SGJ-T 型轨检小车使用说明书

现场水平零点标定
第一步:启动软件,选择【在线测量】菜单下的【标定】子菜单,打开标定对话框。
第二步:标定水平。
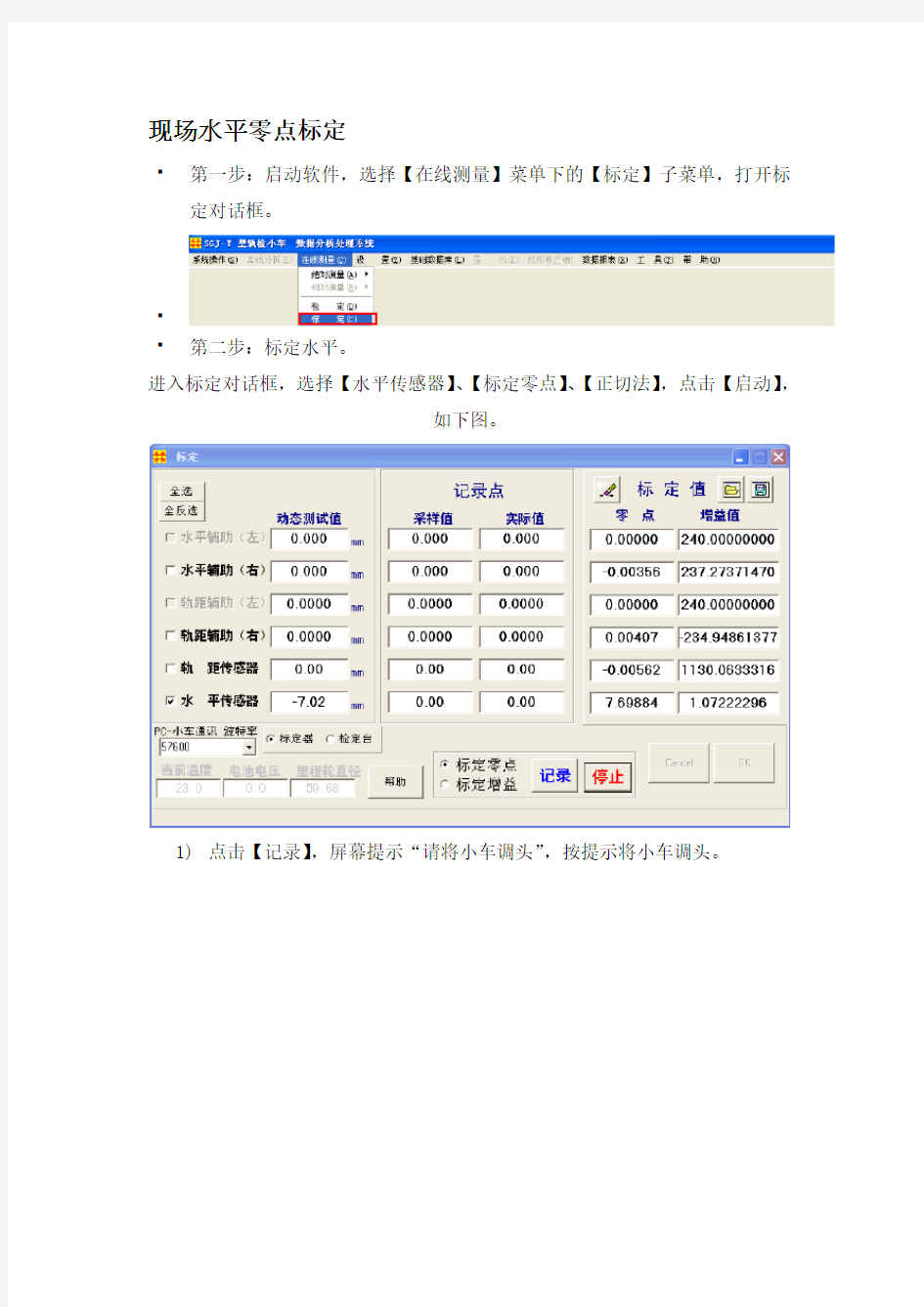
进入标定对话框,选择【水平传感器】、【标定零点】、【正切法】,点击【启动】,
如下图。
1)点击【记录】,屏幕提示“请将小车调头”,按提示将小车调头。
2)小车放置平稳后,点击【再记录】
3)小车放置平稳后,点击【停止】
现场轨距零点标定
注明:要借用标准合格的轨距迟才能完成
1.1 系统参数设置
在进入定点测量前,需要检查系统的相关参数设置,如果系统参数设置不正确,会直接影响最终的测量结果,及操作的顺畅。
单击【设置】→【绝对测量系统设置】→【系统参数设置】,进行绝对测量参数的设置。
系统参数设置
1、设站类型:选择是全站仪独立完成设站还是全站仪在小车控制下完成设站;
2、设站加密基桩数:选择设站所且的CP3基桩点的个数;
3、全站仪类型选择:对系统中所采用的全站仪的品牌进行设置;
4、棱镜高:对小车棱镜高的设置,建议不要更改,以设备出厂文件为准;
5、棱镜与右轨作用力偏差:此参数影响轨道方向(横向偏差)的测量,当方向
的调头差较大时,以‘横向校正’功能对此参数进行校正;
6、棱镜中心偏差:此参数为补偿棱镜光学中心偏差,提高轨道方向的测量精
度。建议不要更改系统所配置好的棱镜和此参数,否则及时与厂家联系;
7、【默认值】按钮,用默认值作为各参数设置值;
8、点击【0K】按钮完成测量设置。
1.2 系统操作
系统操作主要用于完成软件系统的文件打开、文件关闭、操作员权限管理及软件系统的退出关闭。
核对密码前
核对密码后
【核对密码】该功能是用于用户权限的管理,在RailCheck XP中用户权限被分为两种,一种是管理员权限,一种是操作员权限。点击后将弹出对话框要求输入相应密码,软件初始时已经设置了密码,初始密码设为88888888。密码的修改参考下面【修改密码】中的描述。
【修改密码】该功能是用于修改用户设置的密码。当需要修改密码时请点击此功能,进入权限管理对话框,在其中修改相应的密码。
1.3 在线测量
在线测量功能根据软件与设备的注册情况不同可以完成轨道三维定位测量(绝对测量),同时在线测量可以完成整个系统的检定与标定功能。
这里以注册为SGJ-T型为例进行在线测量功能的说明。此时在线测量能够完
成全站仪的设站功能,定点测量的数据采集功能,数据采集系统的检定功能,数据采集系统的标定功能。
(注意)测量仪工作在定点测量模式下,需要连接全站仪,及全站仪端的无线通讯模块,请测量前确认是否已连接上述两设备,否则系统将无法正常工作。
主界面下定点测量菜单
定点测量模块中常规功能的使用
1.定点测量模块打开
如上图所示,启动SGJ-RailCheck系统测量软,在【在线测量】菜单下【绝对测量】子菜单,点击【定点测量】,进入定点测量界面。
2.进入定点测量模块前的工作
进入定点测量对话框之前,软件询问是否设置了全站仪的温度和气压,并要求记录于软件中。点击‘是’,直接进入定点测量‘启动’状态;点击‘否’,进入温度和气压记录界面。
温度、气压的设置和记录
3.定点测量模块的各功能区说明及模块的启动
打开定点测量界面,各功能区如下图所示,主要包括菜单区、数据显示与操作区、全站仪状态区、轨道状态区、操作控制区、状态显示区。
点击【启动】,软件首先打开上位机的通讯串口,同时自动锁定全站仪位置并询问全站仪状态,如‘棱镜自动识别’是否打开,全站仪是否‘照准’或‘跟踪’小车棱镜。其状态于界面左上角区域显示。
定点测量界面
4. 全站仪控制
单击菜单[全站仪控制]或快捷键‘Alt+P ’,打开全站仪控制小窗口,通过其窗口上按钮可实现全站仪打开ATR 棱镜识别、小车棱镜照准、小车棱镜跟踪、全站仪换盘、测量模式转换;如图所示,其中各按钮功能在状态栏‘动态提示’
中有说明。
Leica 全站仪控制
5.数据库选择
单击菜单[数据库] 或快捷键‘Alt+D’,选择测用于存放测量数据的数据库,共八个数据库可选。
6.设置
单击菜单[设置]或快捷键‘Alt+ S’,可设置定点测量‘重叠段测量’、‘横向校正’、‘存储提示’、‘平顺性显示’、‘自定义点号’、‘附加信息显示’、‘绘图起点’、‘多次测量’、‘重叠段标志’等功能项。
7.测量
将小车停稳,点击右侧‘测量’按钮,开始测量。线路中线坐标于‘坐标显示’区显示,轨道状态于‘施工指示’区显示;如果在‘竣工测量模式下’,数据可自动保存测量数据库。
8.数据保存
测量数据稳定后,点击右侧‘保存数据’(施工模式下)按钮,将测量数据保存于测量数据库(选中的数据库)中。
9.帮助
点击‘帮助’菜单,打开定点测量帮助界面,其中有定点测量数据定义,状态栏提示说明。
定点测量帮助
定点测量模块中特殊功能的使用
重叠段测量
功能说明:重叠段是为要消除由于CP3网精度下降或全站仪设站误差引起的‘测量数据不平顺’。
功能进入:点击菜单[设置]->[重叠段]
重叠段测量参数设置
参数设置:选中重叠段测量复选框后,系统提示输入一些用于重叠段测量的参数。
1、误差分配方式:前分、中分和后分
中分将测量误差平均分配到测量重叠段两侧。
前分将测量误差分配到前面已经测量的区段。
后分将测量误差分配到后面还未测量的区段。
2、重叠测量点数:用来设置需要重叠测量的点数。
3、误差修正顺率:用来设置在每米最需修正的误差大小,单位:mm/m 重叠点测量:将小车推到需要重叠测量的点,开始测量,数据稳定后保存数据,同时需重叠的点数减少一个,剩余点数显示于‘重叠点数’
编辑框;如果某个点要重测,只要改变点号后重新测量即可。
测量完毕,系统会自动提示:
重叠点测量完毕提示
误差修正:重叠点测量完毕后开始误差修正,对需要测量的点依次进行测量即可,误差按设置的顺率进行修正,修正完毕,系统会自动
提示。
重叠段误差修正完毕提示
横向校正
功能说明:横向校正是为了保证系统对轨道方向(横向偏差)的正确测量。
单系统调头误差超过0.5mm时,需要采用‘横向校正’。
功能进入:点击菜单[设置]->[横向校正]
横向校正控制区
测量:在轨道上选取一个用于校正的固定点,并做一标示。
1、点击‘测量按钮’;当测量到数据,某一侧批示灯会亮,数据稳
定后,保存数据;
横向校正测量
2、保存完数据后将小车调向,并将小车对齐标示点;
3、照准棱镜后开始测量,数据稳定后保存数据。
4、两侧数据都测量完毕后,点击‘结束’按钮,取出横向校正功能,
完成所有操作。
存储提示
功能说明:在竣工测量和数据分析时,都希望测量数据是等间隔逐点采集的,因此,当有漏点或重点时系统会给出提示。
功能进入:点击菜单[设置]->[存储提示]
设置:在‘操作控制区’中的测量间距编辑框(操作控制区)中输入测量点间距。
测量:在测量过程中,当有漏点未测量时,系统提示。如果点击‘是’,保存测量数据;点击‘否’,丢弃测量数据不保存。
漏点未保存提示
在测量过程中,当有重复保存测量数据时,系统提示,如果点击
‘是’,保存测量数据;点击‘否’,丢弃测量数据不保存。
重复保存提示
?自定义点号
功能说明:在应用中,保存的数据的点号可能按轨枕号逐点递增或递减,也可能按设计线型点号进行定义,因此进行点号自定义。
功能进入:点击菜单[设置]->[自定义点号]
自定义点号
设置:可以设置点号定义模式及点号增量大小。
测量:测量时按点号定义模式自增或自减。
?显示切换下拉菜单
显示切换按钮中共有【坐标显示】、【施工指示】、【设计数据】、【亮度】、【过
程数据】等五个切换选择。
选择【坐标显示】后,界面切换到坐标显示,数据显示为当前轨道到中线点的三维坐标。
坐标显示
选择【施工指示】后,界面切换到施工指示显示模式,此时界面显示的数据为处理后数据,主要提供了数据实时处理后的结果,用于指导施工过程中的轨道调整。
施工指示
选择【设计数据】后,界面切换到设计数据显示界面,该界面的数据显示了待测线路经过处理后的数据,主要内容为里程、点号等等。
设计数据
选择【过程数据】后,界面切换到过程数据显示界面,该界面的数据显示了重叠段测量数据,现场情况记录等数据。当把鼠标放于温度或弃压的输入框内,
在最下方会出现相应的单位提示:
过程数据
亮度选择是根据工作的时间进行数据显示框下的背景颜色选择,默认情况下是选择的:
选择亮度
没有选择亮度
建议:
为保证测量的精度,一次设站测量距离最好不超过70米。
1.4数据报表精调分析
测量数据输出报表
在系统主界面下单击【数据报表(R)】→【绝对测量成果报表(A)】→【测量数据输出报表(W)】,进入‘测量数据输出报表’界面,在这个对话框中可以选择导出的数据内容、数据长度、小数位数及数据超限标示等,还可根据自己的使用习惯制定数据导出模板,以及数据的精调分析。
如上图所示,在绝对测量成果数据报表(A)中选择测量数据输出报表,出现如下图所示:
1)选择你要的数据库DB文件,如果高程基准为左轨就勾选区间精调试算—左来保存.csv格式,如果高程基准为右轨就勾选区间精调试算—右来保存.csv格式。
2)在绝对测量成果数据报表(A)中选择区间精调分析,出现如下所示:
3)打开上图的验收标准如下图所示
注明:根据铁道部的标准来填写标准
4)做好了验收标准后,再到文件中选择新建调整方案找到你当前的.csv文件导入。
检轨小车使用方法
成都新坐标测绘仪器公司提供 轨检车租赁,全站仪,电子水准仪租赁,徕卡GPR121棱镜 GEDO TRACH 检轨小车 产品说明书
1简介 轨道测量系统GEDO TRACK可以测量轨检小车在轨道上的位置或使用电子传感器做跟踪测量。通过转换连续测量点的坐标和考虑轨距和坡度,在测量的同时可以立即获得铁轨的位置。设计点和实际点的偏差能被连续显示。 软件运行在Trimble TSC2手簿上。TSC2采用Microsoft? Windows? Mobile 5操作系统并支持拥有Trimble S Series的所有仪器。 GEDO Track既可以使用Survey Controller软件(SC软件)导出文件中的最后一个测站(包括坐标、方位角、比例、仪器高等信息)。也可以使用程序自带的参考测站,该测站可以用于进一步坐标估算。 软件布局是根据Survey Controller软件设计,可用性更强。这意味着用户可以直观的适应这个软件并且使用仪器功能就像他熟悉的一样。更深入的了解功能,不熟悉软件的用户可以参阅Survey Controller手册 2安装和许可 2.1安装 1使用ActiveSync 4.1程序和USB数据线把TSC2连接到电脑上。 2拷贝NETCFv2.wm.armv4i.cab文件到手簿上并双击安装 3拷贝格式文件Station report.xsl到手簿上的Trimble Data文件夹 4拷贝GedoCE.cab到手簿上并安装。当你安装这个文件时,这个软件和它的组件将会被自动安装到\Program Files\GedoCE文件夹 5拷贝许可文件到\Program Files\GedoCE文件夹下 现在软件安装完成了。程序可以通过Windows?的开始菜单很简单地启动。 所有工程有关数据将会保存在根目录下的一个特殊文件夹(\Gedo Data) 2.2许可 如果你想完全使用程序,一个特殊的许可文件必须保存到手簿上的程序目录中。许可文件的名字和手簿的串号一样,许可文件的扩展名为.lic 每次启动的时候程序会校验许可文件,如果不能找到有效的许可文件程序只会运行在Demo模式。被测量的点不能保存和评估。 程序与全站仪通讯是通过Trimble Survey Manager软件实现的。此功能需要单独激活。需要在每个控制手簿上装载一个串行码。这个串行码必须被GEDO Track登记。 你可以在Configuration > TSM License 下找到Trimble Survey Manager许可对话框。每次软件被重新安装的时候都必须输入注册码。
自动寻轨小车
摘要:本设计采用AT89S52作为系统控制核心,采用光电传感器来检测信号,用两个步进电机分别驱动后轮,电机驱动采用功率放大管,通过单片机给定的控制信号进行换相,灵活方便地对步进电机的速度和转向进行控制,进而达到控制电动车在黑色轨迹上的运动。关键词:电动车;双步进电机;单片机;光电传感器 1 系统设计 1.1 设计任务和要求 1.1.1设计任务 设计并制作一个自动寻迹小车,小车从安全区域启动,按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处拐弯,实现灵活前进、转弯、倒退等功能。 1.1.2 基本要求 在不加配重的情况下,电动车完成以下运动: (1) 公交车从起始站点A出发,沿着黑色引导线,公交车从起始站点A出发,沿着黑色引导线,到达终点B; (2) 小车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处拐弯,实现灵活前进、转弯、倒退等功能,在轨道上划出设定的地图; (3) 到达指定的目的地后发出声光报警。 0.5米 C 墙壁 B 24厘米 0.375米 30厘米50厘米 30厘米 1.5米 0.375米 30厘米 24厘米 0.375 米 A 1.5米 1.1.3发挥部分
将配重固定在可调整范围内任一指定位置,电动车完成以下运动: (1) 在小车的车头和车尾装上转向灯(黄灯)和停止提示(红灯); (2) 可在小车车身装上LED显示小车的运行状况和语音提示等功能 (3) 其他。 1.2 总体设计方案 1.2.1系统总体设计思路 本系统实现电动车地板上沿黑色轨迹行驶并实时显示车运行状况。总体设计思路如图1所示。系统包括控制器模块、电源模块、信号检测模块、电机及其驱动模块、键盘模块等四部分。 系统工作时,单片机接收传感器的输出信号后输出控制信号,采用黑白线引导、反射式光电传感器检测,使小车在轨道上自动行驶。 1.2.2 方案论证与比较 (1)控制器模块的设计方案论证与选择 方案一:采用FPGA作为系统主控器。FPGA可实现各种复杂逻辑功能,规模大,集成度高,体积小,稳定性好,IO资源丰富、易于进行功能扩展,处理速度快,但适用于大规模实时性要求较高的系统,价格高,编程实现难度大。本系统只需完成信号检测和电机驱动的控制,逻辑功能简单,对控制器的数据处理能力要求不高,故不选择此方案。 方案二:采用嵌入式系统作为主控器。嵌入式系统工作频率较高,速度较快,控制功能很强,也有较强的数据处理能力。但同样价格高,编程实现难度大。 方案三:采用Atmel公司的AT89S52单片机作为主控制器。AT89S52是一个低功耗、高性能8位单片机,片内含8 KB Flash片内程序存储器,256 Bytes RAM,32个外部双向输入/输出(I/O)口,5个中断优先级,2层中断嵌套中断等。价格便宜,使用方便,编程实现难度低,适合用来实现本系统的控制功能。 综上分析,本设计选择方案三。 (2)电机控制模块的设计方案论证与选择 为实现电动车对行走路径的准确定位和精确测量,可考虑以下两种方案: 方案一:采用直流电机。直流电机转动力矩大,体积小,重量轻,装配简单,使用方便。主 要适合于高速电机系统,本系统要求控制精度较高,不易达到。 方案二:采用步进电机。步进电机是数字控制电机,控制也简单,具有瞬间启动和急速停止的优越性,比较适合本系统要求控制精度高的特点。 综上分析,本系统选择方案二。 (3)电机驱动模块的设计方案论证和选择 方案一:采用集成芯片L298N驱动步进电机。L298N是一个具有高电压大电流的全桥驱动芯片,响应频率较高,稳定性较好。但本系统两个电机时序不同,会出现需要不同延时程序的情况,系统处理负荷大,影响电机工作,同时价格相对较高。 方案二:用功率管(如TIP132,8A 70W)构成驱动电路来驱动电机。结构简单,价格低廉, 经测试完全可以驱动电机,完成控制功能。 综上分析,选择方案二。 (4)信号检测模块的设计方案论证和选择 方案一:用光敏电阻组成光敏探测器。光敏电阻原理简单,使用方便,价格低廉,但受光照强度影响很大,可靠性差。 方案二:采用角度传感器。使用角度传感器来测量车体水平方向和竖直方向的角度,感测到
轨检小车测量原理
轨检小车测量原理 技术规格 轨道的任务是确保列车按规定的速度安全平稳不间断运行,因此轨道几何状态亦应保持与列车运行相匹配的规定状态。随着客运专线等高速线路的建设,列车速度将大幅提高,对轨道几何形位标准要求也是越来越高,故而采取动态检测的周期也越来越短,但静态检测还不能完全由动态检测来替代,因为静态检测可随时,测量轨道的几何形位,指导施工和维修作业。列车运行速度越高,轨道几何形位允许偏差越小,传统的轨道检测工具,例如道尺等已不能满足量测精度要求,使用轨检小车测量轨道几何形位势在必行,这也是铁路检测工具现代化的重要标志之一。 使用设备仪器 轨道检测小车是一种检测静态轨道不平顺的便捷工具。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测高低、水平、扭曲、轨向等轨道不平顺参数。国外铁路在动静态不平顺差异较小的高平顺线路、无碴轨道线路,以及在新线施工中,整道、检查铺设精度、验收作业质量时,广泛应用轨道检测小车。 GRP1000测量系统主要由手推式轨检小车和分析软件包两大部分组成。即可单独测量轨道水平,轨距等相对结合参数,也可配合LEICA TPS全站仪来实现平面位置和高程的绝对定位测量,上述绝对定位测量通过全站仪的自动
目标照准功能以及与GRP1000之间持续无线电通讯来完成。 测量外业完成后,系统能产生轨道几何测量的综合报表。用户可根据需要定义报表的输出界面,选择性的输出轨道位置、轨距、水平、轨向(短波和长波)、高低(短波和长波)等几何参数。GRP1000在德国高铁竣工测量、西班牙高铁无碴轨道施工、京津城际轨道第三方检测及武广客运专线施工中得到了很好的应用。 Leica TCRP 1201全站仪 Amberg GRP 1000S
SGJ-T型轨检小车使用说明书
现场水平零点标定 第一步:启动软件,选择【在线测量】菜单下的【标定】子菜单,打开标定对话框。 第二步:标定水平。 进入标定对话框,选择【水平传感器】、【标定零点】、【正切法】,点击【启动】, 如下图。 1)点击【记录】,屏幕提示“请将小车调头”,按提示将小车调头。
2)小车放置平稳后,点击【再记录】 3)小车放置平稳后,点击【停止】 现场轨距零点标定 注明:要借用标准合格的轨距迟才能完成
1.1 系统参数设置 在进入定点测量前,需要检查系统的相关参数设置,如果系统参数设置不正确,会直接影响最终的测量结果,及操作的顺畅。 单击【设置】→【绝对测量系统设置】→【系统参数设置】,进行绝对测量参数的设置。 系统参数设置 1、设站类型:选择是全站仪独立完成设站还是全站仪在小车控制下完成设站; 2、设站加密基桩数:选择设站所且的CP3基桩点的个数; 3、全站仪类型选择:对系统中所采用的全站仪的品牌进行设置; 4、棱镜高:对小车棱镜高的设置,建议不要更改,以设备出厂文件为准;
5、棱镜与右轨作用力偏差:此参数影响轨道方向(横向偏差)的测量,当方向 的调头差较大时,以‘横向校正’功能对此参数进行校正; 6、棱镜中心偏差:此参数为补偿棱镜光学中心偏差,提高轨道方向的测量精 度。建议不要更改系统所配置好的棱镜和此参数,否则及时与厂家联系; 7、【默认值】按钮,用默认值作为各参数设置值; 8、点击【0K】按钮完成测量设置。 1.2 系统操作 系统操作主要用于完成软件系统的文件打开、文件关闭、操作员权限管理及软件系统的退出关闭。 核对密码前 核对密码后 【核对密码】该功能是用于用户权限的管理,在RailCheck XP中用户权限被分为两种,一种是管理员权限,一种是操作员权限。点击后将弹出对话框要求输入相应密码,软件初始时已经设置了密码,初始密码设为88888888。密码的修改参考下面【修改密码】中的描述。
轨检小车测量原理
轨检小车测量原理 轨道检测小车是一种检测静态轨道不平顺的便捷工具。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测高低、水平、扭曲、轨向等轨道不平顺参数。国外铁路在动静态不平顺差异较小的高平顺线路、无碴轨道线路,以及在新线施工中,整道、检查铺设精度、验收作业质量时,广泛应用轨道检测小车。 GRP1000测量系统主要由手推式轨检小车和分析软件包两大部分组成。即可单独测量轨道水平,轨距等相对结合参数,也可配合LEICA TPS全站仪来实现平面位置和高程的绝对定位测量,上述绝对定位测量通过全站仪的自动目标照准功能以及与GRP1000之间持续无线电通讯来完成。 测量外业完成后,系统能产生轨道几何测量的综合报表。用户可根据需要定义报表的输出界面,选择性的输出轨道位置、轨距、水平、轨向(短波和长波)、高低(短波和长波)等几何参数。GRP1000在德国高铁竣工测量、西班牙高铁无碴轨道施工、京津城际轨道第三方检测及武广客运专线施工中得到了很好的应用。 Leica TCRP 1201全站仪 Amberg GRP 1000S
GRP1000轨道测量系统的测量原理 GRP1000轨检小车精度如下: 项 目 精 度 里程 光电记数器测量方式 测量误差 < 0.5% 里程分辨率 ±5mm 轨距(mm) 1435 轨距传感器量程 -25mm~+65mm 轨距传感器精度 ±0.3mm 水平传感器量程 -10°~+10°换算成高差±225mm 水平传感器精度 ±0.5mm 水平位置和高程测量精度 ±1mm
1.检测内容及方法 1)中线坐标及轨面高程 轨道中线坐标和轨面高程的检测,是对线路轨道工程质量状况的最基本的评价。通过检测轨道实测坐标和高程值与线路设计值进行比较得出的差值,可以全面直观的反映轨道工程质量。 在进行轨道中线坐标和轨面高程检测时,使用高精度全站仪实测出轨检小车上棱镜中心的三维坐标,然后结合事先严格标定的轨检小车的几何参数、小车的定向参数、水平传感器所测横向倾角及实测轨距,即可换算出对应里程处的中线位置和低轨的轨面高程。进而与该里程处的设计中线坐标和设计轨面高程进行比较,得到实测的线路绝对位置与理论设计之间的差值,根据技术指标对轨道的绝对位置精度进行评价。 坐标换算中所用到的轨检小车独立坐标系示意图如下。 轨检小车独立坐标系示意图 2)轨距检测 轨距指两股钢轨头部内侧轨顶面下16mm处两作用边之间的最小距离。轨距不合格将使车辆运行时产生剧烈的振动。我国标准轨距的标称值为1435mm。在轨距检测时,通过轨检小车上的轨距传感器进行轨距测量。 轨检小车的横梁长度须事先严格标定,则轨距可由横梁的固定长度加上轨距传感器测量的可变长度而得到,进而进行实测轨距与设计轨距的比较。
GRP1000轨检小车测量基础学习知识原理
GRP1000轨检小车测量原理 技术规格 轨道的任务是确保列车按规定的速度安全平稳不间断运行,因此轨道几何状态亦应保持与列车运行相匹配的规定状态。随着客运专线等高速线路的建设,列车速度将大幅提高,对轨道几何形位标准要求也是越来越高,故而采取动态检测的周期也越来越短,但静态检测还不能完全由动态检测来替代,因为静态检测可随时,测量轨道的几何形位,指导施工和维修作业。列车运行速度越高,轨道几何形位允许偏差越小,传统的轨道检测工具,例如道尺等已不能满足量测精度要求,使用轨检小车测量轨道几何形位势在必行,这也是铁路检测工具现代化的重要标志之一。 使用设备仪器 轨道检测小车是一种检测静态轨道不平顺的便捷工具。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测高低、水平、扭曲、轨向等轨道不平顺参数。国外铁路在动静态不平顺差异较小的高平顺线路、无碴轨道线路,以及在新线施工中,整道、检查铺设精度、验收作业质量时,广泛应用轨道检测小车。 GRP1000测量系统主要由手推式轨检小车和分析软件包两大部分组成。即可单独测量轨道水平,轨距等相对结合参数,也可配合LEICA TPS全站仪来实现平面位置和高程的绝对定位测量,上述绝对定位测量通过全站仪的自动
目标照准功能以及与GRP1000之间持续无线电通讯来完成。 测量外业完成后,系统能产生轨道几何测量的综合报表。用户可根据需要定义报表的输出界面,选择性的输出轨道位置、轨距、水平、轨向(短波和长波)、高低(短波和长波)等几何参数。GRP1000在德国高铁竣工测量、西班牙高铁无碴轨道施工、京津城际轨道第三方检测及武广客运专线施工中得到了很好的应用。 Leica TCRP 1201全站仪 Amberg GRP 1000S
长吉城际轨检小车教案
长吉城际轨检小车培训教案 第一章轨检小车测量原理 Ⅰ技术规格 轨道的任务是确保列车按规定的速度安全平稳不间断运行,因此轨道几何状态亦应保持与列车运行相匹配的规定状态。随着客运专线等高速线路的建设,列车速度将大幅提高,对轨道几何形位标准要求也是越来越高,故而采取动态检测的周期也越来越短,但静态检测还不能完全由动态检测来替代,因为静态检测可随时,测量轨道的几何形位,指导施工和维修作业。列车运行速度越高,轨道几何形位允许偏差越小,传统的轨道检测工具,例如道尺等已不能满足量测精度要求,使用轨检小车测量轨道几何形位势在必行,这也是铁路检测工具现代化的重要标志之一。 Ⅱ使用设备仪器 轨道检测小车是一种检测静态轨道不平顺的便捷工具。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测高低、水平、扭曲、轨向等轨道不平顺参数。国外铁路在动静态不平顺差异较小的高平顺线路、无碴轨道线路,以及在新线施工中,整道、检查铺设精度、验收作业质量时,广泛应用轨道检测小车。 GRP1000测量系统主要由手推式轨检小车和分析软件包两大部分组成。即可单独测量轨道水平,轨距等相对结合参数,也可配合LEICATPS全站仪来实现平面位臵和高程的绝对定位测量,上述绝对定位测量通过全站仪的自动目标照准功能以及与GRP1000之间持续无线电通讯来完成。 测量外业完成后,系统能产生轨道几何测量的综合报表。用户可根据需要定义报表的输出界面,选择性的输出轨道位臵、轨距、水平、轨向(短波和长波)、高低(短波和长波)等几何参数。GRP1000在德国高铁竣工测量、西班牙高铁无碴轨道施工、京津城际轨道第三方检测及武广客运专线施工中得到了很好的应用。 LeicaTCRP1201全站仪AmbergGRP1000S Ⅲ GRP1000轨道测量系统的测量原理 GRP1000轨检小车精度如下: 项目精度 里程光电记数器测量方式测量误差<0.5% 里程分辨率±5mm 轨距(mm) 1435 轨距传感器量程-25mm~+65mm 轨距传感器精度±0.3mm 水平传感器量程-10°~+10°换算成高差±225mm 水平传感器精度±0.5 水平位臵和高程测量精度±1mm Ⅳ检测内容及方法 1) 中线坐标及轨面高程 轨道中线坐标和轨面高程的检测,是对线路轨道工程质量状况的最基本的评价。通过检测轨道实测坐标和高程值与线路设计值进行比较得出的差值,可以全面直观的反映轨道工程质量。在进行轨道中线坐标和轨面高程检测时,使用高精度全站仪实测出轨检小车上棱镜中心的三维坐标,然后结合事先严格标定的轨检小车的几何参数、小车的定向参数、水平传感器所测横向倾角及实测轨距,即可换算出对应里程处的中线位臵和低轨的轨面高程。进而
轨检小车管理办法
邯济铁路有限责任公司文件 邯济铁技〔2014〕63号 邯济铁路公司关于下发《邯济铁路轨道检查仪使用管理办法(暂行)》的通知 各维修段并工区: 轨道检查仪的运用,替代了传统手工检测方式,极大提高了检测效率、检测精度、管理效率等,实现了轨道检测信息化、数字化、标准化的技术目标。为加强、规范轨道检查仪的使用与管理,现根据公司实际情况,特制定《邯济铁路轨道检查仪使用管理办法(暂行)》,请各单位认真遵照执行。 本经营性文件目录登记编号:HJJG/JG-2014-007-01 邯济铁路公司
2014年8月25日邯济铁路轨道检查仪使用管理办法(暂行) 第一章总则 1.1轨道检查仪(以下简称轨检仪)对轨距、水平、方向、高低和三角坑的检测具有良好的测量准确度、重复率,并且能直接测量曲线正矢。与道尺加弦绳的人工检查相比,轨检仪能连续检测,且具有检测速度快、效率高、项目全及节省劳动力的优点,还可通过计算机软件对检测数据进行全面的分析,能更有效地指导线路养护工作。 为加强、规范轨检仪的使用与管理,保证轨检仪安全、有序、正常使用,特制定本办法。 1.2 本办法适用于邯济铁路线路专业,对轨检仪的使用与管理。 第二章组织机构 2.1公司成立轨检仪使用管理领导小组. 组长:主管副总经理 组员:安全管理部部长,技术管理部部长、物资设备部部长、各综合维修段段长。 2.2轨检仪检查领导小组的主要职责是:制定本单位轨检仪使用管理办法;对轨检仪检查数据进行分析;在分析轨检仪检查
数据的基础上,对各综合维修段轨检仪检查小组进行技术指导;负责轨检仪的设备送检、送修;对轨检仪检查过程中发现的问题进行收集,及时向公司和轨检仪生产厂家报告。 2.3轨检仪检查领导小组应指派专人负责对轨检仪的日常管理,应做到人员固定、责任到位。 2.4各维修段应以各检修工区为单位成立轨检仪检查小组,设组长(工长)1名,负责轨检仪操作、检测数据的分析处理和轨检仪的管理。设轨检仪操作手1名,协助组长工作。 轨检仪检查时,前后各设防护员1名,另设随车防护员和驻站联络员各1名,轨检仪检查小组对线路检测数据的准确性和真实性负责。 轨检仪检查严格按逆列车运行方向进行作业;轨检仪在天窗点内或天窗点外均可上道作业,上道前驻站联络员在车站行车室登记,上道时在轨检仪前、后、随车均设置防护员,轨检仪作业时3-5分钟与驻站联络员通话一次,了解列车运行情况。 前、后防护员距轨检仪距离不少于800米,并在线路外侧路肩上随轨检仪检查进度移动;随车防护员距轨检仪距离10-15米,并在线路道心随轨检仪检查进度移动。 第三章检查周期及内容 3.1轨检仪检查线路周期:邯济正线为每月2遍,当月有轨检车检查的可减少1遍,检查时间:首次检查定于每月的28日-次月5日,第二次检查定于每月14日-20日,两次设备检查周期
轨检小车选项设置和全站仪操作流程
轨检小车选项设置和全站仪操作流程
一、 精调机软件选项设置 1.1 软件设置
打开软件,进入如下界面,如下图:
点击软件设置中的‘选项’对话框,会弹出一个界面,界面包括‘常规’‘通讯’ 、 、 ‘限差’‘测量数据’‘全站仪’和‘断面仪’ 、 、 ,其中前 5 个项目跟精调设置有关。每个 界面的设置具体如下:
‘常规’选项设置:
‘通讯’选项设置:
‘限差’选项设置:
‘测量数据’选项设置:
‘全站仪’选项设置:
‘断面仪’选项不用进行设置,以上各个选项及其基本设置情况就是如此,不需要 进行改动。需要注意的地方是通讯选项中精调机通讯的端口是 14,波特率为 115200(波 特率应和全站仪、通信猫一致) ,小车内部传感器端口为 11。 当遇见版本语言、角度单位、长度单位等等显示的和你需要的不一样,需要在‘本地 化’选项中进行更改。我们推荐的设置如下图:
当导入 TXT 控制点文件时,点击‘数据导入’选项,进入如下界面,
‘数据文件类型’ 选择控制点 (ASCII-GSI) 然后导入后缀为 TXT, , 导入时先点击 ‘输 入文件名’右侧的文件夹图标,要选择 ALL FILES 才能看见你的 TXT 文件。加载完文件后 点击导入, 是否成功会有显示, 若未成功请检查你的控制点文件坐标格式是否正确, 格式: 点号 东坐标 北坐标 高程
1.2 测量项目设置
每个‘测量项目’都有设计的数据,轨检小车需要的设计数据有平曲线、竖曲线、 设计超高。平曲线需要 ZH 点、HY 点、YH 点、HZ 点四大桩坐标,曲线半径,缓和曲线长, 曲线半径左偏为‘-’ ,右偏为‘+’ ;竖曲线需要竖曲线的半径,变坡点里程、变坡点高 程数据,竖曲线上凸为正,下凹为负。超高需输入 ZH 点、HY 点、YH 点、HZ 点里程及设 计超高,沿着里程增大的方向左超高为‘+’ ,右超高为‘-’ 。
轨检小车测量
目录 1、概况 (1) 2. 检测内容及方法 (2) 1) 中线坐标及轨面高程 (2) 2) 轨距检测 (3) 3) 水平(超高)检测 (4) 4) 轨向/高低检测(中国标准) (5) 5) 短波和长波不平顺(德国标准) (5) 3. 工作流程 (7) 4.符号规则 (14) 5. 轨道精调测量质量控制措施 (15) 6.常见问题与处理 (18)
轨检小车测量 1、概况 轨道检测小车是一种检测静态轨道不平顺的便捷工具。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测高低、水平、扭曲、轨向等轨道不平顺参数。国外铁路在动静态不平顺差异较小的高平顺线路、无碴轨道线路,以及在新线施工中,整道、检查铺设精度、验收作业质量时,广泛应用轨道检测小车。 Leica TCRP 1201 全站仪 Amberg GRP 1000 轨道测量系统的测量原理 GRP1000 测量系统主要由手推式轨检小车和分析软件包两大部分组成。即可单独测量轨道水平,轨距等相对结合参数,也可配合LEICA TPS 全站仪来实现平面位置和高程的绝对定位测量,上述绝对定位测量通过全站仪的自动目标照准功能以及与GRP1000 之间持续无线电通讯来完成。
报表的输出界面,选择性的输出轨道位置、轨距、水平、轨向(短波和长波)、高低(短波和长波)等几何参数。 GRP1000 轨检小车精度如下: 2. 检测内容及方法 1) 中线坐标及轨面高程 轨道中线坐标和轨面高程的检测,是对线路轨道工程质量状况的最基本的评价。通过检测轨道实测坐标和高程值与线路设计值进行比较得出的差值,可以全面直观的反映轨道工程质量。