四旋翼无人飞行器设计学习笔记
1、互补滤波算法
互补滤波器作为一种频域滤波器,常用于融合来自不同传感器测量得到的数据。一般地,互补滤波器包含至少两种频率特性互补的输入信号。例如,对于陀螺仪和加速度计解算姿态这一双输入系统,两个输入量都能分别对姿态角进行解算,其中加速度计输入量包含高频,应通过低通滤波器来滤除;陀螺仪则包含低频噪声(积分漂移),应采用高频滤波器滤队。两者的频率特性互补,可用互补滤波思想进行姿态解算,最终输出较准确信号。
2、四元数表示姿态角
运用互补滤波与卡尔曼滤波思想进行姿态整合的过程归根结底都是利用加速度计解算出的姿态角去修正陀螺仪积分的漂移误差.
这两种方法在姿态融合过程中姿态角的表示形式都是欧拉角表示.但是用欧拉角进行姿态解算在大角度计算时会出现万向节锁(角度为90度时加速度计进行姿态解算的反三解函数无解),为了避免该问题,可采用四元数来解算姿态.
四元数的优点:
·四元数不会存在欧拉角的万向节死锁的问题
·四元数由4个数组成2个四元数之间更容易插值
·对四元数规范化正交化计算更加容易
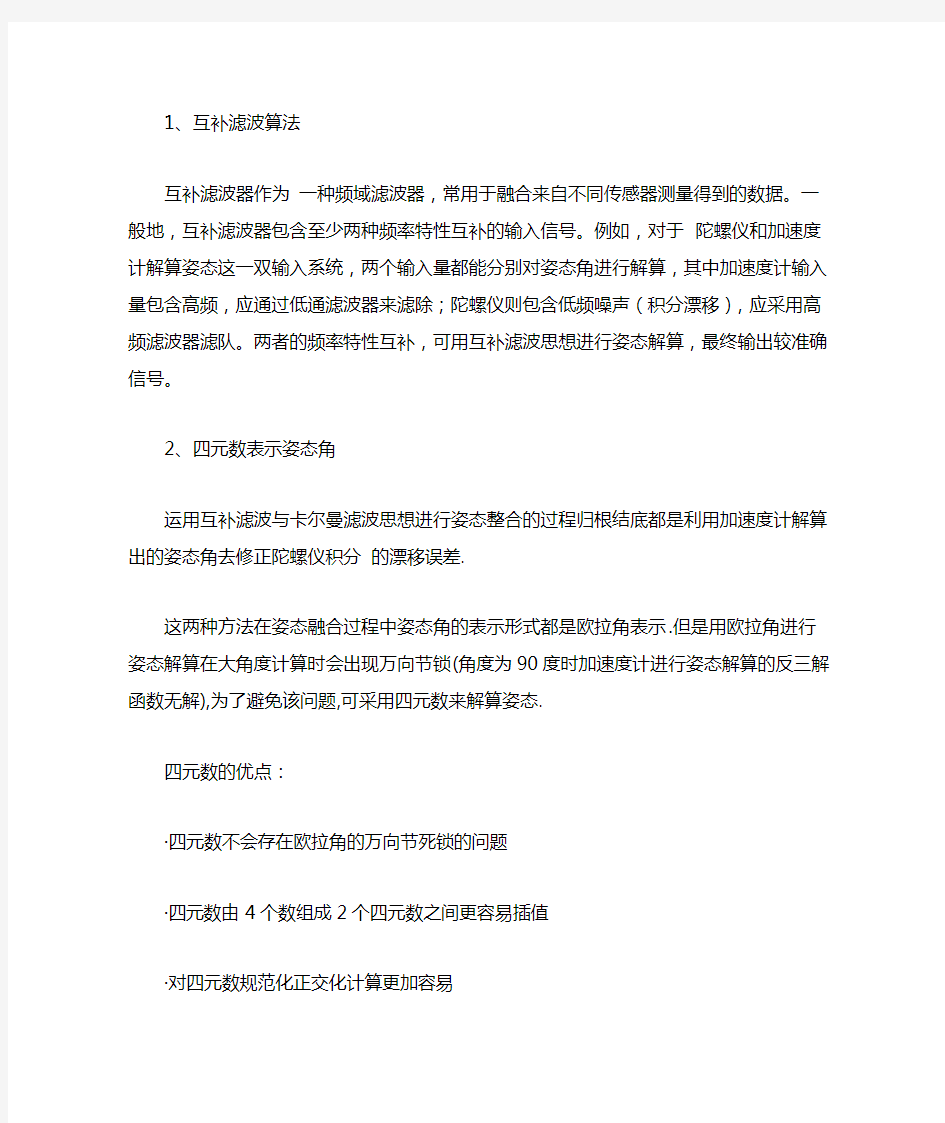
3、MPU6050 DMP内部四元数解算功能
运动控制传感器MPU6050提供了DMP内部四元数解算功能,可以直接输出四元数数据。它除了提供三轴陀螺仪和三轴加速度计传感器的16位ADC信号采集功能之外,还集成了数字低通滤波器和数字运动处理DMP,可以直接输出经低通滤波处理和四元数姿态解算后的四元数数据。将该四元数转换为欧拉角,可以得到准确的俯仰角和橫滚角。
4、PID 控制
由自动控制原理可知,采用角速度反馈闭环控制可有效增加系统稳定性,因此,在进行状态角控制之前需设计姿态角速度增稳内环控制。同时,系统最终控制量为空间位置,因此需要增加外环位置控制。由此得到四轴飞行器俯仰角方向整体控制结构:
4.1、PID 控制
比例控制指的是使用一个比例系数对输入量与期望量的差进行放大或缩小。不过单纯的比例控制会产生静态误差(误差不会收敛于0),所以这时要加入积分控制,对误差进行积分再乘以积分系数,误差累计越大积分控制的比重越大。其优点是可以消除静态误差;其缺点是不稳定,会使系统产生振荡。微分控制是预测系统的变化趋势。当输入的数据缓慢变化时微分项不起作用,当产生一个阶跃响应瞬间发生变化时,微分项发挥作用,做“超前控制”。
4.2串级PID
当将两个PID串联起来,用第一个PID的输出量作为第二个PID的输入量,第一个PID的期望量为期望达到的角度,第二个PID的期望量为此时该轴的角速度,角度环为1级PID为外环,角速度环为2级PID为内环
串级PID较单级PID的优点是,作为内环的角速度由陀螺仪采集数据输出,采集值一般不存在受外界影响的情况,抗干扰能力强,并且角速度变化灵敏,当受外界干扰时,回复迅速,这样使四轴在飞行时抗干扰能力强,飞行更稳定.
4.3PID调试过程详解--P64
5、姿态传感器
MPU6050:内部集成3轴陀螺仪、3轴加速度计
MPU9250:内部集成3轴陀螺仪、3轴加速度计、3轴磁力计。
6、无刷电机
无刷电机是采用无刷电子调速器实现电子换向,具有可靠性高、无换向中火花、机械噪声低。电机产品的型号一般以KV值为准、KV值是指r/(min .V),指的是当输入电压增加1V时,
无刷电机空转转速增加的转速值。对于同尺寸规格的无刷电机来说,绕线匝数多,KV值低,最高输出电流小,但是扭力大;绕线匝数少,KV值高,最高输出电流大,但是扭力小。
7、无刷电子调速器
无刷电调输入的是直流,可以接稳压电源或电池。输出是三相交流,直接与电机的三相输入端连出,用来与接收机连接,控制电机的运转。当上电时,电机反转,需要把电机输入端三根导线的任意两根对换位置。
8、气压计的设计P85
高度传感器可以考虑使用超声波模块,气压计模块和GPS模块。对于超声波模块输出的数值能精确到0.1cm,输出间隔小、精度高是其优点;其缺点是要求地面平整无障碍物,有高度限制,太高时超声波就失去作用。气压计是采集当前的气压值和温度通过换算能够得到当前的海拨高度,从而可以进一步地计算出地面和窜的相对高度。使用气压计的优点是没有高度的限制,在室内室外都可以使用。其缺点是气压计模块的精度普遍不高。比如MS5611的精度为10cm。在气压计模块中精度算是较高的。还有一个就是GPS模块,GPS可以提供很多实用的数据,但是精度有限,还有一个致使的缺陷就是室内无法在使用辅助手段下收到有效良好的信号,只适合在室外使用,这点使其在室内调试大不方便。
9、定高的实现P95
如果获取了高度值,以及Z轴的速度值。使用气压计结算出的高度值作为高度串级PID控制的外环输入,使用气压计结算出的高度速度变化量作为串级PID的内环输入,使用串级PID 作为控制方法使可调参数比单级PID增加,鲁捧性更好,使控制性能较单级PID有所提高。
基于STM32的四旋翼飞行器设计
摘要 四轴飞行器是一种结构紧凑、飞行方式独特的垂直起降式飞行器,与普通飞行器相比,具有结构简单、故障率低和单位体积能够产生更大升力等优点,所以在军事和民用多个领域都有广阔的应用前景,非常适合在狭小空间内执行任务。 本设计采用stm32f103zet6作为主控芯片,3轴加速度传感器mpu6050作为惯性测量单元,通过2.4G无线模块和遥控板进行通信,最终使用PID控制算法以PWM方式控制电子调速器驱动电机实现了四轴飞行器的设计。 关键词:四轴飞行器,stm32;mpu6050,2.4G无线模块.PID.PWM
Abstract Quadrocopter has broad application prospect in the area of military and civilian because of its advantages of simple structure. Small size, low failure rate, taking off and landing ertically . etc. it is suitable for having task in narrow space. This design uses STM32f103zet6 as the master chip, and triaxial accelerometer mpu6050 inertial measurement unit, via 2.4G wireless module and remote control panel for communication. Finally using pid control algorithm with pwm drives the electronic speed controller to change moto to realize the design of quadrocopter. Key word : quadrocopter,stm32,mpu6050,2.4G wireless module ;pid; pwm
2015年全国大学生电子设计大赛四旋翼飞行器论文
2015年全国大学生电子设计竞赛多旋翼自主飞行器(C题) 2015年8月15日
摘要 本文对四旋翼碟形飞行器进行了初步的研究和设计。首先,对飞行器各旋翼的电机选择做了论证,分析了实际升力效率与PWM的关系并选择了此样机的最优工作频率,并重点对飞行器进行了硬件和软件的设计。 本飞行器采用瑞萨R5F100LEA单片机为主控制器,通过四元数算法处理传感器MPU6000采集机身平衡信息并进行闭环的PID控制来保持机身的平衡。整个控制系统包括电源模块、传感器检测模块、电机调速模块、飞行控制模块及微处理器模块等。角度传感器和角速率传感模块为整个系统提供飞行器当前姿态和角速率信号,构成飞行器的增稳系统。本系统经过飞行测试,可以达到设计要求。关键字:R5F100LEA单片机、传感器、PWM、PID控制。
目录 1系统方案 (1) 1.1电机的论证与选择 (1) 1.2红外对管检测传感器的论证与选择 (1) 1.3电机驱动方案的论证与选择 (2) 2系统控制理论分析 (2) 2.1控制方式 (2) 2.2 PID模糊控制算法 (2) 3控制系统硬件与软件设计 (4) 3.1系统硬件电路设计 (4) 3.1.1系统总体框图 (4) 3.1.2 飞行控制电路原理图 (4) 3.1.3电机驱动模块子系统 (5) 3.1.4电源 (5) 3.1.5简易电子示高模块电路原理图 (6) 3.2系统软件设计 (6) 3.2.1程序功能描述与设计思路 (6) 3.2.2程序流程图 (6) 4测试条件与测试结果 (7) 4.1 测试条件与仪器 (7) 4.2 测试结果及分析 (7) 4.2.1测试结果(数据) (7) 4.2.2测试分析与结论 (8) 附录1:电路图原理 (9) 附录2:源程序 (10)
四旋翼设计报告
四旋翼自主飞行器(A题) 摘要 四旋翼飞行器是无人飞行器中一个热门的研究分支,随着惯性导航技术的发展与惯导传感器精度的提高,四旋翼飞行器在近些年得到了快速的发展。 为了满足四旋翼飞行的设计要求,系统以STM32F103VET6作为四旋翼自主飞行器控制的核心,处理器内核为ARM32位Cortex-M3 CPU,最高72MHz工作频率,工作电压3.3V-5.5V。该四旋翼由电源模块、电机电调调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行姿态检测模块是通过采用MPU-6050模块,整合3轴陀螺仪、3轴加速度计,检测飞行器实时飞行姿态,实现飞行器运动速度和转向的精准控制。传感器检测模块包括红外障碍传感器、超声波测距模块,在动力学模 型的基础上,将四旋翼飞行器实时控制算法分为两个PID 控制回路,即位置控制回 路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。 关键词:四旋翼飞行器;STM32;飞行姿态控制;串口PID
目录 1 系统方案论证与控制方案的选择...................................................................- 2 - 1.1 地面黑线检测传感器...................................................................... .............- 2 - 1.2 电机的选择与论证...................................................................... .................- 2 - 1.3 电机驱动方案的选择与论证...................................................................... .- 2 - 2 四旋翼自主飞行器控制算法设计...................................................................- 3 -
四旋翼无人机毕业设计
渤海大学本科毕业论文(设计)四旋翼无人机设计与制作 The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle 学院(系): 专业: 学号: 学生姓名: 入学年度: 指导教师: 完成日期:
摘要 四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此它成为了近几年来发展起来的热门产业。在这里本文详细的介绍了四旋翼飞行器的设计和制作的过程,其中包括了四旋翼无人机飞行器的飞行原理,硬件的介绍和选型,姿态参考算法的推导和实现,系统软件的具体实现。该四旋翼飞行器控制系统以STM32f103zet 单片机为核心,根据各个传感器的特点,采用不同的校正方法对各个传感器数据进行校正以及低通数字滤波处理,之后设计了互补滤波器对姿态进行最优估计,实现精确的姿态测量。最后结合GPS控制与姿态控制叠加进行PID控制四旋翼飞行器的四个电机,来达到实现各种飞行动作的目的。在制作四旋翼飞行器的过程中,进行了大量的调试并且与现有优秀算法做对比验证,最终设计出能够稳定飞行的四旋翼无人机飞行器。 关键词:姿态传感器;四元数姿态解算;STM32微型处理器;数据融合;PID
The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle Abstract Quad-rotor unmanned aerial vehicle aircraft have a simple structure, and it is very easy to control, so it has become popular in recent years. Here article describes in detail the design and the process of making the four-rotor aircraft, including Quad-rotor UAV aircraft flight principle, hardware introduction and selection, implementation and realization of derivation attitude reference algorithm, the system software . The Quad-rotor aircraft control system STM32f103zet microcontroller core, and the advantages and disadvantages based on the accelerometer sensor, a gyro sensor and electronic compass sensors using different correction methods for correcting various sensor data and low-pass digital filter processing, after design complementary filter to estimate the optimal posture, precise attitude measurement. Finally, GPS control and attitude control PID control is superimposed four-rotor aircraft four motors to achieve a variety of flight maneuvers to achieve the purpose. Four-rotor aircraft in the production process, a lot of debugging and do comparison with the existing excellent algorithm validation, the final design to stabilize the Quad-rotor UAV flying aircraft. Key Words:MEMS Sensor; Quaternion; STM32 Processor; Data Fusion; PID
电子设计大赛四旋翼设计报告最终版
四旋翼飞行器(A 题)参赛队号:20140057号
四旋翼飞行器 设计摘要: 四旋翼作为一种具有结构特殊的旋转翼无人飞行器,与固定翼无人机相比,它具有体积小,垂直起降,具有很强的机动性,负载能力强,能快速、灵活的在各个方向进行机动,结构简单,易于控制,且能执行各种特殊、危险任务等特点。 因此在军用和民用领域具有广泛的应用前景如低空侦察、灾害现场监视与救援等。多旋翼无人机飞行原理上比较简单,但涉及的科技领域比较广,从机体的优化设计、传感器算法、软件及控制系统的设计都需要高科技的支持。 四旋翼无人机的飞行控制技术是无人机研究的重点之一。它使用直接力矩,实现六自由度(位置与姿态)控制,具有多变量、非线性、强耦合和干扰敏感的特性。此外,由于飞行过程中,微型飞行器同时受到多种物理效应的作用,还很容易受到气流等外部环境的干扰,模型准确性和传感器精度也将对控制器性能产生影响,这些都使得飞行控制系统的设计变得非常困难。 因此,研究既能精确控制飞行姿态,又具有较强抗干扰和环境自适应能力的姿态控制器是微小型四旋翼飞行器飞行控制系统研究的当务之急。
一、引言: 1.1 题目理解:四旋翼飞行器,顾名思义,其四只旋转的翅膀为飞行的动力来源。四只旋转翼是无刷电机,因此对于无刷电机的控制调速系统对飞行器的飞行性能起着决定性的作用。在本次大赛中,需要利用四旋翼飞行器平台,实现四旋翼的起飞,悬停,姿态控制,以及四旋翼和地面之间的测距等功能。 1.2 设计思路:为了满足飞行器的设计要求,要使用以微控制器为核心的控制系统,使本系统以MC9S12XS128模拟出控制信号,用STM32 MMC10接收模拟信号,然后翻译出模拟信号,利用加速度与陀螺仪传感器采集飞行器的飞行数据,加以闭环调控和精准的控制算法。进行上升、下降以及悬停等动作。 1.3 特点:本飞行器脱离遥控器控制,用微处理器实现整个飞行过程全自动控制,控制精度高。 二、方案设计: 系统主要由STM32模块,微处理器MC9S12XS128模块,电源模块,电机模块,超声波模块,加速度陀螺仪模块等构成。 系统总体框图如下图(图2.0): STM32 MMC10 四路 PWM 通道 电调 无刷电机 高度显示数码管 信号接收 MC9S12XS128 GPIO 模块 时钟 模块 超声波传 感器 电源 图2.0 其中微处理器MC9S12XS128模块的外围电路见附录一2.1 控制系统选择方案:
四旋翼直升机的动力学原理
冯如杯论文 《四旋翼飞行器的设计与控制》 院(系)名称机械工程及自动化学院 作者姓名薛骋豪 学号35071422 指导教师梁建宏 2008年3月22日
四旋翼飞行器的设计与控制 薛骋豪 摘要 四旋翼直升机,其主旋翼分成前后与左右两组,旋转时方向相反,因此与一般直升机最主要的不同点为四旋翼直升机不需要用尾旋翼来平衡机体。因为四旋翼直升机为不稳定系统,因此需利用旋转专用的感测器:陀螺仪来感知机身的平衡程度并将讯号传送至微控制器,再通过微控制器内部程序的运算产生控制信号来控制机体上四个旋翼的转速,以维持整个机身的平衡促使四旋翼直升机能顺利飞行。 关键词:四旋翼、VTOL(垂直起降)、矩阵控制、 Abstract Quadrotor, its main rotor divides into with two about groups from beginning to end, in opposite direction while rotating, so Quadrotor and does not need to fasten the wing and having the balance organism for four with the end with the main difference of general helicopter. Whether four fasten wing helicopter stable system, need to utilize and rotate the special-purpose detecting device. The gyroscope comes to perceive balancing the degree and conveying the signal to the little controller of the fuselage, and then produce the control signal to control four rotational speed of fastenning the wings on the organism through the operation of the procedure within the little controller, impel four to fly smoothly while Quadrotor for the balance of maintaining the whole fuselage. Key words: Quadrotor、VTOL(Vertical Take-Off and Landing)、matrix control
基于WIFI的智能多功能微型四旋翼飞行器设计
基于WIFI的智能多功能微型四旋翼飞行器设计 摘要:本文基于WIFI无线传输技术,通过建立四旋翼飞行器的空气动力数学模型,结合实际需求分析,通过单片机总控,各功能模块有机整合,优化软硬件设计,完成最终制作调试,实现飞行器的自由巡航、悬停、降落和视频探测等功能,达到了预期设计目标。 关键词:WIFI;四旋翼;飞行器 1.引言 四旋翼飞行器是一种可以实现垂直起降的旋翼式无人飞行器,具有操控简单,体积小,机动性强,启动快,方便拍摄等优点,能及时地将诸如地震、矿难等特殊现场第一手资料传送回控制中心,帮助我们了解现场状况并作出正确判断[1]。 国外对旋翼式飞行器的研究较多且较深入,我国在该领域的研究起步较晚,成果相对较弱,并且侧重点有所不同,有的侧重数学建模,有的侧重自动控制与研发等等[2]。 本文于是针对自然灾害等特殊现场设计了一种基于WIFI的智能多功能四旋翼飞行器,采用独立控制的四旋翼,升力更大,同时可狭小空间内起降,还具有机械结构简单、机动灵活、操控性高及成本低等优势。 2.建立动力学模型 2.1 坐标变换 四旋翼飞行器的四个旋翼都高速旋转,其所受的空气动力比较复杂,要建立非常准确的空气动力学模型比较困难,为了简化四旋翼飞行器的数学模型,可忽略其弹性形变[3]。为了相对准确的描述飞行器运动状态,建立三维数学坐标系,也叫机体坐标系。OX轴指向地平面方向,由右手定则确定OY轴和OZ轴的方向。用原点O表示飞行器的重心,则OX轴指向飞行器的前方,OY轴指向飞行器的右方,OZ轴指向飞行器的上方。地面三维坐标系与机体坐标系之间存在三个欧拉角:偏航角ψ(沿Z轴方向)、滚动角φ(沿X轴方向)和俯仰角q(沿Y轴方向)。两个坐标系之间的关系如下: ,,(1) 可进一步的转换矩阵得: (2) 经计算可得如下坐标转换公式:
四旋翼飞行器论文(原理图 程序)..
四旋翼自主飞行器(B题) 摘要 系统以R5F100LE作为四旋翼自主飞行器控制的核心,由电源模块、电机调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行控制模块包括角度传感器、陀螺仪,传感器检测模块包括红外障碍传感器、超声波测距模块、TLS1401-LF模块,瑞萨MCU综合飞行器模块和传感器检测模块的信息,通过控制4个直流无刷电机转速来实现飞行器的欠驱动系统飞行。在动力学模型的基础上,将小型四旋翼飞行器实时控制算法分为两个PID控制回路,即位置控制回路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。
目录 1 系统方案论证与控制方案的选择............................................................................................. - 2 - 1.1 地面黑线检测传感器............................................................................................................. - 2 - 1.2 电机的选择与论证................................................................................................................. - 2 - 1.3 电机驱动方案的选择与论证................................................................................................. - 3 - 2 四旋翼自主飞行器控制算法设计............................................................................................. - 3 - 2.1 四旋翼飞行器动力学模型..................................................................................................... - 3 - 2.2 PID控制算法结构分析.......................................................................................................... - 3 - 3 硬件电路设计与实现................................................................................................................. - 5 - 3.1飞行控制电路设计.................................................................................................................. - 5 - 3.2 电源模块................................................................................................................................. - 6 - 3.3 电机驱动模块......................................................................................................................... - 6 - 3.4 传感器检测模块..................................................................................................................... - 7 - 4 系统的程序设计......................................................................................................................... - 8 - 5 测试与结果分析......................................................................................................................... - 9 - 5.1 测试设备................................................................................................................................. - 9 - 5.2 测试结果................................................................................................................................. - 9 - 6 总结........................................................................................................................................... - 10 - 附录A 部分程序清单.................................................................................................................. - 11 -
四旋翼飞行器实验报告
实验报告 课程名称:《机械原理课内实验》 学生姓名:徐学腾 学生学号:1416010122 所在学院:海洋信息工程学院 专业:机械设计制造及其自动化 报导教师:宫文峰 2016年6 月26 日
实验一四旋翼飞行器实验 一、实验目的 1.通过对四旋翼无人机结构的分析,了解四旋翼无人机的基本结构、工作的原理和传动控制系统; 2. 练习采用手机控制终端来控制无人机飞行,并了解无人机飞行大赛的相关内容,及程序开发变为智能飞行无人机。 二、实验设备和工具 1. Parrot公司AR.Drone 2.0四旋翼飞行器一架; 2. 苹果手机一部; 3. 蓝牙数据传输设备一套。 4. 自备铅笔、橡皮、草稿纸。 三、实验内容 1、了解四旋翼无人机的基本结构; 2、了解四旋翼无人机的传动控制路线; 3、掌握四旋翼无人机的飞行控制的基本操作; 4、了解四旋翼无人机翻转动作的机理; 5、能根据指令控制无人机完成特定操作。 四、实验步骤 1、学生自行用IPHONE手机下载并安装AR.FreeFlight四旋翼飞行器控制软件。 2、检查飞行器结构是否完好无损; 3、安装电沲并装好安全罩; 4、连接WIFI,打开手机AR.FreeFlight软件,进入控制界面; 5、软件启动,设备连通,即可飞行。 6、启动和停止由TAKE OFF 控制。 五、注意事项 1.飞行器在同一时间只能由一部手机终端进行控制; 2. 飞行之前,要检查螺旋浆处是否有障碍物干涉; 3. 飞行之后禁止用手去接飞行器,以免螺旋浆损伤手部; 4. 电量不足时,不可强制启动飞行; 5. 翻转特技飞行时,要注意飞行器距地面高度大于4米以上; 6. 飞行器不得触水; 7. 飞行器最大续航时间10分钟。
四旋翼飞行器的结构形式和工作原理
四旋翼飞行器的结构形式和工作原理 1.结构形式 直升机在巧妙使用总距控制和周期变距控制之前,四旋翼结构被认为是一种最简单和最直观的稳定控制形式。但由于这种形式必须同时协调控制四个旋翼的状态参数,这对驾驶员认为操纵来说是一件非常困难的事,所以该方案始终没有真正在大型直升机设计中被采用。这里四旋翼飞行器重新考虑采用这种结构形式,主要是因为总距控制和周期变距控制虽然设计精巧,控制灵活,但其复杂的机械结构却使它无法再小型四旋翼飞行器设计中应用。另外,四旋翼飞行器的旋翼效率相对很低,从单个旋翼上增加拉力的空间是非常有限的,所以采用多旋翼结构形式无疑是一种提高四旋翼飞行器负载能力的最有效手段之一。至于四旋翼结构存在控制量较多的问题,则有望通过设计自动飞行控制系统来解决。四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。四旋翼飞行器的结构形式如图1.1所示。
图1.1四旋翼飞行器的结构形式 2.工作原理 典型的传统直升机配备有一个主转子和一个尾桨。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
电子设计大赛国赛_四旋翼自主飞行器A题
2013年全国大学生电子设计竞赛课题:四旋翼自主飞行器(B 题) 【本科组】 2013年9月7日
摘要 为了满足四旋翼飞行器的设计要求,设计了以微控制器为核心的控制系统和算法。首先进行了各单元电路方案的比较论证,确定了硬件设计方案。四旋翼飞行器采用了固连在刚性十字架交叉结构上的4个电机驱动的一种飞行器,以78K0R CPU內核为基础,围绕新的RL78 CPU內核演化而来的RL78/G13作为控制核心,工作频率高达32MHz,工作电压1.6V-5.5V,适合各种类型的消费类电子和工业应用, 满足8/16位微控制器的需求,有助于降低系统功耗,削减总系统的构建成本。采用9926B MOS管芯片的驱动直流电机,该驱动芯片具有内阻小、负载电流大、且控制简单的特性。通过采用MPU-6050整合的3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,实现了四旋翼飞行器运动速度和转向的精准控制。通过HC-SR04超声波测距模块实现了对四旋翼飞行器飞行高度的准确控制。通过激光传感器,实现了四旋翼飞行器沿黑线前进,在规定区域起降,投放铁片等功能,所采用的设计方案先进有效,完全达到了设计要求。 关键词:四旋翼自主飞行器,E18-D50NK光电传感器,寻线,超声波,单片机。
四旋翼自主飞行器(B 题) 【本科组】 1系统方案 本系统主要由电源模块、电机驱动模块、光电循迹模块模块、超声波测高模块、姿态传感器模块组成,下面分别论证这几个模块的选择。 1.1 电源模块的论证与选择 方案一:采用线性元器件LM7805三端稳压器构成稳压电路,为单片机等其他模块供电,输出纹波小,效率低,容易发热。 方案二:采用元器件2596为开关稳压芯片,效率高,输出的纹波大,不容易发热。 方案三:采用线性元器件2940构成稳压电路,为单片机等其他模块供电,输出纹波小,效率高,不容易发热,综合性能高。 综合以上三种方案,选择方案三。 1.2 电机驱动模块的论证与选择 方案一:采用三极管驱动,由于输出电流很大,容易发热, 方案二:采用L298N电机驱动模块,通过电流大,容易发热,使得电机转速变慢,载重量变小。 方案三:采用场效应管9926B芯片组成的电机驱动模块,驱动能力好。能承受的最大电流为7.5A,符合要求。 综合以上三种方案,选择方案三。 1.3 光电循迹模块的论证与选择 方案一:采用CCD摄像头采集图片经过算法处理循迹,前瞻性比较好、循迹效果好,但是处理程序复杂、成本高。 方案二:采用红外对管,有效距离太短,不能满足实际循迹要求。 方案三:采用E18-D50NK光电传感器,这是一种集发射与接收于一体的光电传感器, 检测距离可以根据要求进行调节。探测距离远、受可见光干扰小、前瞻性较好、抗干扰性较好。
四旋翼飞行器设计资料
四旋翼飞行器的设计 四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转 速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行 控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制单元,给出了飞行控制系统的硬件设计,研究了设计中的关键技术;由于采用贴片封装和低功耗的元器件,使飞行器具有重量轻、体积小、功耗低的优点;经过多次室内试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落等飞行模态的控制要求. 一.微小型四旋翼飞行器的发展前景 根据微小型四旋翼飞行器发展现状和相关高新技术发展趋势, 预计它将有以下发展前景。 1 )随着相关研究进一步深入,预计在不久的将来小型四旋翼飞行 器技术会逐步走向成熟与实用。任务规划、飞行控制、无 G P S 导航、视觉和通信等子系统将进一步健全和完善,使其具有自主起降和全天候抗干扰稳定飞行能力。它未来的主要技术指标:任务半径 5 k m,飞行高度 1 0 0 m,续航时间 1 h ,有效载荷约 5 0 0 g ,完全能够填补目前国际上在该范围内侦察手段的空白。 2 )未来的微型四旋翼飞行器将完全能够达到美国国防预研局对 M A V基本技术指标的要求。随着低雷诺数空气动力学研究的深入,以及纳米和 M E MS 技术的发展,四旋翼 M A V必然取得理论和工程上的突破。它将是一种有 4个旋翼的可飞行传感器芯片,是一
任务与通信等子与能源、动力导航与控制、 ( 个集成多个子系统系统) 的高度复杂ME M S系统;不但能够在空中悬停和向任意方向机动飞行,还 能飞临、绕过甚至是穿过目标物体。此外,它还将拥有良好的隐身功能和信息传输能力。 3 )微小型四旋翼飞行器的编队飞行与作战应 在未来的战争中,微小型四旋翼飞行器的任务之一将是对敌方进行电子干扰并攻击其核心目标。单个微小型飞行器的有效载荷量毕竟有限,难以有效地完成任务,而编队飞行与作战不仅可以极大地提高有效载荷量,还能够增强其突防能力。 二.四旋翼飞行器的国内外研究现状 目前世界上存在的四旋翼飞行器基本上都属于微小型无人飞行器,一般可分为3类:遥控航模四旋翼飞行器、小型四旋翼飞行器以及微型四旋翼飞行器。 (1)遥控航模四旋翼飞行器 遥控航模四旋翼飞行器的典型代表是美国Dfaganflyer公司研制的Dragan.flyer III和香港银辉(silverlit)玩具制品有限公司研制的X.UFO。Draganflyer III是一款世界著名的遥控航模四旋翼飞行器,主要用于航拍。机体最大长度(翼尖到翼尖)76.2cm,高18cm,重481.19:旋翼直径28cm,重69;有效载荷113.29;可持续飞行16--20min。Draganflyer III采用了碳纤维和高性能塑料作为机体材料,其机载电子设备可以控1书1]4个电机的转速。另外,还使用
四旋翼飞行器 设计报告
大学生电子设计竞赛 设计报告 摘要:本设计实现基于STM32开发板的十字形四旋翼飞行器,四旋翼由主控制板、陀螺仪、电机模块、超声波测距、电源和投弹打靶模块等六部分组成。其中,控制核心STM32负责飞行器姿态数据接收和飞行姿态控制;陀螺仪采用MPU6050模块,该模块经过卡尔曼滤波处理采集的数据,输出数据,用PID控制算法对数据进行处理,同时,解算出相应电机需要的的PWM增减量,及时调整电机转速,调整飞行姿态,使飞行器的飞行的更加稳定。电机模块通过电调控制无刷直流电机,超声波传感器进行测距,起飞后悬停在一定高度,打靶后降落。 关键词:四旋翼;PID控制;陀螺仪,姿态角,电机控制
2
目录 1系统方案 (1) 1.1控制系统选择方案 (1) 1.2飞行姿态控制方案论证 (1) 1.3角度测量模块的方案论证 (2) 1.4高度测量模块方案论证.............................................. 错误!未定义书签。2理论分析与计算 (2) 2.1控制模块 .................................................................... 错误!未定义书签。 2.2机翼电机 .................................................................... 错误!未定义书签。 2.3飞行姿态控制单元 (3) 3电路与程序设计 (4) 3.1系统总体设计思路 (4) 3.2主要元器件清单......................................................... 错误!未定义书签。 3.3系统框图 .................................................................... 错误!未定义书签。 3.3.1系统硬件框图 ..................................................... 错误!未定义书签。 3.3.2系统软件框图 ..................................................... 错误!未定义书签。4测试方案与测试结果.. (5) 5结论 (6) 3
四轴飞行器毕业设计论文
毕业论文 基于单片机的四轴飞行器 夏纯 吉林建筑大学 2015年6月
毕业论文 基于单片机的四轴飞行器学生:夏纯 指导教师:许亮 专业:电子信息工程 所在单位:电气与电子信息工程学院 答辩日期:2015 年6月
目录 摘要 ...................................................................................................................................... ABSTRACT ........................................................................................................................... 第1章绪论......................................................................................................................... 1.1 论文研究背景及意义........................................................................................... 1.2 国内外的发展情况 ............................................................................................... 1.3 本文主要研究内容 ............................................................................................... 第2章总体方案设计....................................................................................................... 2.1 总体设计原理 ........................................................................................................ 2.2 总体设计方案 ........................................................................................................ 2.2.1 系统硬件电路设计方案............................................................................ 2.2.2 各部分功能作用.......................................................................................... 2.2.3 系统软件设计方案 ..................................................................................... 第3章系统硬件电路设计.............................................................................................. 3.1 Altium Designer Summer 09简介........................................................................ 3.2 总体电路设计 ........................................................................................................ 3.2.1 遥控器总体电路设计................................................................................. 3.2.2 飞行器总体电路设计................................................................................. 3.3 各部分电路设计.................................................................................................... 3.3.1 电源电路设计 .............................................................................................. 3.3.2 主控单元电路设计 .....................................................................................
四轴飞行器结题报告
学校名称: 队长姓名: 队员姓名: 指导教师姓名:2013年9月6日
摘要 本次比赛我们需要很好地控制飞行器,让它自主完成比赛应该完成的任务。 本文的工作主要针对微型四旋翼无人飞行器控制系统的设计与实现问题展开。首先制作微型四旋翼无人飞行器实验平台,其次设计姿态检测算法,然后建立数学模型并设计姿态控制器和位置控制器,最后通过实验对本文设计的姿态控制器进行验证。设计机型设计全部由小组成员设计并制作,部分元件从网上购得,运用RL78/G13作为主控芯片,自行设计算法对飞行器进行,升降,俯仰,横滚,偏航等姿态控制。并可以自行起飞实现无人控制的自主四轴飞行器。 关键字:四旋翼无人飞行器、姿态控制、位置控制
目录 第1章设计任务.................................................................................... 错误!未定义书签。 1.1 研究背景与目的........................................................................ 错误!未定义书签。 1.2 .................................................................................................... 错误!未定义书签。 1.3...................................................................................................... 错误!未定义书签。第2章方案论证.................................................................................... 错误!未定义书签。 2.1...................................................................................................... 错误!未定义书签。 .................................................................................................... 错误!未定义书签。 .................................................................................................... 错误!未定义书签。 2.2 ........................................................................................................... 错误!未定义书签。第3章理论分析与计算........................................................................ 错误!未定义书签。 ........................................................................................................... 错误!未定义书签。第4章测试结果与误差分析................................................................ 错误!未定义书签。 4.1...................................................................................................... 错误!未定义书签。 4.2...................................................................................................... 错误!未定义书签。 4.3...................................................................................................... 错误!未定义书签。 4.4 .................................................................................................... 错误!未定义书签。 ........................................................................................................... 错误!未定义书签。第5章结论心得体会............................................................................ 错误!未定义书签。 5.1 .................................................................................................................. 错误!未定义书签。.................................................................................................................. 错误!未定义书签。 2设计任务: 基本要求 (1)四旋翼自主飞行器(下简称飞行器摆放在图1所示的A区,一键式