汽车尾灯控制系统电路设计毕业论文设计(经典)

1 引言
在日新月异的21世纪里,电子产品得到了迅速发展。许多电器设备都趋于人性化、智能化,这些电器设备大部分都含有CPU控制器或者是单片机。单片机以其高可靠性、高性价比、低电压、低功耗等一系列优点,近几年得到迅猛发展和大围推广,广泛应用于工业控制系统、通讯设备、日常消费类产品和玩具等。并且已经深入到工业生产的各个环节以及人民生活的各个方面,如车间流水线控制、自动化系统等、智能型家用电器(冰箱、空调、彩电)等。用单片机来控制的小型电器产品具有便携实用,操作简单的特点。
本文设计的汽车尾灯控制电路属于小型智能电子产品。利用单片机进行控制,实时时钟芯片进行记时,外加掉电存储电路和显示电路。此设计具有相当重要的现实意义和实用价值。
2 系统概述
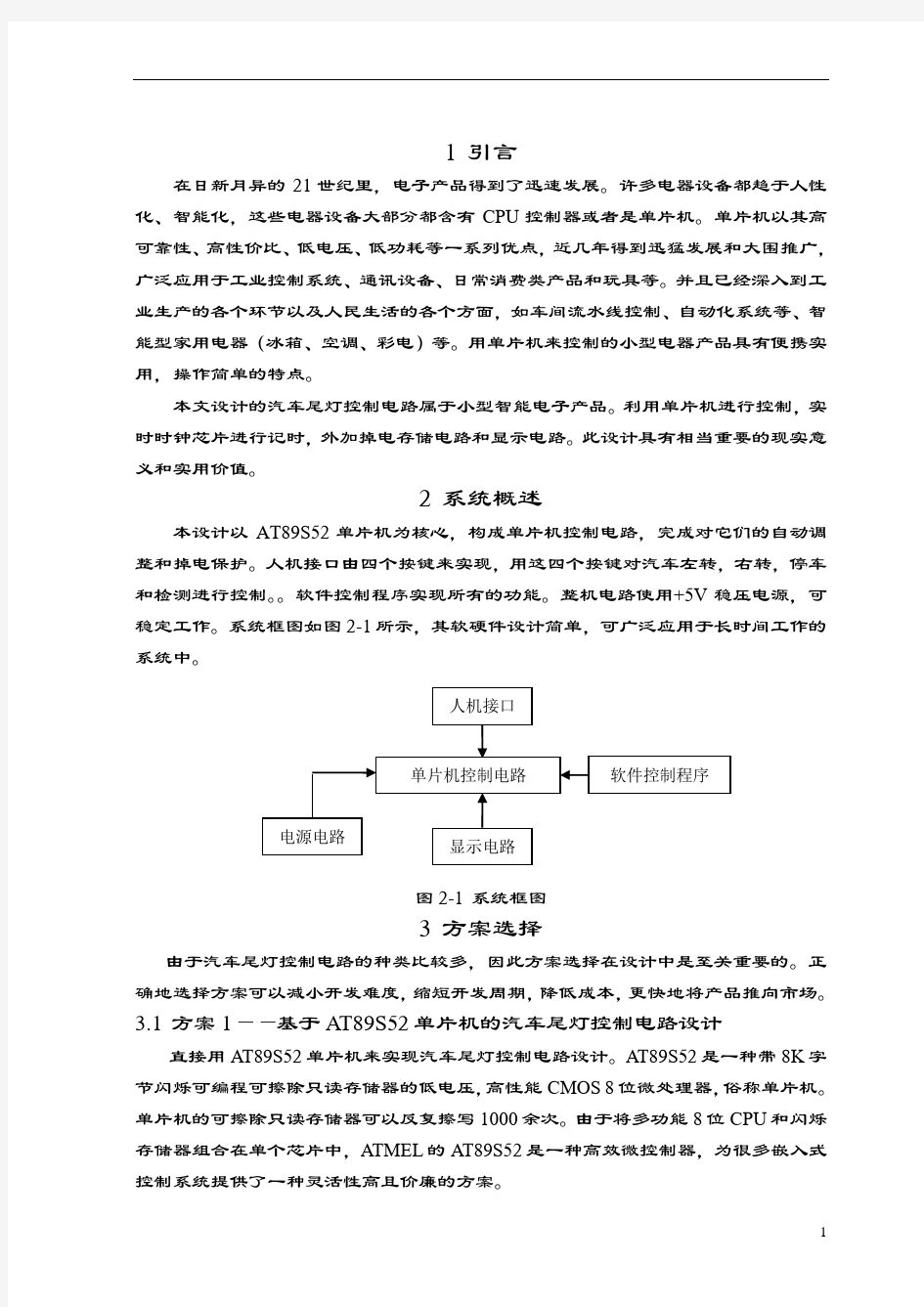
本设计以AT89S52单片机为核心,构成单片机控制电路,完成对它们的自动调整和掉电保护。人机接口由四个按键来实现,用这四个按键对汽车左转,右转,停车和检测进行控制。。软件控制程序实现所有的功能。整机电路使用+5V稳压电源,可稳定工作。系统框图如图2-1所示,其软硬件设计简单,可广泛应用于长时间工作的系统中。
图2-1 系统框图
3 方案选择
由于汽车尾灯控制电路的种类比较多,因此方案选择在设计中是至关重要的。正确地选择方案可以减小开发难度,缩短开发周期,降低成本,更快地将产品推向市场。
3.1 方案1——基于AT89S52单片机的汽车尾灯控制电路设计
直接用AT89S52单片机来实现汽车尾灯控制电路设计。AT89S52是一种带8K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器,俗称单片机。单片机的可擦除只读存储器可以反复擦写1000余次。由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89S52是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
用单片机来实现汽车尾灯控制电路设计,无须外接其他芯片,充分利用了单片机的资源。
3.2 方案2——基于电子元件的汽车尾灯控制电路设计
用电子元件接的汽车尾灯控制电路,电路复杂,接点较多,电路稳定性差。
汽车左右和刹车仿真电路
汽车尾灯控制电路设计总体框图
4 系统硬件电路的设计
按照系统设计功能的要求,初步确定设计系统由主控模块、键盘接口模块、显示模块共3个模块组成,电路系统构成框图如图4-1所示。主控芯片使用52系列AT89S52开关控制电路
译码电路74138
显示驱动电路
记数电路74161
R1R2R3 L1L2L3脉冲产生电路555
单片机,
图4-1 汽车尾灯控制电路系统构成框图
4.1 系统核心部分——闪电存储型器件AT89S52
4.1.1 AT89S52具有下列主要性能[5]:
·8KB 可改编程序Flash 存储器(可经受1000次的写入/擦除周期)
·全静态工作:0Hz ~24MHz
·三级程序存储器
·128×8字节部RAM
·32条可编程I/O 线
·2个16位定时器/计数器
·6个中断源
·可编程串行通道
·片时钟振荡器
4.1.2 AT89S52的引脚及功能
AT89S52单片机的管脚说明如图4-2所示。
P1.01
P1.12P1.23P1.34P1.45P1.56P1.67P1.78RST 9P3.0(RXD)10P3.1(TXD)11P3.2(INT0)12P3.3(INT1)13P3.4(T0)14P3.5(T1)15P3.6(WR)16P3.7(RD)17XTAL218XTAL119GND 20P2.0(A8)21
P2.1(A9)22
P2.2(A10)23
P2.3(A11)24
P2.4(A12)25
P2.5(A13)26
P2.6(A14)27
P2.7(A15)28
PSEN 29
ALE/PROG 30
EA/VPP 31
P0.7(AD7)32
P0.6(AD6)33
P0.5(AD5)34
P0.4(AD4)35
P0.3(AD3)36
P0.2(AD2)37
P0.1(AD1)38
P0.0(AD0)39
VCC 40
(89S52)
主控模块 时钟电路 键扫描电路
晶体管显示
存储电路
图4-2 AT89S52的管脚
(1) 主要电源引脚
①VCC 电源端
②GND 接地端
(2) 外接晶体引脚XTAL1和XTAL2
①XTAL1 接外部晶体的一个引脚。在单片机部,它是构成片振荡器的反相放大器的输入端。当采用外部振荡器时,该引脚接收振荡器的信号,既把此信号直接接到部时钟发生器的输入端。
②XTAL2 接外部晶体的另一个引脚。在单片机部,它是上述振荡器的反相放大器的输出端。采用外部振荡器时,此引脚应悬浮不连接。
(3) 控制或与其它电源复用引脚RST、ALE//PROG、/PSEN和/EA/VPP
①RST 复位输入端。当振荡器运行时,在该引脚上出现两个机器周期的高电平将使单片机复位。
②ALE//PROG 当访问外部存储器时,ALE(地址锁存允许)的输出用于锁存地址的低位字节。即使不访问外部存储器,ALE端仍以不变的频率(此频率为振荡器频率的1/6)周期性地出现正脉冲信号。因此,它可用作对外输出的时钟,或用于定时目的。然而要注意的是:每当访问外部数据存储器时,将跳过一个ALE脉冲。在对Flash存储器编程期间,该引脚还用于输入编程脉冲(/PROG)[6]。
③/PSEN 程序存储允许(/PSEN)输出是外部程序存储器的读选通信号。当AT89S52/LV52由外部程序存储器取指令(或常数)时,每个机器周期两次/PSEN有效(既输出2个脉冲)。但在此期间,每当访问外部数据存储器时,这两次有效的/PSEN 信号将不出现。
④/EA/VPP 外部访问允许端。要使CPU只访问外部程序存储器(地址为0000H~FFFFH),则/EA端必须保持低电平(接到GND端)。当/EA端保持高电平(接VSS 端)时,CPU则执行部程序存储器中的程序。
(4) 输入/输出引脚P0.0~P0.7、P1.0~P1.7、P2.0~P2.7 和P3.0~P3.7
①P0端口(P0.0~P0.7)P0是一个8位漏极开路型双向I/O端口。作为输出口用时,每位能以吸收电流的方式驱动8个TTL输入,对端口写1时,又可作高阻抗输入端
用。
②P1端口(P1.0~P1.7)P1是一个带有部上拉电阻的8位双向I/O端口。P1的输出缓冲器可驱动(吸收或输出电流方式)4个TTL输入。对端口写1时,通过部的上拉电阻把端口拉到高电位,这时可用作输入口。作输入口时,因为有部的上拉电阻,那些被外部信号拉低的引脚会输出一个电流。
③P2端口(P2.0~P2.7)P2是一个带有部上拉电阻的8位双向I/O端口。P2的输出缓冲器可驱动(吸收或输出电流方式)4个TTL输入。对端口写1时,通过部的上拉电阻把端口拉到高电位,这时可用作输入口。P2作输入口使用时,因为有部的上拉电阻,那些被外部信号拉低的引脚会输出一个电流。
④P3端口(P3.0~P3.7)P3口管脚是8个带部上拉电阻的双向I/O口,可接收输出4个TTL门电流。当P3口写入“1”后,它们被部上拉为高电平,并用作输入。作为输入,由于外部下拉为低电平,P3口将输出电流,这是由于上拉的缘故。
P3口也可作为AT89S52的一些特殊功能,这些特殊功能见表4-1[7]。
表4-1 P3端口的特殊功能
4.5 键盘电路
本设计共采用按键4个,分别与单片机的P2.0、P2.1、P2.2、P2.3口相连,分别对应汽车左转,汽车右转,刹车和检测的功能。
7 结论
本设计硬件电路较简单,所用器件较少,电路中使用了AT89S52单片主要芯片,实现了预计功能。
在对芯片的管脚功能和用法有充分的了解后,根据设计要求设计硬件电路,然后通过软件编程,用按键进行控制,用发光二极管进行显示。
汽车尾灯控制电路可以正常显示汽车的左转,右转,停车和检测功能,基本完成了预期要实现的目标。
参考文献
1.康华光主编,电子技术基础(数字部分),高等教育
2.标准集成电路数据手册TTL电路,电子工业
致
不知不觉,六周的毕业设计结束了。我的毕业论文已整理完毕,电路调试进展良好。毕业设计的完成意味着我的大学学习生活即将结束,从此我将进入一个新的人生旅途、开始一段崭新的生活——工作。在此,我衷心地感所有在我做毕业设计期间帮助过我的人。
首先我要感我的指导老师杰的大力帮助和支持。在整个设计过程当中,老师在大局上指导我毕业设计的每一进程,还在百忙中抽空为我答疑解难,帮我分析讲解毕业设计中所遇到的问题。不仅如此,老师还无私的给我提供了丰富的学习资源和良好的学习环境,为我的毕业设计带来了很大方便。同时在我完成毕业设计的过程中提供了很多指导性的意见,使我受益匪浅。另外,老师渊博的学识、严谨的治学态度和为人给了我很大的教育,这些将使我终身受益。在此,我衷心感老师给予我的帮助和教育。
此外,我还要感夏九和同学给予我的无私的帮助,他们在程序编写和调试过程中给予了我莫大的帮助。在此,我真诚地感他们。
最后,我要感我的母校——工程师学院,在校期间,这里给我留下了美好的回忆。特别是在我即将踏上工作岗位的同时,毕业设计整个过程给了我这样一个锻炼的机会,使我加深了对以前知识的理解和巩固,拓宽了知识面,也提高了我对所学知识的综合应用能力。我要对母校说:母校有我三五载,我爱母校一万年。祝愿母校的将来更美好!
附录1:汽车尾灯控制电路设计电路原理图
附录2 主程序
org 00h
ajmp start
ORG 001BH ;定时器T1中断程序入口
LJMP time1 ;跳至INTT1执行
org 0030h
start: mov TMOD,#10h
mov IE,#88h
MOV TH1,#00h
MOV TL1,#00h
mov r7,#03h;
setb TR1
turn: jnb p2.0,is_key
jnb p2.1,is_key
jnb p2.3,is_key
orl p1,#0ffh;
is_key : jb p2.3,no_check;
anl p1,#0c0h;
jmp turn
no_check:
jmp turn
time1: push acc
mov TH1,#010h
mov TL1,#00h
jb p2.0,left
djnz r7,return
mov r7,#3
xrl p1,#3fh
left: jb p2.1,right
dec r7;
mov p1,#0fbh next1: cjne r7,#3,next2;
mov p1,#0fdh; next2: cjne r7,#0,right;
mov p1,#0feh
mov r7,#9;
right: jb p2.2,return
dec r7;
cjne r7,#6,next11;
mov p1,#0f7h next11: cjne r7,#3,next21;
mov p1,#0efh; next21: cjne r7,#0,return;
mov p1,#0dfh
mov r7,#9;
return: pop acc
reti
end
英文资料及中文翻译
6 TRANSMISSIONS OF DIGITAL DATA:
INTERFACES AND MODEMS
(From Introduction to Data Communications and Net Working,
Behrouz Forouzan)
Once we have encoder our information into a format that can be transmitted, the next step is to investigate the transmission process itself. Information-processing equipment such as PCs generate encoded signals but ordinarily require assistance to transmit those signals over a communication link. For example, a PC generates a digital signal but needs an additional device to modulate a carrier frequency before it is sent over a telephone line. How do we relay encoded data from the generating device to the next device in the process? The answer is a bundle of wires, a sort of mini communication link, called an interface.
Because an interface links two devices not necessarily made by the same manufacturer, its characteristics must be defined and standards must be established. Characteristics of an interface include its mechanical specifications (how many wires are used to transport the signal); its electrical specifications (the frequency, amplitude, and phase of the expected signal); and its functional specifications (if multiple wires are used, what does each one do?). These characteristics are all described by several popular standards and are incorporated in the physical layer of the OSI model.
6.1 DIGITAL DATA TRANSMISSION
Of primary concern when considering the transmission of data from one device to another is the wiring. And of primary concern when considering the wiring is the data stream. Do we send one bit at a time, or do we group bits into larger groups and, if so, how? The transmission of binary data across a link can be accomplished either in parallel mode or serial mode. In parallel mode, multiple bits are sent with each clock pulse. In serial mode, one bit is sent with each clock pulse. While there is only one way to send parallel data, there are two subclasses of serial transmission: synchronous and asynchronous (see Figure 6-1). Parallel Transmission
Binary data, consisting of 1s and 0s, may be organized into groups of n bits each. Computers produce and consume data in groups of bits much as we conceive of and use spoken language in the form of words rather than letters. By grouping, we can send data n bits at a time instead of one. This is called parallel transmission.
The mechanism for parallel transmission is a conceptually simple one: use n wires to send n bits at one time. That way each bit has its own wire, and all n bits of one group can be transmitted with each clock pulse from one device to another. Figure 6-2 shows how parallel transmission works for n=8.Typically the eight wires are bundled in a cable with a connector at each end.
Figure 6-2Parallel transmission
The advantage of parallel transmission is speed. All else being equal, parallel transmission can increase the transfer speed by a factor of n over serial transmission. But there is a significant disadvantage:
cost. Parallel transmission requires n communication lines (wires in the example) just to transmit the data stream. Because this is expensive, parallel transmission is usually limited to short distances, up to a maximum of say 25 feet.
Serial Transmission
In serial transmission one bit follows another, so we need only one communication channel rather than n to transmit data between two communicating devices .
The advantage of serial over parallel transmission is that with only one communication channel, serial transmission reduces the cost of transmission over parallel by roughly a
factor of n.
Since communication within devices is parallel, conversion devices are required at the interface between the sender and the line (parallel-to-parallel).
Serial transmission occurs in one of two ways: asynchronous or synchronous. Asynchronous Transmission
Asynchronous transmission is so named because the timing of a signal is unimportant. Instead, information is received and translated by agreed-upon patterns. As long as those patterns are followed, the receiving device can retrieve the information without regard to the rhythm in which it is sent. Patterns are based on grouping the bit stream into bytes. Each group, usually eight bits, is sent along the link as a unit. The sending system handles each group independently, relaying it to the link whenever ready, without regard to a timer.
Without a synchronizing pulse, the receiver cannot use timing to predict when the next group will arrive. To alert the receiver to the arrival of a new group, therefore, an extra bit is added to the beginning of each byte. This bit, usually a 0, is called the start bit. To let the receiver know that the byte is finished, one or more additional bits are appended to the end of the byte. These bits, usually 1s, are called stop bits. By this method, each byte is increased in size to at least 10 bits, of which 8 are information and 2 or more are signals to the receiver. In addition, the transmission of each byte may then be followed by a gap of varying duration. This gap can be represented either by an idle channel or by a stream of additional stop bits.
In asynchronous transmission we send one start bit (0) at the beginning and one or more stop bits (1s) at the end of each byte. There may be a gap between each byte.
The start and stop bits and the gap alert the receiver to the beginning and end of each byte and allow it to synchronize with the data stream. This mechanism is called asynchronous because, at the byte level, sender and receiver do not have to be synchronized. But within each byte, the receiver must still be synchronized with the incoming bit stream. This is, some synchronization is required, but only for the duration of a single byte. The receiving device resynchronizes at the onset of each new byte. When the receiver detects a start bit, it sets a timer and begins counting bits as they come in. after n bits the receiver looks for a stop bit. As soon as it detects the stop bit, it ignores any received pulses until it detects the next start bit.
Asynchronous here means “asynchronous at the byte level,”but the bits are still synchronized; their durations are the same.
The addition of stop and start bits and the insertion of gaps into the bit stream make asynchronous transmission slower than forms of transmission that can operate without the
addition of control information. But it is cheap and effective, two advantages that make it an attractive choice for situations like low-speed communication. For example, the connection of a terminal to a computer is a natural application for asynchronous transmission. A user types only one character at a time, types extremely slowly in data processing terms, and leaves unpredictable gaps of time between each character.
Synchronous Transmission
In synchronous transmission, the bit stream is combined into longer “frames,”which may contain multiple bytes. Each byte, however, is introduced onto the transmission link without a gap between it and the next one. It is left to the receiver to separate the bit stream into bytes for decoding purposes. In other words, data are transmitted as an unbroken string of 1s and 0s, and the receiver separates that string into the bytes, or characters, it needs to reconstruct the information.
In synchronous transmission we send bits one after another without start/stop bits or gaps. It is the responsibility of the receiver to group the bits.
Without gaps and start/stop bits, there is no built-in mechanism to help the receiving device adjust its bit synchronization in midstream. Timing becomes very important, therefore, because the accuracy of the received information is completely dependent on the ability of the receiving device to keep an accurate count of the bits as they come in.
The advantage of synchronous transmission is speed. With no extra bits or gaps to introduce at the sending end and remove at the receiving end and, by extension, with fewer bits to move across the link, synchronous transmission is faster than asynchronous transmission is faster than asynchronous transmission. For this reason, it is more useful for high-speed applications like the transmission of data from one computer to another. Byte synchronization is accomplished in the data link layer.
6.2 DTE-DCE INTERFAC
At this point we must clarify two terms important to computer networking: data terminal equipment (DTE). There are usually four basic functional units involved in the communication of data: a DTE and DCE on one end and a DCE and DTE on the other end. The DTE generates the data and passes them, along with any necessary control characters, to a DCE. The DCE does the job of converting the signal to a format appropriate to the transmission medium and introducing it onto the network link. When the signal arrives at the receiving end, this process is reversed.
Data Terminal Equipment (DTE)
Data terminal equipment (DTE) includes any unit that functions either as a source of or
as a destination for binary digital data. At the physical layer, if can be a terminal, microcomputer, computer, printer, fax machine, or any other device that generates or consumes digital data. DTEs do not often communicate directly with one another, they generate and consume information but need an intermediary to be able to communicate. Think of a DTE as operating the way your brain does when you talk. Let’s say you have an idea that you want to communicate to a friend. Your brain creates the idea but cannot transmit that idea to your friend’s brain by itself. Unfortunately or fortunately, we are not a species of mind readers. Instead, your brain passes the idea to your vocal chords and mouth, which convert it to sound waves that can travel through the air or over a telephone line to your friend’s ear and from there to his or her brain, where it is converted back into information. In this model, your brain and your friend’s brain are DTEs. Your vocal chords and mouth are your DCE. His or her ear is also a DCE. The air or telephone wire is your transmission medium.
A DTE is any device that is a source of or destination for binary digital data.
Data Circuit-Terminating Equipment (DCE)
Data circuit-terminating equipment (DCE) includes any functional unit that transmits or receives data in the form of an analog or digital signal through a network. At the physical layer, a DCE takes data generated by a DTE, converts them to an appropriate signal, and then introduces the signal onto the telecommunication link. Commonly used DCEs at this layer include modems . In any network, a DTE generates digital data and passes it to a DCE; the DCE converts the data to a form acceptable to the transmission medium and sends the converted signal to another DCE on the network. The second DCE takes the signal off the line, converts it to a form usable by its DTE, and delivers it. To make this communication possible, both the sending and receiving DCEs must use the same encoding method, much the way that if you want to communicate to someone who understands only Japanese, you must speak Japanese. The two DTEs do not need to be coordinated with each other, but each of them must be coordinated with its own DCE and the DCEs must be coordinated so that data translation occurs without loss of integrity.
A DCE is any device that transmits or receives data in the form of an analog or digital signal through a network.
6 数字数据传输:接口和调制解调器
(选自?数据通信与网络?,Behrouz Forouzan著)
我们将信息编码成可以传输的格式,下一步就是探讨传输过程了。信息处理设备如个人计算机能生成编码信号,通常还需要其它设备协助才能将这些信号在通信链路上传输。例如一台PC机产生数字信号,在将信号通过线发送之前,还需要一台附加设备来调制载波频率。在这过程中,我们怎样才能把数据从产生它的设备传送到下一个设备呢?解决办法是使用一捆导线,成为一种为通信链路,或叫接口。
因为接口连接的两个设备有可能不是一个厂家生产的,所以必须规定接口的特性并建立标准。接口特性包括机械规(使用多少条导线来传输信号)、电气规(预期信号的频率、振幅和相位)以及功能规(如果使用多条导线,每条导线的功能是什么?)。这些特性在一些常用标准中都有描述并且被集成到了OSI7层模型的物理层中。
6.1数字数据传输
从一个设备向另一个设备发送数据主要考虑的是配线方式。对于配线问题主要考虑的因素是数据流。我们是否一次只发送一个比特,或是将比特成组发送以及如何成组?通过链路传输二进制数据可以采用并行模式或串行模式。在并行模式中,在每个时钟脉冲到来时多个比特被同时发送。在串行模式中,每个时钟脉冲只发送一个比特。尽管只有一种发送并行数据的方法,串行传输却有两个子类:同步方式和异步方式(参见图
图6-1 数据传输
6.1.1 并行传输
由0和1组成的二进制值可以组成n比特的位组。计算机使用和生成以比特为单位的数据,就像我们在英语会话时用词而不是一个个的字母来交流一样。通过分组,我们可以一次发送n个比特而不是一个比特。这称为并行传输。
从概念上说,并行传输的机制很简单:一次使用n条导线来传输n个比特。这种方式下,每个比特都使用专门的线路,而一组中的n个比特就可以在每个时钟脉冲从一个设备传输到另一个设备。图6-2显示了n=8时并行传输的工作状况。通常八根导线被捆成一根电缆,两端都有连接头。
并行传输的优势在于速度。当其它因素相同时,并行传输将比串行传输的速度快n倍,但同时也存在一个严重缺点:费用高。为进行数据传输,并行传输需要n条通信线路(本例中是导线)。因为如此昂贵,所以并行传输通常被限制在最长25英尺的距离。
6.1.2 串行传输
在串行传输中,比特是一个一个一次发送的,因此在两个通信设备之间传输数据只要一条通信通道,而不是n条。
串行传输相对于并行传输的优点是:因为只需要一条通信信道,串行传输的的费用大约只是并行传输的n分之一。
因为在设备部的传输是并行的,所以在发送端和线路之间以及接收端和线路之间的接口上,都需要有转换器(前者是并/串转换,后者是串/并转换)。
串行传输以两种方式进行:同步方式和异步方式。
(1) 异步传输
如果在传输号的时序并不重要,我们就将这种传输称为异步传输。它与同步方式不同的事,信息是以一种约定的模式来被接收和翻译的。只要遵照约定模式,接收设备就可以以不理会信息发送的节奏而能正确获取信息。约定模式是基于将比特组成字节。每一组比特(通常为八个)作为一个单位通过链路传输。发送端系统单独处理每个组,每处理完一个组就将其转发到链路上,并不理会时钟信号。
因为没有同步脉冲,接收方步可能通过及是方式来预测下一组比特何时到达。因而,为了通知接收方有新的比特组到达,在每字节的开头都要附加一个比特。这个比特,通常是0,被称为起始位。为了让接收方知道一个字节已经结束,在每字节尾部还要加上一个或多个比特。这些比特,通常是1,被称为停止位。利用以上的方法,每字节的大小至少增加到了10个比特,其中有8比特的信息在加上2个或更多的提示接收方的信号。另外,每发送完一个字节,可能还要跟上一段可变长的时间间隙。这段间隙或者通过信道控闲状态代表,或者通过附加的停止比特流代表。
在异步传输中,需要在每字节开始时发送一个起始位(0),然后在结束时发送一个或多个停止位(1)。在字节之间可以插入间隙。
起始位、停止位和间隙将一个字节的起始和终止提示给接收放,使得接收方可以根据数据流进行同步。因为在字节这一级别,发送方和接收方不需要进行同步,所以这种传输方式称为异步传输。但是在每一字节,接受方仍要根据比特流来进行同步。也就是说,一定程度上的同步还是存在的,但仅仅局限在一个字节的时间。在每一个字节的开始,接收端设备就进行重同步。当接收方检测到一个起始位后,就启动一个时钟,并随着到来的比特开始记数。在接受完n个比特后,接受方就等待停止位到达。当检测到停止位到达时,接受方在下一个起始位到达前忽略接收的所有信号。
异步传输意味着在字节级别以异步方式进行,但是每比特仍需要同步,他们的时延是一致的。
相对于不需要控制信息的传输方式,异步传输由于加入了起始位、停止位以及比特流间插入了间隙而显得慢一些。但是这种方式既便宜又有效,这两大优点使得在低速通信这一类情形下异步传输方式显得很有吸引力。例如,一台终端到计算机的连接很自然就是一种异步传输的应用实例。用户一次只敲一个字符,这在数据通信领域是十分低速的,同时还在字符之间引入了不可预计长短的时间间隙。
(2) 同步传输
在同步传输中,比特流被组装成更长的“帧”,一帧包含有许多个字节。与异步方式不同的是,引入帧的字节与字节之间没有间隙,需要接收方在解码时将比特流分解成字节。也就是说,数据被当作不简短的0、1比特流传输,而接收方来将比特流分割成重建信息所需的一个个字节。
在同步传输中,不插入起始/停止比特或间隙就将比特依次发送出去,完全有接收方负责重组比特。
因为没有间隙和起始/停止位,就没有勒比特流部的同步机制可以帮助接收端设备在处理比特流时调整比特同步。因为所接收数据的准备性完全依赖于接收端设备根据比特到达进行精确的比特计数的能力,所以时序变得十分重要。
同步传输的优点是速度快。因为在发送端不需要插入附加的比特和间隙,再接收端也不需要去掉这些比特和间隙,因而在传输方式在类似计算几件数据串是这样的高速应用中更有效。字节同步在数据链路层实现。
6.2 数据终端设备和数据电路中接设备接口
在这里必须首先分清计算机网络中的两个重要概念:数据终端设备(DTE)和数据电路终结设备(DCE)。在数据通信中经常涉及到四个基本功能单元:两端各有一个DTE和一个DCE。数据终端设备(DCE)将信号转换成适用于传输介质的形式并将它发送到网络链路中。当信号到达另一端时,相反的过程将发生。
6.2.1 数据终端设备
数据终端设备(DTE)包括所有具有作为二进制数字数据源点或终点能力的单元。在物理层,这可以是一台终端、一台小型计算机、计算机、打印机、传真机或是任何
产生和处理数据的设备。数据终端设备之间并不经常直接通信,他们产生或处理数据,然而通信需要一种能够用于传输的中间形式。可以把DTE的工作方式想象成当你说话时大脑的工作。比如说你有一个想法要与朋友交流,你的大脑产生了这个想法但并不能将它直接传送到你的朋友的大脑中。由幸或者说不幸的是,我们都不是头脑阅读者。相反,你的大脑将想法传送给你的声带和嘴,让他们将想法转换成声波通过空气或是线传输到你朋友的耳朵,并由此进入他的大脑。在对方的大脑中,声波信号被还原成信息。通过这种方式,你和你朋友的大脑就像DTE一样。你的声带和嘴是DCE,你朋友的耳朵也是DCE。空气或线就是你们之间的传输媒介。
一个数据终端设备(DTE)就是可作为二进制数字数据来源和终点的任何设备。
6.2.2 数据电路终接设备
任何能够通过网络发送和接收模拟或数字形式数据的功能单元都是数据电路终接设备(DCE)。在物理层,一个数据电路终接设备(DCE)接收从数据终端设备(DTE)中产生的数据,将她们转换为相应信号,然后将这些信号发送到传输链路上。在这一层中常用的DCE设备由调制解调器。在任何一个网络中,一个DTE设备产生数字数据并将它传送到DCE设备,DCE设备将这些数据转化可以在传输媒体上传送的格式并将转化后的信号发送给网络上另一个DCE设备。第二个DCE设备从线路上接收信号,将信号转化为与它相连的DTE设备可用的格式,然后转发信息。为实现这一通信,发送和接收的DCE设备必须采用一样的编码技术(例如,频移键控(FSK)编码)。这就像如果你想要和一个只懂日语的人交流,你就必须说日语一样。两个DTE 设备不需要互相协调,但是每个DTE设备必须与它连接的DCE设备协调工作。而DCE设备之间必须协调工作,才能实现完整的数据翻译过程。
通过网络,能够传送和接收模拟或数字数据的任何功能单元都叫数据电路终接设备(DCE)。
基于单片机-AT89C51-的汽车尾灯控制电路课程设计
物理与电子信息系 课程设计报告 课程名称:单片机课程设计 题目:汽车尾灯的设计 学生姓名:李海标学号:11409321 学生姓名:唐凯学号:11409310 系部:物理与电子信息系 专业年级:电子信息工程专业2011级指导教师:余胜 职称:副教授 湖南人文科技学院物理与电子信息系制
目录 摘要.................................................................................................................................. - 1 - 1、设计课题任务、功能要求说明及总体方案介绍................................................................ - 2 - 1.1设计课题任务............................................................................................................... - 2 - 1.2功能要求说明............................................................................................................... - 2 - 1.3设计课题总体方案介绍及工作原理说明................................................................... - 2 - 1.3.1汽车尾灯的设计思路与频率计算................................................................... - 2 - 1.3.2AT89C51芯片介绍....................................................................................... - 3 - 2、设计课题硬件系统的设计.................................................................................................... - 6 - 2.1设计课题硬件系统各模块功能简要介绍................................................................... - 6 - 2.1.1复位电路........................................................................................................... - 6 - 2.1.2时钟振荡电路................................................................................................... - 7 - 2.1.3独立键盘电路................................................................................................... - 7 - 2.1.4 LED显示电路................................................................................................. - 8 - 2.2设计课题电路原理图、PCB 图、元器件清单.......................................................... - 9 - 2.2.1 原理图............................................................................................................ - 9 - 2.2.2 PCB图........................................................................................................... - 9 - 2.2.3 仿真图............................................................................................................ - 9 - 2.2.4 元器件清单.................................................................................................... - 9 - 3、设计课题软件系统的设计.................................................................................................... - 9 - 3.1设计课题使用单片机资源的情况............................................................................... - 9 - 3.1.1 键盘设定........................................................................................................ - 9 - 3.1.2 发光二级管显示设定.................................................................................. - 10 - 3.2设计课题软件系统程序流程框图............................................................................. - 10 - 3.2.1 主程序流程图................................................................................................ - 10 - 3.2.2键扫程序流程图............................................................................................. - 10 - 3.2.3延时程序流程图............................................................................................. - 11 - 3.2.4 显示程序流程图............................................................................................ - 12 - 3.3设计课题软件系统程序清单..................................................................................... - 13 - 4、仿真结果与误差分析 ......................................................................................................... - 14 - 4.1汽车尾灯控制电路的使用说明................................................................................. - 14 - 4.2汽车尾灯控制仿真结果............................................................................................. - 14 - 4.3硬件调试 .................................................................................................................... - 15 - 4.4设计体会 .................................................................................................................... - 15 - 致谢 ....................................................................................................................................... - 16 - 参考文献 ................................................................................................................................... - 17 - 附录 ....................................................................................................................................... - 18 - 一、原理图........................................................................................................................ - 19 - 二、PCB图 ........................................................................................................................ - 19 - 三、仿真电路图................................................................................................................ - 20 - 四、设计课题元器件清单................................................................................................ - 20 - 五、程序清单.................................................................................................................... - 22 -
汽车尾灯控制电路设计
电子技术综合实验2 (开放型实验) 实验指导书 南昌航空大学信息工程学院电工电子教研室 2009年8月
实验一汽车尾灯控制电路设计 一、设计型实验的目的与任务 实验目的:使学生熟悉和掌握实际电子技术应用所需要的完整流程,即电路原理图设计、电路性能仿真与测试、电路板的制作、硬件电路的调试这一整套技能。 实验任务:在计算机上绘制电路原理图,完成设计电路的软仿真。在电子技术实验箱上搭建实物电路,并完成硬件电路的调试。观察实验现象,写出实验报告。 二、设计要求 假设汽车尾部左右两侧各有3个指示灯(可用试验箱上的电平指示二极管模拟) 1、汽车正常运行时指示灯全灭 2、右转弯时,右侧3个指示灯按右循环顺序点亮 3、左转弯时左侧3个指示灯按左循环顺序点亮 4、临时刹车时所有指示灯同时闪烁 三、设计内容 1、列出尾灯与汽车运行状态表,如表1-1所示 表1-1 2、设计总体框图 由于汽车左右转弯时,三个指示灯循环点亮,所以用三进制计数器控制译码器电路顺序输出低电平,从而控制尾灯按要求点亮。由此得出每种运行状态下,个指示灯与各给定条件(S1、S0、CP、Q1、Q0 )的关系,即逻辑功能表如表1-2所示(表中0表示灯灭状态,1表示灯亮状态),由表1-2可得出总体框图,如图1-1所示。 表1-2
图1-1 3、设计单元电路 三进制计数器电路。由双JK 触发器74LS76构成,可根据表1-2进行设计。汽车尾灯电路。其显示驱动电路由6个发光二极管和6个反相器构成。译码电路由三线译码器74LS138和6个与非门构成。74LS138的三输入端A2、A1、A0分别按Q1、Q0,而Q1Q0是三进制计数器的输出端 Y 0,Y 1,Y 2,依次为0有效(Y 3,Y 4,Y 5的符号为“1”无效),即反相器G1~G3的输出端也依次为0,故指示灯D1→D2→D3顺序点亮,示意汽车右转弯。若上述条件不变,而S1=1,则74LS138对应的输出端Y 4,Y 5,Y 6依次为0有效,即反相器G4~G6的输出端也依次为0,故指示灯D4→D5→D6顺序点亮,示意汽车左转弯。当G=0,A=1时,74LS138的输出端全为1,G6~G1的输出端也全为1,指示灯全灭:当G=0,A=CP 时,指示灯随CP 的频率闪烁。 开关控制电路。设73LS138和显示驱动电路的使能端信号分别为G 和A ,根据总体功能表分析及组合得G 、A 与给定条件(S1、S0、CP )的真值表,如表1-3所示,真值表经过整理得逻辑表达式为 10 G S S =⊕ 10101010A S S S S CP S S S S CP =+=? 表3-3 4、设计汽车尾灯总体参考电路 由步骤3可得出汽车尾灯总体电路(参考),如图1-2所示
汽车车灯控制电路
课程设计说明书 课程设计名称:电子技术课程设计 题目:汽车车灯控制电路 学生姓名:杰 成绩
专业:电气工程及其自动化学号:20 指导教师:吴昌东 日期:2016年7 月1日
汽车车灯控制电路 摘要:本方案设计了一个“汽车车灯控制电路”。“汽车车灯控制电路”作为电子技术基础课程的一个实践,采用74LS138译码器控制输出实现对六盏指示灯的控制,并配合74LS76JK触发器实现三进制循环计数器控制,即可轻易实现汽车正常运行和刹车的情况模拟。为实现汽车左右转弯时车灯循环闪烁的功能,需要配合74LS138译码器的另一输入S1即可实现。定时脉冲源部分由555定时器组成的多谐振荡器电路实现。 关键词:汽车;指示灯,74LS138,555定时器 Abstract: The design of this project is a " Automobile lamp control circuit", as a basic course of electronic technology practice. In order to realize the control of the six pilot lamp, automobile lamp control circuit uses the 74LS138 decoder to control the output, and with the 74LS76JK trigger to achieve three decimal cycle counter control, so that can easily achieve simulation of normal operation of the car and brake. In order to realize the function of cycle flashing of the lamp when the vehicle turns around,needs to cooperate with the another input S1 of the 74LS138 decoder . The timing pulse source is realized by the circuit of multivibrator circuit composed of 555 timer. Keyword:Automobile,pilot lamp,74LS138,555 timer
电子设计毕业设计-汽车尾灯控制电路设计论文资料-正文
1 引言 在日新月异的21世纪里,电子产品得到了迅速发展。许多电器设备都趋于人性化、智能化,这些电器设备大部分都含有CPU 控制器或者是单片机。单片机以其高可靠性、高性价比、低电压、低功耗等一系列优点,近几年得到迅猛发展和大范围推广,广泛应用于工业控制系统、通讯设备、日常消费类产品和玩具等。并且已经深入到工业生产的各个环节以及人民生活的各个方面,如车间流水线控制、自动化系统等、智能型家用电器(冰箱、空调、彩电)等。用单片机来控制的小型电器产品具有便携实用,操作简单的特点。 本文设计的汽车尾灯控制电路属于小型智能电子产品。利用单片机进行控制,实时时钟芯片进行记时,外加掉电存储电路和显示电路。此设计具有相当重要的现实意义和实用价值。 2 系统概述 本设计以AT89S52单片机为核心,构成单片机控制电路,完成对它们的自动调整和掉电保护。人机接口由四个按键来实现,用这四个按键对汽车左转,右转,停车和检测进行控制。。软件控制程序实现所有的功能。整机电路使用+5V 稳压电源,可稳定工作。系统框图如图2-1所示,其软硬件设计简单,可广泛应用于长时间工作的系统中。 图2-1 系统框图 3 方案选择 由于汽车尾灯控制电路的种类比较多,因此方案选择在设计中是至关重要的。正确地选择方案可以减小开发难度,缩短开发周期,降低成本,更快地将产品推向市场。 ** 方案1——基于AT89S52单片机的汽车尾灯控制电路设计 直接用AT89S52单片机来实现汽车尾灯控制电路设计。AT89S52是一种带8K 字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器,俗称单片机。单片机的可擦除只读存储器可以反复擦写1000余次。由于将多功能8位CPU 和闪烁存储器组合在单个芯片中,A TMEL 的A T89S52是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。 用单片机来实现汽车尾灯控制电路设计,无须外接其他芯片,充分利用了单片机的资源。 ** 方案2——基于电子元件的汽车尾灯控制电路设计 人机接口 显示电路 软件控制程序 电源电路 单片机控制电路
汽车尾灯控制器设计
齐鲁工业大学课程设计专用纸成绩 课程名称数字逻辑指导教师 院(系)信息学院专业班级 学生姓名仅作参考学号不谢设计日期 2014.7.2 课程设计题目汽车尾灯控制器设计 一、课程设计目的与任务 课程设计的目的:通过课程设计让学生进一步熟悉常用电子器件的类型和特性,并掌握合理选用的原则;提高学生的综合运用所学的理论知识,独立分析和解决问题的能力;让学生初步掌握对电子线路安装与调试等。 设计任务:设计一个汽车尾灯显示控制,实现对汽车尾灯状态的控制。 二、课程设计内容 1本设计题目的主要内容 本设计主要是用中、小规模集成电路设计一个汽车尾灯显示控制。在汽车尾部左右两侧各有3个指示灯(假定用发光二极管模拟),根据汽车运行的状况,指示灯需具有四种不同的状态:①汽车正向行驶时,左右两侧的指示灯处于熄灭状态。②汽车向右转弯行驶时,右侧的三个指示灯按循环顺序点亮③汽车向左转弯行驶时,左侧的三个指示灯按循环顺序点亮④汽车临时刹车时,左右两侧指示灯处于同时闪烁状态。 使用Multisim 2000进行仿真设计。 汽车尾灯显示控制的构成: (1)模式控制电路 (2)三进制计数器 (3)译码与显示驱动电路 (4)尾灯状态显示电路 2基本要求 (1)要求电路简单可靠,仿真结果基本正确。 (2)满足基本的设计要求,基本功能能够实现。 (3)提交课程设计报告。
3设计思想与总体构架 为了区分汽车尾灯的4种不同的显示模式,需设置2个状态控制变量。 假定用开关K1和K0进行显示模式控制,可列出汽车尾灯显示状态与汽车运行状态的关系,如表所示。 开关控制汽车运行状 态6个发光二极管 K1K0D1 D2 D3D4 D5 D6 11正常运行灯灭灯灭 10右转弯 按D1、D2、D3顺 序循环点亮 灯灭 01左转弯灯灭 按D4、D5、D6顺序 循环点亮 00临时刹车所有尾灯同时按cp闪烁 该电路主要有三方面的要求,一时脉冲,二是汽车的行驶状态要与汽车尾灯的显示要对应,三是汽车尾灯的循环变亮。脉冲使用555定时器构成的多谐振荡器,通过译码电路和开关控制电路实现汽车尾灯与汽车行驶状态的对应,使用3进制计数器实现汽车尾灯的循环。 总体框架:
汽车车灯控制系统讲解
信息科学与技术学院微机原理与接口技术 课程设计报告 题目名称:汽车车灯控制系统 学生姓名:吴权权 学号: 2009082190 专业年级:计科09-1班 指导教师:裘祖旗 时间: 2012-1-12
目录 1.题目及要求 (1) 1.1 题目 (1) 1.2 要求 (1) 2.功能设计 (1) 2.1 汽车图形 (1) 2.2 汽车左转 (1) 2.3 汽车右转 (1) 2.4 汽车前进 (1) 2.5 汽车倒退 (1) 2.6 汽车停止 (1) 2.7 响铃模块 (1) 3.主流程图 (2) 4.详细设计 (3) 4.1 汽车图形显示 (3) 3.2 汽车停止、转向、倒车的指示 (3) 5.结果显示 (4) 5.总结 (7) 6、程序代码 (8)
1.题目及要求 1.1 题目 汽车车灯控制系统 1.2 要求 1)实现停止时的指示灯; 2)实现汽车转向时指示 3)实现倒车指示 4)扩展功能:实现倒车的声音提示 2.功能设计 2.1 汽车图形 功能:用汇编语言在dos下实现一个汽车的图形,和四盏灯。 2.2 汽车左转 功能:按’A’键,实现汽车的左转,左前、左后指示灯亮,右前、右后指示灯灭。 2.3 汽车右转 功能:按’D’键,实现汽车的右转,左前、左后指示灯灭,右前、右后指示灯亮。 2.4 汽车前进 功能:按’W’键,实现汽车的向前行驶,并且四盏指示灯全灭。 2.5 汽车倒退 功能:按’S’键,实现汽车的倒退行驶,并且后面2盏指示灯全亮,前面2盏指示灯全灭。 2.6 汽车停止 功能:按’B’键,实现汽车的停止,并且四盏指示灯全亮和倒车提示音。 2.7 响铃模块 功能:汽车停止时,提供倒车提示音。
汽车尾灯控制电路
电子技术课程设计任务书
电子技术课程设计任务书 2.对课程设计成果的要求〔包括图表、实物等硬件要求〕: 设计电路,安装调试或仿真,分析实验结果,并写出设计说明书,语言流畅简洁,文字不得少于3500字。要求图纸布局合理,符合工程要求,使用Protel软件绘出原理图(SCH)和印制电路板(PCB),器件选择要有计算依据。 3.主要参考文献: [1]谢自美。电子线路设计、实验、测试[M]华中理工大学,2001 [2] 彭介华. 电子技术课程设计指导[M]. 北京:高等教育出版社,1997 [3] 毕满清. 电子技术实验与课程设计[M]. 北京:机械工业出版社,1995 [4] 陈明义. 电工电子技术课程设计指导[M]. 长沙:中南大学出版社,2002 [5] 陈永甫. 新编555集成电路应用800例[M]. 北京:电子工业出版社2000 [6] . 4.课程设计工作进度计划: 序号起止日期工作内容 1 2011-1-3 布置任务,教师讲解设计方法及要求 2 2011-1-4 学生查找阅读资料,并确定方案 3 2011-1-5 学生设计小组会议,讨论方案 4 2011-1-6~11 设计、仿真实验 5 2010-1-12~13 写说明书,小组讨论 6 2010-1-14 答辩 指导教师苏泽光日期: 2010 年 12 月日
目录 引言 (1) 1 设计方案 (2) 汽车尾灯电路实际设计要求 (2) 设计原理及原理框图 (2) 2 单元电路设计 (2) 时钟脉冲电路 (2) 开关控制电路 (4) 三进制计数器 (5) 译码、显示驱动电路 (6) 3 性能测试与仿真 (7) 仿真软件的简单介绍 (7) Protel 99SE简单介绍 (7) IN Multisim10简单介绍 (8) 利用Multisim仿真与测试 (9) 原理图(SCH)和电路板(PCB) (14) 4结论 (15) 参考文献 (17) 摘要 汽车行驶时会有正常行驶、左转弯、右转弯和刹车四种情况,针对这四种情况
汽车尾灯控制电路设计说明书
中北大学 课程设计说明书 学生姓名:学号: 学院:信息与通信工程学院 专业:光电信息科学与工程 题目:汽车尾灯控制电路设计 指导教师:职称: 指导教师:职称: 201X年 X月X日
中北大学 课程设计任务书201X/201X 学年第一学期 学院:信息与通信工程学院专业:光电信息科学与工程学生姓名:学号: 课程设计题目:汽车尾灯控制电路设计起迄日期:X月X日~X月X日课程设计地点:中北大学 指导教师: 学科管理部主任: 下达任务书日期: 201X年X月X日
1.设计目的: 本课程设计主要针对模拟电子技术和数字电子技术课程要求,培养学生在查阅资料的基础上,进行实用电路设计、计算、仿真、调试等多个环节的综合能力,同时培养学生用课程中所学的理论独立地解决实际问题的能力。另外还培养学生用专业的、简洁的文字,清晰的图表来表达自己设计思想的能力。 2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等): (假设汽车尾部左右各有3只指示灯,汽车正常运行时全部熄灭;右转时右侧3只灯依次按右循环点亮;左转时左侧3只灯依次按左循环点亮;刹车时所有灯同时闪烁。)(1)掌握车灯右循环电路的设计、仿真与调试; (2)掌握车灯左循环电路的设计、仿真与调试; (3)掌握延时电路的设计、仿真与调试,车灯循环点亮和闪烁时,点亮和熄灭时间都为2秒,精度大于10%; (4)掌握状态切换电路的设计、仿真与调试; (5)掌握方案设计与论证; (6)掌握用相关软件进行电路图设计、仿真,以及对仿真结果的分析、总结。 3.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文)、图纸、实物样品等〕: (1)提供核心器件的工作原理与应用介绍; (2)提供用Protel99/DXP设计的电路原理图,印刷板电路图选做; (3)提供用Multisim、MaxPlus、Proteus等其他软件对电路的仿真结果与分析; (4)提供符合规定要求的课程设计说明书,图、表清晰; (5)提供参考文献不少于三篇,且必须是相关的参考文献。
汽车尾灯课程设计报告
课程设计报告 课程名称:电子技术课程设计 设计题目:汽车尾灯控制器 专业:电气工程及其自动化 班级: 2009 学号 学生XX:李博 时间:2012 年 2月 27 日~3月 2 日 ―――――――以下指导教师填写―――――分项成绩:出勤成品答辩及考核 总成绩:总分成绩 指导教师:
课程设计报告要求和成绩评定 1报告基本内容 前言,目录,任务书,正文,参考文献。 2 书写用纸 A4复印纸。 3 书写要求 主要部分手工双面或单面书写(计算机绘图等指定内容可打印),字迹清楚,每页20行左右,每行30字左右,排列整齐;页码居中写在页面下方;纸面上下左右4侧边距均为2厘米。 前言和目录合写作为第一页;参考文献接正文书写,不另起页。 公式单占一行居中书写;插图要有图号和图题,图号和图题书写在插图下方;表格要有表号和表题,表号和表题在表格上方书写;物理量单位和符号、参考文献引用和书写以及图纸绘制要符合有关标准规定;有关细节可参考我院《毕业设计成品规X》。 4 装订 装订顺序:封面,前言和目录,任务书,正文及参考文献,图纸,封底;左边为装订边,三钉装订,中间钉反向装订。 5 成绩评定 课程设计成绩由出勤(10分)、报告书写规X性及成品[注]质量(30分)、答辩及考核(60分)三部分成绩合成后折合为优秀(90-100分)、良好(80-89分)、中(70-79分)、及格(60-69分)或不及格(60分以下)。 注:成品含义由课程设计任务书规定,除课程设计报告外,还可以包括图纸、计算机程序、制作品、实验或测试方案等。
前言 在当今社会中,数字时代已经成为一种现实,并且时刻影响着人们的日常生活,作为数字化的基础——数字电子电路,无疑是至关重要的。数字电路课程设计便是本课程的一种很好的实践,更是加深电子技术理论理解的重要途径,同时有助于培养我们严谨,探索的科学精神。 “汽车尾灯控制电路”作为电子技术基础课程的一个实践,利用基本的芯片:双向移位寄存器74LS194,二输入与非门74LS00、四输入与非门74LS20、六反相器74LS04、3-8译码器,555定时器及电阻电容进行搭建。综合数字电路和模拟电路的知识,提升了我们理实际解决问题的能力,有助于增强我们将理论转为实际的意识,是一种很好的锻炼和学习方式。 在实际的设计过程中得到了尚志刚,苏士美等老师的鼎力相助,谢谢他们的无私的指导,“汽车尾灯控制电路”才得以顺利完成。再次祝他们工作顺利,万事如意。 由于时间紧迫和水平有限,本课程设计报告还存在瑕疵,恳请老师提出指正意见。 作者:李博 2012年3月2日
电子技术课程设计汽车尾灯
课程设计报告设计题目:汽车尾灯控制电路的设计与实现 班级:计算机 学号: 姓名: 指导教师: 设计时间: 摘要 进行本次课程设计主要有两个目的,一是对数字逻辑这门课程的理论知识进行一次系统的梳理;二是锻炼自己将理论应用于实践的能力。针对以上目的,就要求做到,通过分析实际的需求提炼出相应的理论模型,进而再进行电路的设计,在之后的实际电路实现的过程中,还可以根据实际的需要对电路做出一些改进。 本课题设计一个汽车尾灯的控制电路。汽车尾部左右两侧各有3个指示灯(用发光二极管模拟)。 使用555定时器发出秒脉冲,74LS161计数器和74LS138以及其他逻辑门实现控制个驱动功能,实现基本要求和扩展,即汽车正常行驶时指示灯不亮;右转弯时右侧3个指示灯按右循环顺序点亮,左侧指示灯全灭;左转弯时左侧3个指示灯按左循环顺序点亮,右侧指示灯全灭;汽车临时刹车和倒车时指示灯闪烁;右转弯刹车时右侧灯顺序循环点亮,左侧灯全亮;左转弯刹车时左侧灯顺序循环点亮,右侧灯全亮以及用数码管显示各个状态等。 关键词:计数器,译码器,555定时器,逻辑门等 目录 摘要 (2) 第1章概述 (4) 第2章课程设计任务及要求 (5) 2.1 设计任务 (5)
2.2 设计要求 (5) 第3章系统设计 (7) 3.1 方案论证 (7) 3.2 系统设计 (7) 3.2.1 结构框图及说明 (7) 3.2.2 系统原理图及工作原理 (8) 3.3 单元电路设计 (9) 3.3.1 单元电路工作原理 (9) 3.3.2 元件参数选择 (12) 第4章软件仿真 (13) 4.1 仿真电路图 (13) 4.2 仿真过程 (13) 4.3 仿真结果 (14) 第5章安装调试 (20) 5.1 安装调试过程 (20) 5.2 故障分析 (20) 第6章结论 (21) 第7章使用仪器设备清单 (21) 参考文献 (21) 收获、体会和建议 (22) 第1章概述 随着现代科技和社会经济的发展,汽车已经逐步被广泛应用于人们的生产和生活。而对于汽车行驶安全的要求就显得尤为重要,通过科技的力量来改进汽车的性能已经成为主要的方向。立足于《电子技术》这门课程的知识体系,力求通过本学科的一些知识对汽车的尾灯显示电路进行模拟和做出一些分析改进。希望通过这次设计实践,达到两个目的,锻炼自己的动手实践能力,以及用已学的知识对汽车尾灯控制电路进行详尽的分析与模拟。 对于汽车尾灯控制电路这项课设,主要有三方面的要求:一是脉冲频率的要求;二是汽车尾灯显示与汽车行驶状态一一对应;三是汽车尾灯的显示要依次循环变亮。针对
汽车车灯控制系统DOC
信息科学与技术学院微机原理与接口技术课程设计报告 题目名称:汽车车灯控制系统
目录 1.题目及要求 (1) 1.1 题目 (1) 1.2 要求 (1) 2.功能设计 (1) 2.1 汽车图形 (1) 2.2 汽车左转 (1) 2.3 汽车右转 (1) 2.4 汽车前进 (1) 2.5 汽车倒退 (1) 2.6 汽车停止 (1) 2.7 响铃模块 (1) 3.主流程图 (2) 4.详细设计 (3) 4.1 汽车图形显示 (3) 3.2 汽车停止、转向、倒车的指示 (3) 5.结果显示 (4) 5.总结 (7) 6、程序代码 (8)
1.题目及要求 1.1 题目 汽车车灯控制系统 1.2 要求 1)实现停止时的指示灯; 2)实现汽车转向时指示 3)实现倒车指示 4)扩展功能:实现倒车的声音提示 2.功能设计 2.1 汽车图形 功能:用汇编语言在dos下实现一个汽车的图形,和四盏灯。 2.2 汽车左转 功能:按’A’键,实现汽车的左转,左前、左后指示灯亮,右前、右后指示灯灭。 2.3 汽车右转 功能:按’D’键,实现汽车的右转,左前、左后指示灯灭,右前、右后指示灯亮。 2.4 汽车前进 功能:按’W’键,实现汽车的向前行驶,并且四盏指示灯全灭。 2.5 汽车倒退 功能:按’S’键,实现汽车的倒退行驶,并且后面2盏指示灯全亮,前面2盏指示灯全灭。 2.6 汽车停止 功能:按’B’键,实现汽车的停止,并且四盏指示灯全亮和倒车提示音。 2.7 响铃模块 功能:汽车停止时,提供倒车提示音。
3.主流程图 No Yes Yes RET No Yes RET No Yes RET No Yes RET No Yes RET No 非定义字符 RET Yes 开始 与W 比较 有无按健 退出 等待 与A 比较 与D 比较 调用DRAW_W 调用DRAW_A 调用DRAW_D 与S 比较 调用DRAW_S 和响铃函数 与B 比较 调用STOP 与空格比较
汽车尾灯控制器设计完整版
1、Proteus简介 1.1概述 Proteus 软件是英国Labcenter electronics 公司出版的EDA工具软件(该软 件中国总代理为广州风标电子技术有限公司)。它不仅具有其它EDA工具软件的仿 真功能,还能仿真单片机及外围器件。它是目前最好的仿真单片机及外围器件的工 具。虽然目前国内推广刚起步,但已受到单片机爱好者、从事单片机教学的教师、致力于单片机开发应用的科技工作者的青睐。Proteus是世界上著名的EDA工具(仿 真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PC B设计,真正实现了从概念到产品的完整设计。是目前世界上唯一将电路仿真软件、 PCB设计软件和虚拟模型仿真软件三合一的设计平台,其处理器模型支持8051、H C11、PIC10/12/16/18/24/30/DsPIC33 、AVR ARM 8086 和MSP430等,2010 年即 将增加Cortex和DSP系列处理器,并持续增加其他系列处理器模型。在编译方面, 它也支持IAR、Keil和MPLAB等多种编译器。 1.2具有四大功能模块: 1.2.1智能原理图设计(ISIS) 丰富的器件库:超过27000种元器件,可方便地创建新元件; 智能的器件搜索:通过模糊搜索可以快速定位所需要的器件; 智能化的连线功能:自动连线功能使连接导线简单快捷,大大缩短绘图时间; 支持总线结构:使用总线器件和总线布线使电路设计简明清晰; 可输出高质量图纸:通过个性化设置,可以生成印刷质量的BMP图纸,可以方便地供WOR D POWERPOIN等多种文档使用。 122完善的电路仿真功能(Prospice ) Prospice混合仿真:基于工业标准SPICE3F5,实现数字/模拟电路的混合仿直. 超过27000个仿真器件:可以通过内部原型或使用厂家的SPICE文件自行设
汽车尾灯控制电路
课程设计说明书 课程设计名称:电子课程设计 课程设计题目:汽车尾灯控制电路 学院名称:信息工程学院 专业:计算机科学与技术班级: 学号:姓名: 评分:教师: 20 10 年 9 月 15 日 摘要 随着科学技术的全方面发展,汽车制造工艺得到了长足的进步,使得汽车
已经成为现代人们主要的交通工具。人们了解到他们便捷、快速之余,也同时意识到汽车潜在的安全隐患,所以对具有汽车行驶状况提示作用的汽车尾灯进行研究是非常必要的。 本次课题设计的目的:设计汽车尾灯控制电路,由两个开关控制实现汽车正常运行、右转弯、左转弯和刹车时尾灯的情况。尾灯分别由左右各三个灯泡组成,实验中采用发光二极管显示。这样可以使得尾灯更清楚明显更加人性化。本次设计是关于汽车尾灯控制电路的设计,根据汽车尾灯显示状态与汽车运行状态的关系,分析并设计电路。整个电路由控制电路,三进制计数器,译码与显示驱动电路,尾灯状态显示4部分组成。分析了使能控制信号与模式控制变量、时钟脉冲的关系,运用J—K触发器、3—8译码器等实现了根据汽车的运行状态,指示灯显示4种不同的模式。本文详细的介绍了电路的设计思路及其实现过程,包括了整个设计流程。 通过上述电路组成使得汽车正常行驶时尾灯全灭,左转弯时左边三个指示灯顺序点亮,右转弯时右边三个指示灯顺序点亮,紧急刹车时左右两边指示灯同时闪烁,从而完成整个汽车尾灯控制电路的设计。 经过一系列的分析、仿真模拟等准备工作,本次课题设计基本都实现了全部的设计要求。 关键字:汽车尾灯、循环闪烁、译码、脉冲源 目录 前言 (4)
第一章设计内容及要求 (5) 第二章系统设计方案选择 2.1 方案一 (6) 2.2 方案二 (7) 第三章系统组成及工作原理 3.1 系统组成 (8) 3.2 工作原理 (9) 第四章单元电路设计、参数计算、器件选择 4.1 CP脉冲电路的设计......................................`10 4.2 三进制计数器电路设计. (11) 4.3 开关控制电路设计 (12) 4.4译码及显示驱动电路 (13) 第五章实验调试及测试结果与分析 (15) 第六章实验总结及收获 (16) 参考文献 (17) 附录一 (18) 附录二 (21) 附录三 (22) 前言 汽车技术的发展趋势是电子化、智能化、信息化和集成化当前国际汽车
汽车尾灯控制电路
汽车尾灯控制电路 设计者:
汽车尾灯控制电路 内容摘要 本课题设计一个汽车尾灯的控制电路。 汽车尾部左右两侧各有3个指示灯。当接通左转、右转、刹车和检查时,指示灯按照指定要求闪烁。 一、设计内容及要求 本课题设计一个汽车尾灯的控制电路。该电路由四个电键控制,分别对应着左转、右转、刹车和检查功能。 当接通左转或右转电键时,左侧或右侧的3个汽车尾灯按照左循环或右循环的顺序依次点亮。 当接通刹车电键时,汽车所有的尾灯同时闪烁。 当接通检查电键时,汽车所有的尾灯点亮。 二、电路的工作原理 经过以上所述的设计内容及要求的分析,可以将电路分为以下几部分:首先,通过555定时器产生频率为1Hz的脉冲信号,该脉冲信号用于提供给D触发器和刹车时的输入信号。 3个D触发器用于产生三端输出的001、010、100的循环信号,此信号提供左转、右转的原始信号。 左转、右转的原始信号通过6个与门以及电键提供的高低电位信号,将原始信号分别输出到左、右的3个汽车尾灯上。这部分电路起到信号分拣的作用。 分拣之后的信号通过或门,实现与刹车、检查电键信号的之间选择。最终得到的信号即可输出到发光二极管上,实现所需功能。 三、系统方案的选择 在设计本电路时,一共考虑过三种方案。这三种方案的不同点在于产
生001、010、100三种信号的方法不同。下面简单的介绍一下这三种方案: 第一种方案:该方案通过74LS160计数器构成能产生01、10、11三种状态循环的信号,然后再通过逻辑电路将其转换成所需的001、010、100三种左转或右转的信号。0 设:74LS160输出的两位信号从高位到低位分别是B A ,输出信号为Z Y X 。 则 经过 ) ()(AB B Z AB A Y AB X === 的逻辑运算便可实现所需的功能。 电路图如下: 但是该方案在模拟时发现,由于计数器的竞争冒险的存在,使得尾灯在闪烁时总会出现不自然的中间过程。 第二种方案:通过74LS194移位寄存器来产生001、010、100的三种
汽车尾灯控制器设计——完整版
1、Proteus简介 1.1 概述 Proteus软件是英国Labcenter electronics公司出版的EDA工具软件(该软件中国总代理为广州风标电子技术有限公司)。它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件。它是目前最好的仿真单片机及外围器件的工具。虽然目前国内推广刚起步,但已受到单片机爱好者、从事单片机教学的教师、致力于单片机开发应用的科技工作者的青睐。Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PC B设计,真正实现了从概念到产品的完整设计。是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台,其处理器模型支持8051、H C11、PIC10/12/16/18/24/30/DsPIC33、AVR、ARM、8086和MSP430等,2010年即将增加Cortex和DSP系列处理器,并持续增加其他系列处理器模型。在编译方面,它也支持IAR、Keil和MPLAB等多种编译器。 1.2 具有四大功能模块: 1.2.1 智能原理图设计(ISIS) 丰富的器件库:超过27000种元器件,可方便地创建新元件; 智能的器件搜索:通过模糊搜索可以快速定位所需要的器件; 智能化的连线功能:自动连线功能使连接导线简单快捷,大大缩短绘图时间; 支持总线结构:使用总线器件和总线布线使电路设计简明清晰; 可输出高质量图纸:通过个性化设置,可以生成印刷质量的BMP图纸,可以方便地供WORD、POWERPOINT等多种文档使用。
1.2.2 完善的电路仿真功能(Prospice) Prospice混合仿真:基于工业标准SPICE3F5,实现数字/模拟电路的混合仿真; 超过27000个仿真器件:可以通过内部原型或使用厂家的SPICE文件自行设计仿真器件,Labcenter也在不断地发布新的仿真器件,还可导入第三方发布的仿真器件; 多样的激励源:包括直流、正弦、脉冲、分段线性脉冲、音频(使用wav 文件)、指数信号、单频FM、数字时钟和码流,还支持文件形式的信号输入; 丰富的虚拟仪器:13种虚拟仪器,面板操作逼真,如示波器、逻辑分析仪、信号发生器、直流电压/电流表、交流电压/电流表、数字图案发生器、频率计/计数器、逻辑探头、虚拟终端、SPI调试器、I2C调试器等; 生动的仿真显示:用色点显示引脚的数字电平,导线以不同颜色表示其对地电压大小,结合动态器件(如电机、显示器件、按钮)的使用可以使仿真更加直观、生动; 高级图形仿真功能(ASF):基于图标的分析可以精确分析电路的多项指标,包括工作点、瞬态特性、频率特性、传输特性、噪声、失真、傅立叶频谱分析等,还可以进行一致性分析; 1.2.3 独特的单片机协同仿真功能(VSM) 支持主流的CPU类型:如ARM7、8051/52、AVR、PIC10/12、PIC16、PIC18、PIC24、dsPIC33、HC11、BasicStamp、8086、MSP430等,CPU类型随着版本升级还在继续增加,如即将支持CORTEX、DSP处理器; 支持通用外设模型:如字符LCD模块、图形LCD模块、LED点阵、LED七段显示模块、键盘/按键、直流/步进/伺服电机、RS232虚拟终端、电子温度计等等,其COMPIM(COM口物理接口模型)还可以使仿真电路通过PC机串口和外部电路实现双向异步串行通信; 实时仿真:支持UART/USART/EUSARTs仿真、中断仿真、SPI/I2C仿真、MSSP 仿真、PSP仿真、RTC仿真、ADC仿真、CCP/ECCP仿真; 编译及调试:支持单片机汇编语言的编辑/编译/源码级仿真,内带8051、AV