多层神经网络1
多层神经网络
灰书包资源共享联盟/文化产业资源下载基地/灰书包文化产业/文化创意产业灰书包
多层神经网络寻求的是一种在训练线性判别函数的同时学习其非线性程度的方法;决定非线性映射的参数的学习是与控制线性判别函数的参数的学习同时进行的。
两层网络只能实现一个线性判决边界,如果给出足够数量的隐单元,三层及更多层网络就可以实现任意的判决边界。各判决区不必是凸的或是单联通的。
多层神经网络的优点是算法简单,运行非线性函数的具体形式可以通过训练样本获得。
训练多层网络的方法即反向传播算法(BP算法),是基于误差的梯度下降准则(LMS算法)的一种自然延伸。
神经网络是一种可以适应复杂模型的非常灵活的启发式的统计模式识别技术。
反向传播有一些启发式技巧,我们可以对输入值的范围、初始权值、期望输出等参数值做出明智的选择。
网络拓扑在神经网络分类中起着重要作用。通过对隐含层的数目、节点单元个数、反馈节点的个数等选择,可将对问题非正式或启发式的知识嵌入到网络结构中。因此,网络拓扑的设置也是一种启发式的选择。
设置网络拓扑来选择模型、通过反向传播算法来估计参数,是测试各种可选模型的方法。神经网络技术应用问题涉及到正则化,即选择或调整网络的复杂程度。
1 前馈运算和分类
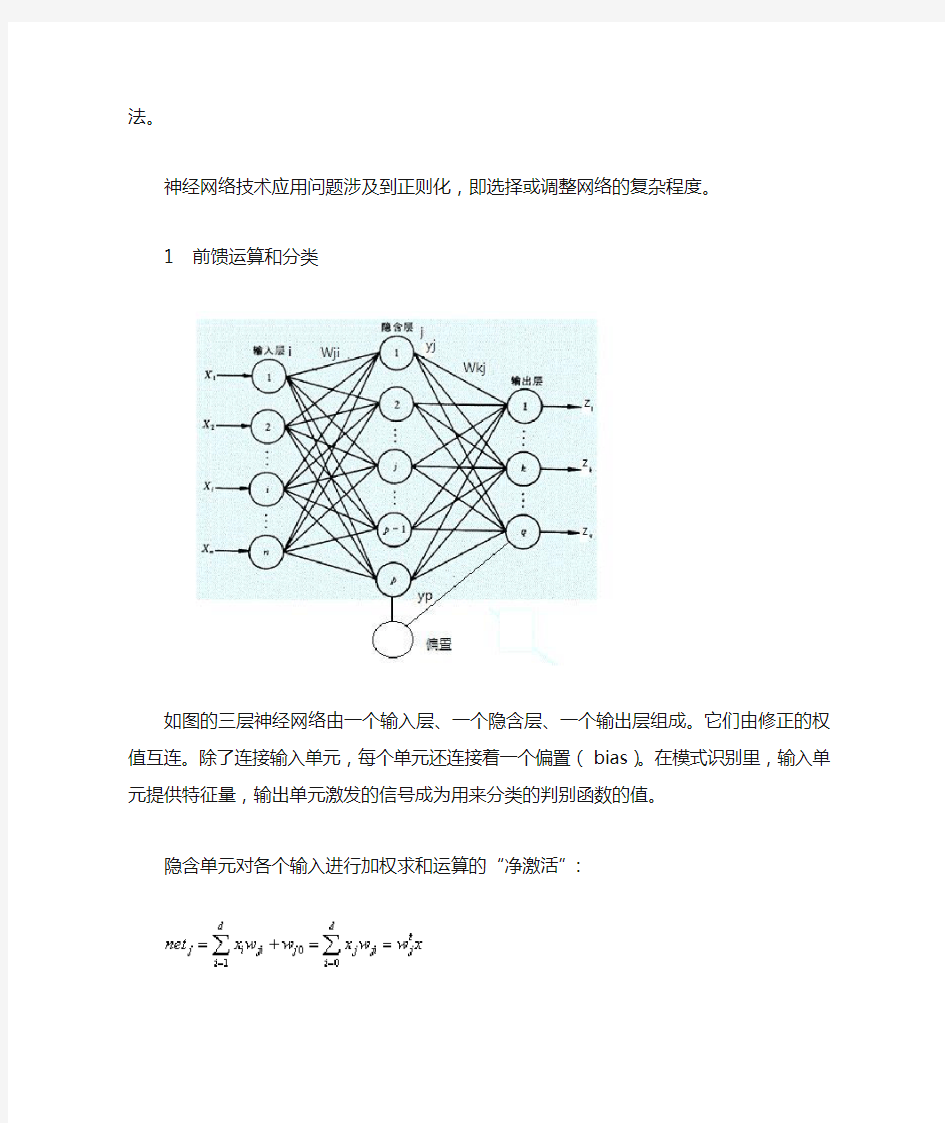
如图的三层神经网络由一个输入层、一个隐含层、一个输出层组成。它们由修正的权值互连。除了连接输入单元,每个单元还连接着一个偏置(bias)。在模式识别里,输入单元提供特征量,输出单元激发的信号成为用来分类的判别函数的值。
隐含单元对各个输入进行加权求和运算的“净激活”:
每个隐含层单元激发出一个输出分量,这个分量是它激活的非线性函数,即
输出单元的净激活:
输出单元对net的非线性函数是:
例如,激活函数可以是符号函数,但一般要求激活函数式连续可微的。也允许输出层的激活函数同隐含层的不一样,甚至每个单元都有不同的激活函数。
只有两种类别时,一般只采用单个输出单元,通过输出值得符号来标识一个输入模式。有多个输出单元时,计算每个判别函数,并通过使判别函数最大来将输入信号分类。
多层网络的表达能力:任何从输入到输出的连续映射函数都可以用一个三层非线性网络实现,条件是给出足够数量的隐单元nH、适当的非线性函数和权值。
2 反向传播算法
神经网络的关键问题是根据训练样本和期望输出来设置合适的权值。
反向传播是最简单也最一般的方法,是线性LMS算法的自然延伸,更具启发价值。
反向传播的作用在于可以对每一个隐单元计算有效误差,并由此推导出一个输入层到隐含层权值的学习规则。
网络由两类基本运算模式:前馈和学习。前馈运算包括提供一个模式给输入单元、在网络间传递信号,然后在输入单元得到输出。对于有监督的学习,包括了提供一个输入模式,并改变网络参数使实际输出更加接近期望教师信号或目标值。
上图的三层网络中:在前馈操作里,一个d维的输入模式x被提供给输入层,每个输入单元发送它所对应的分量xi。nH个隐单元中的每一个都计算它的净激活能netj,它是输入层信号和隐单元权值wji的内积。隐单元的输出是yj=f(netj),f()是一个非线性转换函数,这里是sigmoid。c个输出单元的工作原理类似于隐含层单元的,计算净激活能netk,即隐单元信号和输出单元权值的内积。网络的最终发送信号zk=f(netk)作为分类用的判别函数。网络训练过程中,这些输出信号和一个引导向量或目标向量t作比较,任何差值都用于整个网络的权值训练。
灰书包资源共享联盟/文化产业资源下载基地/灰书包文化产业/文化创意产业灰书包
任一差值对应一误差。该误差或准则函数是权值的某种标量函数,它在网络输出与期望输出匹配时达到最小。权值向着可以减小误差值的方向调整。
考虑一个模式的训练误差,定义为输出端的期望输出值tk和实际输出值zk的差的平方和。
即损失函数:
方向传播学习规则是基于梯度下降法的。权值首先被初始化为随机值,然后向误差减小的方向调整。
其中n是学习率,仅表示权值的相对变化尺度。
迭代算法在第m次迭代时取一个权向量并将它更新为
考虑第一个隐含层到输出层的权值wkj。由于误差并不是明显决定于wjk,我们必须使用链式微分法则:
其中单元k的敏感度定义为
此敏感度描述总误差怎样随着单元的激发而变化。
由输出单元净激活公式可推得:
灰书包资源共享联盟/文化产业资源下载基地/灰书包文化产业/文化创意产业灰书包
综上所述,可得隐含层到输出层的权值更新或学习规则:
考虑输入层到隐含层的权值学习规则
反向传播算法,更确切的说“误差反向传播”算法。在训练过程中一个误差(敏感度)必须从输出层传播回隐含层,以实现输入层到隐含层的权值学习。本质上,反向传播只是“分层模型”里的梯度下降法。在分层模型里对连续函数执行链式法则可以计算准则函数对所有模型权值的导数。
初始权值的设置
如果权值全部为0,反向传播误差也将为0,输入层到输出层的权值将不变。故不能设为0,一般采用随机初始值。
3 训练协议及学习曲线
灰书包资源共享联盟/文化产业资源下载基地/灰书包文化产业/文化创意产业灰书包
三种:随机训练、成批训练、在线训练
随机训练是指模式是随机从训练集中取出的,网络权值也根据不同模式进行更新。
成批训练是指在每回合训练时将全部模式送入网络中训练,直到总的误差小于预设值为止。全文阅读地址:https://www.360docs.net/doc/d29724621.html,
参考资料
《模式分类》Richard O.Duda
天使
神经网络例题汇总
一、名词解释(共5题,每题5分,共计25分) 1、泛化能力 答:泛化能力又称推广能力,是机器学习中衡量学习机性能好坏的一个重要指标。泛化能力主要是指经过训练得到的学习机对未来新加入的样本(即测试样本)数据进行正确预测的能力。 2、有监督学习 答:有监督学习又被称为有导师学习,这种学习方式需要外界存在一个“教师”,她可以对一组给定输入提供应有的输出结果,学习系统可根据已知输出与实际输出之间的差值来调节系统参数。 3、过学习 答:过学习(over -fitting ),也叫过拟和。在机器学习中,由于学习机器过于复杂,尽管保证了分类精度很高(经验风险很小),但由于VC 维太大,所以期望风险仍然很高。也就是说在某些情况下,训练误差最小反而可能导致对测试样本的学习性能不佳,发生了这种情况我们称学习机(比如神经网络)发生了过学习问题。典型的过学习是多层前向网络的BP 算法 4、Hebb 学习规则 答:如果两个神经元同时兴奋(即同时被激活),则它们之间的突触连接加强。如果用i v 、j v 表示神经元i 和j 的激活值(输出),ij ?表示两个神经元之间的连接权,则Hebb 学习规则可以表示为:ij i j w v v α?=,这里α表示学习速率。Hebb 学习规则是人工神经网络学习的基本规则,几乎所有神经网络的学习规则都可以看作Hebb 学习规则的变形。 5、自学习、自组织与自适应性 答:神经网络结构上的特征是处理单元的高度并行性与分布性,这种特征使神经网络在信息处理方面具有信息的分布存储与并行计算而且存储与处理一体化的特点。而这些特点必然给神经网络带来较快的处理速度和较强的容错能力。能力方面的特征是神经网络的自学习、自组织与自适应性。自适应性是指一个系统能改变自身的性能以适应环境变化的能力,它包含自学习与自组织两层含义。自学习是指当外界环境发生变化时,经过一段时间的训练或感知,神经网络能通过自动调整网络结构参数,使得对于给定输入能产生期望的输出。自组织是指神
多层循环神经网络在动作识别中的应用
Computer Science and Application 计算机科学与应用, 2020, 10(6), 1277-1285 Published Online June 2020 in Hans. https://www.360docs.net/doc/d29724621.html,/journal/csa https://https://www.360docs.net/doc/d29724621.html,/10.12677/csa.2020.106132 Multilayer Recurrent Neural Network for Action Recognition Wei Du North China University of Technology, Beijing Received: Jun. 8th, 2020; accepted: Jun. 21st, 2020; published: Jun. 28th, 2020 Abstract Human action recognition is a research hotspot of computer vision. In this paper, we introduce an object detection model to typical two-stream network and propose an action recognition model based on multilayer recurrent neural network. Our model uses three-dimensional pyramid di-lated convolution network to process serial video images, and combines with Long Short-Term Memory Network to provide a pyramid convolutional Long Short-Term Memory Network that can analyze human actions in real-time. This paper uses five kinds of human actions from NTU RGB + D action recognition datasets, such as brush hair, sit down, stand up, hand waving, falling down. The experimental results show that our model has good accuracy and real-time in the aspect of monitoring video processing due to using dilated convolution and obviously reduces parameters. Keywords Action Recognition, Dilated Convolution, Long Short-Term Memory Network, Deep Learning 多层循环神经网络在动作识别中的应用 杜溦 北方工业大学,北京 收稿日期:2020年6月8日;录用日期:2020年6月21日;发布日期:2020年6月28日 摘要 人体动作识别是目前计算机视觉的一个研究热点。本文在传统双流法的基础上,引入目标识别网络,提出了一种基于多层循环神经网络的人体动作识别算法。该算法利用三维扩张卷积金字塔处理连续视频图
多层前馈神经网络
多层前馈神经网络 5 多层前馈网络及BP算法 多层前馈网络的反向传播 (BP)学习算法,简称BP算法,是有导师的学习,它是梯度下降法在多层前馈网中的应用。 (a) 网络结构 yu 见下图,、是网络的输入、输出向量,神经元用节点表示,网络由输入层、隐层和输出层节点组成,隐层可一层,也可多层(图中是单隐层),前层至后层节点通过权联接。由于用BP学习算法,所以常称BP神经网络。 I:y:x:每个神经元(节点)的输入;每个神经元(节点)的输出;神经元j w:jji的第个输入。神经元到神经元的连接权 ij ,,y,f(x,,)节点的作用函数:, 为阈值(可设置一个偏置节点代替) 1,f可为线性函数,一般取为Sigmoid函数 , 为很小的数,如0.1 ,x/,1,e (b) BP学习算法 ? 已知网络的输入/输出样本,即导师信号。 ? BP学习算法由正向传播和反向传播组成: ? 正向传播是输入信号从输入层经隐层,传向输出层,若输出层得到了期望
的输出,则学习算法结束;否则,转至反向传播。 ? 反向传播是将误差(样本输出与网络输出之差)按原联接通路反向计算, 由梯度下降法调整各层节点的权值和阈值,使误差减小。 BP学习算法步骤如下: W(0)(1) 设置初始权值,它是较小的随机非零值。 (2) 给定输入/输出样本对,计算网络的输出。 ,,u,u,u,...,u设第p组样本输入: p1p2pnp ,,d,d,d,...,d,p,1,2,..,L 输出: p1p2pmp ypi节点在第组样本输入时,输出为 : ip ,, ,,y(t),fx(t),fw(t)I ----(1式) ,,,ipipijjpj,, Ijpi式中,是在第组样本输入时,节点的第个输入。 jp 1f(,)f(x)s取可微的型作用函数式 = -------(2式) ,x1,e可由输入层隐层至输出层,求得网络输出层节点的输出。 J(1) 计算网络的目标函数 ELp设为在第组样本输入时,网络的目标函数,取范数,则 p2 111222E(t),||d,y(t)||,[d,y(t)],e(t)--------(3式) ,,pppkpkpkp2222kk y(t)pkt式中,是在第组样本输入时,经次权值调整后网络的输出:是p k输出层第个节点。 E(t)J(t),网络的总目标函数: = ----------(4式) p p 作为对网络学习状况的评价。 (2) 判别 J(t),若 ? -------(5式)
人工智能教程习题及答案第9章神经网络与遗传算法
第九章神经网络与遗传算法习题参考解答 9.1练习题 9.1 何谓人工神经网络?它有哪些特征? 9.2 生物神经元由哪几部分构成?每一部分的作用是什么?它有哪些特性? 9.3 什么是人工神经元?它有哪些连接方式? 9.4 B-P算法的网络结构是什么?简述B-P算法的学习过程。 9.5 什么是网络的稳定性? Hopfield网络模型分为哪两类?两者的区别是什么? 9.6 有教师学习与无教师学习的区别是什么? 请分析说明。 9.7 Hopfield模型与B-P模型的网络结构有何异同? 9.8 简述简单遗传算法的基本原理和一般过程,说明个体选择的常用策略,以及遗传操作“交叉”和“变异”所起的作用。 9.9 遗传算法有哪些特点?在应用遗传算法时要解决的最关键问题有哪些? 9.2习题参考解答 9.1 答: (略) 9.2 答: 生物神经元主要由三部分构成:细胞体、轴突和树突。 每一部分的作用是:(a)细胞体是神经元的新陈代谢中心,同时还用于接收并处理从其他神经元传递过来的信息。(b)轴突的作用相当于神经元的输出电缆,它通过尾部分出的许多神经末梢以及梢端的突触向其他神经元输出神经冲动。(c)树突的相当于神经元的输入端,用于接收从四面八方传来的神经冲动。 神经元的功能特性包括:(a)时空整合功能。(b)神经元的动态极化性。(c)兴奋与抑制状态。(d)结构的可塑性。(e)脉冲与电位信号的转换。(f)突触延期和不应期。(g)学习、遗忘和疲劳。 9.3 答: (略) 9.4 答: B-P算法的网络结构是一个前向多层网络。网络中不仅含有输入节点和输出节点,而且含有一层或多层隐(层)节点,网络中各处理单元间的连接如图6.16所示。当有信息向网络输入时,信息首先由输入层传递到隐层节点,经特性函数(人工神经元)作用后,再
神经网络基于BP网络的多层感知器实验报告
神经网络基于BP网络的多层感知器实验报告 二、基于BP网络的多层感知器一:实验目的: 1、理解多层感知器的工作原理 2、通过调节算法参数了解参数的变化对于感知器训练的影响 3、了解多层感知器局限性二:实验原理:BP的基本思想:信号的正向传播误差的反向传播–信号的正向传播:输入样本从输入层传入,经各隐层逐层处理后,传向输出层。 –误差的反向传播:将输入误差以某种形式通过隐层向输入层逐层反传,并将误差分摊给各层的所有单元,从而获得各层单元的误差信号来作为修正各单元权值的依据。 1、基本BP算法的多层感知器模型: 2、BP学习算法的推导:当网络输出与期望输出不等时,存在输出误差E将上面的误差定义式展开至隐层,有进一步展开至输入层,有调整权值的原则是使误差不断地减小,因此应使权值的调整量与误差的梯度下降成正比,即η∈(0,1)表示比例系数,在训练中反应学习速率 BP算法属于δ学习规则类,这类算法被称为误差的梯度下降(Gradient Descent)算法。<实验步骤> 1、用Matlab编程,实现解决该问题的单样本训练BP网络,设置一个停止迭代的误差Emin和最大迭代次数。在调试过程中,通过不断调整隐层节点数,学习率η,找到收敛速度快且误差小
的一组参数。产生均匀分布在区间[-4,4]的测试样本,输入建立的模型得到输出,与Hermit多项式的期望输出进行比较计算总误差(运行5次,取平均值),并记录下每次迭代结束时的迭代次数。(要求误差计算使用RME,Emin 设置为0、1)程序如下:function dyb %单样本程序 clc; close all; clear; x0=[1:;-4:0、08:4];%样本个 x0(1,:)=-1; x=x0'; yuzhi=0、1;%阈值 j=input('请输入隐层节点数 j = ');%隐层节点数 n=input('请输入学习效率 n = ');%学习效率 w=rand(1,j); w=[yuzhi,w]; %输出层阈值 v=rand(2,j); v(1,:)=yuzhi;%隐层阈值 err=zeros(1,); wucha=0; zhaosheng=0、01*randn(1,);%噪声erro=[]; ERRO=[];%误差,为画收敛曲线准备 Emin=0、1; d=zeros(1,); for m=1: d(m)=hermit(x(m,2));%期望 end; o=zeros(1,); j=zeros(1,j); =zeros(1,j); p=1; q=1; azc=0; acs=0; for z=1:5 while q<30000 Erme=0; for p=1: y=zeros(1,j); for i=1:j j(1,i)=x(p,:)*v(:,i); y(1,i)=1/(1+exp(-j(1,i))); end; y=[-1 y]; o(p)=w*y'+zhaosheng(p);%噪声 wucha = d(p)-o(p); err(1,p)=1/2*wucha^2; erro=[erro,wucha]; for m=1:j+1 w(1,m)=w(1,m)+n*wucha*y(1,m); end; for m=1:j v(:,m)=v(:,m)+n*wucha*w(1,m)*y(1,m)*(1-y(1,m))*x(p,:)'; end q=q+1; end; for t=1:; Erme=Erme+err(1,t); end; err=zeros(1,); Erme=sqrt(Erme/); ERRO=[ERRO,Erme]; if
人工神经网络复习题
《神经网络原理》 一、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+△t)=v(t),(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1)、信息分布存储和容错性。 (2)、大规模并行协同处理。 (3)、自学习、自组织和自适应。 (4)、人工神经元网络是大量的神经元的集体行为,表现为复杂
的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1)、空间相加性;(2)、时间相加性;(3)、阈值作用;(4)、不应期;(5)、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x 的关系如下图,试述它们分别有几个平衡状态,是否为稳定的平衡状态? 答:在图(1)中,有两个平衡状态a 、b ,其中,在a 点曲线斜率|F ’(X)|>1,为非稳定平稳状态;在b 点曲线斜率|F ’(X)|<1,为稳定平稳状态。 在图(2)中,有一个平稳状态a ,且在该点曲线斜率|F ’(X)|>1,为非稳定平稳状态。
人工智能(部分习题答案)
1.什么是人类智能?它有哪些特征或特点? 定义:人类所具有的智力和行为能力。 特点:主要体现为感知能力、记忆与思维能力、归纳与演绎能力、学习能力以及行为能力。 2.人工智能是何时、何地、怎样诞生的? 解:人工智能于1956年夏季在美国Dartmouth大学诞生。此时此地举办的关于用机器模拟人类智能问题的研讨会,第一次使用“人工智能”这一术语,标志着人工智能学科的诞生。 3.什么是人工智能?它的研究目标是? 定义:用机器模拟人类智能。 研究目标:用计算机模仿人脑思维活动,解决复杂问题;从实用的观点来看,以知识为对象,研究知识的获取、知识的表示方法和知识的使用。 4.人工智能的发展经历了哪几个阶段? 解:第一阶段:孕育期(1956年以前);第二阶段:人工智能基础技术的研究和形成(1956~1970年);第三阶段:发展和实用化阶段(1971~1980年);第四阶段:知识工程和专家系统(1980年至今)。 5.人工智能研究的基本容有哪些? 解:知识的获取、表示和使用。 6.人工智能有哪些主要研究领域? 解:问题求解、专家系统、机器学习、模式识别、自动定论证明、自动程序设计、自然语言理解、机器人学、人工神经网络和智能检索等。 7.人工智能有哪几个主要学派?各自的特点是什么? 主要学派:符号主义和联结主义。 特点:符号主义认为人类智能的基本单元是符号,认识过程就是符号表示下的符号计算,从而思维就是符号计算;联结主义认为人类智能的基本单元是神经元,认识过程是由神经元构成的网络的信息传递,这种传递是并行分布进行的。 8.人工智能的近期发展趋势有哪些? 解:专家系统、机器人学、人工神经网络和智能检索。 9.什么是以符号处理为核心的方法?它有什么特征? 解:通过符号处理来模拟人类求解问题的心理过程。 特征:基于数学逻辑对知识进行表示和推理。 11.什么是以网络连接为主的连接机制方法?它有什么特征? 解:用硬件模拟人类神经网络,实现人类智能在机器上的模拟。 特征:研究神经网络。 1.请写出用一阶谓词逻辑表示法表示知识的步骤。 步骤:(1)定义谓词及个体,确定每个谓词及个体的确切含义;(2)根据所要表达的事物或概念,为每个谓词中的变元赋予特定的值;(3)根据所要表达的知识的语义用适当的联接符号将各个谓词联接起来,形成谓词公式。 2.设有下列语句,请用相应的谓词公式把它们表示出来: (1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。 解:定义谓词如下: Like(x,y):x喜欢y。 Club(x):x是梅花。 Human(x):x是人。 Mum(x):x是菊花。 “有的人喜欢梅花”可表达为:(?x)(Human(x)∧Like(x,Club(x))) “有的人喜欢菊花”可表达为:(?x)(Human(x)∧Like(x,Mum(x))) “有的人既喜欢梅花又喜欢菊花”可表达为:(?x)(Human(x)∧Like(x,Club(x))∧ Like(x,Mum(x))) (1)他每天下午都去玩足球。 解:定义谓词如下: PlayFootball(x):x玩足球。 Day(x):x是某一天。 则语句可表达为:(?x)(D(x)→PlayFootball(Ta)) (2)市的夏天既干燥又炎热。 解:定义谓词如下: Summer(x):x的夏天。 Dry(x):x是干燥的。 Hot(x):x是炎热的。 则语句可表达为:Dry(Summer(Taiyuan))∧Hot(Summer(Taiyuan)) (3)所有人都有饭吃。
2008年研究生神经网络试题A卷参考答案
研究生神经网络试题A卷参考答案 一、名词解释(共5题,每题5分,共计25分) 1、泛化能力 答:泛化能力又称推广能力,是机器学习中衡量学习机性能好坏的一个重要指标。泛化能力主要是指经过训练得到的学习机对未来新加入的样本(即测试样本)数据进行正确预测的能力。 2、有监督学习 答:有监督学习又被称为有导师学习,这种学习方式需要外界存在一个“教师”,她可以对一组给定输入提供应有的输出结果,学习系统可根据已知输出与实际输出之间的差值来调节系统参数。 3、过学习 答:过学习(over-fitting),也叫过拟和。在机器学习中,由于学习机器过于复杂,尽管保证了分类精度很高(经验风险很小),但由于VC维太大,所以期望风险仍然很高。也就是说在某些情况下,训练误差最小反而可能导致对测试样本的学习性能不佳,发生了这种情况我们称学习机(比如神经网络)发生了过学习问题。典型的过学习是多层前向网络的BP算法 4、Hebb学习规则 答:如果两个神经元同时兴奋(即同时被激活),则它们之间的突触连接加强。如果用、表示神经元i和j的激活值(输出),表示两个神经元之间的连接权,则Hebb学习规则可以表示为:,这里表示学习速率。Hebb 学习规则是人工神经网络学习的基本规则,几乎所有神经网络的学习规则都可以看作Hebb学习规则的变形。
5、自学习、自组织与自适应性 答:神经网络结构上的特征是处理单元的高度并行性与分布性,这种特征使神经网络在信息处理方面具有信息的分布存储与并行计算而且存储与处理一体化的特点。而这些特点必然给神经网络带来较快的处理速度和较强的容错能力。能力方面的特征是神经网络的自学习、自组织与自性适应性。自适应性是指一个系统能改变自身的性能以适应环境变化的能力,它包含自学习与自组织两层含义。自学习是指当外界环境发生变化时,经过一段时间的训练或感知,神经网络能通过自动调整网络结构参数,使得对于给定输入能产生期望的输出。自组织是指神经系统能在外部刺激下按一定规则调整神经元之间的突触连接,逐渐构建起神经网络。也就是说自组织神经元的学习过程,完全是一种自我学习的过程,不存在外部教师的示教。 二、问答题(共7题,每题8分,共计56分) 1、试述遗传算法的基本原理,并说明遗传算法的求解步骤。 答:遗传算法的基本原理如下:通过适当的编码方式把问题结构变为位串形式(染色体),在解空间中取一群点作为遗传开始的第一代,染色体的优劣程度用一个适应度函数来衡量,每一代在上一代的基础上随机地通过复制、遗传、变异来产生新的个体,不断迭代直至产生符合条件的个体为止。迭代结束时,一般将适应度最高的个体作为问题的解。 一般遗传算法的主要步骤如下: (1) 随机产生一个由确定长度的特征字符串组成的初始群体。 (2) 对该字符串群体迭代的执行下面的步 (a) 和 (b) ,直到满足停止标准: (a) 计算群体中每个个体字符串的适应值; (b) 应用复制、交叉和变异等遗传算子产生下一代群体。 (3) 把在后代中出现的最好的个体字符串指定为遗传算法的执行结果,这个结果可以表示问题的一个解。 2、什么是进化计算?它包括哪些内容?它们的出发点是什么?
人工智能习题&答案-第4章-计算智能1-神经计算-模糊计算
第四章计算智能(1):神经计算模糊计算4-1 计算智能的含义是什么?它涉及哪些研究分支? 贝兹德克认为计算智能取决于制造者提供的数值数据,而不依赖于知识。计算智能是智力的低层认知。 主要的研究领域为神经计算,模糊计算,进化计算,人工生命。 4-2 试述计算智能(CI)、人工智能(AI)和生物智能(BI)的关系。 计算智能是智力的低层认知,主要取决于数值数据而不依赖于知识。人工智能是在计算智能的基础上引入知识而产生的智力中层认知。生物智能,尤其是人类智能,则是最高层的智能。即CI包含AI包含BI 4-3 人工神经网络为什么具有诱人的发展前景和潜在的广泛应用领域? 人工神经网络具有如下至关重要的特性: (1) 并行分布处理 适于实时和动态处理 (2)非线性映射 给处理非线性问题带来新的希望 (3) 通过训练进行学习 一个经过适当训练的神经网络具有归纳全部数据的能力,能够解决那些由数学模型或描述规则难以处理的问题 (4) 适应与集成 神经网络的强适应和信息融合能力使得它可以同时输入大量不同的控制信号,实现信息集成和融合,适于复杂,大规模和多变量系统 (5) 硬件实现 一些超大规模集成是电路实现硬件已经问世,使得神经网络成为具有快速和大规模处理能力的网络。 4-4 简述生物神经元及人工神经网络的结构和主要学习算法。
生物神经元 大多数神经元由一个细胞体(cell body或soma)和突(process)两部分组成。突分两类,即轴突(axon)和树突(dendrite),轴突是个突出部分,长度可达1m,把本神经元的输出发送至其它相连接的神经元。树突也是突出部分,但一般较短,且分枝很多,与其它神经元的轴突相连,以接收来自其它神经元的生物信号。 轴突的末端与树突进行信号传递的界面称为突触(synapse),通过突触向其它神经元发送信息。对某些突触的刺激促使神经元触发(fire)。只有神经元所有输入的总效应达到阈值电平,它才能开始工作。此时,神经元就产生一个全强度的输出窄脉冲,从细胞体经轴突进入轴突分枝。这时的神经元就称为被触发。突触把经过一个神经元轴突的脉冲转化为下一个神经元的兴奋或抑制。学习就发生在突触附近。 每个人脑大约含有10^11-10^12个神经元,每一神经元又约有10^3-10^4个突触。神经元通过突触形成的网络,传递神经元间的兴奋与抑制。大脑的全部神经元构成极其复杂的拓扑网络群体,用于实现记忆与思维。 人工神经网络的结构 人工神经网络由神经元模型构成。每个神经元具有单一输出,并且能够与其它神经元连接,存在许多输出连接方法,每种连接方法对应于一个连接权系数。 人工神经网络的结构分为2类, (1)递归(反馈)网络 有些神经元的输出被反馈至同层或前层神经元。信号能够从正向和反向流通。Hopfield网络,Elmman网络和Jordan网络是代表。 (2) 前馈网络 具有递阶分层结构,由一些同层神经元间不存在互连的层级组成。从输入层至输出层的信号通过单向连接流通,神经元从一层连接至下一层,不存在同层神经元之间的连接。多层感知器(MLP),学习矢量量化网络(LVQ),小脑模型连接控制网络(CMAC)和数据处理方法网络(GMDH)是代表。 人工神经网络的主要学习算法 (1) 指导式(有师)学习 根据期望和实际的网络输出之间的差来调整神经元连接的强度或权。包括Delta规则,广义Delta规则,反向传播算法及LVQ算法。 (2) 非指导(无导师)学习 训练过程中,神经网络能自动地适应连接权,以便按相似特征把输入模式分组聚集。包括
神经网络基于BP网络的多层感知器实验报告
神经网络及应用实验报告 实验二、基于BP网络的多层感知器 一:实验目的: 1. 理解多层感知器的工作原理 2. 通过调节算法参数了解参数的变化对于感知器训练的影响 3. 了解多层感知器局限性 二:实验原理: BP的基本思想:信号的正向传播误差的反向传播 –信号的正向传播:输入样本从输入层传入,经各隐层逐层处理后,传向输出层。 –误差的反向传播:将输入误差以某种形式通过隐层向输入层逐层反传,并将误差分摊给各层的所有单元,从而获得各层单元的误差信号来作为修正各单元权值的依据。 1.基本BP算法的多层感知器模型: 学习算法的推导: 当网络输出与期望输出不等时,存在输出误差E 将上面的误差定义式展开至隐层,有 进一步展开至输入层,有 调整权值的原则是使误差不断地减小,因此应使权值的调整量与误差的梯度下降成正比,
即 η∈(0,1)表示比例系数,在训练中反应学习速率 BP算法属于δ学习规则类,这类算法被称为误差的梯度下降(Gradient Descent)算法。<实验步骤> 1. 用Matlab编程,实现解决该问题的单样本训练BP网络,设置一个停止迭代的误差E min 和最大迭代次数。在调试过程中,通过不断调整隐层节点数,学习率η,找到收敛速度快且误差小的一组参数。产生均匀分布在区间[-4,4]的测试样本,输入建立的模型得到输出,与Hermit多项式的期望输出进行比较计算总误差(运行5次,取平均值),并记录下每次迭代结束时的迭代次数。 (要求误差计算使用RME,Emin 设置为) 程序如下: function dyb %单样本程序 clc; close all; clear; x0=[1:101;-4::4];%样本101个 x0(1,:)=-1; x=x0';
多层前馈神经网络new
5 多层前馈网络及BP 算法 多层前馈网络的反向传播 (BP )学习算法,简称BP 算法,是有导师的学习,它是梯度下降法在多层前馈网中的应用。 (a ) 网络结构 见下图,u 、 y 是网络的输入、输出向量,神经元用节点表示,网络由 输入层、隐层和输出层节点组成,隐层可一层,也可多层(图中是单隐层),前层至后层节点通过权联接。由于用BP 学习算法,所以常称BP 神经网络。 :x 每个神经元(节点)的输入;:y 每个神经元(节点)的输出;:j I 神经元 的第 j 个输入。:ij w 神经元j 到神经元i 的连接权 节点的作用函数:)(θ-=x f y , θ 为阈值(可设置一个偏置节点代替θ) f 可为线性函数,一般取为Sigmoid 函数 ξ /11x e -+, ξ为很小的数,如0.1 (b ) BP 学习算法 ? 已知网络的输入/输出样本,即导师信号。 ? BP 学习算法由正向传播和反向传播组成: ? 正向传播是输入信号从输入层经隐层,传向输出层,若输出层得到了期望的输出,则学习算法结束;否则,转至反向传播。 ? 反向传播是将误差(样本输出与网络输出之差)按原联接通路反向计算,由梯度下降法调整各层节点的权值和阈值,使误差减小。 BP 学习算法步骤如下: (1) 设置初始权值)0(W ,它是较小的随机非零值。
(2) 给定输入/输出样本对,计算网络的输出。 设第p 组样本输入:()np p p p u u u u ,...,,21= 输出:()L p d d d d m p p p p ,..,2,1,,...,,21== 节点i 在第 p 组样本输入时,输出为 ip y : ()?? ? ???==∑j jp ij ip ip I t w f t x f t y )()()( ----(1式) 式中,jp I 是在第 p 组样本输入时,节点 i 的第j 个输入。 )(?f 取可微的s 型作用函数式 )(x f = x e -+11 -------(2式) 可由输入层隐层至输出层,求得网络输出层节点的输出。 (1) 计算网络的目标函数 J 设p E 为在第 p 组样本输入时,网络的目标函数,取2L 范数,则 ∑∑=-=-= k kp k kp kp p p p t e t y d t y d t E )(21)]([21||)(||21)(2 222--------(3式) 式中, )(t y p 是在第p 组样本输入时,经t 次权值调整后网络的输出:k 是 输出层第k 个节点。 网络的总目标函数: )(t J =∑p p t E )( ----------(4式) 作为对网络学习状况的评价。 (2) 判别 若 )(t J ≤ε -------(5式) 算法结束;否则,至步骤(4)。式中,ε是预先确定的,0>ε. (3) 反向传播计算 由输出层,依据 J ,按梯度下降法反向计算,可逐层调整权值。 由式() k k k k k a a J a a ??-=+η1,取步长为常值,可得到神经元j 到神经元i 的
人工智能习题作业神经计算I习题答案
第五章 神经网络课后习题及答案 一、选择题: 1. 在BP算法中,设y=f(xi)为xi的平滑函数,想知道xi对y增大变化的情况, 我们可求 ,然后进行下列的哪一项? ( B ) A 取最小 B 取最大 C 取积分 D 取平均值 2. 对于反向传播学习,无论是在识别单个概念的学习或识别两个概念的学习中,都涉及到下列的哪一个操作? ( A ) A 权值的修正 B 调整语义结构 C 调整阀值 D 重构人工神经元 3. 根据Hopfield网络学习的特点,能实现联想记忆和执行线性和非线性规划等求解问题其应用没有涉及到下列的哪一个内容? ( D ) A 模糊推理模型 B 非线性辨认 C 自适应控制模型 D 图象识别 4. 对于神经网络的二级推理产生式规则由三个层次构成,它不含下列的哪一个层次? ( C ) A 输入层 B 输出层 C 中间层 D 隐层 5. 人工神经网络借用了生理神经元功能的一些描述方式,它涉及到下列的哪一些内容? ( ABC ) A 模拟神经元 B 处理单元为节点 C 加权有向图 D 生理神经元连接而成
6. 在应用和研究中采用的神经网络模型有许多种,下列的哪一些是具有代表性的? ( ABD ) A 反向传递(BP) B Hopfield网 C 自适应共振 D 双向联想存储器 7. 下列的哪一些内容与反向传播学习算法有关? ( ABCD ) A 选取比率参数 B 误差是否满足要求 C 计算权值梯度 D 权值学习修正 8. 构造初始网络后,要用某种学习算法调整它的权值矩阵,使NN在功能上满足样例集给定的输入一输出对应关系,并由此产生推理,该矩阵必须满足下列的哪一个性质? ( A ) A 收敛性 B 对称性 C 满秩性 D 稀疏性 9. 在人工神经元的功能描述中,往往会用一激发函数来表示输出,常用的一般非线性函数有下列的哪一些项? ( ABD ) A 阀值型 B 分段线性强饱和型 C 离散型 D S i gm oid型 10. 基于神经网络的推理,其应用中必须涉及到下列的哪一些内容? ( ACD ) A NN的结构模型 B NN的推理规则 C NN的学习算法 D 从NN到可解释的推理网 二、填空题: 1. 前馈网络是一种具有很强学习能力的系统,结构简单,易于编程。前馈网络通
神经网络实例--对正弦函数拟合
%利用神经网络工具箱对一个正弦函数进行拟合,源码如下: clc clear close all %----------------------------------------------- %产生训练样本与测试样本 P1=1:2:200; %训练样本,每一列为一个样本 T1=sin(P1*0.1); %训练目标 P2=1:2:200; %测试样本,每一列为一个样本 T2=sin(P2*0.1); %测试目标 %------------------------------------------------ %归一化 [PN1,minp,maxp,TN1,mint,maxt] = premnmx(P1,T1); PN2=tramnmx(P2,minp,maxp); TN2=tramnmx(T2,mint,maxt); %------------------------------------------- %设置网络参数 NodeNum = 20; %隐藏节点数 TypeNum = 1; %输出维数 TF1='tansig'; TF2='purelin'; %判别函数(缺省值) net=newff(minmax(PN1),[NodeNum TypeNum],{TF1 TF2}); %------------------------------------------------------ %指定训练参数 net.trainFcn='trainlm'; net.trainParam.show=20; %训练显示间隔 net.trainParam.lr=0.3; %学习步长-traubgd,traubgdm net.trainParam.mc=0.95; %动量项系数-traingdm,traingdx net.trainParam.mem_reduc=1; %分块计算Hessian矩阵(仅对Levenberg-Marquardt算法有效) net.trainParam.epochs=1000; %最大训练次数 net.trainParam.goal=1e-8; %最小均方误差 net.trainParam.min_grad=1e-20; %最小梯度 net.trainParam.time=inf; %最大训练时间 %------------------------------------------------------- %训练 net=train(net,PN1,TN1); %训练 %-------------------------------------------------- %测试 YN1=sim(net,PN1); %训练样本实际输出 YN2=sim(net,PN2); %测试样本实际输出 MSE1=mean((TN1-YN1).^2); MSE2=mean((TN2-YN2).^2);
人工智能部分习题答案
人工智能部分习题答案 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
1.什么是人类智能它有哪些特征或特点 定义:人类所具有的智力和行为能力。 特点:主要体现为感知能力、记忆与思维能力、归纳与演绎能力、学习能力以及行为能力。 2.人工智能是何时、何地、怎样诞生的 解:人工智能于1956年夏季在美国Dartmouth大学诞生。此时此地举办的关于用机器模拟人类智能问题的研讨会,第一次使用“人工智能”这一术语,标志着人工智能学科的诞生。 3.什么是人工智能它的研究目标是 定义:用机器模拟人类智能。 研究目标:用计算机模仿人脑思维活动,解决复杂问题;从实用的观点来看,以知识为对象,研究知识的获取、知识的表示方法和知识的使用。 4.人工智能的发展经历了哪几个阶段 解:第一阶段:孕育期(1956年以前);第二阶段:人工智能基础技术的研究和形成(1956~1970年);第三阶段:发展和实用化阶段(1971~1980年);第四阶段:知识工程和专家系统(1980年至今)。 5.人工智能研究的基本内容有哪些 解:知识的获取、表示和使用。 6.人工智能有哪些主要研究领域 解:问题求解、专家系统、机器学习、模式识别、自动定论证明、自动程序设计、自然语言理解、机器人学、人工神经网络和智能检索等。 7.人工智能有哪几个主要学派各自的特点是什么 主要学派:符号主义和联结主义。 特点:符号主义认为人类智能的基本单元是符号,认识过程就是符号表示下的符号计算,从而思维就是符号计算;联结主义认为人类智能的基本单元是神经元,认识过程是由神经元构成的网络的信息传递,这种传递是并行分布进行的。 8.人工智能的近期发展趋势有哪些 解:专家系统、机器人学、人工神经网络和智能检索。 9.什么是以符号处理为核心的方法它有什么特征 解:通过符号处理来模拟人类求解问题的心理过程。 特征:基于数学逻辑对知识进行表示和推理。 11.什么是以网络连接为主的连接机制方法它有什么特征 解:用硬件模拟人类神经网络,实现人类智能在机器上的模拟。 特征:研究神经网络。 1.请写出用一阶谓词逻辑表示法表示知识的步骤。 步骤:(1)定义谓词及个体,确定每个谓词及个体的确切含义;(2)根据所要表达的事物或概念,为每个谓词中的变元赋予特定的值;(3)根据所要表达的知识的语义用适当的联接符号将各个谓词联接起来,形成谓词公式。 2.设有下列语句,请用相应的谓词公式把它们表示出来: (1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。 解:定义谓词如下: Like(x,y):x喜欢y。 Club(x):x是梅花。 Human(x):x是人。 Mum(x):x是菊花。 “有的人喜欢梅花”可表达为:(?x)(Human(x)?Like(x,Club(x))) “有的人喜欢菊花”可表达为:(?x)(Human(x)?Like(x,Mum(x))) “有的人既喜欢梅花又喜欢菊花”可表达为:(?x)(Human(x)?Like(x,Club(x))? Like(x,Mum(x))) (1)他每天下午都去玩足球。 解:定义谓词如下: PlayFootball(x):x玩足球。 Day(x):x是某一天。 则语句可表达为:(?x)(D(x)?PlayFootball(Ta)) (2)太原市的夏天既干燥又炎热。 解:定义谓词如下:
神经网络应用实例
神经网络 在石灰窑炉的建模与控制中的应用神经网络应用广泛,尤其在系统建模与控制方面,都有很好应用。下面简要介绍神经网络在石灰窑炉的建模与控制中的应用,以便更具体地了解神经网络在实际应用中的具体问题和应用效果。 1 石灰窑炉的生产过程和数学模型 石灰窑炉是造纸厂中一个回收设备,它可以使生产过程中所用的化工原料循环使用,从而降低生产成本并减少环境污染。其工作原理和过程如图1所示,它是一个长长的金属圆柱体,其轴线和水平面稍稍倾斜,并能绕轴线旋转,所以又 CaCO(碳酸钙)泥桨由左端输入迴转窑,称为迴转窑。含有大约30%水分的 3 由于窑的坡度和旋转作用,泥桨在炉内从左向右慢慢下滑。而燃料油和空气由右端喷入燃烧,形成气流由右向左流动,以使泥桨干燥、加热并发生分解反应。迴转窑从左到右可分为干燥段、加热段、煅烧段和泠却段。最终生成的石灰由右端输出,而废气由左端排出。 图1石灰窑炉示意图 这是一个连续的生产过程,原料和燃料不断输入,而产品和废气不断输出。在生产过程中首先要保证产品质量,包括CaO的含量、粒度和多孔性等指标,因此必须使炉内有合适的温度分布,温度太低碳酸钙不能完全分解,会残留在产品中,温度过高又会造成生灰的多孔性能不好,费燃料又易损坏窑壁。但是在生产过程中原料成分、含水量、进料速度、燃油成分和炉窑转速等生产条件经常会发生变化,而且有些量和变化是无法实时量测的。在这种条件下,要做到稳定生产、高质量、低消耗和低污染,对自动控制提出了很高的要求。 以前曾有人分析窑炉内发生的物理-化学变化,并根据传热和传质过程来建立窑炉的数学模型,认为窑炉是一个分布参数的非线性动态系统,可以用二组偏
人工智能习题答案
(此文档为Word格式,下载后可以任意编辑修改!)试卷装订封面
第一章绪论 1-1. 什么是人工智能?试从学科和能力两方面加以说明。 从学科角度来看:人工智能是计算机科学中涉及研究、设计和应用智能机器的一个分支。它的近期主要目标在于研究用机器来模仿和执行人脑的某些智能功能,并开发相关理论和技术。 从能力角度来看:人工智能是智能机器所执行的通常与人类智能有关的功能,如判断、推理、证明、识别、感知、理解、设计、思考、规划、学习和问题求解等思维活动 1-2. 在人工智能的发展过程中,有哪些思想和思潮起了重要作用?控制论之父维纳1940 年主张计算机五原则。他开始考虑计算机如何能像大脑一样工作。系统地创建了控制论,根据这一理论,一个机械系统完全能进行运算和记忆。 帕梅拉?麦考达克(Pamela McCorduck)在她的著名的人工智能历史研究《机器思维》(Machine Who Think,1979) 中曾经指出:在复杂的机械装置与智能之间存在着长期的联系。著名的英国科学家图灵被称为人工智能之父,图灵不仅创造了一个简单的通用的非数字计算 模型,而且直接证明了计算机可能以某种被理解为智能的方法工作。提出了著名的图灵测试。数理逻辑从19 世纪末起就获迅速发展;到20 世纪30 年代开始用于描述智能行为。计算机出现后,又在计算机上实现了逻辑演绎系统。 1943年由生理学家麦卡洛克(McCulloch)和数理逻辑学家皮茨(Pitts)创立的脑模型,即MP模型。60-70年代,联结主义,尤其是对以感知机(perceptron)为代表的脑模型的研究曾出现过 热潮, 控制论思想早在40-50 年代就成为时代思潮的重要部分,影响了早期的人工智能工作者。到 60-70 年代,控制论系统的研究取得一定进展,播下智能控制和智能机器人的种子。 1-3. 为什么能够用机器(计算机)模仿人的智能? 物理符号系统的假设:任何一个系统,如果它能够表现出智能,那么它就必定能执行输入符号、输出符号、存储符号、复制符号、建立符号结构、条件性迁移6种功能。反之,任何系 统如果具有这 6 种功能,那么它就能够表现出智能(人类所具有的智能)。 物理符号系统的假设伴随有3个推论。 推论一: 既然人具有智能,那么他(她)就一定是个物理符号系统。 推论二: 既然计算机是一个物理符号系统,它就一定能够表现出智能。 推论三: 既然人是一个物理符号系统,计算机也是一个物理符号系统,那么我们就能够用计 算机来模拟人的活动。 1-4. 现在人工智能有哪些学派?它们的认知观是什么?符号主义(Symbolicism) ,又称为逻辑主义(Logicism) 、心理学派(Psychlogism) 或计算机学派(Computerism) [ 其原理主要为物理符号系统( 即符号操作系统)假设和有限合理性原理。] 认为人的认知基元是符号,而且认知过程即符号操作过