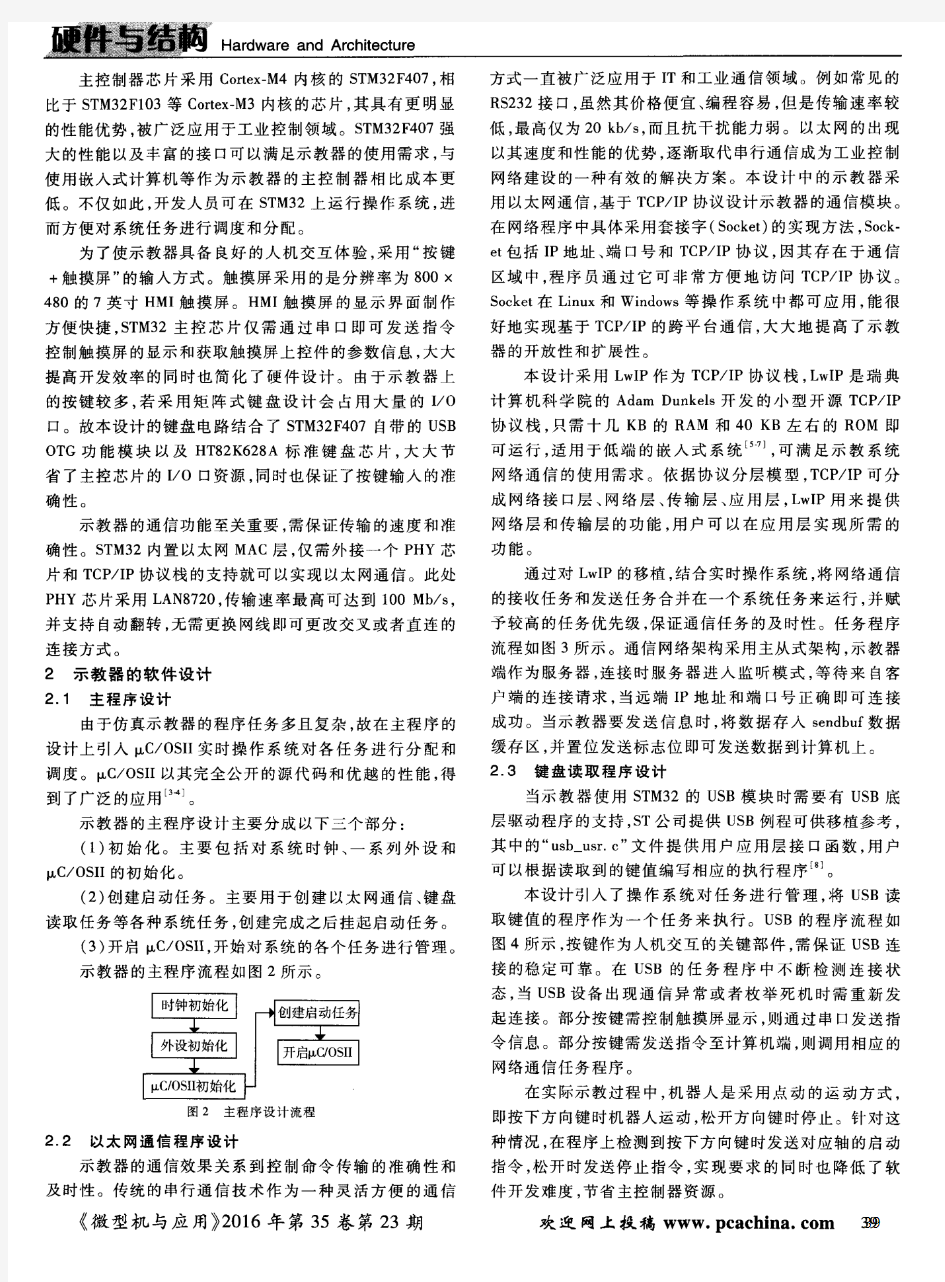
基于STM32的机器人仿真示教器设计
最新西华大学机器人创新设计实验报告(工业机械手模拟仿真)
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)
一种码垛机器人的设计与仿真
一种码垛机器人的设计与仿真 节 1.01 摘要 21世纪,科学技术的发展可谓日新月异,各种信息技术的不断发展进步,推动着社会生产的各个领域的进步,尤其是自动化技术的应用。码垛技术是近年来活跃在物流自动化领域的一项新兴的技术。码垛技术的概念是指在日常的物流运输的过程中,为了实现实现物料的搬运、装卸等物流的活动,设计一定的物料的堆码成垛的模式,这种模式是基于集成单元化的思想之上的,这种堆码成垛实现物流运输的技术就是码垛技术。 我们在实现码垛技术的同时,发明了相关的码垛机器人。码垛机器人是基于码垛技术而产生的,它是一种具备特殊功能的机器人,具有垂直的多关节型的特点。码垛机器人自产生以来,已经广泛应用于社会生产的不同的专业领域,比如食品加工、石油化工等。对于不同的物流对于码垛要求参数的不同,码垛机器人可以通过自身的主计算机进行相应的参数的设置,从而进一步实现不同产品包装的码垛要求。现代物流的发展,对于码垛机器人的要求也呈现出越来越高的趋势,比如物料的码垛的精度的提高,是的码垛机器人必须具有一定的刚度和强度,防止搬运过程中出现差池。 本文主要是设计一种码垛机器人的机械部分,应用于自动化生产线的物料的码垛。在进行码垛机器人的设计的时候,主要是结果机械、电子以及码垛机器人的软件等方面,根据不同方面的特点进行综合的分析,实现码垛机器人的设计。 关键词:码垛技术,机器人,有限元分析,运动仿真 Abstract In the 21st century, the development of science and technology is changing, all kinds of the continuous development of information technology progress, push the progress of the various fields of social production, especially the application of automation technology. Stacking technology is active in recent years a new technology in the field of logistics automation. Stacking technology refers to the concept of in the daily logistics transportation process, in order to achieve the
二自由度机器人的结构设计与仿真
二自由度机器人的结构设计与仿真 学院:专业:姓名:指导老师: 机械与车辆学院 机械电子工程 学号: 职称:教授 中国·XX 二○一二年五月
毕业设计诚信承诺书 本人郑重承诺:本人承诺呈交的毕业设计《二自由度机器人的结构设计与仿真》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。 本人签名: 日期:年月日
二自由度机器人的结构设计与仿真 摘要 并联机器人有着串联机器人所不具有的优点,在应用上与串联机器人形成互补关系。二自由度并联机器人是并联机器人家族中的重要组成部分,由于结构简单、控制方便和造价低等特点,有着重要的应用前景和开发价值。本论文研究了一种新型二自由度平移运动并联机构,该并联机构采用类五杆机构,平行四边形刚架结构来实现,可有效地消除铰链间隙,提高动平台的工作性能,同时有抵抗切削颠覆力矩的能力。 根据该二自由度平面机构的工作空间,利用平面几何的方法求得连杆的长度,并通过Pro/E软件进行仿真检验,并通过软件仿真的方式,优化连杆长度,排除奇异点,同时合理设计机械结构的尺寸,完成结构设计。 对该二自由度并联机器人,以Pro/E为平台,建立两自由度平移运动并联机器人运动仿真模型,验证了机构的实际工作空间和运动情况。最后指出了本机构的在实际中的应用。并使用AutoCAD软件进行了重要装置和关键零件的工程图绘制工作,利用ANSYS 软件分析了核心零件的力学性能。研究结果表明,本文所设计的二自由度机器人性能良好、工作灵活,很好地满足了设计指标要求,并已具备了一定的实用性。 关键词:二自由度;并联机器人;仿真;结构设计;Pro/E
机器人学仿真课题设计
基于omega.7的上肢功能测试虚拟场景的设计 一.背景 随着人口老龄化的加剧,脑卒中患者越来越多。对于脑卒中后患者的康复训练方法各不相同。如何判断康复训练的效果,是训练医生面临的一个很重要的问题。拿上肢康复训练来说,目前的上肢和手部功能的测量方法,例如:Fugl-Meyer运动功能评量表、盒子和阻碍物测试等具有一些缺点:1)采用打分制,不同的人或者同一人在不同时间,其对于同一种情况的打分情况不一定相同,缺少定量的评价。2)管理管理时间花费大。3)其测量数据无法直接用于临床医学。4)需要病人进行大量测试。 为了解决这问题,我们需要一些目的性更强、更可靠的、定量的评估方法。虚拟现实技术和力反馈装置的结合使用能够克服这些不足,达到较好的评估效果。 虚拟现实技术可模拟出与真实世界相同的虚拟世界,利用各种交互传感设备,通过视觉听觉和力觉等直观而又实时的感知,使人沉浸在虚拟环境中,产生身临其境的临场感用户可根据自身的感觉,通过输入设备对虚拟世界中的物体进行操作,参与其中的事件长期以来,由于计算机技术,传感技术等的限制,人们的研究重点都集中在视觉和听觉等较易突破的方面,而较少关注力觉这一重要的感官形态研究表明,与传统的视觉和听觉再现人机交互相比,力觉再现能更好的提高虚拟现实系统的真实感,并在一定程度上提高事件的执行效率和成功率 力反馈( ) 是在人机交互过程中,计算机对操作者的行为做出反应,并通过力反馈设备作用于操作者的过程作为虚拟现实系统中操作者和虚拟环境的交互接口,力反馈设备将操作者的行为( 包括位置动作和速度等) 通过传感器实时监测,把数据输入到计算机,然后将虚拟环境生成的力感反馈给操作者,使操作者获得和触摸真实物体相同的力感[]力反馈设备是实现人机交互的关键设备,借助于它,人们可以按照自然方式进行人机互动和信息交流。力觉交互作为虚拟现实交互中最需要完善和最重要的交互途径,有着不可替代的优越性,而力反馈器的性能直接决定了力觉交互的效果 二.力反馈设备Omega.7 Omega.7是由瑞士Force Dimension公司研发的固定式力反馈装置,采用独特的并联运动结构,将轻巧的铝制金属杆与牢固的传动装置结合在一起,具有超高的性能,极大的减小了惯性效应。此外,Omega.x系列产品采用平行的机械设计,有效的保证了装置的整体硬度和坚固性,从而使其牢固可靠,坚实耐用。 其共有7个自由度,包括3个平移自由度,3个旋转自由度和1个抓取功能。其中平移关节和抓取关节都具有力反馈。同时,卓越的机械刚度与实时USB2.0控制器相结合,并能以4千赫率的速率对接触力进行处理,远远大于I000Hz(最高可达8000Hz),在发生碰撞检测是可以获得平滑的效果,保证力触觉交互系统的稳定性"为了确保较高的触觉透明度,设备通过将启动与未启动的部件相结合,保持了在平移和其它方向区域中的重力补偿。每个系统均可单独进行校准,确保可重复的最佳精度和性能。 是当前世界上较先进的台式七自由度触觉设备,它在omega.3的功能基础上,将末端控
机器人装配工作站仿真设计毕业设计
1.绪论 1.1引言 进入到新世纪以来,我国的现代工业也得到了十分快速的发展,自动化生产线是能实现产品生产过程自动化的一种机器体系,通过采用一套能自动进行检测、上下料、视觉分拣、装卸、运输的设备,组成高度连续的、完全自动化的生产线,来实现产品的生产。自动化生产线实现了无需人工操作,生产过程几乎无差错,节省了劳力,财力,大大降低了危险系数。装配生产线中人工装配占用的手工劳动量大,装配费用高,装配的生产率低。而机器人的自动装配可以完成大量且复杂的装配操作,实现机器人自动化装配,能够大大提高生产效率,降低成本,保障安全。为了进一步安全且低成本的了解自动装配过程,我们可以将自动化装配生产线工作站模型导入到虚拟仿真软件中,进行一系列的编程,将生产过程完美的呈现在软件中。 自动化生产线实现了无需人工操作,提高了生产效率、安全系数、降低了成本。已然成为工业发展的必经之路。人工装配往往在长时间内重复单纯、强度比较大的工作,而机器人自动化装配能够保证产品质量,提高生产率,降低成本,改善劳动条件。基于DELMIA的机器人装配工作站仿真设计,将生产过程在软件中呈现,可以大大减少设备的损坏,降低操作者的风险,使操作者可以更放心的模拟生产过程,找出其中的错误。在教学上也会更加方便,更加安全。 1.2国内外研究现状 国内:自动生产线是由工件传送系统和控制系统,将一组自动机床和辅助设备按照工艺顺序联结起来,自动完成产品全部或部分制造过程的生产系统,简称自动线。目前,我国能够生产完整的自动化生产线产品企业数量很少,天奇物流系统工程股份有限公司、三丰智能输送装备股份有限公司等是我国自动化生产线产品龙头企业。我国自动装配技术起步的比较晚,现在已经取得了一定的成果。在现在制造业中,20%的工作量是装配,有些产品的装配工作量甚至可以占到整个生产过程的70%左右,同时,在现实的机械制造过程中,有些企业仍然采用手工劳动的方式来完成产品的装配。近年来,国内外许多大中型企业都装备了自动化加工设备和计算机辅助设备与系统。比如:RobotArt、RobotMaster、Robotworks、ROBCAD、DELMIA、RobotStudio、Robomove。这些设备与系统为计算机编程技术的推广提供了基本的条件,使离线编程的实用化成为研究的重点。 国外:目前,国外已大量应用机器人技术,机器人自动化生产线成套装备已成为自动化成套装备的主流以及未来自动化生产线的发展方向。国外汽车行业、电子和电器行业、物流与仓储行业(企业级)等已大量使用机器人自动化生产线,从而保证了其产品的质量和生产的高效。当前,国外将机器人自动化生产线成套装备的共性技术作为重点开发内容。国外从20世纪50年代开始发展装配自动化,现在技术已经相当成熟,国外已将自动化装配应用到
仿生机器人的机构设计及运动仿真
前言 随着仿生学与机器人技术的飞速发展,仿生机器人已日益成为机器人领域的研究热点。仿生学将有关生物学原理应用到对工程系统的研究与设计中,尤其对当今日益发展的机器人科学起到了巨大的推动作用[3]。当代机器人研究的领域已经从结构环境下的定点作业中走出来,向航空航天、星际探索、海洋探索、水下洞穴探索、军事侦察、军事攻击、军事防御、水下地下管道探测与维修、疾病检查治疗、抢险救灾等非结构环境下的自主作业方面发展,未来的机器人将在人类不能或难以到达的已知或未知环境里工作。人们要求机器人不仅要适应原来结构化的、己知的环境,更要适应未来发展中的非结构化的、未知的环境。除了传统的设计方法,人们也把目光对准了生物界,力求从丰富多彩的动植物身上获得灵感,将它们的运动机理和行为方式运用到对机器人运动机理和控制的研究中,这就是仿生学在机器人科学中的应用。 本文结合当前仿生机器人的研究现状与未来发展方向,以慧鱼机器人模型为平台制作对机械本体结构、传动系统,控制系统的软件编程进行了系统设计及介绍。现对研究和实验当中取得的主要成果总结如下: 1.通过对甲虫六条腿的结构与功能的研究,设计了六足仿生机器人的足的结构,实现了机器人的结构仿生。 2.在对仿生模型的结构仿生与运动仿生分析的基础上,确定了采用慧鱼ROBO接口板作为控制器。 3.利用慧鱼ROBO接口板实现了电机和微动的控制,从而对机器人进行运动控制。 4.根据三角步态原理,设计了前进、后退以及转弯等不同运动状态。并对机器人进行了运动分析,得出了一般的结论。 5.以慧鱼公司开发的编程软件:ROBO PRO,对机器人进行软件编程,使它按规定的路线运动,实现对其运动的控制。 本次毕业设计的目的和意义是综合运用大学四年里所学到的基础理论知识达到设计目的并提高自己分析问题和解决问题的能力,提高机械控制系统设计、操纵机构的设计能力及运用PRO/E设计软件的建模能力,并增强自身的动手能力与计算机编程能力。 本课题的研究前景十分广阔。例如,可以通过对海蟹的研究,进行仿生设计,制造出海陆两用的仿生机器人,建立基于环境适应行为的智能运动控制策略。在此基础上,为未来智能化近海两栖作战新概念武器结构设计与分析提供新方法。 对于跟踪国际先进军事技术,建立新型作战武器有重要意义。同时,开展对海的