Copley驱动器用户指南
枯藤老树昏鸦,小桥流水人家,古道西风瘦马。夕阳西下,断肠人在天涯。
Copley驱动器总结
一、驱动器简介
极性输入。
另外还需要一个独立的+24V电源给内部控制电路供电,这个电源跟主电源隔离开来。这个设计保证了主电源断开,+24v电源不断开的时候,驱动器能保留位置信息和通信。
CME2
CME2是对驱动器进行配置和调试的软件,通过RS232串口连接电脑和驱动器。所有的配置驱动器的操作都可以通过这个软件完成。电机数据存储为.CCM文件,驱动器数据存储为.CCX
文件。
二、驱动器操作
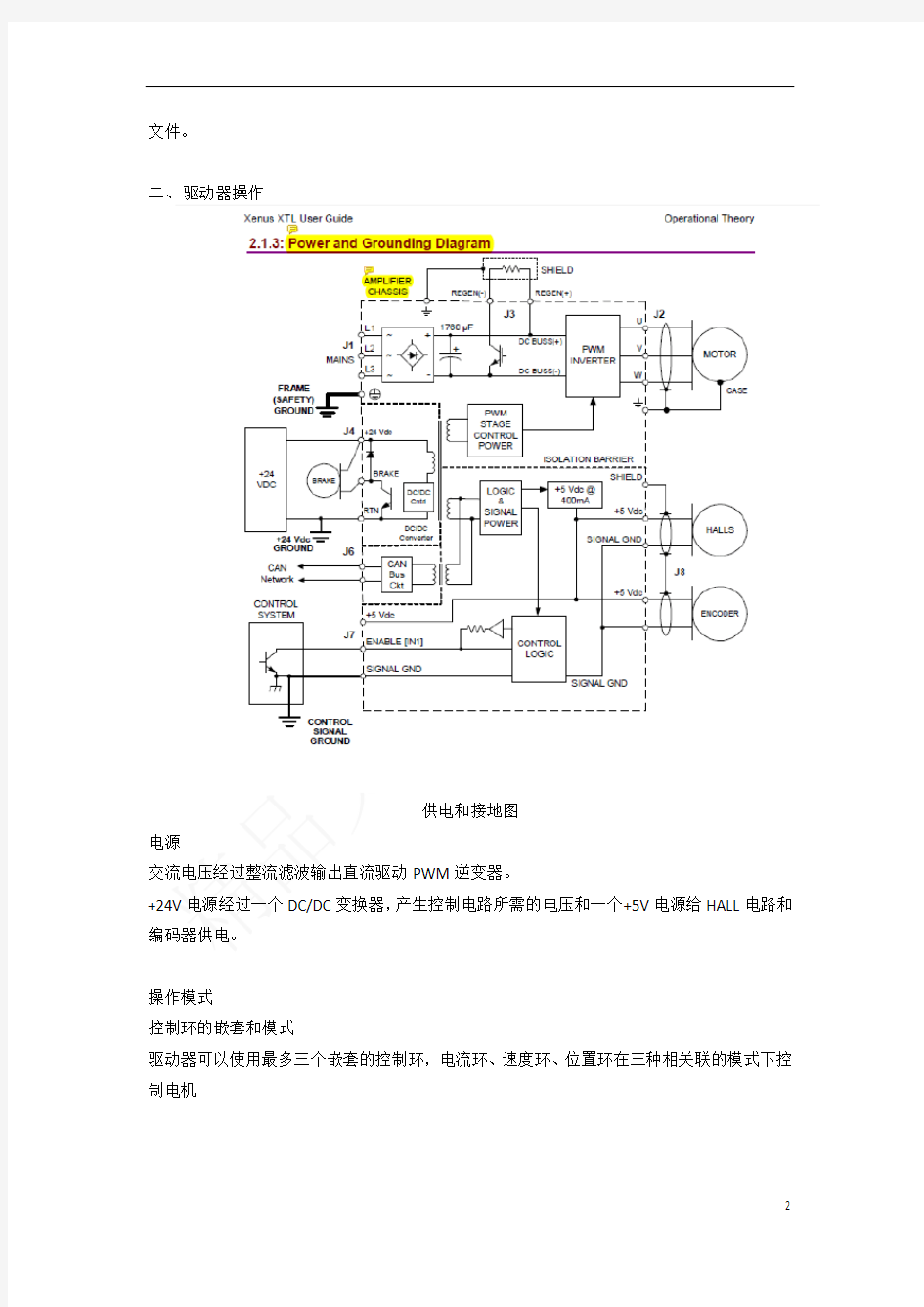
供电和接地图
电源
交流电压经过整流滤波输出直流驱动PWM逆变器。
+24V电源经过一个DC/DC变换器,产生控制电路所需的电压和一个+5V电源给HALL电路和编码器供电。
操作模式
控制环的嵌套和模式
驱动器可以使用最多三个嵌套的控制环,电流环、速度环、位置环在三种相关联的模式下控制电机
控制环图解
在位置模式下,驱动器用到了三个环。如上图所示,位置环驱动速度环,速度环驱动电流环。在速度模式下,速度环驱动电流环,在电流模式下,电流环直接由外部或内部的电流指令驱动。
环路基本属性
这些环路和一般的伺服控制环路有一些相同的属性
环路属性描述
命令输入每个环路给定一个需要达到的值。例如,速度环接受一个速度指令,它是期望的电动机速度
限制每个环路上都有限制,以保护电机或者机械系统
反馈伺服控制环接受反馈。如位置环把电机的实际位置作为反馈。
增益这些是伺服环路的数学方程中的常数值,通过这些值可以设置驱动器,提高驱动器的性能。调整这些值被称为环路整定。
输出环路产生的控制信号。这个信号可以被用作命令信号输入到另一控制回路或输入到功率放大器中。
电流模式和电流环
电流环的前端是一个限制模块,限制模块接收一个电流指令,然后输出一个受到限制的电流,这个电流减去实际的电流,得到一个偏差信号,经过P,I调节得到一个指令,这个指令然后施加到驱动器的功率级。
电流环的输入
1.驱动器的模拟输入或者PWM输入
2.CANopen, DeviceNet, or RS-232 Serial输入
3.Copley虚拟运动控制程序
4.驱动器内部的函数发生器
偏移
在速度或者位置模式下,电流指令是由速度环产生的。
在某些应用中,会有一个持续的力作用于电机,最典型的是一个竖直的轴,受到一个恒定的重力作用,这个时候需要在电流指令中加一个偏移量。
限制
电流指令受到以下参数限制(可由用户设置)
限制描述
峰值电流限制驱动器在短时间内能产生的最大电流,这个值不能超过驱动器的额定峰值电流值(即40A)
持续电流限制驱动器能产生的最大的持续电流
I2T时间限制电机以最大电流运行的最大时间,超过此值必须减小电流到持续电流值,否则会产生错误
Ramp电流指令的变化率
电流环输出
电流环的输出是一个指令,改变驱动器PWM输出级的占空比。
自动整定
CME2提供一个电流环的自动整定功能,能够自动调整P和I的值。
速度模式和速度环
速度环路图
速度环的限制模块接收一个速度指令,经过输入滤波器,输出一个经过限制的速度指令,这个指令减去实际的速度,得到偏差信号,经过P,I调节,在经过一个数字滤波器,得到一个电流指令,输入到电流环当中。
输入
速度模式下,速度指令输入可以是:
1.驱动器的模拟输入或者PWM输入
2.CANopen, DeviceNet, or RS-232 Serial.
3.Copley虚拟运动控制程序
4.驱动器内部函数发生器
在位置模式下,速度指令是由位置环产生的。
速度环限制
限制描述
速度限制设置输入到速度环的最大速度指令值
加速度限制设置最大加速度
减速度限制设置最大减速度
Fast Stop Ramp 当硬件禁用的时候指定速度环的减速度(软件禁用的时候,这个参数不使用)如果设置了制动延时,那么电机在制动之前按照这个减速度减速。这
新力川伺服驱动使用说明
感谢您使用本产品,本使用操作手册提供LCDA系列伺服驱动器的相关信息。内容包括: ●伺服驱动器和伺服电机的安装与检查 ●伺服驱动器的组成说明 ●试运行操作的步骤 ●伺服驱动器的控制功能介绍与调整方法 ●所有参数说明 ●通讯协议说明 ●检测与保养 ●异常排除 ●应用例解说 本使用操作手册适合下列使用者参考: ●伺服系统设计者 ●安装或配线人员 ●试运行调机人员 ●维护或检查人员 在使用前,请您仔细详读本手册以确保使用上的正确。此外,请将它妥善保存在安全的地点以便随时查阅。下列在您尚未读完本手册时,务必遵守事项: ●安装的环境必须没有水气,腐蚀性气体或可燃性气体。 ●接线时,禁止将三相电源接至马达U、V、W的连接器,因为一旦接错 时将损坏伺服驱动器。 ●接地工程必须确实实施。 ●在通电时,请勿拆解驱动器、马达或更改配线。 ●在通电动作前,请确定紧急停机装置是否随时开启。 ●在通电动作时,请勿接触散热片,以免烫伤。 如果您在使用上仍有问题,请洽询经销商或者本公司客服中心。
安全注意事项 LCDA 系列为一开放型(Open Type )伺服驱动器,操作时须安装于遮蔽式的控制箱内。本驱动器利用精密的回授控制与结合高速运算能力的数字信号处理器(Digital Signal Processor,DSP ),控制IGBT 产生精确的电流输出,用来驱动三相永磁式同步交流伺服马达(PMSM )达到精准定位。 LCDA 系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱动器、线材与电机都必须安装于符合环境等级的安装环境最低要求规格)。 在按收检验、安装、配线、操作、维护与检查时,应随时注意以下安全注意事项。 标志[危险]、[警告]与[禁止]代表的含义: ? 意指可能潜藏危险,若未遵守要求可能会对人员造成严 重伤或致命 ? 意指可能潜藏危险,若未遵守可能会对人员造成中度的 伤害,或导致产品严重损坏,甚至故障 ? 意指绝对禁止的行动,若未遵守可能会导致产品损坏, 或甚至故障而无法使用
XPL-ds_ Xenus Copley交流伺服驱动器
description Xenus Plus set new levels of performance, connectivity, and flexibility. CANopen communication provides a widely used cost-effective industrial bus. A wide range of absolute interfaces are built-in including EnDat, Hiperface, and BiSS. High resolution A/D converters ensure optimal current loop performance. Both isolated and high-speed non-isolated I/O are provided. For safety critical applications, redundant power stage enable inputs can be employed. Model Vac Ic Ip XPL-230-18100 - 240618XPL-230-36100 - 2401236XPL-230-40 100 - 240 20 40 Add -R for resolver feedback option control Modes ? Indexer, Point-to-Point, PVT ? Camming, Gearing ? Position, Velocity, Torque command interface ? CANopen ? ASCII and discrete I/O ? stepper commands ? ±10V position/velocity/torque (2 inputs) ? PWM velocity/torque command ? Master encoder (Gearing/Camming) Communications ? CAN ? RS-232 ? RS-485 (Optional)Accessories ? External regen resistors ? External edge filter Feedback ? Digital quad A/B encoder ? EnDat, Hiperface, BiSS, SSI, & panasonic encoders ? Aux. encoder / encoder out ? Analog sin/cos encoder ? Resolver option ? Digital Halls Safe Torque Off (STO) ? Two active inputs enable power stage ? One output confirms power stage status I/O Digital ? 15 inputs, 6 outputs I/O Analog ? 2, 16 bit inputs ? 1, 12 bit input ? 1, 12 bit output Dimensions: in [mm] ? 7.9 x 5.5 x 2.3 [202 x 139 x 52]
富士伺服驱动器参数设定及基本操作技巧
4.2.1 第一阶段 连接伺服放大器及伺服电机,进行试运行。配线方法参照3 章。 在伺服电机的输出轴未连接到机械系统的状态下进行试运行。 在第一阶段确认以下项目。 <确认> ?确认伺服放大器的电源配线 (L1、L2、L3) ?确认伺服电机动力线 (U、V、W)、编码器电缆线 ?确认伺服放大器、伺服电机是否正常工作 ?确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序 (1) 请固定伺服电机,以防其横向翻倒。 将伺服电机牢固固定 不要在电机的输出轴上安装任何东西 (2) 请按3 章的配线,为伺服放大器与伺服电机配线。 ※第一阶段进行单体试运行,故不要连接到CN1 上。 (3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。 i) 请确认充电用显示灯。 ii) 请确认触摸面板显示。 ※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。 5 参数 5.1 参数构成 伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。 由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。 作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。) 5.1.1 利用触摸面板编集的方法 5-2
5.2 参数一览表
5.3 参数说明 以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。 输出脉冲数和命令脉冲补偿无关。根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。 ※只在位置控制时有效。 可以选择输入脉冲串端子的信号形式。 可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。 最大输入频率在差动输入时为1.0 [MHz],在集电极开路输入时为200 [kHz]。 但是,请输入各种信号,以满足以下条件。 (信号CA、*CA、CB、*CB 各自条件相同) ■命令脉冲/命令符号(参数03 的设定值:0) 用命令脉冲表示旋转量,用命令符号表示旋转方向。 ?差动输入
之山伺服器说明书(ZS-C或ZS-Q)
目录 安全事项 (1) 第一章产品检查与型号说明 (3) 第二章安装 (4) 第三章信号和接线 (8) 第四章参数说明 (15) 第五章面板显示及操作 (25) 第六章运行 (28)
安全事项 欢迎您使用杭州之山科技有限公司生产的纺机专用伺服控制系统。 在产品存放、安装、配线、运行、检查或维修前,用户必需熟悉并遵守以下重要事项,以确保安全地使用本产品。 错误操作可能会引起危险并导致人身伤亡。 错误操作可能会引起危险,导致人身伤害,并可能使设备损坏。 严格禁止行为,否则会导致设备损坏或不能使用。 禁止将产品暴露在有水气、腐蚀性气体、可燃性气体的场合使用。否则会导致请将接地端子可靠接地,接地不良可能会造成触电或火灾。
当机械设备开始运转前,必须配合合适的参数设定值。若未调整到 当电机运转时,禁止接触任何旋转中的零件,否则会造成人员伤亡。 设备运行时,禁止触摸驱动器和电机,否则会造成触电或烫伤。 禁止接触驱动器及其电机内部,否则会造成触电。 电源启动时,禁止拆卸驱动器面板,否则会造成触电。 本手册所涉及产品为一般工业用途,请勿用于可能直接危害人身安全装置上,
第一章产品检查与型号说明 1.1 产品检查 为了防止本产品在购买与运输过程中的疏忽,请详细检查以下列出的项目: a. 是否是所欲购买的产品:分别检查电机与驱动器上的产品型号。 b. 电机轴是否运转平顺:用手分别逆时针和顺时针旋转电机转轴,如果可以平顺运转,代表电机转轴是正常的。 c. 外观是否有损伤:目视检查是否有外观上的任何损坏,是否有松脱的螺丝。 d. 检查是否有任何组件的缺失。 完整的伺服组件包括: 伺服驱动器及伺服电机 5PIN 电源进线接线端子(L、N、R、S、T) 3PIN UVW电机动力线接线端子(U、V、W) 3PIN 刹车电阻连接线(P、D、C) DB25 控制端子接线端子(公头) DB15 电机编码器接线端子(公头) 如果有任何以上的情形发生,请与我们联系以获得妥善解决。 1.2产品型号对照 1.2.1 伺服驱动器 1.2.2 伺服电机
DA98伺服驱动器说明书
第一章概述 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP)、大规模可编程门阵列(CPLD)和MISUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好、彩最何必PID算法完成PWM控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ●避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ●宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ●高速度、高精度 伺服电机最高转速可达3000rpm,回转定位 精度1/10000r。 〖注〗不同型号伺服电机最高转速不同。 ●控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。
1.2 到货检查 1)收货后,必须进行以下检查: (1) 包装箱是否完好,货物是否因运输受损? (2) 核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3) 核对装箱单,附件是否齐全? 2)型号意义: (1) 伺服驱动器型号 (示出华中理工大学电机厂STZ 系列) ※1 (04、06……23)对应0.4~2.3KW ※2 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺省参数仅适配STZ 系列伺服电机, 选配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于1.5KW )为标准配置,中功率(大于1.5KW 、小于等于2.3KW )采用 加厚散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000rpm ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机 电机外径 110:110×110mm 130:130×130mm
Copley驱动器用户指南
Copley驱动器总结 一、驱动器简介 -S和-R版本可以从模拟正弦/余弦编码器和无刷解析器中模拟出正交编码器的输出信号,我们的驱动器是XTL-230-40,输入标准版本,支持正交编码器。 驱动器可以以以下几种方式进行操作: 1.作为一个传统的电机驱动器,接受外部控制器发出的电流,速度和位置信号。 在电流和速度模式下,可以接受正负10V的模拟信号;占空比50%的PWM波,或者PWM/极性输入。 在位置模式下,输入可以是从步进电机控制器发出的位置增量命令(以脉冲方向格式或者递增递减计数格式)或者是从主编码器输出的A/B正交指令。 2.作为CANopen网络的一个网点。 3.作为DeviceNET网络的一个网点。 4.作为一个独立的控制器运行虚拟机上的程序,或者通过RS232串口运行ASCII码格式的 指令。 另外还需要一个独立的+24V电源给内部控制电路供电,这个电源跟主电源隔离开来。这个设计保证了主电源断开,+24v电源不断开的时候,驱动器能保留位置信息和通信。 CME2 CME2是对驱动器进行配置和调试的软件,通过RS232串口连接电脑和驱动器。所有的配置驱动器的操作都可以通过这个软件完成。电机数据存储为.CCM文件,驱动器数据存储为.CCX 文件。
二、驱动器操作 供电和接地图 电源 交流电压经过整流滤波输出直流驱动PWM逆变器。 +24V电源经过一个DC/DC变换器,产生控制电路所需的电压和一个+5V电源给HALL电路和编码器供电。 操作模式 控制环的嵌套和模式 驱动器可以使用最多三个嵌套的控制环,电流环、速度环、位置环在三种相关联的模式下控制电机
SD伺服驱动器说明书
S D伺服驱动器说明书 Revised by Jack on December 14,2020
第一章简介 1.1产品简介 交流伺服技术自八十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷包装机械、纺织机械、自动化生产线等自动化领域。 SDXXX系列交流伺服是本公司自主研发的新一代交流伺服驱动器,主要采用最新的IRMCK201作为核心运算单元,并采用了复杂可编程器件EPLD及三菱智能功率模块,具有集成度高,体积小,响应速度快,保护完善,可靠性高等一系列优点。适用于高精度的数控机床、自动化生产线、机械制造业等工业控制自动化领域。 与以往驱动系统相比,SDXXX交流伺服系统具有以下优点: ★伺服电机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。 ★调速比为1:5000,从低速到高速都具有稳定的转矩特性。 ★伺服电机最高转速可达5000rpm,回转定位精度1/10000r(注:不同型号电机最高转速不同)。 ★通过修改参数可对伺服系统的工作方式、运行特性作出适当的设置,以适应不同的要求。 ★改进的空间矢量控制算法,比普通的SPWM产生的力矩更大,噪音更小。 ★高达3 倍的过载能力,带负载能力强。 ★完善的保护功能:过流,过压,欠压和编码器故障等保护。 ★监视功能允许显示18个参数状态,包括位置误差,电机转速、反馈脉冲、指令脉冲、电机电流、报警记录等。
★高适应性,能够适应高速高精度电机,可以配套2~8磁极,400-6000线编码器的各型号电机。 1.2型号意义 1.伺服驱动器型号 S D30 MT 功能代码(M:数字量与模拟量兼容) IPM模块的额定电流(15/20/30/50/75A) 采用空间矢量调制方式(SVPWM)的交流伺服驱动器 第二章安装 【注意】 ☆产品的储存和安装必须满足环境条件要求。 ☆产品的安装需要防火材料,不得安装在易燃物上面或附近,防止火灾。 ☆伺服驱动器须安装在电气控制柜内,防止尘埃、腐蚀性气体、导电物体、液体及易燃物侵入。 ☆伺服驱动器和伺服电机应避免振动,禁止承受冲击。 ☆严禁拖拽伺服电机电线、电机轴和编码器。 2.1安装场合 ◎电气控制柜内的安装 驱动器的使用寿命与环境温度有很大的关系。电气控制柜内部电气设备的发热以及控制柜内的散热条件,都会影响伺服驱动器周围的温度,所以在考虑机箱设计时,应考虑驱动器的散热冷却以及控制柜内的配置情况,以保证伺服驱动器周围环境温度在55℃以下,相对湿度95%以下。长期安全工作温度在45℃以下。
Copley 驱动中文调试说明
Copley CME2调试软件用户向导 Chinese Revision 1 Nov 2009 Written by Paul
目录 1.软件的安装、启动及向导 (4) 1. 1 安装软件 (4) 1. 2 启动CME2软件 (4) 1. 3 串口设置 (4) 1. 4 CAN网络参数配置 (6) 1. 5 CME2连接到驱动器 (6) 1. 6 CME2软件向导 (7) 2.基本配置 (9) 2.1 改变基本设置 (9) 2.2 ServoTube电机配置 (12) 3.电机/反馈参数配置 (14) 3.1 电机/反馈参数窗口概览 (14) 3.2 旋转电机参数设置 (14) 3.3 直线电机参数设置 (15) 3.4 反馈参数,旋转电机 (16) 3.5 反馈参数,直线电机 (17) 3.6 反馈注意事项 (17) 3.7 Brake/Stop 参数 (18) 3.8 Brake/Stop 注意事项 (18) 3.9 计算功能 (19) 4.数字输入/输出配置 (21) 4.1 数字输入 (21) 4.2 数字输出 (23) 4.3 同步PWM开关频率 (28) 5.电机相位 (29) 5.1 用Auto Phase 整定电机相位 (29) 5.2 选择Auto Phase时Current和Increment Rate值向导 (34) 5.3 Auto Phase过程中的微调 (34) 5.4 用Motor Phase Manually整定电机相位 (35) 6.控制面板 (40) 6.1 Control Panel 概览 (40) 6.2 状态指示和消息 (41) 6.3 Control Panel 监控通道 (41) 6.4 控制功能 (42) 6.5 Jog 模式 (42) 7.控制环路 (44) 7.1 电流环设置和调试 (44) 7.2 电流环自动调节 (46) 7.3 电流模式和电流环的注意事项 (48) 7.4 速度环设置和调试 (50) 7.5 速度模式和速度环的注意事项 (52) 7.6 位置环设置和调试 (54)
天虹伺服驱动器说明书.
永磁同步电机驱动器用户手册 THSR-A/B系列
永磁同步电机驱动器用户手册 -I-目录 一.安装 (1) 1.装时注意事项 (1) 2.环境条件 (1) 二.产品型号对照 (2) 1.伺服驱动器铭牌说明 (2) 2.驱动器型号说明 (2) 三.驱动器外观及面板说明 (3) 四.伺服驱动器尺寸图 (6) 五.伺服电机尺寸图 (8) 六.伺服驱动器与伺服电机搭配对照表 (10) 七.驱动器使用电线规格 (11) 八.控制信号标准接线图 (12) 九.驱动器端子说明 (14) 十.伺服驱动器信号输入输出回路图 (17) 十一.驱动器接线方式 (18) 1.绣花机主轴 (19) 2.绣花机移框 (20) 3.绣花机D轴 (21) 4.绣花机H轴 (22) 十二.参数表 (23) 十三.驱动器异常报警 (24) 附录:主轴/移框参数快速设置 (26) 主轴参数快速设置 (26) 移框参数快速设置 (26)
永磁同步电机驱动器用户手册一. 安装 1.装时注意事项 1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有 30cm的间距,这样可以减小电源对信号线的干扰; 2)接线时,禁止将三相电源接至U、V、W端子上; 3)确保接地良好; 4)电机轴心必须与设备轴心对心良好; 5)通电时,请勿拆卸驱动器、电机、或更改配线; 6)通电运行时,请勿接触散热片,以免烫伤 2.环境条件 本产品驱动器使用环境温度为0°C ~ 50°C。若环境温度超过45°C 以上时,请置于条件通风良好的场所。长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。而且也要注意机器的震动是否会影响配电箱的电子装置。除此之外,使用的条件也包括: ▲无发高热装置的场所; ▲无水滴、蒸气、灰尘及油性灰尘的场所; ▲无腐蚀、易燃性的气、液体的场所; ▲无漂浮性的尘埃及金属微粒的场所; ▲坚固无振动的场所; ▲无电磁噪声干扰的场所。 第1页
交流伺服电机驱动器使用说明书.
交流伺服电机驱动器使用说明书 1 ?特点 16位CPU+32位DSP三环(位置、速度、电流)全数字化控制脉冲序列、速度、转矩 多种指令及其组合控制 转速、转矩实时动态显示 完善的自诊断保护功能,免维护型产品交流同步全封闭伺服电机适应各种恶劣环境体 积小、重量轻 2 ?指标 输入电源三相200V -10%?+15% 50/60HZ 控制方法IGBT PWM(正弦波) 反馈增量式编码器(2500P/r ) 控制输入伺服-ON报警清除CW、CCW驱动、静止 指令输入输入电压土10V 控制电源DC12?24V 最大200mA 保护功能OU LU OS OL OH REG OC ST CPU 错误,DSP错误,系统错误 通讯RS232C 频率特性200Hz或更高(Jm=Jc时)体积L250 X W85 X H205 重量3.8Kg 3?原理 见米纳斯驱动器方框图(图1)和控制方框图(图2) 4?接线 4.1主回路 卸下盖板坚固螺丝;取下端子盖板。用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。螺丝拧紧力矩大于 1.2Nm M4或 2.0 Nm M5时才可能损坏端子,接地线径为2.0mn i 具体见接线图3 4.2CN SIG 连接器[ 具体见接线图4 驱动器和电机之间的电缆长度最大20M 这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽; 或让它们捆扎在一起 线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力 屏蔽驱动器侧的屏蔽应连接到CN.SIG连接器的20脚,电机侧应连接到J 脚 若电缆长于10M,则编码器电源线+5V、0V应接双线 4.3CN I/F 连接 控制器等周边设备与驱动器之间距离最大为3M 这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽 或和它们捆扎在一起 COM和COM之间的控制电源(V DC)由用户供给 控制信号输出端子可以接受最大24V或50mA不要施加超过此限位的电压 和电流 若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电 器。不接二极管或接错了二极管的极性,都将可能损坏驱动器 机身接地点(FG)要接到驱动器的一个接地端子具体见接线图5 5.参数
基于Canopen协议的运动控制系统设计
基于Canopen协议的运动控制系统设计 刘玉倩张文靳卫国王慧 (中国电子科技集团公司第四十五研究所,北京,101601) 摘要:描述了一种最广泛应用的现场总线CAN和最为成功的CAN应用层协议Canopen,介绍了CAN +Canopen工业控制总线解决方案,重点阐述了这种解决方案在一种工业控制模型中的实现。同时对软件设计、设备调试中的问题提出解决方案,对系统效率、可靠性进行测试优化。 关键词:CAN;Canopen;运动控制;软件编程 中文分类号:文献标志码:文章编号: Motion Control System Design Based on Canopen protocol Liu Yuqian, Fu Chunhe, Zhang Wen, Jin Weiguo (The 45th Research Institute of CETC,Beijing 101601,Chia) Abstract:This paper describes a widely used fieldbus CAN and the successful Application layer protocol Canopen ,introduces the CAN and Canopen industry control fieldbus solutions, emphatically expounds the realization of the field bus resolution in the industry control model. At the same time, put forward resolvents of problems in software design and machine debugging, tests and optimizes the system’s stability and efficiency. KeyWord: CAN;Canopen;motion control;software program CAN总线系统解决方案是利用CAN总线的优点及其特长为机器自动化设备提供高效、可靠、性价比高的解决方案。CAN+Canopen是机器自动化领域最为成功的总线解决方案,在欧美被广泛应用]1[。本文将以一种全自动半导体设备为具体实例,介绍一种基于CAN+Canopen解决方案的工业控制模型的软件实现。1CAN和Canopen协议 CAN是最早的,也是应用最为广泛的现场总线。CANopen是欧洲CIA组织定义的最为成功的CAN应用层协议,在基于CAN的自动化系统中居于领导地位。CAN现场总线技术是集自动控制技术、通讯技术、传感技术、计算机技术等于一体,是个革命性的技术,正广泛应用于自动化各个领域。目前广泛使用的其它现场总线还有Profibus、DeviceNet、ControlNet、HART、FF等等,但是CAN 总线也是所有现场纵向中最早出现的,也是最适合机器自动化领域的现场总线。 CAN总线除了具有一般总线所具有的优点外,还根据机械自动化的特点,提供了一些非常有优势的技术特点: 1. 高速的数据传输速率可达1M bit/s; 2. 采用对数据通信数据块进行编码,可以多主方式工作;
伺服驱动器使用说明书
MMT- 直流伺服驱动器使用手册济南科亚电子科技有限公司
直流伺服驱动器使用说明书 一、概述: 该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。 二、产品特征: ◇PWM控制H桥驱动 ◇四象限工作模式 ◇全隔离方式设计 ◇线形度好、控制精度高 ◇零点漂移极小 ◇转速闭环反馈电压等级可选 ◇标准信号接口输入0--±10V ◇开关量换向功能 ◇零信号时马达锁定功能 ◇上/下限位保护功能 ◇使能控制功能 ◇上/下限速度设定 ◇输出电流设定功能 ◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能
三、主要技术参数 ◇控制电源电压AC: 110系列:AC :110V±10% 220系列:AC :220V±10% ◇主电源电压AC: 110系列:AC 40----110V 220系列:AC50---- 220V ◇输出电压DC: 110系列:0—130V或其它电压可设定 220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A) DC 10A(最大输出电流15A) DC 20A(最大输出电流25A)◇控制精度:0.1% ◇输入给定信号:0—±10V ◇测速反馈电压: 7V/1000R 9.5V/1000R 13.5V/1000R 20V/1000R 可经由PC板内插片选定并可接受其它规格订制四、安装环境要求: ◇环境温度:-5oC ~ +50oC ◇环境湿度:相对湿度≤80RH。(无结露) ◇避免有腐蚀气体及可燃性气体环境下使用
关于仿人机器人关节驱动微型伺服系统的介绍
摘要:用于仿人机器人关节驱动的微型伺服系统日前完全依赖进口。基于分析微型伺服系统各部件的发展现状与技术特点,研制了一款适用于仿人机器人关节驱动的国产倒服系统,包括永磁无刷伺服电机、巨磁阻编码器、高功率密度驱动模块以及通讯单元。通过与周内仿人机器人研究单位常用的几款进口伺服系统进行对比,验证所研制的微型伺服系统满足仿人机器人关节驱动对功率密度比等性能指标的要求.可完全代替进口产品。 关键词:仿人机器人;关节驱动;微型伺服系统,永磁同步电动机 1 引言 2000年,日本本田公司发布的仿人机器人AsIMO吸引了全世界的目光。过去10年里,得益于计算机、电气工程、材料工程、传感器科学等相关学科的发展,仿人机器人技术也有了长足的发展。其中较为突出的有日本本田公司、美国麻省理工大学、俄亥俄州立大学、北京理工大学、哈尔滨工业大学等。仿人机器人由控制系统、关节伺服系统、传感器系统、能源系统和本体结构5部分组成。关节伺服系统按驱动方式可以分为液压伺服、气动伺服、电机伺服、压电伺服等。这几种系统中,液压伺服抗污染能力差、调试维护困难、瞬间过载能力低;气动伺服非线性程度高、定位刚度小;电机伺服通常需要减速机构,使其体积增大;压电伺服一般不需要减速机构,易于实现微型化,但其驱动电路复杂,多用于微型机器人或仿人机器人的手指关节。比较几种伺服系统的优缺点,电机伺服系统,尤其是旋转电机伺服系统由于技术成熟、可靠性高、刚度强、较易驱动,是目前仿人机器人关节伺服系统的首选。 在仿人机器人中,由于使用电池供电,供电电压低、功率/能量密度受限,且机器人的体积、重量均有严格的要求,所以仿人机器人关节中使用的电机伺服系统有其特殊的要求。例如低工作电压而且变化范围大、低损耗、高功率密度、重景轻、单一电源供电、高动态性能、高可靠性等等。本文围绕仿人机器人对关节驱动的要求特点,详细介绍目前广泛应用的关节电机伺服系统的组成、类别、性能特点等。在此基础上研制了一台国产微型伺服系统,通过与国外同类伺服系统的对比研究,结果表明所研制的微型系统满足仿人机器人关节驱动的性能要求,可取代进口产品。 2 关节驱动伺服系统的组成 电机伺服系统一般是由电动机、位置传感器、电流传感器、功率器件和控制器5部分组成的闭环系统,如图1所示。 2.1电机 永磁无刷电动机无需励磁绕组和励磁电源,结构相对简单,具有很高的功率密度,非常适合仿人机器人这种对体积、重量十分敏感的场合。在伺服系统中应用的永磁无刷电动机分为元刷直流电动机(brushless DC motor,BI。DCM)和永磁同步电动机(PMSM)两种。前者设计和生产费用低,但转动时不可避免有转矩脉动;后者正弦波驱动,理论上可完全消除转矩脉动,但需要更高精度的转子位置传感器和更复杂的控制器件”…。 2.2位置传感器 2.2.1光电编码器 在位置伺服系统中,光电编码器常被采用作为位置传感器。它具有高精度、高分辨率、工作范同大、功耗低、非接触测量等优点,但由于光栅盘是精密的光学元件,其抗振性能差,轴向的振动极易使其破碎,烟雾、灰尘等杂质也会影响光路系统。光源、镜头、光栅盘和光电传感器组成的光路系统只能轴向排布,也令光电编码器的厚度难以缩小。 目前商品化的光电编码器中,体积较小的是SCANCON公司的增量式光电编码器,其分辨率为1 000线/r,尺寸为西24 mm×24 mm。 2.2.2磁编码器 磁编码器是近年发展起来的以一种新型电磁敏感元件为基础的检测装置。这种编码器使用具有交替变化磁场的永磁体盘代替光栅盘,使用巨磁电阻(GMR)等磁敏元件代替光电元件,把磁信号变为电信号。在T作中,磁编码器不易受尘埃和结露影响,抗振能力强,可靠性高,同时其结构简单紧凑,无需复杂的光源和光学元件,易于实现小型化。 但受充磁技术的制约,磁编码器的磁极数不可能提得很高,通过控制充磁,是磁场分布呈理想的正弦波,那么可通过波形细分技术进一步提高精度和分辨率。目前商品化的磁编码器分辨率可达l 000线/r。 2.3功率器件 在中小功率的应用中,一般使用电力MOsFET或IGBT作为功率器件。电力MOSFET具有易驱动、开关速度快的优点,但其导通损耗和耐压能力之间存在矛盾,故一直局限子在低压场合使用。IGBT是一种复合型的功率器件,整合了MOsFET和BJT的优点,驱动端类似MOsFET的结构,通过电压控制,所需功率小,而开关端则与BJT相似,耐压水平高、电流大、导通损耗小。 但其关断时间较长,因此开关损耗较大,而且其导通压降为固定值,与流过电流无关,在开关电压较高的时候才能体现出其低损耗的优点。 目前主流IGBT导通压降为1.5~2.5 V,而100 V耐压的MOSFET导通电阻一般在15~30mn。仿人机器人电源电压一
安川伺服驱动器使用说明书.
资料编号SICP S800000 45C 用户手册设计2维护篇 模拟量电压2脉冲序列指令型/旋转型?-V系列 伺服单元SGDV 伺服电机SGMJV/SGMAV/SGMPS/SGMGV/SGMSV/SGMCS AC伺服驱动器 概要 面板操作器 接线和连接 试运行 运行 调整 辅助功能(Fn□□□ 监视显示(Un□□□ 全闭环控制 故障诊断 附录 版权所有? 2007 株式会社安川电机 未经本公司的书面许可,禁止转载或复制本书的部分或全部内容。iii
请事先务必阅读 本手册是对?-V 系列伺服单元的设计、维护所需的信息进行说明的手册。进行设计、维护时,请务必参照本手册,正确进行作业。 请妥善保管本手册,以便在需要时可以随时查阅。 除本手册外,请根据使用目的阅读下页所示的相关资料。 本手册使用的基本术语 如无特别说明,本手册使用以下术语。 关于重要说明 对于需要特别注意的说明,标示了以下符号。 本手册的书写规则 在本手册中,反信号名(L 电平时有效的信号通过在信号名前加(/来表示。 <例> S-ON 书写为/S-ON。 基本术语意义 伺服电机?-V 系列的SGMJV、SGMAV、SGMPS、SGMGV、SGMSV、SGMCS (直接驱动型伺服电机 伺服单元?-V 系列的SGDV 型伺服放大器 伺服驱动器伺服电机与伺服放大器的配套 伺服系统由伺服驱动器和上位装置以及外围装置配套而成的一套完整的伺服控制系统
模拟量2脉冲型伺服单元的接口规格为模拟量电压2脉冲序列指令型 M-ⅠⅠ型伺服单元的接口规格为MECHATROLINK-II 通信指令型 2表示说明中特别重要的事项。也表示可能会引起警报等,但还不至于造成装置损坏的轻度注意事项。iv ?-V 系列的相关资料 请根据使用目的,阅读所需的资料。 资料名称 机型和外围 设备的选型 想了解额定 值与特性 进行系统 设计 进行柜内 安装与接线 进行试运行 进行试运行2 伺服调整 进行维护和
Copley+驱动调试帮助
Copley驱动调试帮助向导 1.到https://www.360docs.net/doc/ec6465734.html,/Motion/Products/Software/index.html 下载CME2软件并进行安装。 2.软件安装完成后,用RS232通讯线缆将驱动器与电脑串口相连,连接完成后给驱动器上电,再点击桌面“CME2”图标打开软件,如图1 所示: 图1 点击“OK”后,出现图2界面: 图2(以XSL-230-18驱动为例) 3.驱动器基本配置 点击“Amplifier”菜单下“Basic Setup”或点击图标工具栏第一个图标,出现图3窗口:
图3 在图3中可以看到当前驱动器的配置情况,如要改变设置,请点击“Change Settings”,进入“Motor Options”设置,出现图4窗口: 图4
Motor Family(电机类别): Brushless:无刷电机 Brush:有刷电机 Three Phase Stepper:三相步进电机 Motor Type(电机类型): Rotary:旋转电机 Linear:线性电机 再点击“Next”进入“Feedback Options”设置,出现图5窗口: 图5 Hall Type(Hall类型): None:没有Hall Digital:数字Hall Analog:模拟Hall(Copley直线电机专用) 当有Hall时,请勾上“Hall Phase Correction”。 Motor Encoder(电机编码器): None:没有 Primary Incremental:主通道数字编码器接口 Secondary Incremental:第二通道数字编码器接口 Analog:模拟信号编码器接口 Low Frequency Analog:低频模拟信号编码器接口(Copley直线电机专用)Position Encoder(位置编码器): None:没有 Primary Incremental:主通道数字编码器接口 Secondary Incremental:第二通道数字编码器接口 Analog:模拟信号编码器接口
直线模组调试说明
直线模组调试说明 目录 第一章,机械、硬件显示测试 (2) 第二章,COPLEY驱动器调试 (3) 第三章,PMAC控制器配置 (9) 第四章,上位界面设置 (25) 第五章,触发脉冲问题 (30) 第六章,控制器常见问题 (31)
第一章,机械、硬件显示测试 1,安装好机械结构后,保证直线模组可以运行整个行程,当模组运行到正负限位时,普通光耦板发光二极管会熄灭,从而验证是否到达限位;有的平台由于机械干涉,但也必须保证一个轴能触碰到一个限位,否则模组不能正常运行。 2,正常通电后,IMAC-400一共有4个指示灯亮分别是:D+5V,D+12V,D-12V,A+5V。 普通光耦板有发光二极管亮,一个轴有两个限位对应两个二极管,比如设备有两个直线模组轴,那么一共应该有4路发光二极管亮。(如图三轴实例) 3,高速光耦板正常通电后,有一个红色+5V指示灯亮,8路绿色通道指示灯亮。
第二章,COPLEY驱动器调试 1,打开CME2 V6.1文件夹,点击安装Setup.exe文件。 2,使用串口与CME2软件通讯,用RS232串口通讯时,配置波特率如图,COM端口按实际情况设置。 3,通讯上后点击Motor/Feedback,进入后点击OK确定,依次确定。 4,点击File菜单下Restore->Amplifier Data,把对应轴的配置down到驱动器,然后点击 save to flash。
5,点击菜单Control Panel,如图显示,用手推动模组运行时位置反馈会有数值变化,表明从读数头到驱动器的编码器线缆正常。 6,点击Tools菜单下的Manual Phase相序测试,用手缓慢推动电机运动,Hall的三相U、V、W会实时变化,右边的指针也会随着旋转,这代表模组的Hall线缆正常。
(推荐)伺服驱动器参数设置方法
伺服驱动器参数设置方法 在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。 1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值由具体的伺服系统型号和负载情况确定。 2.位置前馈增益:设定位置环的前馈增益。设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。不需要很高的响应特性时,本参数通常设为0表示范围:0~100% 3.速度比例增益:设定速度调节器的比例增益。设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较大的值。 4.速度积分时间常数:设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较小的值。 5.速度反馈滤波因子:设定速度反馈低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡。数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。 6.最大输出转矩设置:设置伺服驱动器的内部转矩限制值。设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为ON,否则为OFF。 在位置控制方式时,输出位置定位完成信号,加减速时间常数设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。加减速特性是线性的到达速度范围设置到达速度在非位置控制方式下,如果伺服电机速度超过本设定值,则速度到达开关信号为ON,否则为 OFF。在位置控制方式下,不用此参数。与旋转方向无关。 7.手动调整增益参数 调整速度比例增益KVP值。当伺服系统安装完后,必须调整参数,使系统稳定旋转。首先调整速度比例增益KVP值.调整之前必须把积分增益KVI及微分增益KVD调整至零,然后将KVP值渐渐加大;同时观察伺服电机停止时足否产生振荡,并且以手动方式调整KVP参数,观察旋转速度是否明显忽快忽慢.KVP值加大到产生以上现象时,必须将KVP值往回调小,使振荡消除、旋转速度稳定。此时的KVP值即初步确定的参数值。如有必要,经KⅥ和KVD调整后,可再作反复修正以达到理想值。 调整积分增益KⅥ值。将积分增益KVI值渐渐加大,使积分效应渐渐产生。由前述对积分控制的介绍可看出,KVP值配合积分效应增加到临界值后将产生振荡而不稳定,如同KVP值一样,将KVI值往回调小,使振荡消除、旋转速度稳定。此时的KVI值即初步确定的参数值。
交流伺服电机驱动器使用说明书.
交流伺服电机驱动器使用说明书 1.特点 ●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制 ●脉冲序列、速度、转矩多种指令及其组合控制 ●转速、转矩实时动态显示 ●完善的自诊断保护功能,免维护型产品 ●交流同步全封闭伺服电机适应各种恶劣环境 ●体积小、重量轻 2.指标 ●输入电源三相200V -10%~+15% 50/60HZ ●控制方法IGBT PWM(正弦波) ●反馈增量式编码器(2500P/r) ●控制输入伺服-ON 报警清除CW、CCW驱动、静止 ●指令输入输入电压±10V ●控制电源DC12~24V 最大200mA ●保护功能OU LU OS OL OH REG OC ST CPU错误,DSP错误,系统错误 ●通讯RS232C ●频率特性200Hz或更高(Jm=Jc时) ●体积L250 ×W85 ×H205 ●重量 3.8Kg 3.原理 见米纳斯驱动器方框图(图1)和控制方框图(图2) 4.接线 4.1主回路 卸下盖板坚固螺丝;取下端子盖板。用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2 具体见接线图3 4.2 SIG 连接器[ 具体见接线图4 ●驱动器和电机之间的电缆长度最大20M ●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽; 或让它们捆扎在一起 ●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力 ●屏蔽驱动器侧的屏蔽应连接到.SIG 连接器的20脚,电机侧应连接到J脚 ●若电缆长于10M,则编码器电源线+5V、0V应接双线 4.3 I/F 连接