ASM自动焊线机(ihawk)
ASM 自动焊线机简介目录
一、键盘功能简介:2
1、键盘位置22、常用按键功能简介2
二、主菜单(MAIN)介绍:3
三、机台的基本调整:3
1、编程3
①.设置参考点(对点)3
②.图像黑白对比度(做PR)4
③.焊线设定(编线)4
④.复制5
⑤.设定跳过的点5
⑥.做瓷嘴高度(测量高度)及校准可接受容限(容差值)5
⑦.一焊点脱焊侦测功能开关设定5
2、校准PR6
①.焊点校正(对点)6
②.PR光校正(做光)6
③.焊线次序和焊位校正6
3、升降台的调整(料盒部位)6四、更换材料时调机步骤:6
1、调用程序62、轨道高度调整73、支架走位调整74、PR编辑(做PR)85、测量焊接高度(做瓷嘴高度)86、焊接参数和线弧的设定8
①.时间、功率、压力设定8
②.温度设定8
③.弧度调整9
④.打火高度设定9
⑤.打火参数及金球大小设定9
五、常见品质异常分析:10
1、虚焊、脱焊10
2、焊球变形10
3、错焊、位置不当10
4、球颈撕裂10
5、拉力不足10
六、更换磁嘴:10
七、常见错误讯息:10
八、注意事项11
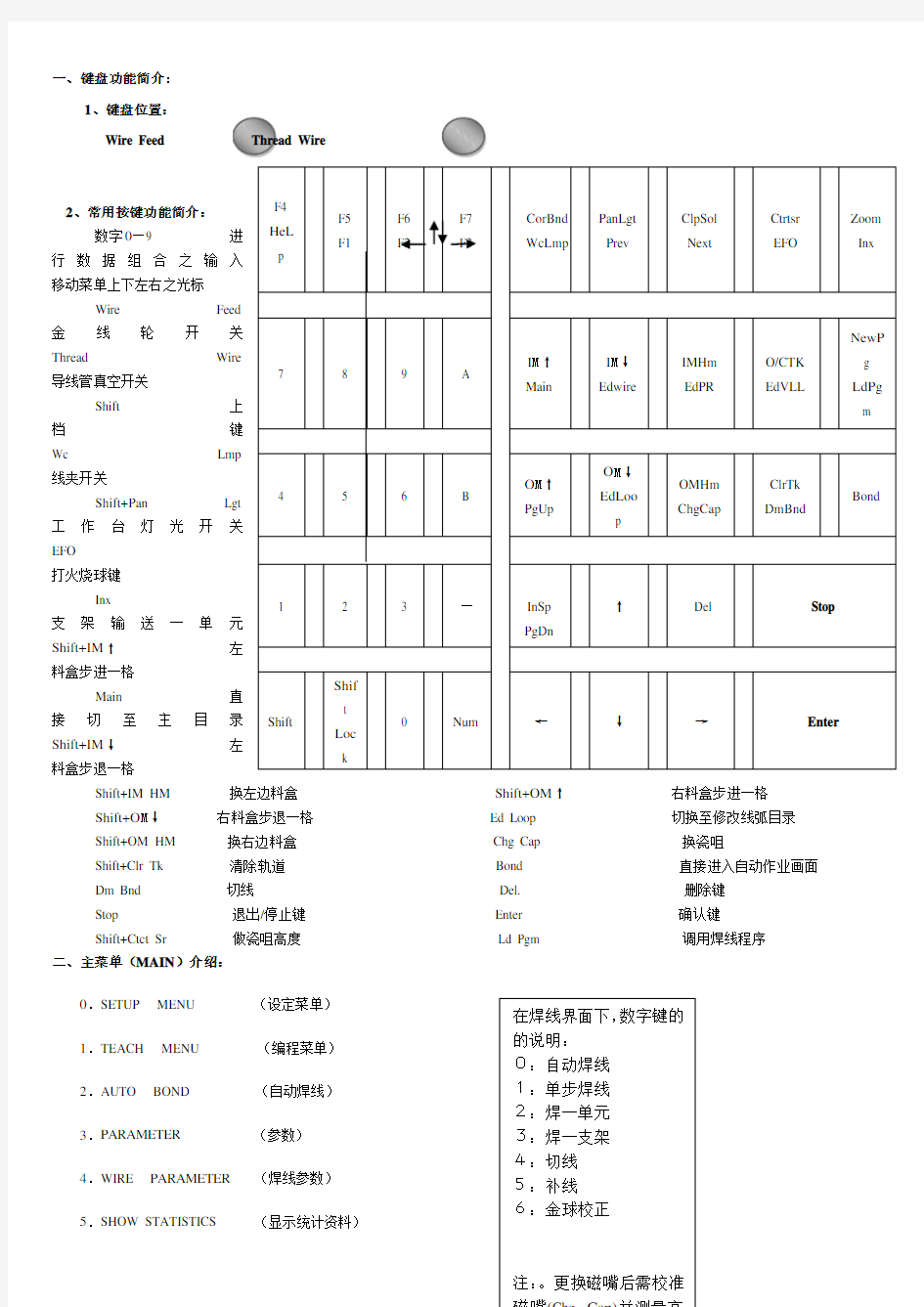
一、键盘功能简介:
1、键盘位置:
Wire Feed
2、常用按键功能简介:
数字0—9 行数据组合之输移动菜单上下左右之光标
Wire
金线
轮
开
Thread
导线管真空开关 Shift 档Wc 线夹开关
Shift+Pan
工
作
台
灯
光
开EFO 打火烧球键
Inx
支
架
输
送
一
单
Shift+IM ↑ 料盒步进一格
Main 接
切
至
主
目
Shift+IM ↓ 料盒步退一格
Shift+IM HM 换左边料盒 Shift+OM ↑ 右料盒步进一格 Shift+O M ↓ 右料盒步退一格 Ed Loop 切换至修改线弧目录 Shift+OM HM 换右边料盒 Chg Cap 换瓷咀
Shift+Clr Tk 清除轨道 Bond 直接进入自动作业画面 Dm Bnd 切线 Del. 删除键 Stop 退出/停止键 Enter 确认键 Shift+Ctct Sr 做瓷咀高度 Ld Pgm 调用焊线程序
二、主菜单(MAIN )介绍:
0.SETUP MENU (设定菜单) 1.TEACH MENU (编程菜单) 2.AUTO BOND (自动焊线) 3.PARAMETER (参数) 4.WIRE PARAMETER (焊线参数) 5.SHOW STATISTICS (显示统计资料)
6.WH MENU (工作台菜单)
7.WH UTILITY (工作台程序)
8.UTILITY (程序)
9.DISK UTILITY (磁盘程序)
三、机台的基本调整
1、编程:
当在磁盘程序〈DISK UTILITIES〉中,无法找到所需适用的程序时,就必须重新建立新的程序,在新编程序之前必须将原用程序清除掉(在MAIN——1.TEACH——5.Delete Program——A——STOP),方可建立新程序。新程序设定是在MAIN——
1.TEACH ——1.Teach Program中进行,其主要步骤如下:(以下以双电极晶片为例做介绍)
①.设置参考点(对点):
MAIN——TEACH——1.Teach program——1.Teach Alignment——Enter——设单晶2个点,双晶3个点——Enter——3.Change lens(把镜头切换到小倍率)——十字光标对准第6颗支架的二焊点(正极柱)——Enter ——对准第1颗支架的二焊点——Enter ——对准芯片的正电极中心——Enter——对芯片的负电极中心
——Enter。在对点设立完毕后,
:
注意:下文中用上下箭头调节亮度时,其中的1234表示(1:threshold阈值,此值不许动2:CDax直射光,3:side 侧光,4:B_cax混合光)其中我们只调整第2和第3项的直射光和侧光即可,做电极PR时需将第2项,即直射光关闭。
十字光标对第六颗支架的二焊点——1.Adjust Image ——按上下箭头调节亮度(1.2.3.4),直到二焊点全白,四周为黑时——Enter ——自动跳至第一颗支架的二焊点——按上下箭头调节亮度(1.2.3.4) 同样到二焊点全白,
(把Graylv1改为Binary)——对晶片的两个电极——1.Adjust Image——按上下箭头调节亮度(1.2.3.4)直至两电极为黑,四周全白时(注意,此时不要按回车)——Stop ——7.PR Load /Search
Mode(把)
·做完PR后需调整范围,具体步骤如下:
在当前菜单下――3.template(模板)确认后――输入11(11表示自定义大小)――Enter――通过上下左右键调整左显示器选择框至范围正好框选两个电极,上下的范围可稍大一点――Enter――0.load Pattern(加入模板)――再次
做负电极的范围,――Enter--通过上下左右键调整左显示器选择框至范围至框选一个半电极,其中负极应该完全框入――Enter――0.load Pattern(加入模板)――此时系统自动跳转至下一界面(自动编线界
面)
③.焊线设定(编线):
在图像对比度设定完毕并选完模板范围后会自动跳转至239.AutoTeach Wire(自动编线)页面,——把十字线对准晶片的
正电极中心——Enter——Enter(完成第一条线的编辑);——
——Enter
(注意,此时不要按回车)——选择2.Change Bond On 并Enter1——按A——按Enter
主界面。
④.复制
主菜单MAIN下——TEACH——2.Step & Repeat(把Nore改为Ahead)――选择1——出现No. of Repeat Rows 1对话框时(表示重复行数)——Enter——出现No of Repeat cols 17’)——对第一颗支架二焊点
——Enter ——对第二颗支架二焊点——Enter ——
Enter——Enter――
⑤.
F1——15——Enter——2002—―Enter―—8.Misc Control ——2.Skip Row/Col/Map——此时显示器的对话框中有三个N0 N0 N0 把第三个的‘N0’改为‘C1’——STOP。
⑥.做瓷咀高度(测量高度)及校准可接受容限(即容差值)
MAIN——3. Parameters——2.Refereme Parameters——Enter——对正极二焊点中心——Enter——Enter——按下箭头选一个晶片——Enter——对晶片电极——Enter——把NO改YES——Enter――F1——Enter——对负极二焊点中心——Enter——STOP。
然后在主菜单MAIN下――3.Parameters――0.Bond Parameter――将0.Align Tolerance L/R 30 1项中的30改为100,1改为5,使0项显示为0.Align Tolerance L/R 100 5
――STOP返回主菜单
⑦.一焊点脱焊侦测功能开关设定
MAIN——4.Wire Parameters——A.Edit Non-Stick Detection ——0.1st Bond Non-stick Deteck ——按F1——按上下箭选‘ODD’——按三次Enter——把‘Y’改为‘N’——STOP返主菜单。
至此编程完毕!
2、校准PR:
PR校正必须在有程序的情况下才能进行,当我们在焊线途中出现搜索失败或PR不良时,有必要重新校正图像对比度(即PR
光校正)。它所包含以下3个步骤:
①.焊点校正(对点):
进入MAIN— 1 .TEACH—4.Edit Program——1.Teach Alignment中针对程序中的每一个点进行对准校正。
②.PR光校正(做光):
焊点校正以后,进入2.Teach 1st PR中对PR光进行校正:即对程序中的每一个点进行黑白对比度的调整。
③.焊线次序和焊位校正:
焊点和PR光校正完毕后,进入9.Auto Teach Wire 中,对程序中的焊线次序和焊线位置进行校正。
3、升降台的调整(料盒部位):
进入MAIN――6.WH MENU――5.Dependent offset――1.Adjust进行调整:
0. 调整步数(数值越大,每次调整的幅度就越大,默认为10)
1.L Y- Elev work 左升降台料盒之Y 方向调整
2.L Z- Elev work 左升降台料盒之Z方向调整
3.R Y- Elev work 右升降台料盒之Y方向调整
4.R Z- Elev work 右升降台料盒之Z方向调整
四、更换材料时调机步骤:
正常换单时,首先了解芯片及支架型号后再按照以下步骤进行调机:
1、调用程序:
进入MAIN——9 Disk Utilities——0. Hard Disk Program——1.Load Bond Program——用上下箭头选择适合机种的程序——Enter——A——Stop 。
2、轨道高度调整:
进入MAIN ——6.WH MENU——0.Setup lead Frame——3.Device Height——A. 利用上下箭头设定轨道高度,以压板刚好压在杯沿下为准(数字越高则轨道越往下降、数字越低则轨道越往上升,02支架一般为2500左右,04支架一般为3600
左右)————Stop。
注意,调整前一定要清除轨道,调整后需上一条支架进行微调。
如图:轨道微调步骤:
压板位置
当进入此项时,左升降台自动复位至预备位,此时左第一料盒的第一轨道应该正对机台轨道入口,且应比机台轨道略高!
MAIN――6.WH MENU――5.Device Dependent offset――1. Adjust――9. Track――A (通过CCD看高度至压板正好压在碗杯下边缘,调整时应先用上下键打开压板,再用左右键调整高度。)
3、支架走位调整:
按Inx键(位置在右键盘最右上方)送一片支架到压板中——在MAIN――6.WH MENU――3.Fine Adjust――1.Adjust Indexer offset――回车后,按左右箭头调节支架位置,要求压板能够刚好将第1、2焊点压紧(上下箭头为压板打开/关闭)——调节完第一个单元后按Enter――按A以继续调节第二个单元(调法同上,只调第一、二个单元,第三个单元会自动计算),保证每个单元走位均匀便OK。同一菜单下的,2和3项为微调。
如图:
右压板
左压板
4、PR编辑(做PR):
进入MAIN――1.Teach――4.Edit program中做1、2、9三项(1项对点、2项做光、9项编线)。
5.测量焊接高度(做瓷嘴高度):
在MAIN――3.PARAMETER――2.Refernce Parameter中,分别做好每个点的焊接高度。
6、焊接参数和线弧的设定:
完成前面5项后,首先焊接一片材料进行首检,再根据材料的实际情况设定焊接相关参数或线弧。
MAIN—4—3项:设定线弧模式,一般用Q型
按键盘Ed Loop键,设定线弧参数。
2.Loop Height(Manu)线弧高度调节;
3.Reverse Height线弧反向高度,
4.ReverseDistance/Angle线弧反向角度调节。
MAIN—3—1项:设定基本焊接参数
具体说明如下:
①.时间、功率、压力设定
进入MAIN――3.Parameters――1.(具体内容忘记记录了)其下属菜单共有九项,后面的参数如有两个值,则前面对应一焊点参数,后面一位对应二焊点参数,这九项内容分别是――
1、contact time(ms)接触时间11
2、contact Power(Dac)接触功率00
3、contact Force(g)接触压力30100
4、Bond Power Delay(ms)焊接功率延时00
5、Bond Time(ms)焊接时间8 10
6、Bond Power(Dac)焊接功率60 110
7、Base Force(g)焊接压力50 100
8、 0 0 9、 80 80
②.温度设定:
进入MAIN ――3.Parameter ――0.Bond parameter ――8.Heater control ――0.Heater setting ――
③.弧度调整:
进入MAIN
――3.parameter ――4(Q)Auto Loop ――5.Engineering Loop Control ――
④.打火高度设定:
进入MAIN ――3.Parameters ――0.Bond parameters ――4.Fire Level 547――(回车后再按A 确认,目测磁嘴和打火杆相对位置,磁嘴应位于打火杆右上方300
到450
左右)
如图:
注:打火高度如不符合第○4项所述,则通过上下键调整磁嘴高度直至完成,回车确认。
⑤.打火参数及金球大小设定:
进入MAIN ――3.Parameters ――0.Bond Parameters ――7.EFO Contol …――0.EFO Parameters 见其附属菜单:
其中第5项为焊下后的球型 第8项为打火后的球型(调整 金球大小一般调第8项)
注:此界面有灰色锁定项,如需改动刚
0. select heater 选择预温或者焊温
1. set Temperature 设定温度 240 deg
1wire size 线径 9 2Gap wide worming V olt 打火电压 4800 3EFO Current(*0.01)打火电流 4000 mA 5.Ball size 金球大小 844 us 6EFO Time 打火时间 25 7Ball Thickness 金球厚度 8 8FAB size 烧球大小 24
1. Group Type 弧型 1 Q
2. Loop Height(Manu 弧高度 18 mil
3. reverse Height 反向高度 28 manu
4. reverse Distance(%)反向距离 70
5. reverse Distance Angle 反向角度 -30
6.
LHT correction/scale OS 弧线松紧 15 0 2 LH 表示弧高度 3 RH 表示反向高度 4 RD 表示反向距离 5 EDA 表示反向角度
注: 2、调整弧形高度,数值越大则越高
3、4、5调整弧形,需配合调整 6、的数值越大则线越松
需在此界面下――按STOP――
1――3即可,再返回刚才所需改
动的页面需――STOP――0
即可看到刚才的灰色锁定项变为可以编辑状态。
五:常见品质异常分析:
1、虚焊、脱焊:
查看时间Time、功率Power、压力Force是否设定正确,预备功率是否过低,搜索压力是否过小或两个焊点是否压紧等。
A.TIME (时间):一般在8-15MS之间。
B.POWER (功率):第一焊点一般45-75之间。
第二焊点一般120-220之间。
C.FORCE (压力):第一焊点一般45-65之间。
第二焊点一般120-220之间。
2、焊球变形:
第二焊点是否焊上或焊接功率是否设得过大,烧球时间或线尾是否
设得过长,支架是否压紧或瓷嘴是否过旧?
3、错焊、位置不当:
焊接程序和PR是否有做好,焊点同步是否设定正确,搜寻(Search)
范围是否设得太大等?
4、球颈撕裂:
检查功率压力是否设得过大,支架是否压紧?或者适当减小接触功率,瓷嘴是否破裂或用得太久?
5、拉力不足:
焊点功率、压力是否设得太大,支架有否压紧,瓷嘴是否已超量使用而过旧?(瓷嘴目标产能双线800K/支)。
六、更换磁嘴:
需在主菜单界面下更换,将扭力扳手放在2公斤力矩下,松开磁嘴定位螺丝,取下磁嘴,左手用镊子将磁嘴放于磁嘴上表面与换能器上表面持平状态,用扭力扳手上丝时应旋转用力,不可前推,换完磁嘴后,校准磁嘴按cha cap键,依提示校准后,再做一下瓷嘴高度(详见三--(一)--6),然后穿线,再按EFO键烧球。进入焊线作业前要进行切线!
七、常见错误讯息:
B13表示无烧球或断线
B3/B5表示PR识别错误,支架PR被拒收.
B4/ B6 表示PR识别错误,晶片PR被拒收.
B8表示第一焊点虚焊或脱焊
B9表示第二焊点虚焊或脱焊
W1 表示搜寻传感器错误或支架位置错误
八、注意事项:
1、温度设定:220℃-250℃之间(一般设定为240℃)
2、在AUTO BOND MENU下必须开启之功能:
(1)ENABLE PR YES
(2)AUTO INDEX YES
(3)BALL DETECT YES
(4)STICK DETECT1 YES
(5)STIEK DETECT2 YES
3、保持轨道清洁,确保送料顺畅。
4、编写程序时应该将温度选项关闭。
注:磁嘴堵塞时,需――F1――输入代码18并确定――输入255并确定――Enter――Enter(此时打开了磁嘴的超声,用镊子轻捋磁嘴,直至超声完毕,依屏幕提示按两次STOP)
最新ASM焊线机操作指导书.pdf
文件编号WI-P-016 生效日期2010-01-20 文件名称 ASM焊线机 操作指导书与保养规范 文件版次A/0 页码第 1 页,共 6 页 1目的:规范生产作业,提高生产效率及产品品质. 2范围:焊线站操作人员. 3职责 3.1设备部:制定及修改此作业指导书. 3.2生产部:按照此作业指导书作业. 3.3品质部:监督生产作业是否按作业指导书之要求作业. 4参考文件 《ihawk自动焊线机操作指导书》 《ihawk自动焊线机保养手册》 5作业内容 5.1开机与机台运行 5.1.1打开机台后面气压开关,用手把焊头移动到压板的中心位置,按下机台前面绿色开 关按钮ON键,机台启动,此时机台各部分进行复位动作. 5.1.2机台各部分动作完成后显示器上面显示BQM的校正信息,按Stop看BQM第二点的 校正信息,再按Stop键退出,等待热板升到设定的温度,开机完毕. 5.1.3装支架:将固有晶片的支架按同一方向摆放在料盒中放在进料电梯上,再拿一个 空料盒放在出料电梯上,检查焊接温度是否达到指定要求。核对已烘烤过的材料,检查 产品型号及前段作业情况,核对流程单时,发现有未签名或未记录的材料退回前段,不 得出现记录不全而继续作业情况. 5.1.4装金线,揭开Wire Spool面盖,然后把金线装在滚轮上,线头(绿色)应从顺时 针方向送出,线尾(红色)应接到滚轮前面的接地端子上. 5.1.5把金线绕过Tensional Bar(线盘)下面,把金线的前端拉直并按THREAD WIRE打 开Air TensionerA(真空拉紧器)之吸气把金线穿过去. 5.1.6按Wclamp键打开线夹并用夹子把金线穿过线夹且把金线拉到焊针前下方(先不用 穿过焊针),然后先关闭线夹用镊子拉直金线并将其切断. 5.1.7用镊子在焊针上方把金线夹紧,然后按Wclamp键打开线夹,把金线拉起穿过焊针 孔直至从焊嘴露出来,松开Wclamp把线夹关上再松开镊子. 5.1.8按一下Dmmybd键,然后把焊头移到PCB位置,再按4把金线切断,用镊子将PCB 上的金线夹掉,装线完成.
KS1488焊线机操作手册
K&S1488焊线机的操作手册 一.功能菜单 1.1参数介绍 1.Tip offset : bond head 在此高度由加速下降转变为匀速下降7 G$ b7 A5 z4 X" T$ r* T9 \3 K 2.Bond velocity : bond head 匀速下降的速度6 x. v: o1 O" q* g/ M1 {5 q1 G3 { 3.Bond time : 打点时USG POWER 作用时间: ~2 J# S! h2 \* Y* a6 \ 4.Bond power : 打点时USG 能量大小 5.Bond force : 打点过程中由Z motor 施加给capillary的力 6.Power profile : USG能量释放形式,例如:方波6 H! ]- M- j9 n# a 7.Ball size : 空气中烧球大小! e" y8 Z; ~' [% t 8.Tail length : 控制线尾长度 9.EFO gap : 打火时capillary 与EFO wand tip之间的垂直距离; @5 v) b I6 W- l' Y 10.Contact threshold : 调整bond head 与工作面接触灵敏度: Z6 ?7 d" k. w! M' @7 F7 a 11.Initial force : USG作用前施加到工作面上的力4 o) q/ a3 x3 C: o) @2 q Force time clocks : 控制Initial force作用的时间 Force RAMP time : Initial force上升时间 12.Ball seat USG bleed : 在Tip位置超声波震动使球处在标capillary正中 https://www.360docs.net/doc/ea14380421.html,G I/V select : USG 能量输出方式* \% Z0 X) M H+ \6 c4 d$ ? https://www.360docs.net/doc/ea14380421.html,G delay clocks : USG 在接触被侦测到以后延迟作用时间/ \5 l! y# w7 E! m% f 15.Capillary offset : lead 上打点位置补偿}+ ]$ N- y$ q& z https://www.360docs.net/doc/ea14380421.html,G bleed : bond head抬起时USG大小 17.RAMP up : bonding过程中能量上升' x: e6 l' T$ h- s7 d! L( m6 b RAMP up : bonding过程中能量下降 Loop height : loop高度调整`% x* e. C0 V' e Delta loop : loop 高度微调7 e3 H+ x2 n# o4 I1 ^$ u 18.Kink height : 控制loop颈部高度7 D9 d* E s7 o) c! t 19.Flat length oop平坦部分长度,仅限于worked trajectory " | ?9 [2 j: c% p 20.Loop factor : 控制放线长度 Loop factor 2 : 控制bond2线的拉紧度 Loop factor3 : Loop平坦部分长度,用于低线弧,会降低速度H1 t. d5 q1 t' p; a% j. f; x Loop factor 4 :线弧成形速度 21.Contact angle : bond2接触角度 22.TOL(ON/OFF) : bond head到达loop最高点行动轨迹 P3 U- R, Y* x4 F7 1.2 菜单介绍; R, W3 p1 W6 p 1. XYZ axis servo calibration : XY gain之差不小于2, 否则要检查电路板; s3 }1 D4 {) r: e g B 2. Inject mode : Normal/Gripper3 ]9 q' z1 z+ D* e Normal模式先感应L/F边沿再抓,适用标准L/F Gripper 模式先将L/F抓过来,再感应L/F边沿抓取,适用短L/F
2011中国LED固晶焊线机企业排名
2011中国LED固晶焊线机企业排名 【高工LED专稿】据高工LED产业研究所(GLII)统计,2009年前国产封装设备占有率不足10%,而到2011年国产封装设备却占有率达到了46%以上,特别是固晶机、分光分选机、测试仪国产设备渗透率达到惊人的地步,有的渗透率达到80%以上,而焊线机由于技术要求较高,研发技术难度较大,目前国产渗透率仍然很低,不足20%,点胶机平均渗透率也只有41%,高端精密点胶机几乎仍依赖进口。中国LED封装设备企业竞争力前10名企业,2011年销售额不一定过亿,但他们却含有技术的沉淀、市场的发展潜力。 经过近几年的发展,中国LED封装设备无论从技术还是从销售额都得到了很大的进步。据高工LED产业研究所(GLII)通过对LED封装设备企业销售额前20名企业研究发现,位于前20名的企业80%以上都有自己的专利或者潜在专利,并且他们的设备在市场都得到很好评价。然而中国LED封装设备市场,国外LED封装企业仍占有一定的比例,目前如焊线机、高端精密点胶机大部分都是依赖进口,还好中国本土LED封装企业近年来通过努力研发自己的设备,并取得了不错的成绩。 高工LED产业研究所(GLII)调查,受2011年LED封装行业增长动力不足影响,中国主要LED固晶焊线企业除少数个别有小幅增长外,其他企业销售额都有较大幅度的下降。 数据范围说明: 企业范围:选择中国本土LED封装设备企业作为排名对象,以外资为主的LED封装设备企业不在研究范围内。
产品范围:选取2011年各企业LED封装固晶、焊线设备销售额,其他包括分光分选、测试仪、点胶机不在本次统计范围内。 分数说明:总分100分。其中销售规模比重70分,技术实力15分,增长率15分。 1. 深圳翠涛自动化设备股份有限公司 深圳翠涛自动化设备股份有限公司,总得分93分,排名第一。成长速度得分13分,单项位居第一。翠涛自动化成立于2005年,其固晶机、焊线机是目前最主要的主打产品。虽然2011年LED封装行业增长动力不足,但翠涛表现突出,取得了较大的增长。翠涛2007年后才在LED领域开始发力,其铝线焊线机是唯一能跟国外品牌抗衡的设备,推出的平面固晶机已被广泛应用,并在业内得到了认可,新开发的金线机也已开始批量销售。2009~2010年LED封装投资高潮,翠涛得到了长足发展。他们是除进口设备外不错的选择。2011年,翠涛荣获高工LED颁发的LED界的“奥斯卡”奖项——“本土最具发展潜力企业奖”。 2. 佑光器材-先进光电(深圳)有限公司 先进光电器材(深圳)有限公司,总得分90分,排名第二。其中技术得分是13分,单项均排名第一。先进光电器材成立于2007年,专注于LED固晶机、焊线机生产、销售。佑光LED固晶机在行业内的名气虽不怎么响亮,但其生产的焊线机在业内得到大家的认可,无论从技术还是稳定性方面都可以和ASM等进口设备一较高低。佑光自2008年开始销售固晶焊线机,其市场份额不断扩大,在中国国内市场中与翠涛、新益昌共并前三甲。 3. 深圳市新益昌自动化设备有限公司 深圳市新益昌自动化设备有限公司,总得分87分,排名第三。新益昌自动化设备有限公司成立于1998年,是一家致力于制造电子元器件周边设备的研发、生产、销售及服务于一体的综合性企业,在业内有较大的名气。新益昌可以说是国内LED封装企业中较老牌企业,其固晶机为中国LED封装业做出了不少贡献,业内也是非常认可其设备的,2009~2010年LED封装的投资高潮让新益昌收益匪浅,只是留给LED封装业遗憾的是新益昌的焊线机何时能如其固晶机一样快刀斩乱麻进入市场呢。 4. 深圳市大族光电设备有限公司 深圳市大族光电设备有限公司,总得分85分,排名第四位。大族光电主要生产"HAN'S"系列高速平面固晶机、高速全自动焊线机、SMD LED分光分色测试及装带设备。大族光电依靠上市公司背景在销售渠道方面和资金都有较强的实力,2008年其固晶设备在封装厂正式试用,但其技术与稳定仍不如别人,被迫推迟推出市场。后经技术改进,设备稳定性得以快速提升,在2010年LED封装设备竞争中占据了一定份额,只因2011年市场经济不景气及本身价格相对于其他较高,销售额有所降低。 5. 深圳市伟天星半导体设备有限公司 深圳市伟天星半导体设备,总得分80分,排名第五位。成立于2000年,厂房面积达到1500
自动焊线机操作规范指导书
自动焊线机操作规范指导书 文件版本: 一、键盘介绍: 1.WIRE FEED(进线)按钮 - 当按下该按钮时,线轴旋转进线。 2.TENSIONER(张紧器)按钮–当按下该按钮可将真空装置设为焊线张紧器 打开或关闭。当真空装置处于焊线张紧器打开时,TENSIONER 指示灯状态是亮起的。 3.AIR GUIDE(导气)按钮–按下该按钮可将气压设为导气打开或关闭。当气 压处于导气打开时,AIR GUIDE(指示灯状态的是亮起的。 4. ESCAPE (退出)按钮–在系统菜单中ESCAPE键是退出当前菜单,出现 对话框,按ESCAPE键-相当于按“取消”键,激活返回功能。 5 .TAB键–在数据输入区之间移动光标。如果对话框包含多页,可以用上/ 下TAB键来翻页。 数字键和字母键 - 用作从模式栏进行选择或者激活对话框中操 作模式的“热键”。数字键也被用来向数据输入区输入操作数据 或者参数值。字母则由字母键输入。可使用零键代替对话框中的 完成或下一步按钮。 6.SHIFT - [SHIFT]+[ESCAPE]从所有菜单树种退出,直接回到模式栏。 [SHIFT]+[MINUS/DECIMAL POINT]按住[SHIFT]同时按住 [Minus/decimal point]键生成减号(-) [SHIFT]+[F#]选择相应的上层功能按钮。 7. ENTER - 在数据输入区输入数据后,按下[ENTER]键将该数据记录到焊
接机存储器中。如果某特定菜单通过方框突出显示,按下[ENTER] 键即选择该项目。 8.MOTOR STOP -(马达停止) 当选定后,将禁用所有伺服电机。该功能不会 切断电路板或者电力供应的电源。焊接机和MHS操作停止。焊接 机进入待机模式,显示待机模式对话框。必须按下该按键的两个 开关,才能激活MOTOR STOP (参见图2-2)。 9.RUN/STOP–(运行/停止) 启用或禁用机器操作。当机器处于自动模式时, 该键的等亮起。在自动模式下,按下该键将启用顺序停止模式。 该键只可在自动和和停止模式下操作。 10.INDEX - (步进) 指示MHS执行一个步进周期。该功能是否有效取决于焊 接机的状态。 11.AUTO INDEX-(自动步进) 指示MHS在焊接每个器件之后步进,仅在自动模 式中有效。 12.鼠标/鼠标键–鼠标的基本功能是在屏幕上移动指针和光标。鼠标分别 有三个键:左键B1、中键B2、右键B3。按下B2,可以控制工 作台X和Y轴方向的移动(定位)。在不同操作界面它们所代 表的功能也有区别。在操作期间,显示器的信息框会指示在当 前的操作界面三个键代表的功能和定义。(如图2-3) 二、屏幕的主要元素及含义:
自动电焊机操作说明书
自动电焊机操作说明书 一、安全须知 1、本设备要求操作人员应有熟练的焊接操作技术及一定程度的电工安全知识,所有作业必须接受专业培训后进行。 2、必须熟悉设备的“操作”和“急停”按钮的位置,了解焊机的功能及相关的安全预防措施。 3、操作人员操作前必须认真阅读使用说明书,按程序操作,非操作人员不得擅自开机操作。 4、操作人员必须佩带人体安全预防用品,如安全帽、护目镜、防火衣,安全手套等。 5、不得穿戴宽松衣服操作,不得使用披肩、手镯等物品,以免带来隐患。 6、本机要有标准的安全接地,操作人员应与大地和工件绝缘。 7、保证焊接回路安全可靠。 8、本机焊接时有强光并伴有烟气出现,烟气有害健康,工作场地应有通风,排气设备。 9、焊接地的飞溅会引起火灾,因此工作场地不能有易燃物品。 10、设备运行时不能对设备加注润滑油和维护。 11、定期检查螺栓连接部位,防止松动,悬空部件下面严禁站人。 12、电气柜、焊接电源等带强电部位,通电工作时,不得违规操作和接触,以防止触电。 13、非具有专业资格的人员不得维修和改动本设备。 14、操作和维修时操作人员需要登高时,务必注意安全。登高作业时,必须登梯上下,并应检查及固定好梯子,严禁悬空攀爬跳跃,防止跌下摔伤。 二、操作和使用 1、根据焊接的材质,厚度,选用焊丝及保护气体来确定焊机的程序,在焊机电源上
设定。 2、根据工艺要求,接好混合气体并调整好气体流量。 3、开启空压机开关,使空压机工作。 4、将电器箱上的电源开关合上,电源接通,电源指示灯亮。 5、在操控盒上按对应的按钮,检测龙门架移动,行走台车左右移动,拖板升降、气缸伸缩等,注意限位开关是否正常工作,若发现有任何一路发生卡阻及异常情况,要立即使用急停按钮,切断电源,使所有的接触器都处于断路状态,然后维修,确保人身安全。 6、将操控箱面板上的状态开关至调试位,提升焊枪,跟踪器立柱和拖板至合适位置(以焊枪、跟踪器气缸下放时不碰到焊接工件稍高一些为准),选择好机头移动方向;根据工艺要求,使用速度调节旋钮,调整好机头移动速度,即焊接速度;根据工件位置,选择门架前或后移动,下放焊枪、跟踪器气缸,注意焊枪跟踪器不会碰工件。 7、将开关置焊接状态,焊枪前端焊缝跟踪器探头自动找焊缝,找到最合适的位置时,给出信号,由cpu控制plc发出焊接启动信号,气体保护焊机开始焊接,当焊机开始焊接的同时,横梁小车按照预设置的方向及速度开始行走,当焊接快到结束位置时,跟踪停止,继续自动焊接直到结束位置时,按停止键焊接结束,再逐一停止气保焊机,横梁小车行走电机。 8、断弧保护,在焊接过程中出现断弧(堵丝,缺丝,焊机故障等),控制系统会检测这些不良信息,可以使焊接自动中断由人工排除故障后重新启动。 9、焊机在作各种功能的运行时不得出现抖动,停顿或异常声响,如有应立即停车,检查排除故障。 10、设备使用完毕后,将焊接头移至合适位置,然后切断电影。 三、维护保养及注意事项 1、每台设备必须接地线,以保障安全。 2、当设备发生故障时,应立即切断电源,然后进行检查维修,方可继续使用。 3、定期检查各直线导轨、滑块。涡轮蜗杆减速机,齿轮减速机,齿轮、齿条等传动部件,并加注润滑油或润滑脂。 4、使用前对行走轮轴承,直线导轨滑块,升降及焊接机头移动部件的齿轮、齿条,焊接机头外的手动调节机构部件检查润滑情况。 5、发现传动机构有不正常现象,如振动、异常声响,卡阻等,应立即停止使用,检
ASM自动焊线机培训
A S M自动焊线机培训 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
自动焊线机培训目录
一、键盘功能简介: 1
2、常用按键 功能简介: 数字0—9 进行数据组合之输入 移动菜单上下左右之光标 Wire Feed 金线轮开关 Thread Wire 导线管真空开关 Shift 上档键 Wc Lmp 线夹开关 Shift+Pan Lgt 工作台灯光开关 EFO 打火烧球键 Inx 支架输送一单元 Shift+IM ↑ 左料盒步进一格 Main 直接切至主目录 Shift+IM ↓ 左料盒步退一格 Shift+IM HM 换左边料盒 Shift+OM ↑ 右料盒步进一格 Shift+O M ↓ 右料盒步退一格 Ed Loop 切换至修改线弧目录 Shift+OM HM 换右边料盒 Chg Cap 换瓷咀 Shift+Clr Tk 清除轨道 Bond 直接进入自动作业画面 Dm Bnd 切线 Del. 删除键 Stop 退出/停止键 Enter 确认键 Shift+Ctct Sr 做瓷咀高度 Ld Pgm 调用焊线程序 二、主菜单(MAIN )介绍: 0.SETUP MENU (设定菜单) 1.TEACH MENU (编程菜单) 2.AUTO BOND (自动焊线) 3.PARAMETER (参数) 4.WIRE PARAMETER (焊线参数) 5.SHOW STATISTICS (显示统计资料) 6.WH MENU (工作台菜单) 7.WH UTILITY (工作台程序) 8.UTILITY (程序) 9.DISK UTILITY (磁盘程序) 三、机台的基本调整 1、编程:
数控全自动钢筋桁架焊接生产线使用说明书
1.前言 关于《数控全自动钢筋桁架焊接生产线使用说明书》的说明:1.1《数控全自动钢筋桁架焊接生产线使用说明书》(以下简称《说 明书》)将向用户介绍桁架成型机的基本结构和工作原理, 使用户对桁架成型机有一个基本了解。 1.2《说明书》详细讲述了桁架成型机的操作方法,帮助用户尽 快掌握操作要领和步骤。 1.3《说明书》介绍了桁架成型机的参数、加工工艺等。 1.4《说明书》中包含了必要的安全要求,应仔细阅读。 1.5操作人员在操作之前,请仔细阅读《说明书》,并注意安全 说明和建议。完全理解《说明书》的内容,以确保安全和充 分发挥机器的性能。 1.6不适当的操作可能会导致机器损坏和对操作人员的伤害。 1.7用户必须保证指定的操作人员阅读和完全理解《说明书》的 内容,并且按照《说明书》进行定期维护。 1.8供货范围 1.8.1放线架一套 1.8.2矫直送丝机构一套 1.8.3储料架一套 1.8.4弯曲成型机构一套 1.8.5焊接机构一套
1.8.6底脚折弯机构一套 1.8.7步进牵引机构一套 1.8.8剪切机构一套 1.8.9集料架一套 1.8.10电控柜一组 1.8.11操作台一个 1.8.12工具和配件(工具箱一个,工具包括:钳子1把、12'' 活扳手1把、内六角扳手1套、一字改锥1把、十字改锥1把、黄油枪1把、皮榔头1把等) 1.9服务条款 1.9.1长期负责桁架成型机的技术服务。 1.9.2负责培训操作、维修人员(理论知识和实践操作) 1.9.3提供相关技术改进和指导。
2.概述 数控全自动钢筋桁架焊接生产线是天津市建科机械制造有限公司开发的,用于高速铁路轨枕和建筑用桁架的专用成型设备,该机将放线、矫直、弯曲成型、焊接、折弯等一次完成,具有焊接质量好,速度高,工人劳动强度小,生产效率高的特点。
ASM焊线机操作指导书课件
1目的:规范生产作业,提高生产效率及产品品质. 2范围:焊线站操作人员. 3职责 3.1设备部:制定及修改此作业指导书. 3.2生产部:按照此作业指导书作业. 3.3品质部:监督生产作业是否按作业指导书之要求作业. 4参考文件 《ihawk自动焊线机操作指导书》 《ihawk自动焊线机保养手册》 5作业内容 5.1开机与机台运行 5.1.1打开机台后面气压开关,用手把焊头移动到压板的中心位置,按下机台前面绿色开 关按钮ON键,机台启动,此时机台各部分进行复位动作. 5.1.2机台各部分动作完成后显示器上面显示BQM的校正信息,按Stop看BQM第二点的 校正信息,再按Stop键退出,等待热板升到设定的温度,开机完毕. 5.1.3装支架:将固有晶片的支架按同一方向摆放在料盒中放在进料电梯上,再拿一个 空料盒放在出料电梯上,检查焊接温度是否达到指定要求。核对已烘烤过的材料,检查 产品型号及前段作业情况,核对流程单时,发现有未签名或未记录的材料退回前段,不 得出现记录不全而继续作业情况. 5.1.4装金线,揭开Wire Spool面盖,然后把金线装在滚轮上,线头(绿色)应从顺时 针方向送出,线尾(红色)应接到滚轮前面的接地端子上. 5.1.5把金线绕过Tensional Bar(线盘)下面,把金线的前端拉直并按THREAD WIRE打 开Air TensionerA(真空拉紧器)之吸气把金线穿过去. 5.1.6按Wclamp键打开线夹并用夹子把金线穿过线夹且把金线拉到焊针前下方(先不用 穿过焊针),然后先关闭线夹用镊子拉直金线并将其切断. 5.1.7用镊子在焊针上方把金线夹紧,然后按Wclamp键打开线夹,把金线拉起穿过焊针 孔直至从焊嘴露出来,松开Wclamp把线夹关上再松开镊子. 5.1.8按一下Dmmybd键,然后把焊头移到PCB位置,再按4把金线切断,用镊子将PCB 上的金线夹掉,装线完成.
晶片焊线机视觉检测算法研究
晶片焊线机视觉检测算法研究 段锦,景文博,祝勇,路健 (长春理工大学电子信息工程学院,长春130022) 摘要:全自动晶片焊线机是晶片生产的关键设备之一,其视觉检测系统是设备的核心技术所在。视觉检测技术直接影响晶片检测定位精度和焊接机的工作效率。分析了晶片检测原理和方法,研究了基于图像处理技术的晶片检测和定位算法,着重讨论了灰度模板匹配和二值模板匹配的方法。实验表明,系统在速度和精度上都可满足焊线生产的需求。 关键词:视觉检测;图像处理;模板匹配;晶片检测定位;自动焊线机 中图分类号:T N391141 文献标识码:A 文章编号:10032353X(2009)0720641204 Study on the Algorithms of Vision Detection of Automatic Chip Wire Bonder Duan Jin,Jing Wenbo,Zhu Y ong,Lu Jian (School o f Electronic Information&Engineering,Changchun Univer sity o f Science&Technology,Changchun130022,China) Abstract:T he autom atic chip w ire b onder is one of the prim ary equipm ents for chip pr oduction.T he m achine vision system is very crucial in the pr ocess of w ire2b onding.T he princeple of the chip detection was analy zed,and the alg orithms of detection and location based on im age pr ocessing ten ology were presented.T he m atching alg orithms were discussed em phatically in the gray image tem plate and the binary image tem plate. The speed and accuracy of the alg orithms are g ood enough to meet the practical application requirement. K ey w ords:vision detection;image processing;tem plate matching;chip detection location; automatic wire bonder EEACC:6140M;0290 0 引言 半导体制造后工序中的引线键合设备在集成电路制造中是必不可少的。国内已能自主生产超声波金丝球焊接机和超声波铝丝焊接机等设备,但产品生产还停留在一人一机的半自动水平。对于工件上每块芯片的焊接,均须人工干预,生产效率较低;由于人工操作,产品的合格率也受到影响,只有实现自动化焊接才能大规模提高产品的产量和质量。 在国外,视觉检测系统已经广泛应用于PC B 板和芯片缺陷的视觉检测:Z.Ibrahim等人[1]提出了基于小波变换的印刷电路板检查系统; E.C. Ralph等人[2]提出了一种颜色分割、直方图和模板匹配的自动视觉检测方法,P.Athanas等人[3]通过实践提出了一种可行的晶圆机器视觉方法。 国内在这方面的研究滞后于国外,但随着国内机器视觉市场的兴起以及半导体行业的发展,已经有不少企业和高校科研机构在开展这方面的研究,取得了一定的成果。郭强生等人[4]利用图像处理和模式识别技术,完成了待检测芯片的定位与墨点、缺角、崩边、角度偏移等芯片缺陷的检测;邓秀娟等人[5]利用轮廓提取方法,提出了一种适合于机器人视觉的图像模式识别算法,提高了对象位置精度;梁伟文等人[6]对视觉定位系统的高精度多功能贴片机系统进行了研究。 本文将重点阐述基于图像处理的晶片测量方法 封装、测试与设备 Package,T est and Equipment doi:1013969/j1issn110032353x12009107106
全自动焊机客户焊接说明书
全自动焊机客户焊接说 明书 Revised by Chen Zhen in 2021
全自动焊机 使用说明书 DMCS全自动多轴控制系统 (复杂5轴5联动/复杂4轴4联动焊接专用) 用户手册 感谢您选择本公司的产品! 本手册对DMCS全自动焊接控制系统的使用做了详细的介绍,包括系统特性、部件操作、编程及加工说明等。在使用本控制系统及相关的设备之前,请您详细阅读本手册。这将有助于您更好地使用它。由于软件的不断更新,您所收到的产品在某些方面可能与本手册的陈述有所出入。在此谨表歉意。 目录
1. 概述 DMCS 系列连续轨迹运动控制器是针对需要高速高精度连续轨迹运动场合自主开发 的一类经济型运动控制器。该卡采用高性能DSP 和FPGA 技术,可实现5轴联动或5轴的连续轨迹插补运动,通过路径示教的方式编辑程序文件,下载到控制卡后, 控制卡可自动执行程序文件,完成工件加工。可应用在对精度及速度有较高要求的轮廓 控制设备上,如焊接机、点胶机、雕刻机、雕铣机、切割机、裁剪机、数控机床等。 1.1.控制卡规格
. 教导手柄规格
. 屏幕显示说明 如下图示: 开机画面 加工参数界面 标题栏 用于标识该屏幕的主要内容。在后续表述中,使用标题栏上的文字代表该界面信息, 如加工参数界面即对应加工参数屏幕。 按钮 用于对应键盘上的按钮。如“〈F1〉保存参数”表示在《加工参数》下按示教盒面
板上的〈F1〉键即可保存参数。当下文提示按键“〈切换〉+〈××〉”键时,如“〈切 换〉+〈8〉”则表示先按下〈切换〉键,然后按〈8〉键,使用〈8〉键的第二功能。 输入框 用于输入数字或字符。如果该参数带有单位,则输入框后紧跟该参数的单位。. 组合快捷键一览表
ASM自动焊线机(ihawk)
ASM 自动焊线机简介目录 一、键盘功能简介:2 1、键盘位置22、常用按键功能简介2 二、主菜单(MAIN)介绍:3 三、机台的基本调整:3 1、编程3 ①.设置参考点(对点)3 ②.图像黑白对比度(做PR)4 ③.焊线设定(编线)4 ④.复制5 ⑤.设定跳过的点5 ⑥.做瓷嘴高度(测量高度)及校准可接受容限(容差值)5 ⑦.一焊点脱焊侦测功能开关设定5 2、校准PR6 ①.焊点校正(对点)6 ②.PR光校正(做光)6 ③.焊线次序和焊位校正6 3、升降台的调整(料盒部位)6四、更换材料时调机步骤:6 1、调用程序62、轨道高度调整73、支架走位调整74、PR编辑(做PR)85、测量焊接高度(做瓷嘴高度)86、焊接参数和线弧的设定8 ①.时间、功率、压力设定8 ②.温度设定8 ③.弧度调整9 ④.打火高度设定9 ⑤.打火参数及金球大小设定9 五、常见品质异常分析:10 1、虚焊、脱焊10 2、焊球变形10 3、错焊、位置不当10 4、球颈撕裂10 5、拉力不足10 六、更换磁嘴:10 七、常见错误讯息:10 八、注意事项11
一、键盘功能简介: 1、键盘位置: Wire Feed 2、常用按键功能简介: 数字0—进行数据组合之输移动菜单上下左右之光标 Wire 金 线 轮 开 Thread 导线管真空开关 Shift 档Wc 线夹开关 Shift+Pan 工 作 台 灯 光 开EFO 火烧球键 Inx 支 架 输 送 一 单 Shift+IM ↑ 料盒步进一格 Main 接 切 至 主 目 Shift+IM ↓ 料盒步退一格 Shift+IM HM 换左边料盒 Shift+OM ↑ 右料盒步进一格 Shift+OM ↓ 右料盒步退一格 Ed Loop 切换至修改线弧目录 Shift+OM HM 换右边料盒 Chg Cap 换瓷咀 Shift+Clr Tk 清除轨道 Bond 直接进入自动作业画面 Dm Bnd 切线 Del. 删除键 Stop 退出/停止键 Enter 确认键 Shift+Ctct Sr 做瓷咀高度 Ld Pgm 调用焊线程序 二、主菜单(MAIN )介绍: 0.SETUP MENU (设定菜单) 1.TEACH MENU (编程菜单) 2.AUTO BOND (自动焊线) 3.PARAMETER (参数)
2011中国LED固晶焊线机企业排名
2011中国LED固晶焊线机企业排名 2009年前国产封装设备占有率不足10%,而到2011年国产封装设备却占有率达到了46%以上,特别是固晶机、分光分选机、测试仪国产设备渗透率达到惊人的地步,有的渗透率达到80%以上,而焊线机由于技术要求较高,研发技术难度较大,目前国产渗透率仍然很低,不足20%,点胶机平均渗透率也只有41%,高端精密点胶机几乎仍依赖进口。中国LED封装设备企业竞争力前10名企业,2011年销售额不一定过亿,但他们却含有技术的沉淀、市场的发展潜力。 经过近几年的发展,中国LED封装设备无论从技术还是从销售额都得到了很大的进步。据高工LED产业研究所(GLII)通过对LED封装设备企业销售额前20名企业研究发现,位于前20名的企业80%以上都有自己的专利或者潜在专利,并
且他们的设备在市场都得到很好评价。然而中国LED封装设备市场,国外LED封装企业仍占有一定的比例,目前如焊线机、高端精密点胶机大部分都是依赖进口,还好中国本土LED封装企业近年来通过努力研发自己的设备,并取得了不错的成绩。 高工LED产业研究所(GLII)调查,受2011年LED封装行业增长动力不足影响,中国主要LED固晶焊线企业除少数个别有小幅增长外,其他企业销售额都有较大幅度的下降。 数据范围说明: 企业范围:选择中国本土LED封装设备企业作为排名对象,以外资为主的LED封装设备企业不在研究范围内。 产品范围:选取2011年各企业LED封装固晶、焊线设备销售额,其他包括分光分选、测试仪、点胶机不在本次统计范围内。 分数说明:总分100分。其中销售规模比重70分,技术实力15分,增长率15分。 1. 深圳翠涛自动化设备股份有限公司 深圳翠涛自动化设备股份有限公司,总得分93分,排名第一。成长速度得分13分,单项位居第一。翠涛自动化成立
ASM焊线机操作指导书(word版)
ASM焊线机操作指导书 Through the process agreement to achieve a unified action policy for different people, so as to coordinate action, reduce blindness, and make the work orderly. 编制:___________________ 日期:___________________
ASM焊线机操作指导书 温馨提示:该文件为本公司员工进行生产和各项管理工作共同的技术依据,通过对具体的工作环节进行规范、约束,以确保生产、管理活动的正常、有序、优质进行。 本文档可根据实际情况进行修改和使用。 1 目的:规范生产作业, 提高生产效率及产品品质. 2 范围:SMD焊线站操作人员. 3 职责 3.1 设备部:制定及修改此作业指导书. 3.2 生产部:按照此作业指导书作业. 3.3 品质部:监督生产作业是否按作业指导书之要求作业. 4 参考文件 《ihawk自动焊线机操作指导书》 《ihawk自动焊线机保养手册》 5 作业内容 5.1 开机与机台运行 5.1.1 打开机台后面气压开关, 用手把焊头移动到压板的中心位置, 按下机台前面绿色开关按钮ON键, 机台启动, 此时机台各部分进行复位动作. 5.1.2 机台各部分动作完成后显示器上面显示BQM的校正信息, 按Stop 看BQM第二点的校正信息, 再按Stop键退出, 等待热板升到设定的温度, 开机
完毕. 5.1.3 装支架:将固有晶片的支架按同一方向摆放在料盒中放在进料电梯上, 再拿一个空料盒放在出料电梯上, 检查焊接温度是否达到指定要求。核对已烘烤过的材料, 检查产品型号及前段作业情况, 核对流程单时, 发现有未签名或未记录的材料退回前段, 不得出现记录不全而继续作业情况. 5.1.4 装金线, 揭开Wire Spool面盖, 然后把金线装在滚轮上, 线头(绿色)应从顺时针方向送出, 线尾(红色)应接到滚轮前面的接地端子上. 5.1.5 把金线绕过Tensional Bar(线盘)下面, 把金线的前端拉直并按THREAD WIRE打开Air TensionerA(真空拉紧器)之吸气把金线穿过去. 5.1.6 按Wclamp键打开线夹并用夹子把金线穿过线夹且把金线拉到焊针前下方(先不用穿过焊针), 然后先关闭线夹用镊子拉直金线并将其切断. 5.1.7 用镊子在焊针上方把金线夹紧, 然后按Wclamp键打开线夹, 把金线拉起穿过焊针孔直至从焊嘴露出来, 松开Wclamp把线夹关上再松开镊子. 5.1.8 按一下Dmmybd键, 然后把焊头移到PCB位置, 再按4把金线切断, 用镊子将PCB上的金线夹掉, 装线完成. 5.1.9 测量焊针高度:按Inx键出现Sure to index LF?再按A键将材料送到焊线区, 进入主菜单parameter再进入Reference Parameter测量PCB(Lead)和晶片(Die)和高度. 5.1.10在Auto菜单中选择1 start single bond 按Enter搜索PR, 等搜索完PR 停下来时按1焊一根线看是否正常, 按0开始自动焊线作业.
ASM自动焊线机培训
自动焊线机培训目录一、键盘功能简介:
2、常用按键功能简介: 数字0—9 进行数据组合之输入移动菜单上下左右之光标 Wire Feed 金线轮开关Thread Wire 导线管真空开关
Shift 上档键 Wc Lmp 线夹开关 Shift+Pan Lgt 工作台灯光开关 EFO 打火烧球键 Inx 支架输送一单元 Shift+IM↑左料盒步进一格 Main 直接切至主目录 Shift+IM↓左料盒步退一格 Shift+IM HM 换左边料盒 Shift+OM↑右料盒步进一格 Shift+OM↓右料盒步退一格 Ed Loop 切换至修改线弧目录 Shift+OM HM 换右边料盒 Chg Cap 换瓷咀 Shift+Clr Tk 清除轨道 Bond 直接进入自动作业画面 Dm Bnd 切线 Del. 删除键 Stop 退出/停止键 Enter 确认键 Shift+Ctct Sr 做瓷咀高度 Ld Pgm 调用焊线程序
二、主菜单(MAIN)介绍: 0.SETUP MENU (设定菜单)Array 1.TEACH MENU (编程菜单) 2.AUTO BOND (自动焊线) 3.PARAMETER (参数) 4.WIRE PARAMETER (焊线参数) 5.SHOW STATISTICS (显示统计资料) 6.WH MENU (工作台菜单) 7.WH UTILITY (工作台程序) 8.UTILITY (程序) 9.DISK UTILITY (磁盘程序) 三、机台的基本调整 1、编程: 当在磁盘程序〈DISK UTILITIES〉中,无法找到所需适用的程 序时,就必须重新建立新的程序,在新编程序之前必须将原用程序清 除掉(在MAIN——1.TEACH——5.Delete Program——A——STOP), 方可建立新程序。新程序设定是在MAIN——1.TEACH ——1.Teach Program中进行,其主要步骤如下: ①.设置参考点(对点): MAIN ——TEACH ——1.Teach program ——1.Teach Alignment ——Enter
ASM EAGLE自动焊线机基本培训
焊线机培训 打开线夹烧球步进支架 更换左料盒更换右料盒 一、基本操作: 1、穿线:用镊子镊住长约1.5厘米的金线,左手按“线夹打开”键,将金线穿过瓷嘴,能看到金线从瓷 嘴尖部穿出,再用镊子将瓷嘴尖部的金线拉出约0.3厘米后向右弯,同时看瓷嘴上端的金线是否在线夹内,如不在,用镊子将金线镊到线夹内 2、烧球A:在正常焊线时,在AUTO BOND菜单下,按4出现“Choose a pt Press Key 4 ”提示,通过 移动操作球将十字线移到支架管腿平台处,再按下4进行自动烧球 B:如机器还没调好,轨道下还没有支架,可按穿线的方式将金线穿出瓷嘴尖一点点(能看到伸
出瓷嘴尖即可),按“烧球”键进行人工烧球 3、步进支架:按“步进支架”键,将左料盒内的支架步进一根进入焊线区域(如按下“步进支架”键后, 出现Sure to index LF提示,则需要再按下“A”键) 4、步进、更换料盒:更换左右料盒,可左手按“Shift”,右手按“IM Hm”更换左边料盒,(右手按“OM Hm“则是更换右料盒)。左手按“Shift”,右手按“IM ”则是将左料盒向前移一格,左手按“Shift”,右手按“IM ”则是将左料盒向前移一格;左手按“Shift”,右手按“OM ”则是将料盒向后退一格,左手按“Shift”,右手按“OM ”则是将左料盒向后退一格 二、编程: 1、换压板:按不同的支架更换不同的压板(压板分2pin 、3Φ3pin 、5Φ3pin三种),一般两条腿支架用 2pin压板,2009支架用5Φ3pin压板,其它三条支架用3Φ3pin压板 2、调轨道高度:进6.WH Menu中,选5.Sevice 中的2.Device Offset 中的1.Adjust,对Track进行调 整,确保支架碗杯底部略高于压板 3、调步进:步进一根支架,进6.WH Menu中的3.Fine Adjust 中1.Adjust Indexer Offset,用上下键 打开或关闭压板,左右键向左或向右移动支架,使支架腕杯底部与管腿分别压在压板的两个压爪上4、找参考点:步进调好后,步进一根支架在轨道,进入2.TEACH菜单中选将当前程焊线程序删除,然后 进入4. Edit Program中的1. Teach Alignment,按提示分别选压板所压的7颗支架的第6颗支架管腿和第1颗支架管腿(从右向左数)作为管腿参考点,同时再选第1颗晶片作为晶片参考点(注意:选管腿时可将管腿移到十字线的左上、左下、右上、右下都可以,而选晶片时必须将十字线对准晶片PAD中心) 5、做PR:从刚才选定参考点的菜单退出,进入1.Teach 1st PR菜单中0.Load PR Pattern,分别按提示对 管腿和晶片做PR,其中管腿PR采用黑白模式(Binay),晶片PR采用灰度模式(Gray Level) 6、写线:退出PR菜单,进入9.Auto Teach Wire,将4.PR Support Mode改为None,移动操纵球,将 十字线对准晶片PAD中心,按“ENTER”移动操纵球,再将十字线对准管腿中心按ENTER 7、修改焊线模式:退出写线菜单,进入Teach菜单中的2.Step&Repeat,将None改为HybRev(HybRev 为先找一遍晶片再焊线,如改为Ahead则为边找边焊),按提示移动到支架最右边管腿,可将管腿移到十字线左上,按“ENTER”,再按提示移到右边第二个管腿(位置与第一个相同),按“ENTER”,此时机器会自动转到第七颗,移动使其与第一个管腿所对的位置相同。按F15,进入Misc Control菜单,选Skip Row/Col,将第三组的“N 0”改为“C 1”(此功能是支架步进到第三个单元时,将空的第七颗跳过) 8、测高、修改参数:穿好线,进行主菜单4.PARAM中的2.Refernce Parmeter分别对管腿、晶片进行 测高, Ctact Level(接触高度)Srch ht(搜索高度)Aln no(参考点数量)Ref Type(类型)
自动焊线机eagle60培训教材
自动焊线机(EAGLE-60)培训教材 培训目的: 让设备操作人员掌握正确的设备操作方法,以提升产品质量及生产效率。 培训对象: 自动焊线机操作人员。 培训设备型号: EAGLE-60 培训内容: 一、开机: 1、先开气、再开电源(气压4-6Kg/cm2,电压220V); 2、打开显示器电源开关 3、电源打开后,机台系统进行自检,送料马达搜索原位,大约5分钟 后 自检完毕,按ENTER键进入待机状态。 二、程序设定: 2.1 启动机器,进入主菜单"Teach"项,选择第5项"Delete program", 按"Enter"键,提示"Sure to delete program?",按A键,刪除程序, 显示"Reset parameter windows?",按"stop"键退出(如按A键,则 所有参数将变更)。 2.2 进入主菜单第3项"Teach program",选择第1项"Teach Align ment",按Enter键显示"pairs of align point2",按"Enter"键确认,左屏幕显示"Dieo 1 lead"滚动操作球,将焊头移至左侧第6 个支架单元左上角位置,按enter键输入第1个支架对点,将焊头 移至右侧第1个支架单元右上角位置,按Enter键确认. 2.3 显示"Die 1 Die"移动焊头至第1个Die位置处,使屏幕十字线 与晶片电极中心对准,按Enter键2次,输入2个对点;焊头自动跳 至第6个支架单元处,要求做支架2nd焊点PR识別,右屏幕显示 裝载PR菜单,其中第6项"PR Lead/search mode选择PR识別模 式,Binary/Greylvl為黑白与灰度识别常用模式,根据需要进行 选择使用.键盘数字键:2=coax , 3=side , 4=Bcoax,分別调节同 轴光,侧光及同轴蓝光,1=Threshold调节图象黑白对比度,按一 次方向键,增加光亮速度调整;图象调节以清晰为准,按Enter键 装载,同理装载晶片PR. 2.4 显示"NO.of wire 300"输入"1"条线,按Enter键,选择第4项PR support mode将"Both"改为"none",选择0项"Get Bond point",移动操作球,使十字线与晶片电极中心对准,按Enter键一次,输入 第1st焊点位置;移动焊动至第2nd焊点焊的位置,按Enter确认之后连续4次退出至主画面,选择第2项step/Repeat,将