【CN109850144A】一种太阳能扑翼仿生飞行器【专利】
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910302505.6
(22)申请日 2019.04.16
(71)申请人 吉林大学
地址 130012 吉林省长春市前进大街2699
号
(72)发明人 张志君 陈默 杨贺捷 梁玉辉
辛相锦
(74)专利代理机构 长春吉大专利代理有限责任
公司 22201
代理人 邵铭康 朱世林
(51)Int.Cl.
B64C 33/00(2006.01)
B64C 33/02(2006.01)
B64D 27/24(2006.01)
(54)发明名称
一种太阳能扑翼仿生飞行器
(57)摘要
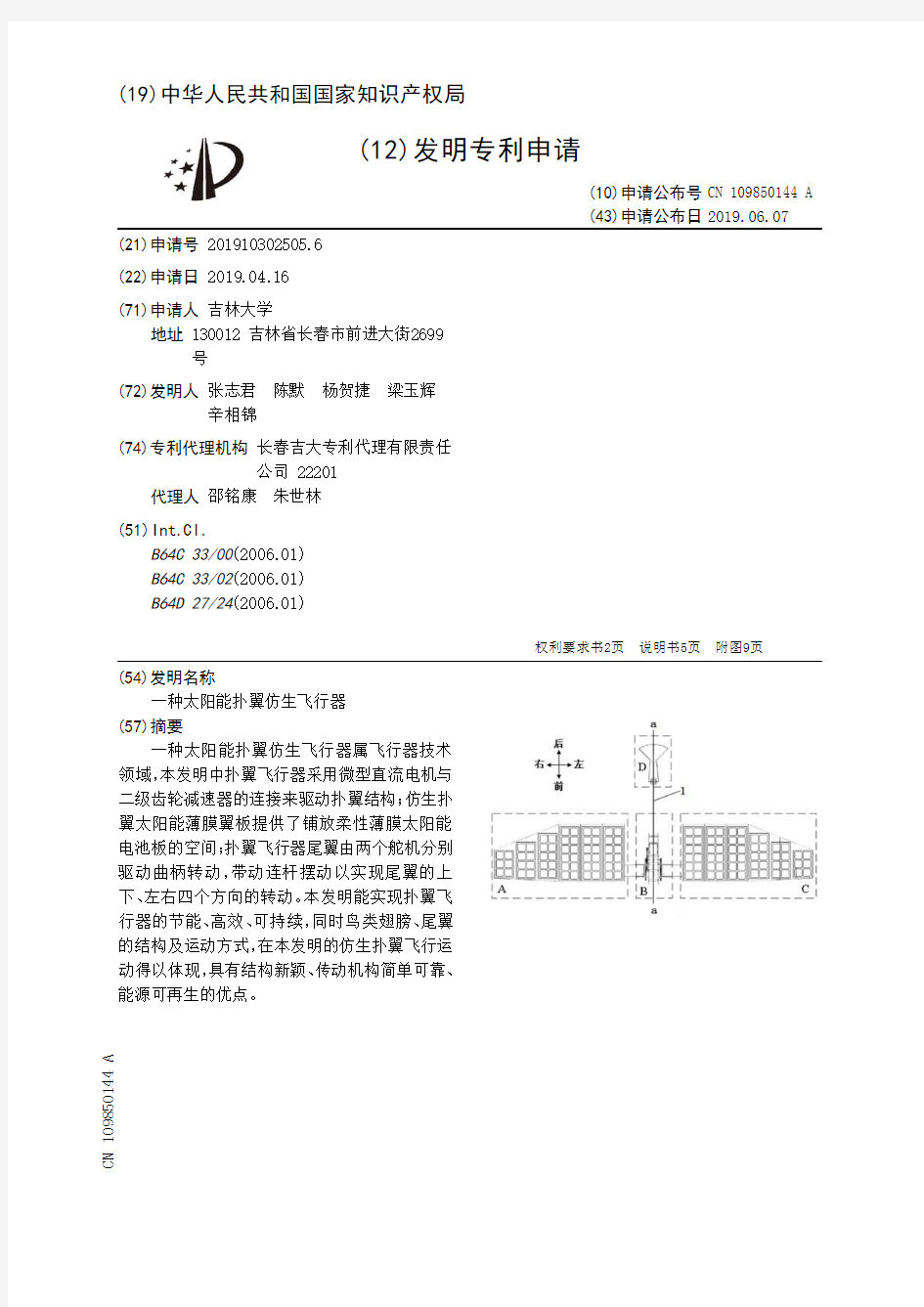
一种太阳能扑翼仿生飞行器属飞行器技术
领域,本发明中扑翼飞行器采用微型直流电机与
二级齿轮减速器的连接来驱动扑翼结构;仿生扑
翼太阳能薄膜翼板提供了铺放柔性薄膜太阳能
电池板的空间;扑翼飞行器尾翼由两个舵机分别
驱动曲柄转动,带动连杆摆动以实现尾翼的上
下、左右四个方向的转动。本发明能实现扑翼飞
行器的节能、高效、可持续,同时鸟类翅膀、尾翼
的结构及运动方式,在本发明的仿生扑翼飞行运
动得以体现,具有结构新颖、传动机构简单可靠、
能源可再生的优点。权利要求书2页 说明书5页 附图9页CN 109850144 A 2019.06.07
C N 109850144
A
权 利 要 求 书1/2页CN 109850144 A
1.一种太阳能扑翼仿生飞行器,其特征在于:由太阳能薄膜右翼板(A)、驱动-传动装置
(B)、太阳能薄膜左翼板(C)和仿生尾翼(D)组成,其中:所述的太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构;太阳能薄膜右翼板(A)中右连杆(2)的a孔(a)与驱动-传动装置(B)中限位杆对a(15)上的i孔(i)和摇臂a(12)上的n孔(n)活动连接;右连杆(2)的b孔(b)经螺栓与摇臂对a(12)上的m孔(m)固接;太阳能薄膜左翼板(C)中左连杆(3)的a1孔(a1)与驱动-传动装置(B)中限位杆对b(36)上的i1孔(i1)和摇臂对b(35)上的n1孔(n1)活动连接;左连杆(3)的b1孔(b1)经螺栓与摇臂对b(35)上的m1孔(m1)固接;仿生尾翼(D)铰接于机身(1)的后端;仿生尾翼(D)中机身(1)的q槽(q)、r槽(r)、s槽(s)经o孔(o)与驱动-传动装置(B)的固定架(20)固接;驱动-传动装置(B)的太阳能充电控制器(32)和蓄电池(33)与侧机架(18)固接;太阳能充电控制器(32)与太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)的太阳能电池板(4)电路连接,蓄电池(33)一端连接太阳能充电控制器(32),蓄电池(33)另一端连接驱动-传动装置(B)的无刷电机(7)。
2.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的太阳能薄膜右翼板(A)与太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构,其结构相同,方向相反,均由太阳能电池板(4)、翼板(5)、骨架(6)组成,其中骨架(6)上设有p孔(p);太阳能薄膜右翼板(A)上还设有右连杆(2),右连杆(2)左端设有a孔(a)和b孔(b);太阳能薄膜左翼板(C)上还设有左连杆(3),左连杆(3)右端设有a1孔(a1)和b1孔(b1);太阳能薄膜左翼板(C)的骨架(6)经p孔(p)与左连杆(3)固接,翼板(5)由骨架(6)支撑;太阳能电池板(4)粘接于翼板(5)上面;太阳能薄膜右翼板(A)的骨架经p孔与右连杆(2)固接,翼板由骨架支撑;太阳能电池板粘接于翼板上面。
3.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的驱动-传动装置(B)由无刷电机(7)、右机架(8)、一级小齿轮(9)、一级大齿轮(10)、二级小齿轮a(11)、摇臂对a(12)、轭a(13)、驱动杆对a(14)、限位杆对a(15)、二级大齿轮a(16)、螺栓组a(17)、侧机架(18)、二级小齿轮b(19)、固定架(20)、左机架(21)、一级轴(22)、二级轴(23)、二级大齿轮b(24)、轭b(34)、摇臂对b(35)、限位杆对b(36)、驱动杆b(37)和螺栓组b(38)组成,其中:右机架(8)与左机架(21)为关于机身a-a中轴线的对称结构;右机架(8)上设有c孔(c)、d孔(d)、e孔(e)、f孔(f)、g孔(g)和h孔(h);左机架(21)上设有c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)、g1孔(g1)和h1孔(h1);限位杆对a(15)上设有i孔(i);摇臂对a(12)上设有j孔(j)、k孔(k)、m孔(m)和n孔(n);限位杆对b(36)上设有i1孔(i1);摇臂对b(35)上设有j1孔(j1)、k1孔(k1)、m1孔(m1)和n1孔(n1);固定架(20)上设有o孔(o);右机架(8)与左机架(21)平行排列,并经侧机架(18)固接;无刷电机(7)经c孔(c)、d孔(d)、e孔(e)、f孔(f)与右机架(8)螺栓固接;无刷电机(7)经c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)与左机架(21)螺栓固接;一级小齿轮(9)固接于无刷电机(7)输出端;一级轴(22)与二级轴(23)平行排布;一级轴(22)上自右至左依次固接二级小齿轮a(11)、一级大齿轮(10)和二级小齿轮b(19),且一级轴(22)两端活动连接于右机架(8)的g孔(g)和左机架(21)的g1孔(g1)上;二级轴(23)上前后固定安装着二级大齿轮a(16)和二级大齿轮b(24),且二级轴(23)两端活动连接于右机架(8)的h孔(h)和左机架(21)的h1孔(h1)上;一级小齿轮(9)与一级大齿轮(10)啮合;二级小齿轮a(11)与二级大齿轮a(16)啮合;二级小齿轮b(19)与二级大齿轮b(24)啮合;限位杆对a(15)固接于右机架(8)右侧;摇臂对a(12)上的n孔(n)经销轴与连杆(1)的a孔(a)、限位
2
仿生机器人关键技术
仿生机器人关键技术 “仿生机器人”是指模仿生物、从事生物特点工作的机器人。,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。因此,机器人领域中需要研究的问题非常多。主要研究问题包括以下五个方面: 1 建模问题 仿生机器人的运动具有高度的灵活性和适应性。其一般都是冗余度或超冗余度机器人,结构复杂,运动学和动力学模型与常规机器人有很大差别,且复杂程度更大。为此,研究建模问题,实现机构的可控化是研究仿生机器人的关键问题之一。 2 控制优化问题 机器人的自由度越多,机构越复杂,必将导致控制系统的复杂化。复杂巨系统的实现不能全靠子系统的堆积,要做到整体大于组分之和,同时要研究高效优化的控制算法才能使系统具有实时处理能力。 3 信息融合问题 在仿生机器人的设计开发中,为实现对不同物体和未知环境的感知,都装备有一定量的传感器。多传感器的信息融合技术是实现其具有一定智能的关键。信息融合技术把分布在不同位置的多个同类或不同类的传感器所提供的局部环境的不完整信息加以综合,消除多传感器信息之间可能存在的冗余和矛盾,从而提高系统决策、规划、反应的快速性和正确性。 4 机构设计问题 合理的机构设计是仿生机器人实现的基础。生物的形态经过千百万年的进化,其结构特征极具合理性,而要用机械来完全仿制生物体几乎是不可能的,只有在充分研究生物肌体结构和运动特性的基础上提取其精髓进行简化,才能开发全方位关节机构和简单关节组成高灵活性的机器人机构。 5 微传感和微驱动问题 微型仿生机器人有些已不是传统常规机器人的按比例缩小,它的开发涉及到电磁、机械、热、光、化学、生物等多学科。对于微型仿生机器人的制造,需要解决一些工程上的问题,如动力源、驱动方式、传感集成控制以及同外界的通讯等。实现微传感和微驱动的一个关键技术是机电光一体结合的微加工技术。同时,在设计时必须考虑到尺寸效应、新材料、新、工艺等问题。
微型扑翼飞行器的现状及关键技术
无人机 本文2007-08-02收到, 作者分别系海军航空工程学院讲师、副教授和助教 图1 微型蝙蝠飞行器 微型扑翼飞行器的现状及关键技术 郭卫刚 贾忠湖 康小伟 摘 要 微型扑翼飞行器是高新技术的产物,是当前国内外研究的热点。简述了微型扑翼飞行器目前的发展现状,提出发展微型扑翼飞行器的几项关键技术,并对微型扑翼飞行器的发展趋势进行了展望。 关键词 扑翼机 微型飞行器 微机电系统(ME M S) MAV(M icro A ir Veh icle微型飞行器)由于具有特殊的用途(如侦察、电子干扰、搜寻、救援、生化探测等)而倍受关注。根据美国国防高级研究计划局(DARPA)提出的要求,微型飞行器的基本技术指标是:飞行器各个方向的最大尺寸不超过150mm,续航时间20m i n~60m in,航程达到10km以上,飞行速度22k m/h~45km/h,可以携带有效载荷,完成一定的任务[1]。 按飞行原理的不同,MAV分为固定翼、旋翼、扑翼三大类型。固定翼布局有许多问题亟待解决,如升阻比相对较小,在低雷诺数状态下机翼不能提供足够的升力,遭遇突风难以保持稳定等。旋翼布局尽管能够垂直起降和悬停,但其飞行速度低,质量大,仅适宜于在比较狭小的空间或复杂地形环境中使用。而综观生物的飞行,无一例外都是采用扑翼飞行方式。同常规布局相比,扑翼布局仅用一套扑翼系统就可代替螺旋桨或喷气发动机提供推力;扑翼可以使MAV像昆虫和鸟类那样低速飞行、盘旋、急转弯甚至倒飞;扑翼下面可以产生一种涡流,这是扑翼飞行器飞行的必要助推力,扑翼飞行器可以通过自身机翼扇动产生的上下大气压差来飞行。微型扑翼飞行器具有一般航空飞行器无法比拟的机动和气动性能,与无人侦察机相比,具有以下优势:可以低速飞行,可以随意改变方向,可以悬停,还可以向后倒退。 1 研究现状 在DARPA的资助下,微型扑翼飞行器的研究得到了很大进展,主要有加州理工学院与加利福尼亚洛杉矶大学共同研制的微型蝙蝠(M icrobat[2]),斯坦福研究中心和多伦多大学共同研制的引导者(M en-tor),乔治亚理工研究院及其协作者研制的昆虫机(Ento m opter)。 1.1 微型蝙蝠 微型蝙蝠是最早的电动扑翼飞行器,其机翼是采用微电机系统(ME MS)技术加工制作而成的。通过质量轻、摩擦低的传动机构将微电机的转动变为机翼的扑动。 加州理工学院在DARPA的倡议下依据仿生昆 19 飞航导弹 2007年第12期
仿生扑翼飞行器的发展与展望
仿生扑翼飞行器的发展与展望 摘要:本文简要介绍了仿生扑翼飞行器的概念、特点及其历史,概述了仿生扑翼飞行器在国内外早期和当前的研究现状及未来的发展趋势。在此基础上,就目前研究中迫切需要解决的一些关键技术进行了讨论,并结合目前研究情况,对我国仿生扑翼飞行器的未来发展前景进行了展望。 关键词仿生;扑翼飞行器;微型飞行器;关键技术 Abstract:The concept,characteristics and usage of flapping-wing air vehicle are briefly introduced.The present research situation and future development trend of FA V are summarized. According to these,several key technologies of FA V are discussed.Taking into account the present situation .the future on the research of FA V in China is outlined. Key words:Bionics ; Flapping-wing air vehicle ; Micro air vehicle ; Key technology 1仿生飞行的历史与进展 1.1向鸟类学习 在中国两千年以前的航空神话和传说中,就有“人要是长着翅膀,就能在空中飞行”、“人骑着某种神奇的动物,可以飞行”等反映古人飞行理想和愿望的文字记载。多数昆虫长着一左一右两个或4个翅膀,他们都是飞行家,飞行技术非常高明。但因为昆虫比较小,翅膀的运动速度太快,不易被观察,在古人眼里,只认为鸟类是可以模仿的、最好的飞行家。传说中春秋时代(公元前770-前481)后期,鲁国著名的能工巧匠公输盘(有些史籍也记作“公输班”)研究并花费3年时间制造了能飞的木鸟,又名木鸢。如图所示 1.2实现飞行 1783年,法国蒙哥尔费兄弟发明热气球并载人飞行,开始了人类真正的空中航行。在人类利用轻于空气的航空器获得成功的 同时,也对重于空气的航空器一飞机进行探索和试验。英国的乔治.凯利(Cayley G)率先提出利用固定机翼产生升力的概念,他把鸟的飞行原理从上升和推进两种功能区别 开来,设计制造了能载人的滑翔机。1903 年莱特兄弟在滑翔机基础上加装自制内燃 机制成的“飞行者”1号试飞成功,持续时间59秒,标志着动力飞机飞行成功,开辟了人类的飞行新纪元,人类翱翔蓝天的梦想 得以真正实现。 1.3微型飞行器 1992年,美国国防高级研究计划局召开了关于未来军事技术的研讨会,第一次提出了微型飞行器MAY(Micro Air Vehicle)的概念,并提出其量级与昆虫及小鸟相似。从现有的研究情况看,微型飞行器按其飞行方式可分为传统的固定翼布局、旋翼布局和仿生扑翼式布局3类。固定翼式和旋翼式微型飞行器的研究迄今为止都达到了相当的水平。2000年8月,“Black Widow”原型机经过不断改进后,留空时间达到30分钟,最大活动半径为1.8km,最大飞行高度约235m,飞行重量为80克。旋翼微型飞行器因能垂直起降和悬停,比较适宜于在室内等狭小空间或较复杂地形环境中使用。回顾人类飞行的历史,研究者们重新认识到,纵观自然界的飞行生物,无一例外均采用扑翼的飞行方式,扑翼飞行是生物进化的最优飞行方式。于是人们又开始着眼于扑翼飞行器的研究。微型扑翼飞行器的机动性、灵活性及低能耗等方面可与蜻蜓、蜜蜂、或蜂鸟等飞行生物相媲美。经过近20年来研究者们的共同努力,微型扑翼飞行器在仿生学飞行机理、能
微型飞行器空气动力学研究
2005年9月系统工程理论与实践第9期 文章编号:100026788(2005)0920137205 微型飞行器空气动力学研究 李占科,宋笔锋,张亚锋 (西北工业大学航空学院,陕西西安710072) 摘要: 围绕与微型飞行器相关的低雷诺数空气动力学问题,进行了低雷诺数翼型气动特性的数值分析 研究、低马赫数低雷诺数流场数值计算方法研究、考虑扑翼结构弹性变形的气动特性估算方法研究、微 型飞行器气动特性估算的非定常涡格法研究和微型飞行器的风洞试验研究,取得的研究成果对微型飞 行器的发展具有重要的参考价值和指导意义. 关键词: 微型飞行器;雷诺数;扑翼;风洞试验 中图分类号: V27912 文献标识码: A Aerodynamics Research on M icro Air Vehicles LI Zhan2ke,S ONG Bi2feng,ZHANG Y a2feng (School of Aeronautics,N orthwestern P olytechnical University,X i’an710072,China) Abstract: In the paper,Based on the low Reynolds number aerodynamics of the micro air vehicles(M AVs),s ome researches were done.such as aerodynamics characteristic numerical analysis research on the air foil at low Reynolds numbers,numerical calculation method of low Mach low Reynolds numbers fluid field,estimation method research on aerodynamic characteristic of the aeroelastic flapping wing,unsteady v ortex method of aerodynamics characteristic estimation and wind tunnel test of M AVs.The results of this paper have im portant reference value and instructive meaning to the development of M AVs. K ey w ords: micro air vehicles(M AVs);Reynolds number;flapping wing;wind tunnel test 1 引言 近年来,微型飞行器作为一种新型的航空飞行器,在国内外形成了新的研究热潮.低速和小尺寸共同决定了微型飞行器的飞行雷诺数很低(105左右),这远低于传统飞行器(包括普通的无人驾驶飞机)的飞行雷诺数范围(106~108以上).微型飞行器必须在低雷诺数条件下仍能保持良好的气动性能,而这方面的研究目前尚处在探索阶段.本文主要围绕与微型飞行器有关的低雷诺数空气动力学问题,进行了数值计算和风洞试验等方面的研究,取得了具有一定参考价值的研究成果. 2 微型飞行器空气动力学研究 211 低雷诺数翼型气动特性的数值分析研究 微型飞行器外形尺寸小,速度低,基于微型飞行器尺寸的雷诺数也比较小,粘性效应相对强烈,流动易分离,准确求解这种低雷诺数的流场对湍流模型乃至整个数学模型都是一个极大的挑战.本研究针对低雷诺数问题,利用求解雷诺平均的NS方程,数值模拟了绕翼型的低雷诺数流动,分析了与低雷诺数流动有关的不稳定性.研究表明,分离流动都是不稳定的,会产生周期性的脱出涡.结合绕翼型的低雷诺数流动,对采用的计算模型进行了以下研究: 1)FNS方程与T LNS方程数值准确性的对比研究 分别采用FNS方程和T LNS方程计算了在条件:Ma=012,雷诺数Re=110×105,攻角α=1°时绕 收稿日期:2003207207 资助项目:总装气动预研项目(413130401)及国防基础科研项目(J1500C001)联合资助 作者简介:李占科(1973-),男,陕西岐山人,西北工业大学飞机系博士,主要从事与微型飞行器有关的研究.
仿生机器人的研究现状及其发展方向
第36卷第6期 上海师范大学学报(自然科学版)Vol.36,No.6 2007年12月 Journal of Shanghai Nor mal University(Natural Sciences)2007,Dec. 仿生机器人的研究现状及其发展方向 王丽慧,周 华 (上海师范大学机械与电子工程学院,上海201418) 摘 要:随着机器人智能化技术的进步,机器人应用领域的拓展,仿生机器人的研究正在引起世界各国研究者的关注.主要对仿生机器人的国内外研究状况进行了综述并对其未来的发展趋势作了展望. 关键词:仿生机器人;研究现状;发展方向 中图分类号:TP24 文献标识码:A 文章编号:100025137(2007)0620058205 人们对机器人的幻想与追求已有3000多年的历史,人类希望制造一种像人一样的机器,以便代替人类完成各种工作.1959年,第一台工业机器人在美国诞生,近几十年,各种用途的机器人相继问世,使人类的许多梦想变成了现实.随着机器人工作环境和工作任务的复杂化,要求机器人具有更高的运动灵活性和在特殊未知环境的适应性,机器人简单的轮子和履带的移动机构已不能适应多变复杂的环境要求.在仿生技术、控制技术和制造技术不断发展的今天,仿人及仿生物机器人相继被研制出来,仿生机器人已经成为机器人家族中的重要成员. 1 仿生机器人的基本概念 仿生机器人就是模仿自然界中生物的外部形状、运动原理和行为方式的系统,能从事生物特点工作的机器人.仿生机器人的类型很多,主要为仿人、仿生物和生物机器人3大类.仿生机器人的主要特点:一是多为冗余自由度或超冗余自由度的机器人,机构复杂;二是其驱动方式有些不同于常规的关节型机器人,通常采用绳索、人造肌肉或形状记忆合金等驱动. 2 仿生机器人的国内外研究现状 2.1 水下仿生机器人 水下机器人由于其所处的特殊环境,在机构设计上比陆地机器人难度大.在水下深度控制、深水压力、线路绝缘处理及防漏、驱动原理、周围模糊环境的识别等诸多方面的设计均需考虑.以往的水下机器人采用的都是鱼雷状的外形,用涡轮机驱动,具有坚硬的外壳以抵抗水压.由于传统的操纵与推进装置的体积大、重量大、效率低、噪音大和机动性差等问题一直限制了微小型无人水下探测器和自主式水下机器人的发展.鱼类在水下的行进速度很快,金枪鱼速度可达105k m/h,而人类最快的潜艇速度只有84km/h.所以鱼的综合能力是人类目前所使用的传统推进和控制装置所无法比拟的,鱼类的推进方式已成为人们研制新型高速、低噪音、机动灵活的柔体潜水器模仿的对象.仿鱼推进器效率可达到70%~ 收稿日期:2007209222 基金项目:上海师范大学理工科校级项目(SK200733). 作者简介:王丽慧(1972-),女,上海师范大学机械与电子工程学院副教授.
微型扑翼飞行器机翼气动特性研究
微型扑翼飞行器机翼气动特性研究⒇ 杨淑利,宋文萍,宋笔锋,邵立民 (西北工业大学航空学院翼型叶栅空气动力学国防科技重点实验室,陕西西安 710072) 摘 要:依据微型扑翼飞行器产生升力和推力的机理,设计了一套能够快速、有效求得扑翼飞行器机翼气动特性的计算方法。计算程序通过Visual Basic和Fo rtra n语言混合编程来实现,核心部分是利用改进的片条理论方法估算扑翼机翼的气动性能。计算结果与在西北工业大学微型飞行器专用风洞中所进行的吹风试验结果吻合良好,证明了该方法的正确性和有效性。在此基础上,研究了不同机翼平面形状、不同展弦比、不同上下扑时间比对微型扑翼飞行器机翼气动性能的影响,这些参数对微型飞行器的设计有一定的指导和参考意义。 关 键 词:微型扑翼飞行器,片条理论,机翼,风洞试验 中图分类号:V211.3 文献标识码:A 文章编号:1000-2758(2006)06-0768-06 于20世纪90年代提出的微型扑翼飞行器通过机翼扑动不仅可以产生升力,还可以产生维持扑翼飞行的推力,取代了用螺旋桨或喷气式发动机作为推进器,因此气动效率较固定翼飞行器高出很多[1]。 在研制微型扑翼飞行器时,为了能快速、有效地估算机翼气动特性,本文发展了一套基于改进的片条理论[2]的扑翼气动力计算方法,计算程序是通过Visual Basic和Fo rtra n语言混合编程实现的。计算方法在应用片条理论的基础上,还综合考虑了结构弹性、涡尾迹、失速、翼剖面平均迎角和摩擦阻力等因素的影响。 采用本文方法能够求解扑翼机翼的平均升力、推力、输入和输出功率及推进效率等。所得计算结果和风洞吹风试验结果吻合良好,证明了本文方法的正确性和有效性。另外,本文还研究了机翼平面形状、展弦比、上下扑时间比对机翼气动特性的影响,这些参数对微型飞行器的设计有一定指导和参考意义。 1 机翼气动特性计算方法简述 应用改进的片条理论计算机翼的气动参数,首先,沿展向方向将机翼分成2n个翼剖面,在机翼扑动运动中的每一时刻,求出每个翼剖面的升力和推力,然后叠加得到整个机翼的瞬时升力和推力。 图1显示了第i个翼剖面所受的力和力矩示意图。机翼扑动轴为左右机翼对称轴,弹性轴为机翼的前梁,机翼随前梁的弯曲而弯曲,随其扭转而扭转。第i个翼剖面的弯曲和扭转用h i和θi表示。h i垂直于扑动轴,表示第i个翼剖面的位移;θi位于h i和扑动轴所组成的平面内,表示第i个翼剖面弦向与来流方向的夹角。首先要求得h i和θi运动参数,进而求得i段机翼的气动参数 。 图1 第i个翼剖面的力和力矩示意图 由图1可知 h i=(h0)i+h~i 2006年12月第24卷第6期 西北工业大学学报 J o urnal o f N o rthw estern Po ly technica l U niv er sity Dec.2006 V o l.24N o.6 ⒇收稿日期:2006-02-21 作者简介:杨淑利(1982-),女,西北工业大学硕士生,主要从事微型飞行器的研究。
仿生扑翼飞行器设计与制作
仿生扑翼飞行器设计与制作 摘要:随着仿生学的发展和材料动力技术的不断进步,人类能更好的模仿生物的运动,向大自然学习,服务人类。像鸟一样的飞行是人类几千年的梦想,近几年科研人员在扑翼飞行器的研究和制造方面有了很大的发展,目前世界上已经出现了许多扑翼飞行器,但其仿生程度任然较低。通过学习和研究我们选用了对称的五杆机构来实现飞行器的机翼的动作,并按照飞行原理设计了飞行器的升力机构和推力机构,最后做出了实物,进行了飞行试验。 关键词:仿生;扑翼飞行器;五杆机构;空气动力学;飞行试验 Designing and producting of the flapping wing flight vehicle in bionics ABSTRACT: Along with the development of bionics and material power technology advances, mankind can better imitate biological movement, learning to nature and servicing human. Flying Like a bird is the dream of human for several thousand years, In recent years researchers Made great progress in the flapping wing flight vehicle research and manufacturing. There are already some kind of the flapping wing flight vehicles in the word recently, but the bionic degree lower still. With the studying and researching we choose the symmetrical five-bar mechanism to realize the action of the wing of the aircraft, According to the principle of fly. I design the lift institutions and thrust institutions. Finally I made the craft, and test it. KEY WORDS:Bionic; The flapping wing flight vehicle; Five-bar mechanism; Aerodynamics; Flight test
微型飞行器
图1:微型飞行器图2:微型直升机
命题教师:1.出题用小四号、宋体输入打印, 纸张大小为8K. 考 生:1.不得用红色笔,铅笔答题,不得在试题纸外的其他纸张上答题,否则试卷无效。2.参加同卷考试的学生必须在“备注”栏中填写“同卷”字样。3.考试作弊者,给予留校察看处分;叫他人代考或代他 人考试者,双方均给予开除学籍处理。并取消授予学士学位资格,该科成绩以零分记。 监测化学、核或生物武器,侦察建筑物内部情况。可适用于城市、丛林等多种战争环境。因为其便于携带,操作简单,安全性好的优点,可以在部队中大量装备。在非军事领域,配置有相应传感器的微型飞行器可以用来搜寻灾难幸存者、有毒气体或化学物质源,消灭农作物害虫等。 1.4主要特点 微型飞行器不同于传统概念上的飞机,它是MEMS (微机电系统)集成技术的产物。微型飞行器的姿态控制系统中的微型地平仪、微型高度计,导航系统中的微型磁场传感器和微型加速度计、微陀螺仪等,飞行控制系统中的微型空速计、微型舵机等,在微型飞行器上应用的微型摄像机、微型通讯系统等,都需要MEMS 技术的支持,以减少体积和重量,改善飞行器的性能。微型飞行器的动力——微型发动机也需利用MEMS 技术制造,所以说,微型飞行器除机身和机翼外,都需依靠MEMS 技术,甚至机翼也可以用MEMS 技术制造灵巧蒙皮,以控制飞行器的飞行姿态。 2 研究现状 从已有的研究情况看,大致可将微型飞行器分为两类:一类是以DARPA 定义为基础相应研制的15厘米左右的微型飞行器;另一类是尺寸更加微小的只有几个厘米或毫米大小的微型飞行器或微型飞行机器人。 根据发展情况,微型飞机主要有三大类别,分别是固定翼微型飞行器,微小扑翼机和微型直升机,以下列举几种: (1) Aero Vironment 公司的“Black Widow ” 该微型飞行器采用固定翼飞行模式,外形类似于盘装飞碟。最大直径15厘米,由微电机驱动前置螺旋桨产生拉力,采用锂电池提供能源,微型飞控系统由计算机、无线接收器和三个微电机驱动的执行器组成。经试飞其留空时间为16分钟,最大飞行速度70公里/小时。设计人员目前正在为其添加必要的通信系统和导航设备,以使其更加具备实用要求。“Black Widow ”代表了目前为飞行器的较高技术水平。 (2) Lockheed Martin 公司的“MicroST AR ” “MicroST AR ”也是一种采用固定翼飞行模式的微型飞行器,他的设计总重为85克,留空时间20分钟,未来将具备GPS 导航定位系统和摄像功能。Lockheed Martin 公司计划将“MicroST AR ”设计成为战场上前所未有的高效侦察工具。 图3: “Black Widow ”微型飞行器 图4:“MicroST AR ”微型飞行器 (3) Lutronix 公司与Auburn 大学合作研制的“Kolibri ” 该微型飞行器是一种旋翼飞机,能够垂直起降和悬停,其直径为10厘米,总重316克,有效负载约100克,可飞行时间30分钟,装有Draper 实验室研制的GPS 、加速度计和陀螺仪集成系统等,动力装置为D-STAR 公司提供的微型柴油发动机。旋翼微型飞行器与固定翼微型飞行器相比的最大优点是能够垂直起降和悬停,因此比较适宜于在室内等狭小空间或较复杂地形环境中使用。 (4) Caltech 的扑翼“MicroBat ” “MicroBat ”是一种防生物飞行方式的扑翼微型飞行器,其机翼是通过模仿蝙蝠和昆虫的翅膀,并用MEMS 技术加工制作而成。该微型飞行器的研究人员通过大量实验研究了扑翼飞行方式的非定常空气动力学特征,并制作了一种轻型传动机构将微电机的转动转变为了机翼的扇动。飞行试验表明该微型飞行器目前使用电池作为能源可飞行5-20秒。 图4:“Kolibri ”微型飞行器 图5: “MicroBat ”微型飞行器 (5) 美国环境航空公司研制的“黑寡妇”微型飞机
扑翼式飞行器的发展与展望
扑翼式飞行器的发展与展望 从古至今,人们从没有放弃过对翱翔梦的追求。不仅在许多的古书名著中都有长着翅膀的角色形象,人们也一直在用实际行动尝试着各种飞行的可能。昆虫和鸟类的超强飞行能力逐渐引起了人们的关注,早在中国的汉代时期、欧洲的中世纪就有人模拟鸟类进行飞行活动的记载。随着科技的快速发展,以及飞行器在军事上和民用上的广泛应用前景,扑翼式飞行器已经成为当今的研究热点。 1扑翼式飞行器的发展史 1.1 扑翼式飞行器的早期发展 历史上记载了许多人们对飞行的各种尝试方法,《墨子?鲁问》中记载,鲁班制造的木鸟可以飞行三天;古代中国甚至有人将大鸟的羽毛贴在身上试图飞起来,但最终都失败了。人们逐渐认识到想要飞行必须加上合适的机械装置。 15世纪70年代,著名发明家莱昂纳多?达芬奇设计出一种由飞行员自己提供动力的飞行器,并称之为“扑翼飞机”。“扑翼飞机”模仿鸟儿、蝙蝠和恐龙时代的翼龙,具有多个翅膀。达芬奇认为扑翼机具备推力和提升力。之后人们仿照它进行了很多尝试,有的可以上下蹦跳几下,有的摔成碎片,结果都失败了。 1874年,法国生物学家马雷用连续拍摄的方式初步掌握了鸟类复杂的飞行扑翼动作,以当时的技术水平,这种高难度的动作是无法实现的,与此同时热气球的出现,就使早起人们对制造飞行器尝试告一段落,研究开始转向了其他领域。 1.2扑翼式飞行器国内外的研究现状 随着仿生技术、空气动力学和微加工技术的日益发展,加之军事和民用的广泛应用前景,扑翼式飞行器再次成为了国内外科学领域研究的热点。1997年,DAPRA投入3500万美元,开始了为期四年的MAV的研究计划。加州理工学院、多伦多大学、佐治亚技术研究所、佛罗里达大学、Vanderbilt大学等单位研制了不同结构的扑翼MAV,翼展一般在15cm左右,多采用电池提供能源,飞行时间约在几分钟到十几分钟。加州大学伯克利分校研制的“机器苍蝇”扑翼MAV 总重约为43mg,直径为5mm~10mm,采用太阳能电池和压电驱动。 西北工业大学研制的扑翼MAV采用聚合物锂电池和微型电机驱动,可实现扑翼15Hz~20Hz左右的频率上下拍动,翼展超过15cm。 2扑翼式飞行器的优势及可行性 按照飞行原理的不同划分,MAV可分为固定翼、旋翼和扑翼三种。同其他形式的微型飞行器相比,扑翼式飞行器可以通过自身机翼扇动产生的上下大气压差来飞行。它具有尺寸小、噪音弱、灵活性强、隐蔽性好的特点。 通过分析昆虫各个部分的结构,选用合理的驱动装置,并由电池或其他化学物质提供能源,仿照昆虫结构,同时辅以MEMS设备和装配技术,便可以加工制造出扑翼式微型飞行器。 3关键技术 3.1 空气动力学问题 微型飞行器不同于普通飞机,它的雷诺数大约在104左右,空气的粘性阻力相对比较大,并且扑翼式飞行器是以模仿鸟和昆虫类扑翅运动为基础,但是昆虫和鸟类的翅膀是平面薄体结构,而非机翼的流线型。我们应充分研究这种非传统
超小型仿生扑翼飞行器扑翼结构有限元分析
目录 摘要 (1) ABSTRACT (2) 0 引言 (4) 1 国内外仿生扑翼飞行器研究的发展综述 (6) 1.1 国外研究的现状 (6) 1.2 国内研究的现状 (10) 1.3 课题研究的主要内容 (11) 2 超小型仿生扑翼飞行器扑翼有限元模型的建立 (11) 2.1 有限元分析的概述 (11) 2.1.1 有限元分析的原理 (11) 2.1.2弹性力学基础 (14) 2.2 ANSYS软件的介绍 (21) 2.2.1 前处理模块PREP7 (22) 2.2.2 求解模块SOLUTION (23) 2.2.3 后处理模块POST1和POST26 (24) 2.3 扑翼有限元模型的建立 (24) 2.3.1 超小型仿生扑翼飞行器扑翼几何物理模型的建立 (25) 2.3.2 单元类型的选择 (28) 2.3.3 单元特性的定义 (30) 2.3.4 有限元网格划分 (31)
2.4 本章小结 (32) 3 超小型仿生扑翼飞行器扑翼的静态力学特性讨论 (33) 3.1 超小型仿生扑翼飞行器扑翼的结构线性静力学分析 (33) 3.2 超小型仿生扑翼飞行器扑翼的结构非线性静力学分析 (37) 3.3 初探材料特性对仿生扑翼刚度等性能的影响 (40) 3.4 本章小结 (45) 4 结论 (45) 参考文献 (47) 译文 (50) 原文说明 (60)
摘要 超小型仿生扑翼飞行器是一种模仿鸟类或昆虫飞行的新概念飞行器,在应用技术上超出了传统的飞机设计和气动力的研究范畴,同时开创了微机电系统技术(MEMS)在航空领域的应用。设计和制造具有良好动力学特性的高效仿生扑翼,是超小型仿生扑翼飞行器研究中的一个关键环节,同时也是目前非常富有挑战性的研究难题。 本文利用有限元的基础理论,对仿照蜻蜓翅翼,设计的仿生扑翼进行结构静力学等内容的分析,研究了超小型仿生扑翼飞行器扑翼的结构特性等。文中的建模、分析方法及所得结论,为超小型仿生扑翼飞行器扑翼的设计、制作和应用提供了一定的理论依据。 本文基于蜻蜓真实的翅翼样本,利用ANSYS10.0软件,分别建立了仿生扑翼1和仿生扑翼2的几何结构模型,并通过选择适当的单元类型及设定特性参数,完成三维仿生扑翼1和仿生扑翼2的有限元模型。在此基础上,对超小型仿生扑翼飞行器扑翼进行静态特性分析,分别对仿生扑翼1和仿生扑翼2进行线性和非线性力学分析,比较两种情况下结构的变形及应力等静态性能,并初步探讨了改变材料特性对仿生扑翼刚度变形的影响,总结出仿生扑翼的几何外形和结构布局以及材料都会对扑翼的刚性产生一定的影响。 关键词:超小型飞行器,仿生扑翼,有限元分析
仿生机器人论文
目录 摘要 (2) 1 目前仿生机器人的发展状况 (2) 2 预测未来仿生机器人的发展 (2) 2.1 群体型机器人 (2) 2.2 多环境适应型机器人 (3) 2.3 学习型机器人 (3) 3 结语 (3) 参考文献 (4)
论仿生机器人未来的几种可能发展 摘要:自然界在长期的演化中孕育出了各种各样的生物,而这些生物都具有神奇的结构和功能,能够在复杂多变的环境中生存下去,因此,通过研究,学习,模仿来复制和再造某些生物特性和功能将极大的提高人类对自然的适应和改造能力。从20世纪60年代开始仿生学诞生,到现在短短的几十年时间,在这方面的研究成果已经非常可观,大到军事小到日常生活,我们已经可以处处见其身影了。那么未来的仿生机器人又会往什么方向发展呢?该文将对未来仿生机器人的几种可能的发展趋势,包含群体型机器人,多环境适应型机器人以及学习型机器人进行分析。 关键词:群体型机器人多环境适应型机器人学习型机器人 1 目前仿生机器人的发展状况 仿生学发展到现在已经延伸到很多领域,机器人学就是其主要的结合和应用领域之一。仿生学在机器人上的应用可以分为五个方面,它们分别是:结构仿生,材料仿生,功能仿生,控制仿生以及群体仿生。而且目前世界上的仿生机器人已经涉及海陆空各个领域,并且在各个领域上的发展都已经达到盛况空前地步。而在仿人机器人方面也在不断的突破中。 但是,目前的仿生机器人大多都是独立的一个个体,也就是彼此之间并没有什么联系。然而就目前的机器人技术水平而言,单机器人在信息的获取,处理以及控制能力等方面都是有限的,对于复杂的工作任务及多变的工作环境,单机器人更显不足。所以,当前的仿生机器人虽然已经发展到一定的高度,可是,它们本身还是存在不少的局限性的。 为了改善日前机器人存在的不足,新的技术手段已经成为了一种必须。在未来的日子里,新型机器人的性能将大幅度的提高,它们将会一步步的取代现有的机器人。 2 预测未来仿生机器人的发展 2.1 群体型机器人 在自然界中有着众多不是独立生存的生物,他们靠着一门属于自己的社交语言和其他的个体组成一个集体一起生活,并借着集体的力量去完成个体很难或者无法办到的事情,比如生活中常见的蚂蚁和蜜蜂,它们的强大我们都是已经有着切身体会的了。所以,如果我们能够借鉴生物间的这种生存方式去制造群体型的机器人,那么,在机器人这条道路上我们将会有一个质的飞跃,看到另一片新的天地。 那么群体型机器人比单个机器人的优势体现在哪里呢?首先,由于群体机器人彼此之间会有信息的交流和互动,那么,单个个体的结构和性能复杂程度将会得到大大的降低,因为它们可以通过群体的协调来弥补掉这些不足。其次,群体型机器人在执行任务的时候完成任务的概率要比单个机器人大很多,同时还能够减少完成任务的时间,提高任务的效率,这些,都是我们一直以来所要追求的。再者,群体型机器人通过彼此之间的联系,可以达到预测未知状况的目的,这样的一种能力对于完成任务来说有着举足轻重的作用。所以,群体型机器人在未来的机器人发展中是一种必然的趋势。
载人扑翼飞行器研制的可行性报告
载人扑翼飞行器研制的可行性报告 摘要:北京二环到五环频频全线拥堵,上海高峰时段驾车出行举步维艰,深圳交通遭遇黑色周一,道路堵塞已成常态,十五个大城市每日因拥堵蒙受损失十几亿元,拥堵已成为各大城市的流行病,2010年中秋前夜的一场秋雨,北京上海各地出现创纪录大堵车,北京一地160条道路堵塞,济南,成都,长沙也显拥堵现象,交通拥堵已向二三线城市蔓延。随着中国经济社会的高速发展,人民生活水平的快速提高,机动车保有量以及增长速度屡创新高。据调查,现在每增加100万辆车,北京需要增加的公路里程数至少应该达到2800公里,这一数字相当于三环以内已经有的公路网络的容量,因此,很难在道路上面再去拓展,再去增加。各种治堵方案层出不穷,但至目前为止,作用有限,效果不尽人意。故而,对于人们日常出行,如果思考角度从地面二维空间向低空三维空间转变,鉴于三维空间的无限性,通过一种合适的方式和手段,必能解决现有的各种出项困局。 扑翼飞行器是人类最古老的梦想之一,就是能够肩插双翅像鸟一样在天空自由飞翔。与传统的固定翼和旋翼飞行器相比,扑翼飞行器的主要特点是,将升力、悬停、推进、控制功能全面集成于扑翼系统中,可以用很少的能量进行远距离飞行,同时具有高效率、高机动性、低噪音、无须专用起飞着陆场地等。 载人的大致上可以分为两类:一类是手动的,就是动力来源于手臂扑扇;一类是引擎作为动力来源的。在1894年左右,一个叫做奥多Otto Lilienthal的家伙在德国变得非常出名,主要是他几次公开的滑翔飞行,而且都成功了。同时这位老兄也对扑翼飞机进行了数次的实验。最后他还建造了这样的一架飞行器,可惜这位老兄走的太早,这项工程就没有完成。 最近的(意思就是中间的我就不搞文字工作了)在2010.8.2号,多伦多航空学院的一个哥们叫做todd reichert,试飞了一架人力的扑翼飞机,这飞机有个好名字叫做雪鸟。这架翼展达32M重约92.59磅的大家伙使用碳纤维、玻萨轻木、泡沫制作而成的;这个飞机可以飞15.91英里每小时。 2,空气动力学原理 如果你想深入的了解扑翼飞机,编者的建议是去英文网页搜索,那里有很多注释。
【CN109850144A】一种太阳能扑翼仿生飞行器【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910302505.6 (22)申请日 2019.04.16 (71)申请人 吉林大学 地址 130012 吉林省长春市前进大街2699 号 (72)发明人 张志君 陈默 杨贺捷 梁玉辉 辛相锦 (74)专利代理机构 长春吉大专利代理有限责任 公司 22201 代理人 邵铭康 朱世林 (51)Int.Cl. B64C 33/00(2006.01) B64C 33/02(2006.01) B64D 27/24(2006.01) (54)发明名称 一种太阳能扑翼仿生飞行器 (57)摘要 一种太阳能扑翼仿生飞行器属飞行器技术 领域,本发明中扑翼飞行器采用微型直流电机与 二级齿轮减速器的连接来驱动扑翼结构;仿生扑 翼太阳能薄膜翼板提供了铺放柔性薄膜太阳能 电池板的空间;扑翼飞行器尾翼由两个舵机分别 驱动曲柄转动,带动连杆摆动以实现尾翼的上 下、左右四个方向的转动。本发明能实现扑翼飞 行器的节能、高效、可持续,同时鸟类翅膀、尾翼 的结构及运动方式,在本发明的仿生扑翼飞行运 动得以体现,具有结构新颖、传动机构简单可靠、 能源可再生的优点。权利要求书2页 说明书5页 附图9页CN 109850144 A 2019.06.07 C N 109850144 A
权 利 要 求 书1/2页CN 109850144 A 1.一种太阳能扑翼仿生飞行器,其特征在于:由太阳能薄膜右翼板(A)、驱动-传动装置 (B)、太阳能薄膜左翼板(C)和仿生尾翼(D)组成,其中:所述的太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构;太阳能薄膜右翼板(A)中右连杆(2)的a孔(a)与驱动-传动装置(B)中限位杆对a(15)上的i孔(i)和摇臂a(12)上的n孔(n)活动连接;右连杆(2)的b孔(b)经螺栓与摇臂对a(12)上的m孔(m)固接;太阳能薄膜左翼板(C)中左连杆(3)的a1孔(a1)与驱动-传动装置(B)中限位杆对b(36)上的i1孔(i1)和摇臂对b(35)上的n1孔(n1)活动连接;左连杆(3)的b1孔(b1)经螺栓与摇臂对b(35)上的m1孔(m1)固接;仿生尾翼(D)铰接于机身(1)的后端;仿生尾翼(D)中机身(1)的q槽(q)、r槽(r)、s槽(s)经o孔(o)与驱动-传动装置(B)的固定架(20)固接;驱动-传动装置(B)的太阳能充电控制器(32)和蓄电池(33)与侧机架(18)固接;太阳能充电控制器(32)与太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)的太阳能电池板(4)电路连接,蓄电池(33)一端连接太阳能充电控制器(32),蓄电池(33)另一端连接驱动-传动装置(B)的无刷电机(7)。 2.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的太阳能薄膜右翼板(A)与太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构,其结构相同,方向相反,均由太阳能电池板(4)、翼板(5)、骨架(6)组成,其中骨架(6)上设有p孔(p);太阳能薄膜右翼板(A)上还设有右连杆(2),右连杆(2)左端设有a孔(a)和b孔(b);太阳能薄膜左翼板(C)上还设有左连杆(3),左连杆(3)右端设有a1孔(a1)和b1孔(b1);太阳能薄膜左翼板(C)的骨架(6)经p孔(p)与左连杆(3)固接,翼板(5)由骨架(6)支撑;太阳能电池板(4)粘接于翼板(5)上面;太阳能薄膜右翼板(A)的骨架经p孔与右连杆(2)固接,翼板由骨架支撑;太阳能电池板粘接于翼板上面。 3.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的驱动-传动装置(B)由无刷电机(7)、右机架(8)、一级小齿轮(9)、一级大齿轮(10)、二级小齿轮a(11)、摇臂对a(12)、轭a(13)、驱动杆对a(14)、限位杆对a(15)、二级大齿轮a(16)、螺栓组a(17)、侧机架(18)、二级小齿轮b(19)、固定架(20)、左机架(21)、一级轴(22)、二级轴(23)、二级大齿轮b(24)、轭b(34)、摇臂对b(35)、限位杆对b(36)、驱动杆b(37)和螺栓组b(38)组成,其中:右机架(8)与左机架(21)为关于机身a-a中轴线的对称结构;右机架(8)上设有c孔(c)、d孔(d)、e孔(e)、f孔(f)、g孔(g)和h孔(h);左机架(21)上设有c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)、g1孔(g1)和h1孔(h1);限位杆对a(15)上设有i孔(i);摇臂对a(12)上设有j孔(j)、k孔(k)、m孔(m)和n孔(n);限位杆对b(36)上设有i1孔(i1);摇臂对b(35)上设有j1孔(j1)、k1孔(k1)、m1孔(m1)和n1孔(n1);固定架(20)上设有o孔(o);右机架(8)与左机架(21)平行排列,并经侧机架(18)固接;无刷电机(7)经c孔(c)、d孔(d)、e孔(e)、f孔(f)与右机架(8)螺栓固接;无刷电机(7)经c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)与左机架(21)螺栓固接;一级小齿轮(9)固接于无刷电机(7)输出端;一级轴(22)与二级轴(23)平行排布;一级轴(22)上自右至左依次固接二级小齿轮a(11)、一级大齿轮(10)和二级小齿轮b(19),且一级轴(22)两端活动连接于右机架(8)的g孔(g)和左机架(21)的g1孔(g1)上;二级轴(23)上前后固定安装着二级大齿轮a(16)和二级大齿轮b(24),且二级轴(23)两端活动连接于右机架(8)的h孔(h)和左机架(21)的h1孔(h1)上;一级小齿轮(9)与一级大齿轮(10)啮合;二级小齿轮a(11)与二级大齿轮a(16)啮合;二级小齿轮b(19)与二级大齿轮b(24)啮合;限位杆对a(15)固接于右机架(8)右侧;摇臂对a(12)上的n孔(n)经销轴与连杆(1)的a孔(a)、限位 2
免费飞机设计:MAV微型飞行器研究进展与总体设计
第30卷 11邹 辉 等:高超声速湍流高效模拟算法第30卷 第6期2010年 12月飞 机 设 计 AIRCRAFT DESIGN V ol. 30 No. 6 Dec 2010文章编号:1673-4599(2010)06-0011-06 MAV微型飞行器研究进展与总体设计 孙 瑜,张 杰,刘 虎,武 哲 (北京航空航天大学 航空科学与工程学院,北京 100191) 摘 要:系统地介绍了微型飞行器的定义、类型、任务和国内外发展现状,提出了现在微型飞行器设计的技术难点,即在气动力计算时,经典的空气动力学不再适用以及缺乏小展弦比机翼在低雷诺数下飞行的试验数据,针对这一难点提出了一套系统的设计方案,分为3个部分,分别是气动力建模、多学科优化和仿真与试验。在气动力建模中采用试验与数值计算相结合的设计方法,在基础试验数据的粗略估算后进行CFD计算达到准确设计的效果。在多学科优化中重点对续航能力进行了优化。最后通过比较仿真的结果和原型机飞行试验的数据对设计进行了验证和反馈。此套设计方法适用于大多数微型飞行器的设计。关键词:微型飞行器;研究进展;总体设计中图分类号:V221 文献标识码:A Research Status and Conceptual Design of Micro Air Vehicle SUN Yu , ZHANG Jie , LIU Hu , WU Zhe ( School of Aeronautic Science and Technology, Beijing University of Aeronautics and Astronautics , Beijing 100191, China ) Abstract : The de ? nition, classi ? cation and function of the Micro Air Vehicle (MA V) are introduced as well as its developing status in the world. The technical dif ? culty of MA V design is put forward, that is the classic aerodynamics is no longer applicable under a serious influence of low Reynolds numbers, and flight test data of low aspect ratio wing is lacked. According to that difficulty, a systematic design scheme is proposed that includes aerodynamic modeling, multi-disciplinary optimization and simulation and testing. Numerical calculation combined with experiment is used in aerodynamic modeling. Multi-disciplinary optimization is emphasized on the capacity of endurance, and ? nally, the design veri ? cation and feedback by comparing simulation results and prototype ? ight testing data. This design method applies to most MA V design.Key words : MA V ; developing status ; conceptual design 收稿日期:2010-03-17;修订日期:2010-09-20 微型飞行器(Micro Air Vehicle, MAV)又称纳米飞行器或微纳米飞行器。微型飞行器定义为一种尺寸为15 cm大小并能靠其自身能力飞行和完成各种探测任务的飞行器[1]。微型飞行器是于20世纪90年代发展起来,其应用技术基本上已超出 传统的飞机设计和空气动力技术的研究范畴,是对传统航空技术的一种挑战,同时它的出现也开拓了纳米技术和微机电系统技术在航空领域的应用。微型飞行器的发展和应用,必将推动国防科技工业的发展,并且具有广阔的民用前景。