相机标定误差因素分析
基于OpenCV的CCD摄像机标定方法_雷铭哲_孙少杰_陈晋良_陶磊_魏坤
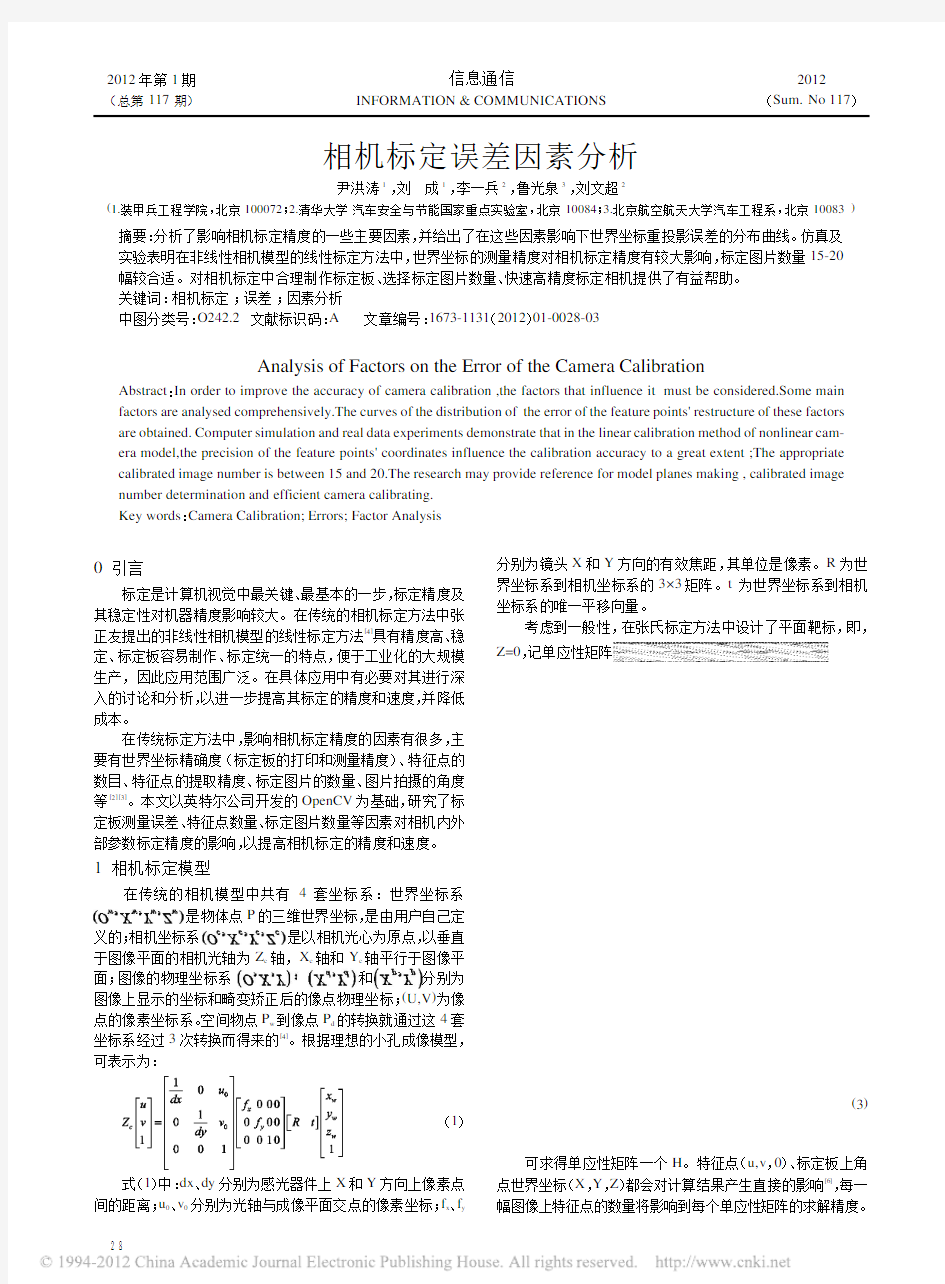
MethodofCCDCameraCalibrationBasedOnOpenCV LEIMing-zhe1,SUNShao-jie2,CHENJin-liang1,TAOLei1,WEIKun1 (1.North Automation Control Technology Institute ,Taiyuan 030006,China ; 2.Navy Submarine Academy ,Qingdao 266042,China )Abstract: Computervisionhasbeenwidelyusedinindustry,agriculture,military,transportationareaandsoon.Cameracalibrationisveryimportantandalsothekeyresearchfieldofvisionsystem.ThispapermainlyresearchesonthemethodofCCDcameracalibration,thepin-holemodelhasbeenintroducedandappliedinprocessofcalibration.Specially,inordertoimprovetheaccuracy,bothradialandtangentiallensdistortionhavebeentakenintoaccountduringtheimplementofcalibrationbasedonOpenCV.Thiskindofarithmetichaspracticalvalueontheapplicationdesignofimageprocessingandcomputervision,andexperimentresultsshowgoodprecision,whichcanmeettheapplicationneedofvisualinspectionorothervisionsystemswell. Keywords: pin-holemodel,cameracalibration,lensdistortion,OpenCV摘要: 计算机视觉在工业,农业,军事,交通等领域都有着广泛应用。摄像机标定是视觉系统的重要环节,也是研究的关键领域。以摄像机标定技术为研究对象,选取针孔成像模型,简述了世界坐标系、摄像机坐标系和图像坐标系及其相互间的位置关系,对标定过程进行了深入研究。特别地,为提高标定精度,充分考虑了透镜径向和切向畸变影响及其求解方法,制作了棋盘格平面标定模板,基于开放计算机视觉函数库(OpenCV)实现了摄像机标定。该标定算法能够充分发挥OpenCV函数库功能,对于图像处理与计算机视觉方面的应用设计具有实用价值。实验结果表明该方法取得了较高精度,能够满足视觉检测或其他计算机视觉系统的应用需要。 关键词:针孔模型,摄像机标定,透镜畸变,OpenCV中图分类号:S219 文献标识码:A 基于OpenCV的CCD摄像机标定方法 雷铭哲1,孙少杰2,陈晋良1,陶 磊1,魏坤1 (1.北方自动控制技术研究所,太原030006;2.海军潜艇学院,山东青岛266042 )文章编号:1002-0640(2014) 增刊-0049-03Vol.39,Supplement Jul,2014 火力与指挥控制 FireControl&CommandControl第39卷增刊 引言 摄像机标定是计算机视觉系统的前提和基础,其目的是 确定摄像机内部的几何和光学特性(内部参数)以及摄像机 在三维世界中的坐标关系(外部系数) [1] 。考虑到摄像机标定在理论和实践应用中的重要价值,学术界近年来进行了广泛的研究。 摄像机标定方法可以分为线性标定和非线性标定,前者简单快速,精度低,不考虑镜头畸变;后者由于引入畸变参数而使精度提高,但计算繁琐,速度慢,对初值选择和噪声敏感。本文将两者结合起来,采用由粗到精策略,以实现精确标定。 1摄像机模型 本文选取摄像机模型中常用的针孔模型[2-3],分别建立三维世界坐标系(O w X w Y w Z w ),摄像机坐标系(O c X c Y c Z c )及图像平面坐标系(O 1xy ) 如下页图1所示。其中摄像机坐标系原点O c 为摄像机光心,Z c 轴与光轴重合且与图像平面垂直,O c O 1为摄像机焦距f 。图像坐标系原点O 1为光轴与图像平面的交点,x ,y 轴分别平行于摄像机坐标系X c 、Y c 轴。设世界坐标系中物点P 的三维坐标为(X w ,Y w ,Z w ),它在理想的针孔成像模型下图像坐标为P (X u ,Y u ),但由于透镜畸变引起偏离[4-5],其实际图像坐标为P (X d ,Y d )。图像收稿日期:2013-09-20修回日期:2013-11-10 作者简介:雷铭哲(1977-),男,湖北咸宁人,硕士。研究方向:故障诊断系统。 49··
机器视觉之工业相机传统标定与自标定
机器视觉之工业相机传统标定与自标定机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以此重建和识别物体。而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到,这个过程被称为摄像机标定。 总的来说,工业相机的标定可以分为传统标定方法和自标定方法两大类。传统工业相机标定的基本方法是在一定的相机模型下,通过对特定标定参照物进行图像处理,并利用一系列数学变换公式计算及优化,来求取相机模型内部参数和外部参数。传统的工业标定方法按照标定参照物与算法思路可以分成若干类,如基于3D立体靶标的相机标定、基于2D平面靶标的相机标定、以及基于径向约束的相机标定等。 然而,该方法在场景未知和摄像机任意运动的一般情况下,其标定很难实现。20世纪90年代初,Faugeras,Luong,Maybank等人首次提出了摄像机自标定方法。这种自标定法利用摄像机本身参数之间的约束关系来标定,而与场景和摄像机的运动无关,不依赖于标定参照物,仅利用相机在运动过程中周围环境图像与图像之间的对应关系来对相机进行标定。目前已有的自标定技术大致可以分为基于主动视觉的摄像机自标定技术、直接求解Kruppa 方程的摄像机自标定方法、分层逐步标定法、基于二次曲面的自标定方法等几种。 相机自标定相对于传统方法有更好的灵活性和实用性,通过十多年的不懈努力,理论上的问题已基本解决,目前研究的重点是如何提高标定算法的鲁棒性以及如何很好地用这些理论来解决实际视觉问题。维视图像VS220双目立体视觉测量系统平台采用双相机或多相机对空间自由运动体的三维位置坐标及姿态进行高精度测量,高精度的标定模板、完善的摄像机标定数学模型对标靶特征点进行子像素检测,保证系统的标定精度,为系统的高精度测量提供保证。
工业机器人运动学标定及误差分析(精)
工业机器人运动学标定及误差分析 运动学标定是机器人离线编程技术实用化的关键技术之一,也是机器人学的重要内容,在机器人产业化的背景下有十分重要的理论和现实意义。机器人运动学标定以运动学建模为基础,几何误差参数辨识为目的,为机器人的误差补 偿提供依据。工业机器人在以示教方式工作时,以重复精度为主要指标;在以离 线编程方式工作时,主要工作指标变为绝对精度。但是,工业机器人重复精度较 高而绝对精度较低,难以满足离线编程工作时的精度,所以需要进行运动学标定 来提高其绝对精度。随着机器人离线编程系统的发展,工业机器人运动学标定日益重要。本文首先综合分析了工业机器人运动学标定的一些基本理论,为之后的运动学建模和标定提供理论基础。根据ABB IRB140机器人实际结构,本文建立 了D-H运动学模型,并讨论了机器人的正运动学问题和逆运动学问题的解;然后 指出了该模型在标定中存在的缺陷,结合一种修正后的D-H模型建立了本文用于标定的模型。并根据最终建立的运动学模型建立了机器人几何误差模型。本文 还在应用代数法求解机器人逆运动学问题的基础上,进行了应用径向基神经网络求解机器人逆解的研究。该方法结合机器人正运动学模型,以机器人正解为训练样本训练经遗传算法优化后的径向基神经网络(GA-RBF网络),实现从机器人工 作变量空间到关节变量空间的非线性映射,从而避免复杂的公式推导和计算。本文在讨论了两种构造机器人封闭运动链进行运动学标定的方法的基础上,提出了一种新的机器人运动学标定方法——虚拟封闭运动链标定法。并对该方法的原理、系统构成进行了详细的分析和说明。该方法通过一道激光束将末端位置误 差放大在观测平板上,能够获得更高精度的关节角的值,从而辨识出更为准确的 几何参数。为了验证本文提出的虚拟封闭运动链标定方法的有效性和稳定性,本文以ABB IRB140机器人为研究对象,利用有关数据进行了仿真分析,最终进行了标定试验,得出结论。 同主题文章 [1]. 王金友. 中国工业机器人还有机会吗?' [J]. 机器人技术与应用. 2005.(02) [2]. 李如松. 工业机器人的应用现状与展望' [J]. 组合机床与自动化加工技术. 1994.(04) [3]. 赖维德. 工业机器人知识讲座——第一讲什么是工业机器人' [J]. 机械工人.冷加工. 1995.(02) [4]. 世界工业机器人产业发展动向' [J]. 今日科技. 2001.(11) [5]. 人丁兴旺的机器人大家族' [J]. 网络科技时代(数字冲浪). 2002.(01)
三维重建综述
三维重建综述 三维重建方法大致分为两个部分1、基于结构光的(如杨宇师兄做的)2、基于图片的。这里主要对基于图片的三维重建的发展做一下总结。 基于图片的三维重建方法: 基于图片的三维重建方法又分为双目立体视觉;单目立体视觉。 A双目立体视觉: 这种方法使用两台摄像机从两个(通常是左右平行对齐的,也可以是上下竖直对齐的)视点观测同一物体,获取在物体不同视角下的感知图像,通过三角测量的方法将匹配点的视差信息转换为深度,一般的双目视觉方法都是利用对极几何将问题变换到欧式几何条件下,然后再使用三角测量的方法估计深度信息这种方法可以大致分为图像获取、摄像机标定、特征提取与匹配、摄像机校正、立体匹配和三维建模六个步骤。王涛的毕业论文就是做的这方面的工作。双目立体视觉法的优点是方法成熟,能够稳定地获得较好的重建效果,实际应用情况优于其他基于视觉的三维重建方法,也逐渐出现在一部分商业化产品上;不足的是运算量仍然偏大,而且在基线距离较大的情况下重建效果明显降低。 代表文章:AKIMOIO T Automatic creation of3D facial models1993 CHEN C L Visual binocular vison systems to solid model reconstruction 2007 B基于单目视觉的三维重建方法: 单目视觉方法是指使用一台摄像机进行三维重建的方法所使用的图像可以是单视点的单幅或多幅图像,也可以是多视点的多幅图像前者主要通过图像的二维特征推导出深度信息,这些二维特征包括明暗度、纹理、焦点、轮廓等,因此也被统称为恢复形状法(shape from X) 1、明暗度(shape from shading SFS) 通过分析图像中的明暗度信息,运用反射光照模型,恢复出物体表面法向量信息进行三维重建。SFS方法还要基于三个假设a、反射模型为朗伯特模型,即从各个角度观察,同一点的明暗度都相同的;b、光源为无限远处点光源;c、成像关系为正交投影。 提出:Horn shape from shading:a method for obtaining the shape of a smooth opaque object from one view1970(该篇文章被引用了376次) 发展:Vogel2008年提出了非朗伯特的SFS模型。 优势:可以从单幅图片中恢复出较精确的三维模型。 缺点:重建单纯依赖数学运算,由于对光照条件要求比较苛刻,需要精确知道光源的位置及方向等信息,使得明暗度法很难应用在室外场景等光线情况复杂的三维重建上。 2、光度立体视觉(photometric stereo) 该方法通过多个不共线的光源获得物体的多幅图像,再将不同图像的亮度方程联立,求解出物体表面法向量的方向,最终实现物体形状的恢复。 提出:Woodham对SFS进行改进(1980年):photometric method for determining surface orientation from multiple images(该文章被引用了891次) 发展:Noakes:非线性与噪声减除2003年; Horocitz:梯度场合控制点2004年; Tang:可信度传递与马尔科夫随机场2005年; Basri:光源条件未知情况下的三维重建2007年; Sun:非朗伯特2007年; Hernandez:彩色光线进行重建方法2007年;
工业相机标定深度解析
工业相机标定深度解析 机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到,这个过程被称为摄像机定标(或称为标定)。标定过程就是确定摄像机的几何和光学参数,以及摄像机相对于世界坐标系的方位。由于标定精度的大小,直接影响着计算机视觉(机器视觉)的精度。因此,只有做好了摄像机标定工作,后续工作才能正常展开,可以说,提高标定精度也是当前科研工作的重要方面。 摄像机通过成像透镜将三维场景投影到摄像机二维像平面上,这个投影可用成像变换(即摄像机成像模型)来描述。摄像机成像模型分为线形模型和非线性模型。针孔成像模型就属于线形摄像机模型,本文就讨论在这种模型下,某空间点与其图像投影点在各种坐标系下的变换关系。 总的来说,摄像机标定可以分为传统的摄像机标定方法和摄像机自标定方法两大类。传统摄像机标定的基本方法是在一定的摄像机模型下,通过对特定标定参照物进行图像处理,并利用一系列数学变换公式计算及优化,来求取摄像机模型内部参数和外部参数。然而,该方法在场景未知和摄像机任意运动的一般情况下,其标定很难实现。20世纪90年代初,Faugeras,Luong,Maybank等人首次提出了摄像机自标定方法。这种自标定法利用摄像机本身参数之间的约束关系来标定,而与场景和摄像机的运动无关,所以更为灵活。 一、传统标定方法 传统的摄像机标定方法按照标定参照物与算法思路可以分成若干类,如基于3D立体靶标的摄像机标定、基于2D平面靶标的摄像机标定、以及基于径向约束的摄像机标定等。维视图像公司的CCAS双目标定系统运用的就是传统标定方法。
某测量系统误差源分析及建模
龙源期刊网 https://www.360docs.net/doc/be4354974.html, 某测量系统误差源分析及建模 作者:赵建军姚刚王毅孙靖杰 来源:《现代电子技术》2014年第01期 摘要:测量系统是武器的重要信息源,其测量精度直接影响武器系统的射击精度。对某测量系统的误差源进行了分析,建立了系统误差模型,分析得出系统误差存在复杂的误差特性,并对某次校飞的方位角误差进行了分析。研究结果可为下一步的误差分析与处理提供支撑。 关键字:测量系统;误差源;误差模型;复杂误差特性 中图分类号: TN957?34; TP391 文献标识码: A 文章编号: 1004?373X(2014) 01?0038?03 0 引言 测量系统是武器系统的“眼睛”,高精度的测量可以保证武器系统得到的目标数据真实可靠,从而可以提高系统的命中概率。对测量系统的误差进行分析,得到影响测量精度的误差源,建立相应的系统误差模型,对误差的特性进行分析,根据分析结果可以采取相应的标校措施来提高测量系统的测量精度[1?2]。 1 测量系统的组成 某武器系统的跟踪测量方式可以分为雷达跟踪和光电跟踪。在武器系统中,跟踪雷达的工作方式为单脉冲,可以执行全天候的测量任务。当气象条件达到要求时,可用光电跟踪。它能在比较复杂的背景下,对分离视场内的运动目标实现自动跟踪。为了克服雷达在近距离跟踪状态下测量精度低的缺点,用电视跟踪代替雷达跟踪,测量近距离目标,避免了闪烁噪声给测量系统带来的误差[3]。 本文着重对测量系统中雷达模块的误差源进行分析。 2 误差分析及建模 脉冲雷达是采用测量脉冲电磁波往返时间延迟得到目标的距离信息,利用等信号法获得目标的方位和俯仰角数据。测量误差分为:系统误差、随机误差和粗大误差三类[4]。系统误差主要有零值误差、轴系误差、动态滞后误差和大气传播误差等。随机误差主要是测量过程中由于目标闪动造成的测量噪声,这些噪声大都符合“白过程”。粗大误差是由于设备工作异常或其他突变因素造成的。系统误差需要进行修正来消除,随机误差则可以通过平滑滤波来抑制,而粗大误差需要通过数据处理方法来剔除。雷达的测元包括距离、方位角和俯仰角,因其测量原
摄像机标定方法综述
摄像机标定方法综述 摘要:首先根据不同的分类方法对对摄像机标定方法进行分类,并对传统摄像机标定方法、摄像机自标定方法等各种方法进行了优缺点对比,最后就如何提高摄像机标定精度提出几种可行性方法。 关键字:摄像机标定,传统标定法,自标定法,主动视觉 引言 计算机视觉的研究目标是使计算机能通过二维图像认知三维环境,并从中获取需要的信息用于重建和识别物体。摄像机便是3D 空间和2D 图像之间的一种映射,其中两空间之间的相互关系是由摄像机的几何模型决定的,即通常所称的摄像机参数,是表征摄像机映射的具体性质的矩阵。求解这些参数的过程被称为摄像机标定[1]。近20 多年,摄像机标定已成为计算机视觉领域的研究热点之一,目前已广泛应用于三维测量、三维物体重建、机器导航、视觉监控、物体识别、工业检测、生物医学等诸多领域。 从定义上看,摄像机标定实质上是确定摄像机内外参数的一个过程,其中内部参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标、焦距、比例因子和镜头畸变等;而外部参数的标定是指确定摄像机坐标系相对于某一世界坐标系的三维位置和方向关系,可用3 ×3 的旋转矩阵R 和一个平移向量t 来表示。 摄像机标定起源于早前摄影测量中的镜头校正,对镜头校正的研究在十九世纪就已出现,二战后镜头校正成为研究的热点问题,一是因为二战中使用大量飞机,在作战考察中要进行大量的地图测绘和航空摄影,二是为满足三维测量需要立体测绘仪器开始出现,为了保证测量结果的精度足够高,就必须首先对校正相机镜头。在这期间,一些镜头像差的表达式陆续提出并被普遍认同和采用,建立起了较多的镜头像差模型,D.C.Brown等对此作出了较大贡献,包括推导了近焦距情况下给定位置处径向畸变的表达式及证明了近焦距情况下测得镜头两个位置处的径向畸变情况就可求得任意位置的径向畸变等[2]。这些径向与切向像差表达式正是后来各种摄像机标定非线性模型的基础。随着CCD器件的发展,现有的数码摄像机逐渐代替原有的照相机,同时随着像素等数字化概念的出现,在实际应用中,在参数表达式上采用这样的相对量单位会显得更加方便,摄像机标定一词也就代替了最初的镜头校正。
小杨说事-基于海康机器视觉算法平台的对位贴合项目个人理解
都说“纸上得来终觉浅,绝知此事要躬行”,可惜咱没这条件呀,没项目咱也不能干坐着呀,那咱发挥主观能动性,咱不是学机械的么,还好还记得一点CAD的知识,今天小杨说事,咱就“纸上谈兵”,用CAD结合公司的视觉算法平台VisionMaster来说说相机映射和对位贴合的事,如果有错误的地方,还请各位自动化前辈多多指教,毕竟网上的关于这个知识太少了。 实际的生产过程中,我们常常会碰到这样的情况,机械手从工位一吸着对象到工位二进行贴合,但是工位二我们不方便执行标定,通常的做法是在工位一执行一次标定流程,然后使用两点映射或者四点映射把工位二的相机坐标映射到工位一的相机一中。说起来很轻松,咱没实战过呀,但是咱可以模拟呀,说干就干,咱开始动手吧。 如上图所示,咱们为了验证一般性,把机械手坐标系,工位一的相机1坐标系,工位二的相机2坐标系画的夸张一些,但是在CAD图上我们是通过旋转的方式来改变两个相机的坐标系和机械手坐标系的夹角的,事先是知道相机1坐标系X轴和相机2坐标系X轴和机械手坐标系X轴的夹角分别是10°和45°。当然关于单像素精度,这里是采用一比一的方式,因为现实成像比这个更复杂,为了方便描述而已,不影响咱的用户体验。
现实场景中,咱一般碰到的都是机械手末端吸盘和末端中心不共轴的情况,那这边咱就选用最通用的12点标定来求出这个旋转中心,啥,你不知道什么是不共轴,啥是旋转中心,那你out了,赶紧看看这个博主的博客,人家讲的很详细,地址如下: https://https://www.360docs.net/doc/be4354974.html,/KayChanGEEK/article/details/73878994 看完了那咱继续,吸盘吸着带MARK点的标定板,在相机视野里面平移9次,旋转3次,当然尽量贴近实际对象所在的平面,移动范围尽量覆盖实际对象可能出现的范围。以X方向每次平移640.3044,Y方向每次平移389.3736,角度每次旋转30°,使用海康的算法平台呢,咱一般使用相对坐标系,尽量不使用绝对坐标系。咱一般是以平移的第5点作为基准哈,所以有了下图的12点的关系以及在CAD里面的坐标数据,机械手的绝对坐标是可以从机械手的示教器读出来的,相对坐标呢,都是相对第5点的坐标哈,至于像素坐标,这里咱取的是标定板上的那个圆Mark点的圆心,这个使用一个模板匹配,位置修正,圆查找工具就完事哈。 由于咱是使用的CAD模拟,那只能使用N点标定工具,手动输入啦,对应着输入就行啦,如下图:
检测复习题答案
现代检测技术基础试题 2010年11月 一、阐述仪器线性度的概念,说明有哪些直线拟合方法。阐述回程差、灵敏度和分辨力的概念。 答:仪器线性度指检测系统输入输出曲线与理想直线的偏离程度,亦称非线性误差。直线拟合方法有最小二乘法、端点连线法、最佳直线法。回程误差指检测系统在正行程和反行程的输入输出曲线不重合的程度,亦称空程误差、滞后。分辨力指能够检测出的被测量的最小变化量,表征测量系统的分辨能力。灵敏度指测量系统在稳态下输出量的增量与输入量的增量之比, 即。 二、仪表的精确度等级是怎样规定的?写出计算公式。某测温仪表的测温范围为0---600℃,准确度等级为2.5级;另一测温仪表的测温范围为0---1200℃,准确度等级为1.5级。现欲测量温度为500℃的设备温度,问选哪种测温仪表会更好?计算说明为什么? 答: 在工业实际中,为了表示测量结果的可靠程度, 引入了精确度(精度)等级规定, 用A表示,A值是指仪器在规定条件下, 其允许的最大绝对误差值△A与满量程输出YF.S之比的百分数, 即:,因而选第一种仪表。 三、(1)假设你开发一台称重仪,在实验室完成了传感器、放大电路和单片机系统的设计制作,但是没有条件施加标准砝码或标准力对传感器和你的系统进行实际标定,你只有一块可用来测量电压和电流的表(或万用表), 在这种条件下你应该首先对仪器的那些指标进行测定?从误差的角度出发,你对你使用的表有何要求? (2)设传感器误差为0.1%;测量放大电路误差为0.03%;系统采用的A/D转换器为10位,试分析仪器最后能达到的最好精度等级是多少? (P5-7) 答: A.可以对该称重仪的重复性、回程误差和零点漂移进行测定; ①零点漂移:输入为零时,输出偏离零值的变化。产生这种现象的原因是晶体三极管的参数受温度的影响、电源电压的波动以及运算放大器前后级的电位配合问题等。在多数放大器中,前级的零点漂移影响最大,级数越多和放大倍数越大,零点漂移越严重。解决措施是采用差动电路。 本称重仪零点漂移的标定只用万用表就可完成。称重仪上不加任何重量,用万用表测量其输出值。如果输出值为零,说明该称重仪没有零点漂移现象,输出值越大,零点漂移现象越严重。 ②重复性:在同一工作条件下,同一方向连续多次对同一输入值进行测量所得到的多个输出值之间互相不一致的程度。重复性是检测系统最基本的技术指标,是其他各项指标的前提和保证。对于称重仪来说,如果同一测量值,在不同时刻放上去测得的结果不一样或相差很大,显然不合要求。 对重复性的标定中,其输入值不需要是标准数值,只要多次重复测量的输入值相同即可。本称重仪重复性的标定,可用普通砝码(如果没有砝码,可用大小、重量合适的任何物体所代替)和万用表来完成。找一个大小合适的砝码,重复多次放上再取下,由万用表读出每次的输出数值,在95%概率水平内测量结果的最大差值即可用来判定该称重仪的重复性。注意,测量过程中要注意称重仪的量程,所加砝码不能超出量程范围。 ③回程误差:检测系统在正行程和反行程的输入输出曲线不重合的程度,亦称空程误差、滞后。仪表检测所得到的实际上升曲线和实际下降曲线出现不重合的情况,从而使仪表的特性曲线形成环状,称为“滞环”。上升曲线和下降曲线之间最大的差值,称为回差(也称为变差、来回变差)。产生原因是仪表内部的某些元件具有储能效应,例如弹性变形、磁滞现象等。对于称重仪,如果要测量出一定重量的物体,当物体重量超出要求值时,需要往回减少物体,这时由于回程误差的存在,就会引起很大的误差,显然不合乎要求。 回程误差的标定,其输入值不需要是标准数值,找一组砝码,标好记号,依次放在称重仪上,然后逆顺序依次取下,记录每次放上砝码后万用表的读数以及取下砝码后万用表的读数,绘出输入-输出曲线,上升和下降曲线不重合的程度即为回程误差,称其最大差值为回差。 ④再现性:仪表实际上升曲线和实际下降曲线之间离散程度的表示,常取两种曲线之间离散程度最大点的值来表示。称重仪如果存在再现性,同样重量的物体就可能会因为放取的方式或时间不一样而测得不同的结果。 再现性的标定,其输入值不需要是标准数值,找一组砝码,标好记号,依次放在称重仪上,然后逆顺序依次取下,记录每次放
机器视觉中的摄像机定标方法综述
机器视觉中的摄像机定标方法综述 吴文琪,孙增圻 (清华大学计算机系智能技术与系统国家重点实验室,北京100084) 摘要:回顾了机器视觉中的各种摄像机定标方法,对各种方法进行介绍、分析,并提出了定标方法的发展方向的新思路。 关键词:机器视觉;摄像机定标;三维重建;镜头畸变 中国法分类号:TP387文献标识码:A文章编号:1001-3695(2004)02-0004-03 Overvie w of Camera Calibration Methods for Machine Vision WU Wen-qi,SUN Zeng-qi (State Key L aborato ry o f Intellige nt Tec hnology&Syste ms,Dept.o f Co mpute r Science&Technology,Tsinghua Universit y,Bei jing100084,China) Abstract:In this paper,themethods for camera calibration are reviewed,anal yzed and compared.Furthermore,the develop ment of the camera calibration is discussed. Key w ords:Machine Vision;Camera Calibration;3D Reconstruction;Lens Distortion 1引言 在机器视觉的应用中,如基于地图生成的视觉、移动机器人的自定位、视觉伺服等的应用中,从二维图像信息推知三维世界物体的位姿信息是很重要的。目前已经出现了一些自定标和免定标的方法,这些方法在比较灵活的同时,尚不成熟[1],难以获得可靠的结果。通过摄像机的定标重建目标物三维世界目标物体仍然是重要的方法。 摄像机定标在机器视觉中决定: (1)内部参数给出摄像机的光学和几何学特性% %%焦距,比例因子和镜头畸变。 (2)外部参数给出摄像机坐标相对于世界坐标系的位置和方向,如旋转和平移。 在机器人的视觉应用中,目标物位姿信息获取通常有一定的精度要求,机器人视觉系统的性能很大程度上依赖于定标精度。 随着计算机性能的快速提高,低价位CCD摄像机的大量使用,计算机定标方法也得到了不断的改进。 2摄像机模型 摄像机的投影几何模型可以看作这样一个过程,把三维世界透视投影到一个球面(视球),然后把球面上影像投射到一个平面P,理想情况下,平面P关于光轴中心对称。从图像中心点出发到投射平面点的距离r(A)与光轴夹角A的关系有五种模型,每种都有其自己有用的特性[2]。 其成像简图如图1所示。 图1成像简图 2.1透视模型 透视模型公式为 r(A)=k tan A 理想状况下可以等价为小孔成像。许多最近的算法和判断不同算法的优劣的依据都是基于这个假设。但是,透视投影只是表示了视球的前半部。要是不在光轴的附近,物体的形状和密度都会发生畸变。这种模型符合人的视觉感受,理想情况下,直线投影仍为直线。透视模型在定标方法中被广泛采用,在视角不大的镜头情况下比较符合实际情况。 在视角比较大时,透视模型通过对镜头畸变进行校正来修正模型。根据镜头光学成像原理,畸变的模型为D x (x,y)=k1x(x2+y2)+(p1(3x2+y2)+2p2xy)+s1(x2+y2) D y (x,y)=k2x(x2+y2)+(p2(3x2+y2)+2p1xy)+s2(x2+y2) 式中,D x,D y是非线性畸变值,D x,D y的第一项称为径向畸 # 4 #计算机应用研究2004年 收稿日期:2002-11-18;修返日期:2003-03-22
设备标定误差的计算方法
设备标定误差的计算方法 设备标定完毕后,我们要验证其它测量点是否符合计量要求,常用到的一些指标比如示值误差、示值间差、示值重复性等,有些误差用到的是相对误差,需要计算,计算方法以称重台为例: 1、示值误差 以13吨称重台为例,一边最大称量是6500Kg,当载荷在小于等于650Kg时,最大允许误差是±13Kg(0.2%×6500),当载荷大于650Kg时,最大允许误差是±2%。比如加2000Kg的标准载荷,实际显示2030Kg,那么该称量点的示值误差是(2030-2000)÷2000×100%=1.5%,可看出该称量点示值误差小于最大允许误差,该称量点示值误差合格。 2、示值间差 同一载荷在左、右承载器示值间的差值不应大于该称量点最大允许误差大绝对值以13吨称重台为例,左、右板验证2000Kg的称量点,其最大允许误差绝对值是2%,如果左边实际测量值是1970,右板实际测量值是2030,两板的间差是60Kg,60÷2000×100%=3%,可看出虽然该称量点示值误差符合要求,但两板的示值间差不合格。 3、偏载 同一载荷在承载器不同位置示值间的差值应不大于该称量点最大允许误差绝对值的四分之一。 以13吨称重台为例,比如在左板四个角分别加100Kg重量,100Kg称量点最大允许误差绝对值是0.2%×6500=13Kg,13÷4=3.25Kg,即100Kg称量点偏载不能超过3Kg,就是四个角显示示值最大减最小差值不能大于3Kg。 4、重复性 同一载荷多次称量结果间的差值应不大于该称量点最大允许误差绝对值的二分之一。 以13吨称重台为例,比如加载2000Kg,重复性误差应是2000×2%÷2=20Kg,2000Kg称量点加载三次,三次测量值最大减最小大差值不能大于20Kg。 滚筒反力式制动台的示值误差不超过±3%,示值间差不超过3%,测量重复性不超过 2%,其计算方法都是一样的。滚筒反力式制动台还有空载动态零值误差的要求,应满足: FS≤1500daN:不超过±0.9%FS
Cognex康耐视相机操作使用说明方案
康耐视相机操作使用说明书 目录 一、康耐视相机具体设置 ......................................................................................... 错误!未指定书签。 1.1软件安装 ......................................................................................................... 错误!未指定书签。 1.2流程编辑 (3) 1.3C ODESYS通信注意事项 (6) 二、相机标定 (7) 2.1相机校准 (7) 2.2绝对坐标实现 (9) 2.3相对坐标实现 ................................................................................................. 错误!未指定书签。 三、示教器示例程序................................................................................................. 错误!未指定书签。 3.1绝对坐标实现范例 ......................................................................................... 错误!未指定书签。 3.2相对坐标实现范例 ......................................................................................... 错误!未指定书签。 四、CODESYS逻辑开发 ......................................................................................... 错误!未指定书签。 4.1S OCKET通信开发............................................................................................ 错误!未指定书签。 4.2外部点数据处理 ............................................................................................. 错误!未指定书签。 五、细节说明............................................................................................................. 错误!未指定书签。
基于OpenCV的摄像机标定的应用研究
38562009,30(16)计算机工程与设计Computer Engineering and Design 0引言 机器视觉的基本任务之一是从摄像机获取的图像信息出发计算三维空间中物体的几何信息,并由此重建和识别物体,而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到,这个过程称为摄像机标定(或定标)。标定过程就是确定摄像机的几何和光学参数,摄像机相对于世界坐标系的方位。标定精度的大小,直接影响着机器视觉的精度。迄今为止,对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决[1-5]。对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。 OpenCV是Intel公司资助的开源计算机视觉(open source computer vision)库,由一系列C函数和少量C++类构成,可实现图像处理和计算机视觉方面的很多通用算法。OpenCV有以下特点: (1)开放C源码; (2)基于Intel处理器指令集开发的优化代码; (3)统一的结构和功能定义; (4)强大的图像和矩阵运算能力; (5)方便灵活的用户接口; (6)同时支持Windows和Linux平台。 作为一个基本的计算机视觉、图像处理和模式识别的开源项目,OpenCV可以直接应用于很多领域,是二次开发的理想工具。目前,OpenCV的最新版本是2006年发布的OpenCV 1.0版,它加入了对GCC4.X和Visual https://www.360docs.net/doc/be4354974.html,2005的支持。 1摄像机标定原理 1.1世界、摄像机与图像坐标系 摄像机标定中有3个不同层次的坐标系统:世界坐标系、摄像机坐标系和图像坐标系(图像像素坐标系和图像物理坐标系)。 如图1所示,在图像上定义直角坐标系 开发与应用
相机标定程序
/*环境OpenCV2.3.1+visual studio2010 *calibdata.txt 保持标定图片的路径(根据实际设置) */ #include "stdafx.h" #include "cv.h" #include "highgui.h" #include
相机标定方法
摄像机标定的方法和具体的步骤 1.理想的摄像机成像模型 在不考虑畸变的情况下,建立如图所示的摄像机模型。 物体到图像之间的转化,经历了下面四个坐标系的转换: 1.三维世界坐标系 O X Y Z w w w w 这是基于不存在误差的基础上建立的坐标系,是一个理想的模型。这是后两个模型 的参考,可以作为对比的基础。 2.摄像机坐标系Oxyz 该坐标系的原点是摄像机的光心,CCD像平面到原点的距离为f,即理想成像系统 的有效焦距,坐标系的轴与光轴重合。 3.摄像机图像坐标系'O XY O,X轴、该二维坐标系定义在CCD像平面上,其中光轴与像平面的交点定义为原点' Y轴分别平行于x、y轴。 4.计算机像平面坐标系Ouv 在这一坐标系中,原点在图像的左上角。这是一个建立在CCD像平面中的二维坐标 系,u轴和v轴组成坐标系,前者为水平轴,后者为垂直轴,方向向右、向下。 上面我们讨论的四个坐标系中,只有最后一个坐标系的单位是像素。前三者的单位 都是毫米。 一被测点P,其三维坐标为(x,y,z) ,摄像机坐标系为(x,y,z),其经过拍摄后, w w w
在摄像机图像坐标系中的坐标为(X,Y),最后得到计算机像面坐标系的坐标(u,v),这四步的变换过程如下图所示: 一、刚体变换(从世界坐标系到摄像机坐标系) 在刚体变换过程中世界坐标系中的一点到摄像机坐标系中的点,可以由一个旋转矩阵R以及一个平移矩阵t来描述,则存在如下刚体变换公式: 其中R为3X3的旋转矩阵(),t是一个三维平移向量,化为其次坐标形式有:
二、透视投影(相机坐标系到理想图像物理坐标系) 根据针孔模型下透镜成像焦距f,物距u和相距v的关系,以及下图可得:(注意此时的点M是摄像机坐标系的点) y是理想图像物理坐标系坐标)将上面的关系式化成其次坐标式为:(注意:x, u u 三、畸变校正 在上面所有的坐标系公式推导的过程中,我们遵循的是线性摄像机模型,但是实际的摄像机由于镜头制作工艺等原因,使摄像机获取的原始图像是含有畸变的,畸变的图像的像点、投影中心、空间点不存在共线关系,所以如果要想直接运用线性模型来描述三维世界空间的点与像点之间的关系,必须先对畸变的图像进行校正。 畸变模型矫正公式为: y为针孔线性模型计算出来的图像点坐标的理想值,(x,y)是实际的图像点的坐(x,) u u
第六章 动态回归与误差修正模型
第6章 动态回归与误差修正模型 本章假定时间序列是平稳的。 6.1 均衡与误差修正机制 1 均衡 均衡指一种状态,达到均衡时将不存在破坏均衡的内在机制。这里只考虑平稳的均衡状态,即当系统受到干扰后会偏离均衡点,而内在均衡机制将努力使系统重新回到均衡状态。 下面通过一个例子说明系统均衡概念。以两个地区某种商品的价格为例,假设地区A 中该商品物价由于某种原因上升时,该商品就会通过批发商从价格低的B地区向价格高的A 地区流动。从而使批发商从中获利。这种活动将直接导致该商品在B地区的需求增加,从而使该商品在B地区的价格上涨。从A地区看,由于增加了该商品的供给,则导致价格下降,反之依然,从而使两各地区的该商品价格趋同。 若称价格A = 价格B的直线表示均衡价格。如上所述,当价格离开这条均衡价格直线后,市场机制这只无形之“手”就会把偏离均衡点的状态重新拉回到均衡状态。随着时间推移,无论价格怎样变化,两个地区的价格都具有向均衡价格调整的趋势。 若两个变量x t , y t永远处于均衡状态,则偏差为零。然而由于各种因素的影响,x t , y t并不是永远处于均衡位置上,从而使u t≠ 0,称u t为非均衡误差。当系统偏离均衡点时,平均来说,系统将在下一期移向均衡点。这是一个动态均衡过程。t期非均衡误差u t是y t下一期取值的重要解释变量。当u t > 0时,说明y t相对于x t取值高出均衡位置。平均来说,变量y t 在t+1期的取值y t+1将有所回落。所以,u t= f (y t , x t) 具有一种误差修正机制。 6.2 分布滞后模型 如果回归模型中不仅包括解释变量的本期值,而且包括解释变量的滞后(过去)值,则这种回归模型称为分布滞后模型。例 y t = α0 + ∑ =? n i i t i x β+ u t,u t~ IID (0, σ2 ) (6.1)
halcon单相机标定详细说明
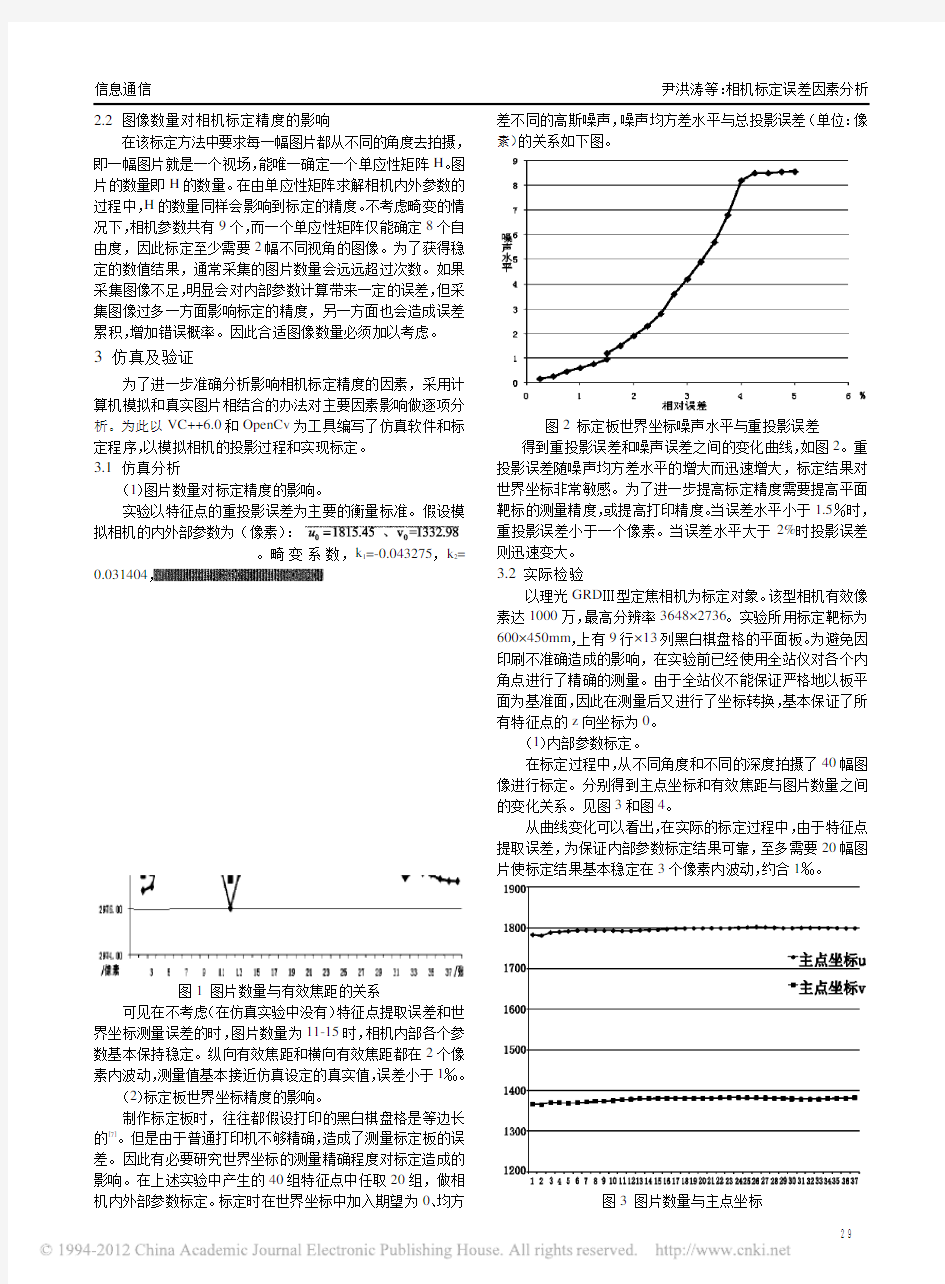
相机标定 1 相机标定基本原理 1.1 相机成像模型 目前大多数相机模型都是基于针孔成像原理建立的,因为针孔成像原理简单,并且能满足建模的要求。除此之外还有基于应用歪斜光线追踪法和近轴光线追踪法的成像模型[1]。针孔成像虽然已经展示出了相机的成像原理,但是由于针孔成像是理想的物理模型,没有考虑相机本身的尺寸、镜头与相机轴心的偏斜等因素的影响,因此精度很低,不能满足工业机器视觉的要求。为了使相机模型能高精度的反应相机的实际成像过程,需要再针孔成像模型的基础上考虑镜头畸变等的因素。 图1 针孔成像 基于针孔成像原理建立的相机的成像模型,如下图所示。在相机的成像模型中,包含有几个坐标系分别是世界坐标系、相机坐标系、图像坐标系,相机的成像过程的数学模型就是目标点在这几个坐标系中的转化过程。 图2 针孔成像模型 (1)世界坐标系(X w,Y w,Z w),就是现实坐标系,是实际物体在现实世界中的数学描述,是一个三维的坐标空间。 (2)摄像机坐标系(X c, Y c),以针孔相机模型的聚焦中心为原点,以摄像机光学轴线为Z c轴 (3)图像坐标系:分为图像像素坐标系和图像物理坐标系 为了便于数学描述将图像平面移动到针孔与世界坐标系之间。如下图所示。
图3 将相机平面移至针孔与目标物体之间后的模型 1.2 坐标系间转换 从世界坐标系到相机坐标系: P(X c ,Y c ,Z c )=R(α,β,γ)?P(X w ,Y w ,Z w )+T 每一个世界坐标的对象都可以通过旋转和平移转移到相机坐标系上。将目标点旋转θ角度,等价于将坐标系方向旋转θ。如下图所示,是二维坐标的旋转变换,对于三维坐标而言,旋转中绕某一个轴旋转,原理实际与二维坐标旋转相同。如果,世界坐标分别绕X ,Y 和Z 轴旋转α,β,γ,那么旋转矩阵分别为R (α),R (β),R (γ) 图4 坐标旋转原理 R (α)=[10 00cosα ?sinα0sinαcosα] (1-1) R (β)=[cosβ 0sinβ0 10?sinβ 0cosβ ] (1-2)