仿生扑翼飞行机理的分析研究与技术发展
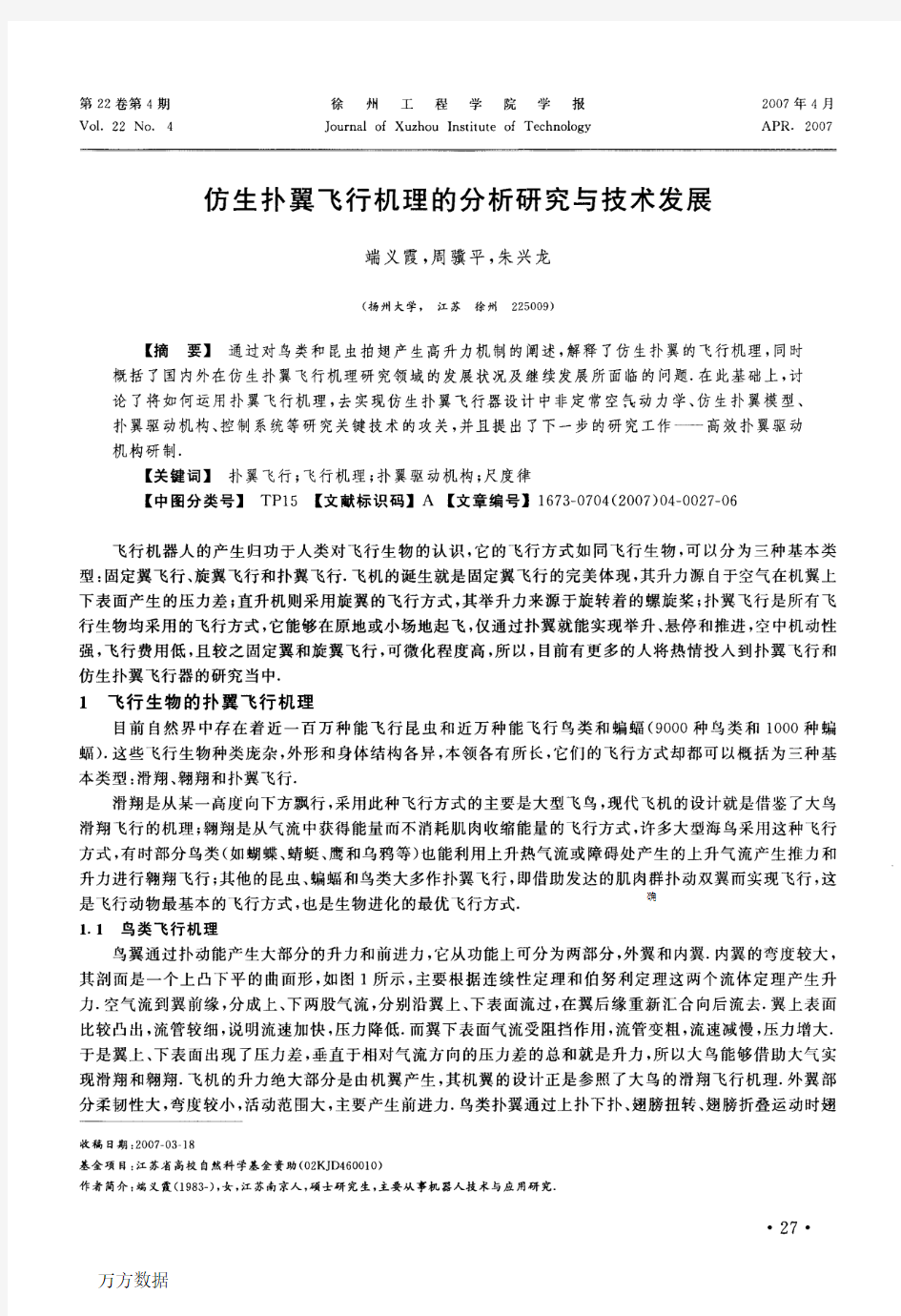

徐州工程学院学报2007年第4期膀各个部分的协调动作来产生有效的升力和前进力.
图1
鸟类内翼模型剖面图Fig.1Sectionplaneofinnerwingmodelofbirds
1.2昆虫飞行机理
昆虫的翅膀是类似的平面薄体结构,不能伸缩变形,不具滑翔能力,与鸟类的飞行相比有着本质的区别,只能通过高频振动和灵巧的扑翅运动产生足够升力.Wooton认为昆虫飞行能力和飞行技巧的多样性大半来自于翅型多样性和微妙复杂的翅运动模式[1].其翅膀在拍动过程中伴随着快速且多样性的运动,会产生不同于周围大气的局部不稳定气流,这种非定常空气动力学效应是研究和理解昆虫和小鸟飞行机理及其空气动力学特性进而实现仿生飞行的重要基础.随着对非定常流理论认识的加深,研究者们开始探讨非定常效应在昆虫飞行升力产生中发挥的重要作用,并采用非定常空气动力学理论解释昆虫飞行的机理.
分析表明,昆虫一个周期内的扑动大体可分解为四个阶段:翅膀在上扑至顶点时翅膀旋转、下扑、下扑至最低点时翅膀旋转、上扑,图2为蜂鸟悬停飞行时的扑翼轨迹.通过探索各个运动中所涉及到的空气动力学理论,可得到几种比较具有代表性的解释昆虫扑翼产生升力的机理.
图2蜂鸟扑翅过程
Fig.2Flappingprocessofwoodnymph
图3合拢与分开机制Fig.3Clap—Flingmechanism1.2.1合拢与分开(Clap--Fling)
1973年,Weis—Fogh通过观察小黄蜂生物资料,并在仔细研究了昆虫振翅飞行生物学资料的基础上,提出了拍飞(Clap--Fling)机理[2].
拍飞机理可通过图3所示的模型来解释,两翅前缘在顶点处合拢,然后两翅逐渐旋转并从前缘处分开,这时两翅问夹角增大,空气流入两翅空隙中,随着两翅间夹角增大,空气流动使得翅周围形成两个旋转涡,翅表面很快形成环流.当两翅张开到一定角度时,两翅分开,各自平动,这时两翅表面各有一个边界涡,使得下拍开始时产生尽可能大的升力.该机理可以解释一部分小型昆虫产生大升力的原因,但不适用于所有昆虫,没能从根本上揭开昆虫高升力的奥秘,却促使人们真正开始用非定常效应来解释昆虫的飞行.
1.2.2延时失速(DelayedStall)
随着流体实验技术的完善,人们开始观察吊飞昆虫的翅尖轨迹及其翅膀周围的流场,发现在下拍过程中?28?
端义霞,等:仿牛扑翼飞行机理的分析研究与技术发展
翅前缘产生分离的流场,称为前缘涡(LEV),见图4.涡快速转动,造成翅上方低压,从而产生较大的升力;涡逐渐由前缘向后缘流去,升力就会迅速减小.
图4下拍过程中的前缘涡
Fig.4Leading--edge
vortexesproduced图5上拍产生新的前缘涡Fig.5Newleading--edgevortexesproducedbydownstrokebyupstroke
如果前缘涡流出,失速现象将会发生.实际卜,在一个扑动周期结束前缘涡脱落时,下一周期翅膀旋转后上拍又将产生新的前缘涡,见图5.1996年,英国剑桥大学的Ellington等通过对飞蛾动态比例模型的流体观察实验研究‘3“i,发现翅前缘背面产生的前缘涡在昆虫翅膀下拍得整个平动过程中都不脱落,使高升力得以保持,从而揭示了延时失速(DelayedStall)机理.
1.2.3旋转环流(RotationalCirculation)和尾流捕获(WakeCapture)
1999年,美国加州大学伯克利分校的Dickinson等为了能进一步解释昆虫产生大升力的机理,用果蝇翅的比例放大模型进行了实验研究口],发现在翅上拍和下拍过程的开始时刻和结束时刻,分别有一个升力峰.这样,Dickinson将昆虫的翅拍动周期分为四个部分,两个平动部分(上拍和下拍)和两个转动部分(翅翻转),并认为昆虫飞行的高升力是通过“延迟失速”,“旋转环流”(Rotationcirculation)和“尾流捕获”(wakecapture)三个机理相互作用获得的.“延迟失速”是翅平动时产生升力的机理,“旋转环流”和“尾流捕获”则是翅转动时产生升力的机理[51:.
旋转环流产生升力的机制可用马格纳斯效应(Magnuseffect)阐述.翅膀在流体中同时作平动和转动,将产生类似于棒球旋转的马格纳斯效应。8j.翅膀按图6所示方向平动和转动时,空气沿平动相反方向流过,翅膀上表面流速大于下表面,使得上部压强小于下部压强,翅膀产生向上的升力.
平动v转动+平动
图6
昆虫翅膀的旋转环流机制Fig.6Rotationcirculationmechanismofinsect’Sflying
尾流捕获机理是由翅回拍造成的.翅在下拍或上拍的初始时刻,遇到了上个上拍或下拍结束时刻损失的能量形式,形成尾流,增大了翅与流体的相对速度.此时,尾流在瞬间增大了昆虫的升力,从而产生了一个升力峰‘….
SrygleyRBCl0]等还提出昆虫在飞行过程中。并不是始终采用某一种或某几种机理,而是根据气流的状态和飞行的方式,采用不同的非定常机理来获得升力.
?29?
仿生扑翼飞行机理的分析研究与技术发展
作者:端义霞, 周骥平, 朱兴龙, DUAN Yi-xia, ZHOU Ji-ping, ZHU Xing-long
作者单位:扬州大学,江苏,徐州,225009
刊名:
徐州工程学院学报
英文刊名:XUZHOU INSTITUTE OF TECHNOLOGY
年,卷(期):2007,22(4)
参考文献(24条)
1.SRI Artificial muscle transducers
2.戴莱 J W;哈里曼 D R F空气动力学 1983
3.Sane S P;Dickinson M H The aerodynamic effects of wing rotation and a revised quasi-steady model of flapping flight[外文期刊] 2002
4.Dickinson M H;G?tz K G The wake dynamics and flight forces of the fruit fly drosophila melanogaster[外文期刊] 1996
5.Dickinson M H;Lehmann F-O;Sane S P Wing rotation and the aerodynamic basis of insect flight[外文期刊] 1999
6.Berg C V D;Ellington C P The vortex wake of a 'hovering' model hawmoth[外文期刊] 1997(1351)
7.Berg C V D;Ellington C P The three-dimensional leading-edge vortex of a 'hovering' model hawkmoth [外文期刊] 1997(1351)
8.Weis-Fogh T Quick estimates of flight fitness in hovering animals,including novel mechanisms for lift production 1973
9.陶晔;周骥平仿生扑翼飞行器扑翼驱动机构的设计探讨[期刊论文]-机械设计与研究 2006(02)
10.杨智春;李思政;舒忠平一种柔性微型扑翼设计及其气动力特性的试验研究[期刊论文]-机械科学与技术
2006(01)
11.曾锐;昂海松;梅源柔性扑翼的气动特性研究[期刊论文]-应用力学学报 2005(01)
12.杨爱明;翁培奋微型飞行器小展弦比机翼的低雷诺数气动力特性分析[期刊论文]-空气动力学学报 2005(01)
13.周建华;颜景平;王姝歆微型仿昆飞行机器人翅运动模型及气动力分析[期刊论文]-扬州大学学报(自然科学版) 2004(01)
14.刘岚;方宗德;候宇仿生微扑翼飞行器的翅翼设计与优化[期刊论文]-机械科学与技术 2005(03)
15.周骥平;武立新;朱兴龙仿生扑翼飞行器的研究现状及关键技术[期刊论文]-机器人技术与应用 2004(06)
16.王姝歆;周建华;颜景平微小型仿生飞行机器人柔性翅的仿生设计与实验研究[期刊论文]-实验流体力学
2006(01)
17.曾锐;昂海松仿鸟复合振动的扑翼气动分析[期刊论文]-南京航空航天大学学报 2003(01)
18.孙茂;吴江浩微型飞行器的仿生流体力学-昆虫前飞时的气动力和能耗[期刊论文]-航空学报 2002(5)
19.兰世隆;孙茂模型昆虫翼作非常运动时的气动力特征[期刊论文]-力学学报 2001(2)
20.曾理江;宋德强;郝群昆虫运动机理的研究[期刊论文]-光学技术 1999(06)
https://www.360docs.net/doc/205264552.html,bes S A Wing flexibility and design for animal flight 2002
22.Liu H;Ellington C P;Kawachiy K A computational fluid dynamic study of hawkmoth hovering[外文期刊] 1998
2002(12)
24.Wootton R J The mechanical design of insect wings[外文期刊] 1990
本文链接:https://www.360docs.net/doc/205264552.html,/Periodical_pczydxxb200704007.aspx
宫崎骏动漫中的飞行器这些在现实中都有原型(超长多图)
宫崎骏动漫中的飞行器,这些在现实中都有原型(超长多图) 宫崎骏动漫中的飞行器有哪些在现实中有原型?左小鹤,95后黄道第一宫 在宫崎家族经营的“宫崎航空兴学”环境下长大的宫崎骏从小耳濡目染,由衷热爱飞机、飞行。这种热爱完完全全体现在宫崎导演大部分的动画作品中。宫崎导演收藏各式各样有关飞机的资料图鉴。导演的资料库中有一个飞机档案,他视作珍宝,看过的人寥寥无几,可以算是“机密”级别的了。下面给楼主整理一份宫崎骏导演作品中出现的飞机和飞行 器及部分的参考原型。 (图片部分来源于网络,侵删) 《风之谷》1984 故事发生在1000 年后的《风之谷》,故事讲述了生长于风之谷的纯真少女娜乌西卡就背负着拯救世界的命运。她是希望的代表及化身,善于“用心捕捉心灵的歌声”,在人类与虫族之间架起“心”的桥梁。一边要安抚发怒的虫族,一边要阻止人类对虫族的袭击。宫崎导演的成名之作,其中大型
的飞行机器,超人的飞行设想,都是奠定了宫崎导演以后的作品的其中一个轴心的风格。 ·多鲁美奇亚军队的运输机 (动画截图) (设计手稿) 原型:德国ME-323 运输机与Do217 轰炸机 ·炮艇机 (模型) (设计手稿)也是无尾翼的飞行器 ·娜乌西卡的滑翔翼 (动画截图) (设计手稿) 原型:飞翼布局式飞机 由无尾翼布局发展过来,直接删去飞机尾翼 无尾翼布局的飞机在二战之前,一直是飞机设计师工程师的
想法。直到德国梅塞施密特公司在1943 年修改完成了 Me163 无尾火箭截击机的设计方案,并在1944 到1945 年间大批量的生产,使得无尾飞机第一次出现在人类的航空史上。 (Me 163 无尾火箭截击机) (为什么叫“无尾翼飞机”的Me163 看上去还是有尾翼?这里的“无尾翼”指的是删去了水平尾翼或者鸭翼的布局方式* 鸭翼是另一种置翼方式,不多说了) (YB-49 翼式飞机) 美国诺斯洛普公司在1941 年完成全对两架翼式飞机 XB-35 改装的任务,将其改装为完全使用喷气动力的 YB-49,而YB-49 就是最著名的飞翼布局飞机B-2 轰炸机的前身. 人类目前飞翼布局的飞机仍然很难达到娜乌西卡的滑翔翼 那样驾驶自如的水平,像是较新的X-48B 或是波音公司正在限制的波音797,都还难以实现“穿梭自如”这样的突破。 (飞机开发者八谷和彦乘坐“海鸥”试飞中) 但如果只论“型”的话,来自日本的飞机开发者八谷和彦以娜乌西卡的滑翔翼为原型研制出了“海鸥”,目前已进行过
扑翼机教案
扑翼机教案 教学摘要 一、介绍人类早期憧憬飞翔,征服天空的漫长经历。 教师:人类很早就憧憬像鸟儿一样在空中飞翔,15世纪的伟大艺术家、发明家达芬奇曾经设计过一种扑翼机,设想人趴在上面,用手脚带动一对翅膀飞起来,古代的中国人,希腊人,巴比伦人和印度人也都做过无数次类似的尝试。但是人没有鸟儿的肌肉和骨骼,所以他们的理想也就是没有办法实现的。 目前世界上最大的宇宙航空博物馆——美国华盛顿的史密斯宇航博物馆的大厅里,有这样一条标语“人类最早的飞行器是中国的风筝和火箭”。 1801年,英国的乔治.凯里爵士研究了风筝和鸟的飞翔原理,在1809年试制了人类第一架滑翔机,并进行了载人飞行。 准备材料 演示用的扑翼机、扑翼机套件。 一、活动介绍 通过制作扑翼机模型,让学生了解扑翼机的飞行原理,同时提高他们动手实践的能力。 二、教学目标 1、实践目标:了解扑翼机的飞行原理,让学生在实践中探索。 2、技能目标:通过学生自己动手操作,制作出一架简单的以橡筋为动力的扑翼模型机,锻炼动手能力,培养创新精神和实践能力。 三、教学方式 1、教师引导:教师引导学生探讨扑翼机的起源及飞行原理,总结飞行原理。 2、分步骤讲解扑翼机的制作过程。
3、指导制作:学生人手一份材料,动手制作扑翼机。 4、指导试飞:学生制作完毕后,集体到固定场所试飞,检验劳动成果。 5、分组调试:学生制作的扑翼机不能保证每架都能有很好的飞行效果。针对出现的问题飞机,教师指导,学生集体讨论,分析问题来源。然后进行调试,使扑翼机达到最佳的飞行效果。 6、教师对学生的制作情况进行评价。 四、教学过程 1、引入原理 扑翼机的发明起源可以追溯到欧洲文艺复兴时期鼎鼎大名的艺术家达·芬奇,最初根据鸟飞行的原量设计出了扑翼结构。虽然在实践中没能成功,但是利用杠杆传动带动机翼上下摆动。这一巧妙的原理,启发了后人。我们今天制作的这架扑翼机就是利用了曲轴结构原理(是一种直线运动与典线运动相互转化机动原理)而设计的。 2、介绍扑翼机的构造及飞行原理。 构造 机身:固定连接机翼。 机翼:为飞机提供向上的升力。 尾翼:操作飞机仰俯和偏转,保证飞行能平稳飞行。 原理:扑翼机是按照仿生物原理设计,模拟鸟类真实飞行的新型航空模型器材,能在空中扑翅飞行,具有较高的趣味性和培养青少年动手能力的特点。 3、教师讲解扑翼机的制作过程,并指导学生制作。 步骤
内部控制国内外研究现状
内部控制的国内外研究现状分析 一、内部控制理论国外研究状况分析 内部控制概念的提出至今已有五十多年历史。内部控制, 是在内部牵制的基础上, 由企业管理人员在经营管理实践中创造, 并经审计人员理论总结而逐步完善的自我监督和自行调整体系。在其漫长的产生和发展过程中, 大体经历了萌芽期、发展期和成熟期三个历史阶段, 即内部控制、内部控制结构和内部控制整体框架三个阶段。 从1949 年美国会计师协会(AICPA) 的审计程序委员会在《内部控制: 一种协调制度要素及其对管理当局和独立注册会计师的重要性》的报告中,首次对内部控制作了定义。内部控制在50 年时间内分为三个发展阶段, 第一阶段到第二阶段经历近40 年, 而第二阶段到第三阶段只有5 年时间。内部控制之所以有这么快的发展速度, 除企业内部管理自身因素外, 外部尤其是政府的推动亦是关键因素。在美国20 世纪70 年代到80 年代, 政府通过一系列措施推动内部控制的实施。 80 年代一些舞弊性财务报告和企业“突发”破产事件导致美国国会一些议员对财务报告制度的恰当性提出了疑问,尤其是上市公司内部控制的恰当性, 由此成立Treadway 委员会( 即反对虚假财务报告委员会) ,并发表了著名的COSO 报告。20 世纪80 年代证券交易管理委员会( SEC) 也对内部控制产生一定的影响。SEC 在1980 年的S—X 规则303 条款中要求上市公司披露“管理当局讨论和分析( MD&A) ”的信息。MD&A 要求揭示上市公司财务和经营相关的当前和未来的流动性和其它情况, 所以要求向公众提供更多未来经管责任的情况,
包括内部控制等内容。“安然”事件发生后, 美国国会于2002年7 月通过《萨班斯—奥克斯利法案》( Sarbanes-Oxley Act) , 强化了一系列控制措施, 如完全由独立董事组成的审计委员会对财务报告、内部控制检查等。 COSO 报告指出:内部控制是一个过程, 受企业董事会、管理当局和其他员工影响, 旨在保证财务报告的可靠性、经营的效果和效率以及现行法规的遵循。它认为内部控制整体架构主要由控制环境、风险评估、控制活动、信息与沟通、监督五项要素构成。COSO 报告首次把内部控制从原来的平面结构发展为立体框架模式, 代表着国际上在内部控制方面的最高研究水平。此后发布的其他一些有关内部控制的报告( 如加拿大的COSO, 英国的Cadbury, 南非的King, 法国的Vienot 等等) 均以COSO 的报告为模本。我国的《内部会计控制规范和巴塞尔银行监管委员会的》银行组织的内部控制系统框架也是以COSO 的报告为基础的。但我国大部分企业管理层甚至许多内审人员对内部控制的内涵与外延的理解还停留在内部牵制的第一阶段,认为内部控制就是“职责分工、岗位分离、授权授信、内部审计等”, 与国际水平还有相当的差距。 根据COSO 报告, 内部控制应理解为: “由管理当局设计( devised) , 董事会核准, 董事会、管理当局和其他员工共同实施( maintained) 的, 旨在为实现组织目标提供合理保证的一个过程( pro—cess) ”。可见, 内部控制是为了达到目的的一个过程, 但它本身不是目的; 它帮助实现的是多种既互相区分而又紧密联系和相互重叠的目标; 它由人实
【CN209719925U】一种仿生飞行器的机体【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920486151.0 (22)申请日 2019.04.11 (73)专利权人 烟台大学 地址 264000 山东省烟台市莱山区清泉路 32号 (72)发明人 徐翊航 魏贤智 孙龙 牟宗亮 赵天可 王帅 许娜 于涛 (74)专利代理机构 烟台上禾知识产权代理事务 所(普通合伙) 37234 代理人 丁宝君 (51)Int.Cl. B64C 33/00(2006.01) (54)实用新型名称一种仿生飞行器的机体(57)摘要本实用新型涉及一种仿生飞行器的机体,包括安装在一起的机体、尾翼系统和翼臂;所述的机体包括前后两个安装板和一个前安装板;脊柱杆和翼杆将两个安装板和前安装板串联,主轴和两个翼轴将两个安装板连接;主轴上位于两个安装板之间安装有一个主齿轮和一个传动齿轮,一条翼轴上安装一个次传动齿轮,两个翼杆穿出安装板的的端部各安装一个翼齿轮,传动齿轮咬合次传动齿轮,两个翼齿轮互相咬合;在一个安装板上还安装一个电机,电机的输出端安装电机齿轮,电机齿轮与主齿轮咬合;在前安装板和与其相邻的安装板之间安装两组曲柄联动系统。齿轮和其安装的杆件上,是通过键和键槽固定的。本 申请的结构实现了飞行器的仿鸟类的飞行动作。权利要求书2页 说明书4页 附图3页CN 209719925 U 2019.12.03 C N 209719925 U
权 利 要 求 书1/2页CN 209719925 U 1.一种仿生飞行器的机体,其特征在于,包括安装在一起的机体(1)、尾翼系统(3)和翼臂(2);所述的机体(1)包括前后两个安装板(1.1)和一个前安装板(1.2);安装板(1.1)的中心设置有安装主轴(1.8)的轴孔,以及在安装板(1.8)上设置有一对安装翼轴(1.7)的轴孔和一对安装翼杆(1.5)的安装孔,在安装主轴(1.8)的轴孔和安装翼杆(1.5)的安装孔之间的安装板上设置安装脊柱杆(1.6)的安装孔;前安装板(1.2)上设置有一个用于安装脊柱杆(1.6)的安装孔和两个翼杆(1.5)的安装孔;脊柱杆(1.6)和翼杆(1.5)将两个安装板(1.1)和前安装板(1.2)串联,主轴(1.8)和两个翼轴(1.7)将两个安装板(1.1)连接;主轴(1.9)上位于两个安装板(1.1)之间安装有一个主齿轮(1.11)和一个传动齿轮(1.12),一条翼轴(1.7)上安装一个次传动齿轮(1.13),两个翼杆(1.7)穿出安装板(1.1)的端部各安装一个翼齿轮(1.14),传动齿轮(1.12)咬合次传动齿轮(1.13),两个翼齿轮(1.14)互相咬合;在一个安装板(1.1)上还安装一个电机(1.9),电机(1.9)的输出端安装电机齿轮(1.10),电机齿轮(1.10)与主齿轮(1.11)咬合;在前安装板(1.2)和与其相邻的安装板之间安装两组曲柄联动系统。 2.根据权利要求1所述的仿生飞行器的机体,其特征在于,所述的曲柄联动系统包括传动杆一(1.16)、传动杆二(1.15)、传动杆三(1.4)和翼连接块(1.3);所述的传动杆一(1.16)通关销轴连接传动杆二(1.15)的一端,传动杆二(1.15)的另一端通过销轴连接传动杆三(1.4)的一端,传动杆三(1.4)的另一端通过螺钉与翼连接块(1.3)固定。 3.根据权利要求2所述的仿生飞行器的机体,其特征在于,所述的传动杆一(1.16)的另一端与一根翼轴(1.7)的端部固定连接;所述的翼连接块(1.3)夹持在安装板(1.1)和前安装板(1.2)之间,且穿过安装板(1.1)和前安装板(1.2)的翼杆(1.5)也穿过翼连接块(1.3)。 4.根据权利要求3所述的仿生飞行器的机体,其特征在于,所述的翼连接块(1.3)的端部安装翼臂(2),所述的翼臂(2)包括主翼臂(2.1)和副翼臂(2.2),以及连接主翼臂(2.1)和副翼臂(2.2)的连接组件(2.3)。 5.根据权利要求4所述的仿生飞行器的机体,其特征在于,所述的连接组件(2.3)包括一个主翼臂连接件(2.3.1)和副翼臂连接件(2.3.2);所述的主翼臂连接件(2.3.1)包括连接件本体(2.3.1.1)和连接件本体(2.3.1.1)一端两侧的限位板(2.3.1.2),两个限位板(2.3.1.2)之间的连接件本体(2.3.1.1)上设置两个铰接耳(2.3.1.3);所述的副翼臂连接件(2.3.2)包括连接件本体一(2.3.2.1)和连接件本体一(2.3.2.1)一端的一个铰接耳一(2.3.2.2);铰接耳一(2.3.2.1)插装在两个铰接耳2.3.1.3之间并用销轴安装。 6.根据权利要求5所述的仿生飞行器的机体,其特征在于,所述的两个限位板(2.3.1.2)之间的夹角不小于60°,且不大于90°。 7.根据权利要求1所述的仿生飞行器的机体,其特征在于,所述的安装板(1.1)为一个圆形的镂空板面,且在圆周上设置有两个尖角。 8.根据权利要求1所述的仿生飞行器的机体,其特征在于,所述的前安装板(1.2)成V字形结构。 9.根据权利要求1所述的仿生飞行器的机体,其特征在于,所述的脊柱杆(1.6)穿出安装板(1.1)的部分安装尾翼系统(3),尾翼系统(3)包括成T字形分布的尾翼、控制箱和安装在控制箱上且位于脊柱杆两则的凸轮手柄。 10.根据权利要求9所述的仿生飞行器的机体,其特征在于,所述的控制箱包括控制箱 2
仿生学发展过程的分析_刘福林
仿生学发展过程的分析 刘福林 (商丘师范学院生命科学系,河南商丘476000) 摘要 仿生学在科学创新中具有重要作用,国内外学者对此进行了大量研究。在回顾分析仿生学重大事件的基础上,提出了仿生学经历了4个发展时期:萌芽时期、建立时期、巩固时期与现代时期,指出了仿生学的重大贡献是源头创新的研究理念与方法,并能在未来的所有领域内应用、取得突破性研究成果。 关键词 仿生学;重大事件;发展时期;研究方法 中图分类号 Q811 文献标识码 A 文章编号 0517-6611(2007)15-04404-02 A na lysis of the Developm ent P ro gress o f Bio nics LIU Fu-lin (Depart ment of Life Scien ce,S hangq iu Normal College,Shangqiu,Henan476000) A bstract The research on the bionics is imp ortan t in science innovation all over the word.In the article four devel op ment periods of b ionics includ in g bu ddin g,b uild ing,strengthen and modern were reviewed.The i mportant contribution of bionics to research idea and means of resource in novation was pointed out,which may be ap plied in all fiel ds in future for unpreced ented res earch results. Key w ords B ion ics;Great event;Devel op ment period;Research means 仿生学的诞生与发展过程分为4个时期:仿生学萌芽时期;仿生学建立时期;仿生学巩固时期;现代仿生学时期。 1 仿生学的萌芽时期(远古时代至1940年) 在人类文明的早期,为了生存,人类不得不对其赖以饱腹的动植物的生活习性以及周围世界的各种自然现象进行观察。因此,从远古时代起,人们实际上就已在从事仿生学工作。例如,相传春秋战国时代(公元前450~500年),鲁班上山伐木途中,手指为茅草划破,从而受到启发,经反复实践,终于制成了人类史上第一架带有锯齿的木工锯[1]。2300多年前墨子和他的300弟子,花了3年时间,造成一只“会飞的木鸟”,同时间希腊人阿奇太也制成一只“机械鸽子”。自古就有许多中外人士模仿鸟类飞行试制飞行器,但都不成功,原因在于不了解鸟类的形态构造和生理机能适于飞行的科学原理;又不了解人不具备飞行的生理条件,人要上天,必须依靠机械动力才有可能。1903年12月17日,美国人莱特兄弟飞机飞行的成功便是一例。另外,1884年,人们受到蚕食桑叶吐丝的启迪,利用硝酸液处理棉绒,制成硝酸纤维素,由法国化学家德贝尔尼戈·夏尔多内首次成功地将硝酸纤维素制成硝酸纤维。同年,英国人查尔斯·克劳斯(Charles·F·Cr oss)和爱德华·贝文(Edwa rd·J·Be van)申请了第1个醋酸纤维制造方法的专利,这两种纤维的问世是仿生学运用的成果。但这些发明和尝试,在人类文明史上犹如点点星火,一闪而灭,始终未能形成一门独立的学科[2]。总之,20世纪40年代前,人们对于生物体与机器之间有无共同之处,还缺乏明确认识,还不具备将二者进行类比的必要的基础知识。工程技术人员还不了解生物系统可成为各种技术思想、设计原理以及发明创造的源泉,生物学家也只局限于研究和描述生物结构的精巧、功能的神奇。因此,从远古到1940年属于仿生学的萌芽时期。该时期,人类的各种仿生现象与成果不断涌现,为这门科学的诞生积蓄了实践经验与感性认识。 2 仿生学的建立时期(1940~1960年) 20世纪40年代,工程技术领域中出现了调节理论,人们开始在一般意义上把生物与机器进行类比,认识到二者具有 作者简介 刘福林(1965-),男,河南商丘人,副教授,从事管理仿生学研究。 收稿日期 2007-02-28自动调节系统。1944年,一些科学家已经明确机器与动物在自动控制、通信和统计动力学等一系列问题上是统一的,具有共同之处。同一个时期,美国的一位年轻工程师申农(C. Sha nnon)提议建立了一门叫作“信息论”的科学。从此,开展了大量关于信息传递与处理的研究工作,深刻认识到一切通信与控制系统所共有的特点。对许多研究工作得到的结果进行理论概括,并将技术控制系统的控制机理与现代生物科学所发现的动物体中的某些控制机理进行类比,又逐渐形成了一门新的科学“控制论”。1949年,控制论创始人、美国科学家维纳(N.Wie ner)出版了《控制论》一书,对这一学科的思想和概念等作了比较全面的论述。维纳着重指出,控制论是研究机器和生物体中控制与通信的科学。科学研究和生产实践完全证实了生物和机器在许多问题上的共同之处。而控制论则把生物科学和工程技术从理论上联系起来,成为在原理上沟通生物系统与技术系统的桥梁,奠定了生物与机器在控制与通信上进行类比的科学理论基础。随着这两门学科的结合与渗透,人类就为自已找到了一条新的技术发展道路———向生物界索取设计蓝图,并于1960年9月诞生了一门新的交叉科学———仿生学。1960年9月13~15日,在美国俄亥俄州达顿城(Da yto n)的一个空军基地,召开了美国第一届仿生学讨论会。在20世纪50年代已成为一门独立学科的“仿生学”,在这次会议上被正式命名。一位专长于精神病学和神经学、又受过数学和电子学训练的美国军医J.E.斯蒂尔(Jac k Ellwo od Steel)博士,给这门新诞生的科学分支起了一个名字叫做bionics(仿生学)。斯蒂尔博士给它下了这样一个定义:“仿生学是模仿生物系统的原理以建造技术系统,或者使人造技术系统具有生物系统特征或类似特征的科学”,简单一句话,仿生学就是“模仿生物的科学”[3]。因此,从1940~1960年属于仿生学的建立时期。 该时期,人类在仿生学研究中的最大贡献是建立了仿生学理论。从实质上看,仿生学的诞生带给人类的是创新的理念与方法,即向生命系统学习的理念,模拟生命系统的方法。使人类从一个崭新的视角透视世界,发现前人未发现的事物,实现科学技术的原始创新,这是其他科学无法比拟的优势。 “提出模型,进行模拟,这就是仿生学的基本研究方 安徽农业科学,J ou rn al of An hui Agri.Sci.2007,35(15):4404-4405,4408 责任编辑 罗芸 责任校对 李洪
仿生扑翼飞行器的发展与展望
仿生扑翼飞行器的发展与展望 摘要:本文简要介绍了仿生扑翼飞行器的概念、特点及其历史,概述了仿生扑翼飞行器在国内外早期和当前的研究现状及未来的发展趋势。在此基础上,就目前研究中迫切需要解决的一些关键技术进行了讨论,并结合目前研究情况,对我国仿生扑翼飞行器的未来发展前景进行了展望。 关键词仿生;扑翼飞行器;微型飞行器;关键技术 Abstract:The concept,characteristics and usage of flapping-wing air vehicle are briefly introduced.The present research situation and future development trend of FA V are summarized. According to these,several key technologies of FA V are discussed.Taking into account the present situation .the future on the research of FA V in China is outlined. Key words:Bionics ; Flapping-wing air vehicle ; Micro air vehicle ; Key technology 1仿生飞行的历史与进展 1.1向鸟类学习 在中国两千年以前的航空神话和传说中,就有“人要是长着翅膀,就能在空中飞行”、“人骑着某种神奇的动物,可以飞行”等反映古人飞行理想和愿望的文字记载。多数昆虫长着一左一右两个或4个翅膀,他们都是飞行家,飞行技术非常高明。但因为昆虫比较小,翅膀的运动速度太快,不易被观察,在古人眼里,只认为鸟类是可以模仿的、最好的飞行家。传说中春秋时代(公元前770-前481)后期,鲁国著名的能工巧匠公输盘(有些史籍也记作“公输班”)研究并花费3年时间制造了能飞的木鸟,又名木鸢。如图所示 1.2实现飞行 1783年,法国蒙哥尔费兄弟发明热气球并载人飞行,开始了人类真正的空中航行。在人类利用轻于空气的航空器获得成功的 同时,也对重于空气的航空器一飞机进行探索和试验。英国的乔治.凯利(Cayley G)率先提出利用固定机翼产生升力的概念,他把鸟的飞行原理从上升和推进两种功能区别 开来,设计制造了能载人的滑翔机。1903 年莱特兄弟在滑翔机基础上加装自制内燃 机制成的“飞行者”1号试飞成功,持续时间59秒,标志着动力飞机飞行成功,开辟了人类的飞行新纪元,人类翱翔蓝天的梦想 得以真正实现。 1.3微型飞行器 1992年,美国国防高级研究计划局召开了关于未来军事技术的研讨会,第一次提出了微型飞行器MAY(Micro Air Vehicle)的概念,并提出其量级与昆虫及小鸟相似。从现有的研究情况看,微型飞行器按其飞行方式可分为传统的固定翼布局、旋翼布局和仿生扑翼式布局3类。固定翼式和旋翼式微型飞行器的研究迄今为止都达到了相当的水平。2000年8月,“Black Widow”原型机经过不断改进后,留空时间达到30分钟,最大活动半径为1.8km,最大飞行高度约235m,飞行重量为80克。旋翼微型飞行器因能垂直起降和悬停,比较适宜于在室内等狭小空间或较复杂地形环境中使用。回顾人类飞行的历史,研究者们重新认识到,纵观自然界的飞行生物,无一例外均采用扑翼的飞行方式,扑翼飞行是生物进化的最优飞行方式。于是人们又开始着眼于扑翼飞行器的研究。微型扑翼飞行器的机动性、灵活性及低能耗等方面可与蜻蜓、蜜蜂、或蜂鸟等飞行生物相媲美。经过近20年来研究者们的共同努力,微型扑翼飞行器在仿生学飞行机理、能
仿生扑翼飞行器设计与制作
仿生扑翼飞行器设计与制作 摘要:随着仿生学的发展和材料动力技术的不断进步,人类能更好的模仿生物的运动,向大自然学习,服务人类。像鸟一样的飞行是人类几千年的梦想,近几年科研人员在扑翼飞行器的研究和制造方面有了很大的发展,目前世界上已经出现了许多扑翼飞行器,但其仿生程度任然较低。通过学习和研究我们选用了对称的五杆机构来实现飞行器的机翼的动作,并按照飞行原理设计了飞行器的升力机构和推力机构,最后做出了实物,进行了飞行试验。 关键词:仿生;扑翼飞行器;五杆机构;空气动力学;飞行试验 Designing and producting of the flapping wing flight vehicle in bionics ABSTRACT: Along with the development of bionics and material power technology advances, mankind can better imitate biological movement, learning to nature and servicing human. Flying Like a bird is the dream of human for several thousand years, In recent years researchers Made great progress in the flapping wing flight vehicle research and manufacturing. There are already some kind of the flapping wing flight vehicles in the word recently, but the bionic degree lower still. With the studying and researching we choose the symmetrical five-bar mechanism to realize the action of the wing of the aircraft, According to the principle of fly. I design the lift institutions and thrust institutions. Finally I made the craft, and test it. KEY WORDS:Bionic; The flapping wing flight vehicle; Five-bar mechanism; Aerodynamics; Flight test
仿生学论文综述
仿生学论文 10级生物科学 1009210117 张荣华
摘要 自然界生物在漫长的进化过程中优胜劣汰,为了生存、自卫、竞争和发展的需要,强化了自身许多优异的结构和特殊功能。人们模仿生物界的这些结构特征,将它们应用于自身的斗争,即军事斗争中。利用生物的结构和功能原理来研制机械或各种新技术的科学。解决在日常的生产生活中遇到的问题,制造多种探测、斗争武器。 关键词:生物结构特殊功能实践运用军事
一.仿生学简介 仿生学(bionices)在具有生命之意的希腊语言bion上,加上有工程技术涵义的ices而组成的词语。大约从1960年才开始使用。生物具有的功能迄今比任何人工制造的机械都优越得多,仿生学就是要在工程上实现并有效地应用生物功能的一门学科。例如关于信息接受(感觉功能)、信息传递(神经功能)、自动控制系统等,这种生物体的结构与功能在机械设计方面给了很大启发。可举出的仿生学例子,如将海豚的体形或皮肤结构(游泳时能使身体表面不产生紊流)应用到潜艇设计原理上。仿生学也被认为是与控制论有密切关系的一门学科,而控制论主要是将生命现象和机械原理加以比较,进行研究和解释的一门学科。 1.历史由来自古以来,自然界就是人类各种技术思想、工程原理及重大发明的源泉。种类繁多的生物界经过长期的进化过程,使 它们能适应环境的变化,从而得到生存和发展。劳动创造了人类。人类以自己直立的身躯、能劳动的双手、交流情感和思想的语言,在长期的生产实践中,促进了神经系统尤其是大脑获得了高度发展。因此,人类无与伦比的能力和智慧远远超过生物界的所有类群。人类通过劳动运用聪明的才智和灵巧的双手制造工具,从而在自然界里获得更大自由。人类的智慧不仅仅停留在观察和认识生物界上,而且还运用人类所独有的思维和设计能力模仿生物,通过创造性的劳动增加自己的本领。 鱼儿在水中有自由来去的本领,人们就模仿鱼类的形体造船,以木桨仿鳍。相传早在大禹时期,我国古代劳动人民观察鱼在水中用尾巴的摇摆而游动、转弯,他们就在船尾上架置木桨。通过反复的观察、模仿和实践,逐渐改成橹和舵,增加了船的动力,掌握了使船转弯的手段。这样,即使在波涛滚滚的江河中,人们也能让船只航行自如。鸟儿展翅可在空中自由飞翔。据《韩非子》记载鲁班用竹木作鸟“成而飞之,三日不下”。然而人们更希望仿制鸟儿的双翅使自己也飞翔在空中。早在四百多年前,意大利人利奥那多·达·芬奇和他的助手对鸟类进行仔细的解剖,研究鸟的身体结构并认真观察鸟类的飞行。设计和制造了一架扑翼机,这是世界上第一架人造飞行器。 2.研究方法仿生学是生物学、数学和工程技术学互相渗透而结合成的一门新兴的边缘科学。第一届仿生学会议为仿生学确定了一个有趣而形象的标志:一个巨大的积分符号,把解剖刀和电烙铁“积分”在一起。这个符号的含
内部控制的国内外研究现状分析
1.内部控制的国内外研究现状分析 摘要:内部控制可谓是近年来研究的热点,特别是在二十世纪以来国内外频频发生财务丑闻时,在把矛头直指向财务会计报告时,也在探索企业内部治理等问题。并把问题的症结和解决途径归到了内部控制。加强和完善企业内部控制,已成为理论界和实务界关注的焦点之一。内部控制作为企业管理中的一个重要内容,就越来越受到人们的关注。本文对国内有关内部控制研究做了一个简要的整理和分析。 [关键词]内部控制;理论探讨;应用探讨 一、我国内部控制研究基本状况分析 本文所选的样本主要是中国知识资源总库中的中国期刊全文数据库作为总样本选取的,以内部控制为篇名搜索,从1999年到2008年,总共有9912篇文章,其中核心期刊有2153篇。这些文章基本上能够代表我国这些年来研究内部控制的水平,本文期望能够从中把握我国研究内部控制的脉搏,对内部控制的研究现状作一个较全面的分析。 1.从发表时间来看,就笔者收集的资料,我国理论和实务界对内部控制的研究,多集中于二十世纪初期几年。这可能要基于美国资本市场发生的几宗大的财务丑闻和对公司内部控制的反思而推出相关的法律和政策规范,所以在对美国财务丑闻的分析研究和出台政策的剖析的文章就层出不穷。笔者认为这也体现了我国内部控制研究人员的前瞻性,从国外的经验教训中就能让我们避免这样的错误发生,美国一直是一个在健全法律和制定政策方面做得比较前沿,涉及内部控制的就先有COSO报告,后有SOX法案的颁布和COSO委员会出台的ERM,目前都被认为是规范内部控制的高质量标准。除了美国以外,我国也发生了诸如“银广厦”、“中航油事件”等事件,针对这些个案,在诸如《会计研究》这样的期刊上都有深入的分析,当然也有针对我国现实的关于内部控制理论和实务的探讨。这也反映了研究不仅要具有前沿性,更要有现实意义。 2.从论述内部控制的角度来看,总体上可以分为理论研究和应用研究。一般有以下几个角度的探讨:(1)内部控制的概念的探讨。(3)内部控制与公司治理的关系。(3)在应用研究方面,主要是内部控制制度的建设。由于关于内部控制的文章比较多,本文首先选择会计类国家级核心期刊《会计研究》上涉及内部控制的文章进行综述,还有一部分文章取自《会计之友》、《财会通讯》等会计类核心期刊。论述的方面也主要是按照上述(二)中的分类进行阐述。二、对国外内部控制的介绍和借鉴 由于美国具有较为成熟的资本市场和法律规范,所以在其资本市场上出现的问题以及所出台的解决措施也对我们有很有意义的指导作用,所以在我国文献方面介绍这部分的内容也较多。特别是SOX法案颁布以来,就有不少对其的介绍、研究的文章。比如,美国SOA404条款执行成本的研究,认为SOA404条款提高了通过证券市场募集资金的成本,董事会结构改变增加成本支出,运转效率下降, 影响公司竞争力。(黄京菁,2005)虽然他是对美国社会环境下,对SOA404的研究,但其中的思想对我国内部控制政策制订也有启发作用。COSO 报告下的内部控制新发展——从中航油事件看企业风险管理(李若山,徐明磊,2005)也是用美国关于内部控制理论、实务的最新发展来解释中航油内部控制失败的案例,还有伊利股份、创维数码、四川长虹等失败案例或重大事件,认真学习ERM框架中的所有内容,并将其与企业经济业务紧密结合起来,我们认为对我国企业内部控制制度的重新调整,有一定借鉴意义,也为我们在当前环境下如何建立起一套适合中国国情的内部控制措施,提供了一个新的理论基础。 另外,在《会计研究》期刊上,还有一些财政部以考察团形式对国外不同特点的国家内部控制进行考察、分析。不同国家国情,不同内部控制制度和实践也将给我国内部控制制度的建立给予启示。如:美国内部控制信息披露的发展及其借鉴,英国和法国企业内部控制考察报告,英美上市公司内控信息披露制度对我国的启示,美国会计国际趋同、注册会计师
仿生扑翼飞行机理的分析研究与技术发展
徐州工程学院学报2007年第4期膀各个部分的协调动作来产生有效的升力和前进力. 图1 鸟类内翼模型剖面图Fig.1Sectionplaneofinnerwingmodelofbirds 1.2昆虫飞行机理 昆虫的翅膀是类似的平面薄体结构,不能伸缩变形,不具滑翔能力,与鸟类的飞行相比有着本质的区别,只能通过高频振动和灵巧的扑翅运动产生足够升力.Wooton认为昆虫飞行能力和飞行技巧的多样性大半来自于翅型多样性和微妙复杂的翅运动模式[1].其翅膀在拍动过程中伴随着快速且多样性的运动,会产生不同于周围大气的局部不稳定气流,这种非定常空气动力学效应是研究和理解昆虫和小鸟飞行机理及其空气动力学特性进而实现仿生飞行的重要基础.随着对非定常流理论认识的加深,研究者们开始探讨非定常效应在昆虫飞行升力产生中发挥的重要作用,并采用非定常空气动力学理论解释昆虫飞行的机理. 分析表明,昆虫一个周期内的扑动大体可分解为四个阶段:翅膀在上扑至顶点时翅膀旋转、下扑、下扑至最低点时翅膀旋转、上扑,图2为蜂鸟悬停飞行时的扑翼轨迹.通过探索各个运动中所涉及到的空气动力学理论,可得到几种比较具有代表性的解释昆虫扑翼产生升力的机理. 图2蜂鸟扑翅过程 Fig.2Flappingprocessofwoodnymph 图3合拢与分开机制Fig.3Clap—Flingmechanism1.2.1合拢与分开(Clap--Fling) 1973年,Weis—Fogh通过观察小黄蜂生物资料,并在仔细研究了昆虫振翅飞行生物学资料的基础上,提出了拍飞(Clap--Fling)机理[2]. 拍飞机理可通过图3所示的模型来解释,两翅前缘在顶点处合拢,然后两翅逐渐旋转并从前缘处分开,这时两翅问夹角增大,空气流入两翅空隙中,随着两翅间夹角增大,空气流动使得翅周围形成两个旋转涡,翅表面很快形成环流.当两翅张开到一定角度时,两翅分开,各自平动,这时两翅表面各有一个边界涡,使得下拍开始时产生尽可能大的升力.该机理可以解释一部分小型昆虫产生大升力的原因,但不适用于所有昆虫,没能从根本上揭开昆虫高升力的奥秘,却促使人们真正开始用非定常效应来解释昆虫的飞行. 1.2.2延时失速(DelayedStall) 随着流体实验技术的完善,人们开始观察吊飞昆虫的翅尖轨迹及其翅膀周围的流场,发现在下拍过程中?28?
从结构仿生到生态仿生看仿生学的发展
从结构仿生到生态仿生看仿生学的发展林 雁 (南京师范大学附属实验学校 江苏 210046) 师法自然是中国古代有名的哲学思想,而今科学技术的发展更证明了这一点。1960年,美国科学家斯蒂尔经过长时间的观察研究,创立了仿生学(Bionics)。从此,生物体的精巧结构,成了工程学有意模仿的对象,工程师们向生物学习,创造出众多高性能的器件。进入21世纪,仿生学又朝着系统仿生的方向发展,为人类社会的可持续发展注入了新的活力。 科学家研究发现,生物器官结构之巧妙,能量的节省和工作性能之优越,是人造机器无法相比的。这表明由选择进化磨合积累的功能,最符合大自然的和谐原则与优化原则。 1 蛛丝及贝壳结构的启示 生物器官结构和性能的优越,同生物材料的组织生产方式密切相关。例如,人类生产的防弹纺织材料,要在高温高压的强酸中生成,条件极其苛刻。而一种金色球形网蜘蛛,却能在常温下以水为介质,抽出比人造防弹材料坚韧得多的蛛丝,而且能被生物降解。美国康奈而大学教授杰林斯领导的科学家小组,用核磁共振仪(N BR)拍了几百幅蜘蛛丝腺的照片,同光学显微镜切片进行对照研究,并把资料输入计算机,模拟出一只三维仿真蜘蛛。在电脑中对仿真蜘蛛解剖研究,发现蛛丝蛋白质多聚体从腺体产生后,必须经过一段十分复杂的管道,分子在其中重新排列组合,形成了特殊的三级结构,才有如此的韧性。 一只贝壳具有高级陶瓷的强度,把它从高处跌下一般不会粉碎,如用很大的外力将它搞破,裂口也不象陶瓷那样平展。把贝壳磨成极薄的片子在电子显微镜下观察,能见到贝壳是由一层叠一层的超薄碳酸钙晶片,与十亿分之一米直径的蛋白质分子粘合而成的。这种结构在受压时,碳酸钙晶片可以在蛋白质分子间滑动变形,能像金属一般有延展性,使贝壳具有最大的强度。科学家又研究了甲虫的甲壳,发现它的表皮是由埋在胶质中的蛋白质纤维组成,而且成对地呈螺旋组合重叠,都不对称,具有极大的抗冲击性。生物在组成材料时,是从原子排列成分子,由分子装配成纤维或晶体一类中间成分,再形成各种组织,每一步都有精确的基因控制程序,做到天衣无缝。而人在生产复杂材料时,只是由分子进行化学键的结合,与生物的组合相比,实在是太简单了。 科技人员模仿生物组织材料的方法,用双螺旋的不对称层叠排布石墨与环氧树指,生产出比传统碳纤维强度更好的机翼材料,生产出的机翼既轻、耐冲击又不容易变形,大大提高了飞机的性能。 2 DNA装配与分子机器 据推测,从30亿年前开始,生物就以DNA和RNA 核苷酸的多变排列,调控20种氨基酸原料合成各种蛋白质。从理论上讲,生物可以合成任意长度的蛋白质。但研究的结果表明,肽链误译率相当高。如果是由500个氨基酸组成的蛋白质。每4个这样的蛋白质分子就有一个是错误蛋白,这对于生命来讲是十分危险的。生物体一方面令错误的蛋白质报废,一方面对合成进行控制,使合成的肽链很短,再由多条链(亚基)组合成蛋白质。刚合成的蛋白质是线性的肽链,必须经过修饰程序的加工,折叠成具有多级结构、稳定功能的复合体。生物分子的自组装就是这样既保证了产品的特异性,又使产品维持一定的几何形状。生物学家还了解到,蛋白质分子是一种刚柔互补的分子,脯氨酸的存在增加了蛋白质的刚性,甘氨酸则使蛋白质具有柔性。蛋白质中还有一种异构酶,能根据其它蛋白质的存在而调整自己的结构,进而增强蛋白质的整体功能。 当今兴起的纳米技术,是一种制备纳米材料和纳米级微型机器技术,特别是纳米级组装能生产出提纯分子的纳米泵、分子大小的计算机等纳米器件是制造业的一次大革命。由于加工的部件是一些原子和分子,即使是用电子显微镜进行操作或用激光镊子技术,部件的捕捉与定位装配也是相当困难的。如果仿照细胞生物化学反应的过程来进行纳米级生产,就要容易得多,这就是分子制造领域里的仿生技术,一种高度自动化的按模板进行自组装的技术。模仿DNA指挥合成生物分子过程的纳米仿生,是一种刚提上研究日程的未来技术,即使与当今最先进的制造技术相比,也有很大的超前性,它代表了高新制造的发展方向。 3 梦圆伊甸园的生态仿生 人类的物质生产,从后工业时代到信息时代,创造了巨大的财富,但是这些物质生产均是以消耗地球资源为代价的。在生产过程中,人类只将很少一部分原材料变成产品,大部分原材料当作废物排到地球环境中。就拿新兴的信息产业来说,目前全世界的硅年产量为80万吨,其中仅有少部分变成超净的电子用硅,这其中又只有0.093%做成了芯片,0.4%变成光电池,大部分以废物的形式丢弃。在生产这些芯片中,消耗的30万吨以上的酸碱洗液,也作为废物排到了环境
扑翼原理
昆虫和鸟类的扑翼飞行机理 2007年7月19日- 工程流体网 昆虫是世界上出现最早的、数量最多的和体积最小的飞行者。目前,地球上的昆虫有75 万种之多,鸟类有8 千余种。这些动物的飞行特点和技巧各有不同,但无一例外地都采用了扑翼飞行方式。昆虫和鸟类的扑翼飞行方式运动复杂,其机理尚未被人们完全认识和掌握。动物翅膀运动的雷诺数(Re)都很小,一般在10~10,000 之间。 实验结果表明,在定常气流中的动物翅膀将不能产生足够的升力供昆虫和鸟类飞行之用。显然,动物是利用非定常气流来产生高升力的。长期以来,生物学家和工程学家对昆虫和鸟类产生高升力的机理十分感兴趣。近年来出现的微型飞行器(MA V,Micro Air/Aerial Vehicle)有力地推动了昆虫和鸟类飞行中的流体力学问题的研究。 当鸟类在空中展翅滑翔时,其飞行原理与已有的固定翼飞机的相同。除此之外,扑翼飞行方式的空气动力学特性要比常规的固定翼飞机的和直升机的复杂的多。通过高速摄像机的帮助,人们观察到鸟类和昆虫的翅膀在往复扇动和拍打过程中,除了单纯的扇动之外,还伴随有相应的扭曲变形和旋转等运动类型。人类尚未采用的这些运动类型对鸟类和昆虫产生升力和作机动飞行是举足轻重的。 为了揭示扑翼飞行奥妙,人们提出了非定常气流理论,希望能够解释翅膀扇动及转动产生升力的原因。理论和实验结果表明,目前非定常气流理论尚不能够对扑翼飞行机理做出全面的解释。 昆虫和鸟类靠拍动翅膀来飞行。翅膀近似在一个平面内拍动,该平面称为拍动平面。这与直升机桨叶的旋转平面是相似的。直升机的桨叶是绕固定方向旋转,而昆虫是作往复式旋转。动物翅膀的拍动范围是用拍动角来衡量的,大多数动物的翅膀拍动角约为120度。 当悬停飞行时,拍动平面几乎是水平的。当翅膀向前拍动时,翼弦与拍动平面有一定的夹角(即攻角),从而产生升力;当翅膀向后拍动时,翅膀翻转过来,原来向前拍动时的下翼面变成了向后拍动时的上翼面,同样具有一定的攻角并产生升力。一个拍动周期中的平均气动力是垂直向上的。当前飞或后飞时,昆虫的拍动平面是向前或向后倾斜的,这与直升机的情况相似。 悬停飞行时的拍动平面是水平的,平均气动力是垂直向上的。前飞时的拍动平面是向前倾斜的。由于拍动平面向前倾斜,悬停时的向前拍动变成了前飞时的向前下方拍动,悬停时的向后拍动变成了前飞时的向后上方拍动。习惯上,各种飞行姿态的向前的拍动统一称为下拍,反之向后的拍动称为上拍(或上挥);拍动平面内的运动称为“平动”(事实上是沿周向的往复运动),前后拍之间的翻转称为“转动”。 拍动中的“平动”可以分为三个部分:起始阶段的加速运动、中间阶段的等速运动和结束阶段的减速运动。拍动中的“转动”可以分为二个部分:下拍结束阶段与上挥起始阶段翅膀的向前转动,上挥结束阶段与下拍起始阶段翅膀的向后转动。拍动中的“转动”模式可以有三种:对称模式、超前模式和滞后模式。若转动的一半在上一个拍动的结束阶段完成,而另一半在下一个拍动的起始阶段完成,则称为“对称模式”;若将转动提前,转动的大部分在上一个拍动的结束阶段完成,而剩余的小部分在下一个拍动的起始阶段完成,则称为“超前模式”;若将转动推后,转动的小部分在上一个拍动的结束阶段完成,而其中的大部分在下一个拍动的起始阶段完成,则称为“滞后模式”。 昆虫和鸟类扑翼飞行的高升力机理研究与分析是基于某些昆虫和鸟类翅膀拍动的实验和理论计算得到的。不同的昆虫和鸟类,它们翼的形状、运动的雷诺数和拍动的频率可能不尽相同。只要扑翼运动的方式大致相同,则可以认为利用上述的机制和分