PLL之相位噪声
【重要】锁相环的相位噪声分析
锁相环路相位噪声分析 张文军 电信0802 【摘要】本文对锁相电路的相位噪声进行了论述,并对其中各组成部件的相位噪声也做了较为详细的分析。文中最后提出了改进锁相环相位噪声的办法。 【关键词】锁相环;相位噪声;分析 引言 相位噪声是一项非常重要的性能指标,它对电子设备和电子系统的影响很大,从频域看它分布的载波信号两旁按幂律谱分布。用这种信号无论做发射激励信号,还是接收机本振信号以及各种频率基准,这些信号在解调过程中都会和信号一样出现在解调终端,引起基带信噪比下降。在通信系统中使环路信噪比下将,误码率增加;在雷达系统中影响目标的分辨能力,即改善因子。接收机本振的相位噪声遇到强干扰信号时,会产生“倒混频”,使接收机有效噪声系数增加。随着电子技术的发展,对频率源的信号噪声要求越来越严格,因此低相位噪声在物理、天文、无线电通信、雷达、航空、航天以及精密计量、仪器仪表等各种领域里都受到重视。 1 相位噪声概述 相位噪声 ,就是指在系统内各种噪声作用下所表现的相位随机起伏,相位的随机 起伏起必然引起频率随机起伏,这种起伏速度较快,所以又称之为短期频率稳定度。 理想情况下,合成器的输出信号在频域中为根单一的谱线,而实际上任何信号的频谱都不可能绝对纯净,总会受到噪声的调制产生调制边带。由于相位噪声的存在,使波形发生畸变。在频域中其输出信号的谱线就不再是一条单根的谱线,而是以调制边带的形式连续地分布在载波的两边,在主谱两边出现了一些附加的频谱,从而导致频谱的扩展,相位噪声的边带是双边 的,是以0f 为中心对称的,但为了研究方便,一般只取一个边带。其定义为偏离载频1Hz 带宽内单边带相位噪声的功率与载频信号功率之比,它是偏离 载频的复氏频率m f 的函 数 ,记为 () m f ζ,单位为d B c / Hz ,即 ()010lg[/](1) m SSB f P P ζ= 式中SSB P 为偏离载频m f 处,1Hz 带宽内单边带噪声功率;0P 为载波信号功率。
同步方式对LTE网络性能影响探究
同步方式对LTE网络性能影响探究 中国电信天津分公司网络优化中心王健 二零一五年四月
目录 1时钟源同步方式 (3) 2LTE基站同步方式 (6) 3同步方式对LTE网络性能影响 (9) 4不同同步方案实测验证 (11) 5不同同步方案总结: (20)
1时钟源同步方式 LTE的时钟源同步方式有频率同步和相位同步两种方式,所谓频率同步,指的是时钟振动的次数进行同步,相位同步不仅包括振动的次数,还包括振动的振幅,是一种更精确的同步机制。TDD系统仅支持相位同步方式。TS36.401对于eNB同步有以下说明: eNB-synchronization: The eNB shall support a logical synchronization port for phase-, time- and/or frequency synchronisation. Logical synchronisation port for phase- and time-synchronisation shall provide 1) accuracy that allows to meet the eNB requirements on maximum relative phase difference for all eNBs in synchronised TDD-unicast area and FDD/TDD-multicast MBSFN synchronisation area; 2) continuous time without leap seconds traceable to common time reference for all eNBs in synchronised TDD-unicast area and FDD/TDD-multicast MBSFN synchronisation area; A logical synchronisation port for phase- and time-synchronisation may also be provided for all eNBs in FDD time domain inter-cell interference coordination synchronisation area Furthermore common SFN initialisation time shall be provided for all eNBs in synchronised TDD-unicast area and FDD/TDD-multicast MBSFN synchronisation
锁相环相位噪声与环路带宽的关系分析
锁相环相位噪声与环路带宽的关系分析 2009-09-09 15:13:17 作者:李仲秋曾全胜来源:现代电子技术 关键字:电荷泵锁相环相位噪声功率谱密度环路带宽 0 引言 电荷泵锁相环是闭环系统,系统各个部分都是一个噪声源,各部分噪声的大小不仅与电路本身有关,而且还与环路带宽等因素有关。因此,设计时必须分析其各频率范围内噪声源影响力的大小,权衡确定环路带宽与各噪声源的相互制约关系。以下利用锁相环的等效噪声模型,重点分析电荷泵锁相环系统的相位噪声特性,得出系统噪声特性的分布特点以及与环路带宽的关系。 1 电荷泵锁相环的基本原理 图1为电荷泵锁相环的示意图,主要由鉴相鉴频器(PFD)、电荷泵、滤波器、压控振荡器(VCO)、分频器等5部分组成,鉴相鉴频器主要用来检测输入信号x(t)与反馈信号xf(t)的频率、相位误差,并产生UP,DOWN信号控制电荷泵的开关。电荷泵由两个对称的电流源和开关组成。电荷泵的开关会对滤波器上的电容充放电,电流经过滤波器滤波后滤掉高频信号,在滤波器上产生能调整压控振荡器频率和相位的电压v(t)。当v(t)上的电压被调整为一个合适的电压值时,xi(t)的频率和相位与x(t)的一致,系统最终处于平衡状态,从而实现对输入信号的跟踪。
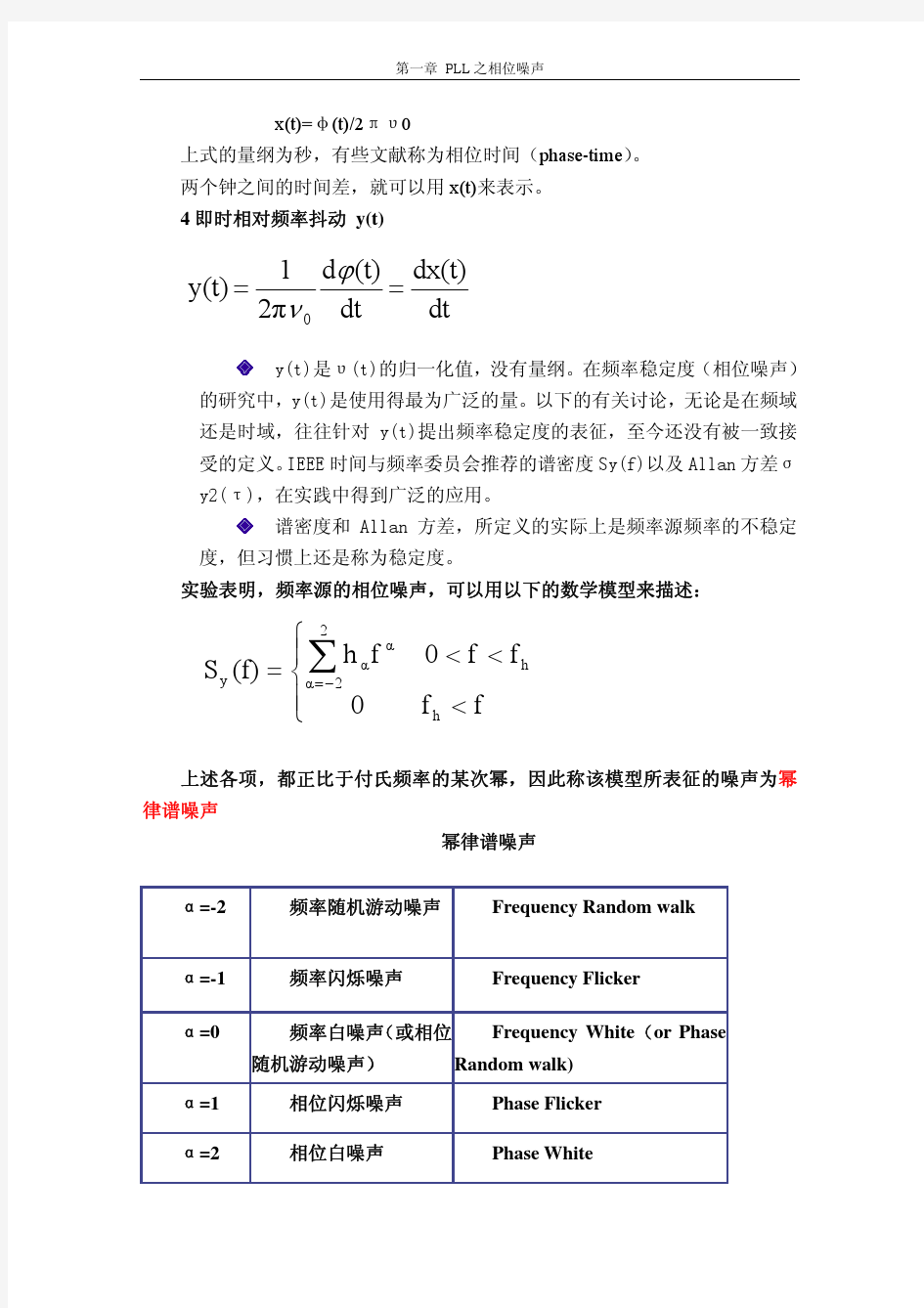
2 电荷泵锁相环的噪声模型与相位噪声特性分析 电荷泵锁相环的环路等效噪声模型可以用锁相环各子模块附加噪声源表示。图2给出了带有无源滤波器锁相环噪声源模的型。设fm为距离调制频率的偏移量,该图中主分频器、参考时钟分频器的均方噪声功率谱密度分别被表示为ψd(fm)和ψrcf(fm);鉴相鉴频器的相位噪声被表示为ψpd(fm);晶体振荡器的相位噪声被表示为ψx(fm);相位噪声源的单位是电荷泵的噪声被等价为电流源inp(fm)(单位: ); 滤波器的噪声被等价为电压源Vnf(fm)(单位: 的自由振荡噪声被表示为 环路输出信号的均方噪声功率谱密度被表示为它是闭环情况下所有噪声源影响的总和。输出相位噪声功率谱密度可以表示为: 式中:ψo lp2(fm)为具有低通传输函数的噪声源功率谱密度;ψohp2(fm)为具有高通传输函数的噪声源功率谱密度。 在图2所示的噪声源等效模型中,ψd(fm),ψref(fm),ψpd(fm),ψx(fm)和inp(fm)具有低通传输特性,其传输函数可以表示为: 式中:G(s)和H(s)分别为环路的开环增益函数和闭环增益函数。归一化的电荷泵相位噪声inp(fm)/Kpd和晶体振荡器噪声ψx(fm)/R对ψo lp(fm)的影响也可以用式(2)来表示。当用j2πfm代替s时,ψo2(fm)中具有低通传输函数噪声源功率谱密度的噪声分量ψo lp2 (fm)可以表示为:
教三阶魔方你从2分钟到20秒(1)
教三阶魔方你从2分钟到20秒(1)
7L内容:从30秒到25秒的教程(OLL全集,CROSS强化) 8L内容:从25秒到20秒以内的教程(慢拧与手速) 9L内容:后言 还有的是,5L~9L的内容,都需要回复才能查看,其一,我发现小站的人其实挺多,但是绝大部分都是游客,我希望来小站观光的游客能够注册帐号,这样有益于小站的发展,并且能够增加小站的人数,高手也会增加,当作做善事,其二就是这篇教材我下的功夫很多,希望各位把帖子能让跟多有需要的人看到,你回复一个顶起来后或许新手就看见了呢~ 另外说一下,你能到魔方小站的论坛来练习,都是渴望能够成为魔方高手的人。所以,一时的艰难不算什么,希望大家能够辛勤果敢,不怕困难地学习魔方,成为高手!但是假如你已经对魔方渐渐冷淡无趣,我相信你是无法进步的。所以,不怕万人阻挡,只怕自己投降!勤奋是高手的另一个名字! 还有,对教程不明白的,可以在本帖回复,对于其他魔方知识不明白的私信我,需要经常咨询或者要问的比较多的,可以加我QQ2609047698,下面进入内容,不懂可于本帖提问。
2L内容:从2分钟到1分钟的教程: 【前言】(可跳过) 三速无法达到1分钟的魔友,多半是练习不够,并且关乎到手法以及魔方的问题,其实进入1分钟相当简单,只要你肯下功夫学习,并且加上对魔方的热情,我相信每一位魔友都可以!这一步大概需要花掉半个月左右。 【关于练习】(必读) 学习了初级玩法后,必须要加强巩固初级玩法,不然初级玩法都没法掌握,就别说进一步学习新的了,必须要练习到一下几点:1.不用错公式2.不搞乱步骤3.能够独立还原。反正就是练习10遍,一遍都没有失误,发挥出正常水平就可以了,必须要保证这一点,这是很基础的。并且每天除了学习新的内容之外,还要天天都保证30次还原的练习量,有时间可以50次,甚至100次,反正就是尽可能多练习,这样进入1分是没问题的。 【关于手法】(必读) 手法,其实就是玩魔方的时候,你手指拧的方法。大家可以看到高手拧魔方,手都非常灵活,他们手速快是一方面的原因,其次就是手法问题。手法关系到你玩魔方的手速,所以新手练习手法是很有必要的。 大家可以看看FSC(就是手指快捷方法),你也可以直
PLL设计关键基础及基本参数确定方法
PLL设计关键基础因素 锁相环的瞬态特性通常是一个非线性过程,并且不能够简单的用式子来表示。但是当环路带宽不大于参考时钟频率的1/10时,离散模型可以用连续时间模型(s域)较好地近似。 PLL在锁定状态下的包括每一个模块的传递函数的线性模型,以下理论中所有的公式都是没有分频电路(N)的基础上进行的分析。 如下图所示, 这个模型是用来证明总的相位特性的传递函数。因此,PD可以表示成一个减法器。 假设LPF的电压传递函数为。PLL的开环传递函数为: 闭环传递函数为: 假设低通滤波器为一个最简单的一阶无源滤波器,如下图所示
那么LPF的电压传递函数为为 其中,带入LPF传递函数得 这是一个二阶系统,一个极点是vco提供的,另外一个极点是由LPF提供的。 为环路增益,单位为rad/s。 为了方便分析PLL的动态特性,将PLL闭环传输函数的分母化为二阶函数形式: 其中为衰减因子,为系统的自然振荡频率。 则公式最终化为: 其中
自然频率是低通滤波器的-3dB带宽和环路增益的几何平均值,从近似的角度来看,可以认为是环路的增益带宽积。 进行波特图分析时(开环分析闭环),开环传输函数的单位增益带宽为 相位裕度为: 在一个好的二阶系统中,通常大于0.5,最好使其等于0.707,这样有一个优化的频率响应。 PLL闭环传输函数化为二阶函数形式得:如果输入偏差相位变化慢,则输出相位偏差能够跟上其变化:如果输入相位偏差变化快,输出相位偏差变化会比输入小。 定义“输入/输出相位差传递函数(phase error transfer function)”为: 则 为了更好的分析信号的传输特性,我们假设输入的信号相位有一个阶跃,则最终系统稳定下来后,输出信号的相位变化为
通信原理_位同步
《通信原理》 §11.3 位同步 位同步是指在接收端的基带信号中提取码元定时的过程。位同步是正确取样判决的基础,只有数字通信才需要,所提取的位同步信息 是频率等于码速率的定时脉冲,相位则根据判决时信号波形决定,可能在码元中间,也可能在码元终止时刻或其他时刻。实现方法也有插入导频法(外同步)和直接法(自同步)。 一、插入导频法在基带信号频谱的零点处插入所需的位定时导频 信号。其中,图(a)为常见 的双极性不归零基带信号的功率谱,插入导频的位置是1/T;图(b)表示经某种相关变换的基带信号,其谱的第一个零点为1/2T,插入导频应在1/2T处。 图11-14 插入导频法频谱图 在接收端,对图11-14(a)的情况,经中心频率为1/T 的窄带滤波器,就可从解调后的基带信号中提取出位同步所需的信号;对图11-14(b)的情况, 窄带滤波器的中心频率应为1/2T,所提取的导频需经倍频后,才得所需的位同步脉冲。 图11-15 画出了插入位定时导频的系统框图,它对应于图11-14(b)所示谱的情况。发端插入的导频为1/2T,接收端在解调后设置了1/2T窄带滤波器,其作用是取出位定时导频。移相、倒相和相加电路是为了从信号中消去插入导频,
使进入取样判决器的基带信号没有插入导频。这样做是为了避免插入导频对取样 判决的影响。 (a)发送端 (b)接收端 图 11-15 插入位定时导频系统框图 此外,由于窄带滤 波器取出的导频为 1/2T ,图中微分全波整流起到了倍频的 作用,产生与码元速率相同的位定时信号 1/T 。图中两个移相器都是用来消除窄 带滤波器等引起的相移。 另一种导频插入的方法是包络调制法。这种方法是用位同步信号的某种波形对 移相键控或移频键控这样的恒包络数字已调信号进行附加的幅度调制,使其包络 随着位同步信号波形变化;在接收端只要进行包络检波,就可以形成位同步信号。 设移相键控的表达式为 (11.3-1) 利用含有位同步信号的某种波形对 s 1 (t ) 进行幅度调制,若这种波形为升余弦 波形,则其表示式为 (11.3-2) 式中的 ∧ = 2π / T ,T 为码元宽度。幅度调制后的信号为 (11.3-3) 接收端对 s 2 (t ) s 1 (t ) = cos[ωc t + ?(t )]
锁相环中的相位噪声研究
The Research of Noise in The PLL LU Shiqiang , YANG Guoyu ( School of the Microwave engineering ,UESTC ChengDu 610054 China ) Absract This articles introducs the basic concepts and the phase noise in phase-locked loops (PLLs). It focus on a detailed examination of two critical specifications associated with PLLs : phase noise and reference spurs. What causes them and how can they be minimized? Also it inculdes an example . Key words :PLL ; Phase Noise ; Oscillator 1 . The Basic Theory of the PLL A phase-locked loop is a feedback system combining a voltage controlled oscillator and a phase comparator so connected that the oscillator maintains a constant phase angle relative to a reference signal. Phase-locked loops can be used, for example, to generate stable output frequency signals from a fixed low-frequency signal . The phase locked loop can be analyzed in general as a negative feedback system with a forward gain term and a feedback term. .A simple block diagram of a voltage-based negative-feedback system is shown in Figure 1. Figure 1. Standard negative-feedback control system model In a phase-locked loop, the error signal from the phase comparator is proportional to the relative phase of the input and feedback signals. The average output of the phase detector will be constant when the input and feedback signals are the same frequency. The usual equations for a negative-feedback system apply. Forward Gain = G(s), [s = jw = j2pif] Loop Gain = G(s) H(s) Closed Loop Gain = G(s)/[1+G(s)H(s)] Because of the integration in the loop, at low frequencies the steady state gain, G(s) is very high and VO/VI, Closed-Loop Gain =1/ H and Fo=NF REF. . The components of a PLL that contribute to the loop gain include : 1. The phase detector (PD) and charge pump (CP). 2. The loop filter, with a transfer function of Z(s) 3. The voltage-controlled oscillator (VCO), with a sensitivity of KV /s 4. The feedback divider, 1/N
超顺手的公式之pll
M2 U M’U2 M U M2 M2 U’ M’U2 M U’ M2 巧计方法:遇到三棱换,不管三七二十一先M2,做M2的同时观察魔方左右两面,即可观察出是顺时针还是逆时针的三棱换。如果是顺时针,接下来就逆时针转U,反之,则顺时针转U。紧接着不管三七二十一M’U2 然后和之前一样,顺时针三棱换就转逆时针的U 逆时针三棱换就转顺的U,M2收尾。 PLL03,04 M2 U M2 U2 M2 U M2 M2 U M2 U’(M’E2)2注:E2指的是上层与下层的夹层旋转180° M2 U’ M2 U (M’E2)2方向不同U与U’互换 PLL05,06 05.(R U R' F') ( r U R' U') (r' F R2 U' R') 06. (R U)( R'2 F')(r U R U')(r' F R U' R') 是倒过来做的一样顺
07.x'(RU'R'D)(RUR'D')(RUR'D)(RU'R'D') (R2 UR'd') (R U R' U' R U R' U')( R U R' F U' F2) 08.(R U R' U')(R' F)(R2 U' R' U') (R U R' F') PLL09,10,11 09.(R'U'F')(RU R' U')(R' F)(R2 U' R' U' )(R U R' UR) 10.(R'UR'U)d(R'F'R2U')(R'UR'F)(RF) 11.F(R U'R' U')(R U R' F')(R U R' U') (R' F R F') Pll12,13 12.(R’U2)(RUR’)z(R2UR’DRU’) 13.(R U R'F')(R U R'U')(R'F R2 U'R'U') PLL14,15 14.(R' U2)(R U'U')(R' F)(R U R' U') (R'F')(R2 U')
现代通信网中的同步技术
现代通信网中的同步技术 同步是指信号之间在频率或相位上保持某种严格的特定关系,也就是它们相对应的有效瞬间以同一个平均速率出现。 在模拟通信网中,载波传输系统两端机间的载波频率需要同步,即收发终端机的载波频率应该相等或基本相等,并保持稳定,以保证接收端正确的复原信号。 数字通信的特点是将时间上连续的信号通过抽样、量化及编码变成时间上离散的信号,再将各路信号的传送时间安排在不同时间间隙内。为了分清首尾和划分段落,还要在规定数目的时隙间加入识别码组,即帧同步码,形成按一定时间规律排列的比特流,如PCM信息码。在通信网内PCM信息码的生成、复用、传送、交换及译码等处理过程中,各有关设备都需要相同速率的时标(Time Scale)去识别和处理信号,如果时标不能对准信号的最佳判决瞬间,则有可能出现误码,也就是数字设备要协调,且准确无误地运行就需要各时标具有相同的速率,即时钟同步。此外数字网的同步还包括帧同步。这是因为在数字通信中,对比特流的处理是以帧来划分段落的,在实现多路时分复用或进入数字交换机进行时隙交换时,都需要经过帧调整器,使比特流的帧达到同步,也就是帧同步。 数字网中的同步技术有以下几种: (1) 接收同步:在点与点之间进行数字传输时,收端为了正确地再生所传递的信号,必须产生一个时间上与发端信号同步的、位于最佳取样判决位置的脉冲序列。因此,必须从接收信码中提取时钟信息,使其与接收信码在相位上同步。这种为了满足点对点通信的需要所提出的相位同步要求广泛用于数字传输之中。 (2) 复用同步:在数字信道上,为了提高信道利用率,通常采用时分多路复用的方式,将多个支路数字信号合路后在群路上传输,这称为数字复用。进行合路的这些支路信号,来自不同的地点,可能具有不同的相位,通常还可能具有不同的速率。为了使这些支路信号在群路信道上正确地进行合路,要求它们在群路信道上能同步运行。这种复用同步是线路上传输所必需的。 复用包括同步复用、准同步复用和非同步复用三种技术。同步复用将各支路信息依次插入群路时隙中,实现简单,传输效率高,已广泛应用于数字话路复用设备和SDH设备中。准同步复用采用码速调整技术,首先将支路速率进行调整。因此能将在一定频率容差范围内的各个支路信号复用成一个高速数字流,而不再像同步复用那样要求各支路信号之间的频率和相位严格同步,传输效率也较高,广泛应用于PDH数字群复用中。非同步复用采用多个二进制数码传送一个二进制数字信息的方法(如高速取样法、跳变沿编码法等),因此各复用支路信号之间的频率和相位都不必同步。但信道的传输效率较低,一般只用在低速数据信号复用中。 (3) 交换同步:在一个由模拟传输和数字交换构成的混合网中,网内不存在交换同步问题。只有在数字传输和数字交换构成的综合数字网内,为了使到达网内各交换节点的全部数字流都能实现有效的交换,必须使到达交换节点的所有数字流的帧定位信号同步,这种数字交换中需要的同步称为交换同步。由于交换同步涉及到网中到达各交换节点的全部数字流,因此又称为网同步。本书重点讨论的就是网同步的基本概念及网同步技术。 不同的同步技术对节点时钟的控制将采用不同的方法。 (1) 单向控制:对同步的控制仅在传输链路的一个方向上进行,或者说仅对链路的一侧有效。强制同步都是单向控制的。主从同步是网中指定一个主时钟节点,所有其他从时钟节点都受主时钟节点的控制;时间基准分配是从节点都接受时间基准的同步控制;外部基准是利用通信网外的基准时钟来控制网中所有的节点。 (2) 双向控制:网同步的控制在传输链路的两个方向上都使用,也就是链路两侧都
锁相环常见问题解答要点
ADI官网下载了个资料,对于PLL学习和设计来说都非常实用的好资料,转发过来,希望对大家有帮助(原文链接 https://www.360docs.net/doc/fd15075877.html,/zh/content/cast_faq_PLL/fca.html#faq_pll_01) ?参考晶振有哪些要求?我该如何选择参考源? ?请详细解释一下控制时序,电平及要求? ?控制多片PLL芯片时,串行控制线是否可以复用? ?请简要介绍一下环路滤波器参数的设置? ?环路滤波器采用有源滤波器还是无源滤波器? ?PLL对于VCO有什么要求?以及如何设计VCO输出功率分配器? ?如何设置电荷泵的极性? ?锁定指示电路如何设计? ?PLL对射频输入信号有什么要求? ?PLL芯片对电源的要求有哪些? ?内部集成了VCO的ADF4360-x,其VCO中心频率如何设定? ?锁相环输出的谐波? ?锁相环系统的相位噪声来源有哪些?减小相位噪声的措施有哪些? ?为何我测出的相位噪声性能低于ADISimPLL仿真预期值? ?锁相环锁定时间取决于哪些因素?如何加速锁定? ?为何我的锁相环在做高低温试验的时候,出现频率失锁? ?非跳频(单频)应用中,最高的鉴相频率有什么限制? ?频繁地开关锁相环芯片的电源会对锁相环有何影响? ?您能控制PLL芯片了么?,R分频和N分频配置好了么?
?您的晶振输出功率有多大?VCO的输出功率有多大? ?您的PFD鉴相极性是正还是负? ?您的VCO输出频率是在哪一点?最低频率?最高频率?还是中间的某一点?VCO 的控制电压有多大? ?您的PLL环路带宽和相位裕度有多大? ?评价PLL频率合成器噪声性能的依据是什么? ?小数分频的锁相环杂散的分布规律是什么? ?到底用小数分频好还是整数分频好? ?ADI提供的锁相环仿真工具ADISimPLL支持哪些芯片,有什么优点? ?分频–获得高精度时钟参考源? ?PLL,VCO闭环调制,短程无线发射芯片? ?PLL,VCO开环调制? ?时钟净化----时钟抖动(jitter)更小? ?时钟恢复(Clock Recovery)? 问题:参考晶振有哪些要求?我该如何选择参考源? 答案:波形:可以使正弦波,也可以为方波。 功率:满足参考输入灵敏度的要求。
三阶魔方单手PLL公式
说明:无法理解符号意思的或看不懂图案的请自觉学习初级玩法。 z U’ R U’ R’ U’ R’ U’ R U R U2 R U’ R U R U R U’ R’ U’ R2 z U z’ R U2 R’ z U’ z’ x’ u’ U’ R2 U z’ R U R’ U’ R U’ R U R U’ R’ U R U R2 U’ R’ x’ R U’ R D2 R’ U R D2 z’ U2 x’ R2 D2 R’ U’ R D2 R’ U R’ x’ R U’ R’ D R U R’ D’ R U R’ D R U’ R’ D’ R2 U’ R2 U’ R2 U y’ R U R’ B2 RU’ R’
R U R’ U’ R’ F R2 U’ R’ U’ R U R’ F’ R’ U R’ U’ y R’ F’ R2 U’ R’ U R’ F R F R’ U2 R’ U’ y R’ F’ R2 U’ R’ U R’ F R U’ F R U2 R’ U’ R U2 L’ U R’ U’ L z U’ R D’ R2 U R’ U’ R2 U D R’ U2 R U2 R’ F R U R’ U’ R’ x U’ R2 R U2 R’ U2 R x’ U’ R’ x U’ R U x’ R U R2 R2 u’ R U’ R U R’ D y R2 y R U’ R’
R U R’ y’ R2 u’ R U’ R’ U R’ D y R2 R’ U’ R y R2 z’ R x’ U’ z U R U’ R u’ R2 R2 z’ R x’ U’ z U R’ U’ R u’ R2 yz U’ R U z U z’ U’ R U2 z U’ R U z’ R’ U’ R U2 z U’ R D’ z U’ R z’ R’ U2 z U R’ U’ z’ R U R’ U2 L U’ R z U’ R D R’ U R U’ R z’ R’ U’ L U2 R U2 R’ R2 U’ R’ U R U’ x’ U’ z’ U’ R U’ R’ U’ z U R U’ R’ U R U’ R2 zx U’ R’ U R y’ R U R’ U’ R2
相位噪声基础及测试原理和方法
相位噪声基础及测试原理和方法 相位噪声指标对于当前的射频微波系统、移动通信系统、雷达系统等电子系统影响非常明显,将直接影响系统指标的优劣。该项指标对于系统的研发、设计均具有指导意义。相位噪声指标的测试手段很多,如何能够精准的测量该指标是射频微波领域的一项重要任务。随着当前接收机相位噪声指标越来越高,相应的测试技术和测试手段也有了很大的进步。同时,与相位噪声测试相关的其他测试需求也越来越多,如何准确的进行这些指标的测试也愈发重要。 1、引言 随着电子技术的发展,器件的噪声系数越来越低,放大器的动态范围也越来越大,增益也大有提高,使得电路系统的灵敏度和选择性以及线性度等主要技术指标都得到较好的解决。同时,随着技术的不断提高,对电路系统又提出了更高的要求,这就要求电路系统必须具有较低的相位噪声,在现代技术中,相位噪声已成为限制电路系统的主要因素。低相位噪声对于提高电路系统性能起到重要作用。 相位噪声好坏对通讯系统有很大影响,尤其现代通讯系统中状态很多,频道又很密集,并且不断的变换,所以对相位噪声的要求也愈来愈高。如果本振信号的相位噪声较差,会增加通信中的误码率,影响载频跟踪精度。相位噪声不好,不仅增加误码率、影响载频跟踪精度,还影响通信接收机信道内、外性能测量,相位噪声对邻近频道选择性有影响。如果要求接收机选择性越高,则相位噪声就必须更好,要求接收机灵敏度越高,相位噪声也必须更好。 总之,对于现代通信的各种接收机,相位噪声指标尤为重要,对于该指标的精准测试要求也越来越高,相应的技术手段要求也越来越高。 2、相位噪声基础 2.1、什么是相位噪声 相位噪声是振荡器在短时间内频率稳定度的度量参数。它来源于振荡器输出信号由噪声引起的相位、频率的变化。频率稳定度分为两个方面:长期稳定度和短期稳定度,其中,短期稳定度在时域内用艾伦方差来表示,在频域内用相位噪声来表示。 2.2、相位噪声的定义
高阶魔方PLL公式大全
高阶魔方PLL公式大全 高阶魔方相对于三阶魔方来说具有其自身的特殊性,在高阶降阶以后我们可以把它看成是一个畸形的三阶魔方。其特点是中心块放大,棱块横向变长,角块相对来说就显得小的可怜了。阶数越高,这种畸形的程度就越明显。在速拧中,部分普通的PLL公式注定不适用于这种形态的“三阶魔方”。因此,在下收集了一些高阶适用的PLL 公式,以供高阶玩家们交流学习。如果大家有什么更好的公式,请贡献出来,一起分享,一起提高。在下万分感激! ——常州.中岛丸PS:公式中红字标注的就是高阶PLL PLL01 RU'R(URUR)U'R'U'R2 PLL02 R2’ U (R U R’ U’)R’ U’ R’ U R’ PLL03 R2 U2 R U2 R2 U2 R2 U2 R U2 R2 PLL04
(R U R B')(R' B U' R')( f R U R' U' f') PLL05 (I U' R)D2 (R' U R)D2 R2 PLL06 x' R2 D2 (R' U' R)D2 R' U R' PLL07 (R2 U R` U`) y (RUR`U`)2 R U R` F U` F2 PLL08 (R U R' U')R' F R2 U' R' U' R U R' F' PLL09 (R` U` F`) (R U R` U`) (R` F R2) U` R` U` R U R` U R PLL10
(R` U R`U`) y (R` F` R2 U`) R` U R` F R F PLL11 F(R U' R' U')R U R' F' (R U R' U') R' F R F' PLL12 x U2(r` U` r)U2 (l` U R` U` R2) PLL13 (R U R’ F’) (R U R’ U’) R’ F R2 U’ R’ U’ PLL14 (R' U2 R U2’) R' F (R U R' U') R' F' R2 U' PLL15 (R U2' R' U2) R B' (R' U' R U) R B R’2 U PLL16
自由空间时间频率同步
自由空间时间频率同步 在当今时间频率体系中,时间频率同步,尤其是自由空间时间频率同步发挥着不可替代的作用。本论文针对卫星导航定位与授时、射电天文学等领域的需求,开展了基于相位补偿的微波和光载射频两种自由空间时间频率同步方法的研究。 该研究主要包括以下几个方面:1.基于相位补偿的自由空间微波频率同步。这一工作在距离为108 m的大气中实验演示了L波段频率信号的高稳定度传输。 通过探测与补偿传输路径中的相位噪声和一系列频率变换,两条传输链路同时将相位锁定于同一频率参考源的不同频率信号由发射端发出,在接收端分别复现了参考频率,测得两复现的频率信号间的相对稳定度——即采用相位补偿方法的自由空间频率传输稳定度优于3×10-13/s、4×10-17/d。此方案可以将目前各种商用原子钟,如铯束钟、主动型氢原子钟等的频率信号传输至客户端并保持其频率稳定度,在异地原子钟的高精度频率比对、北斗卫星导航系统、射电天文学和海陆空天立体时间频率网络建设中有广阔的应用前景。 2.基于相位补偿的星地微波频率同步链路可行性论证。为了预估主动相位补偿的微波频率传输方案在星地链路等远距离传输中的稳定度,将实验设备集成为可搬运系统,并在中国计量院昌平基地进行了从10 m到640 m不同传输距离上的测试。 在气流相对平稳的夜间,测量了系统短期传输稳定度,并参照大气湍流标度律构建了传输稳定度与积分时间和传输距离的二元回归模型。回归分析的结果表明,若将这一模型外推到星地链路,传输稳定度有望达到1×10-12/s、6× 10-16/d,这一指标较卫星双向时间频率比对法和基于GPS的时间频率传输方法有一到两个数量级的提升。
锁相环输出信号相位噪声噪声及杂散特性分析应用实践
锁相环输出信号相位噪声噪声及杂散特性分析应用实践 【摘要】本文详细地介绍了锁相环的鉴频鉴相器、分频器和输入参考信号的相位噪声对锁相环合成输出信号的近端相位噪声的具体贡献值。并以CDMA 1X基站系统中800MHz的FS 单板的锁相环输出信号相位噪声指标进行理论计算。为广大锁相环设计者提供理论计算方法的参考和实践设计的参考依据。 【关键词】锁相环设计,相位噪声 一、术语和缩略语 表格 1 术语和缩略语 二、问题的提出 锁相环工作原理图,由三部分组成:鉴相器(PFD)、环路滤波器(LPF)和压控晶体振荡器(VCXO),如图0-1所示。 图0-1锁相环原理框图 锁相环输出信号指标主要有相位噪声、谐波抑制、杂散、输出功率、跳频时间。在本文中以CDMA1X基站系统中800MHz的FS单板应用为背景,在CDMA基站中不需要跳频,所以调频时间基本不做要求。输出功率比较好控制,只要调整衰减网络就能保证。锁相环输出信号的相位噪声、谐波抑制和杂散成为影响系统指标的主要因素,成为锁相环技术的关键指标项。在锁相环设计中,相位噪声和杂散成为系统设计主要难点。 三、解决思路 相位噪声分析 相位噪声主要由VCO、鉴频鉴相器、分频器和输入参考信号的相位噪声这四部分引入。环路滤波器对于由鉴频鉴相器、分频器和输入参考信号的相位噪声这三部分引入的相位噪声
具有低通特性,对于VCO产生的相位噪声具有高通特性。一般来说环路带宽内的相位噪声主要决定于由鉴频鉴相器、分频器和输入参考信号,环路带宽以外的相位噪声主要决定于VCO,在环路带宽周围,这四部分的噪声影响相当。所以为了尽量降低输出信号的相位噪声环路滤波器的环路带宽的最佳点是由鉴频鉴相器、分频器和输入参考信号的相位噪声这三部分引入的相位噪声总和与VCO引入的相位噪声相同时的频率。在实际运用中还礼滤波器的设计是非常重要的。对于远端相位噪声如100KHz和1MHz处的一般远远高于环路带宽,其相位噪声主要决定于VCO,要保证其指标主要是选择良好的VCO。而近端相位噪声如100Hz主要由鉴频鉴相器、分频器和输入参考信号的相位噪声决定,但如果还礼带宽取得很小的话如200Hz则VCO的影响也将非常之大。而如果环路带宽远远大于1KHz如为6KHz 以上时1KHz处的相位噪声也将主要由鉴频鉴相器、分频器和输入参考信号的相位噪声决定。下面就分别分析这三部分相位噪声。 由鉴相器引入的相位噪声 由于鉴相器引入的相位噪声为: PD Phase Noise = ( 1 Hz Normalized Phase Noise Floor from Table ) + 10log( Comparison Frequency ) + 20log( N ) 现在FS板的中频环路采用的PLL芯片为NS的LMX2306,其相位噪声基底为-210dBc/Hz。 在CDMA 1X 基站系统800MHz的FS单板中采用的鉴相频率为30KHz,两个中频分别为69.99MHz和114.99MHz,由鉴相器产生的相位噪声为: 69.99MHz: PD Phase Noise= -210+10log(30000)+20log(69990000/30000)= -97.9dBc/Hz 114.99MHz: PD Phase Noise= -210+10log(30000)+20log(114990000/30000)=-93.5dBc/Hz 射频本振范围为754~779MHz。步进为30KHz,鉴相频率为240KHz。对于779MHz 的本振由鉴相器引入的相位噪声为: PD Phase Noise= -210+10log(240000)+20log(779000000/240000)=-85.9dBc/Hz 由分频器引入的相位噪声 由分频器引入的相位噪声的计算公式入下: DIV Phase Noise = (Device Phase Noise Floor )+ 20log( N ) PLL芯片中分频器的相位噪声在器件手册中并没有给出。一般高频分频器的相位噪声基底约为-165dBc/Hz左右。因此就假设分频器的相位噪声基底为-165dBc/Hz,于是得到分频器引起的相位噪声如下: 69.99MHz的中频频率为: DIV Phase Noise= -165+20log(69990000/30000)= -97.6dBc/Hz 114.99MHz的中频频率为: DIV Phase Noise= -165+20log(114990000/30000)= -93.3dBc/Hz 779MHz的射频频率为: DIV Phase Noise= -165+20log(779000000/240000)= -94.7dBc/Hz 由参考信号引入的相位噪声 参考信号引起的相位噪声的计算公式如下 REF Phase Noise = (REF’S Phase Noise )-20log(R)+ 20log( N ) 系统的参考信号都是由GPSTM模块提供的,GPSTM输出的参考信号的相位噪声为-130dBc/Hz@100Hz和-145dBc/Hz@1KHz。最后参考信号通过FDM板到FS板,FDM板输
三阶魔方高级复原教程-CFOP
CFOP 三阶魔方还原公式 CROSS(底层十字) F2L(前两层) OLL(上层翻色) PLL(上层复原) 三阶魔方高级玩法教程----Cross公式 Cross:底棱归位,又称之谓底层架十字,意思是底部十字还原。本教程依然推荐使用白色面做底面。 cross这一步虽然是CFOP快速法的第一步,由于魔方的变化数太多,故这一步的情况也相应非常多,所以在讲解这一步的时候,我们重点是讲一些简单的技巧帮助大家开阔思维,帮助大家大家思考、判断能力,真正的学习是需要自己多动手、动脑,多加练习,多加总结,才能终有所成就的。理论上,任何一种case,都是可以在8步之内完成的,我们在练习的过程,也尽量要求8步内完成,8步内完成,相信很容易就能做到。要做到快速完成Cross,步骤尽量少还远远不够,我们还需要结合我们习惯用的手法来完成,只有做到步骤尽量少,配合手法很顺手,这样才能在最短时间内完成。下面给出一些高手练习的参考经验: 随意打乱魔方,不限定观察时间,观察并写出如何在8步内完成的公式,并验证完成,练习一段时间,满意后,开始练习,限定在15秒内,观察并写出如何在8步内完成的公式,并验证完成;练习满意后,同样限定在15秒内,快速观察并迅速记忆牢固如何在8步内完成,15秒后凭记忆快速完成复原;上阶段练习满意后,进入另一个高要求阶段训练,用标准打乱公式打乱魔方,不仅在15秒,快速观察并迅速记忆牢固如何在8步内完成,同时快速拿起魔方,眼睛不看底层的四个白色棱块,双手快速完成,眼睛快速寻找第一组的f2l。做到最后高要求阶段有相当的难度,需要循序渐进的练习,不可急于求成。正所谓水到渠成,瓜熟蒂落,功到自然成。
一分钟搞明白同步调制与异步调制
一分钟搞明白同步调制与异步调制 SPWM逆变器的性能与两个重要参数有关,它们是调制比M和载频比(载波比)N。 其定义分别为 (1-1) (1-2) 上面两式中 Urm、fr(Wr、Tr) - 调制信号Ur的幅值、频率(角频率、周期) Utm、ft(Wt、Tt)- 载波信号Ut的幅值、频率(角频率、周期) 在SPWM调制中,Utm值常保持不变,M值的改变由Urm的改变来实现。在整个调速 过程中,可以从载频比N的变化与否,将调制分为同步调制与异步调制两种。 1.同步调制 在同步调制方式中,N为常数,变频时三角载波的频率与正弦调制的频率同步改变,因 而输出电压半波内的矩形脉冲数是固定不变的。 如果设置N为3的倍数,则同步调制能保证输出波形的正、负半波始终保持对称,并能严格保证三相输出波形间保持相差120°的对称关系,输出谐波较低。 但是,当变频器输出频率较低时,相邻两脉冲间的间距增大,谐波会显著增加,使负载电 机产生较大的脉动转矩和较强的噪声。这是同步调制的最主要缺点。 2.异步调制 为了解决上述同步调制的缺点,可以采用异步调制方式。 即在异步调制方式中,在改变调制波频率fr时保持三角载波频率ft不变,提高了低频时的载频比,输出电压半波内的矩形脉冲数可随输出频率的降低而增加,相应地可减小负载 电机的转矩脉动与噪声,改善系统的低频工作性能。 有一利必有一弊,异步调制方式在改善低频工作性能的同时,又失去了同步调制的优势。随着输出频率的变化,当载频比N连续变化时,不可能总是3的倍数,这样就使输出电压 波形及其相位都发生变化,难以保持三相输出的对称性,因而引起电机工作不平稳。
3.分段同步调制 为了扬长避短,可将同步调制和异步调制结合起来,成为分段同步调制方式。分段同步调制就是把整个变频范围划分成若干频段,在每个频段内都维持恒定的载频比N。而对不同的频段取不同的N值,频率低时,N值取大些,一般大致按等比级数安排,当然也最好能确保N值是三的整数倍。 下表给出了一个实际系统的频段和载频比分配,以资参考。 表1-1 分段同步调制的频段和载波比 分段同步调制关键不足在于:在N值切换时可能出现电压突变乃至振荡。 为了回避短处,要注意两个问题:一是确保N值切换不出现电压突变;二是应在临界点处设置一个回差,以避免不同N值之间频繁切换,出现振荡。 4.其它说明 实际上,在大多数高性能调速应用场景下,都是采用多种调制相结合的方式,发挥各种调制方式优点的同时,规避其缺点,尽最大可能提升产品调速性能。