电流滞环控制pwm.
电流滞环控制的三相PWM逆变器仿真
11级三班8号XX
摘要
针对传统的SPWM电压型逆变器的不足,提出采用电流滞环跟踪PWM的逆变器控制方式。介绍了电流滞环跟踪PWM逆变器的控制原理,对其开关频率进行了数学分析,最后构建模型并进行仿真。仿真结果表明,此方法效果明显,动态性能好,可保证电流波形好的正弦性。
关键词:电流滞环控制、三相PWM逆变器、开关频率、simulink
一、引言
三相PWM逆变器中的滞环电流控制因其控制方式简单、易于硬件实现、工作可靠、无跟踪误差、动态响应快等优点,得到了广泛的重视与应用。PWM(Pulse Width Modulation)控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,但是在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。
电流滞环跟踪控制方法的精度高,响应快,且易于实现。但受功率开关器件允许开关频率的限制,仅在电机堵转且在给定电流峰值处才发挥出最高开关频率,在其他情况下,器件的允许开关频率都未得到充分利用。为了克服这个缺点,可以采用具有恒定开关频率的电流控制器,或者在局部范围内限制开关频率,但这样对电流波形都会产生影响。
二、电流滞环跟踪控制原理
2.1电流滞环控制原理
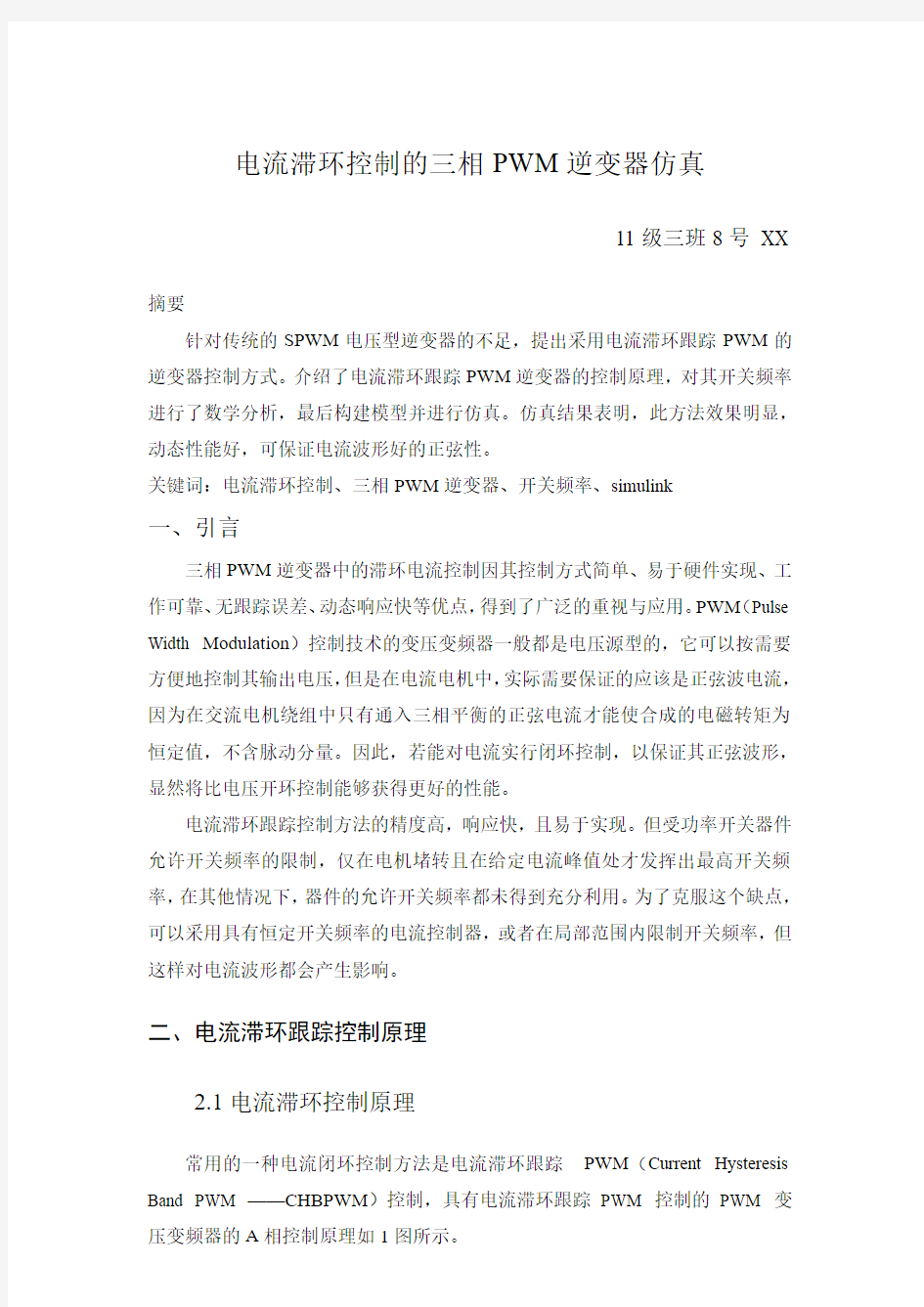
常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。
图1 电流滞环跟踪控制的A 相原理图
图中,电流控制器是带滞环的比较器,环宽为2h 。将给定电流 *a i 与输出
电流 a i 进行比较,电流偏差 ? a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。B 、C 二相的原理图均与此相同。采
用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动
上桥臂功率开关器件V1导通,变压变频器输出正电压,使a i 增大。当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大
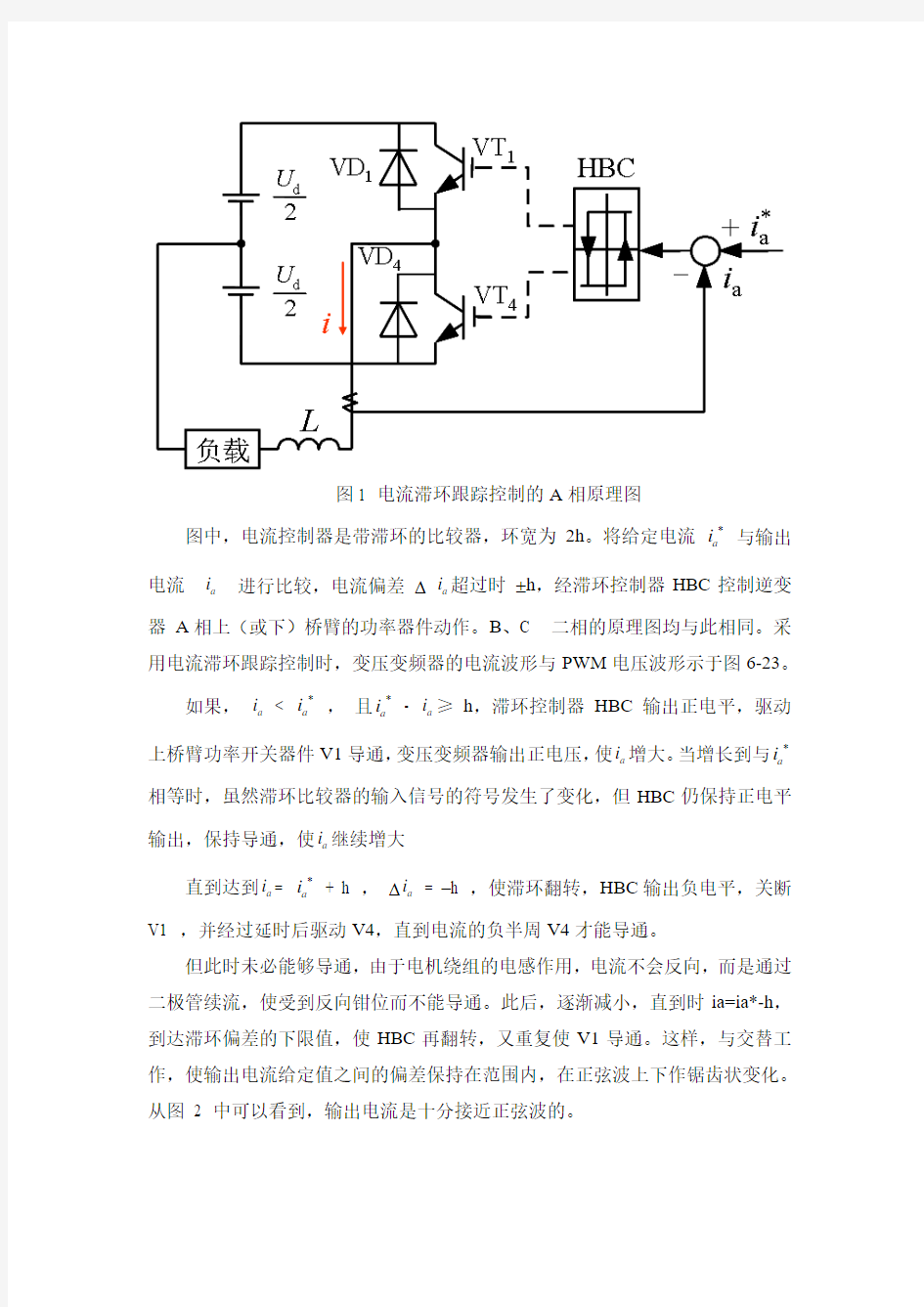
直到达到a i = *a i + h , ?a i = –h ,使滞环翻转,HBC 输出负电平,关断
V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。
但此时未必能够导通,由于电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时ia=ia*-h ,到达滞环偏差的下限值,使HBC 再翻转,又重复使V1导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。
图2 电流滞环跟踪控制时的电流波形
图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
2.2 三相电流滞环控制原理
图3 三相电流跟踪型PWM逆变电路
图4 三相电流跟踪型PWM逆变电路输出波形因此,输出相电压波形呈PWM状,但与两侧窄中间宽的SPWM波相反,两侧增宽而中间变窄,这说明为了使电流波形跟踪正弦波,应该调整一下电压波形。
电流跟踪控制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。这是一对矛盾的因素,实用中,应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
采用滞环比较方式的电流跟踪型PWM交流电路有以下特点:
1.硬件电路简单;
2.属于事实控制方式,电流反应快;
3.不需要载波,输出电压波形中不含有特定频率的谐波分量;
4.和计算法及调制法相比,相同开关频率时输出电流中高次谐波含量较
多;
5.闭环控制,这是各种跟踪型PWM交流电路的共同特点。
三、三相电流的滞环跟踪控制的simulink的仿真
3.1 simulink模块仿真图
图5封装后的电路图
图6 控制电路图参数封装及其内部电路图
图7 主电路图参数封装及其内部电路图
3.2 仿真波形
第一次设置的参数为:
1.控制电路中:给定的电流幅值Im=10A、频率f=50HZ;滞环比较器的环宽2h=4;
2.主电路中:直流电源电压U=300V;负载R=3Ω,L=0.008H;
A相电流FFT分析
第二次设置的参数为:
1.控制电路中:给定的电流幅值Im=10A、频率f=50HZ;滞环比较器的环宽2h=8;
2.主电路中:直流电源电压U=300V;负载R=3Ω,L=0.008H;
A相电流FFT波分析
四、仿真结果分析与总结
4.1仿真波形比较
由上述两组波形比较可知,当环宽2h=4时,其触发脉冲波形比2h=8时要更密集,即触发频率快,对IGBT的开关频率高;电流跟踪效果明显比2h=8时的要好,其总谐波失真也要比2h=8时小,但是可以看出在一个周期内,其电流在环宽内变化的次数也明显比2h=8时多,这与上面触发频率快相一致;其输出相电压波形同样体现出2h=4时的开关频率比2h=8时的快,由波形的疏密容易
看出。
4.2电流频谱分析比较
由仿真出的电流波形的频谱图对比可知,当环宽较小(2h=4)时,电流的基波分量的峰值接近于给定电流峰值(12),且总谐波失真(THD)较小为0.08%;而当环宽较大(2h=8)时,电流的基波分量的峰值较大一些,且总谐波失真(THD)较大为1.88%.
4.3总结及心得体会
通过实验分析和理论学习可知,环宽过宽时,开关频率低,跟踪误差大;环宽过窄时,跟踪误差小,但开关频率过高,开关损耗增大。
L大时,i的变化率小,跟踪慢;
L小时,i的变化率大,开关频率过高
所以在现实应用中,应该根据所给开关器件如IGBT的开关频率范围来选择环宽的大小,一般在开关频率允许的条件下,尽可能地选择小的环宽,这样输出的电流波形质量越高。当所给环宽小时,电流跟踪控制的精度高,电流跟踪效果好,同时电流的谐波分量也少,但是对IGBT的开关频率要求高;当所给环宽大时,电流跟踪控制的精度就减小了,电流跟踪的效果也变差,电流的谐波分量也高,不过降低了对IGBT的开关频率要求。
通过本次作业,不仅对以往电力电子所学进行了一次有效的复习,同时也加强了自身对simulink软件的应用,在进行实验仿真的过程中对以往的知识得到了巩固,也提升自己对新知识的学习能力,收获很大。
滞环控制
电流滞环跟踪PWM(CHBPWM)控制技术的仿真 桂寒 120100068 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink 工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2. 应用PWM 控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 2. 电流滞环跟踪控制原理 2.1 单相电流滞环控制原理 常用的一种电流闭环控制方法是电流滞环跟踪 PWM (Current Hysteresis Band PWM ——CHBPWM )控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。 图1 电流滞环跟踪控制的A 相原理图 图中,电流控制器是带滞环的比较器,环宽为2h 。将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ? a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。B 、C 二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
? 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功 率开关器件V1导通,变压变频器输出正电压,使a i 增大。当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ? 直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。 但此时未必能够导通,由于电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时ia=ia*-h ,到达滞环偏差的下限值,使HBC 再翻转,又重复使V1导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。 2.2 三相电流滞环控制原理 图3 三相电流跟踪型PWM 逆变电路
三相电压型PWM整流器及仿真
三相电压型PWM整流器及仿真
————————————————————————————————作者:————————————————————————————————日期:
电力电子课程设计课程设计报告 题目:三相电压型PWM整流器与仿真 专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月 6 日 内容得分 1、三相桥式电路的基本原理(10分) 2、整流电路基本原理(10分) 3、pwm控制的基本原理(10分 4、三相电压型pwm整流电路仿真模型(30分) 5、结果分析(30分) 6、程序文件(10分) 总分
摘要:叙述了建立三相电压型PWM整流器的数学模型。在此基础上,使用功能强大的MATLAB软件进行了仿真,仿真结果证明了方法的可行性。 关键词:整流器;PWM;simulink
目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (4) 2.3 pwm控制的基本原理 (6) 2.4 PWM整流器的发展现状 (6) 三设计内容 (8) 3.1 仿真模型 (8) 3.2 各个元件参数 (11) 3.3 仿真结果 (13) 3.4 结果分析 (15) 四总结 (15) 五参考文献 (15)
一任务书 1.1 题目 三相电压型PWM整流器仿真 1.2 设计内容及要求 设计三相电压型PWM整流器及其控制电路的主要参数,并使用MATLAB软件搭建其仿真模型并验证。 设计要求(pwm整流器仿真模型参数): (1)交流电源电压600V,60HZ (2)短路电容30MVA (3)外接负载500kVar,1MW (4)变压器变比 600/240V (5)0.05s前,直流负载200kw,直流电压500V,0.05s后,通过断路器并联一个相同大小的电阻。 1.3 报告要求 (1)叙述三相桥式电路的基本原理 (2)叙述整流电路基本原理 (3)叙述pwm控制的基本原理 (4)记录参数(截图) (5)记录仿真结果,分析滤波结果 (6)撰写设计报告 (7)提交程序源文件
电流滞环跟踪PWM(CHBPWM)控制技术的仿真要点
目录 摘要 (1) 关键词 (1) 一、电流滞环跟踪控制原理 (2) 二、三相电流滞环跟踪控制系统的仿真 (5) 1、建立系统仿真模型 (5) 2、模块参数设置 (6) 3、电路封装 (8) 4、作图程序设计 (10) 三、仿真波形及频谱分析 (12) 四、仿真结果分析与总结 (18) 1、仿真波形比较 (18) 2、电流频谱分析比较 (19) 3、相电压、线电压频谱分析比较 (19) 4、总结 (19) 五、课设心得体会 (20) 六、参考文献 (21)
摘要: 滞环控制是一种应用很广的闭环电流跟踪控制方法,通常以响应速度快和结构简单而著称。在各种变流器控制系统中,滞环控制单元一般同时兼有两种职能,一则作为闭环电流调节器,二则起着PWM调制器的作用,将电流参考信号转换为相应的开关指令信号。然而,滞环控制的开关频率一般具有很大的不定性,高低频率悬殊,其开关频率范围往往是人们在进行滞环控制系统设计师比较关心的重要方面,只有明确开关频率的计算方法,才便于进行开关器件、滤波参数及滞环控制参数的选择。 电流跟踪型逆变器输出电流跟随给定的电流波形变化,这也是一种PWM控制方式。电流跟踪一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减小,将输出电流与给定电流的偏差控制在一定范围内。 关键词:电流滞环跟踪PWM、闭环控制、滞环控制器HBC、环宽、电流偏差、开关频率、响应波形、频谱图
一、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图4。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而
电流滞环跟踪spwm
课程设计(论文)任务书 电气与电子工程学院电力牵引与传动专业班一、课程设计(论文)题目:电流滞环跟综PWM(CHBPWM)控制技术的仿真 二、课程设计(论文)工作自 2013年6月16日起至2013年6月21日止。 三、课程设计(论文) 地点: 电气学院机房 四、课程设计(论文)内容要求: 1.本课程设计的目的 (1)熟练掌握MATLAB语言的基本知识和技能; (2)熟悉matlab下的simulink和simpowersystems工具箱; (3)熟悉构建三相电流跟踪滞环控制系统的仿真模型; (4)培养分析、解决问题的能力;提高学生的科技论文写作能力。2.课程设计的任务及要求 1)基本要求: (1)要求对主电路和脉冲电路进行封装; (2)仿真参数为:E=100-300V; f=50HZ; 带宽2h; 步长h=0.0001s,其他参数自定; (3)给出调制波原理图、相电压、相电流、线电压、不同器件所承受的电压波形以及频谱图,要求采用subplot作图; (4)选取不同参数进行仿真,比较仿真结果有何变化,给出自己的结论。2)创新要求: 封装使仿真模型更加美观、合理 3)课程设计论文编写要求 (1)要按照课程设计模板的规格书写课程设计论文 (2)论文包括目录、正文、心得体会、参考文献等 (3)课程设计论文用B5纸统一打印,装订按学校的统一要求完成 4)答辩与评分标准: (1)完成原理分析:20分; (2)完成设计过程:40分; (3)完成调试:20分; (4)回答问题:20分; 5)参考文献: (1)刘卫国.MATLAB程序设计与应用(第二版). 北京:高等教育出版社,2008. (2)刘志刚.电力电子学.北京:清华大学出版社、北京交通大学出版社,2004.
PWM电流源型变流器
电力电子学大作业 题目:PWM流源型变流器学院:电气与电子工程学院专业:电力电子与电力传动学生姓名: 授课教师: 2011年6 月7日
PWM电流源型变流器 摘要:本文对PWM电流源型逆变器(CSI)和PWM电流源型整流器(CSR)进行了深入研究。根据两者的谐波特性,都采用用了特定谐波消除(SHE)这中调制方法。通过Matlab/Simulink仿真得到相关波形,并由此结果可知特定谐波消除法对PWM电流源型变流器而言是一种非常有效的调制方法。 关键词:SHE、电流源型、逆变、整流 随着门极换相晶闸管(GCT)器件的出现,中压传动系统中越来越多的使用PWM电流源型变流器。PWM电流源型变流器分为PWM电流源型逆变器和PWM电流源型整流器。前者具有拓扑结构简单、输出波形好、短路保护可靠等优点,在中压传动系统中使用得非常广泛;后者具有功率因数高、进线电流畸变程度低、动态响应性能好等特点。 本文分别对PWM电流源型逆变器和PWM电流源型整流器进行了介绍,两者都采用了SHE调制法。本文还将对这个调制方法进行详细介绍,并分析采用该调制法的两种变流器的谐波特性。 1.PWM电流源型逆变器 1.1 逆变器结构 图1 理想的PWM电流源型逆变器 如图1所示为理想化的PWM电流源型逆变器,它由6个GCT器件构成逆变器,且此GCT是具有反阻断能力的对称型结构。在中压传动系统中,这6个GCT器件还可以由两个或更多个器件串联代替。直流输入侧是一个理想的电流源。在实际应用中,电流源可以用电流源型整流器实现。 输入端引入的三相电容是用来帮助开关器件换相的。当开关关断的瞬间,逆变器输出的电流必须在很短的时间内减小到零,电容则为储存在负载电感中的能量提供电流通路,否则可能产生很高的电压尖峰,并导致功率开关器件损坏。同时,此电容还可以起滤波的作用,以改善输出电流、电压波形。且电容值可以随
电流滞环跟踪PWM仿真
题目七电流滞环跟踪PWM(CHBPWM)控制技术 的仿真 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制脉宽控制滞环宽度控制法 一、前言 应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 二、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图
图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和
电流滞环控制pwm
电流滞环控制的三相PWM逆变器仿真 11级三班8号XX 摘要 针对传统的SPWM电压型逆变器的不足,提出采用电流滞环跟踪PWM的逆变器控制方式。介绍了电流滞环跟踪PWM逆变器的控制原理,对其开关频率进行了数学分析,最后构建模型并进行仿真。仿真结果表明,此方法效果明显,动态性能好,可保证电流波形好的正弦性。 关键词:电流滞环控制、三相PWM逆变器、开关频率、simulink 一、引言 三相PWM逆变器中的滞环电流控制因其控制方式简单、易于硬件实现、工作可靠、无跟踪误差、动态响应快等优点,得到了广泛的重视与应用。PWM(Pulse Width Modulation)控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,但是在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 电流滞环跟踪控制方法的精度高,响应快,且易于实现。但受功率开关器件允许开关频率的限制,仅在电机堵转且在给定电流峰值处才发挥出最高开关频率,在其他情况下,器件的允许开关频率都未得到充分利用。为了克服这个缺点,可以采用具有恒定开关频率的电流控制器,或者在局部范围内限制开关频率,但这样对电流波形都会产生影响。 二、电流滞环跟踪控制原理 2.1电流滞环控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。
一种电流型PWM控制芯片的设计
2007年第 24卷第 8期微电子学与计算机 1引言 目前 , 国内 DC-DC 电源需求量日益增大。 DC-DC 转换器分为线性电源和开关型电源。开关型电源的调整管工作在开关状态 , 功耗小 , 效率高 , 因此在计算机、通信、雷达、电子仪器以及家用电器等电子领域有着广泛的应用前景。文中设计并实现了一种高性能的 PWM 控制芯片 , 主要用于开关型 DC-DC 电源的功率控制。该芯片采用可调整的带隙基准源 , 具有基准电压精度高、温漂低的优点。电流型反馈模式的采用使其与传统电压模式的 PWM 控制器相比 , 具有系统动态响应快的明显优点。芯片结构设计合理 , 控制功能齐全 , 为 DC-DC 电源系统提供了高性能的关键芯片。 2电路工作原理及其电流型反馈模式 如图 1所示 , 虚线框内为本电路的设计内容 , 框外是其典型应用的简化电路。本电路的主要模块包括电压基准、振荡器、误差放大器、电流检测比较器、PWM 锁存器、欠压锁定电路、输出级电路和过压保护电路等。 电路工作原理如下 :系统的输出电压 V O U T 经过分压处理作为误差放大器的输入 , 与内部电压基准模块提供的 2.5V 基准电压比较后产生误差电压 , 而变压器初级线圈 (电感的电流在采样电阻上产生 的电压降 V IO U T 作为电流检测比较器的输入 , 与误差放大器产生的误差电压进行比较 , 经过PWM 锁存器和输出级的功率放大 , 输出 PWM 控制信号 Out- 一种电流型 PWM 控制芯片的设计
师娅 , 唐威 (西安微电子技术研究所 , 陕西西安 710054 摘要 :设计并实现了一种高性能的功能齐全的电流型 PWM 控制芯片。电路采用可调整的带隙基准源和电流型反馈模式 , 具有基准精度高、温漂低、系统动态响应快等优点。电路的输出级驱动电流可达 1A , 开关频率可达 500kHz , 具有过压、过流保护和欠压锁定的功能。 关键词 :PWM 控制器 ; 带隙基准 ; 电流型 中图分类号 :TN4文献标识码 :A 文章编号 :1000-7180(2007 08-0145-04 Design of Current-Mode PWM Controller SHI Ya , TANG Wei (Xi ′ an Microelectronic Technology Institute, Xi ′ an 710054, China Abstract :A high performance current mode PWM controller chip is implemented in this paper. High precision, low temperature coefficent and fast dynamic response is achieved by using adjustable bandgap reference and current mode of control in this chip. In addition, The PWM controller can reach up to output current of 1A and switching frequency of 500kHz, and has function such as UVLO, over-voltage and over-current protecting. Key words :PWM controller ; bandgap reference ; current mode 收稿日期 :2006-11-23 145 微电子学与计算机 2007年第 24卷第 8期
电流型PWM IC
UC3844是美国Unitrode公司(已被TI公司收购)生产的高性能电流型脉宽调制器(PWM)控制器。早期的PWM控制器是电压控制型的,常用的电压型PWM控制器有TL494、TL495、SG3524、SG3525等。电压型PWM是指控制器按反馈电压来调节输出脉宽,电流型PWM是指控制器按反馈电流来调节输出脉宽。 电流型PWM是在脉宽比较器的输入端,直接用流过输出电感线圈电流的信号与误差放大器输出信号进行比较,从而调节占空比,使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环、电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型PWM控制器。 电流型PWM 电流型PWM正是针对电压PWM型的缺点发展起来的。它在原有的电压环上增加了电流反馈环节,构成电压电流双闭环控制。内环为电流控制环,外环为电压控制环。无论电流的变化,还是电压的变化,都会使PWM 输出脉冲占空比发生变化。这种控制方式可改善系统的电压调整率,提高系统的瞬态响应速度,增加系统的稳定性。其控制系统框图如图2所示。
电流型PWM控制的优点如下: a)电压调整率好。输入电压的变化立即引起电感电流的变化,电感电流的变化立即反映到电流控制回路而被抑制。不像电压控制要经过输出电压反馈到误差放大器,然后再调节的复杂过程,所以响应快。如果输入电压的变化是持续的,电压反馈环也起作用,因而可以达到较高的线形调整率。 b)负载调整率好。由于电压误差放大器可专门用于控制占空比,以适应负载变化造成的输出电压的变化,因而可大大改善负载调整率。 c)系统稳定性好。从控制理论的角度讲,电压控制单闭环系统是一个无条件的二阶稳定系统。而电流控制双闭环系统是一个无条件的一阶稳定系统,系统稳定性好。 电流型PWM控制芯片UC3844的基本原理 UC3844是电流型单端输出式PWM,其最大占空比为50%,启动电压16V ,具有过压保护和欠压锁定功能。当工作电压大于34V时,稳压管稳压,使内部电路在小于34V电压下可靠工作;当输入电压低于10V时,芯片被锁定,控制器停止工作。其内部框图和引脚图如图3所示。
电流型PWM 控制器在电源中的应用
电流型PWM 控制器在电源中的应用 发布日期:2009-3-16 14:51:51文章来源:搜电浏览次数:51 1 双环电流型PWM控制器工作原理 双环电流型脉宽调制( PWM) 控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。双环电流型PWM控制器电路原理如图1 所示。 从图1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A ,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感) 中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。 系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟,Vea上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降, 导致斜坡电压推迟到达Vea ,使PWM 占空比加大,起到调整输出电压的作用。由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。 2 双环电流型PWM控制器的特点 a) 由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环) ,因而使得系统的电压调整率非常好,可达到0.01 %/V ,能够与线性移压器相比。 b) 由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。 c) 由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1 V ,PWM控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。 d) 误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。 e) 由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。
电流型PWM控制器功率因数校正方法。。。
电压型PWM是指控制器按反馈电压来调节输出脉宽,而电流型PWM是指控制器按反馈电流来调节输出脉宽。电流型PWM是在脉宽比较器的输入端,直接用流过输出电感线圈 电流的信号与误差放大器输出信号进行比较,从而调节占空比,使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环、电流环双环系统,因此,无论开关电源的电压 调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型PWM控制器。 1 双环电流型PWM控制器工作原理 双环24V电源电流型脉宽调制(PWM)控制器是在普通电压反馈PWM控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。双环电流型PWM控制器电路原理如图1所示。 从图1可以看出,24V电源电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。https://www.360docs.net/doc/dc1137995.html,/520010/星战风暴 系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟,Vea上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt下降,导致斜坡电压推迟到达Vea,使PWM占空比加大,起到调整输出电压的作用。由于既对电压又对电流起控制作用,所以
控制效果较好在实际中得到广泛应用。 2 双环电流型PWM控制器的特点 a)由于输入电压Vi的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%/V,能够与线性移压器相比。 b)由于24V电源双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。 c)由于Rs上感应出峰值电感电流,只要Rs上电平达到1V,PWM控制器就立即关闭, 形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。 d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。 e)由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压 信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。 3 双环电流型PWM控制器功率因数校正 正是基于以上特点,电流型PWM控制器在实际应用中被越来越广泛地采用。对它采用 功率因数校正技术,可以有效地减少高次谐波对电网的干扰,减小功耗,具有较大的实际意义。 3.1 功率因数校正方法 功率因数校正主要有两种方法:一种是将电网上公用负载端并接一个专用的功率变换器,对无功和谐波进行补偿;另一种是将负载的整流电路与滤波电容之间增加一个功率变换电路,将输入电流校正成与电网电压相近的正弦波。实现功率因数校正在CCM和DCM下
交互式有源箝位电流型PWM控制IC_LM5034
交互式有源箝位PWM控制IC--LM5034. 有源箝位正激式变换器有一系列的优点,然而要想获得更大的功率输出,只靠一只功率MOSFET就有些困难,那么如何利用原系统EMI以及输入电路的工作间隙进一步扩大输出功率呢?搞一个交互式有源箝位正激电路可能是最经济的方法。 一般有源箝位正激电路正常工作的占空比为40~50%,另外50~60%的时间为空档。我们将两个有源箝位正激电路放在一起,同频同步工作,但功率元件的导通信号差1800时将会非常优秀,此外两路工作既可以满足不同的多输出电压的需要,也可以做单输出的并联。 LM5034即是这样一款交互式控制方式有源箝位正激电路的控制IC。 LM5034中有一个100V高压以下的起动电路,然后由一个振荡器去控制两路正激拓扑,每路还都给出有源箝位驱动的重叠调节,两路各自的最大占空比控制。此外还给出欠压锁定,逐个周期式电流限制,打呃式的故障保护,可调整重新起动时间,电流型工作的斜率补偿,软起动及2MHz的最高振荡频率。每路栅驱动输出高达2.5A等,因此可以实现大功率仅次于全桥电路拓朴的功率输出。 内部等效电路如图1所示。 图1 LM5034控制器的内部等效电路
LM5034采用20Pin引脚的包封,下面先介绍各端子的功能。 1Pin OVLP.有源箝位的重迭时间设置。(间隔调整)在其外部接一支电阻到GND(10K~100K)设置此重迭时间,它用于调节功率开关的ZVS状态。 2Pin V1N.高压起动端子,输入电压可从13V~105V。 3Pin Comp1.PWM控制信号给1通道的PWM比较器的反相端子,OUT1的占空比随Comp1电压增加而增大,内部5KΩ电阻外接光耦。 4Pin CS1电流检测输入,1通道的电流取样及电流限制的检测,如果CS1超出0.5V,OUT1即被终止。其通过一外部电阻接出以调节PWM的斜率补偿,不得超过1.25V。 5Pin SS1第一通道的软起动端子,外接一电容设置软起动时间,充电电流为50uA,若故障后重新起动则电流仅为1uA。 6Pin UVLO输入欠压锁定,外部一个电阻分压器从输入到地,然后接于此端,UVLO参考电压为1.25V,内部开关给出25uA电流,可调节UVLO的窗口阈值,此外UVLO端的电压还控制着最大占空比。 7Pin VCC1起动调节器输出,给1通道提供一个7.7V的稳定电压,Vcc1及Vcc2两通道供电总合会超过19mA。 8Pin OUT1.第一通道栅驱动输出,频率为振荡器的1/2,电平为7.7V到GND。 9Pin AC1第一通道箝位MOSFET驱动输出,相位电平适合于P沟MOSFET。若驱动N沟MOSFET则需采用变压器隔离及倒相其与OUT1的交越(间隔)由OVLP端上的电阻调节。 10Pin GND1.第一通道的公共端。 11Pin GND2.第二通道的公共端。 12Pin. AC2.第二通道的箝位MOSFET驱动输出,它与OUT2的交越时间同样由OVLP调节。 13Pin OUT2第二通道主功率MOSFET输出驱动。同样,频率为振荡器的1/2,幅度为7.7V到GND。 14Pin VCC2起动调节器输出给二通道供电。 15Pin RES打呃保护及重新起动时间调节。 16Pin SS2软起动,控制器2通道软起动时间控制。 17Pin CS2 第二通道的电流检测输入。 18Pin COMP2.PWM控制信号给二通道PWM比较器,功能与COMP1相同。 19Pin DCL 最大占空比设置端。用一只外接电阻到地同时给OUT1和OUT2来设置。 20Pin RT/SYNC 振荡器定时电阻,调节振荡器频率,并用于外同步输入。 LM5034控制功能描述 LM5034 IC内包含了实现交互式有源箝位,正激电路控制的全部功能。两个独立通道,一个振荡频率,相差1800的工作相位差,这就大大减小了输入的滤波及纹波电流。每个通道都包含了完整的PWM控制器,电流检测端子,软起
变频器电流跟踪PWM控制
摘要 本设计中采用得最多的是控制技术是脉冲宽度调制(PWM),其基本思想是:控制逆变器中电力电子器件的开通或关断,输出电压为幅值相等、宽度按一定规律变化的脉冲序列,用这样的高频脉冲序列代替期望的输出电压。传统的PWM技术是用正弦波来调制等腰三角波,称为正脉冲宽度调制,随着控制技术的发展,产生了电流跟踪PWM(CFPWM)控制技术。CFPWM的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波。 最后利用利用Matlab/Simulink对整个系统进行仿真,并对仿真结果进行分析。 关键词:异步电机;电流控制;脉宽调制;CFPWM。
目录 摘要.......................................................................................................... Ι1 设计任务和要求 (3) 1.1 设计任务 (3) 1.2 任务要求 (3) 2 总体设计 (4) 2.1 系统组成框图 (4) 2.2 电流滞环跟踪控制原理 (5) 2.3 滞环宽度分析 (6) 2.4 电流滞环跟踪控制的特点 (8) 3 电流的滞环跟踪控制的simulink的仿真 (9) 3.1 仿真软件介绍 (9) 3.2 单相电流跟踪控制逆变器仿真 (9) 3.3 三相电流跟踪滞环控制仿真 (12) 3.4 仿真结果分析 (16) 4.总结 (16) 参考文献 (17)
1 设计任务和要求 1.1 设计任务 设计一通用型变频器的主电路和控制电路组成系统,对异步电机进行变频调速,完成变频器主电路设计,主电路可选用交-直-交结构,进行参数计算和器件选型。完成变频器控制电路设计,对逆变部分控制方式采用电流跟踪控制(CFPWM)。利用Matlab/Simulink对整个系统进行仿真,并对仿真结果进行分析。 1.2 任务要求 (1)主电路选择、参数计算及器件选型。 (2)控制电路选择、参数计算及器件选型。 (3)运用MA TLAB/Simulink软件进行仿真,校验。
电流控制型pwm控制芯片
摘要:介绍并比较了电压控制型和电流控制型DC/DC变换器的基本原理,设计出了基于电流控制型PWM 控制芯片UC3846的大功率DC/DC变换器的实用电路,提出了两种UC3846输出脉冲封锁方式,设计出一种新颖的IGBT驱动电路,实验结果证明,该电路具有较好的控制特性和稳定性。 关键词:DC/DC变换器;脉宽调制;电压控制型;电流控制型;IGBT驱动 0 引言 随着工业、航空、航天、军事等应用领域技术的不断发展,人们对开关稳压电源的要求也越来越高。某系统对大功率开关稳压电源提出的要求是:输入电压为AC220V,输出电压为DC38V,输出电流为100A。开关电源的结构一般为先进行AC/DC然后再DC/DC的形式,考虑到论文篇幅的限制,仅对DC/DC变换部分进行讨论。 大功率DC/DC变换器主电路拓扑有很多种,诸如双管正激式、推挽式、半桥式和全桥式等。控制芯片的种类也非常多,主要分为电流控制型与电压控制型两大类。电压控制型只对输出电压采样,作为反馈信号进行闭环控制,采用PWM技术调节输出电压,从控制理论的角度看,这是一种单环控制系统。电流控制型是在电压控制型的基础上,增加一个电流负反馈环节,使其成为双环控制系统,从而提高了电源的性能。 根据对各种拓扑和控制方式的技术成熟程度,工程化实现难度,电气性能以及成本等指标的比较,本文选用半桥式DC/DC变换器作为主电路,电流型PWM控制芯片UC3846作为该系统的控制单元。 1 电压控制型脉宽调制器和电流控制型脉宽调制器 图1为电压控制型变换器的原理框图。电源输出电压的采样反馈值V f与参考电压V r进行比较放大,得到误差信号V e,它与锯齿波信号比较后,PWM比较器输出PWM控制信号,经驱动电路驱动开关管通断,产生高频方波电压,由高频变压器传输至副方,经整流滤波得到所需要的电压。改变电压给定V r,即可改变输出电压V o。 图1 电压控制型的原理图 图2为电流控制型变换器的原理框图。恒频时钟脉冲置位R-S锁存器,输出高电平,开关管导通,变压器原边的电流线性增大,当电流在采样电阻R s上的压降V s达到V e时,PWM比较器翻转,输出高电平,
电流滞环控制
摘要 脉冲宽度调制(PWM),其基本思想是:控制逆变器中电力电子器件的开通或关断,输出电压为幅值相等、宽度按一定规律变化的脉冲序列,用这样的高频脉冲序列代替期望的输出电压。传统的PWM技术是用正弦波来调制等腰三角波,称为正脉冲宽度调制,随着控制技术的发展,产生了电流跟踪PWM(CHBPWM)控制技术。CHBPWM的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波。 关键词:电流控制;脉宽调制; CHBPWM;
1.前言 SPWM控制技术以输入电压接近正弦波为目的,电流波形则因负载的性质及大小而异。然而对于交流电机来说,应该保证为正弦波的是电流,稳态时在绕组中通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不产生脉动,因此以正弦波电流为控制目标更为合适。电流跟踪PWM(Current Follow PWM, CHBPWM)的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波形,这就能比电压控制的SPWM获得更好的性能。 电流跟踪控制的精度与滞环的宽度有关,同时还受到功率开关器件允许开关频率的制约。在实际使用中,应在器件开关频率允许的前提下,尽可能选择小的宽度。电流滞环跟踪控制方法的精度高、响应快,且易于实现,但功率开关器件的开关频率不定。为了克服这个缺点,可以采用具有恒定开关频率到的电流控制器,或者局部范围内限制开关频率,但这样对电流波形都会产生影响。 2.原理 2.1.电流滞环跟踪控制原理 现在以A相电流滞环跟踪控制为例,其控制结构图如下图 2-1 所示: 图1-1 电流跟踪控制A相原理图 其中电流控制器是带滞环的比较器,环宽为h,将给定电流ia与输出电流i*a进行比较,电流偏差△ia 超过±0.5h 时,经滞环控制器(HBC)控制逆变器 A 相上、下桥臂的功率开关器件动作。 设比较器的滞环宽度为h,当输出电流i*a比给定电流ia大时,且误差大于0.5h时,滞环比较器输出负电平,驱动开关器件VT1关断,VT2导通,使实际电流减小。当减小到与给定电流相等时,滞环比较器仍保持负电平输出,VT1保持关断,实际电流继续减小,直到误差大于0.5h时,滞环控制器翻转,输出正电平信号,开关器件VT1导通,VT2关断,使实际电流增大,一直增大到带宽的上限。以上过程重复进行,这样交替工作,实际电流与给定电流的偏差保持在-0.5h-+0.5h 之间,并在给定电流上下作锯齿状变化,达到跟踪电流的目的。 2.2.滞环宽度分析 采用电流滞环跟踪控制的PWM波形,如下图 2-2所示:
电流滞环跟踪PWM(CHBPWM)控制技术MATLAB仿真
交流调速系统仿真实验报告——电流滞环跟踪PWM控制技术专业:电气工程及其自动化 班级:11电牵4班 姓名:江流 在班编号:26 指导老师:章勇高 实验日期:2014年10月4日
一、实验名称: 电流滞环跟踪PWM(CHBPWM)控制技术。 二、目的及要求 了解并掌握电流滞环跟踪PWM(CHBPWM)控制电路的工作原理; 2.掌握MATLAB中对Simulink的使用及构建模块; 3.熟悉掌握用MA TLAB绘图的技巧。 三、实验原理 1电流滞环跟踪PWM(CHBPWM)控制电路的原理,如图一所示: 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流 i*a 与输出电流 ia 进行比较,电流偏差超过时,经滞环控制器HBC控制逆变器 A相上(或下)桥臂的功率器件动作。B、C 二相的原理图均与此相同。 如果, ia < i*a ,且i*a - ia ≥ h,滞环控制器 HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大 直到达到ia = i*a + h , = –h ,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使 HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在
正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
单相电压型PWM整流器波形分析
单相电压型PWM整流器波形分析对于单相VSR而言,其交流侧基波电压控制有两种PWM的调制方式,即双极性调制和单极性调制。以下将根据双极性PWM的调制方式,分析单相电压型PWM整流器(如图1所示)。 图1 单相电压型PWM整流器 基于matlab的波形分析及仿真结果 将图1的单相电压型PWM整流器在matlab中建立仿真模型如下图所示:
图2 单相电压型PWM整流电路仿真模型 系统仿真参数如下:交流侧电网电压220V,工频直流侧电 阻R L=10Ω。主电路储能元件参数为L=3 Mh,C=143μF。PI参数Ki=2.3,τi=128。 图3 控制信号的时序分布 (1)交流侧电压v(t) 若单相VSR直流侧电容足够大,则在PWM过程中可近似认为其直流侧电压为一定值,即v dc(t)=V dc。这样当采用双极性调制时,单相VSR交流侧电压v(t)波形为幅值在V dc、-V dc间切换的PWM波形。第k周期中v(t)波形如图4所示。
图4 交流测电压波形 (2)电感端电压v L(t) 单相vsr网侧电感端电压v L(t)等于电网电动势e(t)与其交流侧电压v(t)之差,即 v L(t)=e(t)-v(t)。若令e(t)=E m sinωt,且当开关频率远高于电网基波频率时,第k个开关周期中e(t)可近似为一常值,即 e(t) ≈ e(kT s)=E m sinωkTs。其中,kT s ≤ t ≤ (k+1)T s。如图5所示。 图5 电感电压波形 (3)网侧电流i(t) 若忽略单相VSR网侧电阻,则网侧电流i(t)为:i(t)=1/L∫v L(t)d t=1/L∫[e(t)-v(t)]d t 得第k个开关周期网侧电流表达式为:i(t′)=1/L(E m sinωkTs-V dc)t′+i(t′=0) (0≤t′