高光谱目标检测文献综述

基于核方法的高光谱图像目标检测技术研究
----文献选读综述报告
1前言
20 世纪80 年代遥感领域最重要的发展之一就是高光谱遥感的兴起。从20 世纪90 年代开始,高光谱遥感已成为国际遥感技术研究的热门课题和光电遥感的最主要手段。高光谱遥感图像目标检测在民用和军事上都具有重要的理论价值和应用前景,是当前目标识别及遥感信息处理研究领域中的一个热点研究问题。
2 研究目的及意义
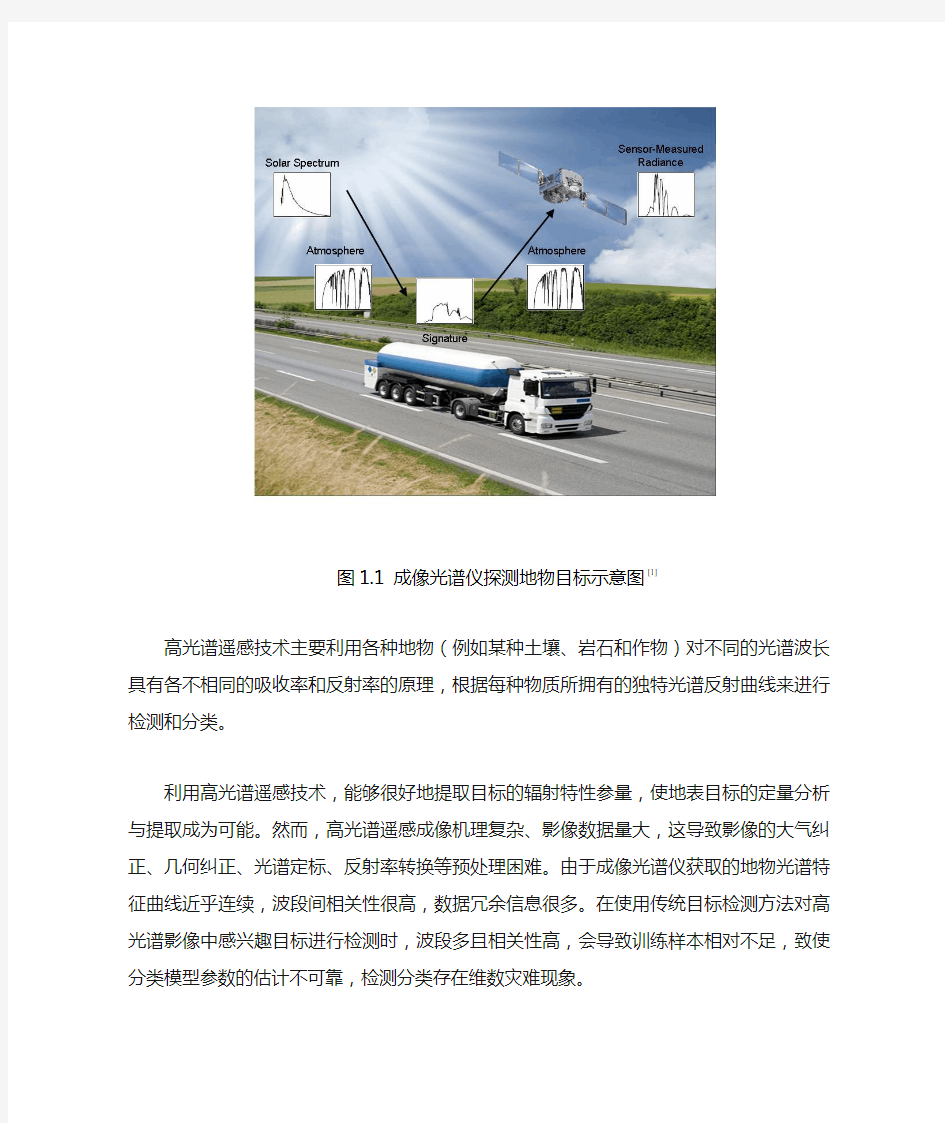
高光谱遥感图像是在电磁波谱的紫外、可见光、近红外和中红外区域,利用成像光谱仪获取的许多非常窄且光谱连续的图像数据(如图1.1所示)。成像光谱仪为每个像元提供数十至数百个窄波段(通常波段宽度小于10 nm)的光谱信息,能产生一条完整而连续的光谱曲线。
图1.1 成像光谱仪探测地物目标示意图[1]
高光谱遥感技术主要利用各种地物(例如某种土壤、岩石和作物)对不同的光谱波长具有各不相同的吸收率和反射率的原理,根据每种物质所拥有的独特光
谱反射曲线来进行检测和分类。
利用高光谱遥感技术,能够很好地提取目标的辐射特性参量,使地表目标的定量分析与提取成为可能。然而,高光谱遥感成像机理复杂、影像数据量大,这导致影像的大气纠正、几何纠正、光谱定标、反射率转换等预处理困难。由于成像光谱仪获取的地物光谱特征曲线近乎连续,波段间相关性很高,数据冗余信息很多。在使用传统目标检测方法对高光谱影像中感兴趣目标进行检测时,波段多且相关性高,会导致训练样本相对不足,致使分类模型参数的估计不可靠,检测分类存在维数灾难现象。
因此,高光谱影像给地物分类识别带来了巨大机遇,同时给传统的目标检测方法也带来了挑战。为了充分发挥高光谱遥感技术的优势,必须在影像检测分类基本算法的基础之上,结合高光谱影像分类的特点,研究新的适用于高光谱影像的理论、模型和算法〕。在国内外,许多研究机构在理论和应用上进行了探索,取得了不少成果。
自从上世纪90年代中期核方法在支持向量机分类中得到成功应用以后,人们开始尝试利用核函数将经典的线性特征提取与分类识别方法推广到一般情况,在理论和应用中都有许多成果,引起了继经典统计线性分析、神经网络与决策树非线性分析后第三次模式分析方法的变革,成为机器学习、应用统计、模式识别、数据挖掘等许多学科的研究热点,在人脸识别、语音识别、字符识别、机器故障分类等领域得到成功应用[2]。
基于核方法的非线性特征提取与分类,为高光谱影像分析提供了一条新的途径。
3 核方法理论发展概况
3.1 核理论基础
核的理论比较古老,Mercer定理可追溯到1909年,早在20世纪40年代,A.N.Kolmogorov和N.Aronszajn就已经开展了有关再生核理论的研究。该理论最早被引入机器学习领域是在1964年,M.Aizermann、E.Bravermann和L.Rozoener在势函数方法中应用Mercer定理把核解释为特征空间中的内积。1975年Poggiio首次用到了多项式核函数,然而一直到20世纪90年代中期,B.Boser、I.Guyon和V.N.Vapnik提出支持向量机(SVM)算法后,该理论的实际价值才开始被人们所广泛认识。并且在经过B.Scholkopf等人后续的工作以后,逐渐形成了如下的“核技巧”:任何一个只依赖于内积的算法都可以被“核化”[3]。
近年来核方法和基于核函数的算法在许多领域都获得了重要的应用。这些应用主要包括图象和计算机视觉(人脸识别、手写体识别等),文本分类,生物信息
技术领域(基因微阵列数据分析、蛋白质数据的分析,DNA数据的分析等),时间序列预测等等。在高光谱图象处理领域,基于核的机器学习算法已经受到了越来越多的重视,并己经取得了较多应用[4]。
核方法就是针对低维空间d
R中的非线性问题,通过非线性变换Φ将低维空间数据映射到高维空间H中,进而转化为高维空间中的线性问题解决。由于非线性变换Φ形式通常比较复杂,即便知道了Φ的形式,高维空间H的维数通常也是很高的(可能无穷维),因此,直接使用非线性变换的思想很难实现。核方法的的绝妙之处在于:针对这个问题,核方法运用统计学理论中的Mercer条件,提出了实现上述非线性映射思想的方法,即高维空间中的内积运算转化为输入空间的向量运算实现:(,)()()
=
x z x z。因此,核方法避免了确定非线性映
kΦΦ
射的具体形式,并且也大大降低了计算量和复杂度。
核函数方法的实施步骤:
1.收集和整理样本,并进行标准化;
2.选择或构造核函数;
3.用核函数将样本变换成为核矩阵;
4.在特征空间对核矩阵实施各种线性算法;
5.得到输入空间中的非线性模型。
其中,第3步求解核矩阵的过程相当于将输入数据通过非线性函数映射到高维特征空
间核矩阵作为信息瓶颈,成为数据输入和学习算法之间的界面,不仅是核机器的设计和分析方面的中心概念,而且被认为是核机器实现方面的中心数据结构。
核方法之所以能够得到广泛应用,是因为其具有以下特点[5]:
1.核函数的引入避免了传统模式分析方法遇到的“维数灾难”,大大减小了计算量。输入空间维数对核矩阵无影响,因此,核函数方法可以有效处理高维输入。
2.无需求解非线性变换映射的具体形式和参数,减小算法的复杂度。
3.核函数的形式和参数的变化会隐式地改变从输入空间到特征空间的映射,进而对特征空间的性质产生影响,最终改变各种核函数方法的性能。
4.核方法可以与不同分析算法相结合,形成不同的基于核函数的算法,且这两部分可以单独进行设计,可以为不同的应用选择不同的核函数和算法。
从计算的角度来看,核方法有两个重要的性质。首先,他们能够以在空间上和时间上都较低的计算代价,处理高维的和相应灵活的特征空间中的问题;其次,尽管结果得到的函数比较复杂,但一般都是解凸优化问题,而不会受到局部极小化的困扰。从实现的角度来看,内存限制意味着对于很大的数据集,把整个
核矩阵装入内存是不可能的,在这种情况下,算法中用到核矩阵中元素的值,需要随时通过核函数计算得到。这就会影响到算法选择和实现细节。
3.2 现有常用核函数极其构造
常用的核函数如下:
1.高斯核函数:
2
2(,)exp(),2k σ
-=-x z x z 其中σ为核参数。 2.多项式核函数:
T (,)(),b k a c =+x z x z 其中a c 、b 、、
为核参数。 3.Sigmoid 核函数:
)t a n h (),(βα+=z x z x k T ,其中α、β为核参数。
其中,高斯核函数是最常用的。另外,梅锋在2009年提出一种新型光谱相似度量核,该方法对于因光照强度变化,阴影和遮挡等引起的同种地物光谱变化的适应性较强,有利于改善基于核方法的高光谱异常检测算法的性能。
4 高光谱目标检测国内外研究现状
4.1 国外研究现状
目前国内外很多专家学者对于高光谱遥感目标探测进行了深入研究,可归结为4 个大类算法。
4.1.1 投影法
投影法主要是美国马里兰大学的教授Chang 的研究小组在开展此项研究。投影法主要包括正交子空间投影(orthogonal subspace projection)、投影寻踪法
(Projection Pursuit) 和凸面几何体投影变换(convex geometry projection)等3 类典型算法。
1994 年,Chang 等提出了正交子空间投影法[6]。其基本思想是将每个像元向量映射到一个子空间中,在这个子空间中,非理想特征是正交的。这个作法在最小二乘意义上是最优的干扰抑制过程。一旦干扰特征归零,将其他特征映射到感兴趣特征上,得到最大化信噪比并获得一个单一成分图像,即感兴趣目标的分类图。OSP 操作子可以扩展到k 个感兴趣特征,这样在降低了k 的维数的同时给高光谱图像进行了分类。该方法适用于纯像元和混合像元目标探测和分类,如探矿、识别植被等。
投影寻踪法的研究起始于20 世纪70 年代,是由Friedman 教授提出的一种专门对高维数据线性降维的数据处理方法。投影寻踪的基本思想为:将高维数据空间按照某种兴趣结构线性投影到低维子空间中,进而达到在低维子空间中分析
和研究数据的目的。Jimenenz 等于2000 年将投影法和遗传算法应用到高光谱数据特征提取和分类中[7]。其过程为:利用投影矩阵,将相邻的波段分组,然后将每组内各个特征波段投影到一个特征。通过投影有效地减小数据维,为后续的分析和处理提供方便。但是求取投影矩阵的过程较为复杂。投影法适用范围为纯点像元和混合像元目标探测,如矿石和植被。也能发现图像中目视不可见的异常点。
Chang 等于1999 年提出了凸面几何是描述和处理凸集(convex sets)的几何[8]。凸面几何体投影变换法解决的问题:将高维的几何体投影到感兴趣的低维空间上,以突显和压抑某些特征,实现图像上的目标识别和分类,它是一种正交投影变换,能够用来进行特征选择和提取、高维数据降维等。表达式为Y= ATX,其中X和Y分别为变换前后的数据矩阵。凸面几何体投影变换法适用范围:纯点和混合像元目标探测与分类,适合于区分不同材质的目标。
4.1.2 约束法[9]
基于约束的方法来源于数字信号处理中的线性约束最小方差波束形成器(Linearly constrained minimized variance adoptive beam-forming)。该方法又称为Frost波束形成算法,它是根据阵列接收数据的统计特性,对权向量加以线性约束,使波束形成器在信号方向保持单位响应的同时,输出功率达到最小。
Chang 的研究小组对此类算法进行了深入研究,并提出了一系列新方法和改进算法。Harsanyi 于1993 年提出了约束能量最小目标探测法(CEM)。CEM 来源于数字信号处理领域中的线性约束最小方法波束形成器,该方法的思想为提取特定方向的信号而衰减其他方向的信号干扰。与OSP 相比,前者需要图像目标的完全的先验知识,而CEM 仅需要理想目标的先验知识。因此OSP可用于图像中所有目标的识别分类,而CEM 滤波器仅能用来探测理想目标。CEM 在小目标探测方面取得了广泛的应用,但是随着目标像元数目的增多,它的探测效果显著下降,对于大目标,CEM 几乎没有什么效果。CEM 算法适用范围:探测图像中的小目标,如草地上不同材质的板材。缺点是仅能探测理想目标。
Chang 等提出了目标约束干扰最小滤波器(Target-Constrained Interference- Minimized Filter,TCIMF)方法。TCIMF 解决的问题:能将非理想目标与理想目标进行区分,所以TCIMF能够在去除非理想目标的同时,探测到理想的目标并将干扰效应最小化。TCIMF假设图像像元由三个分离的信号源组成,即D(理想目标),U(非理想目标),I(干扰)。TCIMF 通过应用一个约束向量来同时约束D和U,以使得在去除U 中的非理想目标的同时,可以探测到D 中的理想目标。TCIMF 适用的范围:TCIMF方法由于不仅使用了欲探测目标的信息,而且也应用了欲删除的目标的信息,因而其探测效果好于CEM 方法。适用于纯点和混合像元目标探测,如板材。TCIMF方法还适合逐行的实时处理。
在TCIMF的基础上,Chang 等又提出了线性约束最小方差(Linearly constrained minimum variance , LCMV)方法。其原理为:设计一个有限响应滤波器来通过目标,同时应用一些线性约束使来自未知信号源的方差最小化。LCMV 的优点为:(1) 不需要图像内的自然背景特征或干扰的知识,这些未知干扰可在滤波器输出端最小化。(2) LCMV 的滤波器结构可使用QR 分解。LCMV 方法适用范围:实时处理纯点和混合点像元目标,如矿石、植被的区分和草地上不同材质的板材的探测。
Chang 等于2004 年提出了高光谱目标探测的信号分解和干扰消除(Signal-decomposed and Interference-annihilated, SDIA) 的方法。Chang 等将人造目标看作是未知信号源,这些目标不能通过目视或者先验知识来分辨,称其为干扰(interferers)。在许多应用中,感兴趣的信号可以被进一步的分成理想信号和非理想信号,理想信号是要提取的,为了提高信号可探测性,就要去除非理想信号。通过提出的SDIN 模型,基于正交子空间投影的模型和信号/背景/噪声模型在特殊情况下,可以被包括进来。SDIA 方法解决的问题:该方法将干扰因素和非理想信号作为其他的信号源,这些信号源在目标探测之前是可以被去除的。通过应用SDIA,Chang 等提出了一个信号分解干扰/噪声(SDIN)模型。SDIA 法适用的范围:纯点和混合像元的目标探测,如草地上不同材质的板材。
4.1.3 匹配法
匹配法在信号处理中属于经典算法。近年来,匹配法在高光谱目标探测中也得到了很好的研究和应用。
广义似然比测试法(GLRT)由Kelly 于1986 年提出。该方法是在信号探测模型基础上构建起来的二值假设, 解决了在非高斯背景噪声情况下的目标探测
问题。在检测过程中图像的每个像素被指定为目标或者非目标。为了使GLRT 能够获得一个解析形式,信号探测模型中的噪声一般假设为高斯白噪声。Chang 等所做的实验给出了OSP 和GLRT 的比较[16,17]。GLRT 适用范围:纯点和混合像元目标探测,如植被间的区分。但探测的结果易受噪声影响。
美国陆军研究实验室(U.S. Army Research Laboratory)的Heesung Kwon和Nusser M. Nusrabadi 等提出的一系列的基于核的目标探测算法,这些算法有核自适应子空间探测器(Kernel Adaptive Subspace Detector,KASD)[10]、核匹配子空间探测器(Kernel matched subspace detector)[11],核正交子空间投影(Kernel Orthogonal Subspace Projection)[12],核光谱匹配滤波器(Kernel Spectral Matched Filter),核RX(Kernel RX)算法等。核方法的重要意义在于:它能够使原有的点积算法具有更好的非线性数据处理能力,将原始数据映射到高维特征空间内,使映射后的数据具有较好的线性结构,提高算法的非线性处理能力。
4.1.4 掩模法
掩模法是指构造一个小窗口,将欲探测的目标包含在内,在整个图像上进行移动以寻找目标,此方法类似于滤波中的滤波算子。掩模法的代表有RX 算法、双窗特征值变换(dual window-based eigen separation transform)、嵌套空域窗目标探测方法(NSWTD)等。
RX 算法是从Kelly、Reed 和Yu 提出的广义似然比检测(GLRT)算子推导而来的,它是一种基于目标替代模型的目标探测算子。在RX 算法中,只需要数据的相关矩阵R,而不需要任何其他后验信息。因此,它的算子形式对于每个象素点都是不同的。由于没有使用任何波谱信息,RX 算法的实用性较强。但是在实际数据处理中,它是建立在多元正态分布的基础上,由于原始数据通常表现为多个正态分布的组合,因此RX 算法更适合于用在局部范围里的异常检测。另外,由于算子是能量检测算子,对于相对背景差异不明显的异常(弱异常),其检测效果不理想。
Chang 等提出了嵌套空域窗目标探测方法(NSWTD)[13]。该方法可以在没有先验知识的情况下,去探测细微的目标,特别是在感兴趣的目标非常微小(insignificant)并且以低概率发生的情况下。NSWTD 的原理为:应用3个窗,前两个窗(内窗和中间窗)分别用来提取小目标和大目标,而外窗用来描述背景。在DWEST(内窗7/外窗13)中,应用内窗的目标为获取窗内的目标,而外窗的目的是建立目标的背景模型,以使得通过映射的特征值的最大的几个来获取目标。NSWTD与DWEST和RXD 之间的一个差别在于应用了3个窗;另外一个差别在于:它没有使用DWEST 中的特征向量映射和RXD 中的协方差矩阵,而使用了正交投影差异方法(OPD)。NSWTD法适用的范围:纯点像元和混合像元目标探测,如草地上的车辆和板子。
除了以上四大类方法,Antonio Plaza 等提出了基于扩展形态轮廓(Extended Morphological Profiles)的方法[14]。目前的大多数算法将高光谱的谱信息和空间信息分别处理,而扩展形态轮廓的方法将空间维和光谱响应相结合并同时处理,对纯像元或者混合像元进行分类,并应用了数学形态学理论。所提出方法的性能通过与其他知名的纯像元或者混合像元分类器进行比较,并使用仿真的和真实的由NASA/JPL-AVIRIS 和DLR-DAIS 7915成像光谱仪获得的高光谱数据来验证算
法的有效性。该方法为非监督方法,纯点和混合像元都可检测,如植被和树木的探测。扩展形态轮廓方法虽然使用了形态学的方法来进行特征提取,但是在结果图像中仍有部分冗余,因此,可以考虑用更好的特征提取算法,如决策边界(Decision Boundary) 特征提取或者判决分析(Discriminant Analysis)特征提取方法来对特征进行更为有效的提取,以提高地物识别的效果。
Bittencourt 等提出了对数判别法对光谱相近的地物进行区分的方法。由于对数函数是线性的,类别之间的边界也是线性的,所以超平面可以很好地将类别分开。对数判别并不需要知道变量的概率分布的特定形式,也比一些著名的分类算法比如最大似然分类有着更好的通用性。而且需要估计的参数数量相对较少,所以训练样本的数量也较小。
4.2 国内研究现状
国内对于利用高光谱遥感进行目标探测的研究刚刚起步。
谷延峰等提出了基于多分辨率图像融合的非监督目标检测算法[15]。并应用100×100 像素大小的AVIRIS数据进行了实验,实验结果表明所提出的融合方法对于高光谱图像的目标探测非常有效。所提出的方法检测出更多的真实目标,并且比USRX 和CSRX 有更低的错误探测概率。
吴波等提出了非监督正交子空间投影法(UOSP),用来自动获取影像端元光谱, 同时进行混合像元分解, 而且克服了传统技术需要先验端元光谱的缺点。并用成像光谱数据(PHI)实例测试了这个方法, 结果表明该方法自动获取的端元比较合理, 且分解混合像元的精度较
高。
李智勇等提出了一种基于图像主成分分量的高光谱小目标检测算法[16]。将之应用于128 波段的OMIS的目标探测,目标为7个车辆,最终获得了比RX 算法好的结果。该方法对先验光谱信息的依赖较小,因此实用性较高。
张兵等提出了在光谱特性提取的基础上利用凸面几何体投影变换进行高光谱图像目标探测的方法,并成功地应用于亚运村建材市场屋顶板材和亚运村中心地区真假草坪的自动识别和探测中[17]。实验证明该方法不需要探测目标的任何先验知识就能达到比较好的目标探测效果。
路威等提出了一种基于多分辨率小波高频特征系数的高光谱遥感影像亚像素目标识别方法[18]。通过38种小波函数的高光谱数据实验证明该方法对亚像素目标的识别效果较好。
刘凯龙等提出了以光谱特性作为基本识别特征,针对多类判别和谱空间模式重叠的情况,提出数学分析模型及统计计算和判别效果检验相结合的光谱特征检测新方法,并成功地对迷彩伪装进行了探测,识别正确率达到了99%以上[19]。该方法的优点是充分地利用了高光谱遥感光谱细致的优点,但该方法需要已知大量的地物标准光谱曲线和和伪装的光谱曲线,这在实际应用中是很难获得的。耿修瑞概括性总结了高光谱遥感图像小目标探测算法的研究进展, 揭示了图像白化处理是诸多算法能够成功应用于小目标探测的本质原因所在;提出了基于样本加权自相关矩阵把大目标转化为“小”目标从而进行有效探测的思想和算法。
贺霖等针对背景和目标的先验光谱特征未知的条件,给出一种基于单似然检验的高光谱图像小目标检测器[20]。该检测器避免了统计模型误差和不明确物理含义特征对实际高光谱图像数据检测带来的影响。
5 基于核方法的高光谱图像目标检测研究面临的困难与挑战
1.核函数及其参数的选择缺乏理论指导。核方法的使用,伴随着构造一个核函
数。核函数构造、核函数类别选择、核函数参数选择统称为模型选择。核函数的选择直接影响着分类器的性能,但是如何针对特定问题选择和构造合适的核函数,如何根据实际样本数据确定核函数的参数等问题,缺乏相应的理论指导。虽然已有一些研究者对利用先验知识限制核的选择进行了一些研究,但如何针对特定问题选择最佳核仍是一个难以解决的问题。
2.基于核方法的高光谱目标检测算法尽管通过核函数将高维特征空间点积转移
到输入空间进行计算,避免了高维特征空间的复杂计算的难题,但相对于线性检测算法来讲,基于核方法的检测算法的计算效率较低。如何在保证算法的性能的前提下通过算法优化以及背景空间的优化等方式提高检测算法的效率是很值得研究的内容。
3.光谱特征和空间特征是遥感图像的两大基本特征,也是进行遥感图像分析所
依据的两个基本要素。尤其是随着极高分辨率(VHR)影像的出现,图像的空间细节描述能力在日益提高,合理利用图像场景中的空间结构(如纹理,形状等)越来越受到重视。如何有效地将图像光谱信息和空间信息综合利用起来,切实提高目标检测精度,也将是遥感图像目标检测领域一大挑战。4.目标探测的自动化问题。在此基础上,开发完成包含完备算法集的自动实时
目标探测与分类系统。为了增强国防和打击目标的能力,开展高光谱遥感目标探测技术的研究非常必要而且具有极大的军用和民用意义。
6 小结
本综述主要介绍了与论文主题相关的各方面内容。主要是基于核方法高光谱遥感图像目标检测研究的目的意义、研究现状、面临的困难与挑战等。其中对国内外研究现状作了重点描述。
7 主要参考文献
[1] Josef P. Bishoff, Target Detection Using Oblique Hyperspectral Imagery:A Domain Trade Study[D]. Royal Military College of Canada,2002
[2] 杨国鹏,基于核方法的高光谱影像分类与特征提取[D].郑州:解放军信息工程大学,2007
[3]张永鹏. 基于核函数和自定类别数目的文本聚类问题研究[M]. 哈尔滨:哈尔滨理工大学,2008.
[4] 梅峰.基于核机器学习的高光谱异常目标检测算法研究[D]. 哈尔滨:哈尔滨工
程大学,2009.
[5] 王华忠,俞金寿.核函数方法及其模型选择[J].江南大学学报(自然科学版),2006,5(4):500一504
[6] Chang Cheng-I, Zhao Xiaoli, et al. Least squares subspace projection approach to mixed pixel classification for hyperspectral images [J]. IEEE Transactions on Geoscience and Remote Sensing, 1998,36(3): 898-912.
[7] Chiang SS, Chang CI, Ginsberg IW. Unsupervised target detection in hyperspectral images using projection pursuit. Geoscience and Remote Sensing, IEEE Transactions on Volume 39, Issue 7, July 2001:1380-1391.
[8] Ifarraguerri A, Chang CI. Multispectral and hyperspectral image analysis with convex cones. IEEE Transactions on Geoscience and Remote Sensing. 1999, 37(2):756 - 770.
[9] Kohli AK, Saxena R. Linearly constrained minimum variance beamforming using modified variable step size LMS adaptive algorithm. IETE Journal of Research. 2003, 49(4): 259-267. [10] Kwon H, Nasrabadi NM. Kernel adaptive subspace detector for hyperspectral target detection. Acoustics, Speech,and Signal Processing, 2005. Proceedings. (ICASSP '05). IEEE International Conference on Volume 4, 18-23 March 2005: iv/681 - iv/684.
[11] Kwon H, Nasrabadi NM. Hyperspectral target detection using kernel matched subspace detector. Image Processing, 2004. ICIP '04. 2004 International Conference on Volume 5, 24-27 Oct. 2004:3327 –3330.
[12] Kwon H, Nasrabadi NM.Hyperspectral Target Detection Using Kernel Orthogonal Subspace Projection. Image Processing, 2005. ICIP 2005. IEEE International Conference on Volume 2,
11-14 Sept. 2005:702 –705.
[13] Liu W, Chang CI. A nested spatial window-based approach to target detection for hyperspectral imagery. Geoscience and Remote Sensing Symposium, 2004. IGARSS '04. Proceedings. 2004 IEEE International Volume 1,2004.
[14] Plaza A, Martínez P, Plaza J, et al. Spatial/Spectral Analysis of Hyperspectral Image Data. Advances in Techniques for Analysis of Remotely Sensed Data, 2003 IEEE Workshop on 27-28 Oct. 2003: 298–307.
[15] Gu Y, Jia Y, Zhang Y. Unsupervised Hyperspectral Target Detection Based on Multisolution Image Fusion. Signal Processing, ICSP '04. 2004,2(31):1076 –1079.
[16] 李智勇, 匡纲要, 郁文贤, 薛绮. 基于高光谱图像主成分分量的小目标检测算法研究.
红外与毫米波学报. 2004,23(4): 286-290.
[17] 张兵. 时空信息辅助下的高光谱数据挖掘. 中国科学院研究生院(遥感应用研究所)博士论文. 2002 年.
[18] 路威, 余旭初, 杨国鹏, 等. 基于多尺度小波特征的高光谱影像亚像素目标识别.海洋测绘. 2005, 25(12): 21-25.
[19] 刘凯龙,孙向军,等. 地面目标伪装特征的高光谱成像检测方法. 解放军理工大学学报:自然科学版. 2005, 6(2):166-169.
[20] 贺霖,潘泉,邸韡,赵永强.一种基于单似然检验的高光谱图像小目标检测器.光学学报. 2007, 27(12): 2155-2162.
运动目标检测方法总结报告
摘要 由于计算机技术的迅猛发展,使得基于内容的视频信息的存取、操作和检索不仅成为一种可能,更成为一种需要。同时,基于内容的视频编码标准MPEG-4和基于内容的视频描述标准MPEG-7正在发展和完善。因此提取和视频中具有语义的运动目标是一个急需解决的问题。运动目标提取和检测作为视频和图像处理领域的重要研究领域,有很强的研究和应用价值。运动检测就是将运动目标从含有背景的图像中分离出来,如果仅仅依靠一种检测算法,难以从复杂的自然图像序列中完整地检测出运动的目标。较高的检测精度和效率十分重要,因此融合多种检测方法的研究越来越受到重视。本文介绍了几种国内外文献中的经典的视频运动目标的检测和提取算法,并对各种方法进行了评价和总结。首先介绍了基本的运动目标检测的基本知识和理论,然后介绍了基本的几种目标检测方法及其各种改进方法。对今后的运动目标检测提取的相关研究提供一定的参考。 关键词:运动目标检测光流法帧差法背景建模方法
ABSTRACT Because of the rapid development of computer technology, it is possible to access, operate and retrieve the video information based on the content of the video. At the same time, based on the content of the video coding standard MPEG-4 and content-based video description standard MPEG-7 is developing and improving. Therefore, it is an urgent problem to be solved in the extraction and video. Moving object extraction and detection is a very important field of video and image processing, and has a strong research and application value. Motion detection is to separate moving objects from the image containing background, if only rely on a detection algorithm, it is difficult to from a complex natural image sequences to detect moving target. Higher detection accuracy and efficiency are very important, so the study of the fusion of multiple detection methods is becoming more and more important. In this paper, the detection and extraction algorithms of the classical video moving objects in the domestic and foreign literatures are introduced, and the methods are evaluated and summarized. Firstly, the basic knowledge and theory of basic moving target detection is introduced, and then the basic method of target detection is introduced. To provide a reference for the research on the extraction of moving target detection in the future. Keywords: Visual tracking Optical flow method Frame Difference Background modeling method
目标检测综述教学内容
一、传统目标检测方法 如上图所示,传统目标检测的方法一般分为三个阶段:首先在给定的图像上选择一些候选的区域,然后对这些区域提取特征,最后使用训练的分类器进行分类。下面我们对这三个阶段分别进行介绍。 (1) 区域选择这一步是为了对目标的位置进行定位。由于目标可能出现在图像的任何位置,而且目标的大小、长宽比例也不确定,所以最初采用滑动窗口的策略对整幅图像进行遍历,而且需要设置不同的尺度,不同的长宽比。这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的:时间复杂度太高,产生冗余窗口太多,这也严重影响后续特征提取和分类的速度和性能。(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设置几个,所以对于长宽比浮动较大的多类别目标检测,即便是滑动窗口遍历也不能得到很好的区域) (2) 特征提取由于目标的形态多样性,光照变化多样性,背景多样性等因素使得设计一个鲁棒的特征并不是那么容易。然而提取特征的好坏直接影响到分类的准确性。(这个阶段常用的特征有SIFT、HOG等) (3) 分类器主要有SVM, Adaboost等。 总结:传统目标检测存在的两个主要问题: 一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余; 二是手工设计的特征对于多样性的变化并没有很好的鲁棒性。 二、基于Region Proposal的深度学习目标检测算法 对于传统目标检测任务存在的两个主要问题,我们该如何解决呢? 对于滑动窗口存在的问题,region proposal提供了很好的解决方案。region
proposal(候选区域)是预先找出图中目标可能出现的位置。但由于region proposal 利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个)的情况下保持较高的召回率。这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高(滑动窗口固定长宽比)。比较常用的region proposal算法有selective Search和edge Boxes,如果想具体了解region proposal可以看一下PAMI2015的“What makes for effective detection proposals?” 有了候选区域,剩下的工作实际就是对候选区域进行图像分类的工作(特征提取+分类)。对于图像分类,不得不提的是2012年ImageNet大规模视觉识别挑战赛(ILSVRC)上,机器学习泰斗Geoffrey Hinton教授带领学生Krizhevsky使用卷积神经网络将ILSVRC分类任务的Top-5 error降低到了15.3%,而使用传统方法的第二名top-5 error高达26.2%。此后,卷积神经网络占据了图像分类任务的绝对统治地位,微软最新的ResNet和谷歌的Inception V4模型的top-5 error降到了4%以内多,这已经超越人在这个特定任务上的能力。所以目标检测得到候选区域后使用CNN对其进行图像分类是一个不错的选择。 2014年,RBG(Ross B. Girshick)大神使用region proposal+CNN代替传统目标检测使用的滑动窗口+手工设计特征,设计了R-CNN框架,使得目标检测取得巨大突破,并开启了基于深度学习目标检测的热潮。 1. R-CNN (CVPR2014, TPAMI2015) (Region-based Convolution Networks for Accurate Object d etection and Segmentation)
高光谱成像检测技术
高光谱成像检测技术 一、高光谱成像技术的简介 高光谱成像技术是近二十年来发展起来的基于非常多窄波段的影像数据技术,其最突出的应用是遥感探测领域,并在越来越多的民用领域有着更大的应用前景。它集中了光学、光电子学、电子学、信息处理、计算机科学等领域的先进技术,是传统的二维成像技术和光谱技术有机的结合在一起的一门新兴技术。 高光谱成像技术的定义是在多光谱成像的基础上,在从紫外到近红外(200-2500nm)的光谱范围内,利用成像光谱仪,在光谱覆盖范围内的数十或数百条光谱波段对目标物体连续成像。在获得物体空间特征成像的同时,也获得了被测物体的光谱信息。 高光谱成像技术具有超多波段(上百个波段)、高的光谱分辨率(几个nm)、波段窄(≤10-2λ)、光谱范围广(200-2500nm)和图谱合一等特点。优势在于采集到的图像信息量丰富,识别度较高和数据描述模型多。由于物体的反射光谱具有“指纹”效应,不同物不同谱,同物一定同谱的原理来分辨不同的物质信息。 二、高光谱成像系统的组成和成像原理 高光谱成像技术的硬件组成主要包括光源、光谱相机(成像光谱仪+CCD)、装备有图像采集卡的计算机。光谱范围覆盖了200-400nm、400-1000nm、900-1700 nm、1000-2500 nm。 CCD 光源光栅光谱仪成像镜头
光谱相机的主要组成部分有:准直镜、光栅光谱仪、聚焦透镜、面阵CCD。 高光谱成像仪的扫描过程:面阵CCD探测器在光学焦面的垂直方向上做横向排列完成横向扫描(X方向),横向排列的平行光垂直入射到透射光栅上时,形成光栅光谱。这是一列像元经过高光谱成像仪在CCD上得到的数据。它的横向是X方向上的像素点,即扫描的一列像元;它的纵向是各像元所对应的光谱信息。 同时,在检测系统输送带前进的过程中,排列的探测器扫出一条带状轨迹从而完成纵向扫描(Y方向)。
高光谱图像分辨率增强及在小目标检测中的应用研究
高光谱图像分辨率增强及在小目标检测中的应用研究 高光谱遥感是在测谱学基础上逐渐发展起来的新型遥感技术,除了空间图像信息外,其所具有的精细光谱信息,克服了宽波段遥感探测的局限,被广泛应用于多种领域,成为对地观测最重要的信息源之一。但由于成像原理与制造技术等因素的限制,高光谱图像的空间分辨率相对较低,给进一步应用,如特定目标的检测识别带来一系列的问题。 为此,论文分别从信息融合和混合像素分解角度研究了高光谱图像的分辨率增强方法,旨在提高基于图谱结合的高光谱图像目标检测的性能。论文首先对遥感成像中涉及到的电磁波理论进行简单的介绍,分析了遥感图像的空间分辨率与光谱分辨率间的关系,即随着光谱分辨率的增加,在CCD等性能参数不变下,遥感图像的空间分辨率下降的原理。 并在介绍了高光谱图像特性的基础上,对PCA、MNF及LDA变换的降维算法的原理进行了分析,研究其各种算法的特点及应用范围。降维算法是重要的高光谱图像预处理技术,这一部分的工作为后文的开展打下一个基础。 然后对常用的高光谱图像目标检测算法进行了介绍。通过对支持向量数据描述的研究,分析并验证了其单类分类的性能及其适用范围;针对传统纯像素目标检测算法大部分无法解决目标与背景样本数量不平衡的问题,论文提出了基于SVDD的高光谱图像目标检测算法,把目标检测问题转化为单类分类问题。 实验结果表明,与经典的光谱角度制图和有约束能量最小化算法相比,该算法仅需要较少的目标类训练样本就可以得到与前两者相近的检测结果,当增加背景样本时,本文方法可以将目标更容易的从背景中分离出来,为利用空间信息进一步检测提高了便利,使最终的检测结果优于上述两种算法。针对空间分辨率的
目标检测方法简要综述
龙源期刊网 https://www.360docs.net/doc/f93899696.html, 目标检测方法简要综述 作者:栗佩康袁芳芳李航涛 来源:《科技风》2020年第18期 摘要:目标检测是计算机视觉领域中的重要问题,是人脸识别、车辆检测、路网提取等领域的理论基础。随着深度学习的快速发展,与基于滑窗以手工提取特征做分类的传统目标检测算法相比,基于深度学习的目标检测算法无论在检测精度上还是在时间复杂度上都大大超过了传统算法,本文将简单介绍目标检测算法的发展历程。 关键词:目标检测;机器学习;深度神经网络 目标检测的目的可分为检测图像中感兴趣目标的位置和对感兴趣目标进行分类。目标检测比低阶的分类任务复杂,同时也是高阶图像分割任的重要基础;目标检测也是人脸识别、车辆检测、路网检测等应用领域的理论基础。 传统的目标检测算法是基于滑窗遍历进行区域选择,然后使用HOG、SIFT等特征对滑窗内的图像块进行特征提取,最后使用SVM、AdaBoost等分类器对已提取特征进行分类。手工构建特征较为复杂,检测精度提升有限,基于滑窗的算法计算复杂度较高,此类方法的发展停滞,本文不再展开。近年来,基于深度学习的目标检测算法成为主流,分为两阶段和单阶段两类:两阶段算法先在图像中选取候选区域,然后对候选区域进行目标分类与位置精修;单阶段算法是基于全局做回归分类,直接产生目标物体的位置及类别。单阶段算法更具实时性,但检测精度有损失,下面介绍这两类目标检测算法。 1 基于候选区域的两阶段目标检测方法 率先将深度学习引入目标检测的是Girshick[1]于2014年提出的区域卷积神经网络目标检测模型(R-CNN)。首先使用区域选择性搜索算法在图像上提取约2000个候选区域,然后使用卷积神经网络对各候选区域进行特征提取,接着使用SVM对候选区域进行分类并利用NMS 回归目标位置。与传统算法相比,R-CNN的检测精度有很大提升,但缺点是:由于全连接层的限制,输入CNN的图像为固定尺寸,且每个图像块输入CNN单独处理,无特征提取共享,重复计算;选择性搜索算法仍有冗余,耗费时间等。 基于R-CNN只能接受固定尺寸图像输入和无卷积特征共享,He[2]于2014年参考金字塔匹配理论在CNN中加入SPP-Net结构。该结构复用第五卷积层的特征响应图,将任意尺寸的候选区域转为固定长度的特征向量,最后一个卷积层后接入的为SPP层。该方法只对原图做一
高光谱成像检测技术.
高光谱成像检测技术 、高光谱成像技术的简介 高光谱成像技术是近二十年来发展起来的基于非常多窄波段的影像数据技术, 其最突出的应用是遥感探测领域, 并在越来越多的民用领域有着更大的应用前景。 它集中了光学、光电子学、电子学、信息处理、计算机科学等领域的先进传统的二维成像技术和光谱技术有机的结合在一起的一门新兴技术。 技术,是高光谱成像 技术的定义是在多光谱成像的基础上,在从紫外到近红外(200-2500nm 的光谱范围内,利用成像光谱仪,在光谱覆盖范围内的数十或数百条光谱波段对目标物体连续成 像。在获得物体空间特征成像的同时, 也获得了被测物体的光谱信息。 高光谱成像技术具有超多波段(上百个波段、高的光谱分辨率(几个nm 、波 段窄(<1-2入光谱范围广(200-2500nm和图谱合一等特点。优势在于采集到的图像信息量丰富, 识别度较高和数据描述模型多。由于物体的反射光谱具有“指纹” 效应, 不同物不同谱, 同物一定同谱的原理来分辨不同的物质信息。、高光谱成像系统的组成和成像原理 高光谱成像技术的硬件组成主要包括光源、光谱相机(成像光谱仪+CCD 、装备有图像采集 卡的计算机。光谱范围覆盖了200-400nm 、400-1000nm 、900-1700 nm 、1000-2500 nm。
CC D 朮源「一光栅壯谱以 —a I \、 「维电移台 . 样品 A CCD。 光谱相机的主要组成部分有:准直镜、光栅光谱仪、聚焦透镜、面阵
高光谱成像仪的扫描过程:面阵CCD探测器在光学焦面的垂直方向上做横向排列完成横向扫描(X方向,横向排列的平行光垂直入射到透射光栅上时,形成光栅光谱。这是一列像元经过高光谱成像仪在CCD上得到的数据。它的横向是X方 向上的像素点,即扫描的一列像元;它的纵向是各像元所对应的光谱信息。 同时,在检测系统输送带前进的过程中,排列的探测器扫出一条带状轨迹从而完成纵向扫描(丫方向。 1\ 综合横纵扫描信息就可以得到样品的三维高光谱图像数据。
高光谱图像分类
《机器学习》课程项目报告 高光谱图像分类 ——基于CNN和ELM 学院信息工程学院 专业电子与通信工程 学号 35 学生姓名曹发贤 同组学生陈惠明、陈涛 硕士导师杨志景 2016 年 11 月
一、项目意义与价值 高光谱遥感技术起源于 20 世纪 80年代初,是在多光谱遥感技术基础之上发展起来的[1]。高光谱遥感能够通过成像光谱仪在可见光、近红外、短波红外、中红外等电磁波谱范围获取近似连续的光谱曲线,将表征地物几何位置关系的空间信息与表征地物属性特征的光谱信息有机地融合在了一起,使得提取地物的细节信息成为可能。随着新型成像光谱仪的光谱分辨率的提高,人们对相关地物的光谱属性特征的了解也不断深入,许多隐藏在狭窄光谱范围内的地物特性逐渐被人们所发现,这些因素大大加速了遥感技术的发展,使高光谱遥感成为 21 世纪遥感技术领域重要的研究方向之一。 在将高光谱数据应用于各领域之前,必须进行必要的数据处理。常用的数据处理技术方法包括:数据降维、目标检测、变化检测等。其中,分类是遥感数据处理中比较重要的环节,分类结果不但直接提取了影像数据有效信息,可以直接运用于实际需求中,同时也是实现各种应用的前提,为后续应用提供有用的数据信息和技术支持,如为目标检测提供先验信息、为解混合提供端元信息等。 相对于多光谱遥感而言,由于高光谱遥感的波谱覆盖范围较宽,因此我们可以根据需要选择特定的波段来突显地物特征,从而能够精确地处理地物的光谱信[2]。目前,许多国家开展大量的科研项目对高光谱遥感进行研究,研制出许多不同类型的成像光谱仪。高光谱遥感正逐步从地面遥感发展到航空遥感和航天遥感,并在地图绘制、资源勘探、农作物监测、精细农业、海洋环境监测等领域发挥重要的作用。
(完整版)视频目标检测与跟踪算法综述
视频目标检测与跟踪算法综述 1、引言 运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在视频编码、智能交通、监控、图像检测等众多领域中。本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。 2、视频监控图像的运动目标检测方法 运动目标检测的目的是把运动目标从背景图像中分割出来。运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。所有这些特点使得运动目标的检测成为一项相当困难的事情。目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。 2.1帧差法 帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设f k(x, y)和f(k i)(x, y)分别为图像序列中的第k帧和第k+1帧中象素点(x,y)的象素值,则这两帧图像的差值图像就如公式2-1所示: Diff ki f k(x, y) f(k 1)(x, y)(2-1)2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。利用此原理便可以提取出目标。下图给出了帧差法的基本流程:1、首先利用2-1式得到第k帧和第k+1帧的差值图像Diff k 1;2、对所得到的差值图像Diff k 1二值化(如 式子2-2示)得到Qk+1 ;3、为消除微小噪声的干扰,使得到的运动目标更准 确,对Q k 1进行必要的滤波和去噪处理,后处理结果为M k 1。 1
利用高光谱图像技术检测水果轻微损伤
高光谱图像技术检测苹果轻微损伤 摘要 传统的近红外光谱分析法和可见光图像技术应用于水果品质无损检测 中存在的检测区域小、检测时间长、仅能检测表面情况等局限性。提出了 利用高光谱图像技术检测水果轻微损伤的方法。试验以苹果为研究对象, 利 用 500~ 900nm范围内的高光谱图像数据, 通过主成分分析提取 547nm 波长 下的特征图像, 然后设计不均匀二次差分消除了苹果图像亮度分布不均匀 的影响, 最后通过合适的数字图像处理方法提取苹果的轻微损伤。 关键词: 无损检测苹果高光谱图像检测轻微损伤 引言 水果在采摘或运输过程中, 因外力的作用使其表皮受到机械损伤, 损伤处 表皮未破损, 伤面有轻微,色稍变暗, 肉眼难于觉察。受水果色泽的影响, 传统的计算机视觉技术不能对轻微损伤加以检测。但是轻微损伤是水果在线检测的主要指标之一, 随着时间的延长, 轻微损伤部位逐渐褐变, 最终导致整个果实腐 烂并影响其他果实。因此, 水果轻微损伤的快速有效检测是目前研究的难点和热点之一。虽然轻微损伤和正常区域在外部特征上呈现出极大的相似性, 但是损伤区域的内部组织发生一定的变化, 这种变化可以通过特定波长下的光谱表现出来。 当前, 一种能集成光谱检测和图像检测优点的新技术。高光谱图像技术正好能满足水果表面轻微损伤检测的需要。高光谱图像技术是光谱分析和图像处理在最低层面上的融合技术, 可以对研究对象的内外部特征进行可视化分析。在国内, 高光谱图像技术在农畜产品品质检测的应用还没有相关的文献报道; 在国外, 近几年来有部分学者将该技术应用于肉类和果蔬类的品质检测上。 本文采用高光谱图像技术对水果表面轻微损伤检测进行研究, 并通过合适 的数据处理方法寻找到最能准确辨别水果表面损伤的特征波长下的图像, 为实 现高光谱图像技术对水果轻微损伤的在线检测提供依据。 1 高光谱图像基本原理 高光谱图像是在特定波长范围内由一系列波长处的光学图像组成的三维图 像块。图 1 为苹果的高光谱图像三维数据块示意图。图中, x 和y 表示二维平面坐标轴, K表示波长信息坐标轴。可以看出,高光谱图像既具有某个特定波长 下的图像信息,并且针对 xy 平面内某个特定像素又具有不同波长下的光谱n
高光谱图像的异常目标检测及亚像元定位研究
硕士学位论文 高光谱图像的异常 目标检测及亚像元定位研究 RESEARCH ON ANOMALY TARGET DETECTION AND SUBPIXEL MAPPING IN HYPERSPECTRAL IMAGERY 朱凤阳 哈尔滨工业大学 2009年6月
国内图书分类号:TN911.73 学校代码:10213 国际图书分类号:621.3 密级:公开 硕士学位论文 高光谱图像的异常 目标检测及亚像元定位研究 硕士研究生:朱凤阳 导 师:张钧萍教授 申请学位:工学硕士 学科:信息与通信工程 所在单位:电子与信息工程学院 答辩日期:2009年6月 授予学位单位:哈尔滨工业大学
Classified Index: TN911.73 U.D.C.: 621.3 Dissertation for the Master Degree in Engineering RESEARCH ON ANOMALY TARGET DETECTION AND SUBPIXEL MAPPING IN HYPERSPECTRAL IMAGERY Candidate:Zhu Fengyang Supervisor:Prof. Zhang Junping Academic Degree Applied for:Master of Engineering Specialty:Information and Communication Engineering Affiliation: School of Electronics and Information Engineering Date of Defence: June, 2009 Degree-Conferring-Institution:Harbin Institute of Technology
(完整word版)基于图像处理的运动物体的跟踪与检测开题报告
1、课题来源 随着计算机技术的高速发展,运动物体的检测和跟踪在图像处理、计算机视觉、模式识别、人工智能、多媒体技术等领域越来越受到人们的关注。运动跟踪和检测的应用广泛,在智能监控和人机交互中,如:银行、交通、超市等场合常常使用运动跟踪分析技术,通过定位物体并对其行为进行分析,一旦发现物体有异常行为,监控系统就发出警报,提醒人们注意并即时的处理,改善了人工监督注意力分散、反应时间较慢、人力资源浪费等问题。运动目标的跟踪在虚拟现实、工业控制、军事设备、医学研究、视频监控、交通流量观测监控等很多领域也有重要的实用价值。特别在军事上,先进的武器导航、军事侦察和监控中都成功运用了自动跟踪技术。而跟踪的难点在于如何快速而准确的在每一帧图像中实现目标定位。正因如此,对运动目标的跟踪和检测的研究很有价值。 2、研究目的和意义 运动目标检测是图像处理与计算机视觉的一个分支,在理论和实践上都有重大意义,长久以来一直被国内外学者所关注。在实际中,视频监控利用摄像机对某一特定区域进行监视,是一个细致和连续的过程,它可以由人来完成,但是人执行这种长期枯燥的例行监测是不可靠,而且费用也很高,因此引入运动监测非常有必要。它可以减轻人的负担,并且提高了可靠性。概括起来运动监测主要包括三个内容:运动目标检测,方向判断和图像跟踪。运动目标检测是整个监测过程的基础,运动目标的提取准确与否,直接关系到后续高级过程的完成质量。3、国内外研究现状和发展趋势及综述 运动目标检测在国外已经取得了一些的研究成果,许多相关技术已经开始应用到实际系统中,但是国内研究相对落后,与国外还有较大差距。传统的视频目标提取大致可以分两类,一类以空间同性为准则,先用形态学滤波器或其他滤波器对图像作预处理;然后对该图像的亮度、色度或其他信息作空间上的分割以对区域作边缘检测;之后作运动估计,并合并相似的运动区域以得到最终的提取结果。如光流算法、主动轮廓模型算法。此类方法结果较为准确但是运算量相对较大。另一类算法主要以时间变化检测作为准则,这类算法主要通过帧差检测图像上的变化区域和不变区域,将运动物体与静止背景进行分割。此类方法运算量小,提取结果不如前类方法准确。此外,还有时空结合方法、时空亮度梯度信息结合的方法等等。 4、研究方法
交通场景中运动目标的检测文献综述
交通场景中运动目标的检测文献综述 摘要:运动目标检测是数字图像处理技术的一个主要部分,是一种基于视频监控系统的运动目标检测方法。这种算法主要包括:图像预处理、运动目标的检测、运动速度的求取。运动目标分割是实现交通场景下车辆检测的前提。常用的分割方法可以分为背景差分法、帧间差分法和基于光流的分割方法等。 关键词:数字图像处理;运动目标;检测方法 1 前言 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睐,并且取得了丰硕的成果,广泛英语与交通管理、军事目标跟踪、生物医学等领域。 目前,以数字图像处理技术为核心的视频监视系统越来越广泛地应用到交通监管中,它利用摄像机来获取图像,由计算机完成对运动目标的自动检测,如果车辆交通违规时,自动发出预警,记录全程违章视频,这在很大程度上减轻了监控人员的劳动强度,克服可能的人为失误,而且节省大量存储空间,使存储的数据更为有效,为交通违规的后续处理提供了客观依据。 交通场景中运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志的相关信息,初步建立起交通场景中运动目标检测课题研究的整体思路和方法。 2 正文 2.1运动目标 运动目标是常生活中常见的.如活动的动物、行驶的运载工具等。在现实生活中,尽管人类的视觉既能看见运动又能看见静止的物体,但是在交通这样的复杂场景中大量有意义的视觉信息都包含在这些运动之中,人们往往只对运动的
物体或目标感兴趣。因此,研究运动目标的检测问题,有着很大的现实意义和应用价值。 2.2运动目标检测的基本概念 目前我们主要是通过对动态图像进行分析处理来获取运动目标信息,从而实现对运动目标的检测,它是图像处理与计算机视觉应用研究领域的一个重要课题。,所谓动态图像是由一序列图像组成的,即图像序列。图像序列是用一个传感器(如摄像机、数码相机)采集的一组随时间变化的图像,不同时刻采集的二帧图像或多帧图像中包含了存在于相机与景物之间的相对运动信息。还有景物本身发生变化的运动信息等等,这些信息表现为图像帧之间的灰度变化或诸如点、线、区域等记号的位置和运动方向速度等属性的变化。 运动目标检测的目的就是从序列图像中将变化区域从背景图像中提取出来。我们首先用摄像机获取运动目标的视频影像,经视频采集卡将视频信号传输到计算机,利用计算机对其进行相关处理,从视频图像中按一定时间间隔获取序列图像,然后通过对这些序列图像进行特定的处理,就可以检测出我们感兴趣的运动目标。 运动目标检测和分析是一种基于视频监控系统的运动目标检测方法。这种算法主要包括:图像预处理、运动目标的检测、运动速度的求取。这种算法在帧差法的基础之上,提取出运动目标,并对其求取运动速度。这种技术可以用于各类图像监控系统,用来检测运动目标,对于现实应用有重要意义。 2.3运动目标检测的基本方法 由运动目标所形成的图像序列可分为两种情况:一种是静止背景,一种是运动背景。前一种情况通常发生在摄像机相对静止状态(如监视某一路口车流量的固定摄像机),后一种情况通常发生在摄像机也在相对运动状态(如装在卫星或飞机上的监视系统)。从处理方法上看,对前一种情况可采用消除背景的方法检测运动目标,处理起来比较简单,如简单的帧间差分或自适应背景对消方法。对后一种情况.处理起来比较复杂,一般是采用突出目标或消除背景的思想检测运动目标。若采用消除背景的方法,则通常需要先进行帧间稳像及配准;若采用突出
视频中移动目标检测综述
基于视频的移动目标检测 论文研读报告 苏航00748178 智能科学系信息科学技术学院 北京大学 摘要 基于视频的移动目标检测是一个重要且有挑战性的任务,在许多应用中都起到相当关键的作用。本次论文研读围绕该主题展开,深入阅读了十余篇论文,在本文总结了视频中移动目标检测的一些主要方法及各自的优劣,并将几个重要的方法大致分为了两个不同的类别:基于像素的移动目标检测和基于区域的移动目标检测。在基于像素的方法中,图像特征完全由各个像素的坐标及灰度值(或颜色值)确定,而在基于区域的方法中,各个像素属性之间的关联成为主要特征来用以提取移动目标。另外本文还讨论了以上两类之外的一些方法。 关键词 视频移动目标检测背景差分高斯混合模型直方图 正文 1 引言 基于视频的移动目标检测在许多实际应用中都担当着核心的任务。譬如视频监视、人机交互、视频编码等广泛的领域都需要有效地进行该工作。帧差法(Frame Differencing)12是视频中检测移动目标最简单直观的方法,其在视频片段中固定间隔的两帧之间计算绝对差,该差值大于一定阈限的像素就认为是运动物体可能存在的区域: D t(x,y)=Abs.F t(x,y)?F t?k(x,y)/(1) 这种简单的方法有时十分有效,但在更多应用环境下并不能获得期望的效果。这主要是由于视频中各帧之间的差异并不仅仅来源于运动的物体,而同时可能来 1R. Jain and H. Nagel, “On the Analysis of Accumulative Difference Pictures from Image Sequences of Real World S cenes”, IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 1, no. 2, pp. 206–214, 1979. 2为了避免混淆,本文中将作为主要研读对象的文章列在报告最后的“参考文献”一栏中,而其他引用的 文献则作为脚注注明。
基于扩展数学形态学的高光谱亚像元目标检测_英文_刘畅
第44卷第10期红外与激光工程2015年10月Vol.44No.10Infrared and Laser Engineering Oct.2015 Hyperspectral subpixel target detection based on extended mathematical morphology Liu Chang,Li Junwei (Science and Technology on Optical Radiation Laboratory,Beijing100854,China) Abstract:A hyperspectral subpixel target detection algorithm was proposed based on extended mathematical morphology and spectral angle mapping.The spectral and spatial information had been used to locate and detect targets under the condition that prior knowledge of targets and background was unknown.Then hyperspectral subpixel targets was detected and recognized.The extended mathematical morphological erosion and dilation operations were performed respectively to extract endmembers.The spectral angle mapping method was used to detect and recognize interested targets.The hyperspectral image collected by AVIRIS was applied to evaluate the proposed algorithm.The proposed algorithm was compared with SAM algorithm and RX algorithm by a specifically designed experiment.From the results of the experiments,it is illuminated that the proposed algorithm can detect subpixel targets with low false alarm rate and its performance is better than that of the other algorithms under the same condition. Key words:extended mathematical morphology;spectral angle mapping;hyperspectral image endmember extraction;subpixel target detection CLC number:TP751Document code:A Article ID:1007-2276(2015)10-3141-07 基于扩展数学形态学的高光谱亚像元目标检测 刘畅,李军伟 (光学辐射重点实验室,北京100854) 摘要:提出了一种基于扩展数学形态学和光谱角度匹配相结合的高光谱亚像元目标检测算法。在目标与背景未知的情况下,同时利用光谱和空间信息实现目标的定位与检测,实现高光谱亚像元目标的检测识别。通过扩展的形态学膨胀和腐蚀运算实现端元提取,采用光谱角度匹配算法进行感兴趣目标的检测识别。算法性能通过AVIRIS数据进行评价,与仅利用光谱角度匹配的算法和RX异常检测算法进行比较。实验证明,所提出的算法性能优于其他两种算法,具有低虚警率的亚像元目标检测结果。 关键词:扩展数学形态学;光谱角度匹配;高光谱图像;端元提取;亚像元目标检测 收稿日期:2015-02-20;修订日期:2015-03-28 作者简介:刘畅(1988-),男,工程师,硕士,研究方向为高光谱目标特性技术和光谱数据处理技术等。Email:531093626@https://www.360docs.net/doc/f93899696.html,
运动目标检测
运动目标检测 跟踪各过程算法综述图像预处理数字图像中的几种典型噪声有:高斯噪声来源于电子电路噪声和低照明度或高温带来的传感器噪声椒盐噪声类似于随机分布在图像上的胡椒和盐粉微粒主要由图像切割引起或变换域引起的误差加性噪声是图像在传输中引进的信道噪声。一般来说引入的都是加性随机噪声可以采用均值滤波、中值滤波、高斯滤波等方法去除噪声提高信噪比。均值滤波在噪声分布较平均且峰值不是很高的情况下能够得到较好的应用中值滤波对尖脉冲噪声的滤除有较好的效果并且能突出图像的边缘和细节高斯滤波对滤除高斯白噪声有较好的效果。运动目标检测背景差分法:能完整、快速地分割出运动对象。不足之处易受光线变化的影响背景的更新是关键。不适用摄像头运动的情况。光流法:能检测独立运动的对象可用于摄像头运动的情况但计算复杂耗时很难实时检测。帧差法:受光线变化影响较小简单快速但不能分割出完整的运动对象需进一步运用目标分割算法。还有一些改进的算法主要致力于减少光照影响和检测慢速物体变化。图像标识图像标识的作用是确定物体是否独立图像中有几个运动目标。 1领域:常取周围的4或8个像素作为领域。 2连通域:二值图像中互相连通的0像素集或1像素集称之为连通域。被1像素包围的0像素叫做孔。1像素连通域不含孔时叫做单连通成分含有一个或多个孔的连通成为叫做多重连通成分。 3标记:差值后的一帧图像可能存在多个连通域每个非连通域对应一个目标图像区给各目标区分配相应标号的工作成为标记。标识过程大致为:按一定顺序逐个扫描像素扫描到1的像素检测其领域的像素值若一样则为连通域并标记为第一个目标然后依次寻找下一个目标。在所有可能的目标都找到了之后可以为每个目标划出一个波门将目标框起来。并建立一个多目标位置链表找到的每一个目标区域的中心位置都作为一个结点加入该链表储存起来。波门的划分有可能将同一个目标分为两个部分或者一个波门里包括了两个目标使得目标数据错误增加或减少所以还要判断当前的目标是属于同一个目标还是不同的目标这将在后面的图像分割中完成。图像分割图像分割用于分离目标和背景的组合或者分离不同目标的组合。图像分割不仅可以大量压缩数据减少储存容量而且能大大简化其后的分析和处理步骤。 1直方图阈值分割法灰度直方图即为灰度级的像素数与灰度的二维关系反映了一副图像灰度分布的统计特性。如果前景物体内部灰度值分布比较均匀背景灰度值的分布也比较均匀这个图像的直方图将有明显的双峰这时可以选择两峰之间的谷底作为阈值。由于直方图不含目标的位置信息还要结合图像的内容来确定。 2最大类间方差阈值分割法利用图像目标与背景这两类的总体灰度之间存在的差距确定阈值从而进行分割。 3区域生长法指将周围特性相似的像素再次合并到目标区域中。 4边缘检测和轮廓提取分割法 5形态学分割法主要作用是使运动目标的区域更加完整。腐蚀的作用是消除物体边界点把小于结构元素的物体去除。如果两物体之间有细小的连通那么当结构元素足够大时通过腐蚀运算可以将两个物体分开。膨胀运算的作用是把图像周围的背景点合并到物体中。如果两个物体比较接近那么膨胀运算可能会使这两个物体连通在一起。膨胀对填补图像的空洞很有用膨胀最简单的应用之一就是将裂缝接起来。形态学也可用于图像滤波、增强等方面。运动轨迹预测在分割出运动目标后应提取出目标的特征然后在下一帧图像中匹配特征从而跟踪目标。但为了减少搜索特征匹配的区域提高实时性在此加入对目标运动轨迹预测这一步骤。运动轨迹预测也有利于增强遮挡情况下跟踪的鲁棒性。 1线性预测算法2Kalman滤波算法及其扩展算法 3粒子滤波算法目标跟踪 1特征选取灰度特
完整版目标检测综述
一、传统目标检测方法 首先在给定的图像上传统目标检测的方法一般分为三个阶段:如上图所示,最后使用训练的分类器进行分然后对这些区域提取特征,选择一些候选的区域,类。下面我们对这三个阶段分别进行介绍。由于目标可能出现在这一步是为了对目标的位置进行定位。区域选择(1) 所以最初采用滑动窗口而且目标的大小、长宽比例也不确定,图像的任何位置,这种穷而且需要设置不同的尺度,不同的长宽比。的策略对整幅图像进行遍历,时间举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的:这也严重影响后续特征提取和分类的速度和性复杂度太高,产生冗余窗口太多,(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设能。即便是滑动窗口遍历也不所以对于长宽比浮动较大的多类别目标检测,置几个,能得到很好的区域) 由于目标的形态多样性,光照变化多样性,背景多样性等因特征提取(2)然而提取特征的好坏直接影响到分素使得设计一个鲁棒的特征并不是那么容易。HOG等)(这个阶段常用的特征有类的准确性。SIFT、等。主要有SVM, Adaboost分类器(3) 总结:传统目标检测存在的两个主要问题:一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余;二是手工设计的特征对于多样性的变化并没有很好的鲁棒性。 的深度学习目标检测算法二、基于Region Proposal对于传统目标检测任务存在的两个主要问题,我们该如何解 决呢?region 提供了很好的解决方案。proposalregion 对于滑动窗口存在的问题, proposal(候选区域)是预先找出图中目标可能出现的位置。但由于region proposal 利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个)的情况下保持较高的召回率。这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高(滑动窗口固定长宽比)。比较常用的region proposal算法有selective Search和edge Boxes,如果想具体了解region proposal可以看一下PAMI2015的“What makes for effective detection proposals?” 有了候选区域,剩下的工作实际就是对候选区域进行图像分类的工作(特征提取+分类)。对于图像分类,不得不提的是2012年ImageNet大规模视觉识别挑战赛(ILSVRC)上,机器学习泰斗Geoffrey Hinton教授带领学生Krizhevsky使用卷积神经网络将ILSVRC分类任务的Top-5 error降低到了15.3%,而使用传统方法的第
高光谱成像技术进展(光电检测技术大作业)
高光谱成像技术进展 By 130405100xx 一.高光谱成像技术的简介 高光谱成像技术的出现是一场革命,尤其是在遥感界。它使本来在宽波段不可探测的物质能够被探测,其重大意义已得到世界公认。高光谱成像技术光谱分辨率远高于多光谱成像技术,因此高光谱成像技术数据的光谱信息更加详细,更加丰富,有利于地物特征分析。有人说得好,如果把多光谱扫描成像的MSS ( multi-spectral scanner) 和TM( thematic mapper) 作为遥感技术发展的第一代和第二代的话, 那么高光谱成像( hyperspectral imagery) 技术则是第三代的成像技术。 高光谱成像技术的具体定义是在多光谱成像的基础上,从紫外到近红外(200-2500nm)的光谱范围内,利用成像光谱仪,在光谱覆盖范围内的数十或数百条光谐波段对目标物体连续成像。在获得物体空间特征成像的同时,也获得了被测物体的光谱信息。 (一)高光谱成像系统的组成和成像原理 而所谓高光谱图像就是在光谱维度上进行了细致的分割,不仅仅是传统所谓的黑、白或者R、G、B的区别,而是在光谱维度上也有N个通道,例如:我们可以把400nm-1000nm分为300个通道。因此,通过高光谱设备获取到的是一个数据立方,不仅有图像的信息,并且在光谱维度上进行展开,结果不仅可以获得图像上每个点的光谱数据,还可以获得任一个谱段的影像信息。 目前高光谱成像技术发展迅速,常见的包括光栅分光、声光可调谐滤波分光、棱镜分光、芯片镀膜等。下面分别介绍下以下几种类别: (1)光栅分光光谱仪 空间中的一维信息通过镜头和狭缝后,不同波长的光按照不同程度的弯散传播,这一维图像上的每个点,再通过光栅进行衍射分光,形成一个谱带,照射到探测器上,探测器上的每个像素位置和强度表征光谱和强度。一个点对应一个谱段,一条线就对应一个谱面,因此探测器每次成像是空间一条线上的光谱信息,为了获得空间二维图像再通过机械推扫,完成整个平面的图像和光谱数据采集。